
Wall-Climbing Mobile Robot for Inspecting DEMO Vacuum Vessel



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Design of the WMR
2.1. Requirements for the WMR
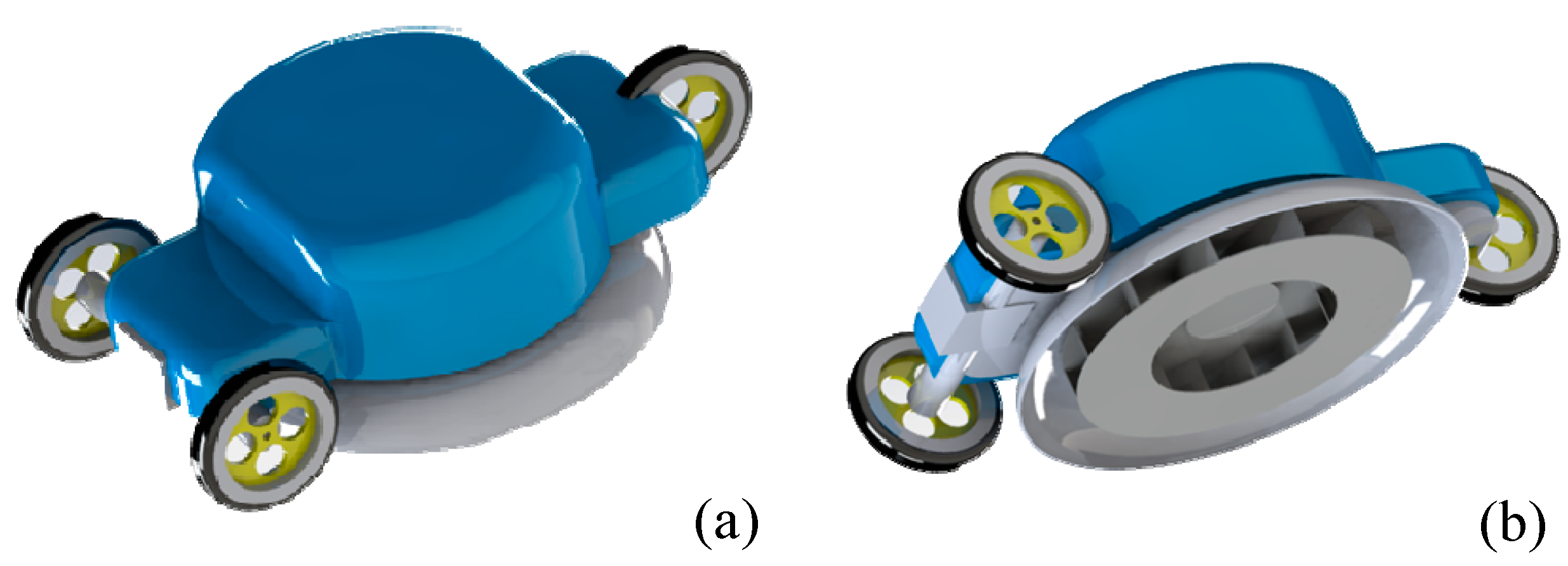
2.2. The Concept of the WMR
