
Identification of Dynamic Parameters and Frequency Response Properties of Active Hydraulic Mount with Oscillating Coil Actuator: Theory and Experiment


Abstract
:1. Introduction
2. Model of an Active Hydraulic Mount and Frequency Band Definition
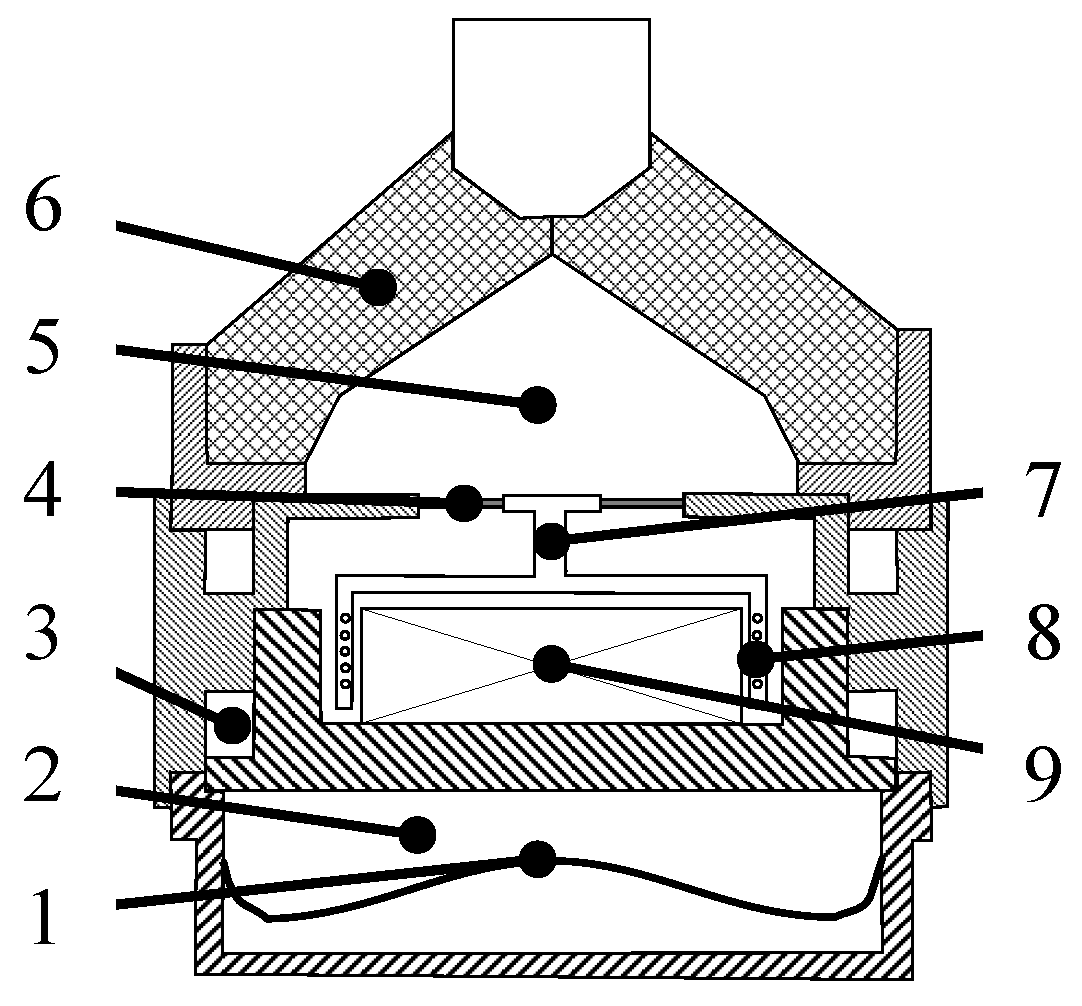
2.1. Model of the Active Hydraulic Mount with Oscillating Coil Actuator
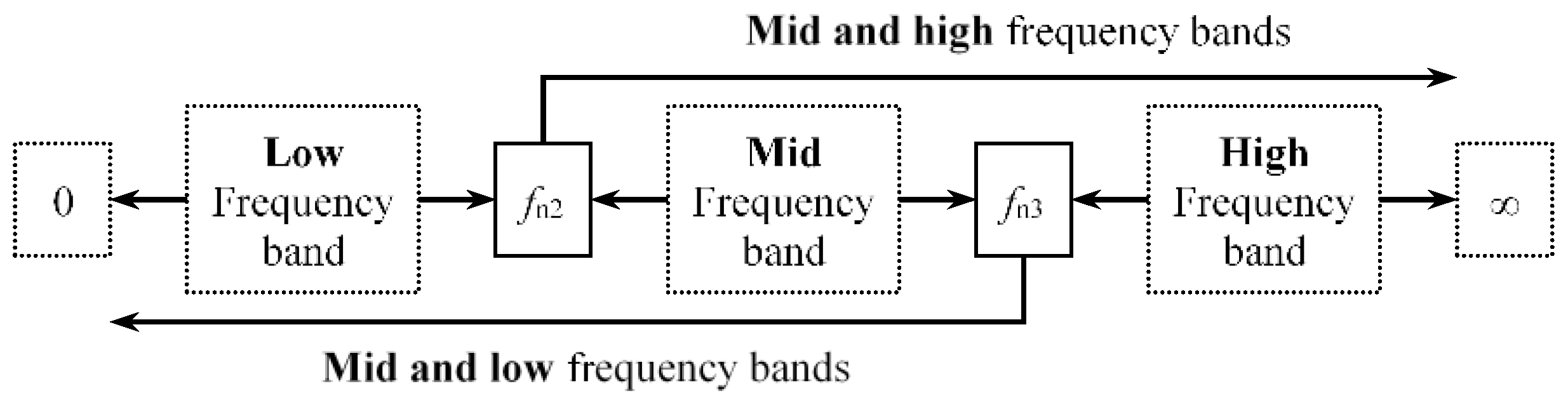
2.2. Dynamics of the Active Hydraulic Mount and Frequency Band Definition
3. Mathematical Model Simplification and Distinct Features of Passive Dynamics
3.1. Mathematical Model Simplification in Different Frequency Bands
3.2. Distinct Features of Passive Dynamics and Verification for Model Simplification Method
4. Mathematical Model and Distinct Features of Active Dynamics
4.1. Mathematical Model of Active Dynamics in Two Different States
4.2. Distinct Features of Active Dynamics in Fluid-Filled State
4.3. Distinct Features of Active Dynamics in Non-Fluid State
5. Experimental Validation and Parameters Identification
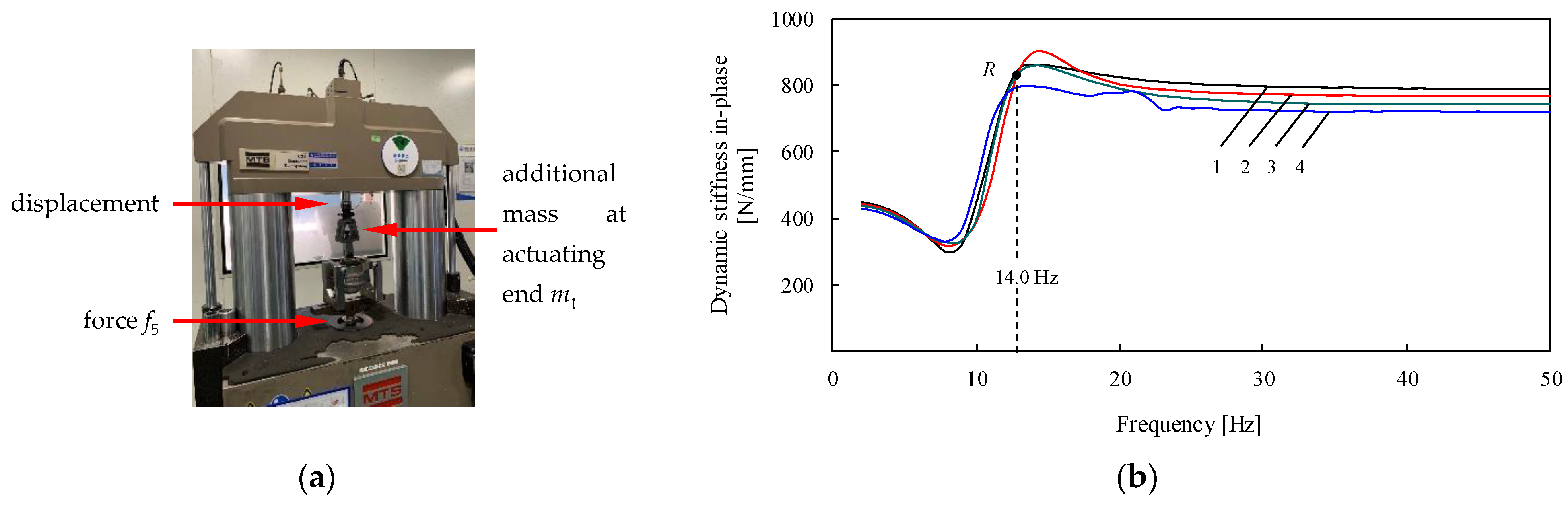
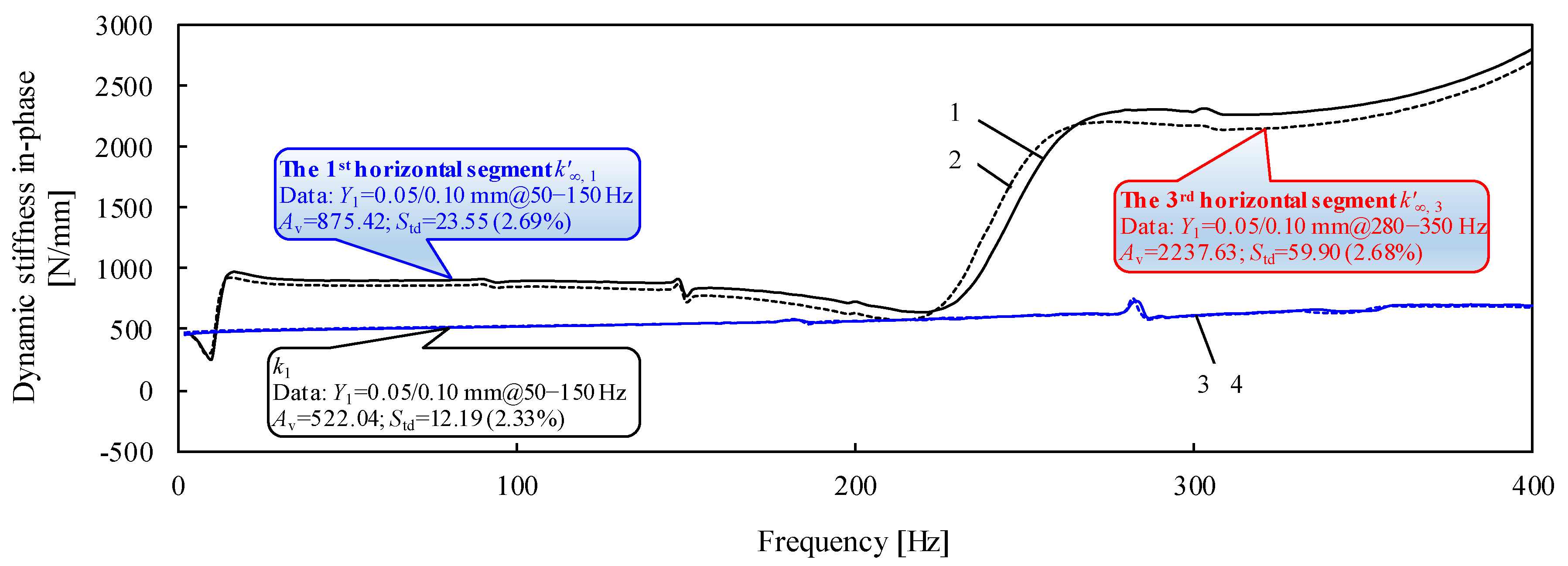
5.1. Passive Dynamics Test and Parameters Identification
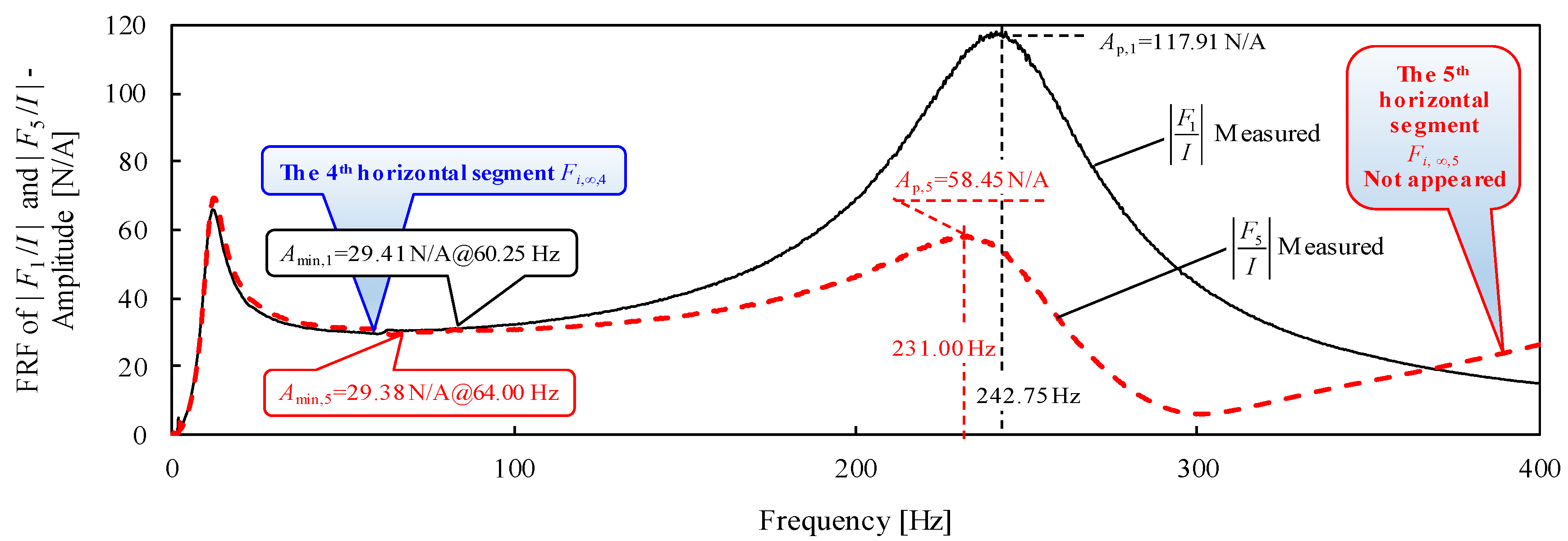
5.2. Active Dynamics Test in Fluid-Filled State and Parameters Identification
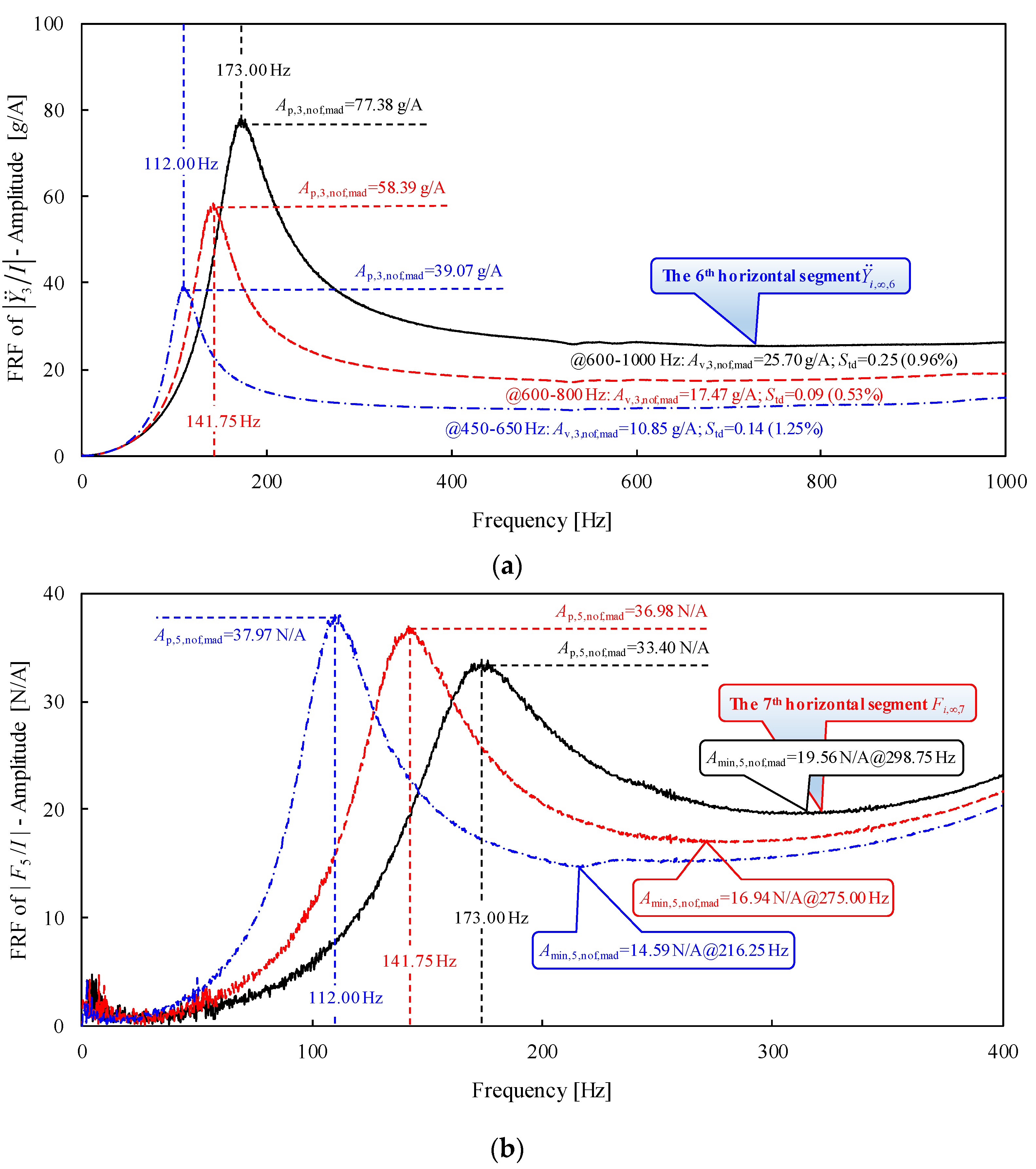
5.3. Active Dynamics Test in Non-Fluid State and Parameters Identification
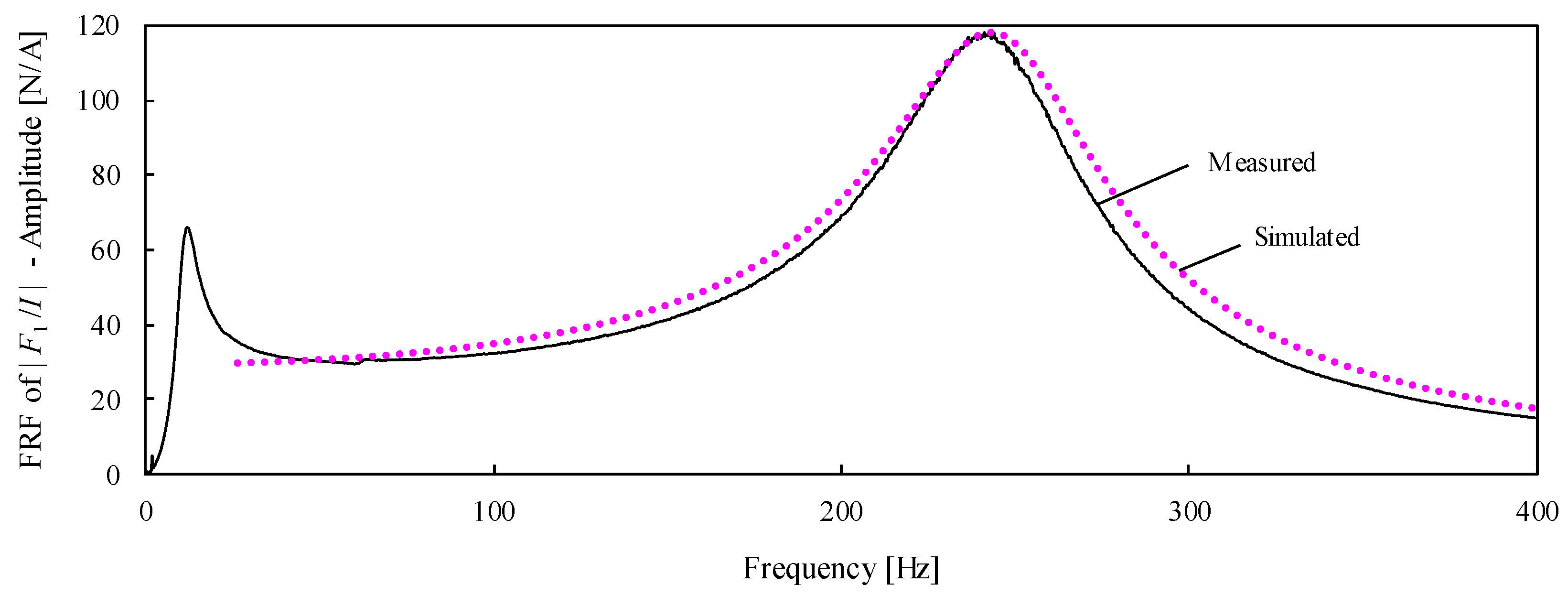
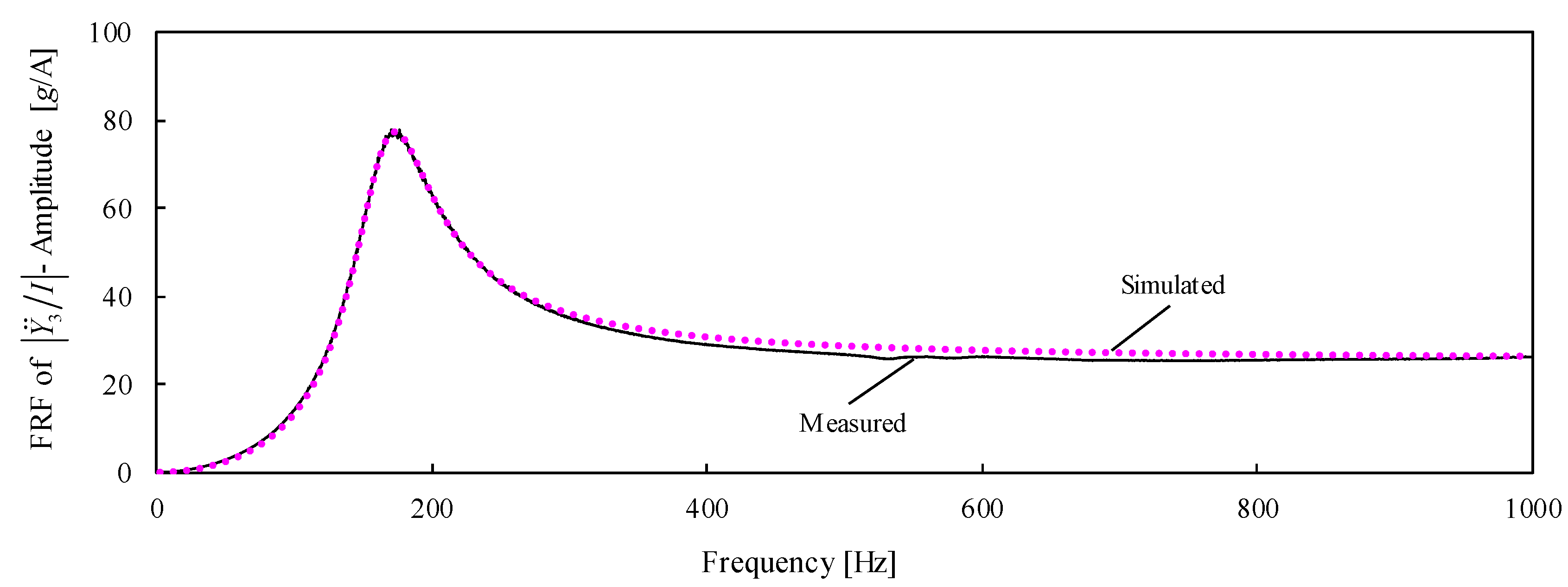
5.4. Simulation of Active Dynamics Based on the Identified Parameters
6. Conclusions
- (1)
- Distinct features of the dynamics and key parameter identification were systematically investigated based on a nonlinear lumped parameter model of the AHM-IT-DM-OCA. A method for simplifying the mathematical model is proposed in the low-, mid-, and high-frequency bands, which are divided into two resonance frequencies of the fluid channel and actuator mover. The simplified model in the mid- and high-frequency bands is linear, which is attributed to the negligible nonlinear factors of the fluid channel and the linear output of the actuator.
- (2)
- The distinct features of the dynamics, which include three resonances and seven horizontal segments, are revealed. Experimental validations based on a series of tests have shown only three resonances of the fluid channel and actuator mover, and the 1st, 4th, and 6th horizontal segments can be applied to identify all key parameters owing to the limitations of the test equipment and low fixture modalities.
