
Electromagnetic Force Induced Structural Vibration Analysis and Experiment of Brushless Direct Current Motors for Operating Speed Range


Abstract
:1. Introduction
2. Modal Analysis and Test of BLDC Motors Considering all Motor Components
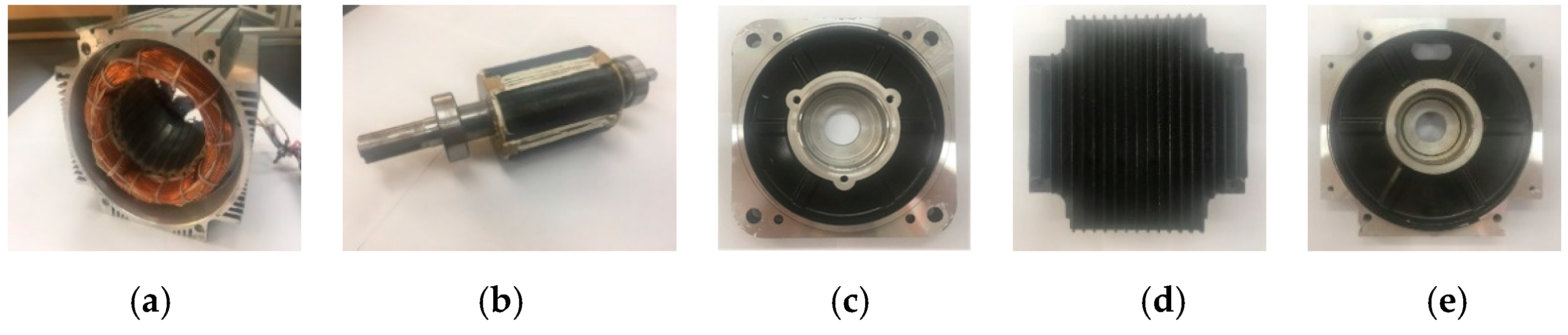
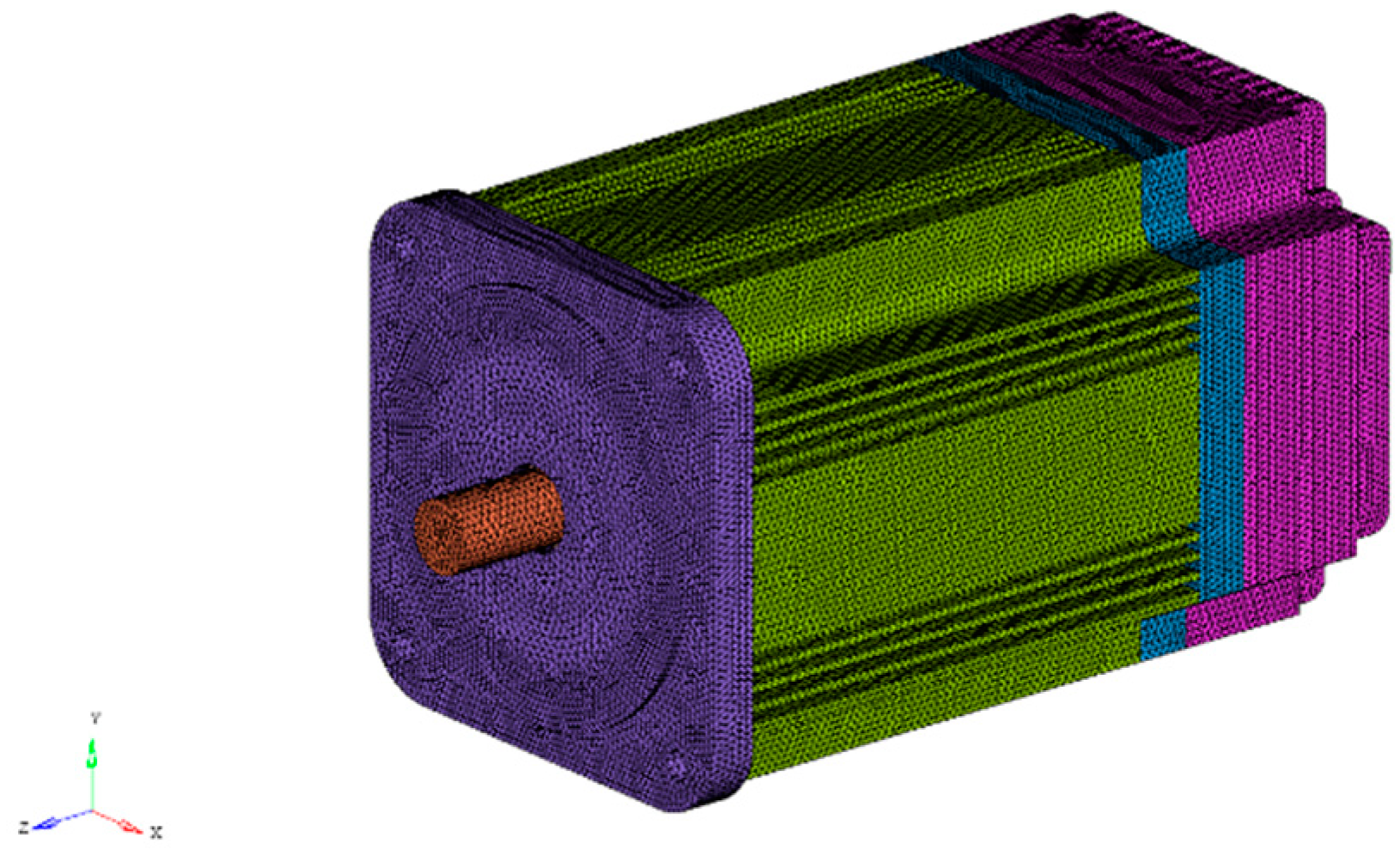
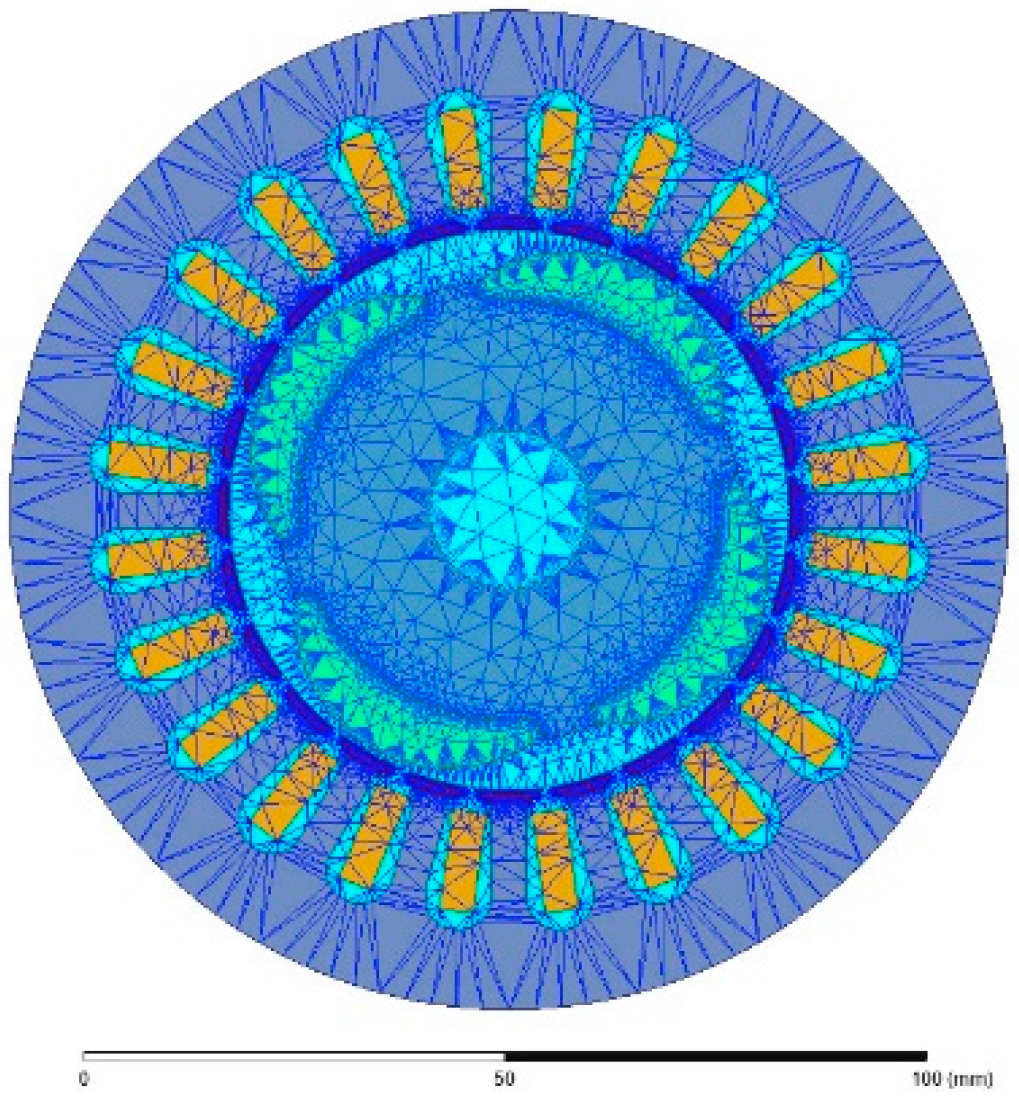
2.1. 3-D Entire Finite Element Model of BLDC Motors
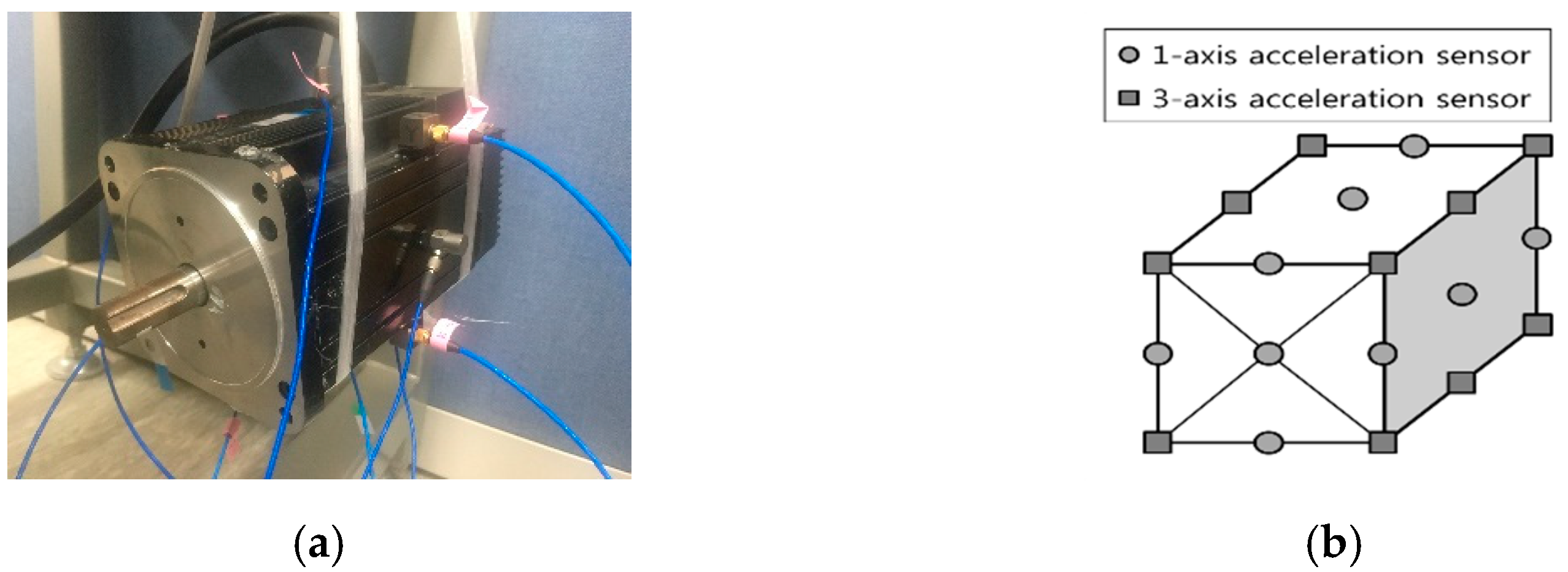
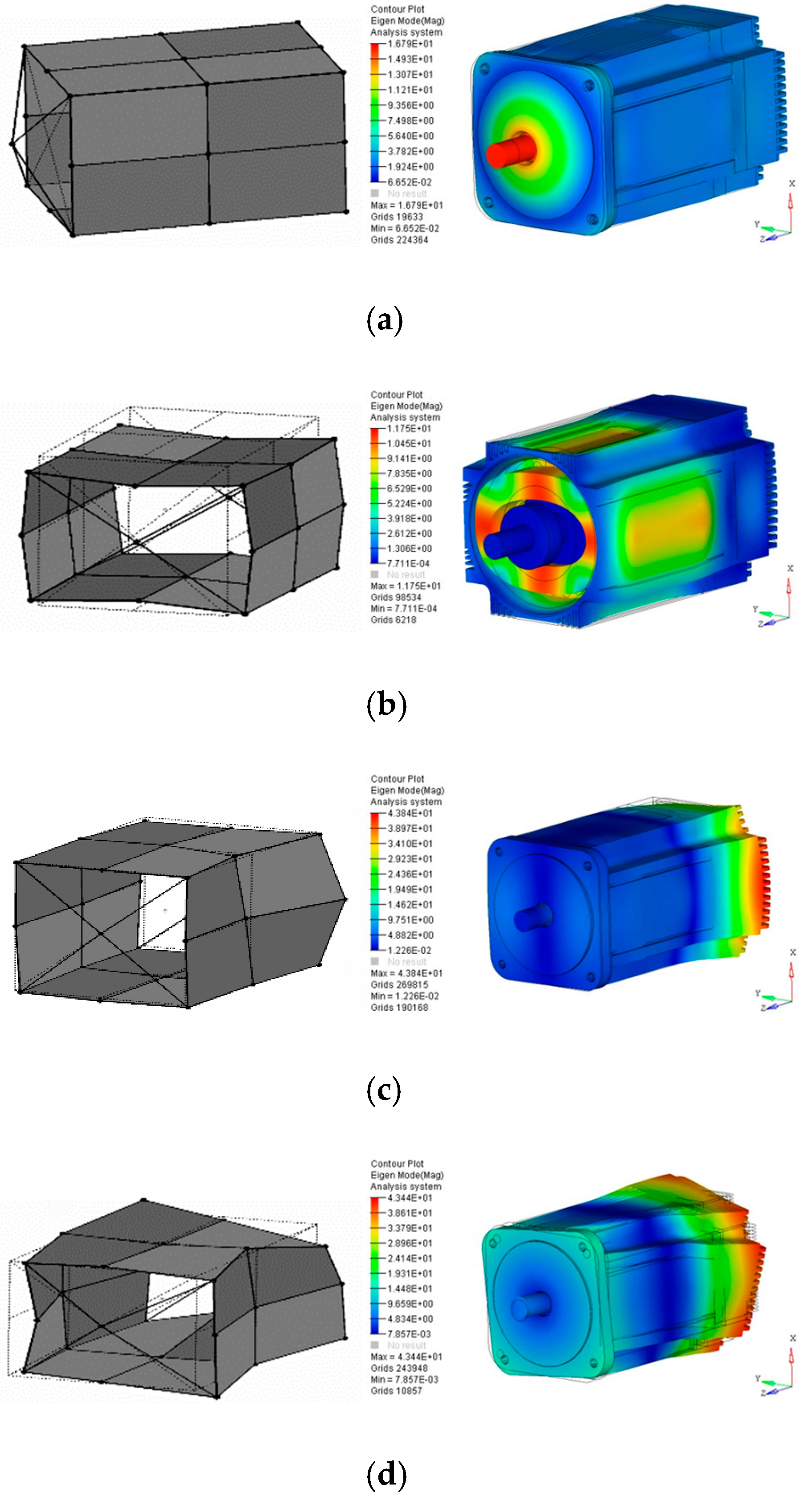
2.2. Normal Mode Analysis and Test
3. Vibration Analysis and Experiment at Operating Speed Range
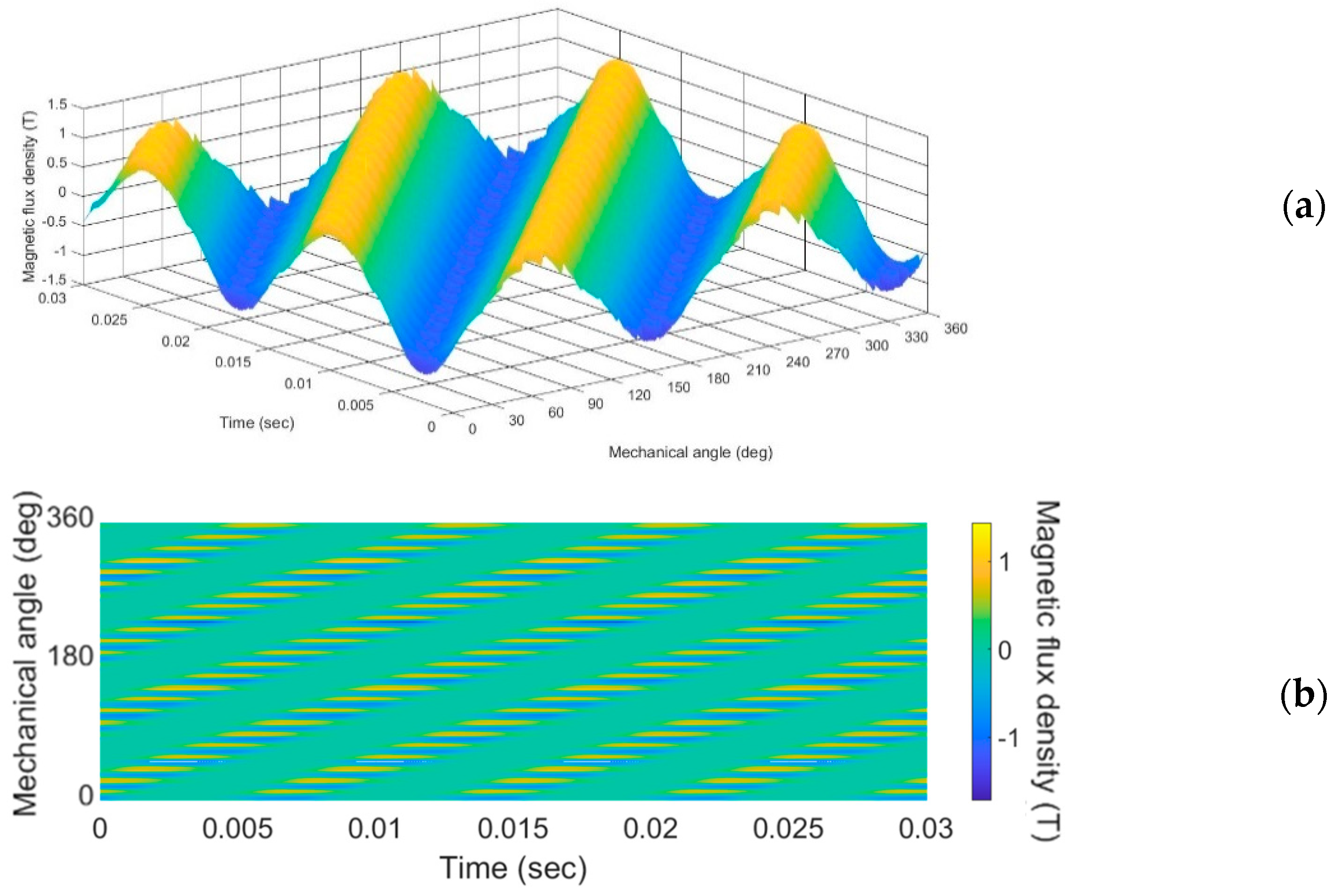
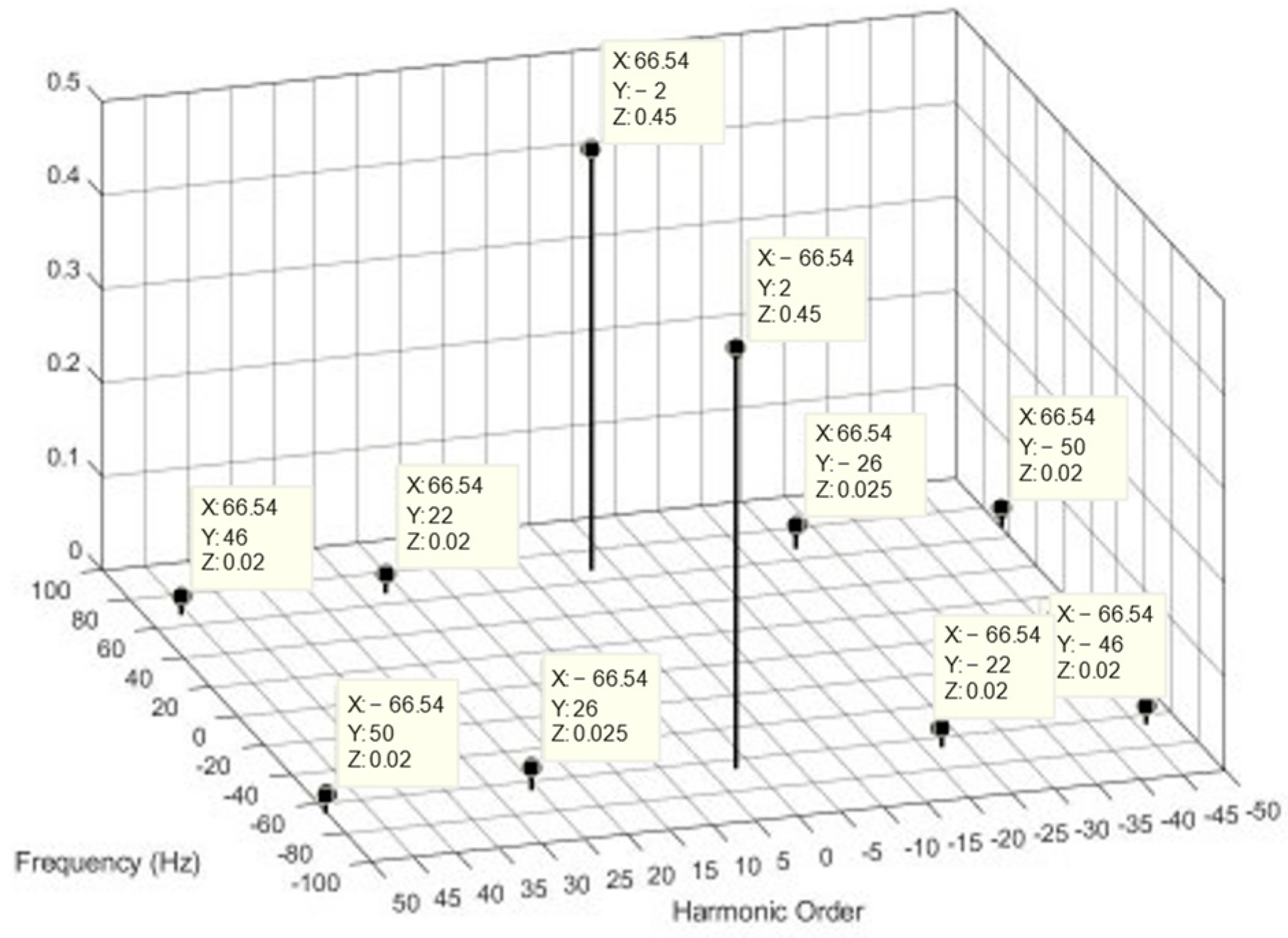
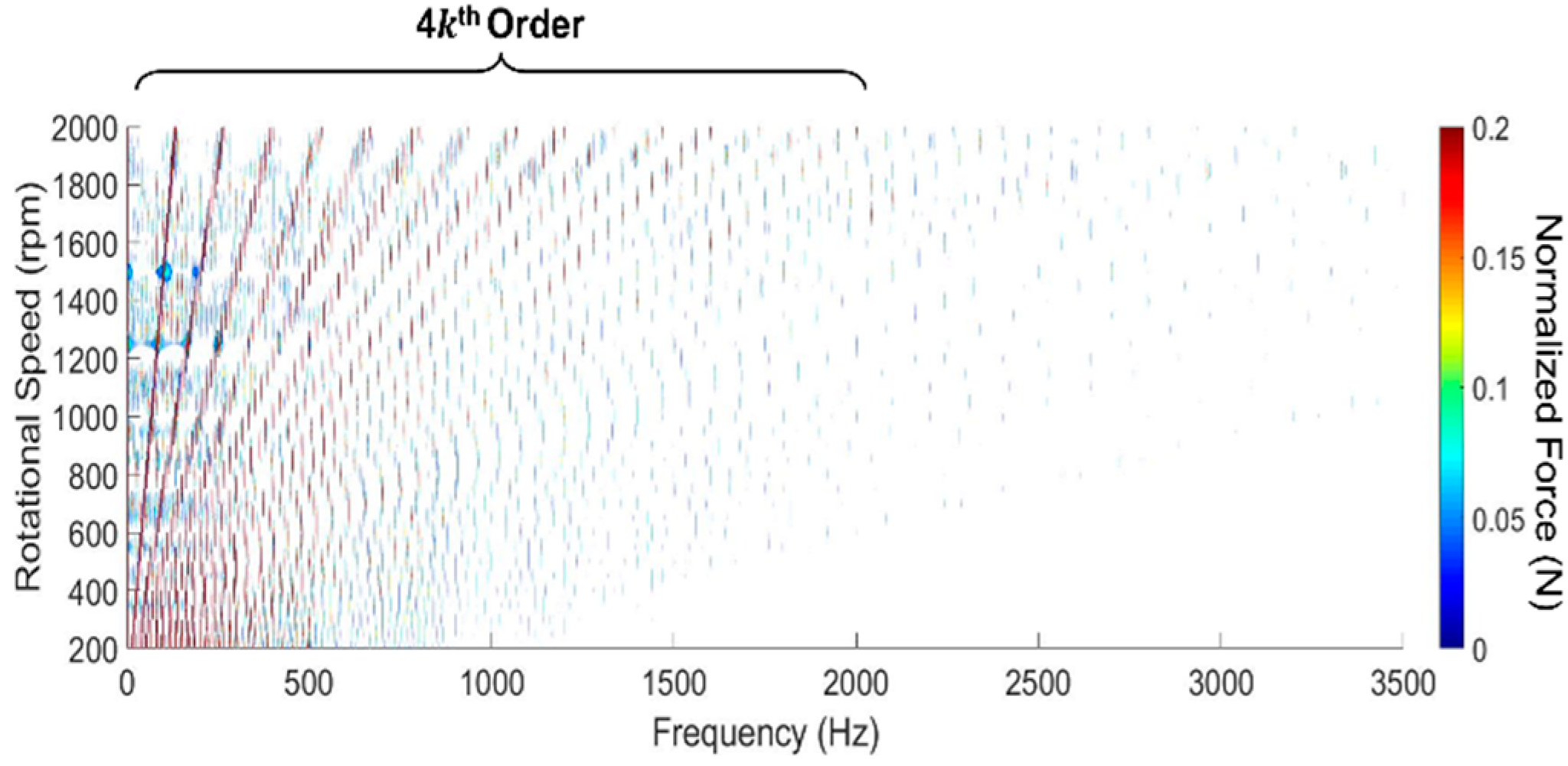
3.1. Electromagnetic Force Analysis for Operating Speed Range
3.2. Electromagnetic Force Induced Vibration Analysis for the Operating Speed Range
