
Airspace Geofencing and Flight Planning for Low-Altitude, Urban, Small Unmanned Aircraft Systems


Abstract
:1. Introduction
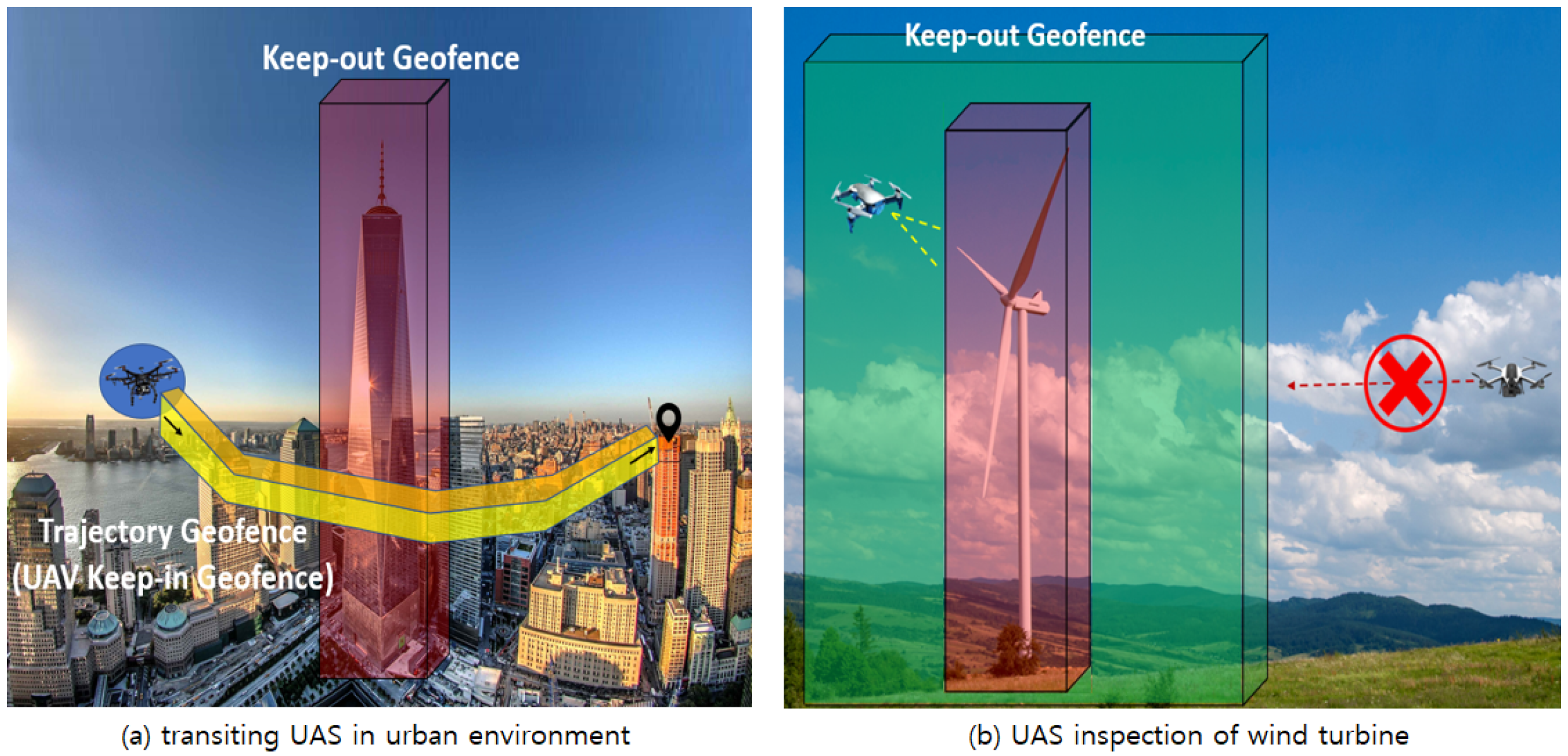
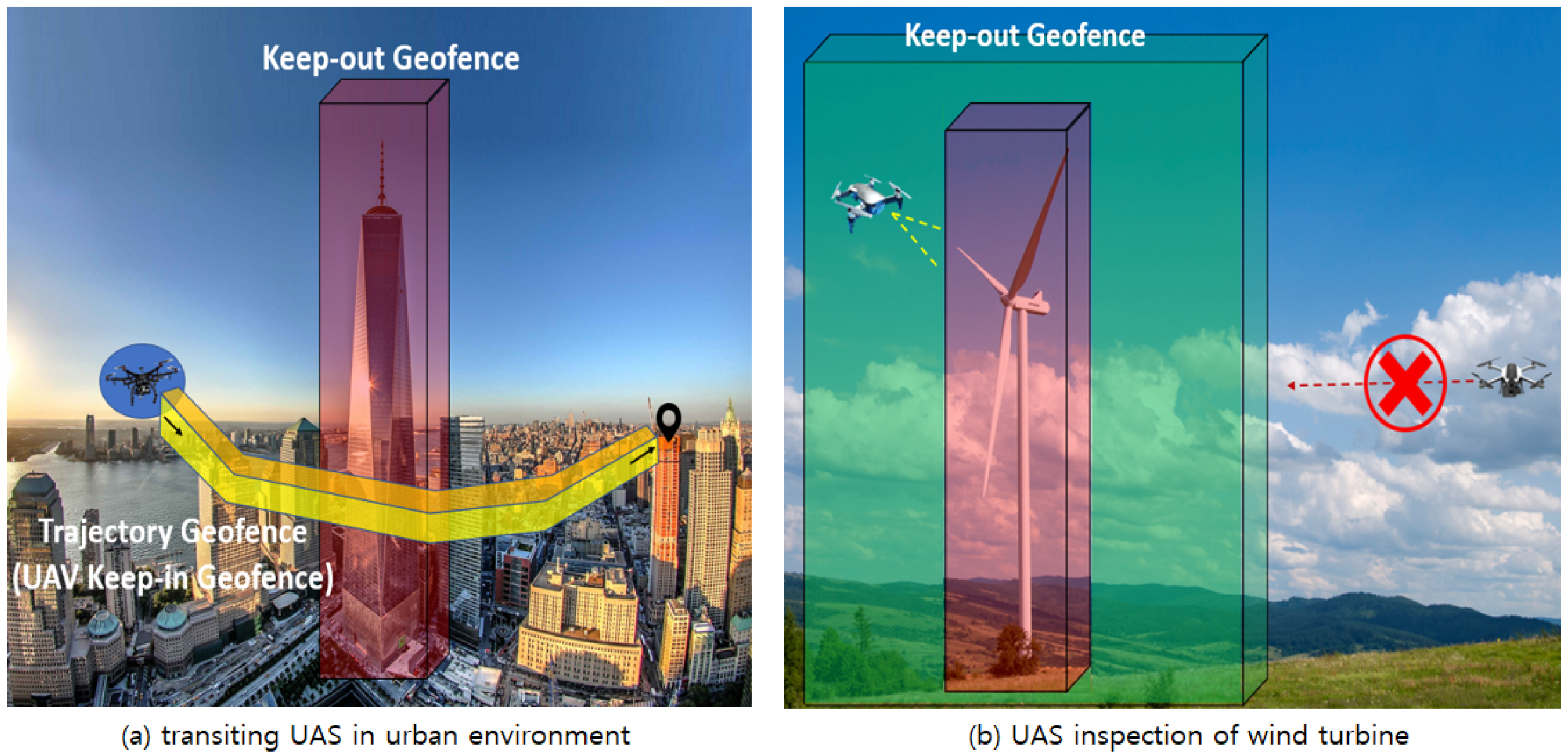
- The specification of formal algorithms to define keep-in/keep-out