

Research Status and Development Trend of Underground Intelligent Load-Haul-Dump Vehicle—A Comprehensive Review
Abstract
1. Introduction
2. The Literature Sources and Statistical Analysis
2.1. Data Source
2.2. Statistical Method and Result
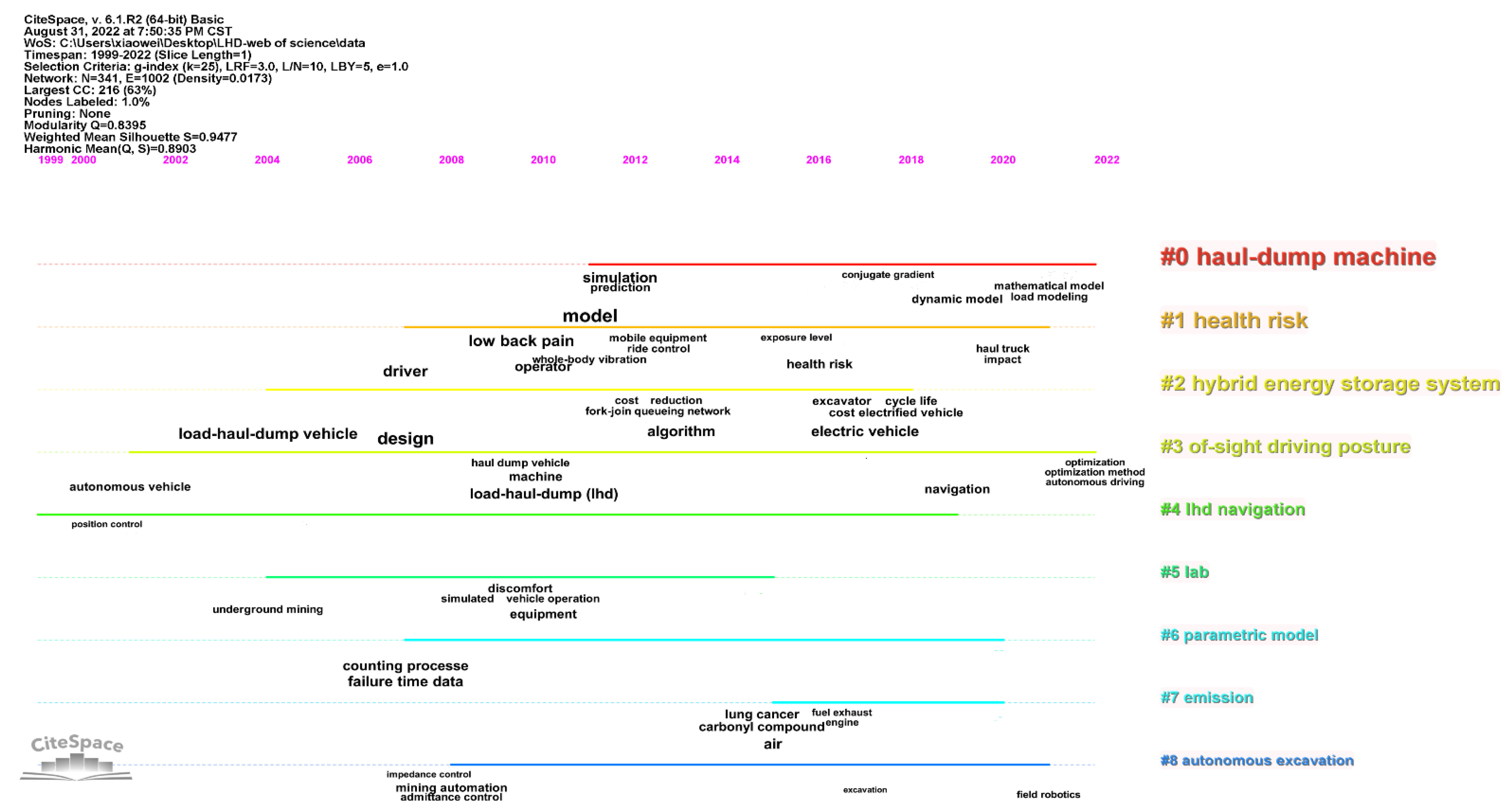
- (1)
- As can be seen from Figure 1, the research in foreign countries about intelligent LHD could be traced back early to the 1990s and was mainly focused in 2007–2022. The keyword co-occurrence was not focused, shown as many scattered words with similar font sizes. If anything was summed up, the research topics about simulation prediction, dynamic model, algorithm, navigation and path tracking were relatively popular.
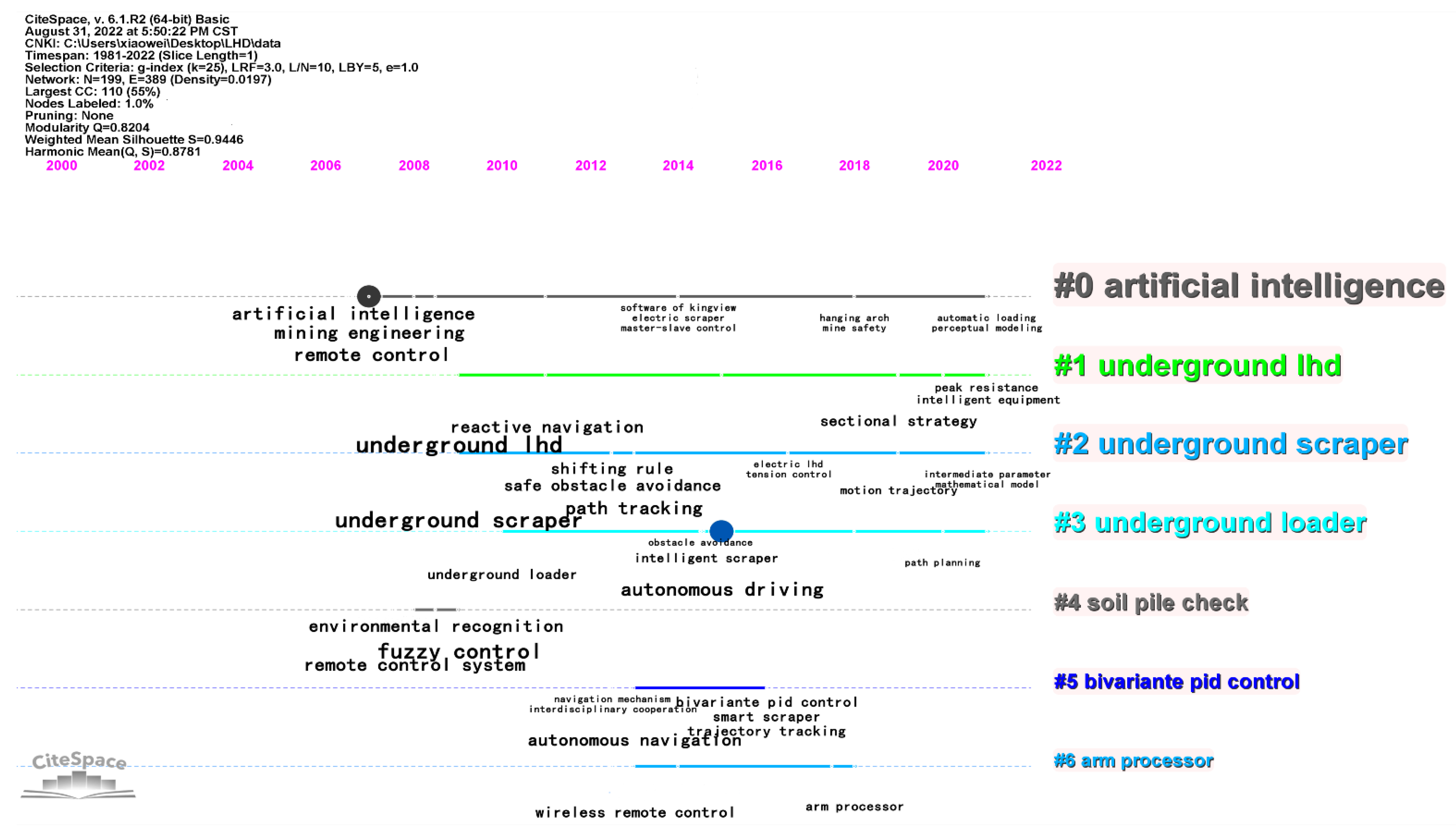
- (2)
- From Figure 2, the research about the intelligent LHD in domestic China was much later than that in foreign countries, beginning from about 2007 and mainly focused in 2009–2021, with hotspots mainly focused on key technologies, such as fuzzy control, remote control, autonomous driving, path tracking, environmental recognition, autonomous navigation and safe obstacle avoidance.
- (3)
- No matter whether at home or abroad, the research on intelligent LHD was scattered and not extensive. However, it is an undoubtedly important machine and would be one of the hotspots for the intelligent mining industry.
