

A Maximum Power Point Tracking Control Method Based on Rotor Speed PDF Shape for Wind Turbines


Abstract
:
1. Introduction
2. Principle of MPPT Control
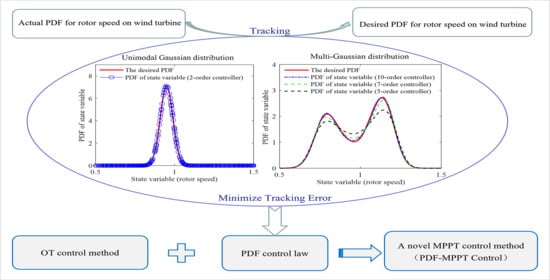
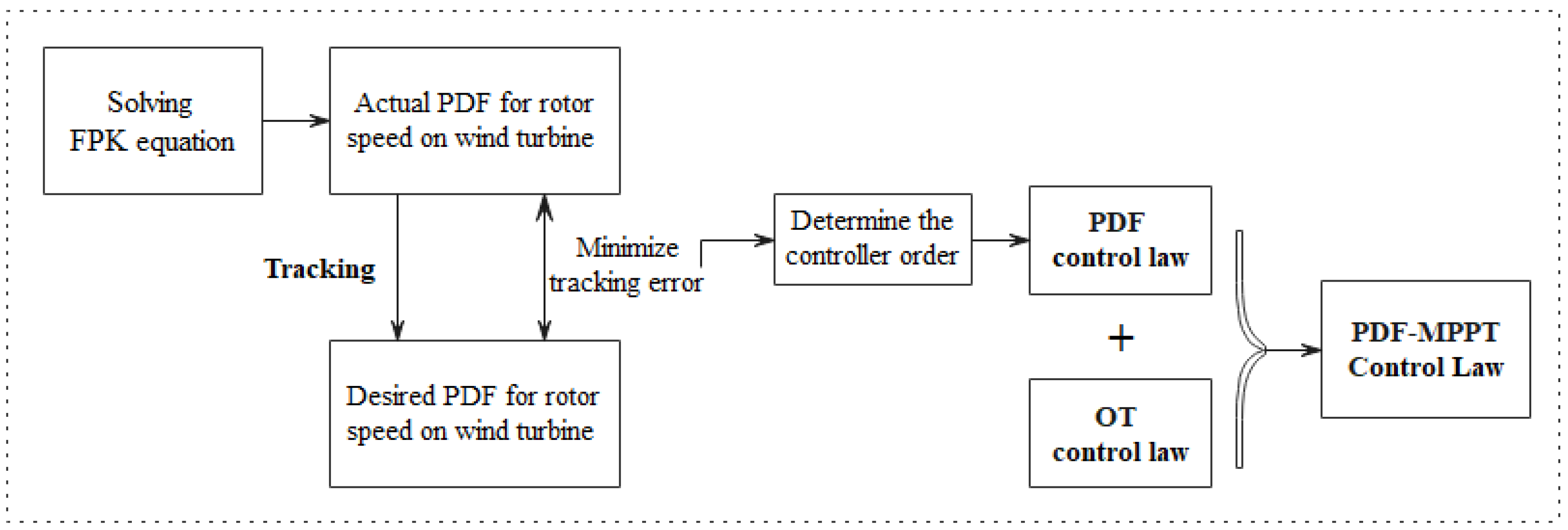
3. MPPT Control Based on PDF Shape
3.1. PDF Control Based on FPK Equation
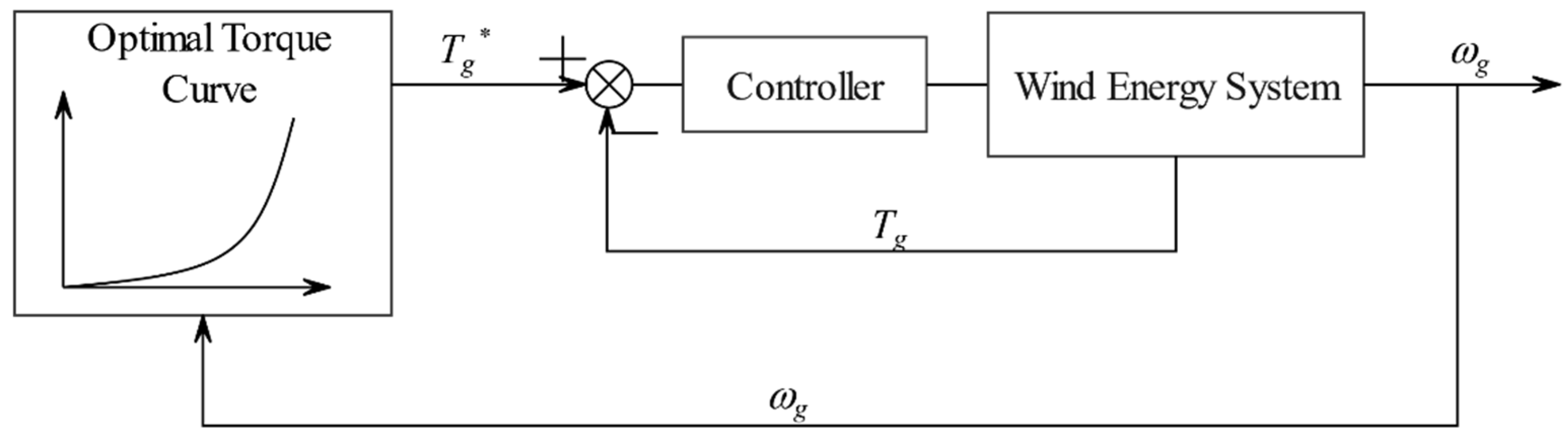
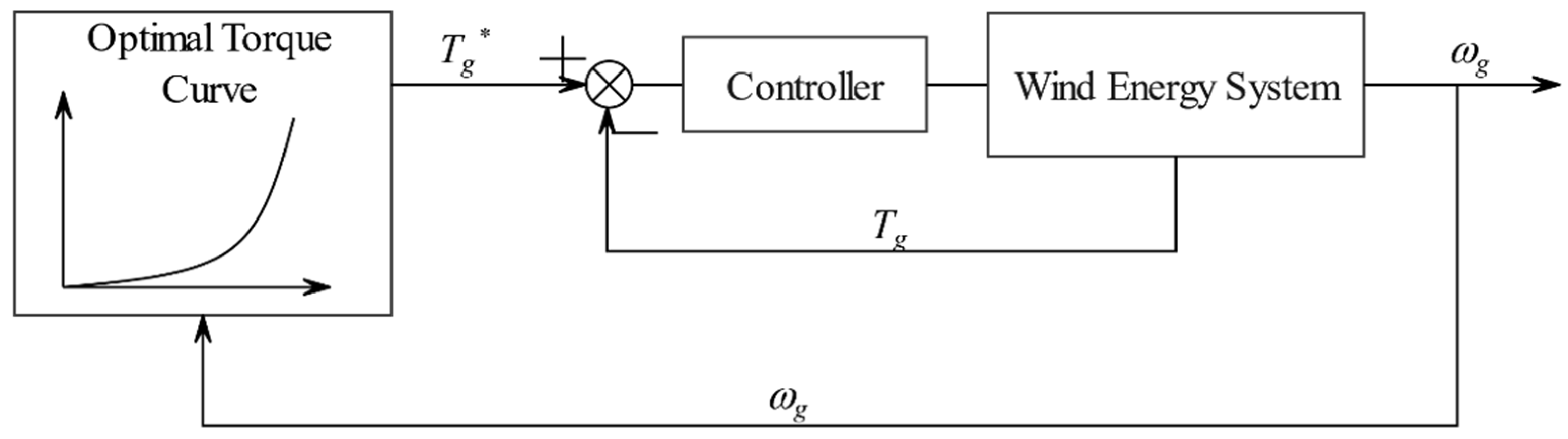
3.2. OT Control Based on PDF Shape
4. Simulation and Results
4.1. Controller Determination
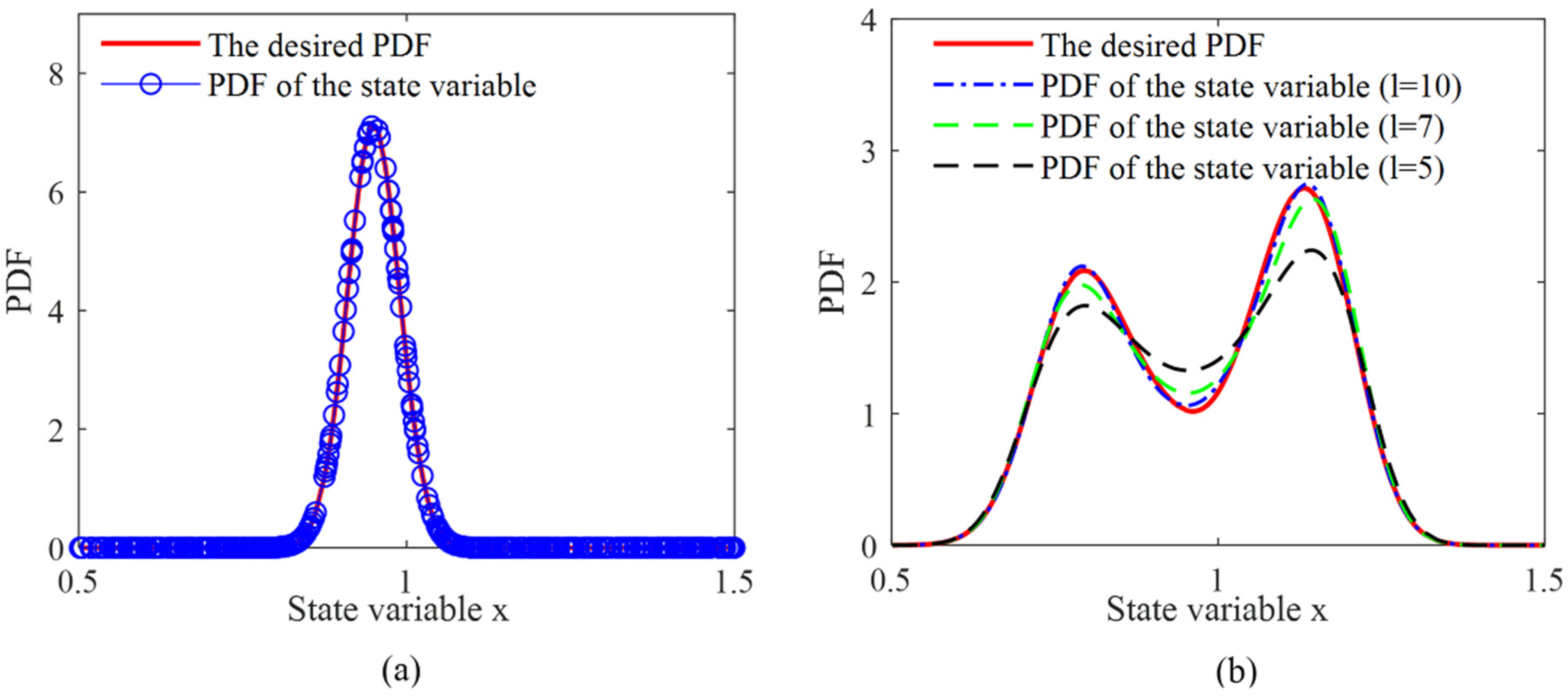
4.1.1. Goal PDF Is Gaussian Distribution
4.1.2. Goal PDF Is Multi-Gaussian Distribution
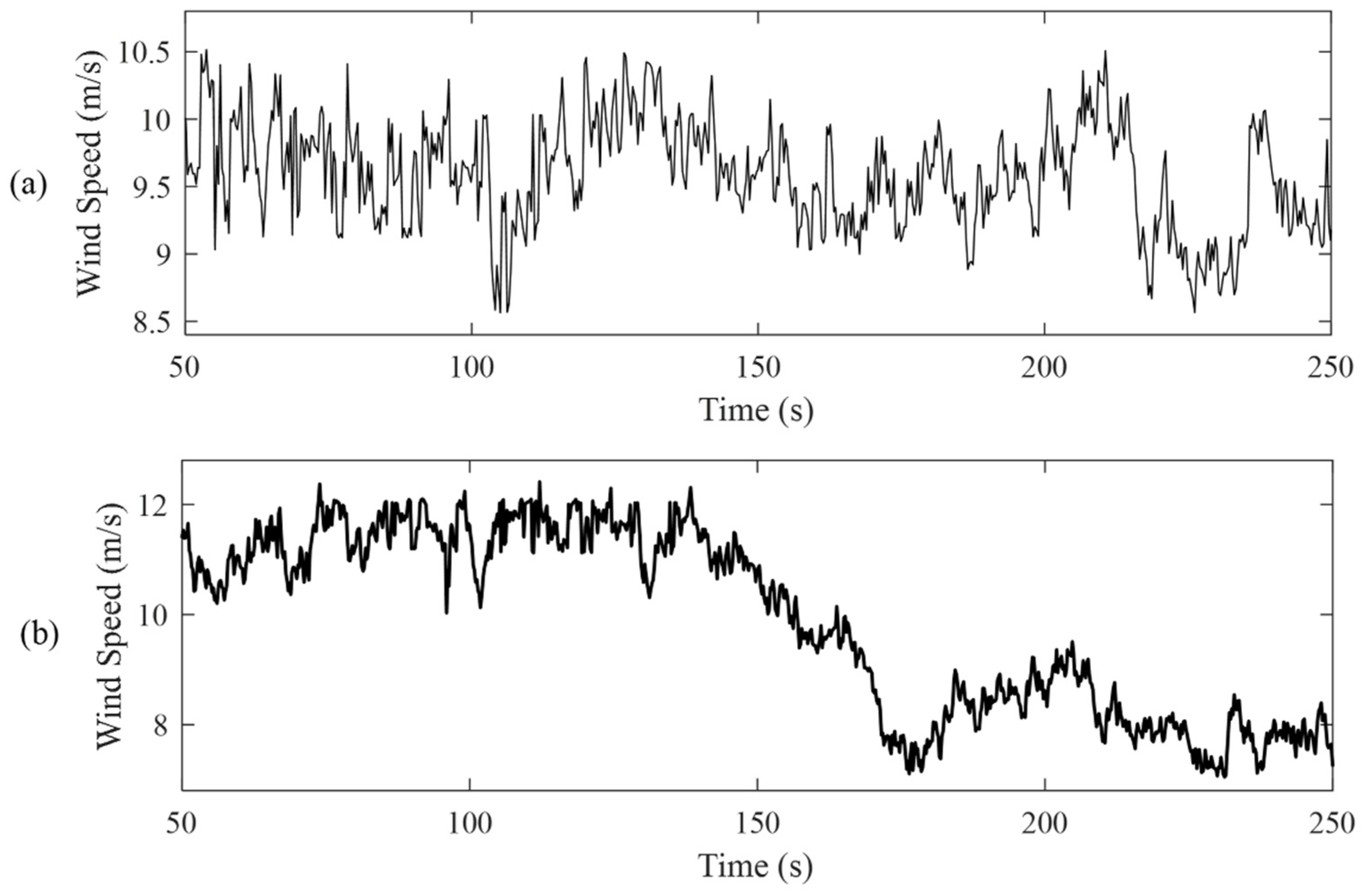
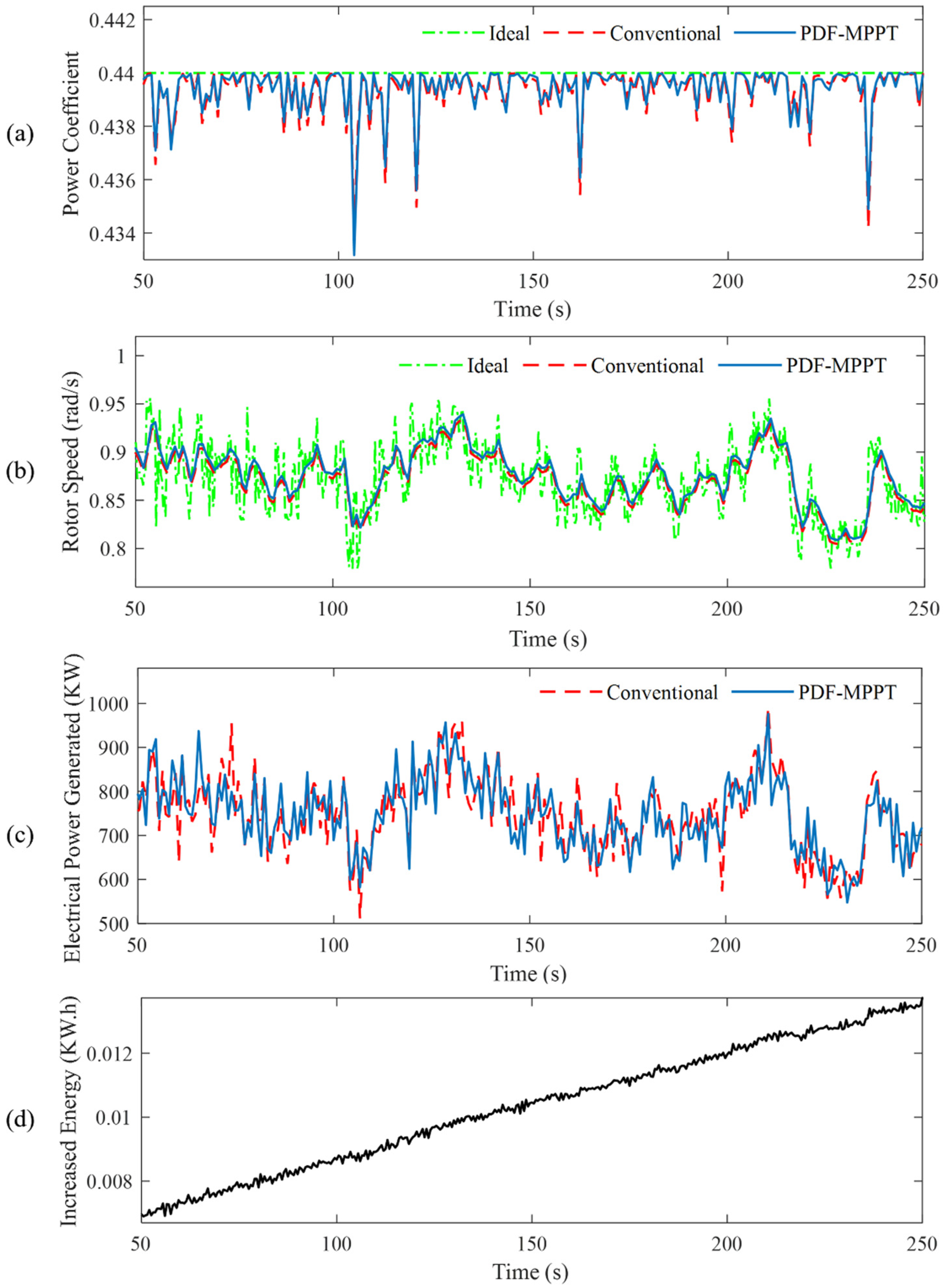
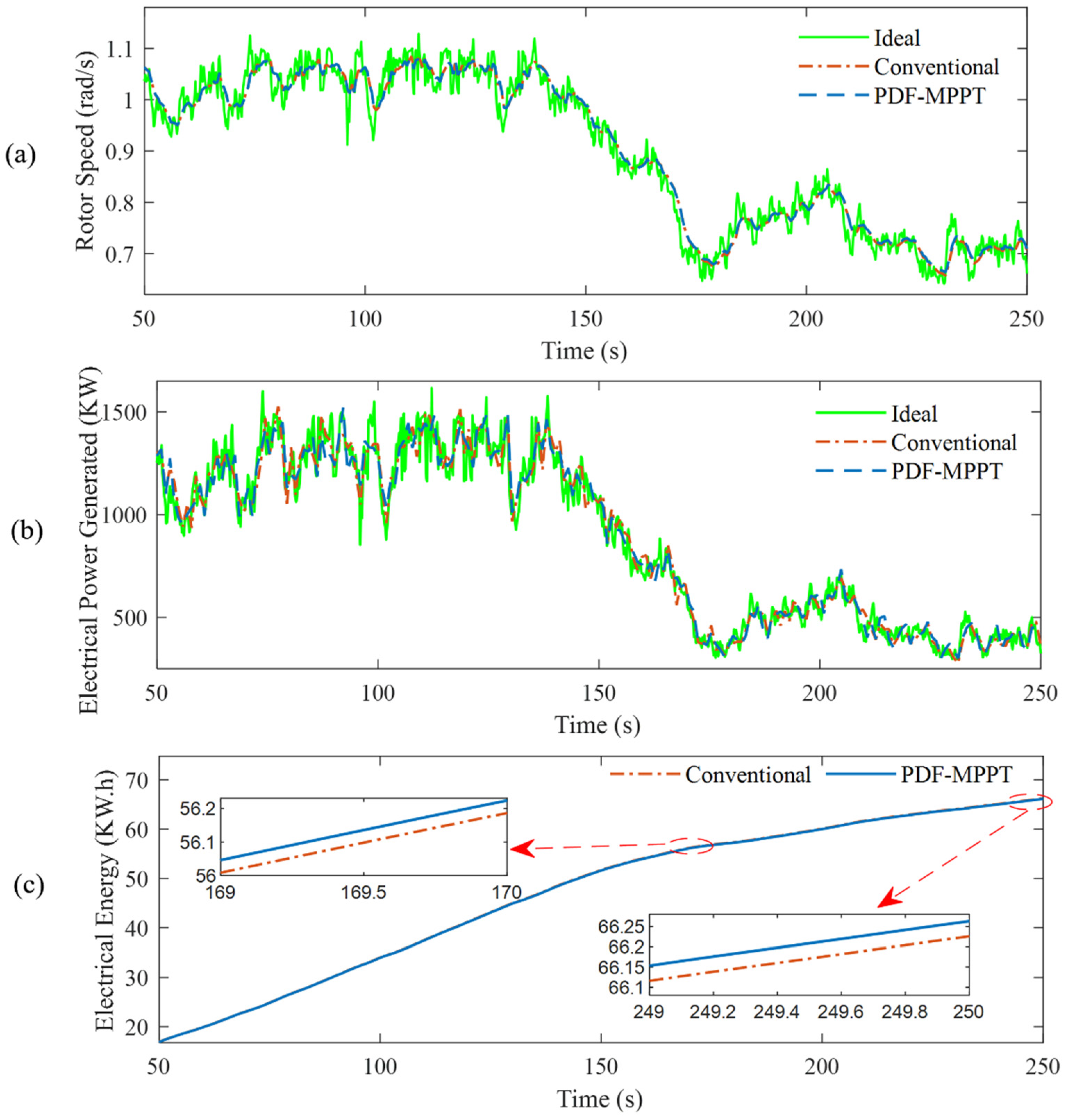
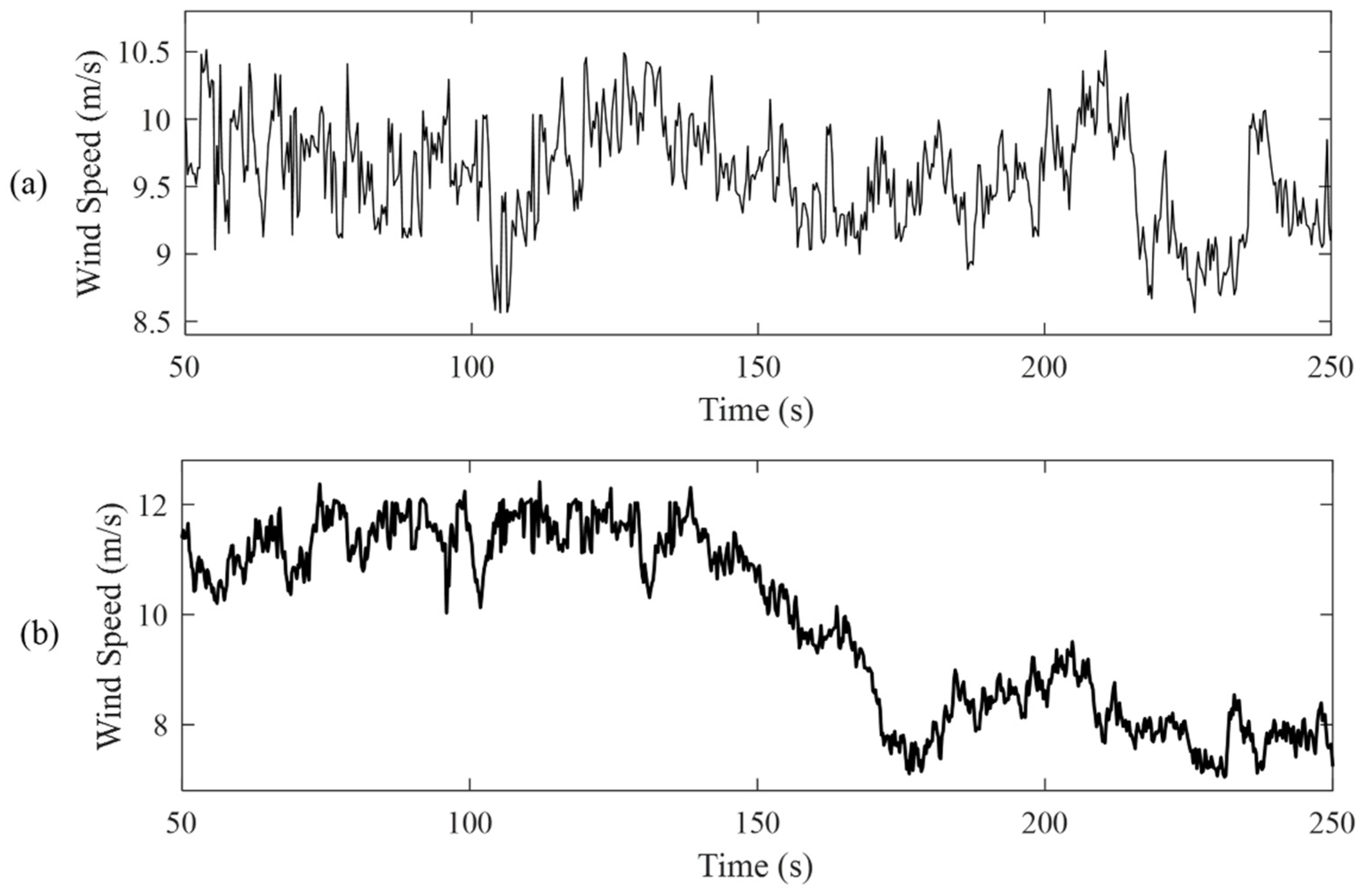
4.2. Performance Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MPPT | Maximum power point tracking |
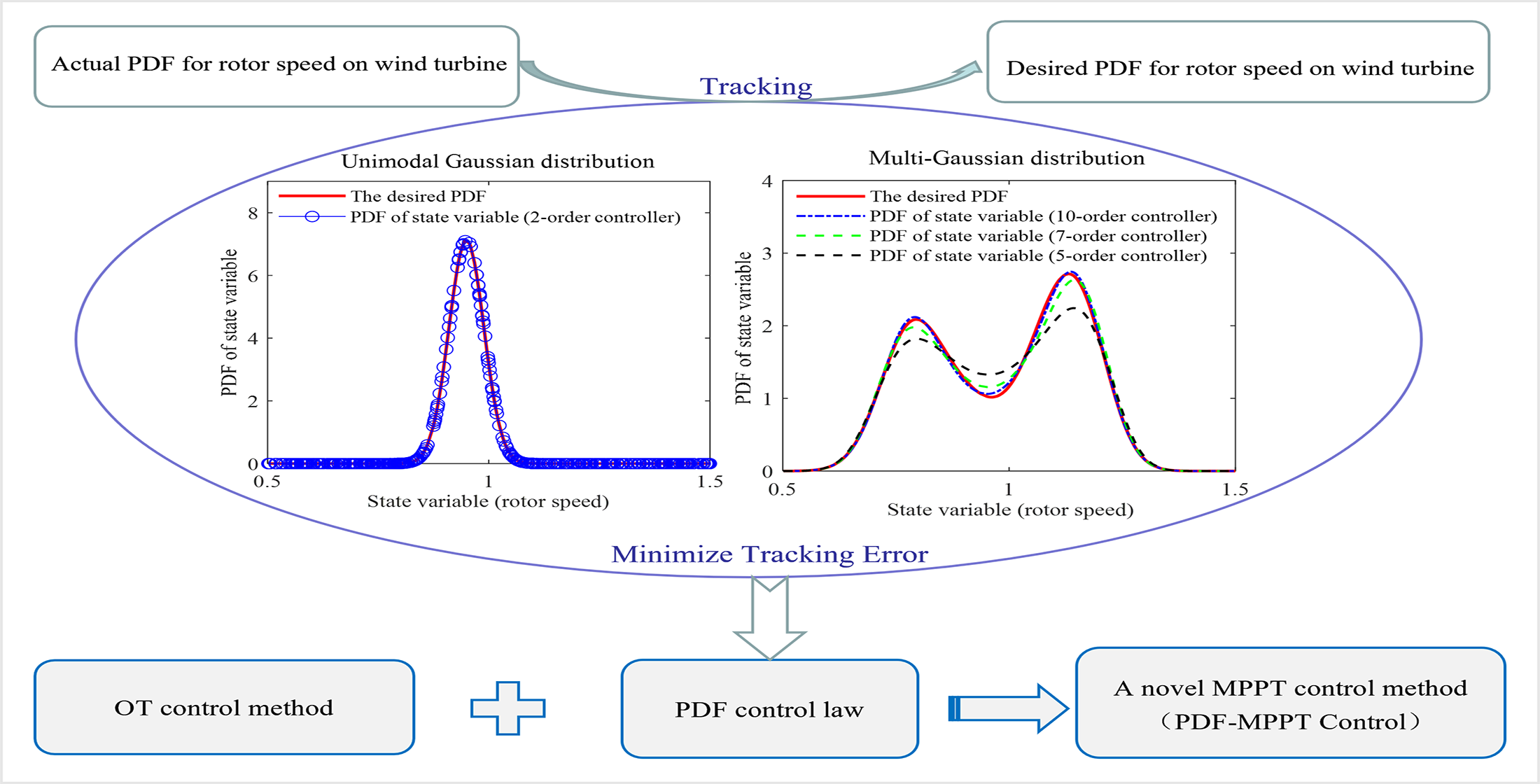
| PMSG | Permanent magnet synchronous generator |
| MPP | Maximum power point |
| LLS | Linear least square |
| FPK | Fokker-Planck-Kolmogorov |
| Probability density function | |
| HCS | Hill climbing search |
| P&O | Perturb and observe |
| PSF | Power signal feedback |
| OT | Optimal torque |
| Limited rotational speed (rad/s) | |
| Mechanical power of the turbine (W) | |
| Optimal mechanical power of the turbine (W) | |
| Mechanical torque of the turbine (N·m) | |
| Optimal mechanical torque of the turbine (N·m) | |
| Electromagnetic torque of the turbine (N·m) | |
