
A Quasi-Static Motion Prediction Model of a Multi-Hull Navigation Vessel in Dynamic Positioning Mode


Abstract
:1. Introduction
2. Maritime Navigation Vessel
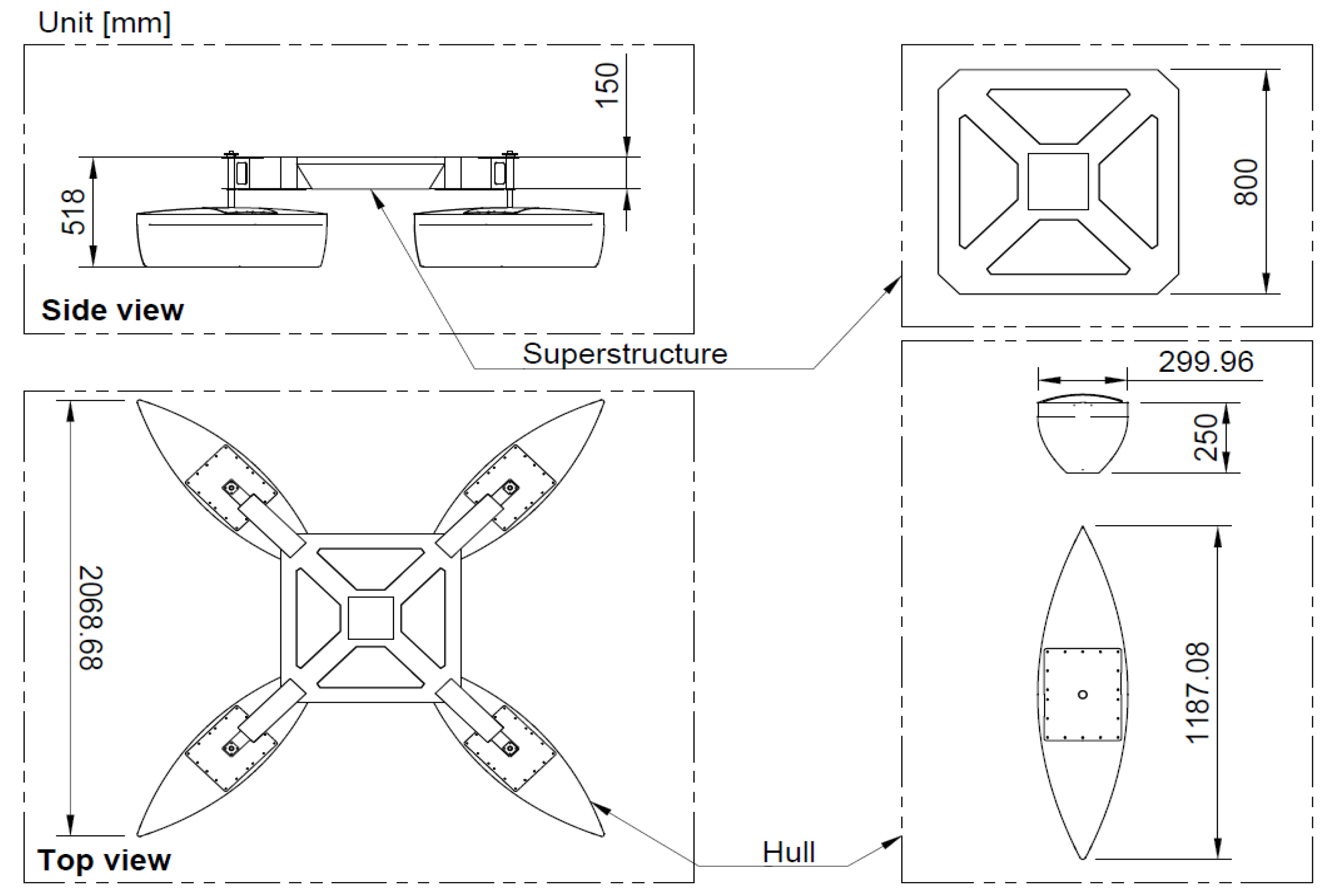
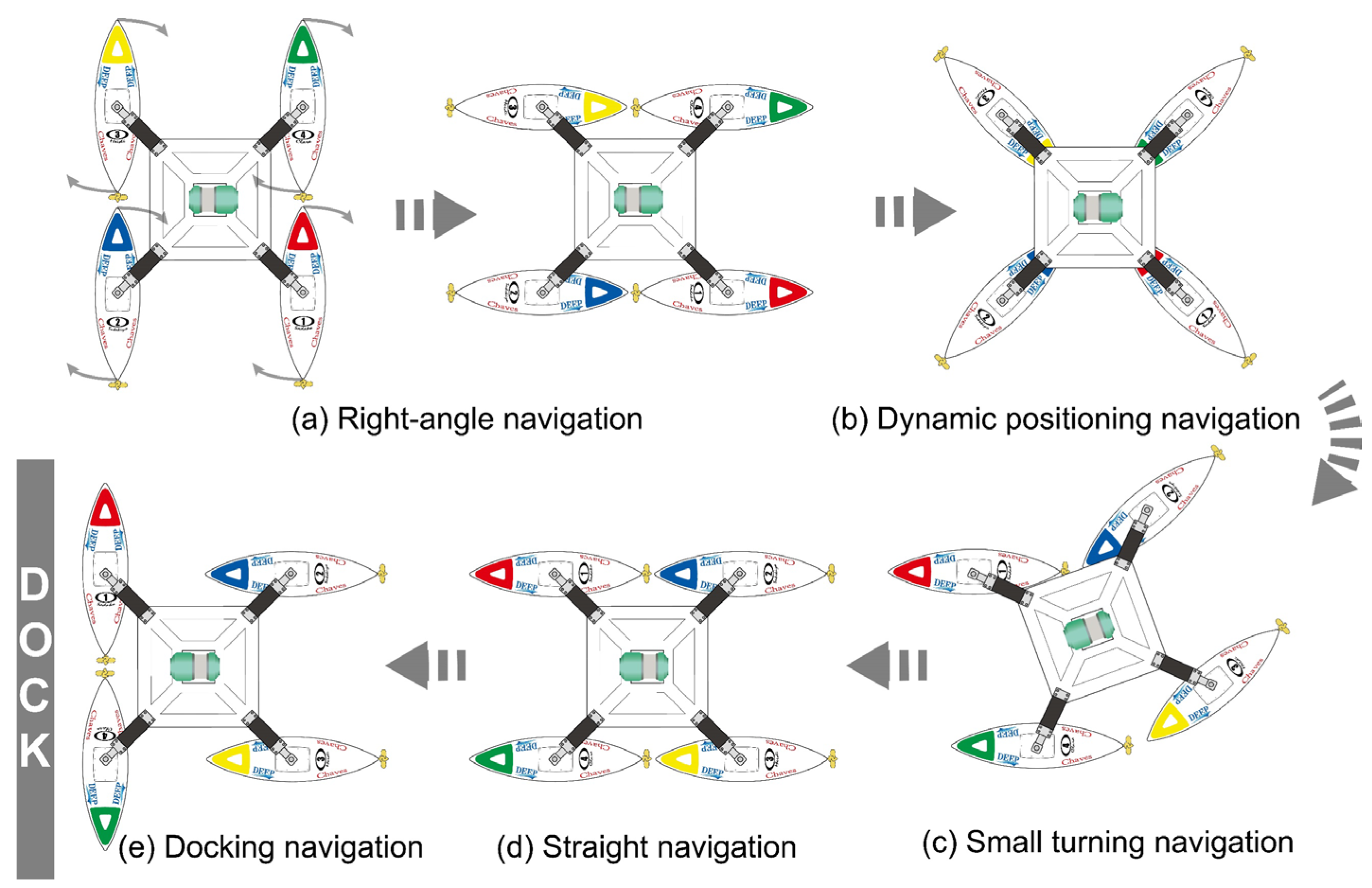
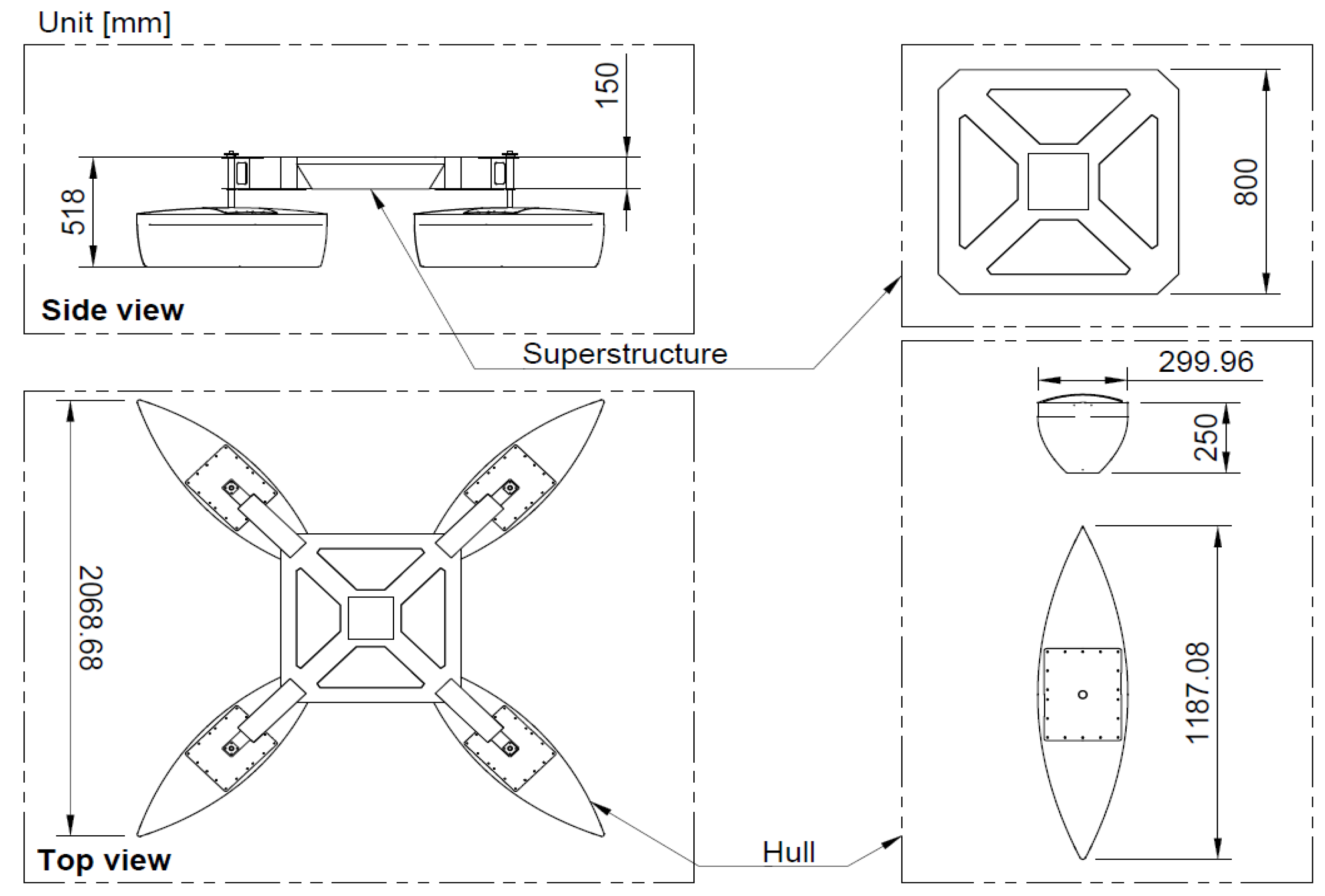
2.1. Quadmaran Vessel
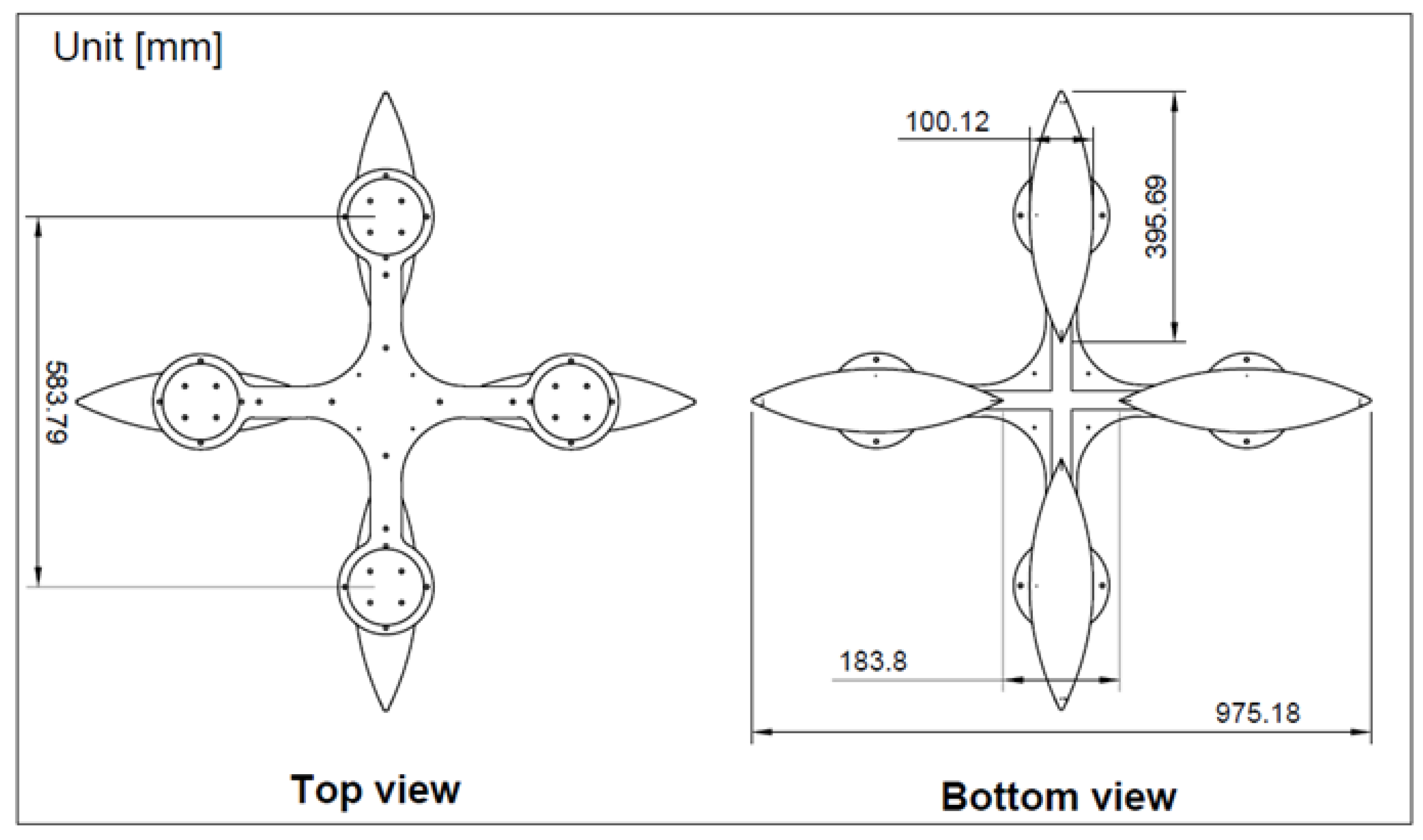
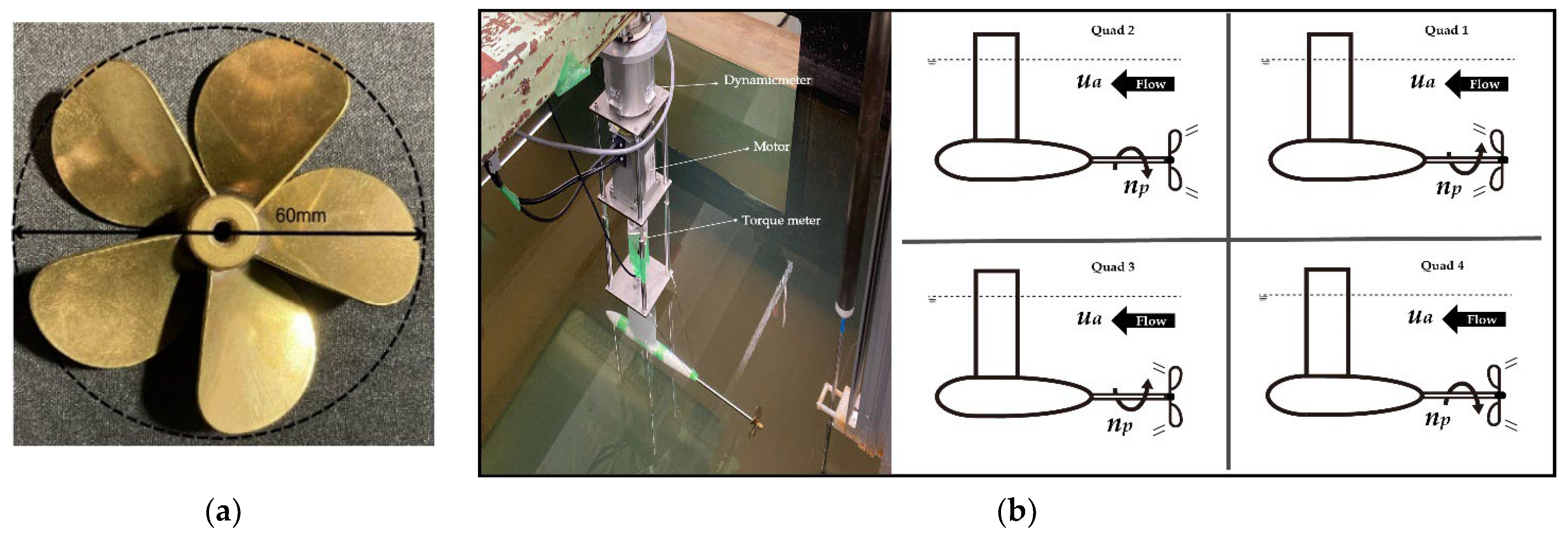