3. Kinematic Analysis of WMR
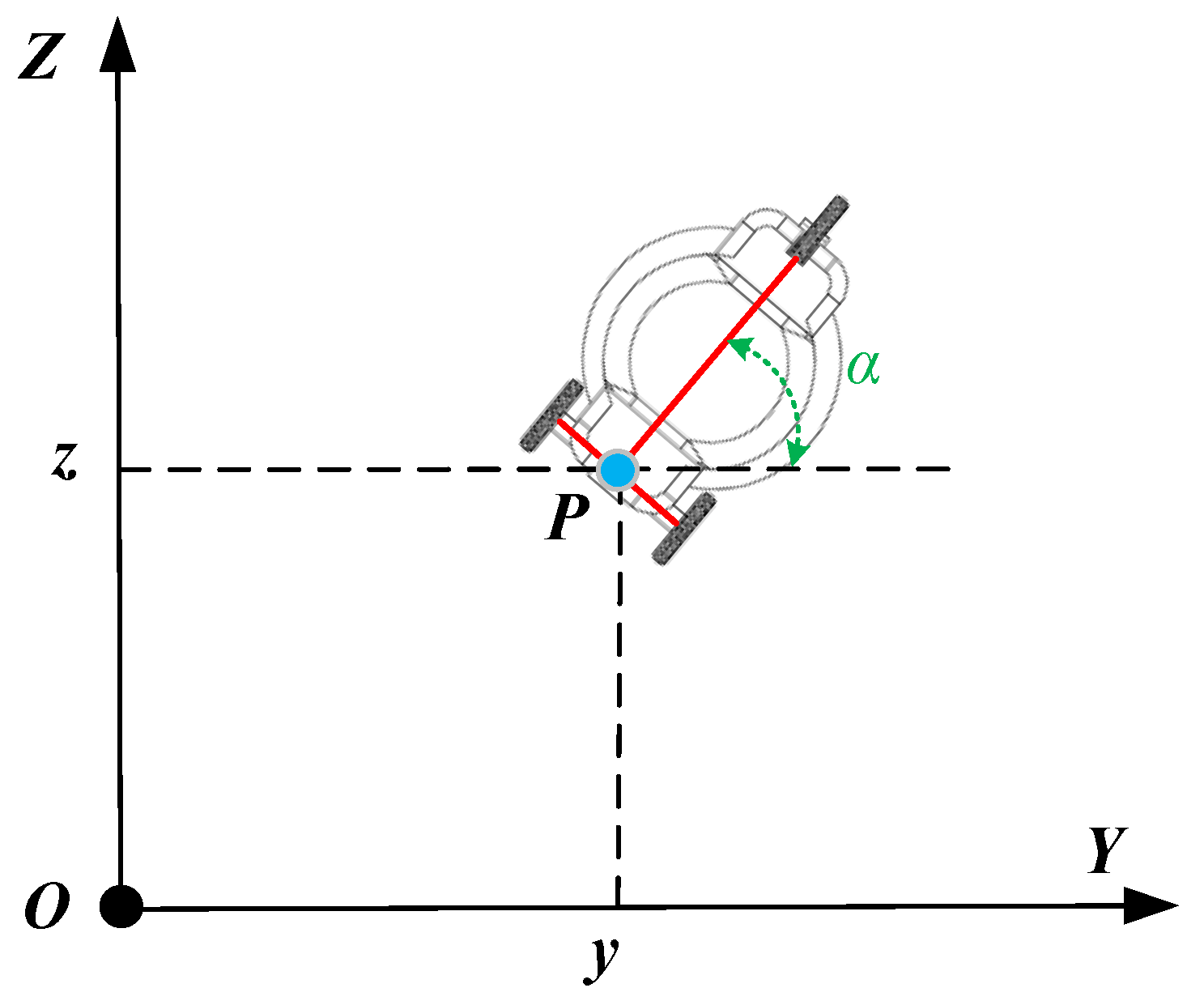
3.1. Kinematic Modelling
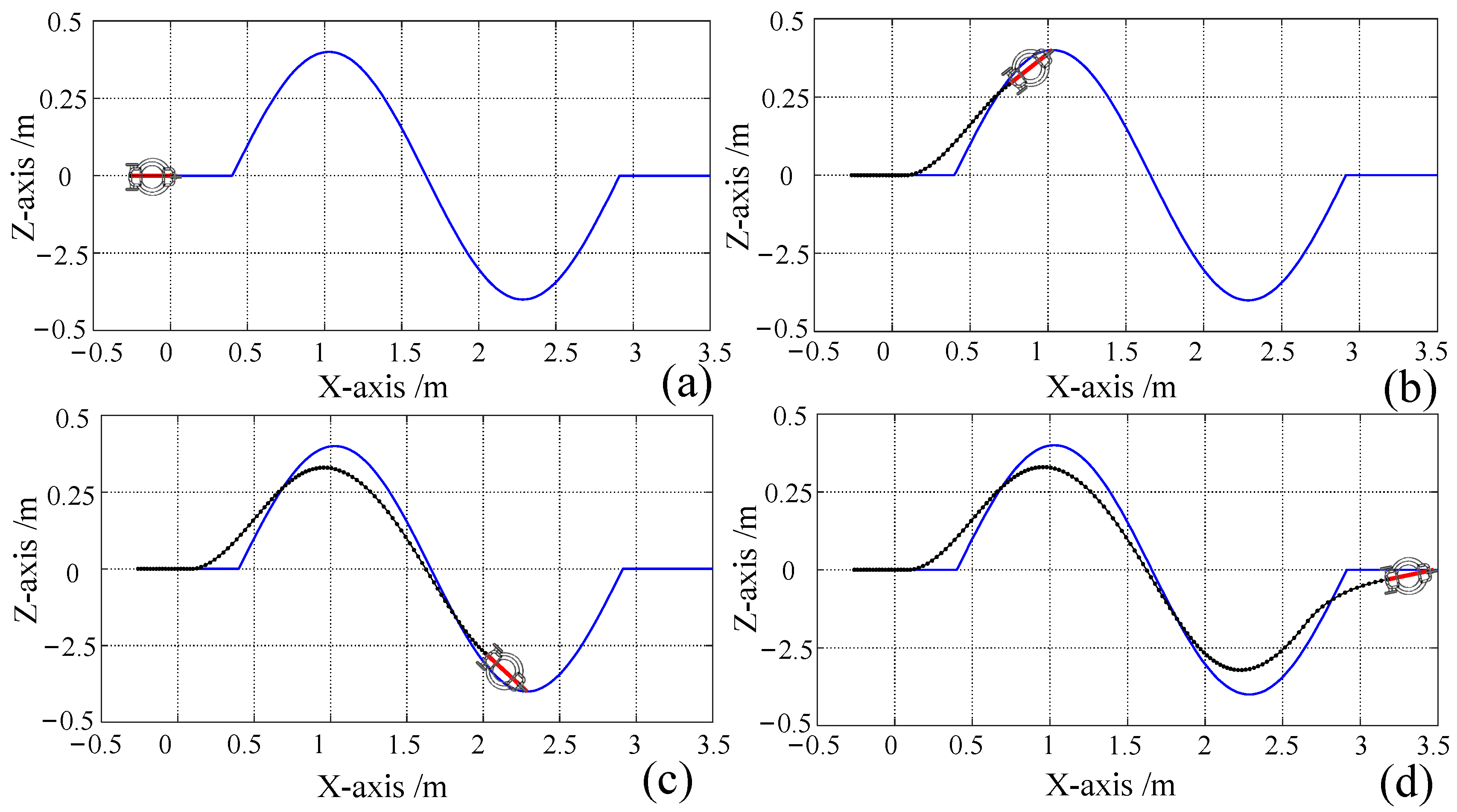
3.2. Trajectory Tracking Motion Control
4. Aerodynamic Study and Finite Element Analysis