| Reference electromagnetic torque of the turbine (N·m) | |
| Optimum torque coefficient | |
| Air density (kg/m3) | |
| Radius of the wind wheel (m) | |
| Incoming wind speed (m/s) | |
| , TSR | Blade tip speed ratio |
| Optimal tip speed ratio | |
| Pitch angle (degree) | |
| Maximum power coefficient of wind turbine | |
| Power coefficient of wind turbine | |
| Estimated value of blade tip speed ratio | |
| Estimated value of aerodynamic torque (N·m) | |
| Estimated value of power coefficient | |
| Estimated value of aerodynamic torque coefficient | |
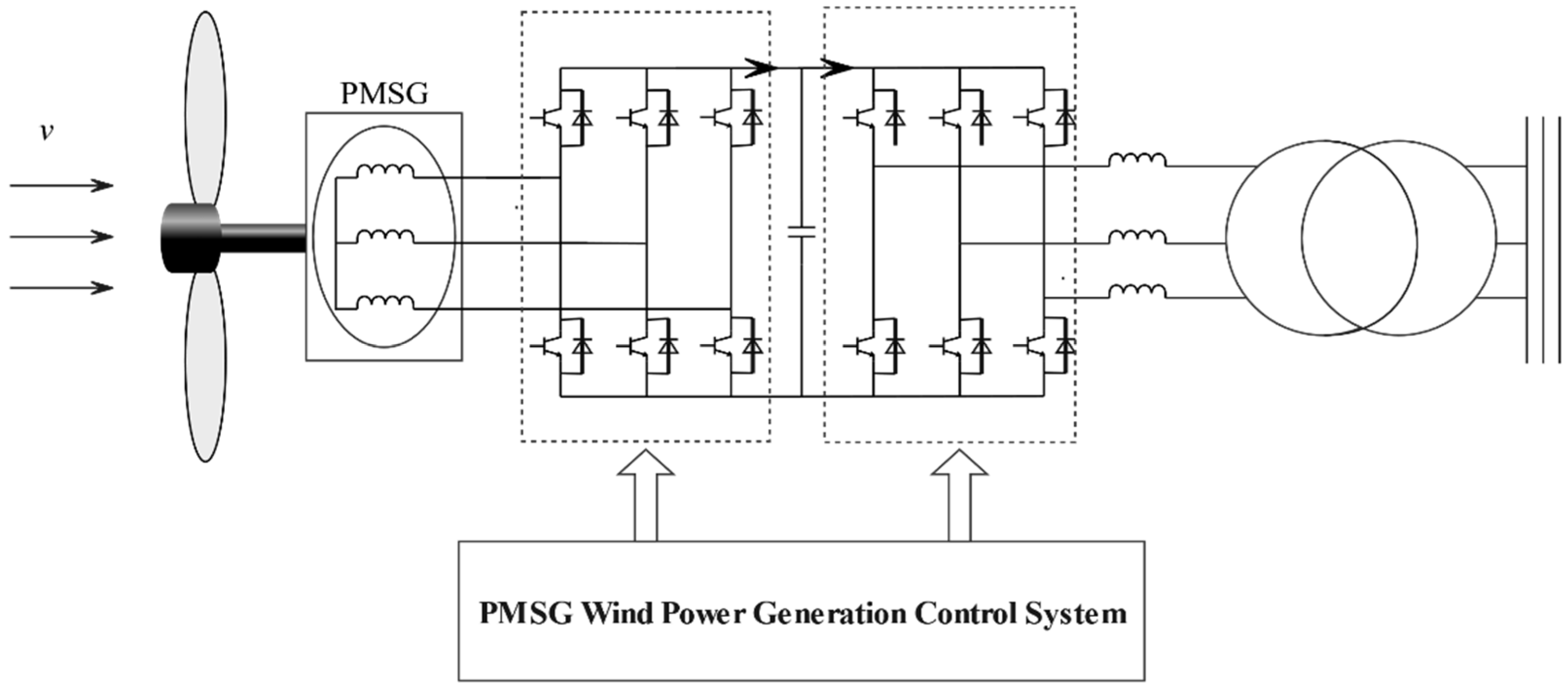
| Rotor speed of turbine (rad/s) | |
| Rotor speed of generator (rad/s) | |
| Moment of inertia of the wind turbine (kg·m2) | |
| Stiffness of rotor (N·m/rad) | |
| Order of controller | |
| , | PDF of the system’s state variable |
| , | Approximate PDF solved by FPK equation |
| System status variable | |
| Initial state variable of the system | |
| System function | |
| Control function of the system | |
| Nonlinear part of the system | |
| Diffusion coefficient of stochastic dynamic equation | |
| Stochastic input vector or interference vector | |
| Power spectral density | |
| System tracking error | |
| One of the special solutions of | |
| Another special solution of | |
| Exponential term coefficient of | |
| Standard deviation of goal PDF in Gaussian distribution | |
| Expectation of goal PDF in Gaussian distribution | |
| Standard deviation of goal PDF in multi-Gaussian distribution | |
| Expectation of goal PDF in multi-Gaussian distribution | |