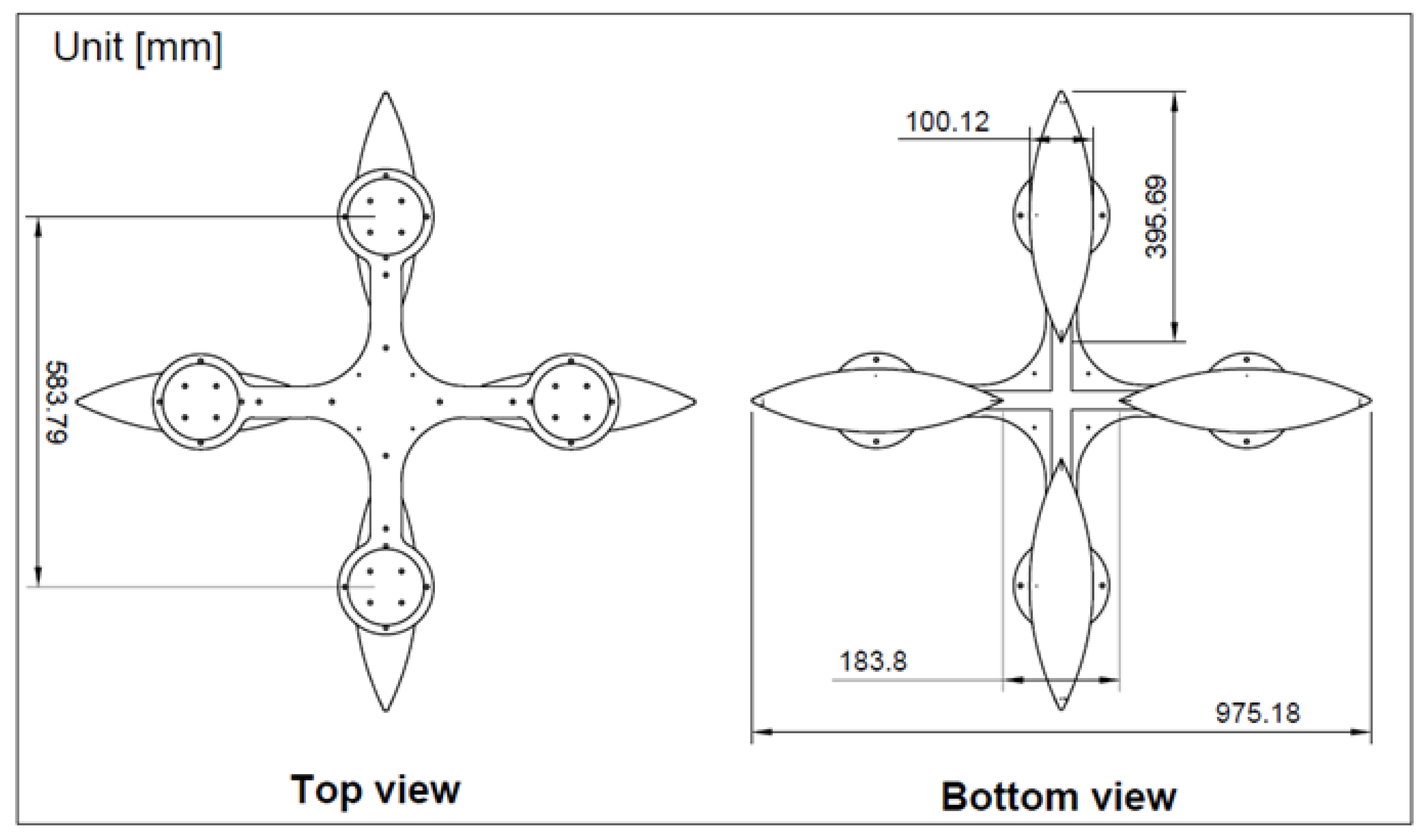
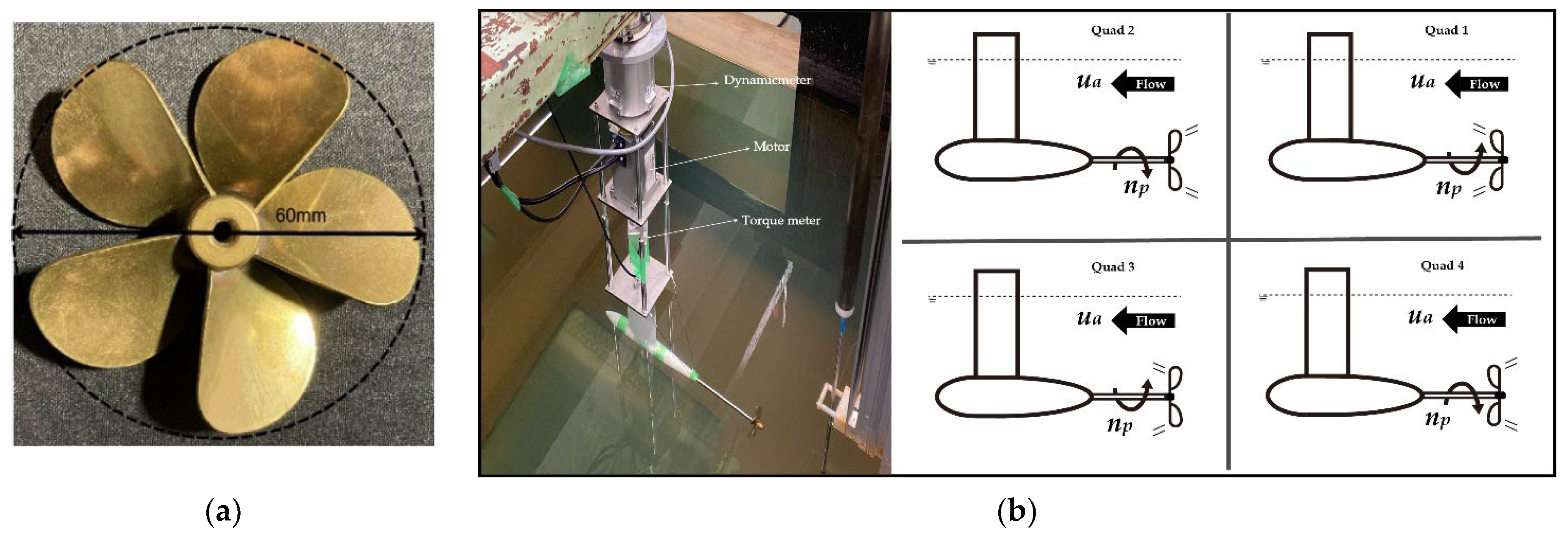
2.2. 1/3 Scale Experiment Model
3. Mathematical Model
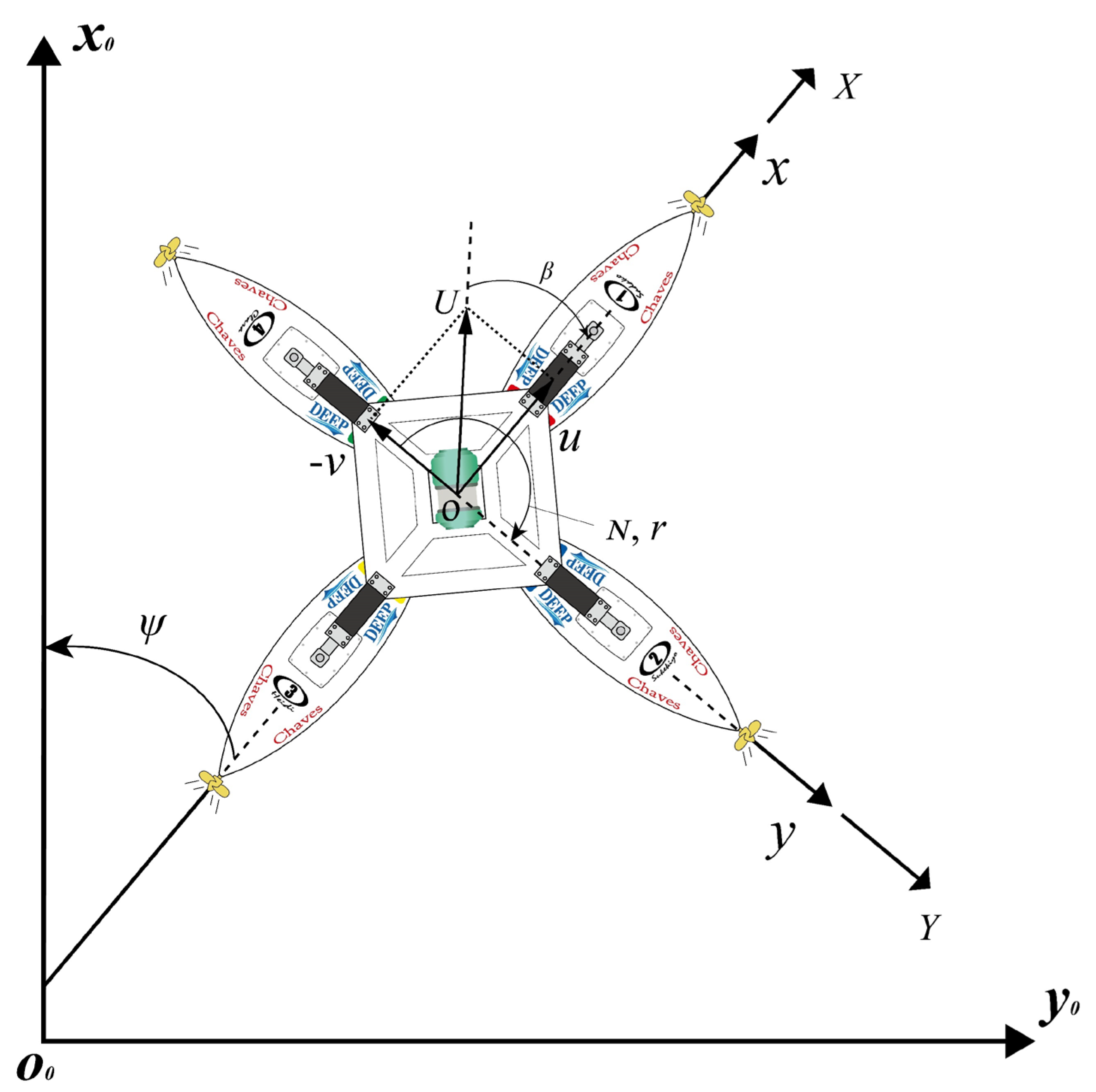
3.1. Motion Equations
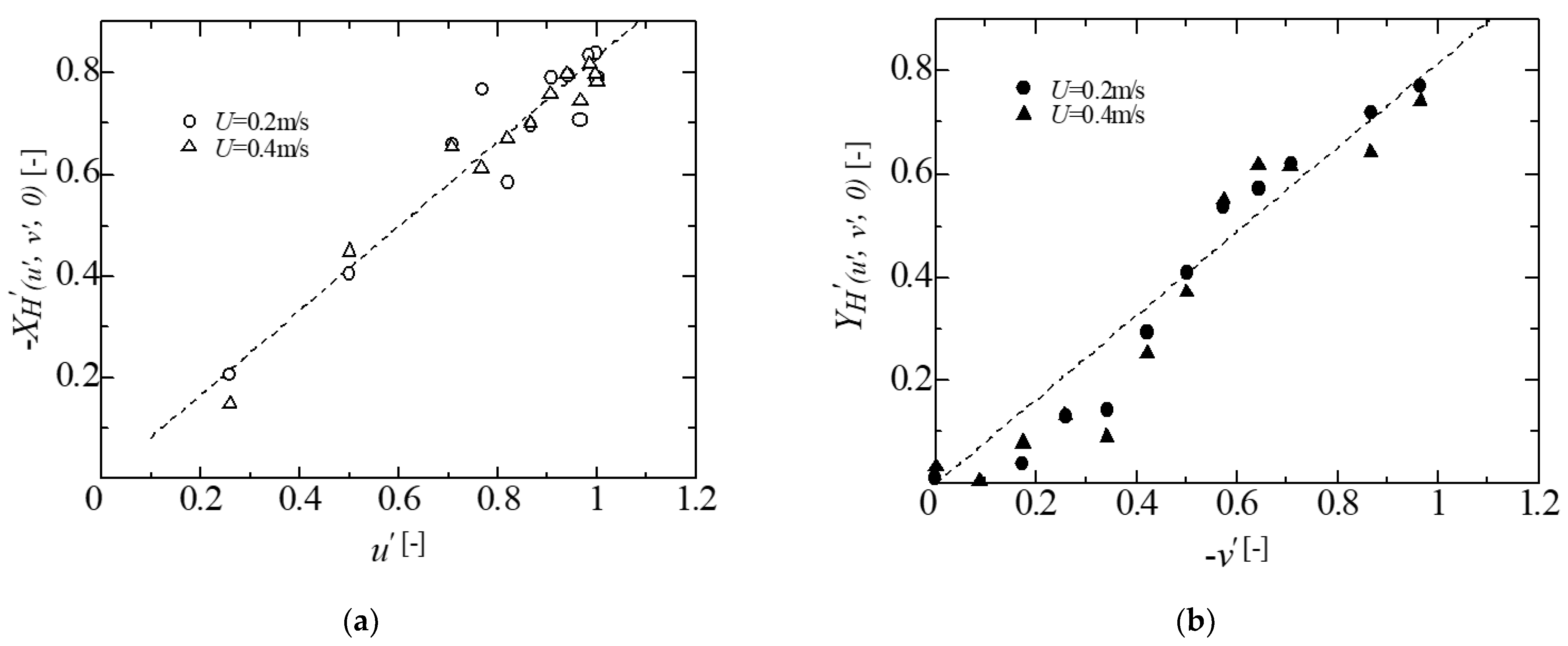
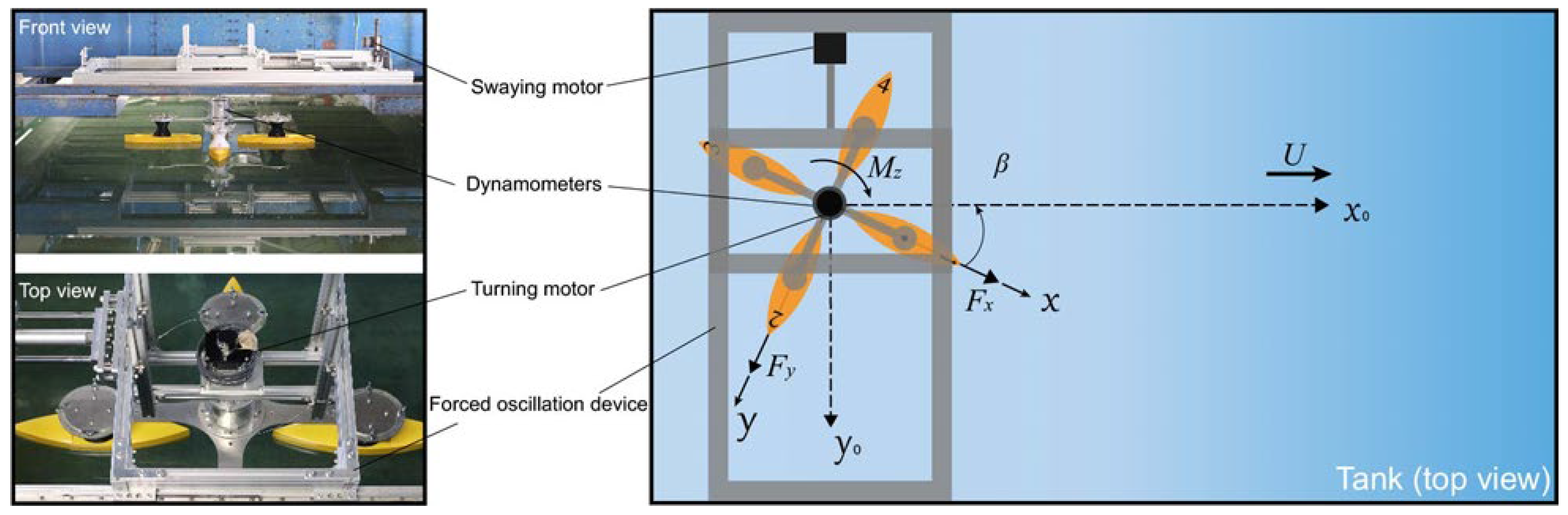
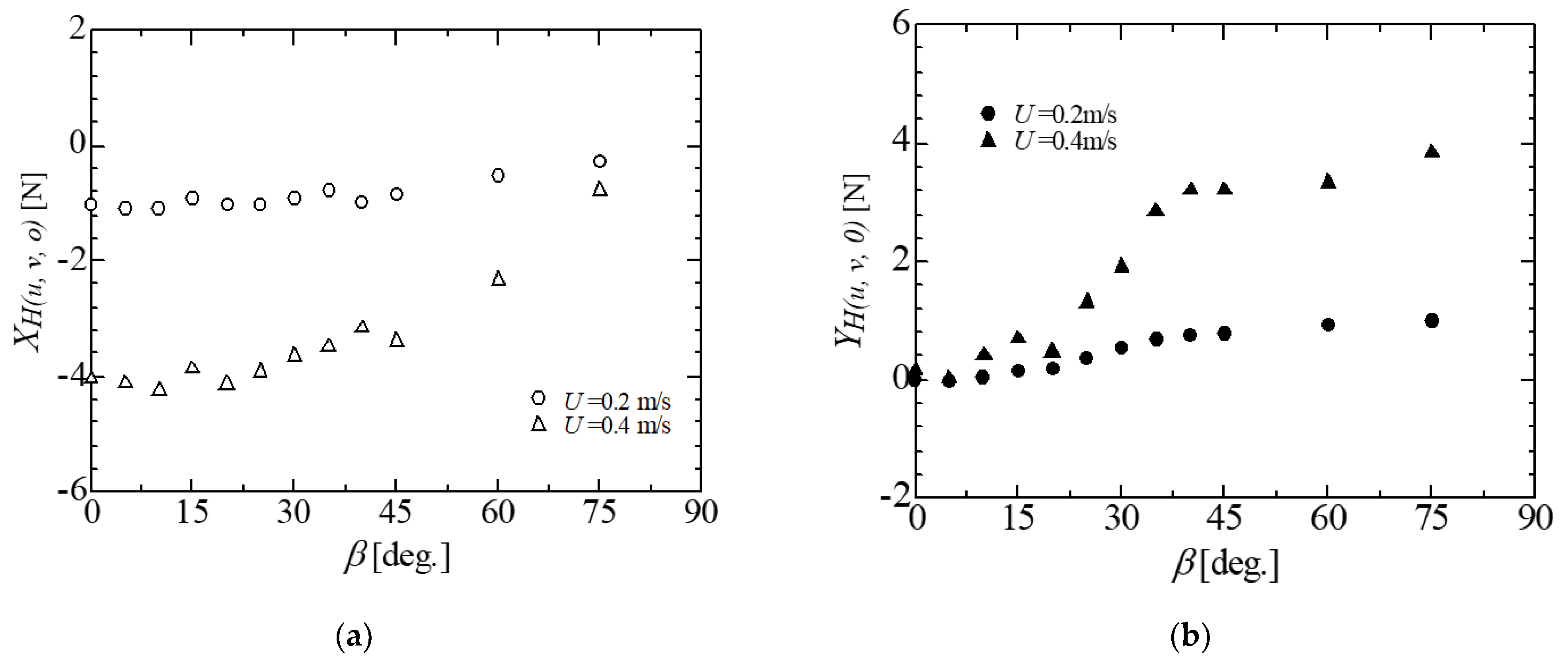
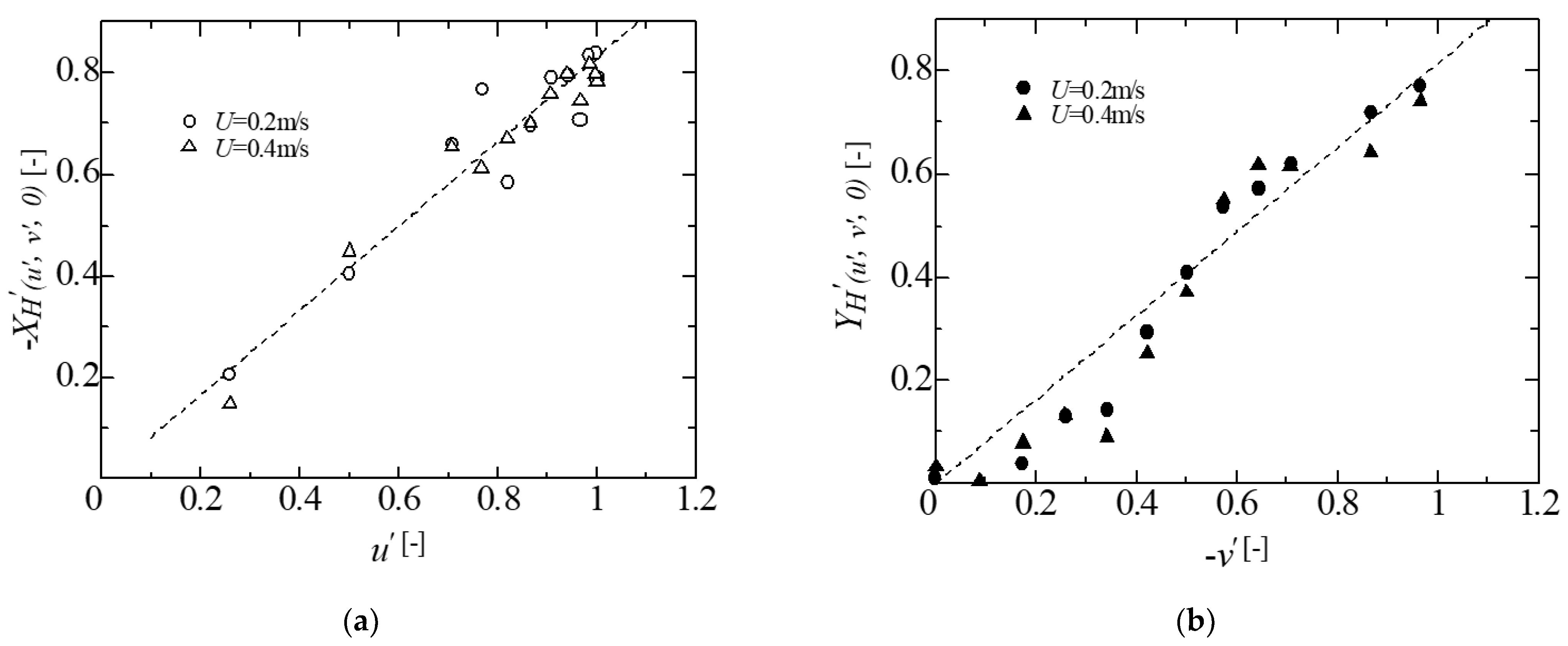