geofences for obstacles to plan UAS paths with separation assurance;
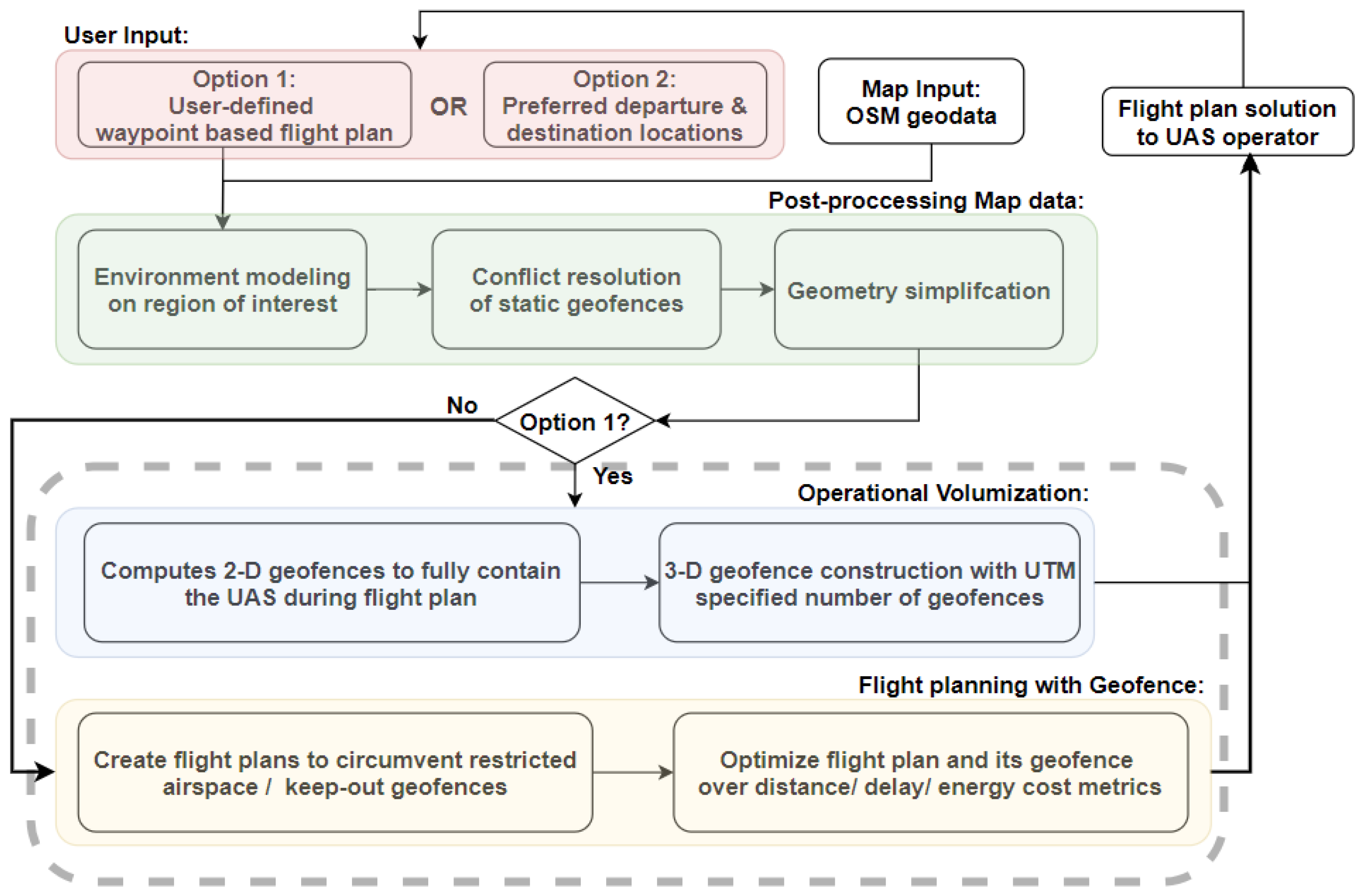
- The integration of airspace and environmental geofencing processing pipelines with user inputs to construct geofences and geofence-wrapped path plans in a real-world urban environment;
