1. Introduction
Magnetorheological (MR) fluid is a smart material that can be used to develop control systems for engineering applications. This fluid reacts to a magnetic field and provides a corresponding flow resistance. This reaction is extremely quick, can realize the required control operation, and is reversible. Therefore, researchers have been using MR fluid to convert passive actuators, such as dampers, brakes, clutches, mounts, and valves, into semiactive control devices.
First, active MR dampers can be used in civil construction works to decrease the vibration caused by earthquakes, and they can be used to isolate automobiles from road shocks [
1,
2]. In both applications, the frequency and magnitude of vibrations change actively. Passive dampers cannot vary the damping effect as required. Therefore, active and semiactive dampers are becoming increasingly popular. In conventional active dampers, the damping force is regulated by adjusting the damper orifice area, but the speed of this change is extremely low. To mitigate this problem, MR fluid technology is the most suitable and least energy-consuming alternative.
The second application is the MR brake. The flow resistance force of MR fluid can be used as a braking force. Based on this concept, disc-type, drum-type, single-pole, multipole, single-layer, and multilayer brakes have been developed [
3,
4,
5]. Moreover, MR technology is being used in clutches, seat suspension, and engine mounts. Sun [
6] developed a rotary MR damper for heavy-duty vehicle seat suspension, and Sarkar [
7] designed an MR mount to isolate the vibrations caused by engines.
Finally, another MR-fluid-based device is the MR valve, which is used in hydraulic and engine intake control systems. It is an excellent substitute for mechanical valves owing to advantages such as its low weight, ease of control, and lack of moving parts [
8]. To improve MR valve actuation, several MR valve structures have been developed, for example, the multistage structure, modular structure, and modular structure with meandering flow [
9].
In this context of MR valve application, the valve actuation requirements of internal combustion (IC) engines must be discussed. In an IC engine, the fuel valve must open and close in accordance with the engine’s operation cycle timing. Conventionally, cams and mechanical linkages with fixed timings are used to realize this control objective. However, to enhance performance, reduce emissions, and keep the engine running in its “sweet spot”, this actuation should be dynamic, that is, the valve opening timing and valve lift magnitude must vary with the engine’s speed and load [
10]. Therefore, engine developers have introduced variable valve timing (VVT) and variable valve lift (VVL) systems that contain various actuators. Several mechanical, hydraulic, and electronic actuators have been established to achieve VVT and VVL, and they all have their unique advantages and disadvantages [
11,
12,
13].
Shiao [
14] developed the first-generation MR valve for IC engines; this was a highly innovative concept in the domain of MR fluid applications. However, the design of that device is extremely complex; oil leakage from the buffer zone is a major problem, and the device’s volume is too high. Therefore, in the next-generation MR valve, the buffer zone was replaced with a buffer spring, and a key component called the magnetic plate block was optimized [
15,
16].