3.2. Water Loads Generated from Parallel Motion
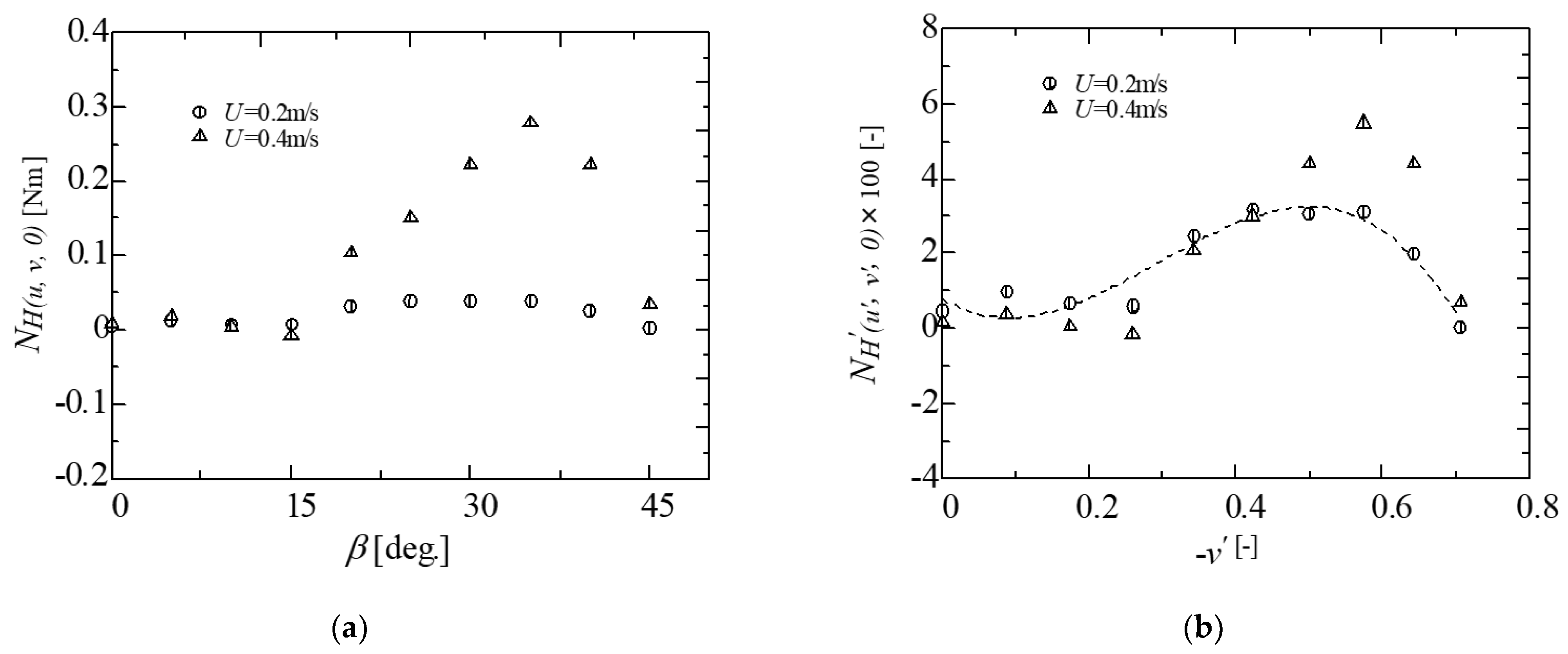
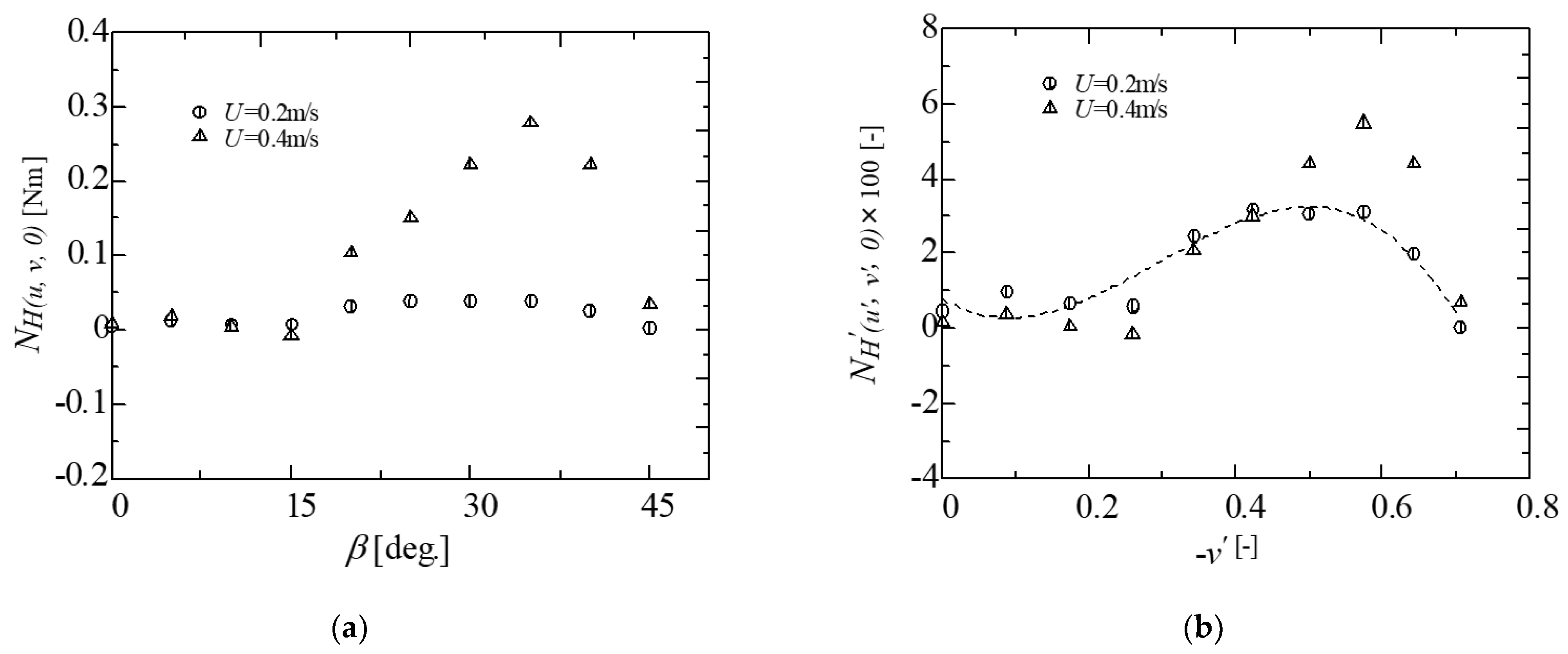
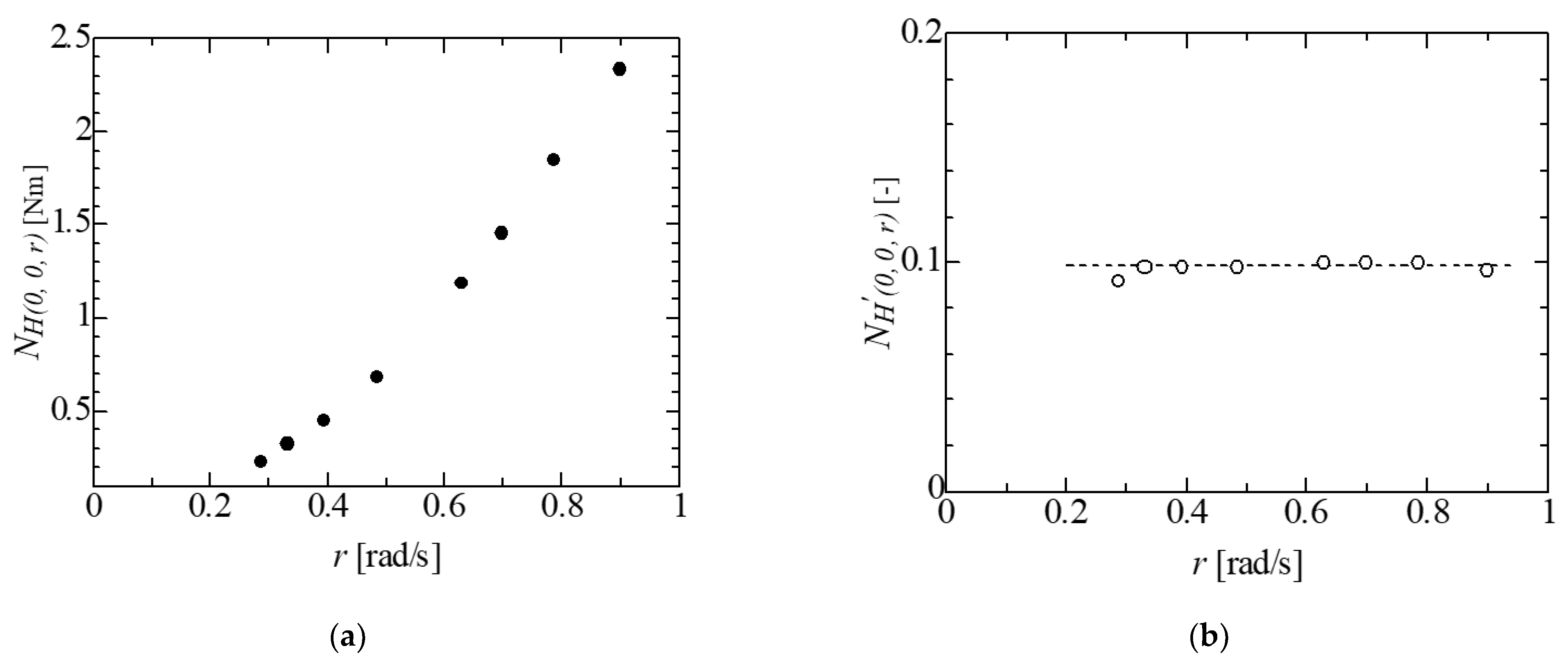
3.3. Moment Generated from Static Yawing Motion
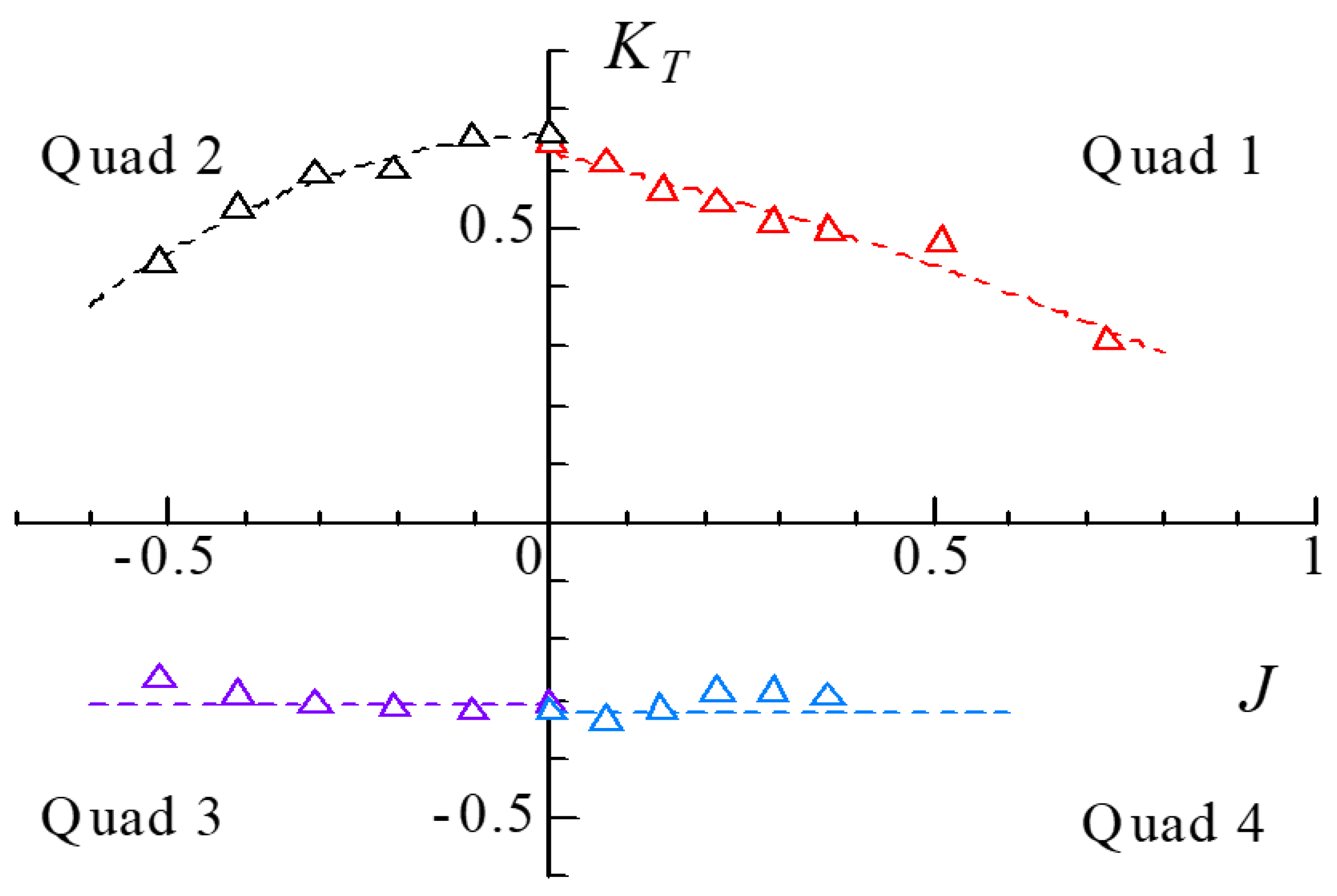
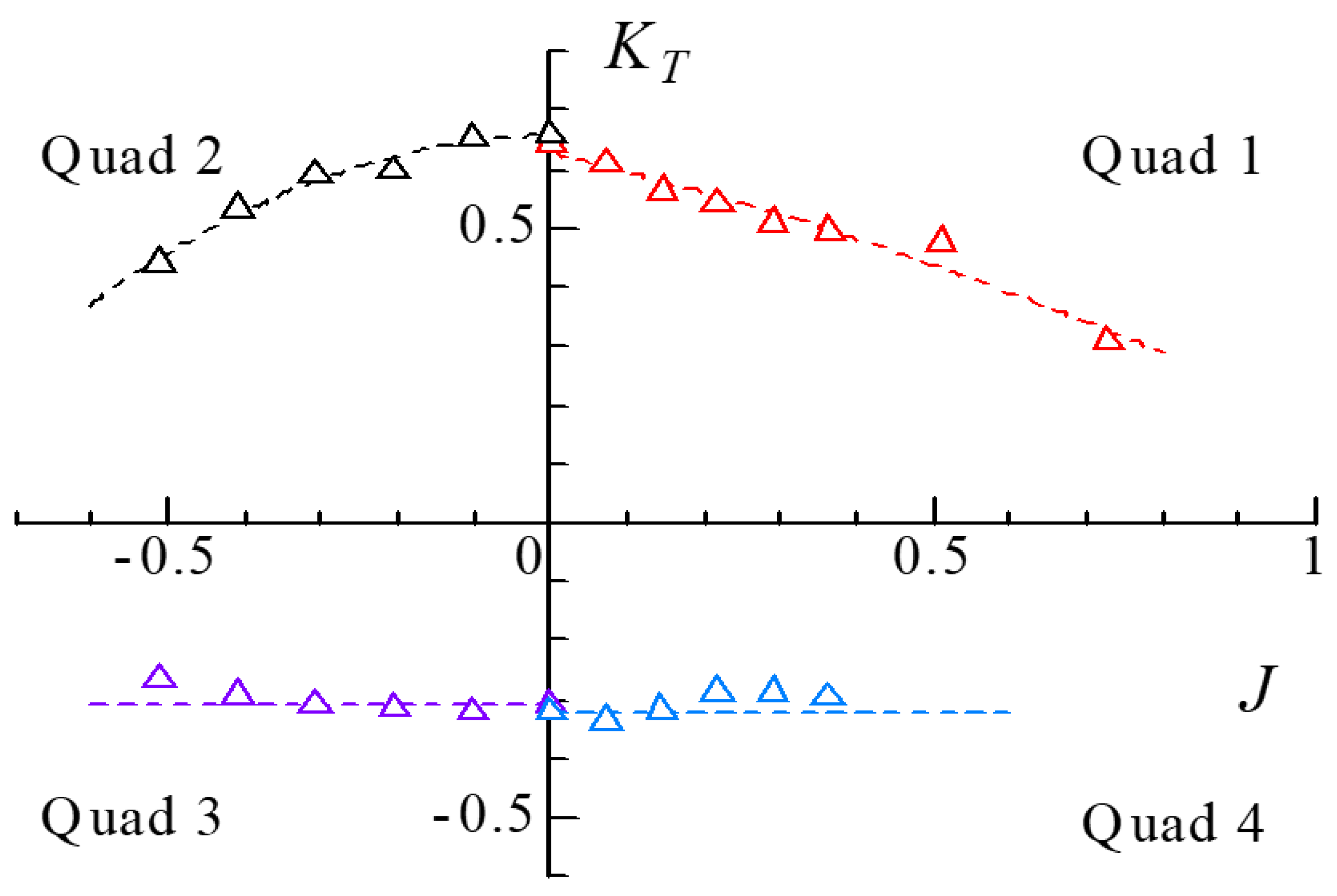
3.4. Propeller Thrust
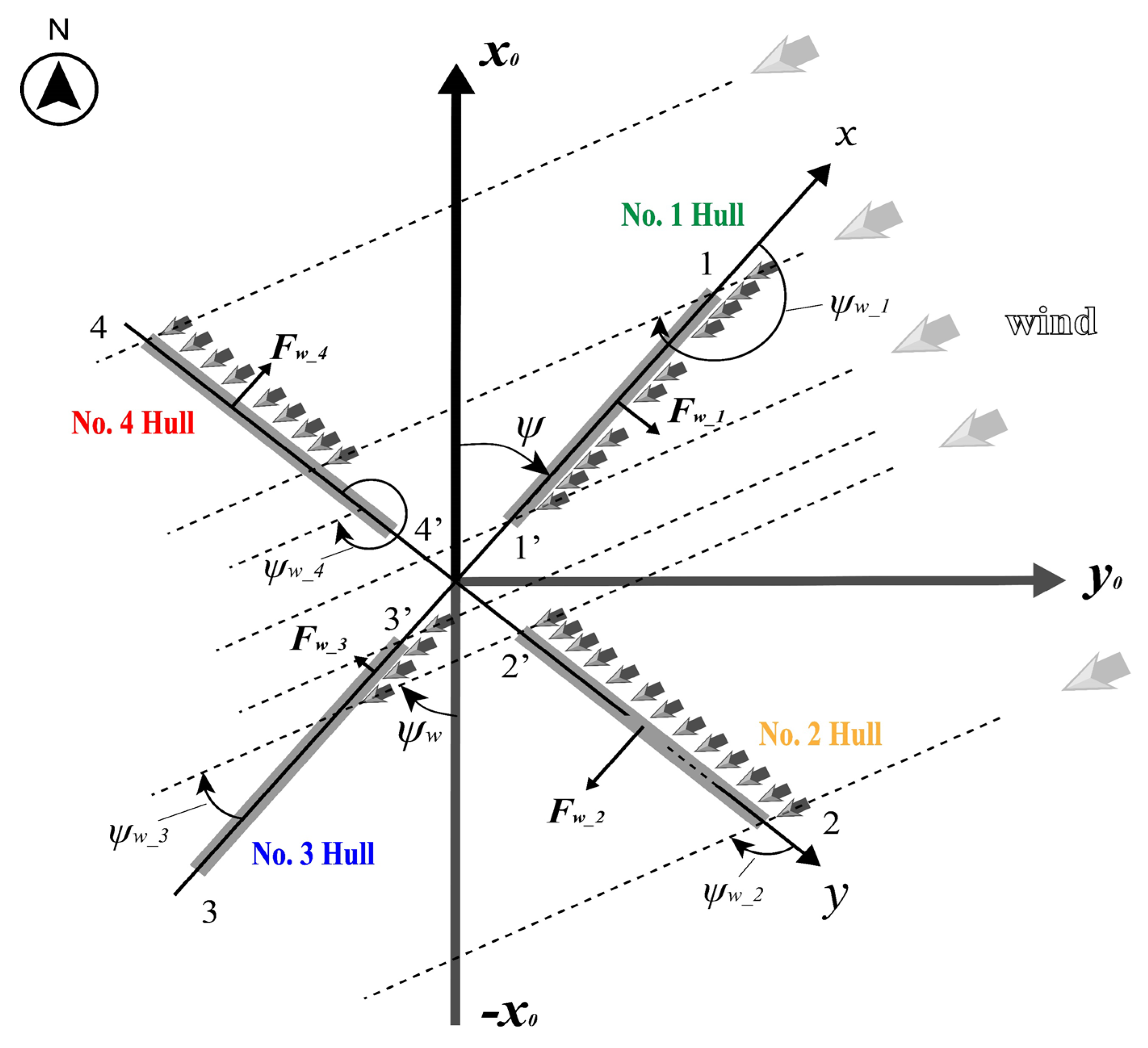