- (3)
- The distinct features of passive and active dynamics in fluid-filled and non-fluid states should be analyzed successively rather than independently. Passive dynamics are the foundation that provide a method for model simplification and basic parameters. The active dynamics in the non-fluid state are extensions of the identification of all key parameters, which decouples the complex items composed of multiple key parameters. A complete procedure for the identification of all six key parameters is established based on the distinct features of the dynamics. This is compared with previous study’s identification of only two parameters based on the fixed point of passive dynamics.
- (4)
- The consistency of the key parameters identified by the procedure is presented based on experiments with different added masses. The physical rationality is presented by comparing the results under fluid-filled and non-fluid states. The correctness is demonstrated by the agreement between the simulated active dynamics and the experimental ones. All key parameters identified by this systematic method are sufficiently accurate to be applied for future research on algorithms and the performance of active control.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| A1 | equivalent piston area of the main rubber spring (mm2) |
| A2 | cross-sectional area of the inertia track (mm2) |
| A3 | equivalent piston area of the decoupler membrane (mm2) |
| Amin,1 | minimum estimate of Fi,∞,4 (N⋅A−1) |
| Av | average estimate of near the lowest point (g⋅A−1) |
| B | magnetic induction intensity (T) |
| c | viscous damping (N⋅s⋅m−1) |
| c1 | viscous damping of the main rubber spring (N⋅s⋅m−1) |
| c3 | viscous damping of the actuator mover in the fluid-filled state (N⋅s⋅m−1) |
| c3,nof | viscous damping of actuator mover in the non-fluid state (N⋅s⋅m−1) |
| d2 | hydraulic diameter of the inertia track (mm), |
| g | acceleration of gravity (m⋅s−2) |
| f | excitation frequency (Hz) |
| f1 | reaction force on the engine side (N) |
| F1 | response force amplitude of (N) |
| f5 | force transmitted to the body side (N) |
| F5 | response force amplitude of (N) |
| fa | actuator active force (N) |
| fn2 | natural frequency of the inertia track (Hz) |
| fn3 | natural frequency of the actuator mover in the fluid-filled state (Hz) |
| fn3,nof | natural frequency of the actuator mover without added mass in the non-fluid state (Hz) |