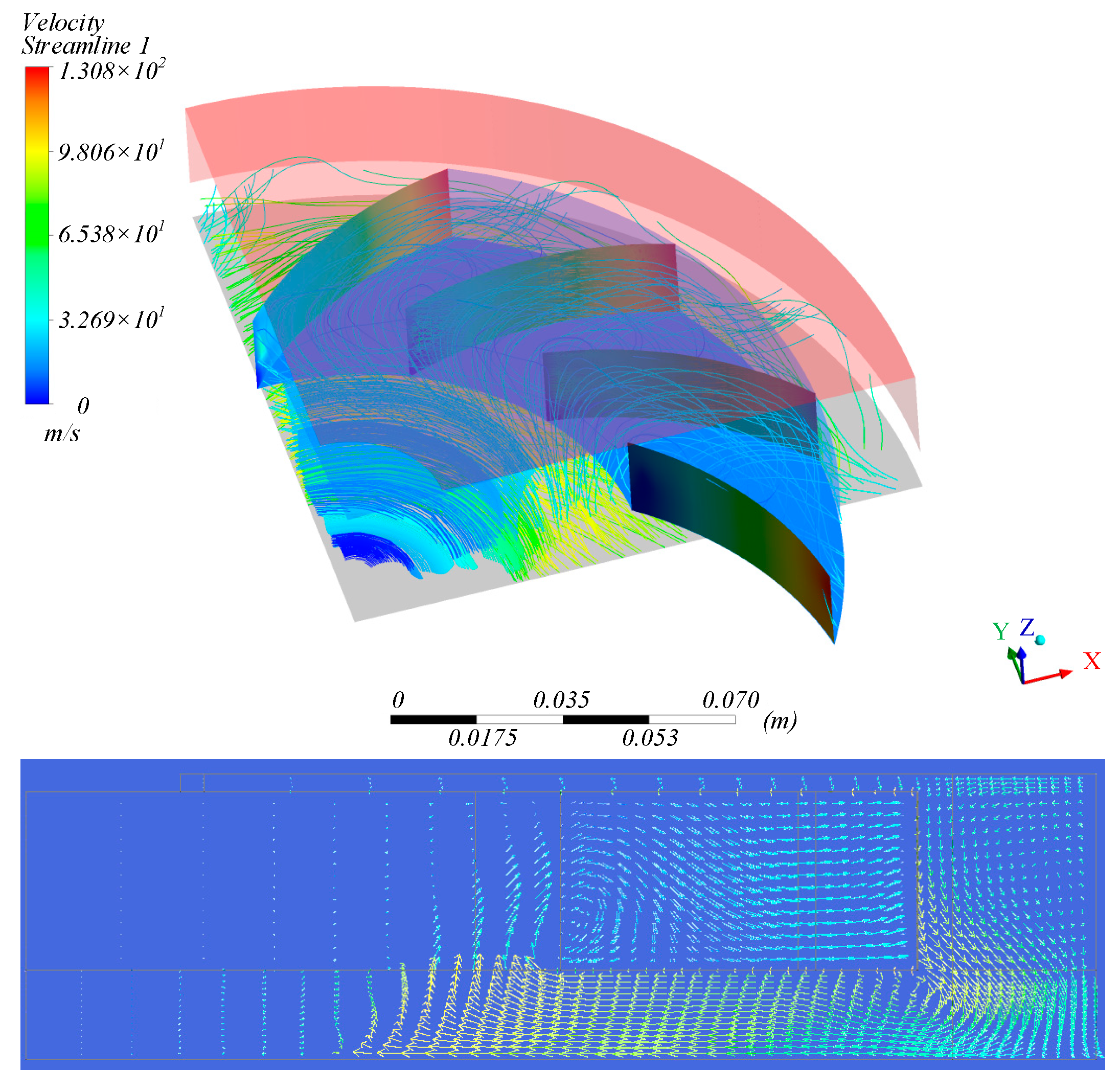
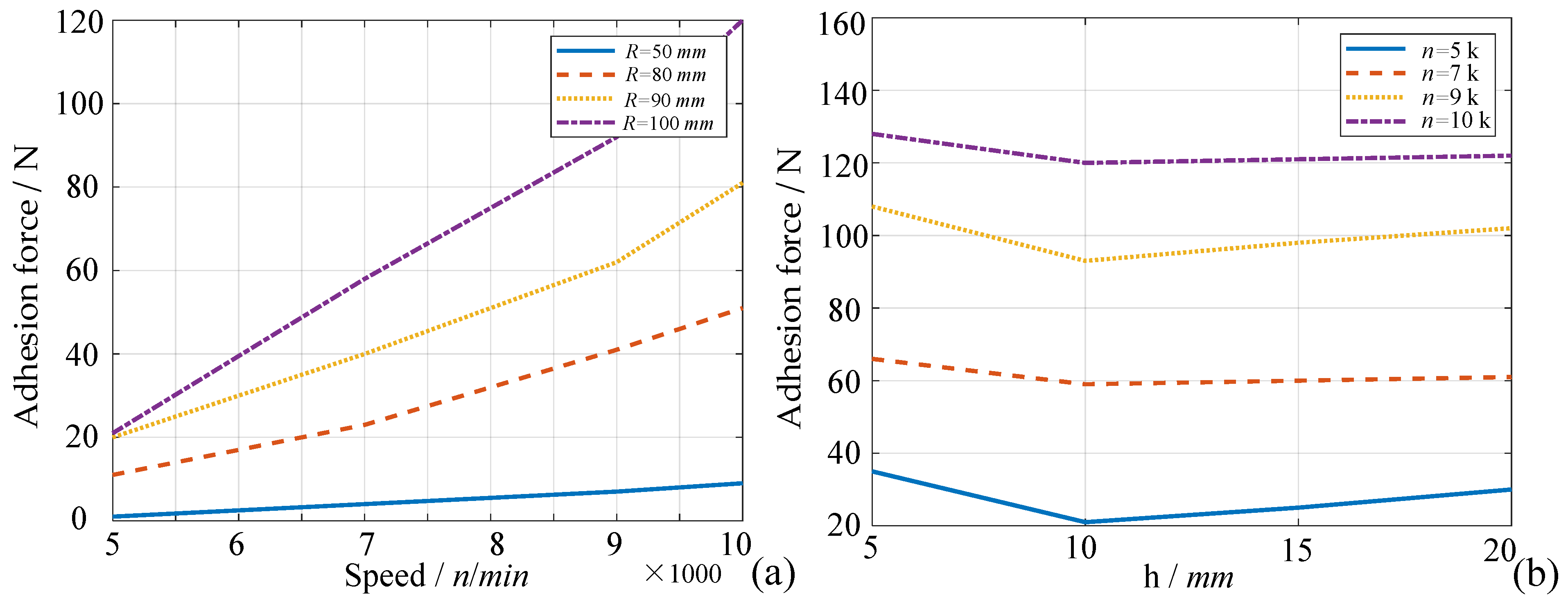
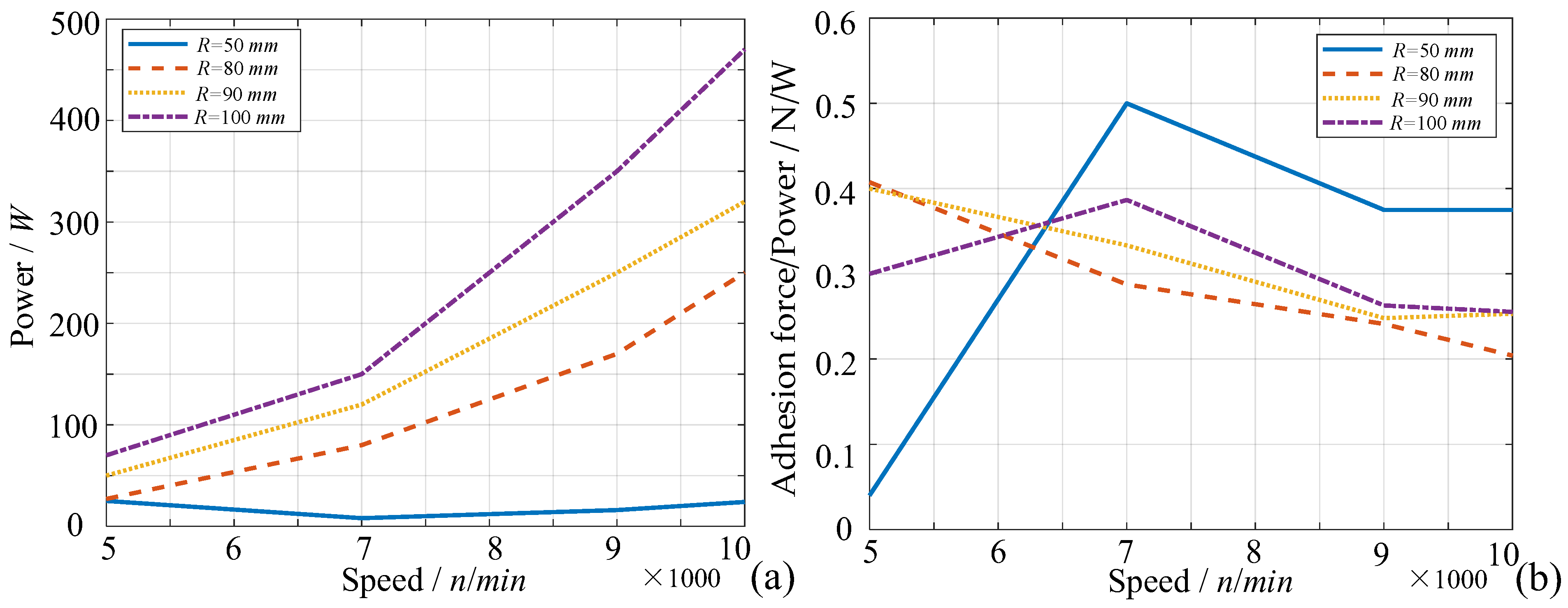
4.1. Aerodynamic Study
4.2. Finite Element Analysis
5. Adsorption Control Analysis
5.1. Modelling of Adsorption Systems
- (a)
- The waveform of the counter-electromotive force is an ideal flat-topped trapezoidal waveform;
- (b)
- The magnetic circuit of the motor is not saturated during rotation;
- (c)
- The eddy current and hysteresis losses of the motor are negligible.