| Weight coefficient of goal PDF in multi-Gaussian distribution | |
| , , , | Parametric set when the order of controller is 2, 5, 7, and 10 |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | |
|---|---|
| −287.830867811171 | |
| 605.548469387750 | |
| −318.877551020403 | |
| 10−12 |
| Symbol | |||
|---|---|---|---|
| 343.437358775784 | −1594.96242195473 | 44,053.0770519675 | |
| −2916.47234740542 | 15,628.8031662488 | −555,794.178845216 | |
| 9268.50719205602 | −66,646.6755185373 | 3,129,757.20215828 | |
| −14,626.3291972856 | 159,037.168454648 | −10,387,780.8707534 | |
| 12,298.3354973506 | −230,585.395579082 | 22,580,716.8663499 | |
| −5270.44636019731 | 207,497.282093835 | −33,757,461.7545851 | |
| 903.311049270425 | −113,179.672382212 | 35,422,677.9179762 | |
| - | 34,259.2706841911 | −26,100,226.0937719 | |
| - | −4415.57762037512 | 13,241,365.5134282 | |
| - | - | −4,408,220.88131120 | |
| - | - | 867,399.263346549 | |
| - | - | −76,485.8611110169 |
References
- Li, J.; Wang, G.; Li, Z.; Yang, S.; Chong, W.T.; Xiang, X. A review on development of offshore wind energy conversion system. Int. J. Energy Res. 2020, 44, 9283–9297. [Google Scholar] [CrossRef]
- Ahmed, B.; Nurul, H.; Siti, Y.; Aisha, H.; Sheroz, K.; Alhareth, Z. Paper review: Maximum power point tracking for wind energy conversion system. In Proceedings of the 2020 2nd International Conference on Electrical, Control and Instrumentation Engineering (ICECIE), Kuala Lumpur, Malaysia, 28 November 2020; pp. 1–6. [Google Scholar]