MR valve train devices remain at the conceptual study level. Therefore, detailed and realistic analyses are needed to estimate their actual performance. Magnetic simulations, thermal field simulations, and coupled-effects simulations are necessary to understand the realistic conditions under which these devices could be used. Patil [
17] studied the temperature rise in an MR brake by using the physics coupling technique. In [
17], the author performed a multiphysics analysis (coupled magnetic and thermal analysis) to optimize the magnetic plate block. By using Maxwell’s equations, the Naiver–Stokes equations, and the conjugate heat transfer equations, a multiphysics model was established. Meng [
18] used a similar multidisciplinary coupled-field analysis method to investigate the temperature distribution in an MR brake. These studies exemplify the importance of multiphysics analyses. Therefore, the multiphysics analysis method was employed to optimize the MR valve. This paper majorly contributes the following
- ➢
This study introduces a new variable valve train in which MR fluid technology is used to improve the performance of IC engines.
- ➢
This study developed a multiphysics model to understand the effect of generated heat on the performance of the MR valve.
- ➢
This study used multiphysics software to find the best possible dimensions for the magnetic plate block, which is the main functional part of the proposed MR valve train.
- ➢
This study manufactured and tested the prototype of the proposed device to validate its performance.
2. New Lightweight MR Valve Train
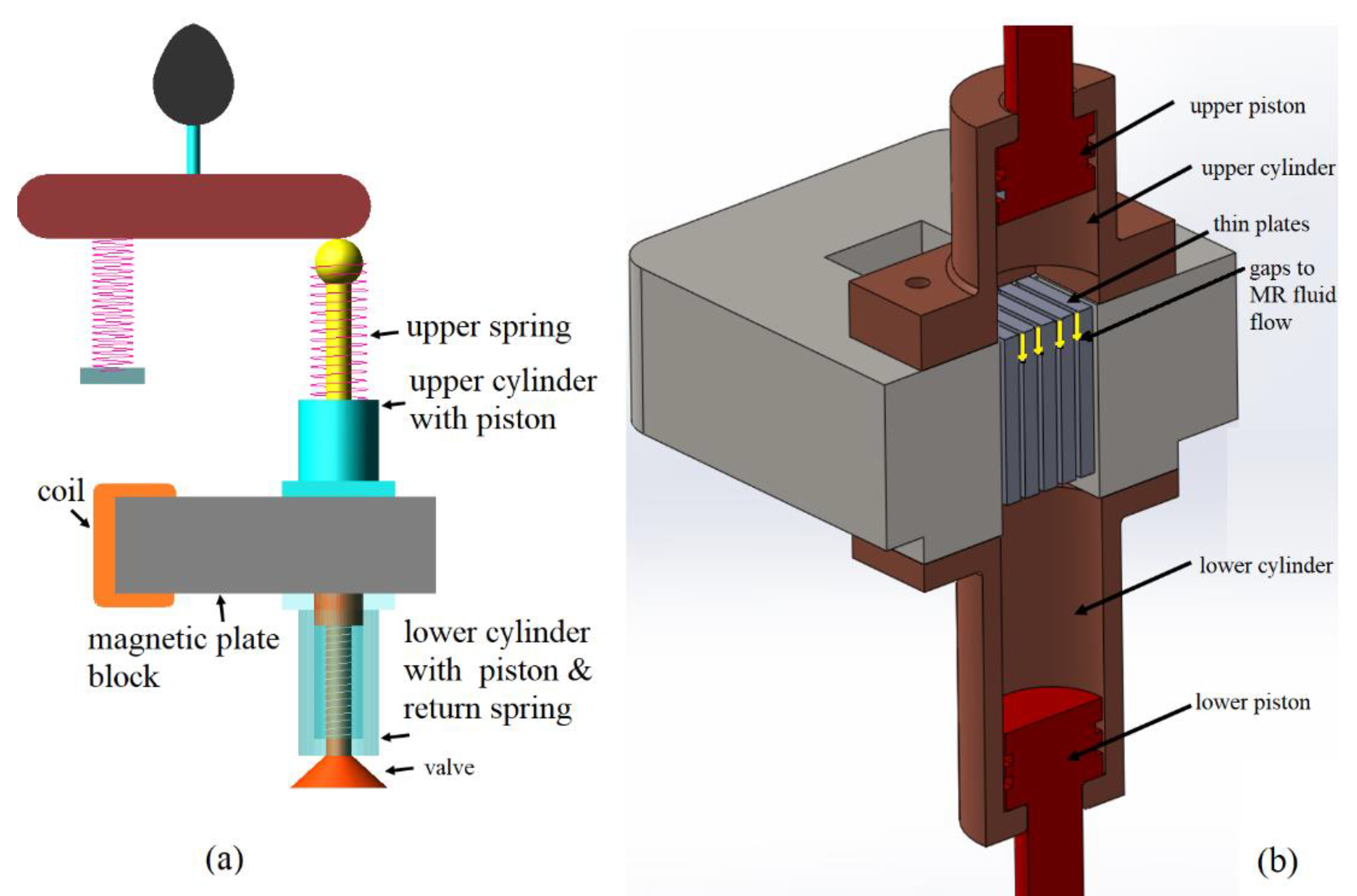
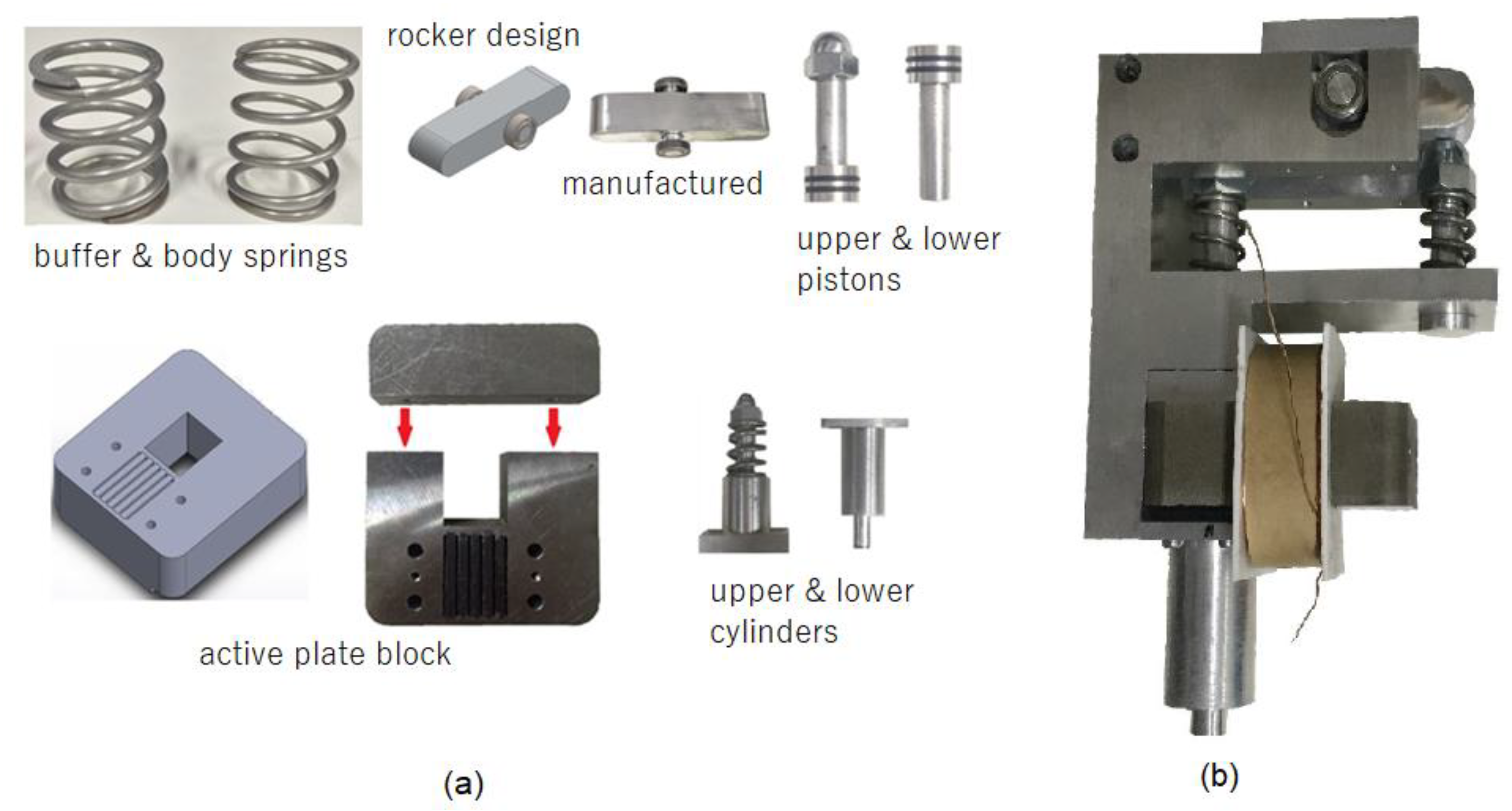
The proposed MR-fluid-based variable valve comprises the following: a rocker arm; an upper piston; a lower piston; a magnetic plate block; three springs, namely a buffer spring, an upper spring, and a return spring, as depicted in
Figure 1a. The upper piston is placed in the upper cylinder and connected to the rocker arm through the upper spring. The lower piston is positioned in the lower cylinder and connected to the valve and the return spring. These upper and lower cylinders are filled with MR fluid, and a magnetic plate block separates them.
Figure 1b illustrates the arrangement of these cylinders and pistons. The magnetic plate block comprises an electromagnetic coil area, which generates the required magnetic field; a rectangular channel, which transfers the field, and several thin and parallel plates, which facilitate the flow of MR fluid from the upper cylinder to the lower cylinder through the gaps between the aforementioned thin parallel plates.
When the cam rotates with default engine timing, the rocker arm follows the cam, and it transfers equal lift forces to the upper and buffer springs. Then, the upper piston pushes the MR fluid into the cylinder. Thereafter, the MR fluid transfers this pushing force to the lower piston by flowing through the magnetic plate block. The magnetized thin plates in the magnetic plate block resist the MR fluid flow that eventually acts against the lift force distribution from the rocker side to the valve side. The magnitude of this force is proportional to the current in the coil. Therefore, the valve opening timing and lift can no longer follow the default cam timing; they change with the coil current. The working mechanism of the proposed valve train can be explained by dividing the mechanism into three modes: the fully lifted, fully closed, and partially open modes.