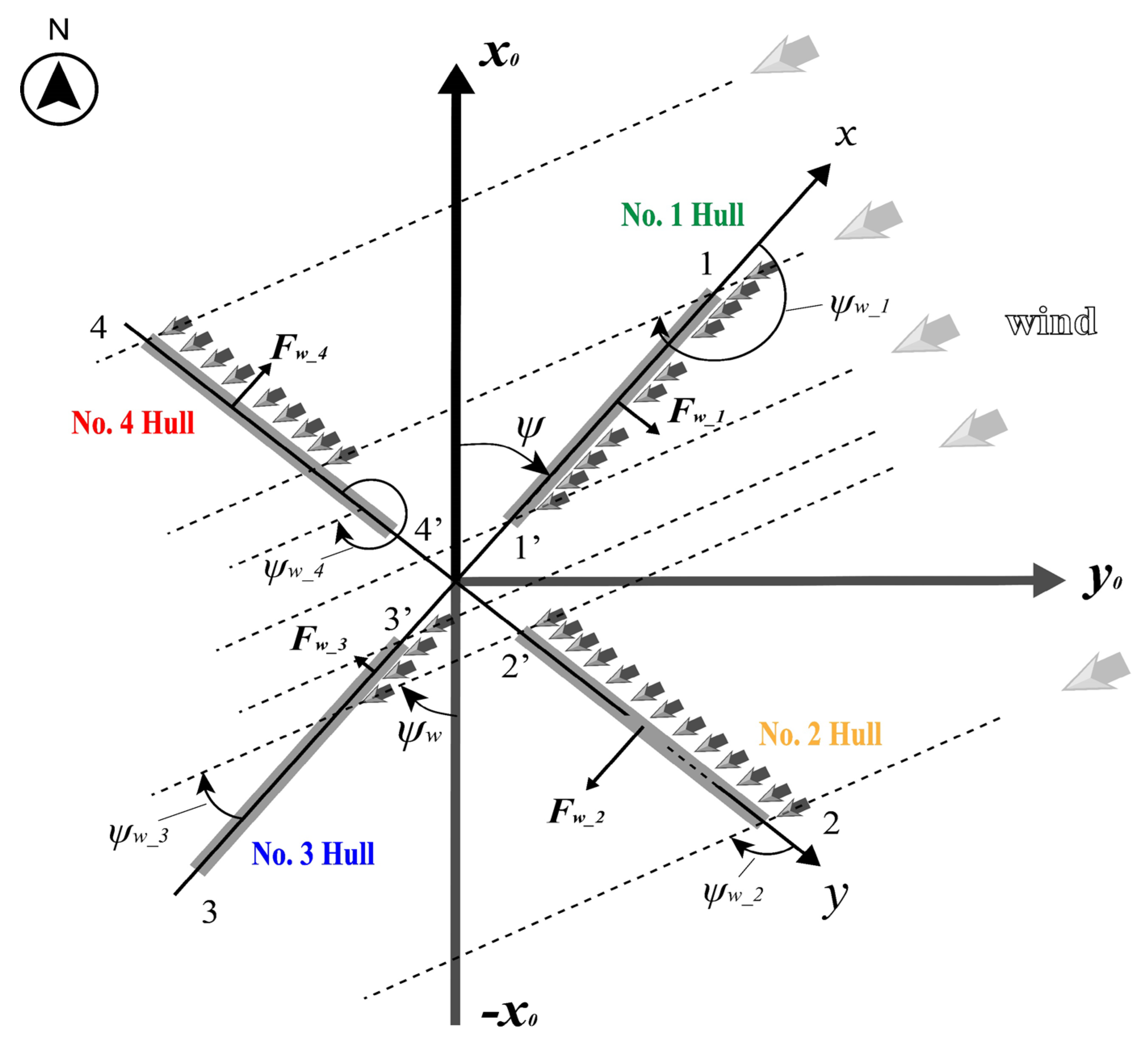
3.5. Wind Loads
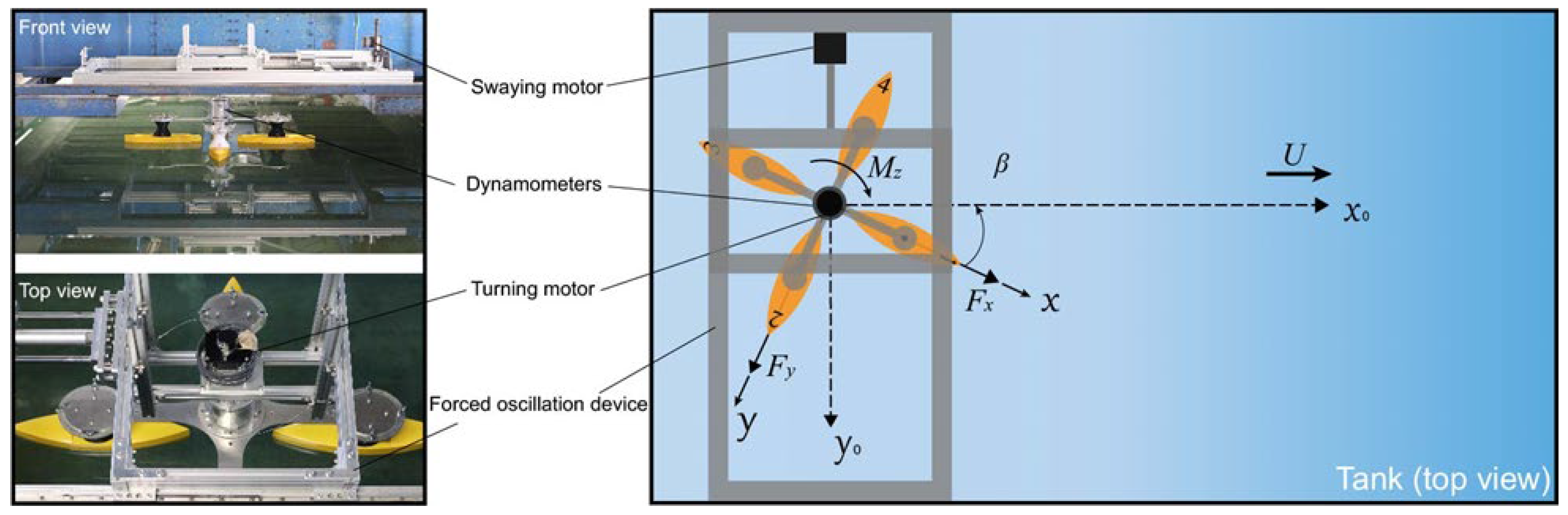
4. Experimental Validation
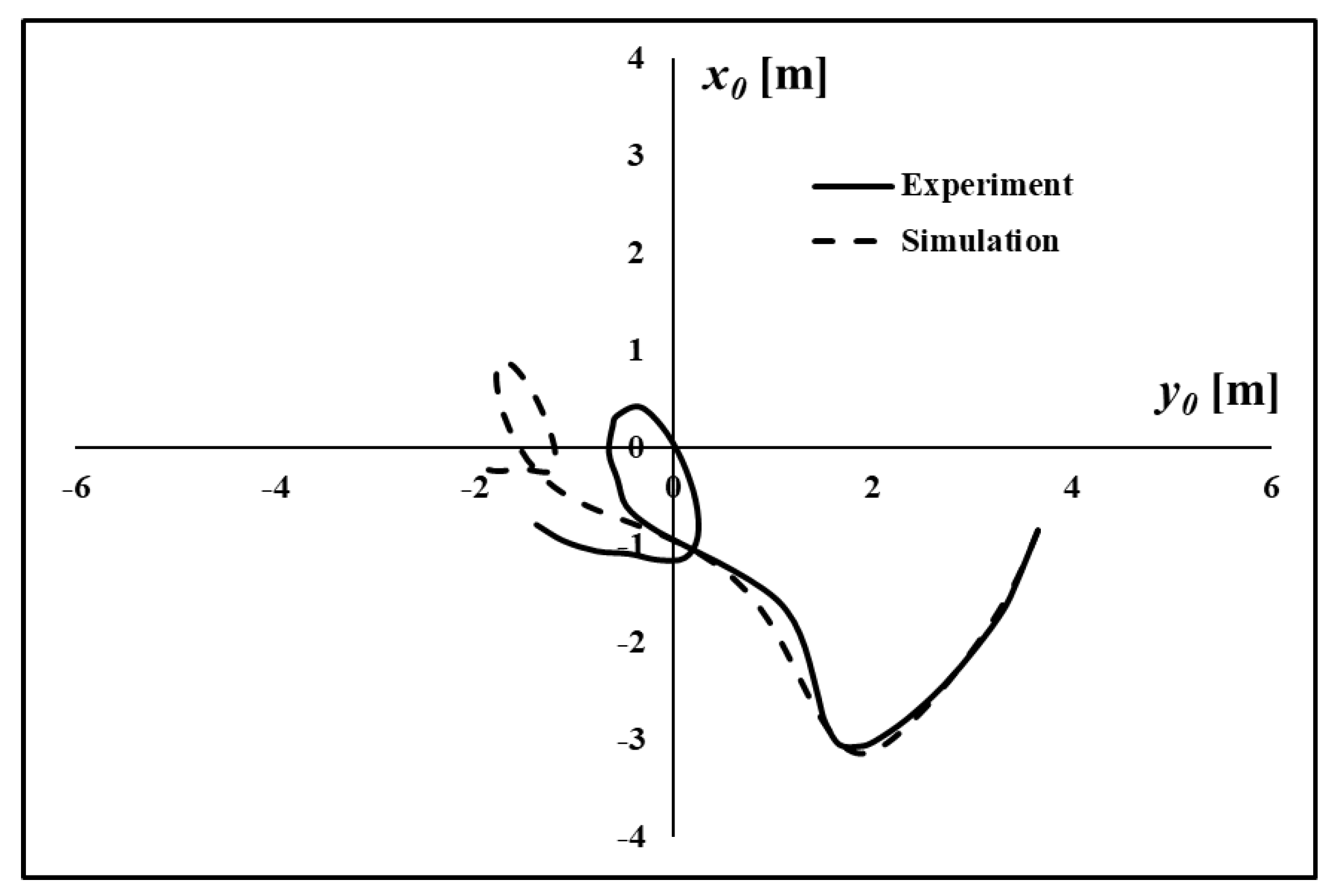
4.1. Calm Water Area
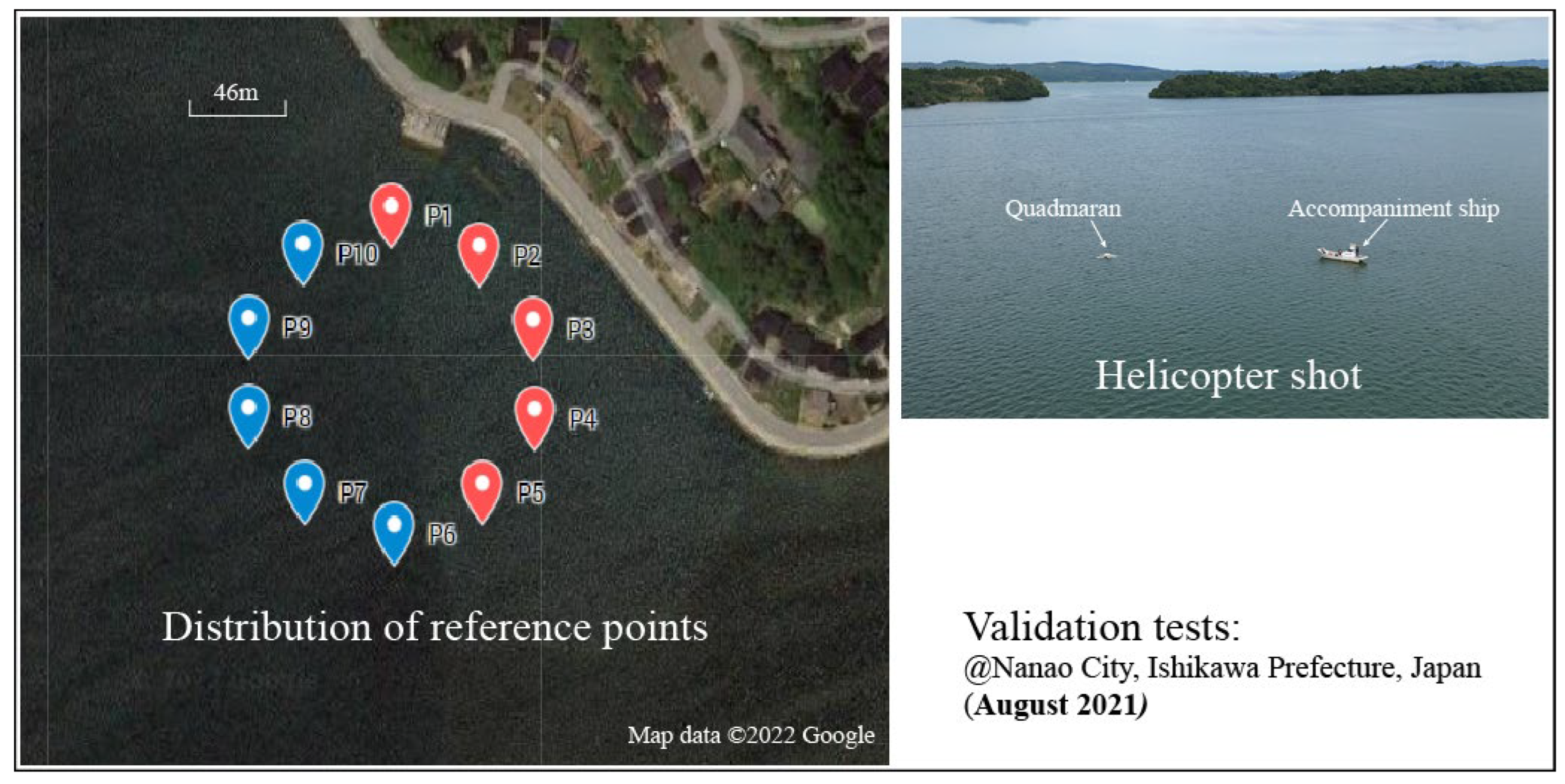
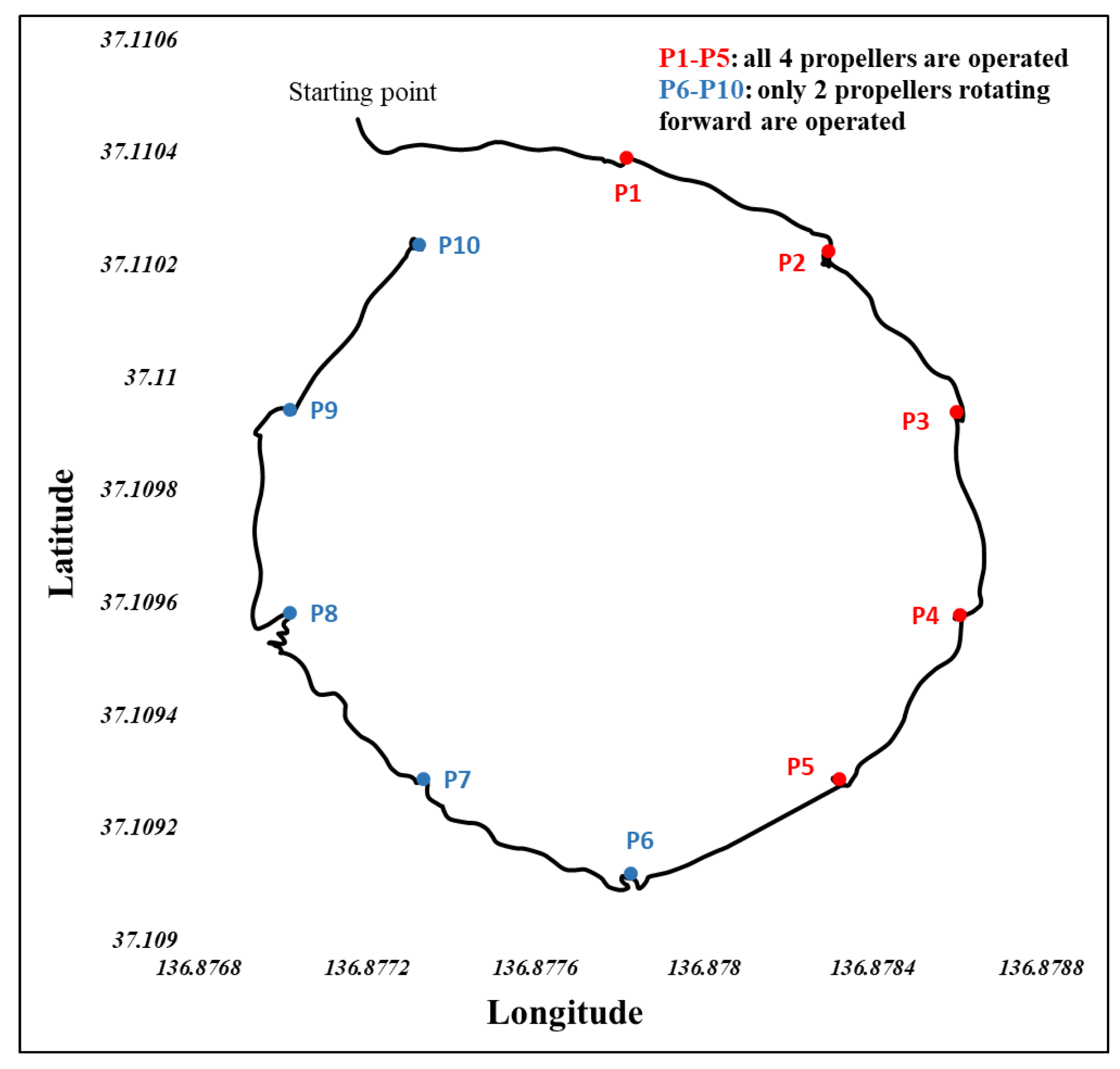
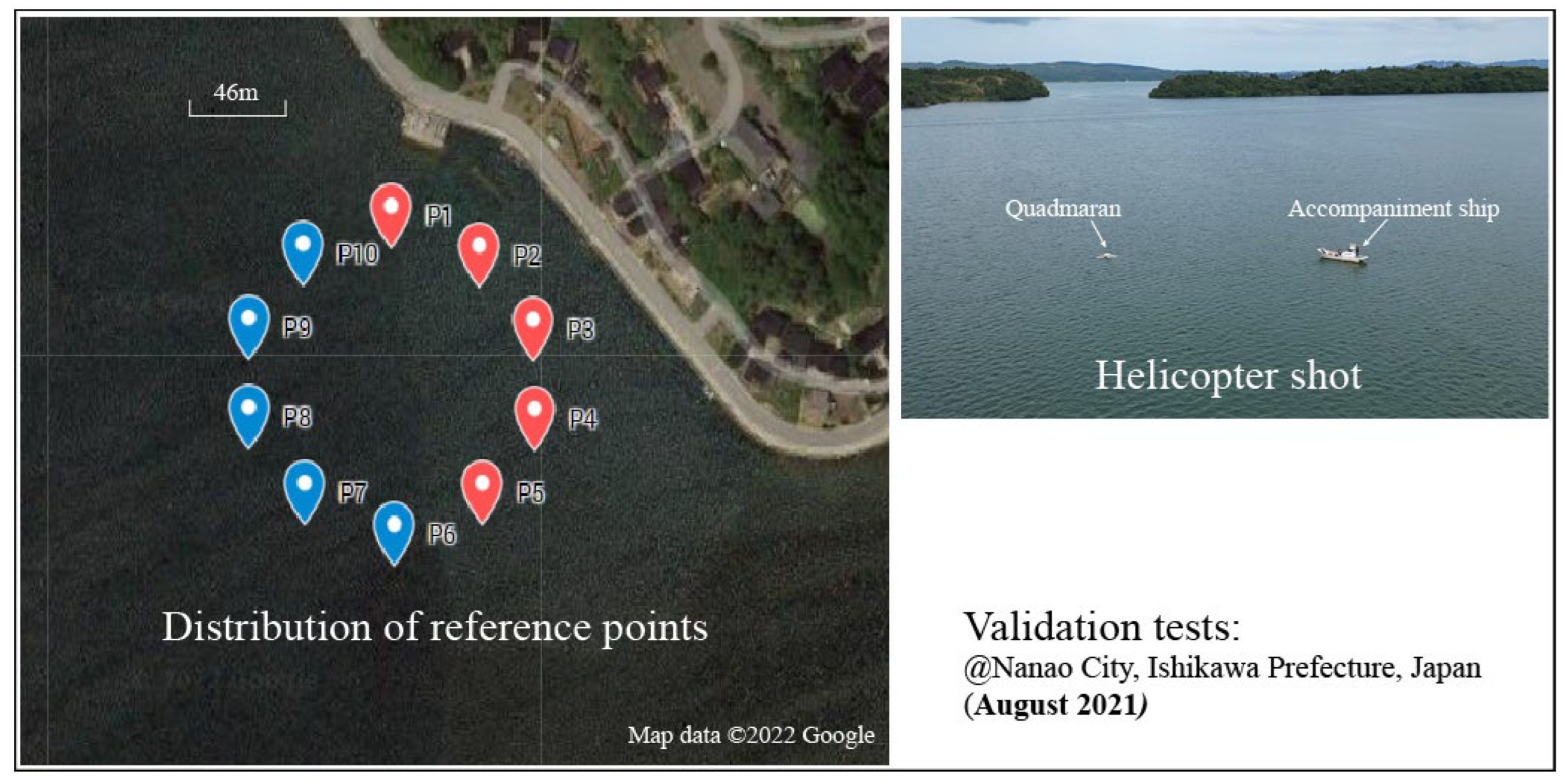
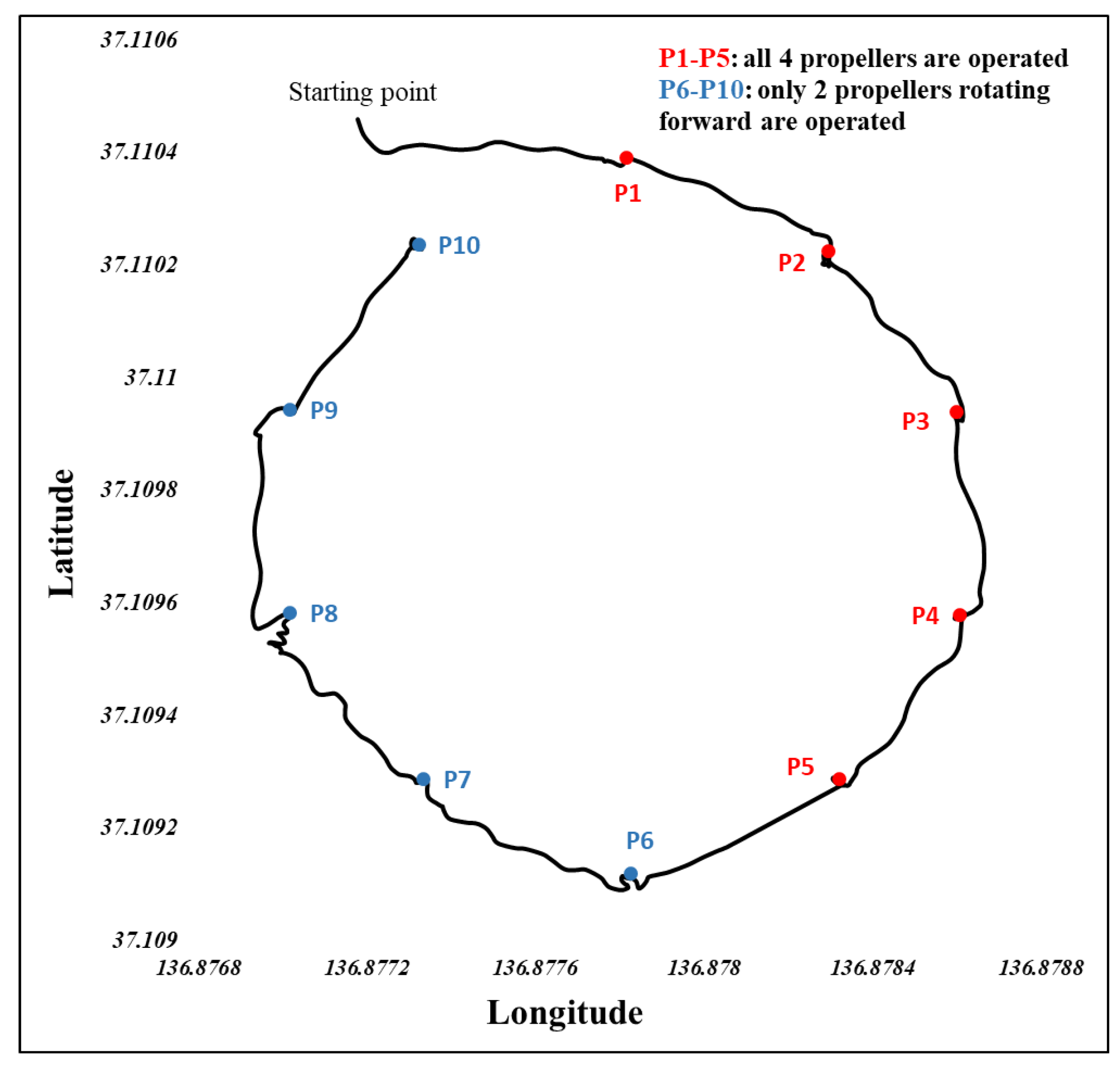