| fn3,nof,mad | natural frequency of the actuator mover with added mass when testing in the non-fluid state (Hz) |
| fp,3,nof | peak frequency of (Hz) |
| fp,5,nof | peak frequency of (Hz) |
| fR | frequency of the fixed-point R of frequency- and amplitude-variant passive dynamic stiffness in-phase (Hz) |
| j | imaginary unit, |
| k*, k, k′, k″ | dynamic stiffness and its modulus, dynamic stiffness in-phase and out-of-phase (N⋅mm−1), respectively, |
| k1 | dynamic stiffness in-phase of the main rubber spring (N⋅mm−1) |
| K1 | dynamic bulk stiffness of the main rubber spring (GN⋅m−5) |
| K2 | dynamic bulk stiffness of the lower fluid chamber (GN⋅m−5), |
| k3 | dynamic stiffness in-phase of the decoupler membrane (N⋅mm−1), |
| K3 | dynamic bulk stiffness of the decoupler membrane (GN⋅m−5) |
| kM | voice coil constant (T⋅m = kg⋅m⋅A−1⋅s−2=N⋅A−1), |
| Ku1 | dynamic bulk stiffness of the upper fluid chamber (GN⋅m−5) |
| l | coil length (m) |
| l2 | length of the inertia track (mm) |
| L2 | wet perimeter of the cross-sectional area of the inertia track (mm) |
| m1 | mass at the engine side (kg) |
| m2 | mass of fluid in the inertia track (g), |
| m3 | total mass of the actuator mover including attached fluid in the fluid-filled state (g) |
| m3,nof | net mass of the actuator mover in the non-fluid state (g) |
| m3,nof,mad | mass of the actuator mover including added mass when testing in the non-fluid state (g), |
| mad | added mass to the actuator mover when testing in the non-fluid state (g) |
| p1 | dynamic fluid pressure in the upper chamber (Pa) |
| p2 | dynamic fluid pressure in the lower chamber (Pa), |
| R | fixed point of frequency- and amplitude-variant dynamic stiffness in-phase |
| y1 | excitation displacement applied at the engine side of the mount (mm) |
| Y1 | amplitude of (mm) |
| y2 | reaction displacement of inertia fluid (mm) |
| Y2 | amplitude of (mm) |
| y3 | reaction displacement of the mover (mm) |
| y5 | displacement at the body/chassis side (mm) |
| 1st horizontal segment in drive-point/cross-point passive dynamic stiffness in-phase in the mid-frequency band (N⋅mm−1), | |
| 2nd horizontal segment in drive-point passive dynamic stiffness in-phase in the high-frequency band (N⋅mm−1), | |
| 3rd horizontal segment in cross-point passive dynamic stiffness in-phase in the high-frequency band (N⋅mm−1), | |
| Fi,∞,4 | 4th horizontal segment in active FRFs in the mid-frequency band in the fluid-filled state (N⋅A−1), , |
| Fi,∞,5 | 5th horizontal segment in active FRF in the high-frequency band in the fluid-filled state (N⋅A−1), |