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mori, D.; Ishikawa, T. Force and vibration analysis of induction motors. IEEE Trans. Magn. 2005, 41, 1948–1951. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Xia, Z.P.; Wu, L.J.; Jewell, G.W. Influence of slot and pole number combination on radial force and vibration modes in fractional slot PM brushless machines having single-and double-layer windings. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 3443–3450. [Google Scholar]
- Verez, G.; Barakat, G.; Amara, Y.; Hoblos, G. Impact of pole and slot combination on vibrations and noise of electromagnetic origins in permanent magnet synchronous motors. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Tsypkin, M. The origin of the electromagnetic vibration of induction motors operating in modern industry: Practical experience—Analysis and diagnostics. IEEE Trans. Ind. Appl. 2016, 53, 1669–1676. [Google Scholar] [CrossRef]
- Kobayashi, T.; Tajima, F.; Ito, M.; Shibukawa, S. Effects of slot combination on acoustic noise from induction motors. IEEE Trans. Magn. 1997, 33, 2101–2104. [Google Scholar] [CrossRef]
- Kim, B.T.; Kwon, B.I.; Park, S.C. Reduction of electromagnetic force harmonics in asynchronous traction motor by adapting the rotor slot number. IEEE Trans. Magn. 1999, 35, 3742–3744. [Google Scholar]
- Hwang, S.M.; Lee, H.J.; Kim, T.S.; Jung, Y.H.; Hong, J.P. The influence of electromagnetic force upon the noise of an IPM motor used in a compressor. IEEE Trans. Magn. 2006, 42, 3494–3496. [Google Scholar] [CrossRef]
- Lee, S.H.; Hong, J.P.; Hwang, S.M.; Lee, W.T.; Lee, J.Y.; Kim, Y.K. Optimal design for noise reduction in interior permanent-magnet motor. IEEE Trans. Ind. Appl. 2009, 45, 1954–1960. [Google Scholar]
- Jung, J.W.; Lee, S.H.; Lee, G.H.; Hong, J.P.; Lee, D.H.; Kim, K.N. Reduction design of vibration and noise in IPMSM type integrated starter and generator for HEV. IEEE Trans. Magn. 2010, 46, 2454–2457. [Google Scholar] [CrossRef]