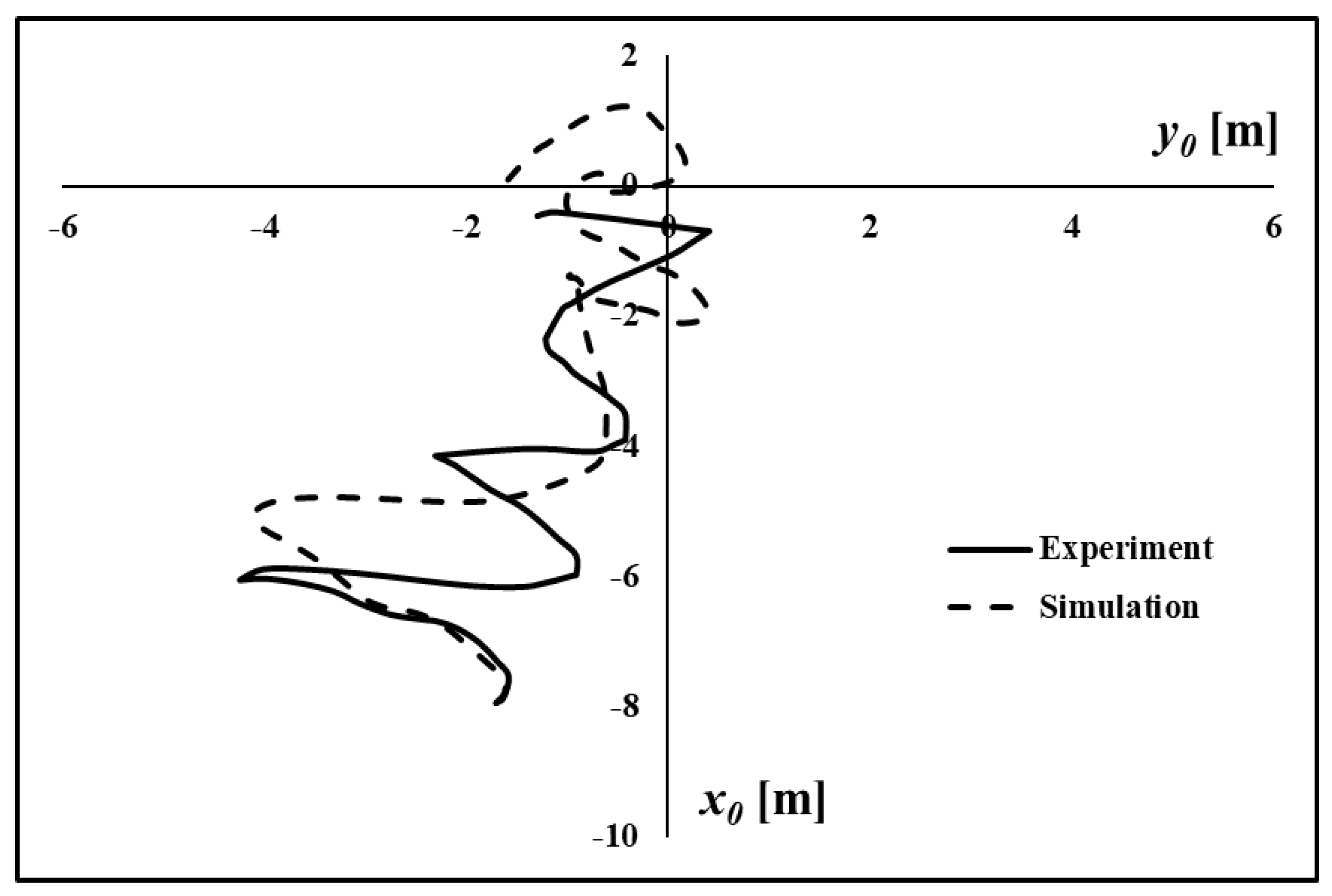
4.2. Actual Sea Area
5. Conclusions
- The Quadmaran vessel can be dynamically positioned and kept within 2 m of the target point, under wind speeds not exceeding 5 m/s, as observed in actual sea tests.
- The drift angle of the vessel had a significant effect on the water loads generated from the parallel motion. The parallel motion with a drift angle in the range of 20–45 degrees was likely to rapidly fluctuate the fluid force due to the unique hull shape. The moment generated from the static yawing motion was almost proportional to the square of the yaw rate. The thrust coefficient (KT) decreased as the advance ratio (J) increased when rotating forward, and was almost constant when reversing.