3. Development and Application Status of Intelligent LHD
4. Autonomous Shovel Technology
4.1. Rock Pile Identification and Modeling Technology
4.1.1. Image Sensor-Based Rock Pile Identification
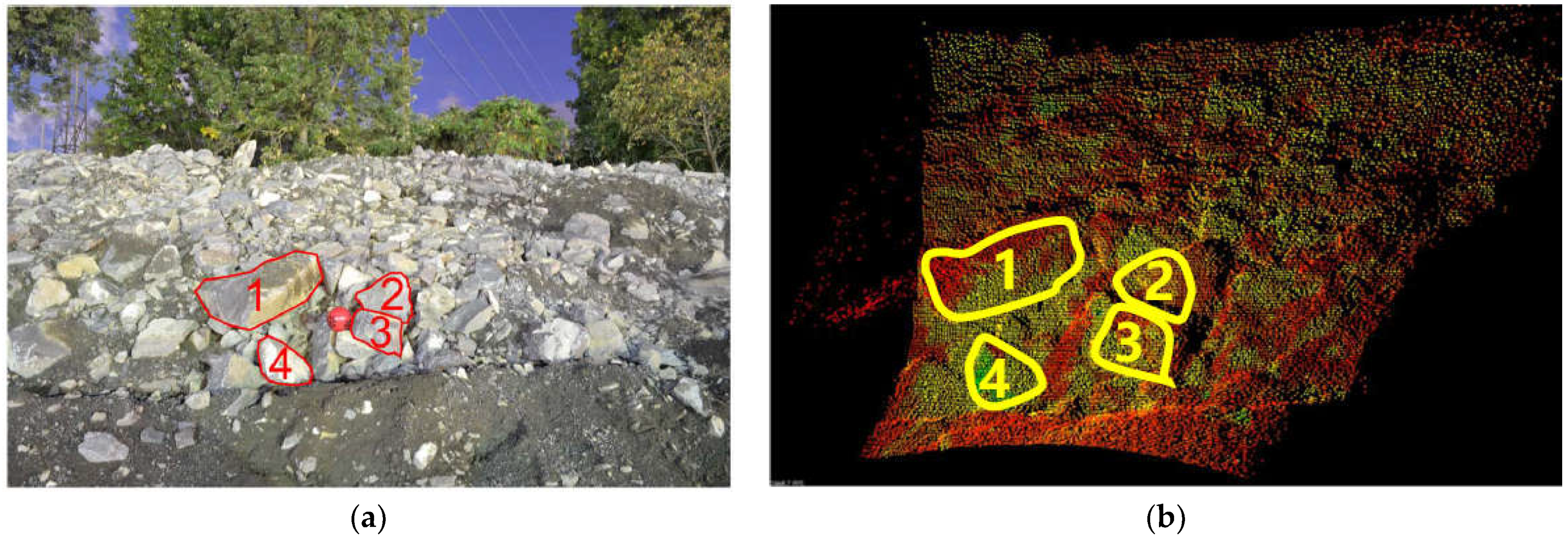
4.1.2. Rock Pile Identification Based on Distance Sensor
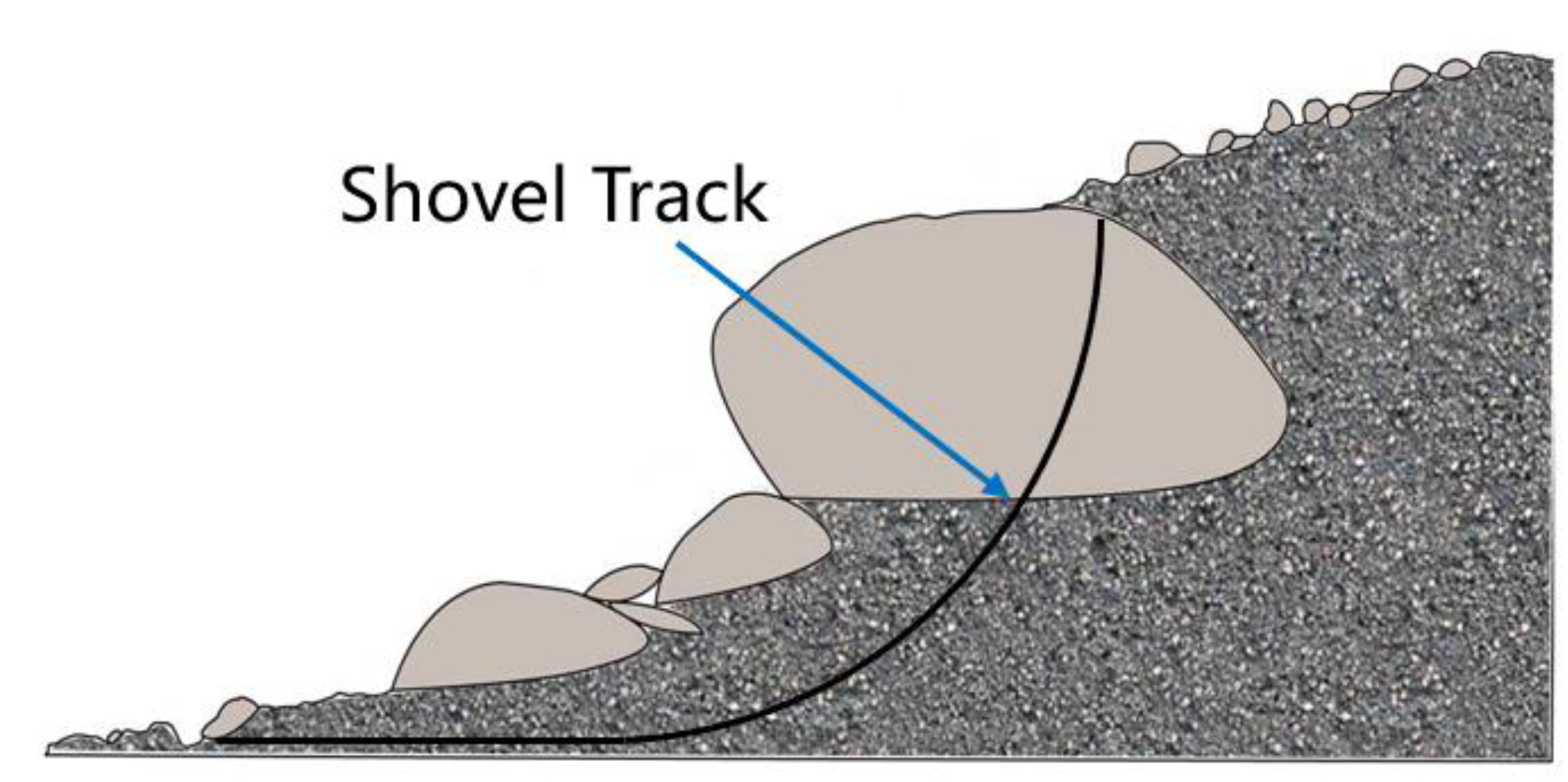
4.2. Shovel Trajectory Planning
4.2.1. Resistance Force Determined Trajectory Planning Method
4.2.2. Self-Learning-Guided Trajectory Planning Methods
5. Autonomous Navigation Technology
5.1. Positioning Technology
- (1)
- Dead reckoning method
- (2)
- Inertial navigation technology
- (3)
- UWB Positioning
- (4)
- Visual Positioning
- (5)
- Information Fusion and Location Technology
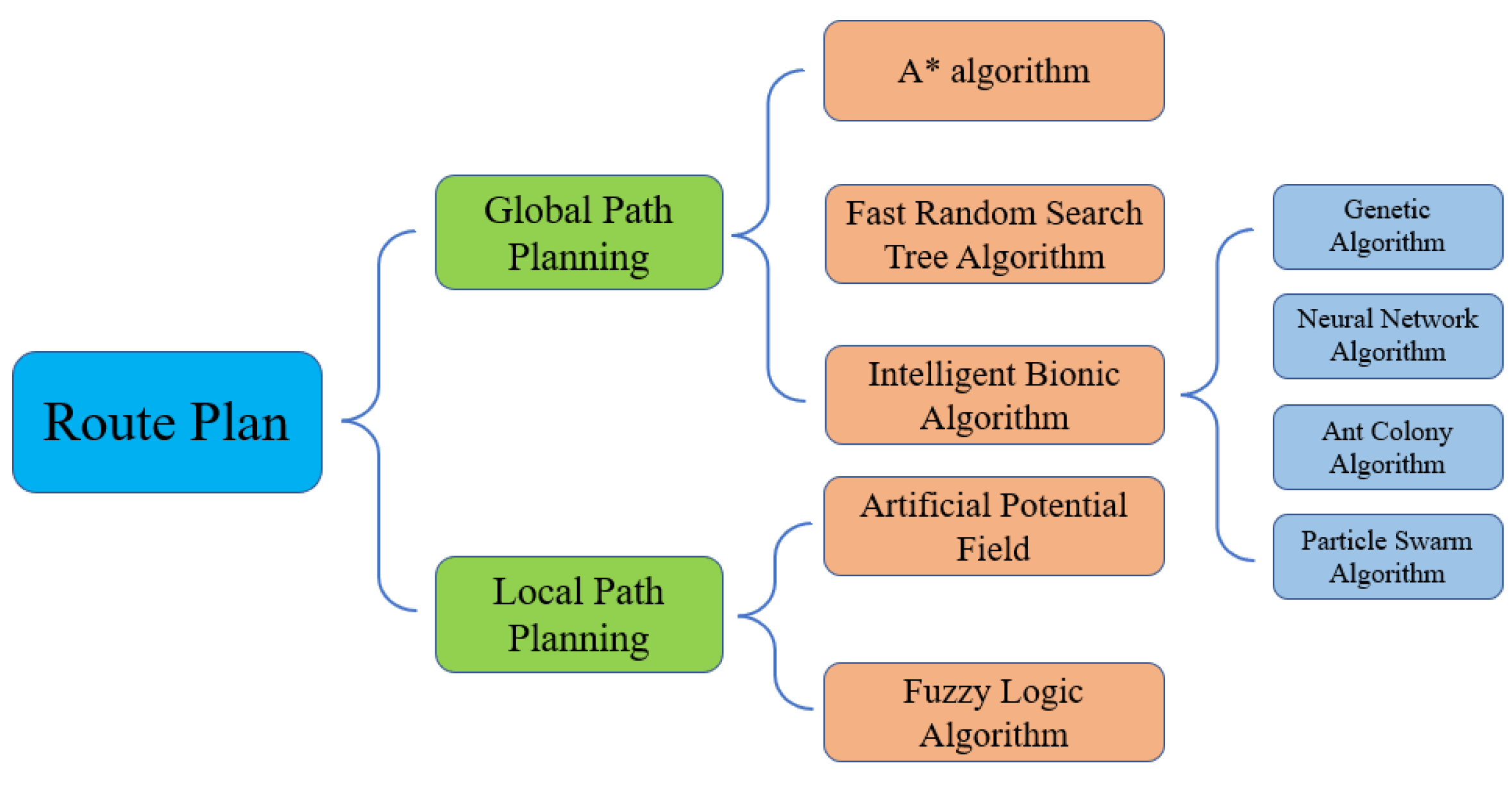
5.2. Path Planning
5.2.1. Global Path Planning
- (1)
- A* algorithmThe A* algorithm is a heuristic search algorithm, which guides and determines the search direction, mainly through an evaluation function [86]. As long as the optimal distance from the node to the target point is determined, an optimal path must be obtained [87]. However, it is necessary to conduct a traversal search around the nodes on the path to optimize the path and save cost, resulting in large calculation amount, poor real-time performance and long operation time. Moreover, as the number of nodes increases, the algorithm search efficiency decreases [12]. In order to improve the efficiency for the optimal path searching and reduce the searching time, Zheng et al. [88] used a jumping point search method based on the A* algorithm and introduced the angle evaluation function into the cost function in the A* algorithm. The number of inflection points on the path obtained by the combined method was minimized compared with that by the original A* algorithm and quick optimal path search was achieved with speed faster than that of the traditional A* algorithm. Ma F. et al. [89] proposed a navigation path planning method for articulating underground LHD based on the improved A* algorithm, through introducing the collision treat cost into the evaluation function, in order to avoid the LHD from scraping the narrow roadway walls. According to the specific requirements of the path planning for unmanned underground LHD, Qi Yulong et al. [90] proposed an improved A* algorithm modeled with extended nodes and introduced the collision threat cost into the evaluation function to avoid the scraper from collision onto the tunnel walls. Simulation tests were also conducted and it was verified that the modified A* algorithm method could enhance the search process, improve the safety of the scraper and prevent collisions.