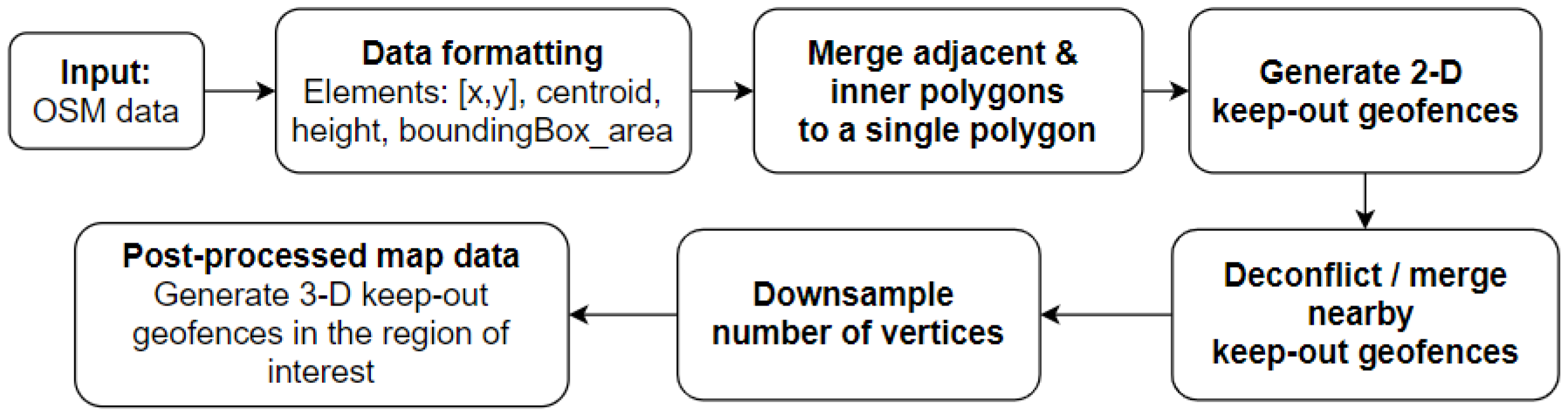
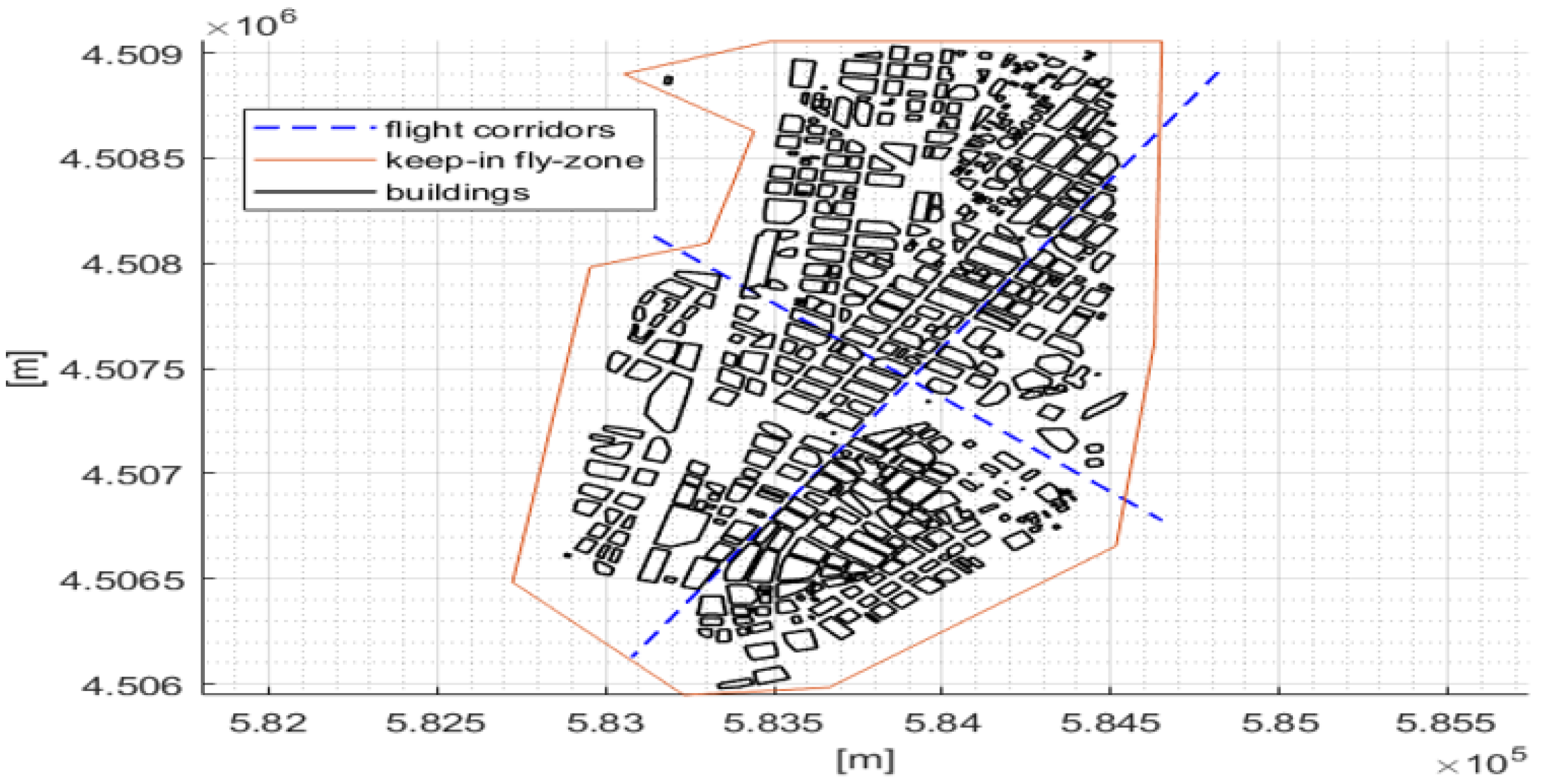
- Map data processing to generate keep-out geofences around buildings and terrain and a process to simplify a detailed map dataset to support a more compact