- Abdullah, M.A.; Yatim, A.H.M.; Tan, C.W.; Saidur, R. A review of maximum power point tracking algorithms for wind energy systems. Renew. Sustain. Energy Rev. 2012, 16, 3220–3227. [Google Scholar] [CrossRef]
- Wang, Q.; Chang, L. An intelligent maximum power extraction algorithm for inverter-based variable speed wind turbine systems. IEEE Trans. Power Electron. 2004, 19, 1242–1249. [Google Scholar] [CrossRef]
- Hua, G.; Geng, Y. A novel control strategy of MPPT taking dynamics of wind turbine into account. In Proceedings of the 2006 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Barendse, P.; Naidoo, R.; Douglas, H.; Pillay, P. A new algorithm for improved dip/sag detection with application to improved performance of wind turbine generators. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; pp. 118–123. [Google Scholar]
- Leithead, W.E.; Connor, B. Control of variable speed wind turbines: Design task. Int. J. Control 2010, 73, 1189–1212. [Google Scholar] [CrossRef]
- Kim, K.H.; Van, T.L.; Lee, D.C.; Song, S.H.; Kim, E.H. Maximum output power tracking control in variable-speed wind turbine systems considering rotor inertial power. IEEE Trans. Ind. Electron. 2013, 60, 3207–3217. [Google Scholar] [CrossRef]
- Yenduri, K.; Sensarma, P. Maximum power point tracking of variable speed wind turbines with flexible shaft. IEEE Trans. Sustain. Energy 2016, 7, 956–965. [Google Scholar] [CrossRef]