- (2)
- Fast Random Search Tree AlgorithmThe fast search random tree algorithm is an incremental search algorithm based on probability sampled data. The basic idea is to take the starting point of the automatic LHD as the root node of the random tree, then find a tree node closest to the root one and expand a step length. If collision occurs, the node is discarded and a new expanding direction is set randomly from the current tree node to find the next tree node. The cycle is repeated until a new direction is found. The advantages of this method include high search efficiency, strong search ability, wide search range and no specific requirements for the scene. However, it faces the following shortcomings: nonautonomous search, low utilization rate for the evenly allocated random sampling points, irregular and time-consuming planned path and easily falling into dead zones and causing local minima for searches in complex maps [12,86].
- (3)
- Bioinspired Intelligent AlgorithmCompared with traditional algorithms, the advantages of bioinspired intelligent algorithms are mainly reflected in the ability to solve multi-objective optimization problems effectively, anti-interference strongly, obtain the global optimal value quickly without limitation of local optimal value and the initial value, etc. [91]. It can be mainly divided into genetic algorithm, particle swarm algorithm, ant colony algorithm, etc. [85].
- Genetic AlgorithmGenetic algorithm is an intelligent optimized algorithm based on biological genetic evolution theory in nature. It is the mainstream of robot path planning research and has great research prospects [92]. This algorithm shows good compatibility with other intelligent algorithms, attributed to easy improvement and excellent iterative evolution. The method is flexible in search with the generation of initial population and introduction of crossover and mutation operators and also capable for global optimal path determination. However, at the same time, the calculation speed is slowed down with relative low searching efficiency. In addition, too many inflection points in the path result in the generation of some meaningless populations during iterative evolution of the algorithm, which slows down the subsequent calculation process. Thus, this method is not suitable for online path planning.
- Neural Network AlgorithmNeural networks are intelligent systems composed of many simple but highly interconnected processing elements that transmit information through dynamic responses to external inputs [93]. Neural networks have the characteristics of high fault tolerance, distributed representation, extensive parallelism and generalization. Afifi et al. [94] proposed a multi-level system built with a deep reinforcement policy gradient algorithm, which can collaboratively plan multi-vehicle collision-free travel paths through motion planning. Luviano et al. [95] proposed a multi-agent reinforcement learning algorithm to solve the problem that unmanned vehicles learn slowly or even fail to learn in a completely unknown environment. By ensuring the corresponding reward methods and completing the training process, the optimal path can be found. Pang Ke et al. [96] reported a route search strategy for unmanned vehicles that integrates the reinforcement learning algorithm and the deep learning algorithm. It determines the driving path by driving comfort constraints together with the function about reward and punishment of obstacle information and traffic regulations.
- Ant Colony AlgorithmThe ant colony algorithm has good comprehensive performance and strong global optimization ability, which can complete the scraper path planning in complex mining environments, but it is easy to reach a stalemate of only local optimal. Long Zhizhuo et al. [97] proposed global path planning for underground intelligent LHD through an improved ant colony algorithm to solve the problems of slow convergence speed and easy stagnation due to local optimum in the traditional ant colony algorithm.
- Particle Swarm AlgorithmParticle swarm optimization is also a probabilistic global path planning algorithm. Because of its multi-possibility of the iteration, it is much more possible to cover the global map during the path searching process with this algorithm. Correspondingly, the global optimal solution is easier to be obtained [98]. The particles adapt well to complex situations through the interconnection of information. Hence, this method is highly adaptable, even in a high-dimensional environment.
5.2.2. Local Path Planning
- (1)
- Artificial Potential Field Method
- (2)
- Fuzzy Logic Algorithm
6. Real-Time Monitoring and Fault Diagnosis Technology
6.1. Real-Time Monitoring
6.2. Failure Prediction and Diagnosis
- (1)
- The data for the underground LHD real-time status are not fully utilized. Excavation on the collected data is not deep enough for fault prediction and diagnosis.
- (2)
- Fault prediction and diagnosis are mainly targeted on the engine and hydraulic system of the scraper and few studies have been conducted on other systems.
- (3)
- Even deep learning has attracted the attention of many researchers as a new method in the field of intelligent fault diagnosis, though few studies have been conducted on fault diagnosis for LHD to date.
7. Summary
- (1)
- For better mile pile perception in the future, how to complement and optimize the information of multi sensors in a multi-level and multi-dimensional manner, improve the data processing speed and establish the three-dimensional model would be the critical scientific issues, as a single sensor perceives poorly for the heaps in underground roadways that are dark, dusty and face field interference.
- (2)
- In the research for bucket shovel loading trajectory plan and optimization, the planning method based on reinforcement learning will be one of the mainstream directions under the background of artificial intelligence, big data and cloud computing in the future, while how to complete the shoveling most efficiently with the least energy consumption is the key goal for this method.