| 6th horizontal segment in active FRF in the high-frequency band in the non-fluid state (g⋅A−1), | |
| Fi,∞,7 | 7th horizontal segment in active FRF in the high-frequency band in the non-fluid state (N⋅A−1), |
| Ap,1, fp,1, λp,1 | peak value of active FRF in the mid-high-frequency bands in the fluid-filled state (N⋅A−1) and the corresponding frequency (Hz) and frequency ratio |
| Ap,3,nof,mad, fp,3,nof,mad, λp,3,nof,mad | peak value of active FRF in the mid-high-frequency bands in the non-fluid state (g⋅A−1) and the corresponding frequency (Hz) and frequency ratio |
| Ap,5,nof,mad, fp,5,nof,mad, λp,5,nof,mad | peak value of active FRF in the mid-high-frequency bands in the non-fluid state (N⋅A−1) and the corresponding frequency (Hz) and frequency ratio |
| φ | loss angle |
| λ | frequency ratio, |
| λ2 | frequency ratio, |
| λ3 | frequency ratio in the fluid-filled state, |
| λ3,nof | frequency ratio in the non-fluid state, |
| μ | fluid viscosity (Pa⋅s) |
| ρ | fluid density (kg⋅m−3) |
| ω | excitation angular frequency (rad⋅s−1) |
| ωn2 | nature angular frequency of inertia track (rad⋅s−1) |
| ωn3 | nature angular frequency of the actuator mover in the fluid-filled state (rad⋅s−1) |
| ωn3,nof | nature angular frequency of the actuator mover without added mass in the non-fluid state (rad⋅s−1) |
| ξ3 | damping ratio of the decoupler/mover system in the fluid-filled state |
| ξ3,nof | damping ratio of the decoupler/mover system without added mass in the non-fluid state |
| ξ3,nof,mad | damping ratio of the decoupler/mover system with added mass in the non-fluid state |
| local loss factor of fluid flowing at the entrance and outlet of the inertia track | |
| loss factor of fluid flowing along the inertia track | |
| AHM | active hydraulic mount |
| AHM-IT-DM-OCA | active hydraulic mount with an inertia track, decoupler membrane and oscillating coil actuator |
| DM | decoupler membrane |
| DOF | degree-of-freedom |
| FRF | frequency-response function |
| IT | inertia track |
| mad | added mass for the active dynamics test of AHM-IT-DM-OCA in the non-fluid state |
| nof | non-fluid state for active dynamics analysis and test of AHM-IT-DM-OCA |
| OCA | oscillating coil actuator |
| PHM-IT-DM | passive hydraulic mount with an inertia track and decoupler membrane |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Data Source or Formula | Values | |||
|---|---|---|---|---|---|