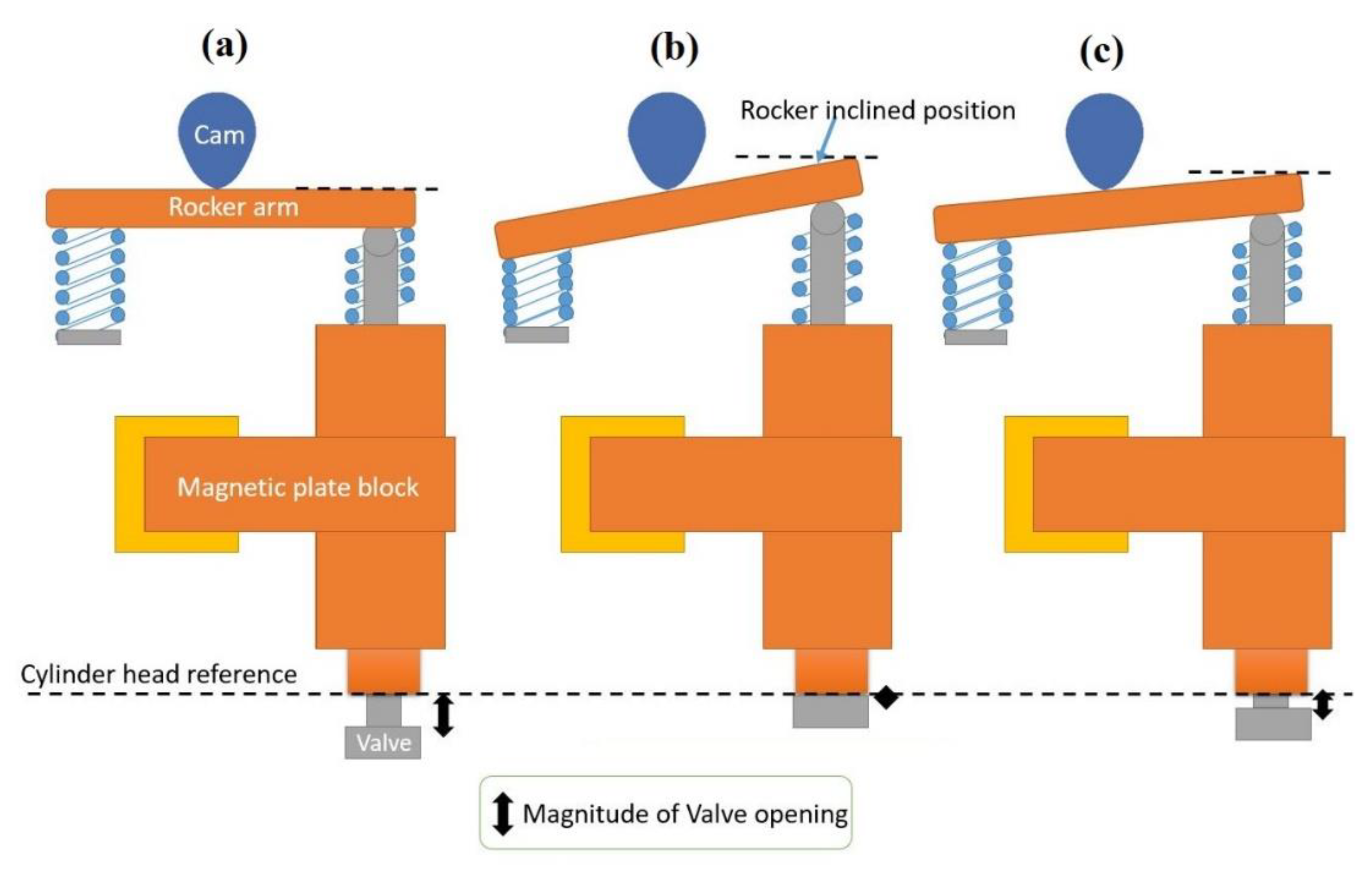
First,
Figure 2a shows the MR valve in the fully lifted mode. The cam force is transferred to the rocker arm, then to the body’s upper piston, and finally to the magnetic plate block. At this juncture, the magnetic pole coil does not generate any current, that is, the MR fluid layers do not offer any resistance. Therefore, the valve opens smoothly and completely. During this process, the upper and lower springs, as well as the side-by-side spring, are compressed simultaneously, and the rocker arm moves downward to the horizontal position.
The second mode is the fully closed mode. The positions of the components in this mode are illustrated in
Figure 2b. The supply current to the coil is at its maximum, and this increases the resistance force in the MR fluid layers to its maximum level. This resistance force stops the distribution of the lift force, and all the lift force from the rocker is transferred to the buffer spring, meaning that the valve lift is zero.
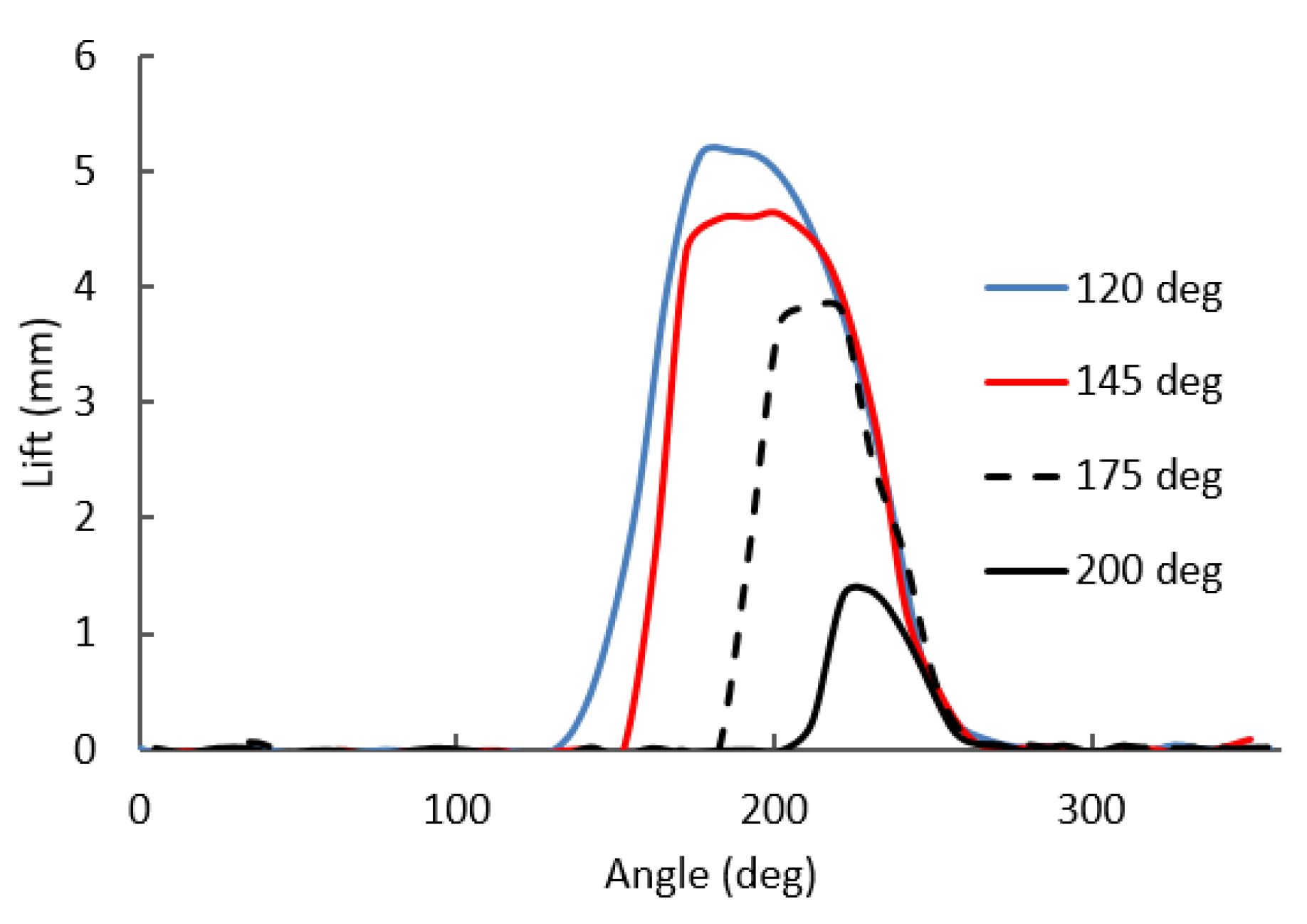
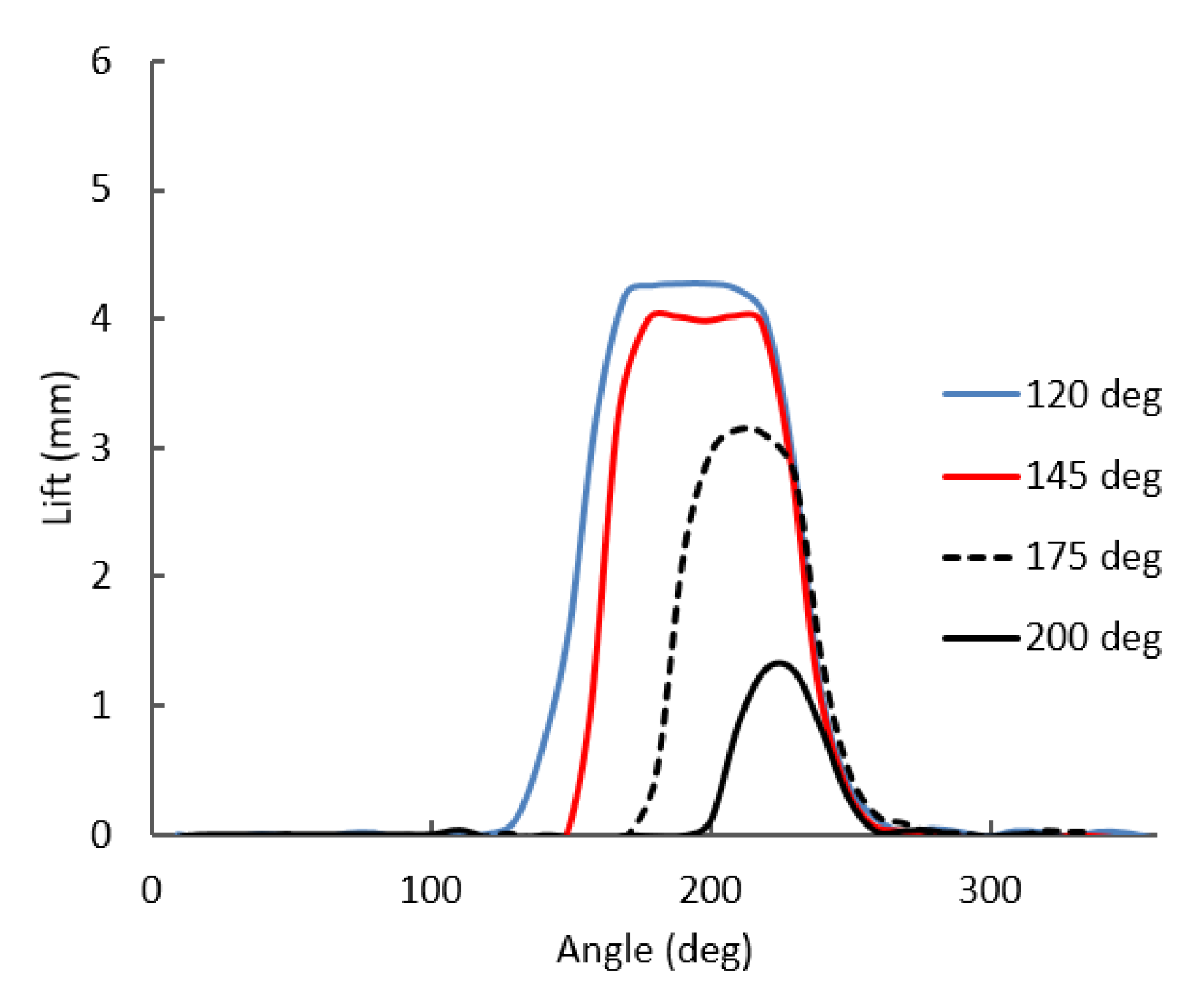
Finally, in the partially open mode, the valve lift can be controlled by varying the magnitude of the supply current. The supply current generates a magnetic field, which changes the resistance of the MR fluid in the plate block. At this point, the degree to which the valve is open is proportional to the magnitude of the resistance force in the MR fluid.
Figure 2c illustrates the partially lifted mode.
In this manner, VVL can be realized. Moreover, by varying the time at which the current is applied, the valve opening time can be varied. However, this device cannot be used to vary the timing of the valve closing. The MR fluid used in this device is MRF-140CG (Lord Corporation, Cary, NC, USA), which is a well-known high-grade MR fluid. Its operating temperature is −40 to 130 °C, its liquid viscosity at 40 °C is 0.280 Pa·s, density is 3.74 g/cm
3, and its flashpoint is higher than 150 °C [