- Yu, S.; Tang, R. Electromagnetic and mechanical characterizations of noise and vibration in permanent magnet synchronous machines. IEEE Trans. Magn. 2006, 42, 1335–1338. [Google Scholar]
- Islam, R.; Husain, I. Analytical model for predicting noise and vibration in permanent-magnet synchronous motors. IEEE Trans. Ind. Appl. 2010, 46, 2346–2354. [Google Scholar] [CrossRef]
- Yim, K.H.; Jang, J.W.; Jang, G.H.; Kim, M.G.; Kim, K.N. Forced vibration analysis of an IPM motor for electrical vehicles due to magnetic force. IEEE Trans. Magn. 2012, 48, 2981–2984. [Google Scholar] [CrossRef]
- Yang, H.; Chen, Y. Influence of radial force harmonics with low mode number on electromagnetic vibration of PMSM. IEEE Trans. Energy Convers. 2013, 29, 38–45. [Google Scholar] [CrossRef]
- Torregrossa, D.; Fahimi, B.; Peyraut, F.; Miraoui, A. Fast computation of electromagnetic vibrations in electrical machines via field reconstruction method and knowledge of mechanical impulse response. IEEE Trans. Ind. Electron. 2011, 59, 839–847. [Google Scholar] [CrossRef]
- Torregrossa, D.; Paire, D.; Peyraut, F.; Fahimi, B.; Miraoui, A. Active mitigation of electromagnetic vibration radiated by PMSM in fractional-horsepower drives by optimal choice of the carrier frequency. IEEE Trans. Ind. Electron. 2010, 59, 1346–1354. [Google Scholar] [CrossRef]
- Islam, M.S.; Islam, R.; Sebastian, T. Noise and vibration characteristics of permanent-magnet synchronous motors using electromagnetic and structural analyses. IEEE Trans. Ind. Appl. 2014, 50, 3214–3222. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.; Wu, X. Electromagnetic vibration and noise analysis of permanent magnet synchronous motor with different slot-pole combinations. IET Electr. Power Appl. 2016, 10, 900–908. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.; Deng, W.; Wu, S. Modeling and analysis of electromagnetic force, vibration, and noise in permanent-magnet synchronous motor considering current harmonics. IEEE Trans. Ind. Electron. 2016, 63, 7455–7466. [Google Scholar] [CrossRef]