| *: Parameters for the model in Figure 2. | * 1: Italic font for original data; * 2: Regular font for experimental data; * 3: Bold font for identified data. | ||||
| 1. Original data | |||||
| 1000.00 *,1 | ||||
| 328.80 | ||||
| 92.50 | ||||
| 14.00 | ||||
| 9.80 | ||||
| 2. Refers to Section 5.1. Parameter identification based on passive dynamics | |||||
| Figure 5 | 522.04 *,2 | |||
| Test result | 17.90 | |||
| Figure 4 | 14.00 | |||
| Figure 5 | 875.42 | |||
| (11) | 14.00 *,3 | |||
| (2) | 27.50 | |||
| (11) | 3584.40 | |||
| 3. Refers to Section 5.2. Parameter identification based on active dynamics (in fluid-filled state) | |||||
| Figure 6 | 29.41 | |||
| Figure 6 | 117.91 | |||
| Figure 6 | 242.75 | |||
| (19) | 4.69 × 107 | |||
| (21) | 0.1257 | |||
| (21) | 246.68 | |||
| 4. Refers to Section 5.3. Parameter identification based on active dynamics (in non-fluid state) | mad,1 | mad,2 | mad,3 | ||
| Figure 7a | 8.90 | 38.97 | 93.03 | |
| Figure 7a | 25.70 | 17.47 | 10.85 | |
| Figure 7a | 77.38 | 58.39 | 39.07 | |
| Figure 7a | 173.00 | 141.75 | 112.00 | |
| (23) | 55.58 | 81.79 | 131.64 | |
| (23) | 0.1685 | 0.1513 | 0.1402 | |
| (24) | 168.02 | 138.47 | 109.77 | |
| (22) | 61.95 | 61.91 | 62.62 | |
| (23) | 19.77 | 21.53 | 25.47 | |
| 46.68 | 42.82 | 38.61 | ||
| (22) | 183.33 | 191.37 | 202.70 | |
| (23) | 0.1838 | 0.2091 | 0.2590 | |
| 5. Further identification based on identified parameters values above | |||||
| (1) | 1320.03 | 1319.21 | 1334.48 | |
| (1) | 35.55 | 35.57 | 35.17 | |
| (4) | 121.53 | 121.27 | 126.25 | |
| (3) | 113.93 | 113.62 | 119.66 | |
| (12) | 44.40 | 44.28 | 46.63 | |
| (12) | 2.10 | 2.10 | 2.10 | |
References
- Chakrabarti, S.; Dapino, M.J. Design and modeling of a hydraulically amplified magnetostrictive actuator for automotive engine mounts. In Proceedings of the SPIE 7645, the Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 29 March 2010. [Google Scholar] [CrossRef]
- Kraus, R.; Millitzer, J.; Hansmann, J.; Wolter, S.; Jackel, M. Experimental study on active noise and active vibration control for a passenger car using novel piezoelectric engine mounts and electro dynamic inertial mass actuators. In Proceedings of the ICAST 2014—25th International Conference on Adaptive Structures and Technologies, The Hague, The Netherlands, 6 October 2014. [Google Scholar]
- Foumani, M.S.; Khajepour, A.; Durali, M. Application of Shape Memory Alloys to a New Adaptive Hydraulic Mount. In Proceedings of the International Body Engineering Conference & Exhibition and Automotive & Transportation Technology Congress, Paris, France, 9–11 July 2002. [Google Scholar] [CrossRef]