19]. MRF-140CG offers high resistance against particle sedimentation, meaning that it produces less sediment during short-time idle situations compared with other MR fluids. Moreover, any sedimented iron particles can be easily dispersed within a few running cycles.
3. Magnetic and Thermal Studies
The heart of this new valve is the magnetic plate block, and within this block, the required resistance force of the MR fluid depends on the current flowing through the magnetic coil. Owing to the electrical resistivity of the magnetic coil, some energy is dissipated as heat. This dissipated heat increases the device’s temperature, which, in turn, affects the resistance of the coil and properties of the MR fluid. Therefore, an electromagnetic analysis and heat transfer analysis is needed to understand the performance of the proposed MR valve, and these two aspects of physics must be interlinked. For this reason, the magnetic plate block was analyzed and optimized in this study by performing a coupled magnetic and thermal multiphysics analysis. An early physics concept that relates electrical and thermal fields through a simple equation is the Joule-heating effect [
20]:
This equation could be used to determine the
, i.e., the amount of heat generated by a coil, where
is the electrical current,
is resistance in the coil, and
is time. Then, the energy balance equation could be used to determine the temperatures in the system (Equation (2)) [
21].
where
,
and
are the mass density, specific heat, and thermal conductivity of the medium respectively, and
is the temperature gradient. The concept of linear resistivity in metals could be used to obtain the relationship between the temperature and resistance of the coil. According to this concept, the resistivity of the conductor (
depends on the surrounding temperature as expressed in Equation (3) [
21].
where
is the reference temperature,
is the reference resistivity, and α is the resistivity temperature coefficient. By using the three presented equations, the aforementioned two-way coupled analysis could be performed.