- (3)
- As for autonomous navigation technology, it is one of the key researched technologies for underground intelligent LHD, both at home and abroad, and it directly determines whether the transport of the ore will succeed or not. Thus, the research on multi-sensing information fusion technology and the positioning accuracy improvement and speeding should be focused on. The combination of the global path planning with the local path planning methods to plan a travel path, which is without collision and has shortest time consumption, will be the mainstream direction in the future.
- (4)
- With the introduction of digital twin technology into the intelligent mine construction field, synchronous mapping and real-time interaction between physical equipment and virtual equipment can be achieved. By building digital twin models for the intelligent LHDs in the coming future, remote monitoring, fault diagnosis, control optimization and health prediction for the physical machine are expected to be attained through modeling on the extracted feature from the faults and the corresponding process and analyzing the interference factors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, A.; Wang, Y.; Zhang, M. New development and prospect of key technology in underground mining of metal mines. Met. Mine 2021, 50, 1. [Google Scholar]
- Gustafson, A.; Schunnesson, H. The influence of the operating environment on manual and automated load-haul-dump machines: A fault tree analysis. Int. J. Min. Reclam. Environ. 2013, 27, 75–87. [Google Scholar] [CrossRef]
- Gu, Q.; Li, L.; Bai, G. Longitudinal and Lateral Trajectory Planning for the Typical Duty Cycle of Autonomous Load Haul Dump. IEEE Access 2019, 7, 126679–126695. [Google Scholar] [CrossRef]
- Liu, J.; Wang, B.; Sun, Y. Application of intelligent remote control technology for underground mine LHD. Mod. Min. 2020, 36, 134–136,141. [Google Scholar]
- Jiang, D.; Wang, L. Current situation and development trend of autonomous shovel loading technology for underground LHD. Gold Sci. Technol. 2021, 29, 35–41. [Google Scholar]
- Gu, D. The development tendency of mining science and technology of underground metal mine. Gold 2004, 25, 18–22. [Google Scholar]
- Eger, T.; Salmoni, A.; Whissell, R. Factors influencing load-haul-dump operator line of sight in underground mining. Appl. Ergon. 2004, 35, 93–103. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, J.; Yu, T. Application of unmanned intelligent equipment in Dayingezhuang gold mine. Nonferr. Metall. Equip. 2021, 35, 15–20. [Google Scholar]
- Liang, X.; Wang, H.; Chen, X. The automatic mining system of the LHD is filling upwards in layers application research of stope. Nonferr. Metall. Equip. 2021, 35, 68–75. [Google Scholar]
- Li, J.; Zhan, K. Intelligent Mining Technology for an Underground Metal Mine Based on Unmanned Equipment. Engineering 2018, 4, 181–203. [Google Scholar] [CrossRef]
- Tan, Z.; Wu, Q. Analysis on the theory and key technologies of smart mines. China Coal 2019, 45, 30–40. [Google Scholar]
- Shadrin, S.S.; Varlamov, V.O.; Ivanov, A.M. Experimental Autonomous Road Vehicle with Logical Artificial Intelligence. J. Adv. Transp. 2017, 2017, 2492765. [Google Scholar] [CrossRef]
- Wang, Z.Q.; Hu, X.G.; Li, X.X.; Du, Z.Q. Overview of global path planning algorithms for mobile robots. Comput. Sci. 2021, 48, 19–29. [Google Scholar]
- Seo, Y.; Shin, K. Hierarchical convolutional neural networks for fashion image classification. Expert Syst. Appl. 2019, 116, 328–339. [Google Scholar] [CrossRef]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach; Pearson Education Limited: Upper Saddle River, NJ, USA, 2003. [Google Scholar]
- Dua, M.; Aggarwal, R.K.; Biswas, M. Discriminatively trained continuous Hindi speech recognition system using interpolated recurrent neural network language modeling. Neural Comput. Appl. 2019, 31, 6747–6755. [Google Scholar] [CrossRef]
- Li, B.T.; Pi, D.C. Learning deep neural networks for node classification. Expert Syst. Appl. 2019, 137, 324–334. [Google Scholar] [CrossRef]
- Gomaa, A.; Minematsu, T.; Abdelwahab, M.M. Faster CNN-based vehicle detection and counting strategy for fixed camera scenes. Multimed. Tools Appl. 2022, 81, 25443–25471. [Google Scholar] [CrossRef]
- Gao, M. Talking about the Development of Underground Loader and Underground Vehicle Automation Technology(one). Mod. Min. 2009, 1, 1–6. [Google Scholar]
- Gao, M. Talking about the Development of Underground Loader and Underground Vehicle Automation Technology(three). Mod. Min. 2010, 2, 5–10. [Google Scholar]
- Yang, Q.; Zhao, X.; Wu, G.; Cen, Y. Automatic mining technology of LHD and its application prospect. Min. Technol. 2016, 16, 21–25. [Google Scholar]
- Available online: https://news.d1cm.com/2018092099180.shtml (accessed on 25 July 2022).