- Yin, S.; Yu, D.; Luo, Z.; Xia, B. Unified polynomial expansion for interval and random response analysis of uncertain structure-acoustic system with arbitrary probability distribution. Comput. Methods Appl. Mech. Eng. 2018, 336, 260–285. [Google Scholar] [CrossRef]
- Li, F.; Liu, Y. General stochastic convergence theorem and stochastic adaptive output-feedback controller. IEEE Trans. Autom. Control 2017, 62, 2334–2349. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, P.; Zhao, J. Probability density function control for maximum wind energy tracking of variable speed wind turbine. In Proceedings of the 26th Chinese Process Control Conference (CPCC2015), Nangchang, China, 31 July–3 August 2015; p. 335. [Google Scholar]
- Yang, H.; Fu, Y.; Qian, F. The Probability Density Function Adjust for Uncertain Stochastic Systems. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 292–296. [Google Scholar]
- Wang, L.; Qian, F.; Liu, J. Shape control on probability density function in stochastic systems. J. Syst. Eng. Electron. 2014, 25, 144–149. [Google Scholar] [CrossRef]
- Wang, L. Research on PDF Shape Control in Non-Linear Stochastic Systems. Ph.D. Thesis, Xi’an University of Technology, Xi’an, China, 2016. [Google Scholar]
- Keighobadi, J.; KhalafAnsar, H.; Naseradinmousavi, P. Adaptive neural dynamic surface control for uniform energy exploitation of floating wind turbine. Appl. Energy 2022, 316, 119132. [Google Scholar] [CrossRef]
- Fortmann, J. Modeling of Wind Turbines with Doubly Fed Generator System; Springer Fachmedien Wiesbaden: London, UK, 2015. [Google Scholar]