COMSOL Multiphysics GUI software was used to perform the two-way coupled magnetic field and thermal analysis. A three-dimensional model of the magnetic plate block was built, governing equations were incorporated, and simulations were conducted. The magnetic field simulation results were used to determine the shear stress in the MR fluid by using an empirical equation (Equation (4)).
where
τy is the yield stress of the MR fluid under the action of a magnetic field and
B is the magnetic flux density. Finally, the resistance force of the MR block (
was calculated using Equation (5).
where
n is the number of thin plates in MR block around which MR fluid flows, the MR fluid chaining force
is expressed as in Equation (6), and the viscous damping force (
is expressed as in Equation (7).
where the design factors
L and
w denote the height and width of the magnetic core, respectively;
h is the thickness of the MR fluid layer;
is the effective area of the upper piston;
is the liquid flow rate. The value of the parameter
ranged between 2.07 and 3.07, and it was determined using Equation (8).
In Equation (8),
μ denotes the viscosity coefficient of the MR fluid, and
k was computed using Equation (9).
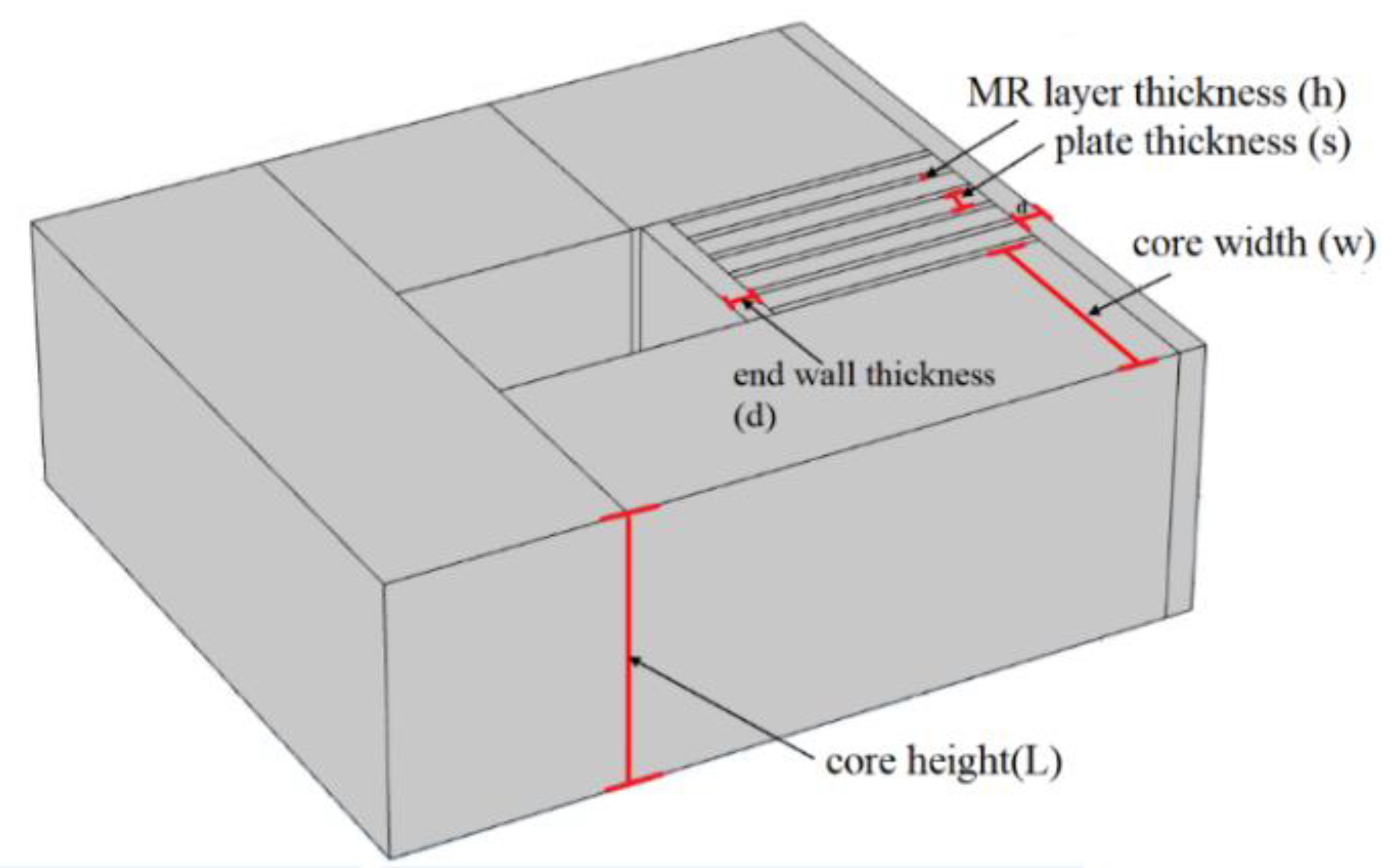
According to Equation (6), the required resistance force depends on the magnetic field and design factors. Because of the restrictions on the engine’s volume and the temperature limit of the MR fluid, the maximum possible resistance force had to be achieved with the smallest possible device size and lowest possible temperature. The input current, magnetic core channel material, and design factors such as the magnetic core area (A = w L), MR fluid layer thickness (h), partition plate thickness (s), and end wall thickness (d) were the major factors considered for minimizing the device size and temperature without compromising its resistance force. These dimensions were optimized by performing simulations. Owing to design limitations, standard optimization techniques could not be employed. Therefore, the following local optimization procedure was used. To determine the maximum possible temperature, steady-state analysis was performed in this multiphysics simulation.
First, the thicknesses of the MR layer and the partition plate were optimized. The resistance offered by the MR fluid layer is inversely proportional to its thickness. However, if the MR fluid layer is too thin, the MR fluid cannot pass, and the plates come into direct contact with each other. This creates excessive resistance, thereby preventing plate movement. Therefore, the thickness of the MR fluid layer was set to 1 mm. Similarly, the resistance force is inversely proportional to the separator thickness. However, the separator plates should have a certain minimum thickness to prevent their deformation. Therefore, the separator plate thickness was set to 3 mm. To increase the resistance offered by the valve, a large number of layers are needed. However, the cylinder head limits the available space for the number of layers, and it depends on the thickness of the MR layer and the partition plate. Finally, in the existing limited volume, six MR layers and five partition plates with the best possible thicknesses were used in the proposed design, as illustrated in
Figure 3.