- Hausberg, F.; Scheiblegger, C.; Pfeffer, P.; Plöchl, M.; Hecker, S.; Rupp, M. Experimental and analytical study of secondary path variations in active engine mounts. J. Sound Vib. 2015, 340, 22–38. [Google Scholar] [CrossRef]
- Hausberg, F.; Plöchl, M.; Rupp, M.; Pfeffer, P.; Hecker, S. Combination of map-based and adaptive feedforward control algorithms for active engine mounts. J. Vib. Control 2017, 23, 3092–3107. [Google Scholar] [CrossRef]
- Christopherson, J.; Jazar, G.N. Dynamic behavior comparison of passive hydraulic engine mounts. Part 2: Finite element analysis. J. Sound Vib. 2006, 290, 1071–1090. [Google Scholar] [CrossRef]
- Zhou, D.; Zuo, S.; Wu, X. A Lumped Parameter Model Concerning the Amplitude-Dependent Characteristics for the Hydraulic Engine Mount with a Suspended Decoupler. SAE Tech. Pap. 2019, 1, 936. [Google Scholar] [CrossRef]
- Wang, L.-R.; Wang, J.-C.; Hagiwara, I. An integrated characteristic simulation method for hydraulically damped rubber mount of vehicle engine. J. Sound Vib. 2005, 286, 673–696. [Google Scholar] [CrossRef]
- Wang, L.-R.; Wang, J.-C.; Lu, Z.-H.; Hagiwara, I. Finite element-based parameter estimations for a characteristic simulation model of a hydraulically damped rubber mount for vehicle engines. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2007, 221, 1273–1286. [Google Scholar] [CrossRef]
- Shi, W.-K.; Mao, Y.; Jiang, X.; Chen, Z.-Y.; Pan, B. Parameter identification and dynamic characteristics of semi-active hydraulic mount. J. Jilin Univ. 2014, 44, 605–611. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, J.; Shangguan, W.-B. Modeling and experimental study of a passive hydraulic engine mount with inertia and direct-Decoupler. Chin. J. Mech. Eng. 2008, 21, 31–35. [Google Scholar] [CrossRef]
- Guo, R.; Wei, X.-K.; Zhou, S.-Q.; Gao, J. Parametric identification study of an active engine mount: Combination of finite element analysis and experiment. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 427–439. [Google Scholar] [CrossRef]
- Kyprianou, A.; Giacomin, J.; Worden, K.; Heidrich, M.; Bocking, J. Differential evolution based identification of automotive hydraulic engine mount model parameters. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2000, 214, 249–264. [Google Scholar] [CrossRef]