representation and improved path planning efficiency;
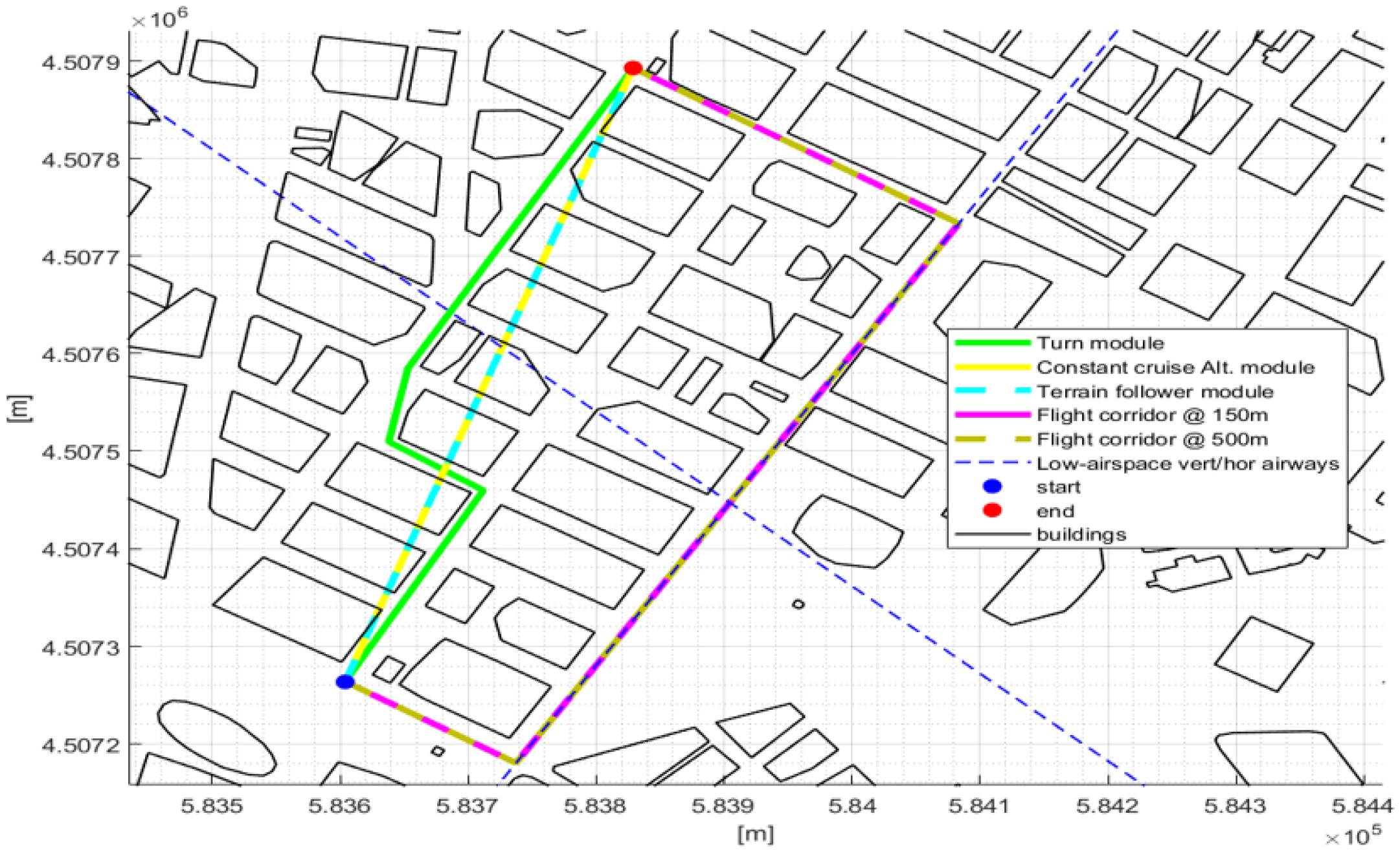
- A benchmark comparison of our geofenced path planning solutions with a fixed sUAS airway flight corridor design, and a case study of sUAS route deconfliction in shared airspace.