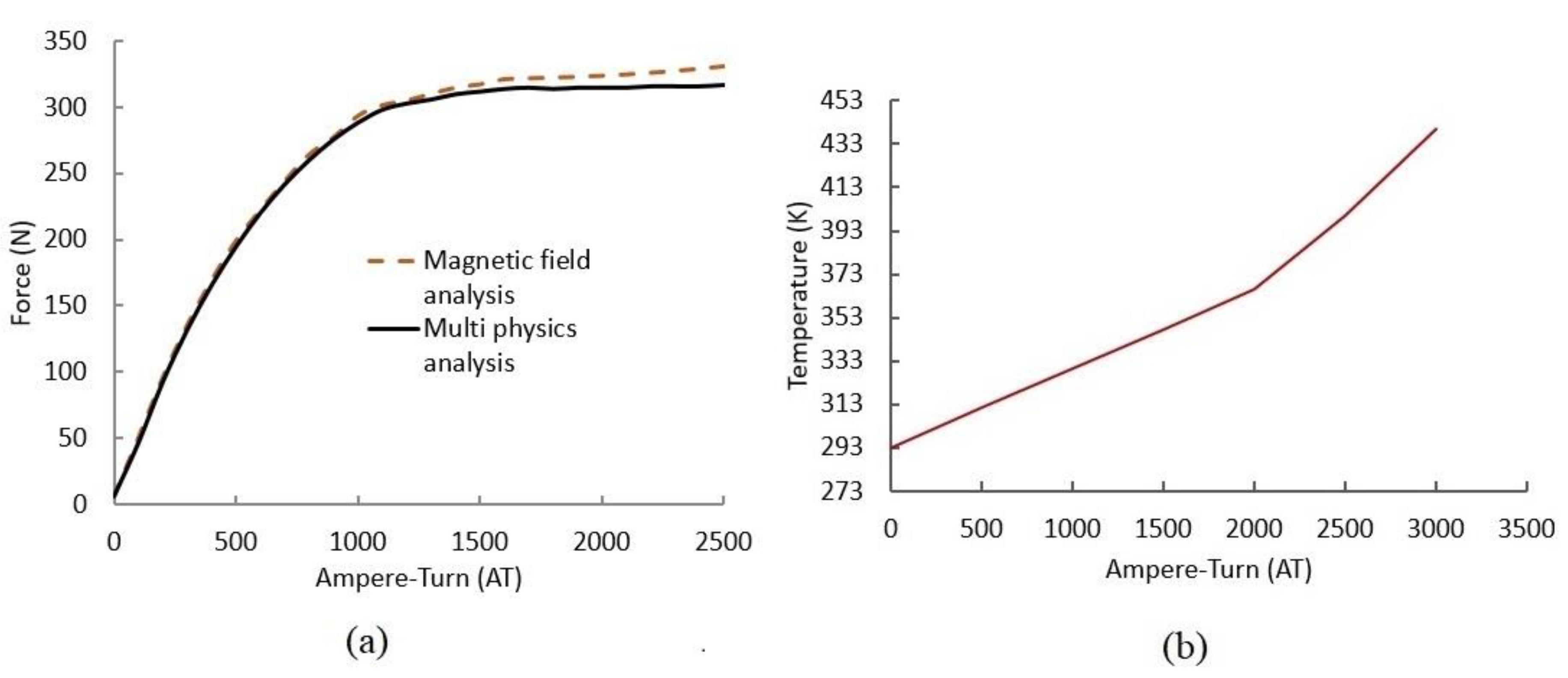
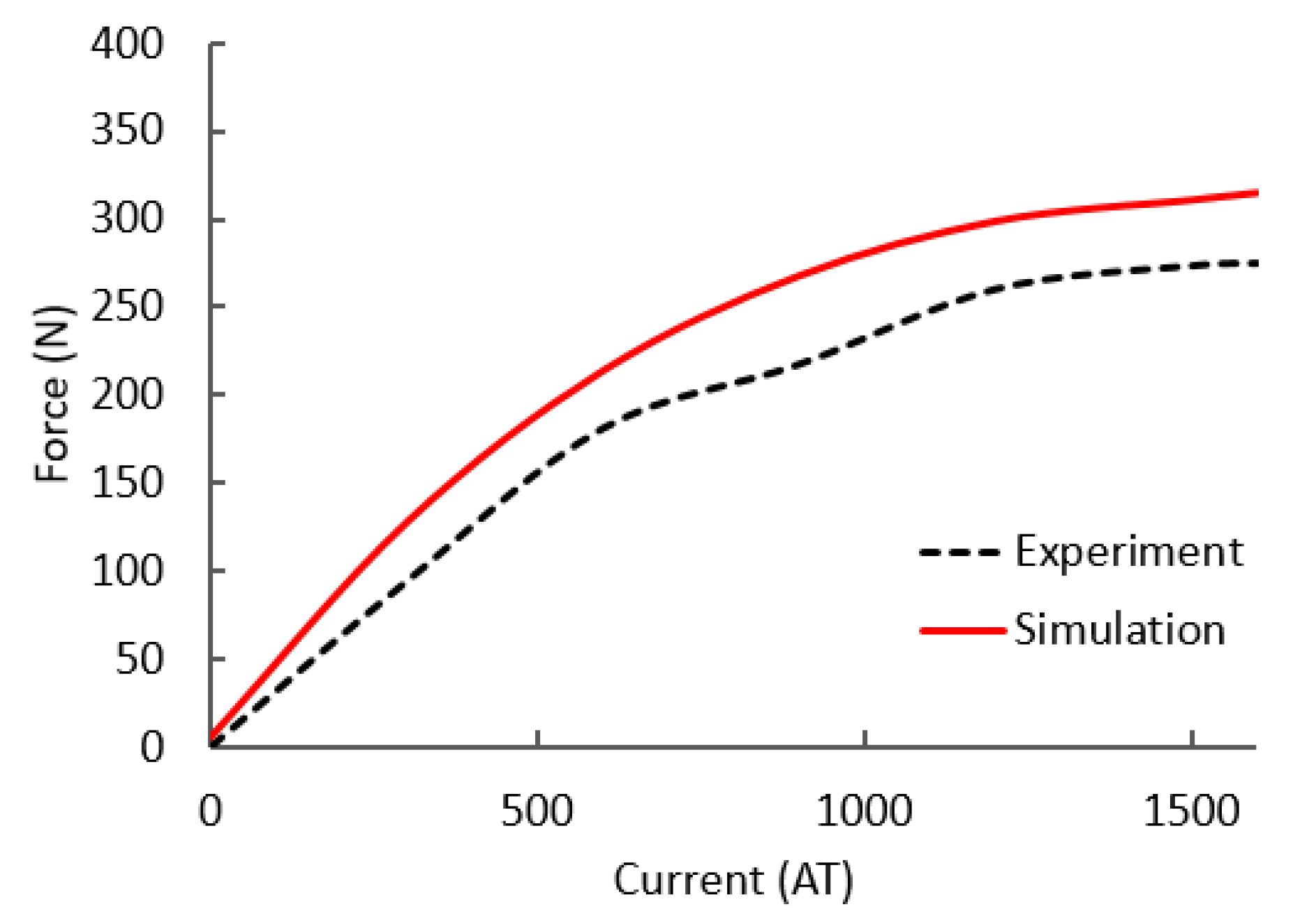
Second, the maximum possible input current was estimated. Magnetic materials reach saturation at the maximum possible input supply. This affects the magnetic field and, eventually, the resistance force. The input supply is the product of the applied current and number of turns. For the selected coil wire, the maximum supply was 2 A. Therefore, it was important to identify the number of coil turns (T) that would achieve the maximum torque.