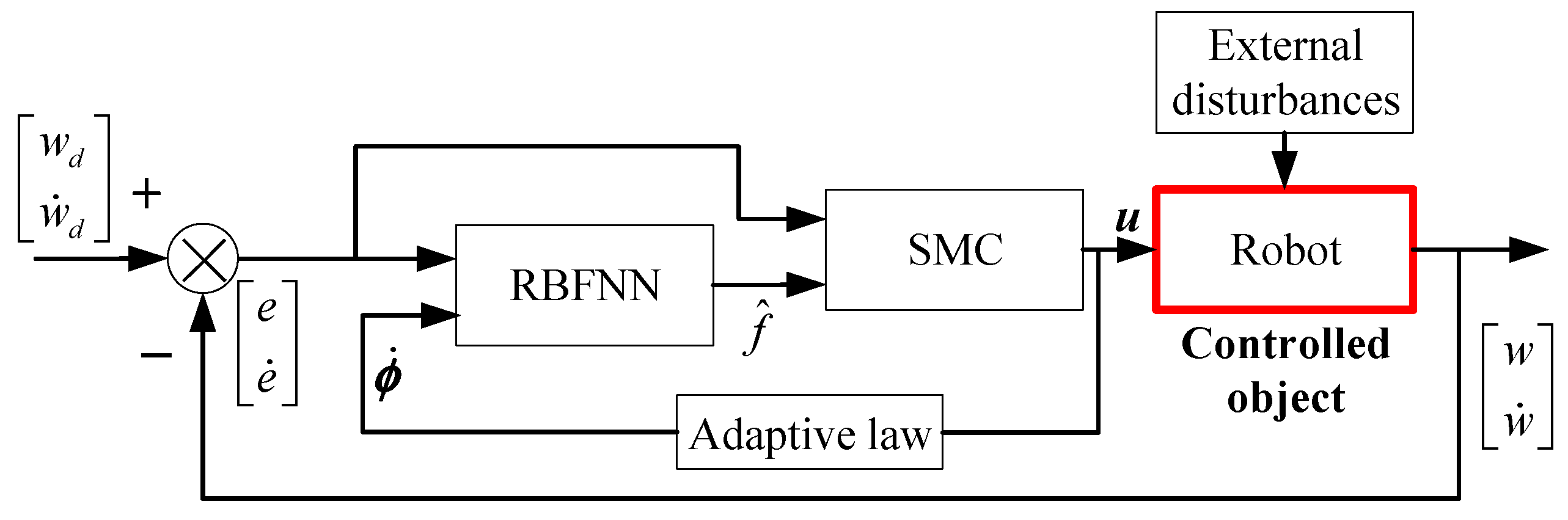
5.2. Sliding Mode Robust Controller
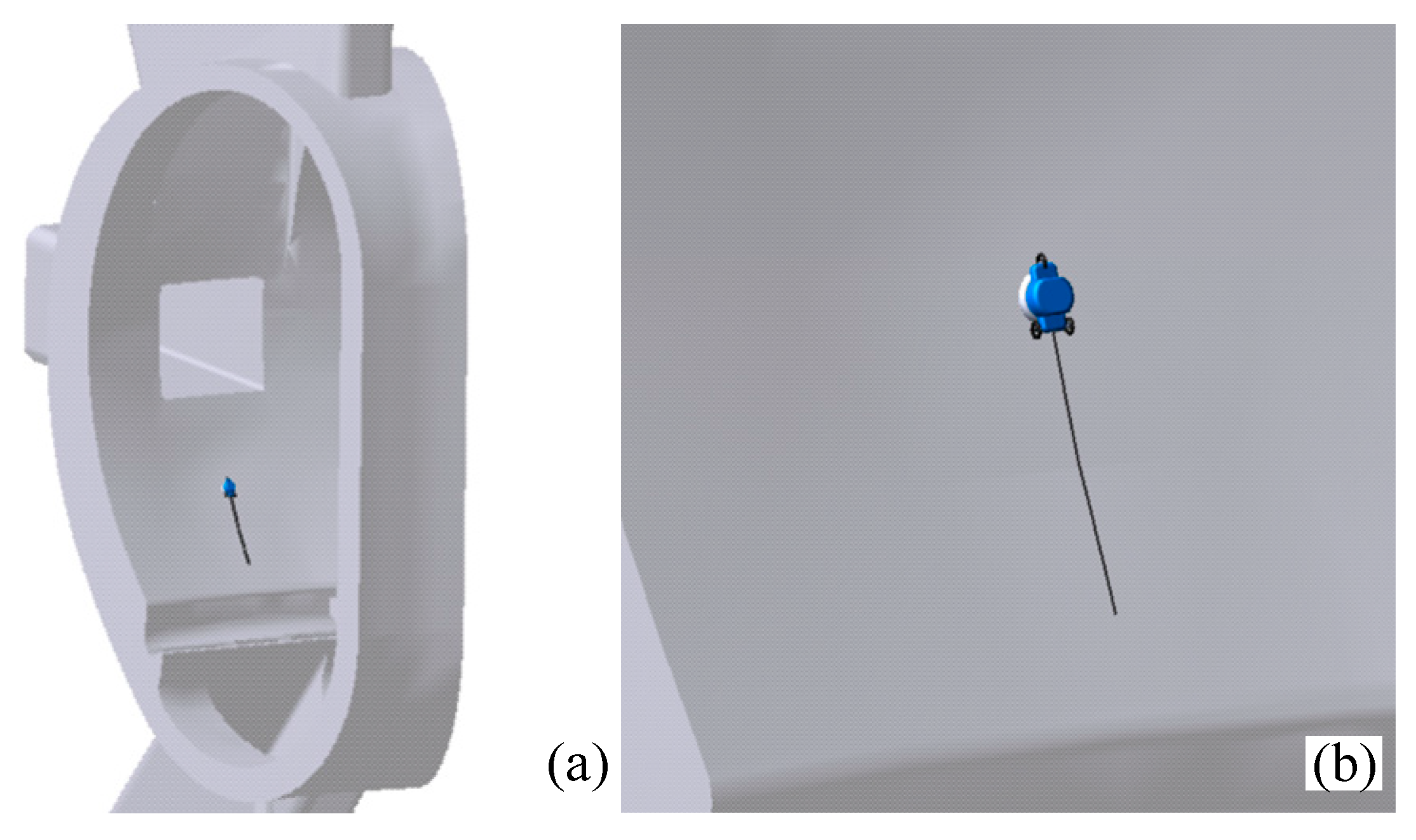
6. Prototype and Test
6.1. Control System
6.2. Prototype Testing
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bigot, B. ITER assembly phase: Progress toward first plasma. Fusion Eng. Des. 2021, 164, 112207. [Google Scholar] [CrossRef]
- Ciattaglia, S.; Federici, G.; Barucca, L.; Lampasi, A.; Minucci, S.; Moscato, I. The European DEMO fusion reactor: Design status and challenges from balance of plant point of view. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Choi, C.; Sborchia, C.; Ioki, K.; Giraud, B.; Utin, Y.; Sa, J.; Wang, X.; Teissier, P.; Martinez, J.; Le Barbier, R.; et al. Status of the ITER vacuum vessel construction. Fusion Eng. Des. 2014, 89, 1859–1863. [Google Scholar] [CrossRef]
- Wu, H.; Handroos, H.; Pela, P.; Wang, Y. IWR-solution for the ITER vacuum vessel assembly. Fusion Eng. Des. 2011, 86, 1834–1837. [Google Scholar] [CrossRef]
- Shibama, Y.; Okano, F.; Yagyu, J.; Kaminaga, A.; Miyo, Y.; Hayakawa, A.; Sagawa, K.; Mochida, T.; Morimoto, T.; Hamada, T.; et al. Welding technology on sector assembly of the JT-60SA vacuum vessel. Fusion Eng. Des. 2015, 98, 1614–1619. [Google Scholar] [CrossRef]
- Shibama, Y.; Masaki, K.; Sakasai, A.; Hanada, M.; Okano, F.; Yagyu, J.; Ichige, H.; Miyo, Y.; Kaminaga, A.; Sasajima, T.; et al. Assembly technologies of the Vacuum Vessel on JT-60SA with high accuracy. Fusion Eng. Des. 2017, 125, 1–8. [Google Scholar] [CrossRef]
- Masaki, K.; Shibama, Y.K.; Sakurai, S.; Shibanuma, K.; Sakasai, A. JT-60SA vacuum vessel manufacturing and assembly. Fusion Eng. Des. 2012, 87, 742–746. [Google Scholar] [CrossRef]
- Luk, B.L.; Collie, A.A.; Piefort, V.; Virk, G.S. Robug III: A Tele-Operated Climbing and Walking Robot. In Proceedings of the International Conference on Control, Exeter, UK, 2–5 September 1996; Volume 427, pp. 347–352. [Google Scholar]
- Leibbrandt, A.; Caprari, G.; Angst, U.; Siegwart, R.Y.; Flatt, R.J.; Elsener, B. Climbing Robot for Corrosion Monitoring of Reinforced Concrete Structures. In Proceedings of the 2nd International Conference on Applied Robotics for the Power Industry, Zurich, Switzerland, 11–13 September 2012; pp. 10–15. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, X. Design of Wall-Climbing Robot Using Electrically Activated Rotational-Flow Adsorption Unit. In Proceedings of the International Conference on Intelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 5758–5763. [Google Scholar] [CrossRef]