- Zheng, L.; Liu, Q.-B.; You, Z.-L.; Pang, J.; Xu, X.-M.; Chen, D.-J. Development of Modified Lumped Parameter Model involving Amplitude-dependence Characteristics on Semi-active Engine Mount and Experimental Verification. Chin. J. Mech. Eng. 2017, 53, 98–105. [Google Scholar] [CrossRef]
- Chen, S.-W.; Li, R.; Du, P.-F.; Zheng, H.-W.; Li, D.-Y. Parametric Modeling of a Magnetorheological Engine Mount Based on a Modified Polynomial Bingham Model. Front. Mater. 2019, 6, 68. [Google Scholar] [CrossRef]
- He, S.; Rajendra, R. Estimation of amplitude and frequency dependent parameters of hydraulic engine mount given limited dynamic stiffness measurements. Noise Control Eng. J. 2005, 53, 271–285. [Google Scholar] [CrossRef]
- Li, L. Study of the Lumped Parameter Models and Parameters Identification of Hydraulic Bushing. Appl. Mech. Mater. 2013, 321, 1805–1811. [Google Scholar] [CrossRef]
- Manikantan, R.; Chakraborty, S.; Uchida, T.K.; Vyasarayani, C.P. Parameter Identification in Nonlinear Mechanical Systems with Noisy Partial State Measurement Using PID-Controller Penalty Functions. Mathematics 2020, 8, 1084. [Google Scholar] [CrossRef]
- Chai, T.; Dreyer, J.T.; Singh, R. Time domain responses of hydraulic bushing with two flow passages. J. Sound Vib. 2014, 333, 693–710. [Google Scholar] [CrossRef]
- Chai, T.; Dreyer, J.T.; Singh, R. Frequency domain properties of hydraulic bushing with long and short passages: System identification using theory and experiment. Mech. Syst. Signal Process. 2015, 56, 92–108. [Google Scholar] [CrossRef]
- Yang, C.-F.; Yin, Z.-H.; Shangguan, W.-B.; Duan, X.-C. A Study on the Dynamic Performance for Hydraulically Damped Rubber Bushings with Multiple Inertia Tracks and Orifices: Parameter Identification and Modeling. Shock Vib. 2016, 2016, 3695950. [Google Scholar] [CrossRef] [Green Version]
- Fan, R.-L.; Dou, Y.-F.; Ma, F.-L. Fixed Points on Active and Passive Dynamics of Active Hydraulic Mounts with Oscillating Coil Actuator. Actuators 2021, 10, 225. [Google Scholar] [CrossRef]
- Fan, R.-L.; Fei, Z.-N.; Zhou, B.-Y.; Gong, H.-B.; Song, P.-J. Two-step dynamics of a semiactive hydraulic engine mount with four-chamber and three-fluid-channel. J. Sound Vib. 2020, 480, 115403. [Google Scholar] [CrossRef]
- Gao, Z.-Q.; Wang, B.-R. Fluid Mechanics; Science Press: Beijing, China, 2017. [Google Scholar]
- Fan, R.-L.; Lu, Z.-H. Fixed points on the nonlinear dynamic properties of hydraulic engine mounts and parameter identification method: Experiment and theory. J. Sound Vib. 2007, 305, 703–727. [Google Scholar] [CrossRef]