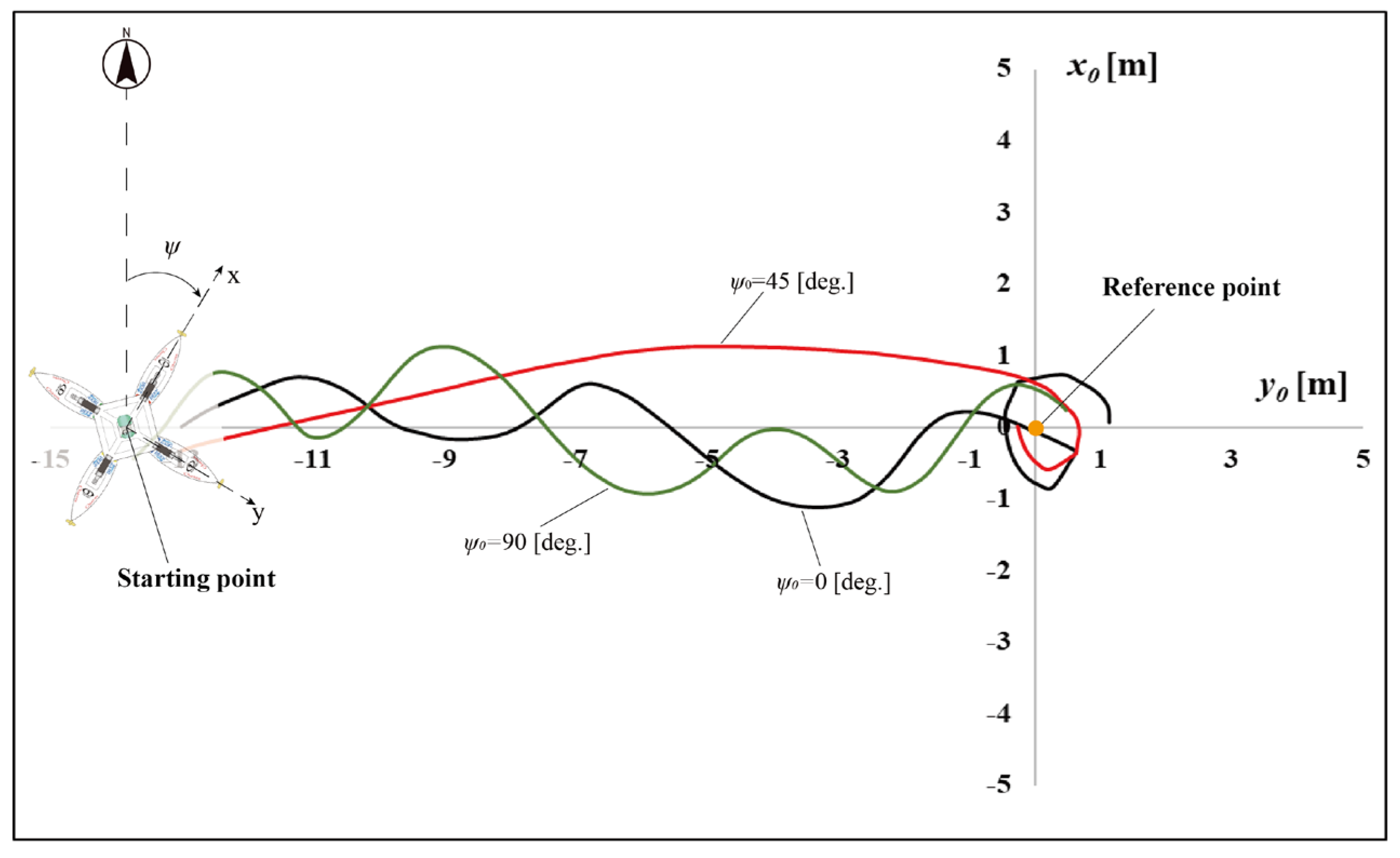
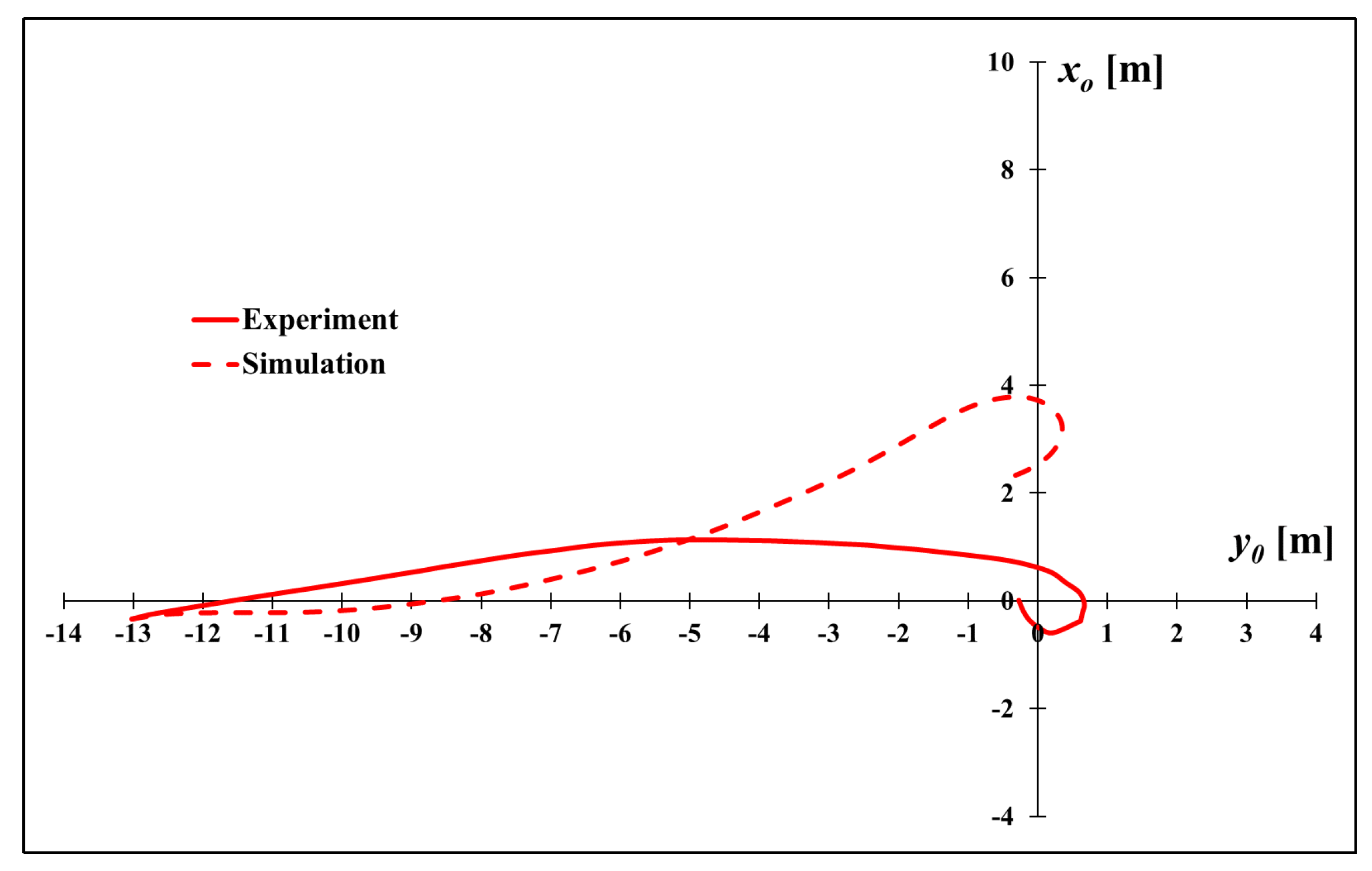
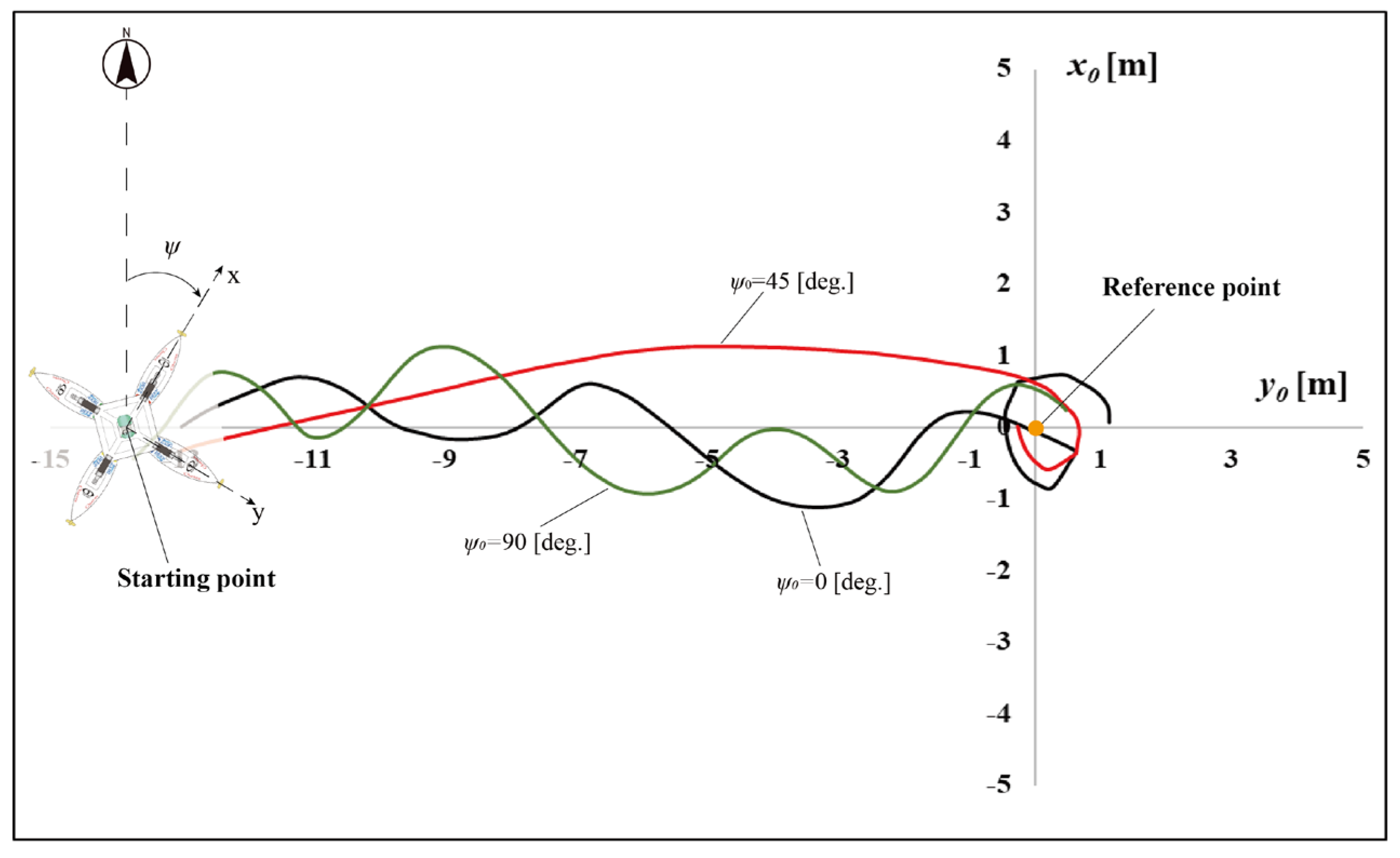
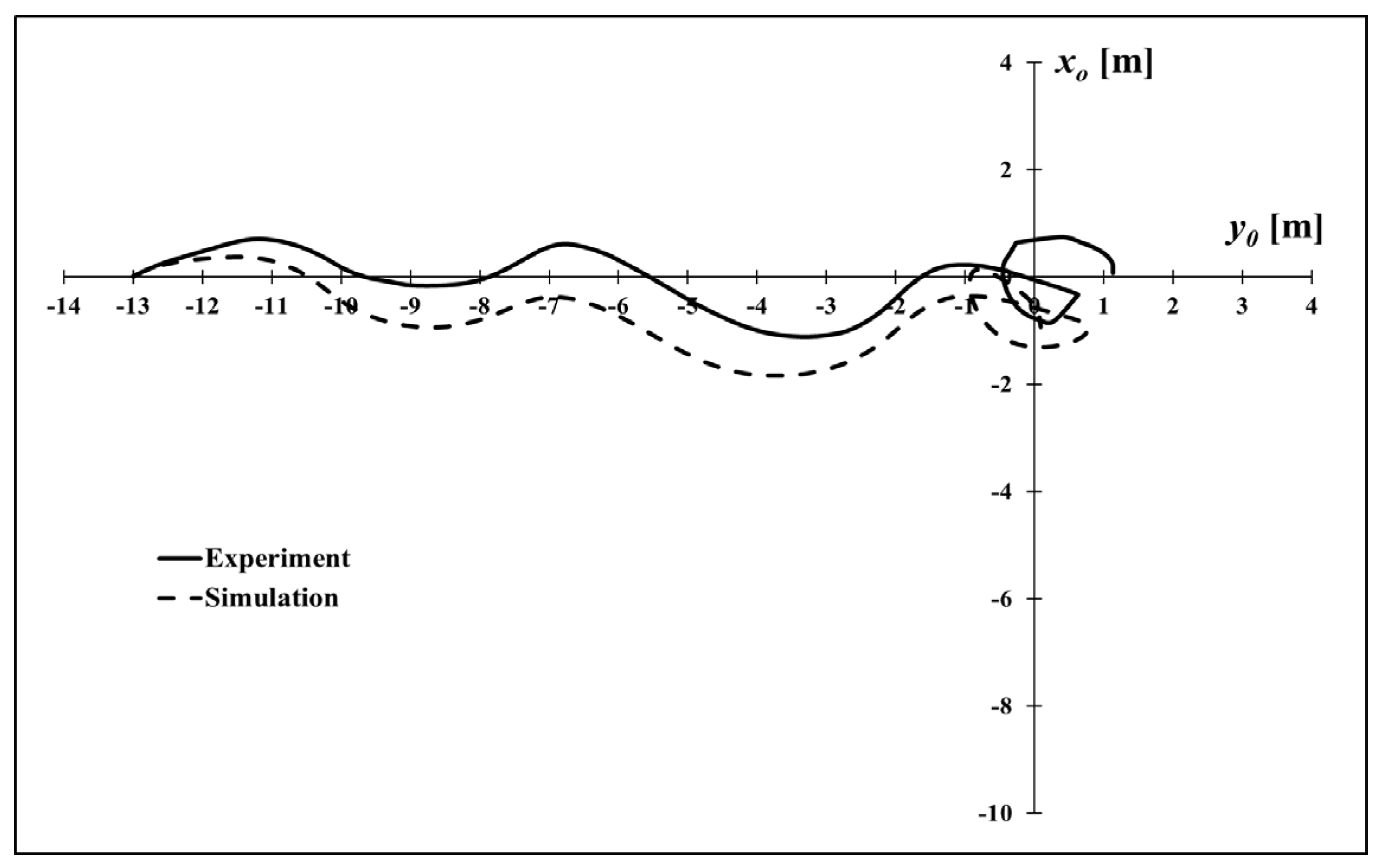
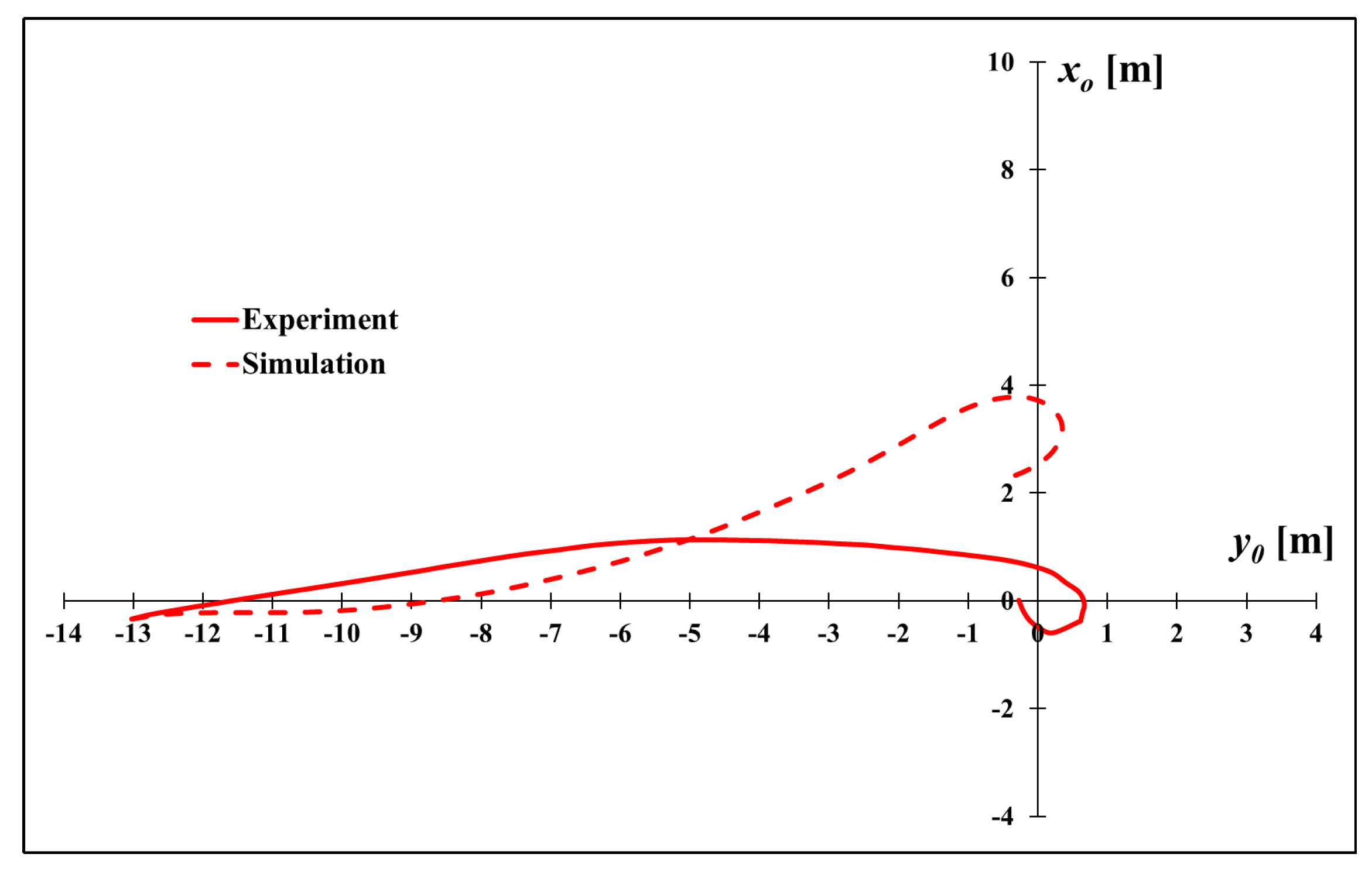
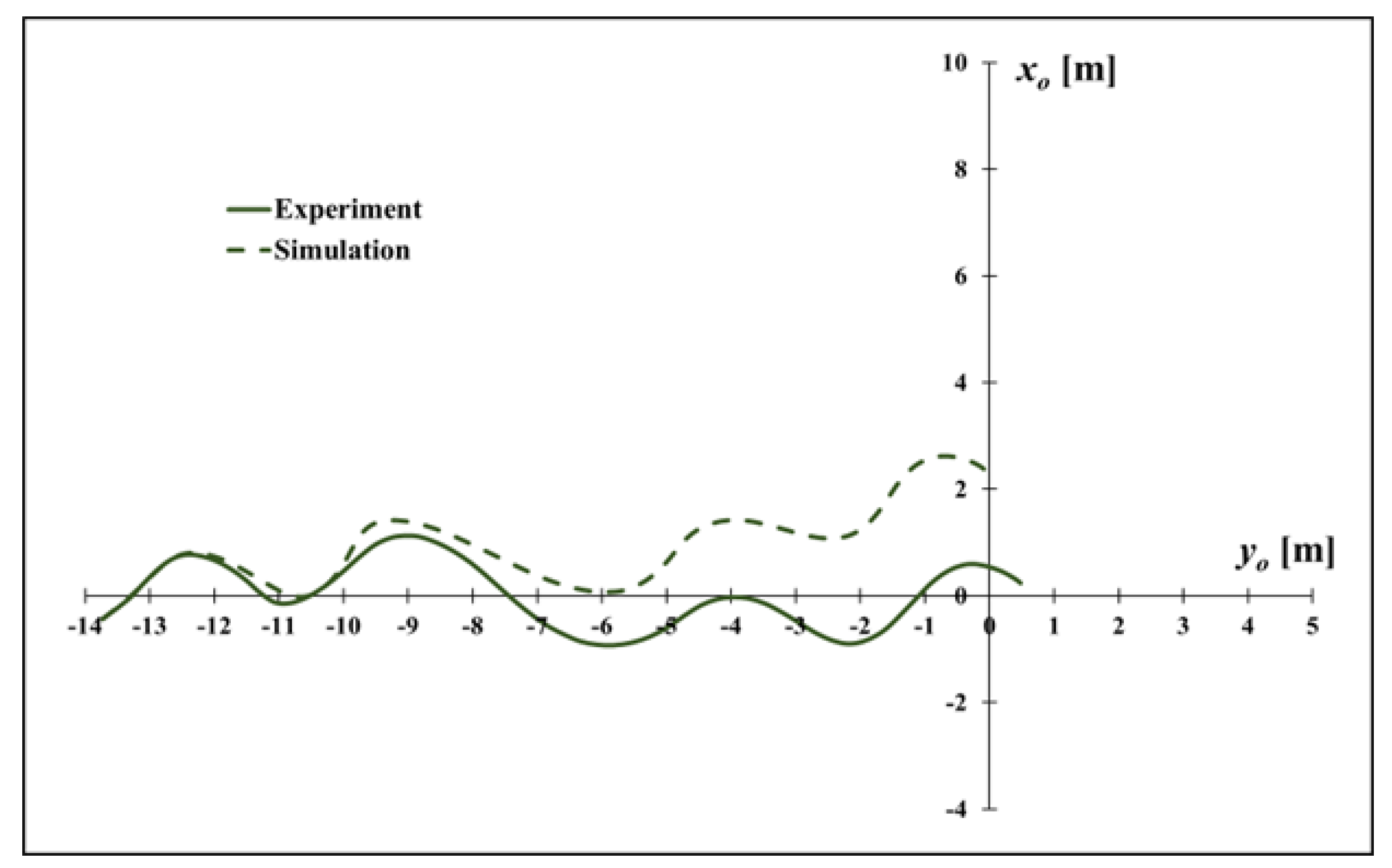
- The wind loads calculation model, which was established based on the database of wind load tests on a single hull and the superstructure, was found to be reliable in predicting the motion during DP of the vessel. The initial heading angle had some significance to the path of trajectory of the Quadmaran vessel in DP mode, but did not affect the prediction model if the loads were accurately assessed.
- The fluid force coefficient, assuming a quasi-static hull motion, was sufficiently accurate to predict the motion in DP mode. Therefore, the developed computational model can be useful to understand the motion characteristics of similar multi-hull vessels.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Japan Fisheries Agency: White Paper on Fisheries. Available online: https://www.jfa.maff.go.jp/j/kikaku/wpaper/h30_h/trend/1/t1_3_2_1.html (accessed on 29 June 2022).
- Fauzi, R.; Jaya, I.; Iqbal, M. Unmanned Surface Vehicle (USV) Performance Test in Bintan Island Waters. IOP Conf. Ser. Earth Environ. Sci. 2021, 944, 012013. [Google Scholar] [CrossRef]
- Lubczonek, J.; Kazimierski, W.; Zaniewicz, G.; Lacka, M. Methodology for Combining Data Acquired by Unmanned Surface and Aerial Vehicles to Create Digital Bathymetric Models in Shallow and Ultra-Shallow Waters. Remote Sens. 2021, 14, 105. [Google Scholar] [CrossRef]
- Liang, J.; Zhang, J.; Ma, Y.; Zhang, C.-Y. Derivation of Bathymetry from High-Resolution Optical Satellite Imagery and USV Sounding Data. Mar. Geod. 2017, 40, 466–479. [Google Scholar] [CrossRef]
- Stateczny, A.; Specht, C.; Specht, M.; Brčić, D.; Jugović, A.; Widźgowski, S.; Wiśniewska, M.; Lewicka, O. Study on the Positioning Accuracy of GNSS/INS Systems Supported by DGPS and RTK Receivers for Hydrographic Surveys. Energies 2021, 14, 7413. [Google Scholar] [CrossRef]
- Komizo, M.; Mukai, K.; Hara, N.; Nihei, Y.; Konishi, K. Sea Testing of Automatic Motion Control System for a Quad-Maran Unmanned Vessel. In Proceedings of the 2019 International Automatic Control Conference (CACS), Keelung, Taiwan, 13–16 November 2019; pp. 1–6. [Google Scholar]
- Kamio, K.; Tsurumi, Y.; Sakamoto, H.; Mishina, H.; Masuda, N.; Nakada, S.; Nihei, Y. Development of Water Quality Observation System in Shallow Water Using a Quadmaran Automated Vessel. J. Jpn. Soc. Civ. Eng. Ser. B1 Hydraul. Eng. 2021, 77, I_883–I_888. [Google Scholar] [CrossRef]
- Nakada, S.; Mishina, H.; Kamio, K.; Masuda, N.; Nihei, Y. Monitoring for low-salinity water for aquafarm in hichirippu lagoon using quadmaran automated vessel. J. Jpn. Soc. Civ. Eng. Ser. B2 Coast. Eng. 2021, 77, I_871–I_876. [Google Scholar] [CrossRef]
- Nihei, Y.; Kitamura, S.; Miyamoto, K.; Sotojo, M.; Ishii, Y.; Chikamoto, M.; Shinoi, T.; Masuda, N. Ships. 2017. Available online: https://patents.google.com/patent/JP6332824B1/en?oq=Patent+No.+6332824 (accessed on 30 June 2022).
- Komizo, M.; Zhang, C.; Hara, N.; Nihei, Y.; Konishi, K. At-Sea Test of Dynamic Positioning System for a Quad-Maran Unmanned Vessel. In Proceedings of the 18th International Conference on Control, Automation and Systems, PyeongChang, Korea, 17–20 October 2018; pp. 682–684. [Google Scholar]
- Sørensen, A.J. A Survey of Dynamic Positioning Control Systems. Annu. Rev. Control 2011, 35, 123–136. [Google Scholar] [CrossRef]
- Sotnikova, M.V.; Veremey, E.I. Dynamic Positioning Based on Nonlinear MPC. IFAC Proc. Vol. 2013, 46, 37–42. [Google Scholar] [CrossRef]
- Wang, L.; Yang, J.; Xu, S. Dynamic Positioning Capability Analysis for Marine Vessels Based on A DPCap Polar Plot Program. China Ocean. Eng. 2018, 32, 90–98. [Google Scholar] [CrossRef]