- Park, S.H.; Seo, K.J.; Kim, S.G. Development of wall climbing robot using vacuum adsorption with legged type movement. J. Korea. Acad. Ind. Coop. Soc. 2017, 18, 344–349. [Google Scholar]
- Zhou, Q.; Li, X. Experimental investigation on climbing robot using rotation-flow adsorption unit. Robot. Auton. Syst. 2018, 105, 112–120. [Google Scholar] [CrossRef]
- Hillenbrand, C.; Schmidt, D.; Berns, K. CROMSCI: Development of a climbing robot with negative pressure adhesion for inspections. Ind. Robot. 2008, 35, 228–237. [Google Scholar] [CrossRef]
- Zhao, Z.; Tao, Y.; Wang, J.; Hu, J. The multi-objective optimization design for the magnetic adsorption unit of wall-climbing robot. J. Mech. Sci. Technol. 2022, 36, 305–316. [Google Scholar] [CrossRef]
- Navaprakash, N.; Ramachandraiah, U.; Muthukumaran, G.; Rakesh, V.; Singh, A.P. Modeling and experimental analysis of suction pressure generated by active suction chamber-based wall climbing robot with a novel bottom restrictor. Procedia. Comput. Sci. 2018, 133, 847–854. [Google Scholar]
- Zhang, F.; Sun, X.; Li, Z.; Mohsin, I.; Wei, Y.; He, K. Influence of Processing Parameters on Coating Removal for High Pressure Water Jet Technology Based on Wall-Climbing Robot. Appl. Sci. 2020, 10, 1862. [Google Scholar] [CrossRef]
- Wu, S.; Wu, L.; Liu, T. Design of a sliding wall climbing robot with a novel negative adsorption device. In Proceedings of the 8th International Conference on Ubiquitous Robots and Ambient Intelligence, Incheon, Korea, 23–26 November 2011; pp. 97–100. [Google Scholar] [CrossRef]
- Hameed, A.H.; Al-Dujaili, A.Q.; Humaidi, A.J.; Hussein, H.A. Design of Terminal Sliding Position Control for Electronic Throttle Valve System: A Performance Comparative Study. Int. Rev. Autom. Control 2019, 12, 251. [Google Scholar] [CrossRef]
- Teng, D.; Li, F.X.; Gao, X.S.; Guan, W. Introduce a Negative Pressure Wall-Climbing Robot with the ARM System. Appl. Mech. Mater. 2015, 713, 805–809. [Google Scholar] [CrossRef]
- Ajeil, F.H.; Ibraheem, I.K.; Azar, A.T.; Humaidi, A.J. Autonomous navigation and obstacle avoidance of an omnidirectional mobile robot using swarm optimization and sensors deployment. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420929498. [Google Scholar] [CrossRef]
- Zhong, Z.; Xu, M.; Xiao, J.; Lu, H. Design and Control of an Omnidirectional Mobile Wall-Climbing Robot. Appl. Sci. 2021, 11, 11065. [Google Scholar] [CrossRef]