2. Literature Review
2.1. Unmanned Traffic Management and Geofencing
2.2. Computational Geometry
2.3. Path Planning
3. Definitions and Algorithms
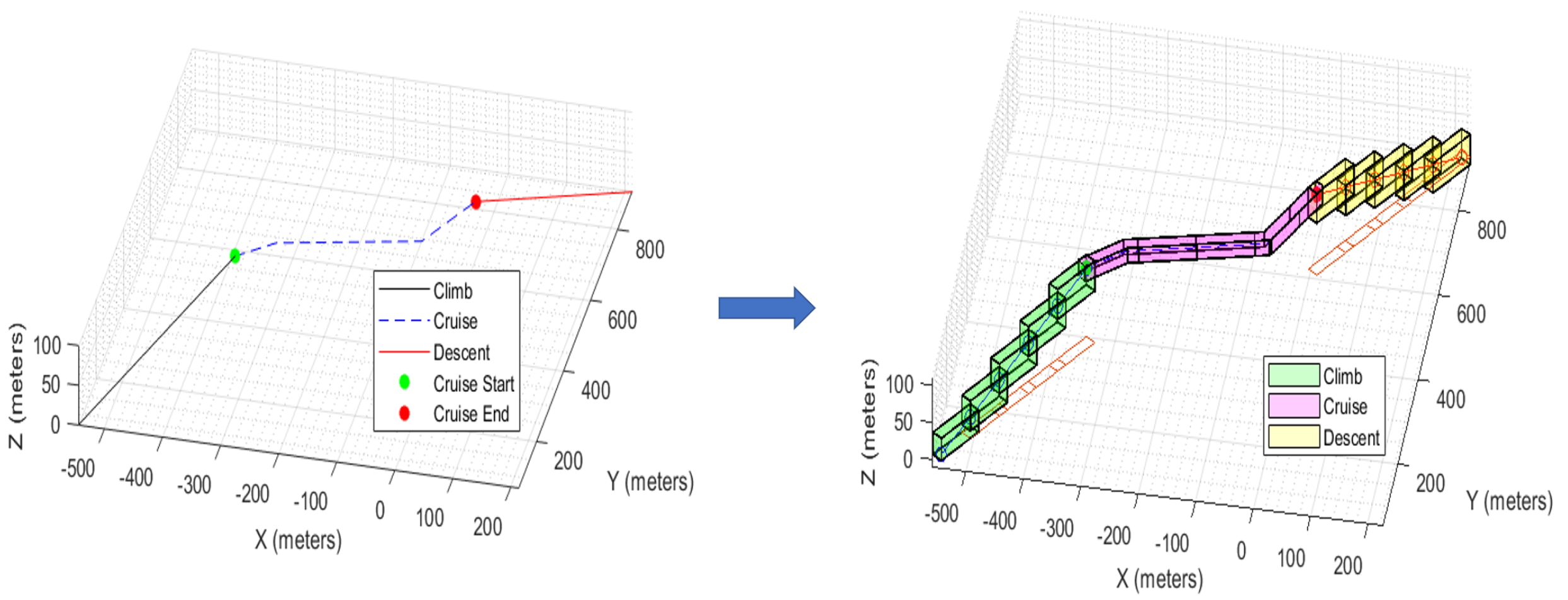
3.1. Airspace Operational Volumization
| Algorithm 1 3D Flight Trajectory Operational Volumization (3dOperVol). |
| Inputs: 2-D Trajectory waypoints , Velocity , Time to Climb , Time to Descent , Number of Geofence , UAS Safety Buffer , Cruise Altitude Outputs: 3-D Flight Trajectory , 3-D Geofence for 3-D Flight Trajectory Algorithm:
|
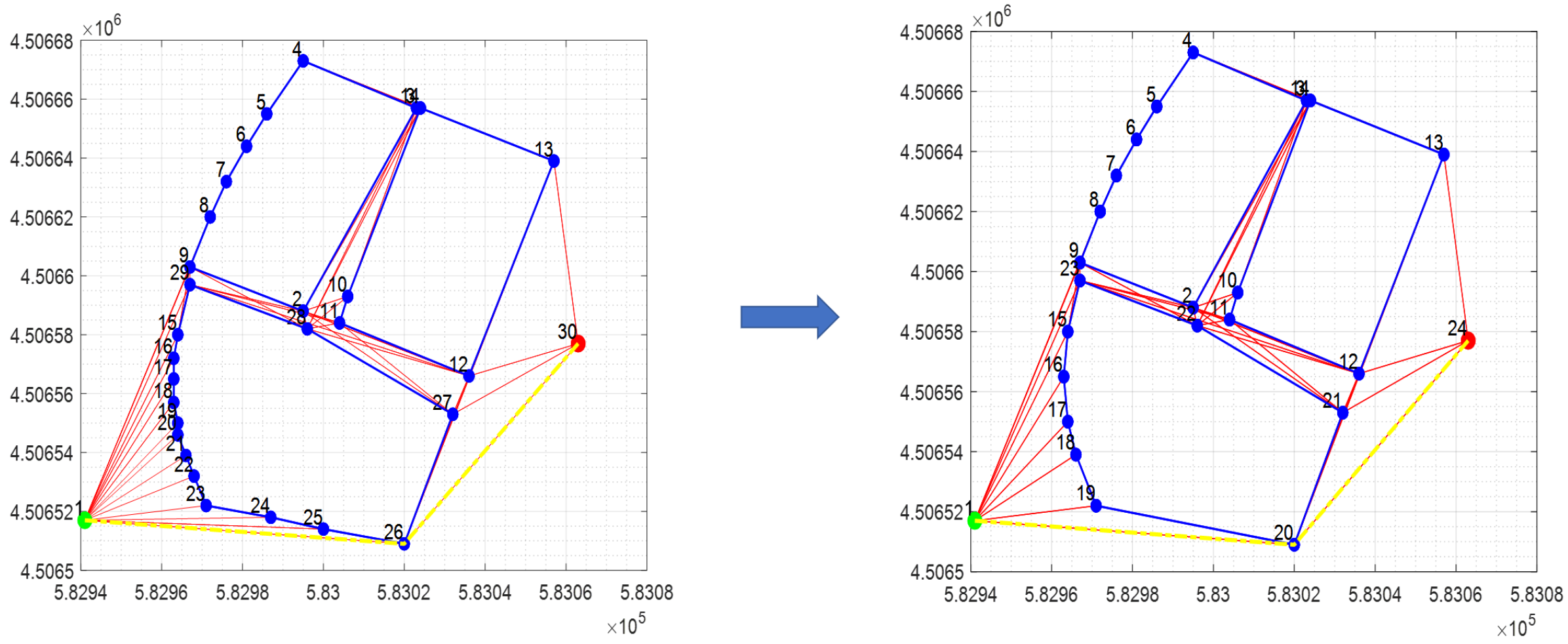
3.2. Constructing a Geofence Volume from an Urban Map
| Algorithm 2 Reduce Map Geofence Vertex Set. |
| Inputs: Set of Keep-out Geofences , Downsample Threshold , Downsample Tolerance In Percentage Outputs: Set of Downsampled Keep-out Geofences Algorithm:
|
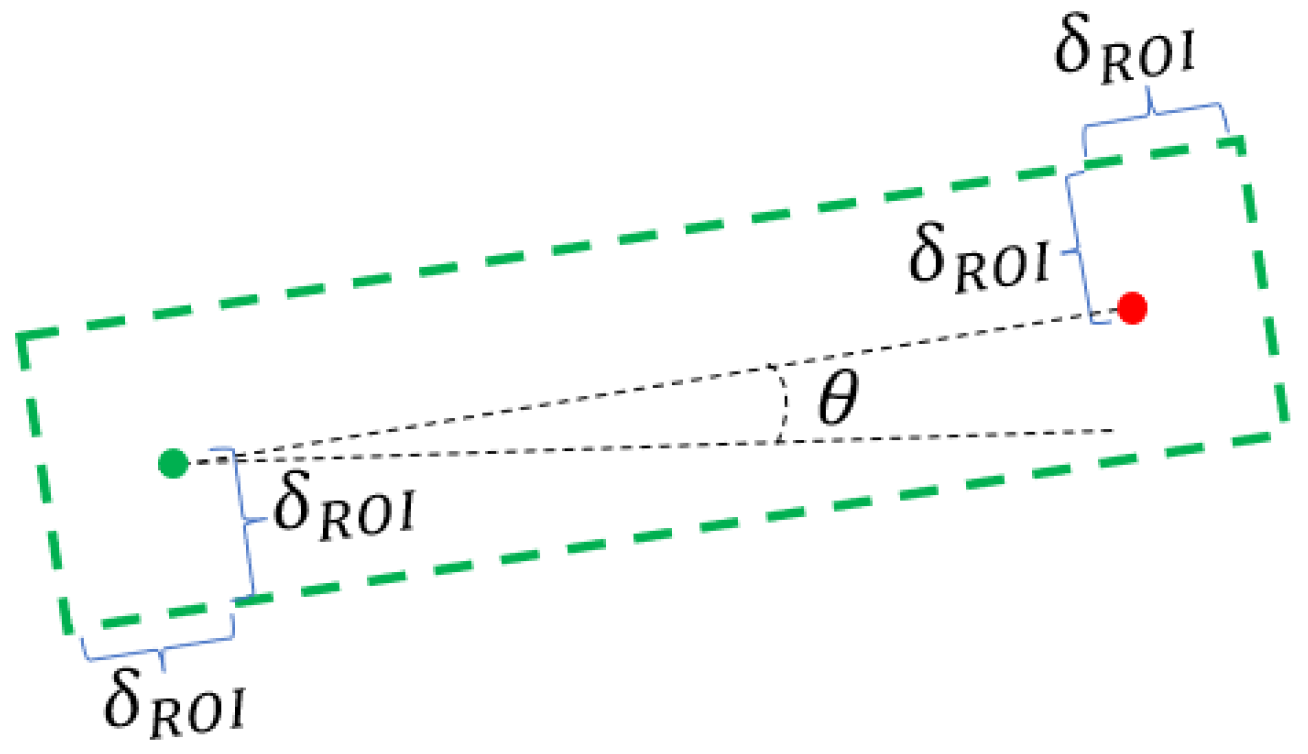
| Algorithm 3 Compute Visibility Graph ROI. |
| Inputs: Departure Point , Destination Point , ROI Inital Buffer , Keep-out Geofence Set Outputs: Keep-out Geofences in ROI Algorithm:
|
3.3. UAS Flight Planning in a Geofenced UTM Airspace
| Algorithm 4 Flight Planning With Geofencing. |
| Inputs: Departure Point , Destination Point , Cruise Altitude , Keep-out Geofence Boundaries , Aircraft Velocity , Time to Climb , Time to Descend , Number of Geofences , UAS Safety Buffer Outputs: Planned Flight Trajectory , Trajectory-wrapping 3-D Geofence Volumes Algorithm:
|
4. Environment Modeling
Map Data Processing
5. Simulation Setup
6. Simulation Results
7. Case Study with sUAS Route Deconfliction
8. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AAM | Advanced Air Mobility |
| AGL | Above Ground Level |
| ATC | Air Traffic Control |
| ATM | Air Traffic Management |
| BVLOS | Beyond Visual Line of Sight |
| Vehicle travel distance | |
| ERG | Explicit Reference Governor |
| GNC | Guidance Navigation and Control |
| IoT | Internet of Things |
| MDG | Multi-staged Durational Geofence |
| MSG | Multiple Staircase Geofence |
| NAS | National Airspace System |
| Allowable maximum number of vertices in a geofence | |
| OSM | OpenStreetMap |
| Downsampling percentage of the number of vertices in a geofence | |
| Power consumption over | |
| ROI | Region of Interest |
| RPS | Rotational Plane Sweep |
| SA | Situational Awareness |
| SBG | Single Big Geofence |
| SDG | Shrinking Durational Geofence |
| sUAS | small Unmanned Aerial System |
| TBOV | Transit Based Operational Volumnes |
| TWCA | Triangle Weight Characterization with Adjacency |
| Wait time until a geofence disappears | |
| UAS | Unmanned Aircraft System |
| UTM | UAS Traffic Management |
| UAM | Urban Air Mobility |
| UAS flight speed | |
| Safety buffer around a building | |
| Total safety buffer | |
| Safety buffer of initial ROI | |
| Safety buffer of vehicle |
References
- Joshi, D. Drone Technology Uses and Applications for Commercial, Industrial and Military Drones in 2020 and the Future. December 2019. Available online: https://www.businessinsider.in/tech/news/drone-technology-uses-and-applications-for-commercial-industrial-and-military-drones-in-2020-and-the-future/articleshow/72874958.cms (accessed on 3 January 2021).