- Noakes, F. LHD automation DAS the way to go. Aust. Ming 2003, 8, 38–39. [Google Scholar]
- Yu, R.; Liu, C.; Zhu, R. Mine Information Model-Development Direction of Mining Informatization. China Mine Eng. 2018, 47, 1–3+13. [Google Scholar]
- Zhao, X.; Wang, Y.; Guo, R. Application of automatic LHD in mining of gently inclined medium thick orebody. Copp. Eng. 2017, 1, 39–43, +95. [Google Scholar]
- Scheding, S.; Dissanayake, G.; Nebot, E.; Durrant-Whyte, H. Slip modelling and aided inertial navigation of an LHD. In Proceedings of the IEEE International Conference on Robotics & Automation, Albuquerque, NM, USA, 25 April 1997; Volume 3, pp. 1904–1907. [Google Scholar]
- Duff, E.S.; Roberts, J.M.; Corke, P.I. Automation of an underground mining vehicle using reactive navigation and opportunistic localization. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; pp. 3775–3780. [Google Scholar]
- Zhai, X. Research on the Stability of Underground Escort Machine Based on Virtual Prototype Technology; Beijing University of Posts and Telecommunications: Beijing, China, 2015. [Google Scholar]
- Madhavan, R.; Dissanayake, G.; Durrant-Whyte, H.F. Autonomous underground navigation of an LHD using a combined ICP-EKF approach. In Proceedings of the IEEE International Conference on Robotics & Automation, Leuven, Belgium, 20 May 1998; Volume 4, pp. 3703–3708. [Google Scholar]
- Paraszczak, J.; Gustafson, A.; Schunnesson, H. Technical and operational aspects of autonomous LHD application in metal mines. Int. J. Min. Reclam. Environ. 2015, 19, 391–403. [Google Scholar]
- Li, J. Research on Automonous Control of Driving and Dumoing for Underground Load-Haul-Dump. Ph.D. Thesis, University of Science and Technology Beijing, Beijing, China, 2016. [Google Scholar]
- Guo, X.; Zhan, K.; Gu, H. Research on underground navigation of unmanned scraper. Nonferr. Met. 2009, 61, 143–147. [Google Scholar]
- Li, J.; Zhan, K.; Zhou, J. Development of laser measurement system based on EPC8900 and its application in underground intelligent scraper. Comput. Technol. Autom. 2012, 31, 83–85. [Google Scholar]
- Su, W. Research on Precise Positioning Technology of Underground Unmanned Scrapers; University of Science and Technology Beijing: Beijing, China, 2010. [Google Scholar]
- Yang, C.; Chen, S.; Liu, L. Application of Reactive Navigation in Underground Autonomous Driving Scrapers. Chin. J. Coal 2011, 36, 1943–1948. [Google Scholar]
- Shi, F.; Gu, H.; Zhan, K. Study on multi-mode autonomous driving control method for underground loader. Min. Metall. 2015, 24, 61–66. [Google Scholar]
- Li, J. Study on Key Technique of Light Source in Machine Vision; Tianjin University of Technology: Tianjin, China, 2007. [Google Scholar]
- Wang, H.; Xu, Y.; Cai, Y. A review of multi-target detection technology for smart cars based on multi-sensor fusion. J. Automot. Saf. Energy 2021, 12, 440–455. [Google Scholar]
- Wang, S.; Liu, Q.; Wang, C. Design of 3D reconstruction system for outdoor scenes based on binocular stereo cameras. Comput. Meas. Control 2017, 25, 137–140+145. [Google Scholar]
- Petty, M.K.; Billingsley, J.; Tran-Cong, T. Autonomous LHD loading. In Proceedings of the Conference on Mechatronics & Machine Vision in Practice, Toowoomba, QLD, Australia, 23–25 September 1997. [Google Scholar]
- Whitehorn, M.; Vincent, T.; Debrunner, C.H. Stereo vision in LHD automation. IEEE Trans. Ind. Appl. 2001, 39, 21–29. [Google Scholar] [CrossRef]
- Ma, L. Research on Ground 3D Laser Scanning Measurement Technology. Master’s Thesis, Wuhan University, Wuhan, China, 2005. [Google Scholar]
- Stentz, A.; Bares, J.; Singh, S. A robotic excavator for autonomous truck loading. Auton. Robot. 1999, 7, 175–186. [Google Scholar] [CrossRef]
- Cheung, W.K.W. Inferring Surface Structure of Rock Piles from Range Images. Master’s Thesis, McGill University, Montréal, QC, Canada, 1992. [Google Scholar]
- Bedair, A. Digital Image Analysis of Rock Fragmentation from Blasting. Ph.D. Thesis, McGill University, Montréal, QC, Canada, 1996. [Google Scholar]
- Thurley, M.J. Three Dimensional Data Analysis for the Separation and Sizing of Rock Piles in Mining. Ph.D. Thesis, Monash University, Clayton, VIC, Australia, 2002. [Google Scholar]
- Mckinnon, C.; Marshall, J.A. Automatic Identification of Large Fragments in a Pile of Broken Rock Using a Time-of-Flight Camera. IEEE Trans. Autom. Sci. Eng. 2016, 11, 935–942. [Google Scholar] [CrossRef]
- Sun, Q. Research on the Control of Autonomous Driving of Intelligent LHD. Master’s Thesis, University of Jinan, Jinan, China, 2020. [Google Scholar]
- Meng, Y.; Fang, H.; Liang, G.; Gu, Q.; Liu, L. Bucket Trajectory Optimization under the Automatic Scooping of LHD. Energies 2019, 12, 3919. [Google Scholar] [CrossRef]
- Dadhich, S.; Bodin, U.; Andersson, U. Key challenges in automation of earth-moving machines. Autom. Constr. 2016, 68, 212–222. [Google Scholar] [CrossRef]
- Mikhirev, P.A. Theory of the working cycle of automated rock-loading machines of periodic action. Sov. Min. 1983, 19, 515–522. [Google Scholar] [CrossRef]
- Obermayr, M.; Dressler, K.; Vrettos, C. Prediction of draft forces in cohesionless soil with the Discrete Element Method. J. Terramech. 2011, 48, 347–358. [Google Scholar] [CrossRef]
- Coetzee, C.J.; Els, D. The numerical modelling of excavator bucket filling using DEM. J. Terramech. 2009, 46, 217–227. [Google Scholar] [CrossRef]
- Coetzee, C.J. Discrete and continuum modelling of soil cutting. Comput. Part. Mech. 2014, 1, 409–423. [Google Scholar] [CrossRef][Green Version]
- Lin, G.; Li, A.; Xiao, B.; Ren, J. Simulation of Excavation Resistance of Mechanical Single Bucket Excavator. Min. Process. Equip. 2014, 4, 39–43. [Google Scholar]
- Wang, X. Optimization Design Methods of the Excavating Trajectory for Intelligent Electric Shovels. Ph.D. Thesis, Dalian University of Technology, Dalian, China, 2019. [Google Scholar]
- Hemami, A.; Hassani, F. Simulation Study of a Control Procedure for Automated Loading of Bulk Media. In Proceedings of the 22nd International Symposium on Automation and Robotics in Construction, Ferrara, Italy, 11–14 September 2005. [Google Scholar]
- Richardson-Little, W.; Damaren, C.J. Position accommodation and compliance control for robotic excavation. In Proceedings of the IEEE Conference on Control Applications, Toronto, ON, Canada, 28–31 August 2005; pp. 1194–1199. [Google Scholar]