Figure 4 shows the resistance force and MR layer temperature corresponding to different numbers of ampere-turns (ATs). The multiphysics simulation results were more accurate than those of the conventional magnetic field simulations because the multiphysics simulation considered the effects of working temperature on coil resistivity. Especially at higher input ATs, the multiphysics simulation yielded more accurate results, as depicted in
Figure 4a. The maximum force was reached when the magnetic flux channel was magnetically saturated. For this reason, after 1500 AT, the resistance force did not increase.
Moreover, the slope of the temperature rise in
Figure 4b increases after 2000 AT. This is because the heat generated by the coil was considerably higher than the heat transferred to the surrounding. Therefore, 1500 AT—750 coil turns—is appropriate for this device.
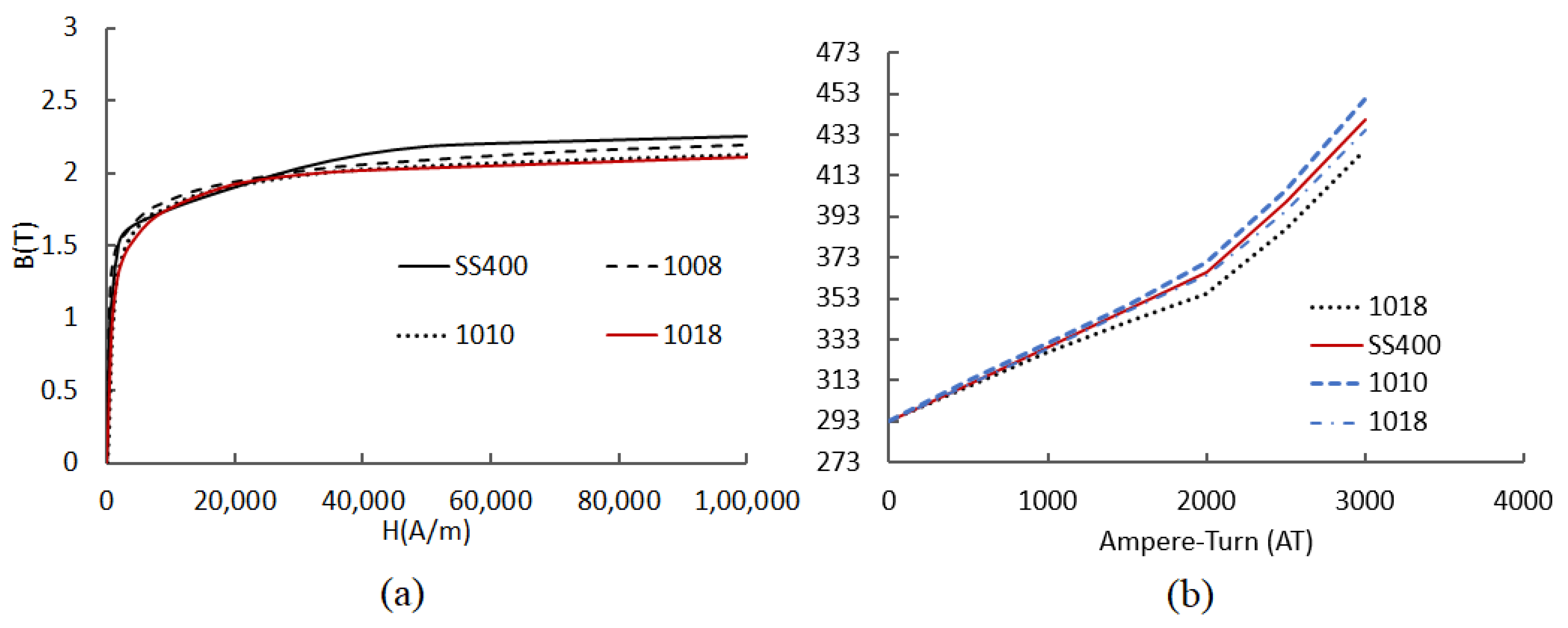
Third, the magnetic core channel material was selected. It was decided that this material must have high magnetic permeability and favorable thermal conductivity. In this study, steel alloys, including AISI1010 containing 0.1% carbon, AISI 1008 containing 0.08% carbon, and AISI 1018 containing 0.18% carbon, as well as SS400 containing 0.15–0.2% carbon, were used. By considering the magnetic permeability properties depicted in
Figure 5a, temperature conditions depicted in
Figure 5b, and suggestions from various manufacturers, SS400 was finally selected as the study material.
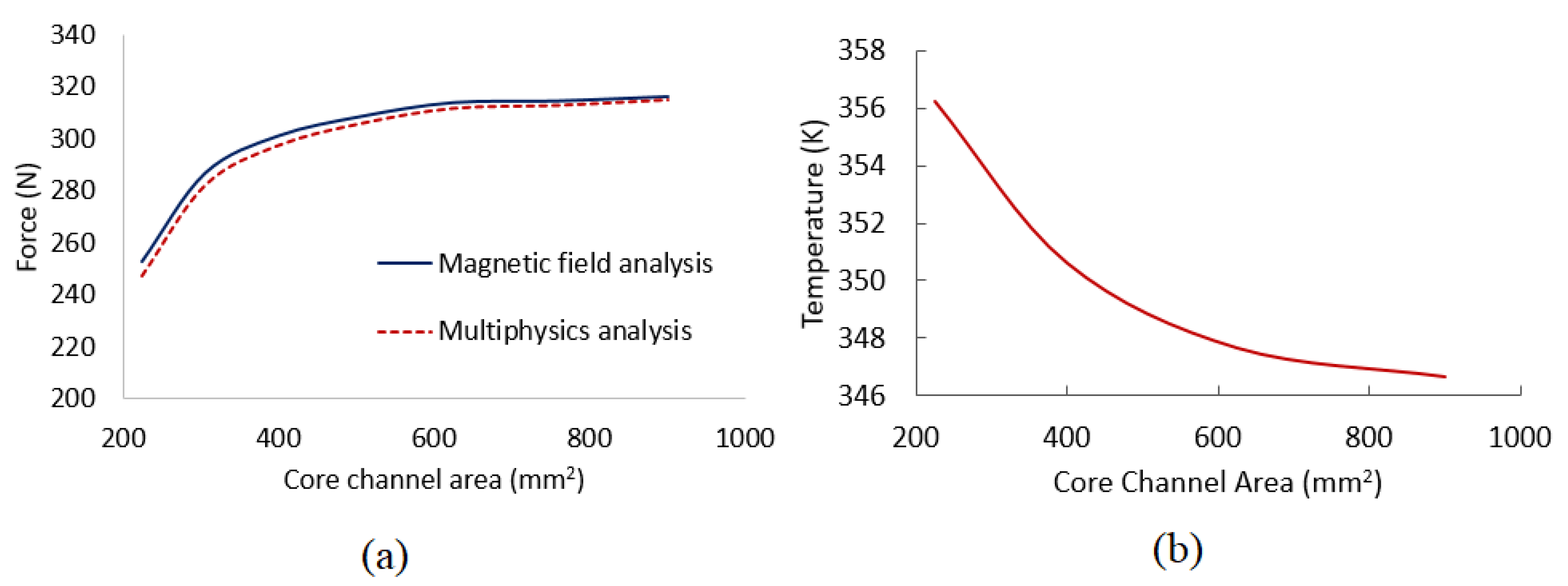
Then, the optimal magnetic core area (
A) was estimated. This area must be less than the available space for the valve train in the engine, that is, 900 mm
2.