- Lubosny, Z. Wind Turbine Operation in Electric Power Systems; Springer: London, UK, 2010. [Google Scholar]
- Morimoto, S.; Nakayama, H.; Sanada, M.; Takeda, Y. Sensorless output maximization control for variable-speed wind generation system using IPMSG. IEEE Trans. Ind. Appl. 2005, 41, 60–67. [Google Scholar] [CrossRef]
- Tan, K.; Islam, S. Optimum control strategies in energy conversion of PMSG wind turbine system without mechanical sensors. IEEE Trans. Energy Convers. 2004, 19, 392–399. [Google Scholar] [CrossRef]
- Qi, L.; Zheng, L.; Bai, X.; Chen, Q.; Chen, Y.J.A.S. Nonlinear Maximum Power Point Tracking Control Method for Wind Turbines Considering Dynamics. Appl. Sci. 2020, 10, 811. [Google Scholar] [CrossRef] [Green Version]
- Hao, X.; Shi, N.; Gao, C. Application of fuzzy-neural network control in wind power system. Inf. Technol. Netw. Secur. 2010, 29, 91–96. [Google Scholar]
- Wang, T.; Li, L.; Xu, J.; Tan, J.; Wang, X. Adaptive control for the maximum power point tracking of wind energy conversion system considering torque loss. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 7116–7120. [Google Scholar]
- Dang, D.Q.; Wu, S.; Wang, Y.; Cai, W. Model predictive control for maximum power capture of variable speed wind turbines. In Proceedings of the 2010 Conference Proceedings IPEC, Singapore, 27–29 October 2010; pp. 274–279. [Google Scholar]
- Alsumiri, M.A.; Tang, W.H.; Wu, Q.H. Maximum power point tracking for wind generator system using sliding mode control. In Proceedings of the 2013 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Taichung, Taiwan, 18–20 June 2013; pp. 1–6. [Google Scholar]