- Marshall, J.A.; Murphy, P.F.; Daneshmend, L.K. Toward antonomous excavation offragmented rock: Full-scale experiments. IEEE Trans. Onautomation Sci. Eng. 2008, 5, 562–566. [Google Scholar] [CrossRef]
- Yin, C.; Hu, T. Study on the optimal track of automatic shoveling of undergroud LHD. Met. Mine 2009, 3, 146–148+177. [Google Scholar]
- Shi, X.; Lever, P.; Wang, F.Y. Experimental Robotic Excavation with Fuzzy Logic and Neural Networks. In Proceedings of the IEEE International Conference on Robotics and AutomationAutomation, Minneapolis, MN, USA, 22–28 April 1996. [Google Scholar]
- Lever, P.J. An automated digging control for a wheel loader. Robotica 2001, 19, 497–511. [Google Scholar] [CrossRef]
- Maeda, G.J.; Rye, D.C.; Singh, S.P.N. Iterative Autonomous Excavation. In Field and Service Robotics—Results of the 8th International Conference; Springer: Berlin/Heidelberg, Germany, 2014; pp. 369–382. [Google Scholar]
- Dadhich, S.; Bodin, U.; Sandin, F. Machine learning approach to automatic bucket loading. In Proceedings of the Mediterranean Conference on Control & Automation, Athens, Greece, 21–24 June 2016; pp. 1260–1265. [Google Scholar]
- Fernando, H.; Marshall, J.A.; Larsson, J. Iterative Learning-Based Admittance Control for Autonomous Excavation. J. Intell. Robot. Syst. 2019, 96, 493–500. [Google Scholar] [CrossRef]
- Yang, Y. Development and application of driverless technique of LHD in underground mine. Mod. Min. 2018, 34, 73–77. [Google Scholar]
- Shi, X.; Li, H.; Shi, F.; Gao, Z. Fusion underground positioning system of UWB and laser range technology for underground LHD. Nonferr. Met. 2020, 72, 81–83. [Google Scholar]
- Dragt, B.J.; Camisani-Calzolari, F.R.; Craig, I.R. An overview of the automation of load-haul-dump vehicles in an underground mining environment. IFAC Proc. Vol. 2005, 38, 37–48. [Google Scholar] [CrossRef]
- Chi, H.; Zhan, K.; Li, J.; Guo, X. Key location and navigation technologies for underground autonomous LHD. Min. Metall. 2009, 18, 57–60. [Google Scholar]
- Li, X. Research on Safety and Autonomous Navigation of Underground Hydraulic Drill Rig. Master’s Thesis, Central South University, Changsha, China, 2014. [Google Scholar]
- Yang, Y.; Lin, Y.; Huang, Y.; Hu, B. Navigation principle and algorithm of vehicle gyroless dead reckoning system. J. Xi’an Jiaotong Univ. 2001, 35, 1284–1287. [Google Scholar]
- Makela, H.; Akatemia, T.T.; Korkeakoulu, T. Outdoor Navigation of Mobile Robots; Helsinki University of Technology: Espoo, Finland, 2002. [Google Scholar]
- Borenstein, J.; Everett, H.R.; Feng, L. Where Am I? Sensors and Methods for Mobile Robot Positioning. 1996. Available online: http://www-personal.umich.edu/-johannb/position.htm (accessed on 25 July 2022).
- Witulska, J.; Jachnik, B.; Skoczylas, A. Recognition of LHD Position and Maneuvers in Underground Mining Excavations-identification and Parametrization of Turns. Appl. Sci. 2021, 11, 6075. [Google Scholar] [CrossRef]
- Wu, D. Positioning Technology of LHD Based on Stereo Visual Odometry. Ph.D. Thesis, University of Science and Technology Beijing, Beijing, China, 2019. [Google Scholar]
- Zhang, Q. Theoretical Research on Non-Line-of-Sight Ranging and Positioning Technology Based on UWB. Master’s Thesis, Beijing University of Posts and Telecommunications, Beijing, China, 2013. [Google Scholar]
- Chehri, A.; Fortier, P.; Tardif, P.M. On the TOA Estimation for UWB Ranging in Complex Confined Area. In Proceedings of the International Symposium on Signals, Montreal, QC, Canada, 30 July–2 August 2007; pp. 518–821. [Google Scholar]
- Weiss, L.E.; Sanderson, A.C.; Neuman, C.P. Dynamic Sensor-based Control of Robots with Visual Feedback. IEEE J. Robot. Autom. 1987, 3, 404–417. [Google Scholar] [CrossRef]
- Iu, S.; Wohn, K.Y. Estimation of 3-D motion and structure based on a temporally-oriented approach with the method of regression. In Proceedings of the Workshop on Visual Motion, Irvine, CA, USA, 20–22 March 1989. [Google Scholar]
- Mäkelä, H. Overview of LHD navigation without artificial beacons. Robot. Auton. Syst. 2001, 36, 21–35. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, H.; Zhao, A. Analysis of vehicle location and navigation algorithm for underground load-haul-dump. Acad. J. Manuf. Eng. 2018, 16, 21–26. [Google Scholar]
- Chi, H.; Zhan, K.; Guo, X. Positioning technology of underground autonomous LHD based on multi-sensor information fusion. Nonferr. Met. 2009, 4, 148–152. [Google Scholar]
- Jiang, Y. Combined positioning and navigation analysis of intelligent LHD based on joint Kalman filter algorithm. Machinery 2015, 53, 36–38. [Google Scholar]
- Skoczylas, A. Localization of LHD Machines in Underground Conditions Using IMU Sensors and DTW Algorithm. Appl. Sci. 2021, 11, 6751. [Google Scholar]
- Peng, Y.; Jiang, M.; Ma, Z. Review on development of key technology for autonomous vehicle. J. Fuzhou Univ. Nat. Sci. Ed. 2021, 49, 691–703. [Google Scholar]
- Ke, Z. A Survey of Path Planning Algorithms for Unmanned Vehicles. Equip. Manuf. Technol. 2021, 6, 111–113. [Google Scholar]
- Li, W.; Su, X. AGV path planning based on improved A* algorithm. Mod. Manuf. Eng. 2015, 421, 39–42. [Google Scholar]
- Zheng, T.; Xu, Y.; Zheng, D. AGV Path Planning based on Improved A-star Algorithm. In Proceedings of the 2019 IEEE 3rd Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 11–13 October 2019; pp. 276–279. [Google Scholar]
- Ma, F.; Yang, H.; Gu, Q.; Meng, Y. Navigation Path Planning of Unmanned Underground LHD Based on Improved A* Algorithm. Trans. Chin. Soc. Agric. Mach. 2015, 46, 303–309. [Google Scholar]
- Qi, Y.; Meng, Q.; Xu, T. Research on Navigation Path Planning for An Underground Load Haul Dump. J. Eng. Sci. Technol. Rev. 2015, 8, 102–109. [Google Scholar]
- Zafar, M.N.; Mohanta, J.C. Methodology for Path Planning and Optimization of Mobile Robots: A Review—ScienceDirect. Procedia Comput. Sci. 2018, 133, 141–152. [Google Scholar] [CrossRef]
- Li, S.; Song, Q.; Li, Z. Research review of genetic algorithm in robot path planning. Sci. Technol. Eng. 2020, 20, 423–431. [Google Scholar]
- Zhang, Y.; Ma, R.; Zhang, J. Obstacle Avoidance Simulation of Autonomous Vehicles Based on Hierarchical Fuzzy Control. Meas. Control Technol. 2012, 031, 67–70. [Google Scholar]
- Afifi, A.M.; Alhosainy, O.H.; Elias, C.M. Deep Policy-Gradient Based Path Planning and Reinforcement Cooperative Q-Learning Behavior of Multi-Vehicle Systems. In Proceedings of the 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 4–6 September 2019; pp. 1–7. [Google Scholar]