- Dian, S.; Fang, H.; Zhao, T.; Wu, Q.; Hu, Y.; Guo, R.; Li, S. Modeling and trajectory tracking control for magnetic wheeled mobile robots based on im-proved dual-heuristic dynamic programming. IEEE. Trans. Ind. Inform. 2020, 17, 1470–1482. [Google Scholar] [CrossRef]
- Zhang, Y.; Qin, Z.; Luo, S.; Hyunjo, J.; Zhang, S. Design and Application of Partial Immersion Focused Ultrasonic Transducers for Austenitic Weld Inspection. Sensors 2022, 22, 2671. [Google Scholar] [CrossRef]
- Ramatlo, D.A.; Long, C.S.; Loveday, P.W.; Wilke, D.N. Physics-based modelling and simulation of reverberating reflections in ultra-sonic guided wave inspections applied to welded rail tracks. J. Sound. Vib. 2022, 530, 116914. [Google Scholar] [CrossRef]
- Crofts, O.; Loving, A.; Torrance, M.; Budden, S.; Drumm, B.; Tremethick, T.; Chauvin, D.; Siuko, M.; Brace, W.; Milushev, V.; et al. EU DEMO Remote Maintenance System development during the Pre-Concept De-sign Phase. Fusion Eng. Des. 2022, 179, 113121. [Google Scholar] [CrossRef]
- Cetina-Denis, J.J.; Lopéz-Gutiérrez, R.M.; Cruz-Hernández, C.; Arellano-Delgado, A. Design of a Chaotic Trajectory Generator Algorithm for Mobile Robots. Appl. Sci. 2022, 12, 2587. [Google Scholar] [CrossRef]
- Zhao, Y.; BeMent, S.L. Kinematics, Dynamics and Control of Wheeled Mobile Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Nice, France, 12–14 May 1992; pp. 91–96. [Google Scholar]
- Qin, G.; Wu, H.; Cheng, Y.; Pan, H.; Zhao, W.; Shi, S.; Song, Y.; Ji, A. Adaptive trajectory control of an under-actuated snake robot. Appl. Math. Model. 2022, 106, 756–769. [Google Scholar] [CrossRef]
- Figliolini, G.; Lanni, C.; Angeles, J. Kinematic Analysis of the Planar Motion of Vehicles when Traveling Along Tractrix Curves. J. Mech. Robot. 2020, 12, 054502. [Google Scholar] [CrossRef]
- Vinuesa, R.; Brunton, S.L. Enhancing computational fluid dynamics with machine learning. Nature. Comput. Sci. 2022, 2, 358–366. [Google Scholar]
- Wang, J.; Kruyt, N.P. Computational Fluid Dynamics Simulations of Aerodynamic Performance of Low-Pressure Axial Fans with Small Hub-to-Tip Diameter Ratio. J. Fluids Eng. 2020, 142, 091202. [Google Scholar] [CrossRef]
- Kuzhakhmetova, E. Modeling of a piled foundation in a Femap with NX Nastran. Struct. Mech. Eng. Constr. Build. 2020, 16, 250–260. [Google Scholar] [CrossRef]
- Birtles, P. Introducing CAE into the aerospace industry. Electron. Power 1983, 29, 59–62. [Google Scholar] [CrossRef]