- Zhang, Y.-M. Mechanical Vibrations; Tsinghua University Press: Beijing, China, 2019. [Google Scholar]
- Li, Y.; Jiang, J.-Z.; Neild, S.A. Optimal fluid passageway design methodology for hydraulic engine mounts considering both low and high frequency performances. J. Vib. Control 2019, 25, 2749–2757. [Google Scholar] [CrossRef]

| Dynamics | Input | Output | Distinct Features | Key Parameters Identification | |||
|---|---|---|---|---|---|---|---|
| fn2 | fn2 << f << fn3 | fn3 or fn3,nof | f >> fn3 | ||||
| Passive dynamics | Engine-side displacement Y1 | Engine-side force F1 | fR | / | A1 Ku1 | ||
| Chassis-side force F5 | fR | / | |||||
| Active dynamics (fluid-filled) | Actuator current I | Engine-side force F1 | / | fp,1, Ap,1 | 0 | A3K3 | |
| Chassis-side force F5 | / | / | |||||
| Active dynamics (non-fluid) | Actuator current I | / | / | fp,3,nof, Ap,3,nof | K1, A3, K3 m3, c3 | ||
| Chassis-side force F5 | / | / | fp,3,nof, Ap,5,nof | ||||
| 4.1. Added Mass, mad (g) | mad,1 | mad,2 | mad,3 | Consistency of Obtained Results | ||
|---|---|---|---|---|---|---|
| 8.90 | 38.97 | 93.03 | Mean | Standard Deviation | Relative Std | |
| 61.95 | 61.91 | 62.62 | 62.16 | 0.40 | 0.64% |
| 1320.03 | 1319.21 | 1334.48 | 1324.57 | 8.61 | 0.65% |
| 35.55 | 35.57 | 35.17 | 35.43 | 0.23 | 0.64% |
| 121.53 | 121.27 | 126.25 | 123.02 | 2.80 | 2.28% |
| 113.93 | 113.62 | 119.66 | 115.74 | 3.40 | 2.94% |
| 44.40 | 44.28 | 46.63 | 45.10 | 1.32 | 2.93% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, R.-L.; Fei, Z.-N. Identification of Dynamic Parameters and Frequency Response Properties of Active Hydraulic Mount with Oscillating Coil Actuator: Theory and Experiment. Appl. Sci. 2022, 12, 8547. https://doi.org/10.3390/app12178547
Fan R-L, Fei Z-N. Identification of Dynamic Parameters and Frequency Response Properties of Active Hydraulic Mount with Oscillating Coil Actuator: Theory and Experiment. Applied Sciences. 2022; 12(17):8547. https://doi.org/10.3390/app12178547
Chicago/Turabian StyleFan, Rang-Lin, and Zhen-Nan Fei. 2022. "Identification of Dynamic Parameters and Frequency Response Properties of Active Hydraulic Mount with Oscillating Coil Actuator: Theory and Experiment" Applied Sciences 12, no. 17: 8547. https://doi.org/10.3390/app12178547
APA StyleFan, R.-L., & Fei, Z.-N. (2022). Identification of Dynamic Parameters and Frequency Response Properties of Active Hydraulic Mount with Oscillating Coil Actuator: Theory and Experiment. Applied Sciences, 12(17), 8547. https://doi.org/10.3390/app12178547