- Cruz, D.L.; Yu, W. Path planning of multi-agent systems in unknown environment with neural kernel smoothing and reinforcement learning. Neurocomputing 2017, 233, 34–42. [Google Scholar] [CrossRef]
- Pang, K. Research on Automatic Driving Decision-Making Method Based on Deep Reinforcement Learning. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2020. [Google Scholar]
- Long, Z.; Zhan, K.; Gu, H. Global path planning of intelligent Load-Haul-Dump based on improved Ant Colony Algorithm. Nonferr. Met. Mine Sect. 2013, 65, 6–10. [Google Scholar]
- Han, M.; Liu, J.; Wu, S. Path planning algorithm for mobile robots with particle swarm optimization. Comput. Appl. 2017, 37, 2258–2263. [Google Scholar]
- Glaser, S.; Vanholme, B.; Mammar, S. Maneuver-Based Trajectory Planning for Highly Autonomous Vehicles on Real Road With Traffic and Driver Interaction. IEEE Trans. Intell. Transp. Syst. 2010, 11, 589–606. [Google Scholar] [CrossRef]
- Kitazawa, S.; Kaneko, T. Control target algorithm for direction control of autonomous vehicles in consideration of mutual accordance in mixed traffic conditions. In Proceedings of the 13th International Symposium on Advanced Vehicle Control (AVEC’ 16), Munich, Germany, 13–16 September 2016. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. Ann Arbor 2008, 1001, 18–80. [Google Scholar]
- Gu, Q.; Liu, L.; Bai, G. Optimal turning trajectory planning of an LHD based on a bidimensional search. Chin. J. Eng. 2021, 43, 289–298. [Google Scholar]
- Li, Y.; Fan, R.; Yang, L. Research status and development trend of intelligent excavators. J. Mech. Eng. 2020, 56, 165–178. [Google Scholar]
- Available online: https://cpu.baidu.com/pc/1022/275122716/detail/56170715900109570/news?chk=1 (accessed on 25 July 2022).
- Ng, F.; Harding, J.A.; Glass, J. Improving hydraulic excavator performance through in line hydraulic oil contamination monitoring. Mech. Syst. Signal Process. 2017, 83, 176–193. [Google Scholar] [CrossRef]
- Stefaniak, P.; Liwiński, P.; Poczynek, P. The Automatic Method of Technical Condition Change Detection for LHD Machines-Engine Coolant Temperature Analysis. In International Conference on Condition Monitoring of Machinery in Non-Stationary Operation; Springer Nature: Cham, Switzerland, 2019; pp. 54–63. [Google Scholar]
- Huan, S.; Jin, T.; Li, L. Fault prediction of hybrid LHD based on optimized LSSVM-HMM. J. China Coal Soc. 2019, 44, 338–344. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Foreign | China |
|---|---|---|
| Retrieval date | 17 May 2022 | 17 May 2022 |
| Database | Web of Science Core Collection (WOS) | CNKI |
| Retrieval method | TS = (autonomous OR automatic OR intelligent OR navigation OR location OR unmanned OR track OR remote OR route plan OR control OR shovel OR perception OR model OR underground mining OR sensors) AND TS = (load haul dump) | SU = (“intelligent” + “unmanned” + “autonomous” + “automatic” + “track” + “location” + “navigation” + “remote” + “control”) × (“load haul dump”) |
| Time span | 1980–2022 | 1980–2022 |
| Number of documents retrieved/article | 127 | 449 |
| Number of valid documents/article | 127 | 158 |
| imported into CiteSpace software | 125 | 142 |
| Positioning Method | Advantage | Disadvantage |
|---|---|---|
| Dead Reckoning | It can achieve high accuracy with low cost in the short term | Errors will accumulate over a long period of time |
| Inertial Navigation | It is unaffected by external factors and shows good concealment | Errors will accumulate over time and the equipment are expensive |
| UWB Positioning | It is insensitive to channel fading, with simple system and high positioning accuracy | Multiple base stations are required, which is costly |
| Visual Positioning | It shows high positioning accuracy | Roadway dust, light intensity and other environmental factors affect the positioning easily |
| Information fusion positioning | It is extensively applied, with high positioning accuracy | The cost and calculating complexity increase |
| Algorithm | Advantage | Disadvantage |
|---|---|---|
| A* algorithm | It responds quickly to the environment | It has large amount of computation, poor real-time performance and long operation time |
| Fast Random Search Tree Algorithm | The search is highly efficient and is adaptable to different scenes | It is nonautonomous and time consuming for the path planning |
| Genetic Algorithm | Easy to plan for the global optimal path | The calculating speed is slow with low search efficiency |
| Neural Network Algorithm | high fault tolerated and generalization ability | Huge training data is required and there may be some unexpected data which is difficult to be handled |
| Ant Colony Algorithm | The optimal path can be searched at multiple points in the global area at the same time | Easy to fall into local optimum and slow convergence |
| Particle Swarm Algorithm | Fast search speed and good environment adaptability | Easy to result in local optimum and low convergence accuracy |
| Artificial Potential Field | Simple structure, convenient for bottom real-time control | Easy to simply obtain a local optimal solution and “chattering” phenomenon would occur |
| Fuzzy Logic Algorithm | The uncertainty and ambiguity for data processing can be overcame, exhibiting good real-time performance | It is expert in experience and requires large amount of calculation for complicated situations |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, W.; Liu, M.; Chen, X. Research Status and Development Trend of Underground Intelligent Load-Haul-Dump Vehicle—A Comprehensive Review. Appl. Sci. 2022, 12, 9290. https://doi.org/10.3390/app12189290
Xiao W, Liu M, Chen X. Research Status and Development Trend of Underground Intelligent Load-Haul-Dump Vehicle—A Comprehensive Review. Applied Sciences. 2022; 12(18):9290. https://doi.org/10.3390/app12189290
Chicago/Turabian StyleXiao, Wei, Mingxia Liu, and Xubing Chen. 2022. "Research Status and Development Trend of Underground Intelligent Load-Haul-Dump Vehicle—A Comprehensive Review" Applied Sciences 12, no. 18: 9290. https://doi.org/10.3390/app12189290
APA StyleXiao, W., Liu, M., & Chen, X. (2022). Research Status and Development Trend of Underground Intelligent Load-Haul-Dump Vehicle—A Comprehensive Review. Applied Sciences, 12(18), 9290. https://doi.org/10.3390/app12189290