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Estimation of traffic density from drone-based delivery in very low level urban airspace. J. Air Transp. Manag. 2020, 88, 101862. [Google Scholar] [CrossRef]
- Kopardekar, P.; Rios, J.; Prevot, T.; Johnson, M.; Jung, J.; Robinson, J.E. Unmanned aircraft system traffic management (UTM) concept of operations. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; pp. 1–16. [Google Scholar]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef] [Green Version]
- Samir Labib, N.; Danoy, G.; Musial, J.; Brust, M.R.; Bouvry, P. Internet of unmanned aerial vehicles—A multilayer low-altitude airspace model for distributed UAV traffic management. Sensors 2019, 19, 4779. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stevens, M.N.; Atkins, E.M. Generating Airspace Geofence Boundary Layers in Wind. J. Aerosp. Inf. Syst. 2020, 17, 113–124. [Google Scholar] [CrossRef]
- Fu, Q.; Liang, X.; Zhang, J.; Qi, D.; Zhang, X. A Geofence Algorithm for Autonomous Flight Unmanned Aircraft System. In Proceedings of the IEEE 2019 International Conference on Communications, Information System and Computer Engineering (CISCE), Haikou, China, 5–7 July 2019; pp. 65–69. [Google Scholar]
- Stevens, M.N.; Rastgoftar, H.; Atkins, E.M. Geofence boundary violation detection in 3D using triangle weight characterization with adjacency. J. Intell. Robot. Syst. 2019, 95, 239–250. [Google Scholar] [CrossRef]
- Zhu, G.; Wei, P. Low-altitude uas traffic coordination with dynamic geofencing. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 3453. [Google Scholar]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained control of UAVs in geofencing applications. In Proceedings of the IEEE 2018 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 217–222. [Google Scholar]
- Johnson, M.; Jung, J.; Rios, J.; Mercer, J.; Homola, J.; Prevot, T.; Mulfinger, D.; Kopardekar, P. Flight test evaluation of an unmanned aircraft system traffic management (UTM) concept for multiple beyond-visual-line-of-sight operations. In Proceedings of the 12th USA/Europe Air Traffic Management Research and Development Seminar (ATM2017), Seattle, WA, USA, 26–30 June 2017. [Google Scholar]
- Dill, E.T.; Young, S.D.; Hayhurst, K.J. SAFEGUARD: An assured safety net technology for UAS. In Proceedings of the 2016 IEEE/AIAA 35th Digital Avionics Systems Conference (DASC), Sacramento, CA, USA, 25–29 September 2016; pp. 1–10. [Google Scholar]
- Kim, J.T.; Mathur, A.; Liberko, N.; Atkins, E. Volumization and Inverse Volumization for Low-Altitude Airspace Geofencing. In Proceedings of the AIAA AVIATION 2021 FORUM, Virtual, 2–6 August 2021; p. 2383. [Google Scholar]
- Prevot, T.; Rios, J.; Kopardekar, P.; Robinson, J.E., III; Johnson, M.; Jung, J. UAS traffic management (UTM) concept of operations to safely enable low altitude flight operations. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Sesar, J. European Drones Outlook Study Unlocking the Value for Europe; SESAR: Brussels, Belgium, 2016. [Google Scholar]
- Sedov, L.; Polishchuk, V. Centralized and distributed UTM in layered airspace. In Proceedings of the 8th International Conference on Research in Air Transportation, Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- Jiang, T.; Geller, J.; Ni, D.; Collura, J. Unmanned Aircraft System traffic management: Concept of operation and system architecture. Int. J. Transp. Sci. Technol. 2016, 5, 123–135. [Google Scholar] [CrossRef]
- Cho, J.; Yoon, Y. How to assess the capacity of urban airspace: A topological approach using keep-in and keep-out geofence. Transp. Res. Part C Emerg. Technol. 2018, 92, 137–149. [Google Scholar] [CrossRef]
- Dasu, T.; Kanza, Y.; Srivastava, D. Geofences in the sky: Herding drones with blockchains and 5G. In Proceedings of the 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 6–9 November 2018; pp. 73–76. [Google Scholar]
- Yoon, H.; Chou, Y.; Chen, X.; Frew, E.; Sankaranarayanan, S. Predictive runtime monitoring for linear stochastic systems and applications to geofence enforcement for uavs. In International Conference on Runtime Verification; Springer: Cham, Switzerland, 2019; pp. 349–367. [Google Scholar]
- Stevens, M.N.; Rastgoftar, H.; Atkins, E.M. Specification and evaluation of geofence boundary violation detection algorithms. In Proceedings of the IEEE 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1588–1596. [Google Scholar]
- Endsley, M.R. Design and evaluation for situation awareness enhancement. In Proceedings of the Human Factors Society Annual Meeting, Anaheim, CA, USA, 24–28 October 1988; Sage Publications: Los Angeles, CA, USA, 1988; Volume 32, pp. 97–101. [Google Scholar]
- Endsley, M.R.; Rodgers, M.D. Situation awareness information requirements analysis for en route air traffic control. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications: Los Angeles, CA, USA, 1994; Volume 38, pp. 71–75. [Google Scholar]