- Chiu, C.S.; Chiang, T.S.; Chou, M.L.; Hung, W.J.; Lin, J.H. Maximum power point tracking of wind power systems via fast terminal sliding mode control. In Proceedings of the 11th IEEE International Conference on Control & Automation (ICCA), Hong Kong, China, 8–11 December 2014; pp. 809–814. [Google Scholar]
- Petrila, D.; Blaabjerg, F.; Muntean, N.; Lascu, C. Fuzzy logic based MPPT controller for a small wind turbine system. In Proceedings of the 2012 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 24–26 May 2012; pp. 993–999. [Google Scholar]
- Chen, Q.; Meng, T.; Ji, Z.C. Robust control based on quantitative feedback theory for PMSG wind power generation system. In Proceedings of the 2009 Chinese Control and Decision Conference, Guilin, China, 17–19 June 2009; pp. 2122–2127. [Google Scholar]
- Wang, H. Bounded Dynamic Stochastic Systems: Modeling and Control; Spring: London, UK, 2000. [Google Scholar]
- Yue, H.; Wang, H. Minimum entropy control of closed-loop tracking errors for dynamic stochastic systems. IEEE Trans. Autom. Control 2011, 48, 118–122. [Google Scholar]




| Name | Symbol | Value | Unit |
|---|---|---|---|
| Rotor radius | 33.05 | m | |
| Stiffness of rotor | 48,376 | N·m/rad | |
| The moment inertia of rotor | 35,000 | kg·m2 | |
| nominal voltage | 575 | V | |
| nominal frequency | 60 | Hz | |
| Number of poles | 48 | ||
| Stator resistance | 0.027 | pu | |