- Arditti, F.; Cozijn, H.; Van Daalen, E.F.G.; Tannuri, E.A. Dynamic Positioning Simulations of a Thrust Allocation Algorithm Considering Hydrodynamic Interactions. IFAC PapersOnLine 2018, 51, 122–127. [Google Scholar] [CrossRef]
- Ikeda, Y.; Katayama, T.; Okumura, H. Characteristics of Hydrodynamic Derivatives In Maneuvering Equations For Super High-Speed Planing Hulls. In Proceedings of the Tenth International Offshore and Polar Engineering Conference, Seattle, WA, USA, 28 May–2 June 2000. [Google Scholar]
- Sunarsih, S.; Priyanto, A.; Zamani, M.; Izzuddin, N. A Chebyshev Polynomial on Torque and Thrust Coefficients of Mathematical Propeller Properties for a LNG Manoeuvring Simulation. J. Ocean. Mech. Aerosp. Sci. Eng. 2014, 11, 11–20. [Google Scholar]
- Ji, M.; Srinivasamurthy, S.; Nihei, Y. Basic Research on the Influence of Descent Flow From Small Unmanned Aerial Vehicle (Quadcopter) on a Small Floating Body. In Proceedings of the ASME 2020 39th International Conference on Ocean, Offshore and Arctic Engineering, Virtual, 3–7 August 2020; Volume 6A, p. V06AT06A034. [Google Scholar]
- Ogawa, A.; Koyama, T.; Kijima, K. MMG report-I, on the mathematical model of ship manoeuvring. Bull. Soc. Nav. Arch. Jpn. 1977, 575, 192–198. [Google Scholar]
- Kazuo, S.; Noriyuki, S.; Takahumi, K. Hull Resistance and Propulsion; Marine Engineering; Seizando-Shoten Publishing Co., Ltd.: Shinjuku City, Japan, 2012. [Google Scholar]
- Hewins, E.F.; Chase, H.J.; Ruiz, A.L. The Backing Power of Geared Turbine Driven Vessels. Annu. Meet. Soc. Nav. Archit. Mar. Eng. 1950, 58, 276–283. [Google Scholar]
- Nihei, Y.; Tsurumi, Y.; Masuda, N.; Harada, K.; Okuno, J.; Hara, N.; Nakada, S. Automatic And Frequent Measurement Of Water Quality at Multi-Points Using Quadmaran. J. JSCE Ser. B1 2020, 76, I_1039–I_1044. [Google Scholar] [CrossRef]
- Tsurumi, Y. A Study on Speed Estimation of Quadmaran under Wind Pressure; Osaka Prefecture University: Osaka, Japan, 2019. [Google Scholar]
- High-Precision Positioning Service Ichimill. Available online: https://www.softbank.jp/biz/services/analytics/ichimill/ (accessed on 29 June 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value | Unit |
|---|---|---|
| Length | 1187 | mm |
| Breadth | 300 | mm |
| Height | 280 | mm |
| Mass | 136 | kg |
| Diameter of a propeller | 60 | mm |
| Number of blades of a propeller | 5 | - |
| X | Hydrodynamic force in the x-axis [N] |
| Y | Hydrodynamic force in the y-axis [N] |
| N | Hydrodynamic moment around the z-axis [Nm] |
| U | Forward movement speed [m/s] |
| u | Velocity in the x-axis [m/s] |
| v | Velocity in the y-axis [m/s] |
| r | Yaw rate [rad/s] |
| β | Drift angle [deg.] |
| ψ | Heading angle [deg.] |
| Item | Value | Unit |
|---|---|---|
| Towing speed (U) | 0.2, 0.4 | m/s |
| Drift angle (β) | 0, 5, 10, 15, 20, 25, 30, 35, 40, 45, 60, 75 | deg. |
| Item | Value | Unit |
|---|---|---|
| Flow velocity (ua) | 0.0, 0.1, 0.2, 0.4, 0.5, 0.7, 1.0 (0.7, 1.0 only for Quad 1) | m/s |
| Rotational speed (np) | 976 | rpm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, M.; Srinivasamurthy, S.; Nihei, Y. A Quasi-Static Motion Prediction Model of a Multi-Hull Navigation Vessel in Dynamic Positioning Mode. Appl. Sci. 2022, 12, 8759. https://doi.org/10.3390/app12178759
Ji M, Srinivasamurthy S, Nihei Y. A Quasi-Static Motion Prediction Model of a Multi-Hull Navigation Vessel in Dynamic Positioning Mode. Applied Sciences. 2022; 12(17):8759. https://doi.org/10.3390/app12178759
Chicago/Turabian StyleJi, Mingyao, Sharath Srinivasamurthy, and Yasunori Nihei. 2022. "A Quasi-Static Motion Prediction Model of a Multi-Hull Navigation Vessel in Dynamic Positioning Mode" Applied Sciences 12, no. 17: 8759. https://doi.org/10.3390/app12178759
APA StyleJi, M., Srinivasamurthy, S., & Nihei, Y. (2022). A Quasi-Static Motion Prediction Model of a Multi-Hull Navigation Vessel in Dynamic Positioning Mode. Applied Sciences, 12(17), 8759. https://doi.org/10.3390/app12178759