- Verma, S.A.; Monheim, S.C.; Moolchandani, K.A.; Pradeep, P.; Cheng, A.W.; Thipphavong, D.P.; Dulchinos, V.L.; Arneson, H.; Lauderdale, T.A.; Bosson, C.S.; et al. Lessons learned: Using UTM paradigm for urban air mobility operations. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–16 October 2020; pp. 1–10. [Google Scholar]
- Stevens, M.N.; Atkins, E.M. Multi-mode guidance for an independent multicopter geofencing system. In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016; p. 3150. [Google Scholar]
- Weiler, K. Polygon comparison using a graph representation. In Proceedings of the 7th Annual Conference on Computer Graphics and Interactive Techniques, Seattle, WA, USA, 14–18 July 1980; pp. 10–18. [Google Scholar]
- Sklansky, J. Finding the convex hull of a simple polygon. Pattern Recognit. Lett. 1982, 1, 79–83. [Google Scholar] [CrossRef]
- Haines, E. Point in Polygon Strategies. Graph. Gems 1994, 4, 24–46. [Google Scholar]
- Hormann, K.; Agathos, A. The point in polygon problem for arbitrary polygons. Comput. Geom. 2001, 20, 131–144. [Google Scholar] [CrossRef] [Green Version]
- Duchoň, F.; Babinec, A.; Kajan, M.; Beňo, P.; Florek, M.; Fico, T.; Jurišica, L. Path planning with modified a star algorithm for a mobile robot. Procedia Eng. 2014, 96, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Stentz, A. Optimal and efficient path planning for partially known environments. In Intelligent Unmanned Ground Vehicles; Springer: Boston, MA, USA, 1997; pp. 203–220. [Google Scholar]
- De Berg, M.; Van Kreveld, M.; Overmars, M.; Schwarzkopf, O. Computational geometry. In Computational Geometry; Springer: Berlin/Heidelberg, Germany, 1997; pp. 1–17. [Google Scholar]
- Latombe, J.C. Robot Motion Planning; Springer Science & Business Media: New York, NY, USA, 2012; Volume 124. [Google Scholar]
- Lingelbach, F. Path planning using probabilistic cell decomposition. In ICRA’04, Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; IEEE: New York, NY, USA, 2004; Volume 1, pp. 467–472. [Google Scholar]
- Hwang, Y.K.; Ahuja, N. A potential field approach to path planning. IEEE Trans. Robot. Autom. 1992, 8, 23–32. [Google Scholar] [CrossRef] [Green Version]
- Burns, B.; Brock, O. Sampling-based motion planning using predictive models. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 3120–3125. [Google Scholar]
- Stevens, M.; Atkins, E. Geofence Definition and Deconfliction for UAS Traffic Management. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5880–5889. [Google Scholar] [CrossRef]
- Semechko, A. Decimate 2D Contours/Polygons. 2018. Available online: https://github.com/AntonSemechko/DecimatePoly (accessed on 3 January 2021).
- Bondy, J.A.; Murty, U.S.R. Graph Theory with Applications; Macmillan: London, UK, 1976; Volume 290. [Google Scholar]
- Huang, H.P.; Chung, S.Y. Dynamic visibility graph for path planning. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2813–2818. [Google Scholar]
- Haklay, M.; Weber, P. Openstreetmap: User-generated street maps. IEEE Pervasive Comput. 2008, 7, 12–18. [Google Scholar] [CrossRef] [Green Version]
- Ochoa, C.A.; Atkins, E.M. Urban Metric Maps for Small Unmanned Aircraft Systems Motion Planning. arXiv 2021, arXiv:2102.07218. [Google Scholar] [CrossRef]
- Kumar, M. World geodetic system 1984: A modern and accurate global reference frame. Mar. Geod. 1988, 12, 117–126. [Google Scholar] [CrossRef]
- Mathur, A.; Atkins, E.M. Design, Modeling and Hybrid Control of a QuadPlane. In Proceedings of the AIAA Scitech 2021 Forum, Virtual, 11–22 January 2021; p. 374. [Google Scholar]
- Hershberger, J.; Suri, S. An optimal algorithm for Euclidean shortest paths in the plane. SIAM J. Comput. 1999, 28, 2215–2256. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 5 (m/s) | 2 (m) | 5 (m) | 5 | 50 (m) |
| Climb | Descent | Forward Flight |
|---|---|---|
| 312 (J/s) | 300 (J/s) | 328 (J/s) |
| } | } |
|---|---|
| 698 out of 712 cases | 702 out of 712 cases |
| 1391 (m) | 91259 (J) | 189 (m) | 3003 (m) |
| 1595 (m) | 606 (m) | 94,338 (J) | 39,609 (J) | 254 (m) | 3349 (m) |
| 2303 (m) | 820 (m) | 149,084 (J) | 53,449 (J) | 479 (m) | 4464 (m) |
| 2796 (m) | 788 (m) | 179,363 (J) | 51,502 (J) | 1142 (m) | 4836 (m) |
| 115 (%) | 103 (%) | 166 (%) | 163 (%) |
| [584,085; 4,508,093; 0] | [584,248; 4,506,598; 0] | 30 | 50 | |
| [583,600; 4,507,000; 0] | [584,460; 4,507,660; 0] | 20 | 50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Atkins, E. Airspace Geofencing and Flight Planning for Low-Altitude, Urban, Small Unmanned Aircraft Systems. Appl. Sci. 2022, 12, 576. https://doi.org/10.3390/app12020576
Kim J, Atkins E. Airspace Geofencing and Flight Planning for Low-Altitude, Urban, Small Unmanned Aircraft Systems. Applied Sciences. 2022; 12(2):576. https://doi.org/10.3390/app12020576
Chicago/Turabian StyleKim, Joseph, and Ella Atkins. 2022. "Airspace Geofencing and Flight Planning for Low-Altitude, Urban, Small Unmanned Aircraft Systems" Applied Sciences 12, no. 2: 576. https://doi.org/10.3390/app12020576
APA StyleKim, J., & Atkins, E. (2022). Airspace Geofencing and Flight Planning for Low-Altitude, Urban, Small Unmanned Aircraft Systems. Applied Sciences, 12(2), 576. https://doi.org/10.3390/app12020576