| Stator inductance | 0.5131 | pu | |
| Flux induced by magnets | 1.18842 | pu | |
| Air density | 1.12 | kg/m3 | |
| Rated power | 1.5 | MW | |
| Rated wind speed | 12.1 | rad/s | |
| Rated rotor speed | 1.1 | rad/s | |
| Pitch angle | 0 | ||
| Optimum TSR | 10.5 | ||
| Maximum power coefficient | 0.44 |
| Parameter | = 1 | = 2 | = 3 | = 4 |
|---|---|---|---|---|
| 1.16800 | 1.61300 | 1.89800 | 0.95800 | |
| 1.17100 | 0.77670 | 1.10300 | 0.89170 | |
| 0.08411 | 0.09418 | 0.10170 | 0.12660 |
| Controller Order | Tracking Error | |
|---|---|---|
| 5 | 0.0342 | |
| 7 | 0.0071 | |
| 10 | 0.0010 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, Z.; Jia, J.; Zheng, L. A Maximum Power Point Tracking Control Method Based on Rotor Speed PDF Shape for Wind Turbines. Appl. Sci. 2022, 12, 9108. https://doi.org/10.3390/app12189108
Zhang X, Zhang Z, Jia J, Zheng L. A Maximum Power Point Tracking Control Method Based on Rotor Speed PDF Shape for Wind Turbines. Applied Sciences. 2022; 12(18):9108. https://doi.org/10.3390/app12189108
Chicago/Turabian StyleZhang, Xinge, Zhen Zhang, Junru Jia, and Liming Zheng. 2022. "A Maximum Power Point Tracking Control Method Based on Rotor Speed PDF Shape for Wind Turbines" Applied Sciences 12, no. 18: 9108. https://doi.org/10.3390/app12189108
APA StyleZhang, X., Zhang, Z., Jia, J., & Zheng, L. (2022). A Maximum Power Point Tracking Control Method Based on Rotor Speed PDF Shape for Wind Turbines. Applied Sciences, 12(18), 9108. https://doi.org/10.3390/app12189108