Figure 6 shows an analysis of the effects of the channel area on the output force and temperature of the device. According to
Figure 6a, the smaller the area, the lower the resistance force. However, for areas exceeding 625 mm
2, this relationship was found to be weak; for example, the force generated with the channel area of 625 mm
2 was 99.28% of the force with the channel area of 900 mm
2. By contrast, as illustrated in
Figure 6b the temperature of the MR fluid was lower when the area was larger, which facilitated more heat transfer. However, this drop was not considerable for areas larger than 700 mm
2. Therefore, 625 mm
2 was set as the optimal dimension of the proposed device. By performing simple magnetic simulations and multiphysics simulations, the output force could be estimated. As depicted in
Figure 6a, the difference between these two types of simulation results was not substantial. However, this difference was marginally larger when the channel area was smaller, owing to the high temperature of the MR fluid.
Finally, to overcome the fluid leakage problem, the end wall was designed to block the MR fluid on both sides of the MR layer plates. Moreover, this wall improved heat transfer and reduced the temperature of the MR layer. As illustrated in
Figure 7b, as the end wall’s thickness increased, the MR fluid temperature decreased. However, as the end wall’s thickness was increased, the resistance force decreased, as illustrated in
Figure 7a. This was because the flux bypassed through this end wall. The difference in magnitude of the force for wall thicknesses of 3 and 1 mm was only 10 N. However, when the wall thickness was increased further, the resistance force decreased considerably. Therefore, 3 mm was considered to be the optimal thickness of the end wall. Both simple magnetic simulation and multiphysics simulations were performed to estimate the output force. As illustrated in
Figure 7a, when the end wall’s thickness was smaller, the values yielded by the multiphysics simulations were lower than those yielded by the normal magnetic field simulation. This was because of the high temperature in the device.
The device dimensions were optimized on the basis of the results of the multiphysics analysis; the final values are summarized in
Table 1.
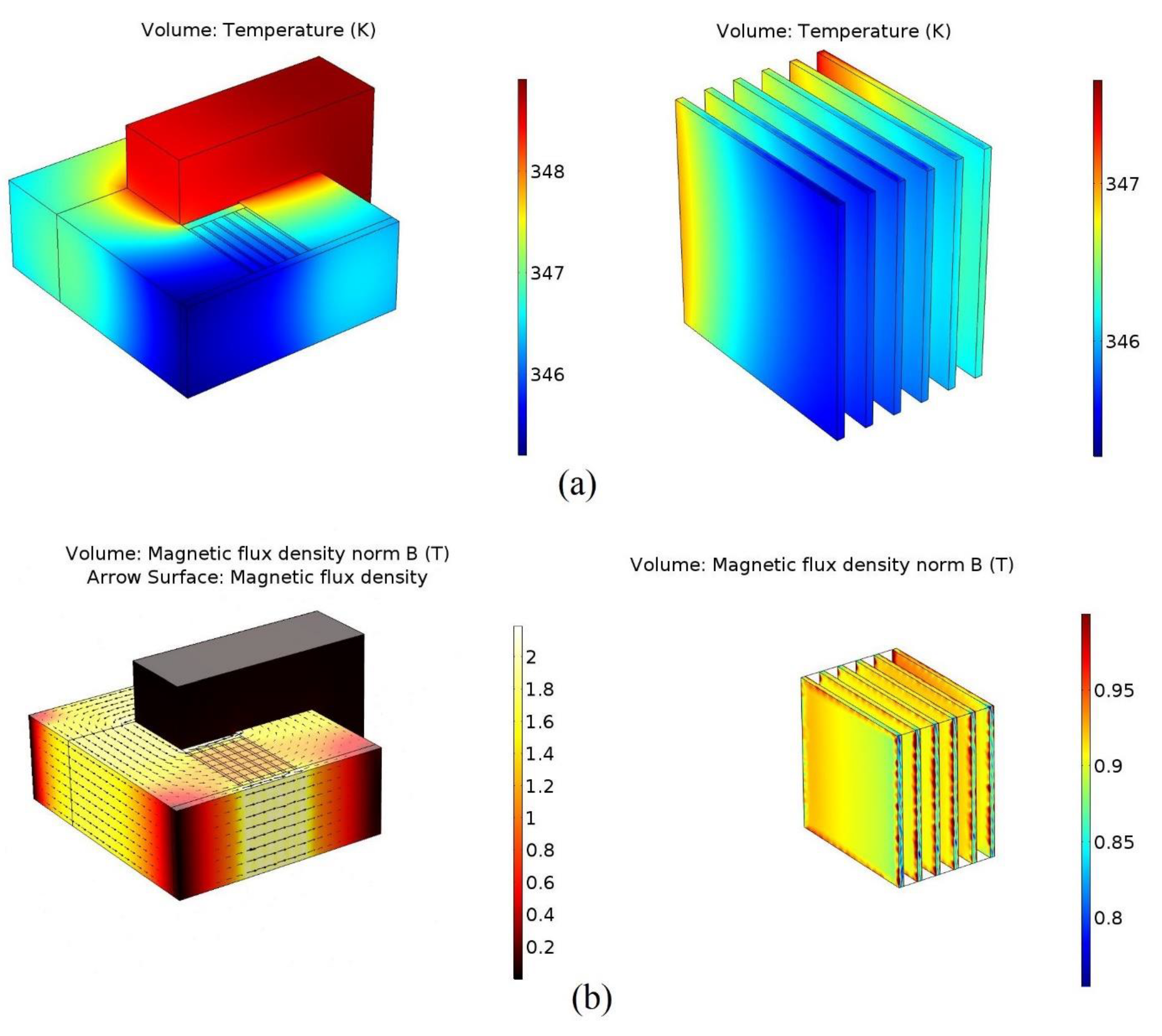
Figure 8 depicts the temperature distribution and magnetic flux density in the channel and MR layers. Even though one end of the valve was inserted in the combustion chamber, the temperature in the other end, i.e., the MR valve train side, was around 40 °C only. This is because of the engine cooling system and cool intake [
22]. With an initial temperature of 40 °C, a steady-state analysis was conducted to understand the maximum possible temperatures of the MR layers. The results indicated a rise of 35 °C and that the maximum temperature of the MR layers was 70 °C. However, this temperature did not exceed the operating limits of the MR fluid.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}