- Fang, J.X. Position Sensorless Control of Brushless DC Motor. Adv. Mater. Res. 2014, 915, 418–421. [Google Scholar] [CrossRef]
- Prasad, G.; Ramya, N.S.; Prasad, P.V.N.; Das, G.T.R. Modelling and Simulation Analysis of the Brushless DC Motor by using MATLAB. Int. J. Innov. Tech. Explor. Eng. 2012, 1, 27–31. [Google Scholar]
- Chen, L.; Liu, Z.; Gao, H.; Wang, G. Robust adaptive recursive sliding mode attitude control for a quadrotor with unknown disturbances. ISA Trans. 2022, 122, 114–125. [Google Scholar] [CrossRef]
- Dou, G.; Yu, W.; Li, Z.; Khajepour, A.; Tan, S. Sliding mode control of laterally interconnected air suspensions. Appl. Sci. 2020, 10, 4320. [Google Scholar]
- Moody, J.; Darken, C.J. Fast Learning in Networks of Locally-Tuned Processing Units. Neural Comput. 1989, 1, 281–294. [Google Scholar] [CrossRef]
- Kong, D.; Wang, W.; Guo, D.; Shi, Y. RBF Sliding Mode Control Method for an Upper Limb Rehabilitation Exoskeleton Based on Intent Recognition. Appl. Sci. 2022, 12, 4993. [Google Scholar] [CrossRef]
- Liu, J. Sliding Mode Control Using MATLAB; Academic Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Li, H.; Sun, X.; Chen, Z.; Zhang, L.; Wang, H.; Wu, X. Design of a wheeled wall climbing robot based on the performance of bio-inspired dry adhesive material. Robotica 2022, 40, 611–624. [Google Scholar] [CrossRef]
- He, Q.; Xu, X.; Yu, Z.; Huo, K.; Wang, Z.; Chen, N.; Sun, X.; Yin, G.; Du, P.; Li, Y.; et al. Optimized bio-inspired micro-pillar dry adhesive and its application for an unmanned aerial vehicle adhering on and detaching from a ceiling. J. Bionic. Eng. 2020, 17, 45–54. [Google Scholar] [CrossRef]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, G.; Li, C.; Wu, H.; Ji, A. Wall-Climbing Mobile Robot for Inspecting DEMO Vacuum Vessel. Appl. Sci. 2022, 12, 9260. https://doi.org/10.3390/app12189260
Qin G, Li C, Wu H, Ji A. Wall-Climbing Mobile Robot for Inspecting DEMO Vacuum Vessel. Applied Sciences. 2022; 12(18):9260. https://doi.org/10.3390/app12189260
Chicago/Turabian StyleQin, Guodong, Changyang Li, Huapeng Wu, and Aihong Ji. 2022. "Wall-Climbing Mobile Robot for Inspecting DEMO Vacuum Vessel" Applied Sciences 12, no. 18: 9260. https://doi.org/10.3390/app12189260
APA StyleQin, G., Li, C., Wu, H., & Ji, A. (2022). Wall-Climbing Mobile Robot for Inspecting DEMO Vacuum Vessel. Applied Sciences, 12(18), 9260. https://doi.org/10.3390/app12189260