- Hong, J.; Wang, S.; Sun, Y.; Sun, X.; Cao, H. Piecewise stagger poles with continuous skew edge for vibration reduction in surface-mounted PM synchronous machines. IEEE Trans. Ind. Electron. 2020, 68, 8498–8506. [Google Scholar] [CrossRef]
- Wang, S.; Hong, J.; Sun, Y.; Cao, H. Mechanical and magnetic pivot roles of tooth in vibration of electrical machines. IEEE Trans. Energy Convers. 2020, 36, 139–148. [Google Scholar] [CrossRef]
- Lan, H.; Zou, J.; Xu, Y.; Liu, M. Effect of local tangential force on vibration performance in fractional-slot concentrated winding permanent magnet synchronous machines. IEEE Trans. Energy Convers. 2018, 34, 1082–1093. [Google Scholar] [CrossRef]
- Furlan, M.; Cernigoj, A.; Boltezar, M. A coupled electromagnetic-mechanical-acoustic model of a DC electric motor. COMPEL-Int. J. Comput. Math. Electr. Electron. Eng. 2003, 22, 1155–1165. [Google Scholar] [CrossRef]
- Torregrossa, D.; Peyraut, F.; Fahimi, B.; M’Boua, J.; Miraoui, A. Multiphysics finite-element modeling for vibration and acoustic analysis of permanent magnet synchronous machine. IEEE Trans. Energy Convers. 2010, 26, 490–500. [Google Scholar] [CrossRef]
- Park, S.; Kim, W.; Kim, S.I. A numerical prediction model for vibration and noise of axial flux motors. IEEE Trans. Ind. Electron. 2014, 61, 5757–5762. [Google Scholar] [CrossRef]
- Zuo, S.; Lin, F.; Wu, X. Noise analysis, calculation, and reduction of external rotor permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2015, 62, 6204–6212. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Q.; Wei, X. An integrated approach of a field-circuit coupling model and multi-physics finite-element simulation for analysing transient electromagnetic vibration of pump motors. IET Electr. Power Appl. 2022, 16, 1030–1056. [Google Scholar] [CrossRef]
- Cho, S.; Hwang, J.; Kim, C.W. A study on vibration characteristics of brushless DC motor by electromagnetic-structural coupled analysis using entire finite element model. IEEE Trans. Energy Convers. 2018, 33, 1712–1718. [Google Scholar] [CrossRef]
- Lin, F.; Zuo, S.; Deng, W.; Wu, S. Noise prediction and sound quality analysis of variable-speed permanent magnet synchronous motor. IEEE Trans. Energy Convers. 2017, 32, 698–706. [Google Scholar] [CrossRef]
- Fang, H.; Li, D.; Guo, J.; Xu, Y.; Qu, R. Hybrid model for electromagnetic vibration synthesis of electrical machines considering tooth modulation and tangential effects. IEEE Trans. Ind. Electron. 2020, 68, 7284–7293. [Google Scholar] [CrossRef]
- Fang, Y.; Zhang, T. Vibroacoustic characterization of a permanent magnet synchronous motor powertrain for electric vehicles. IEEE Trans. Energy Convers. 2017, 33, 272–280. [Google Scholar] [CrossRef]
- Gieras, J.F.; Wang, C.; Lai, J.C. Noise of Polyphase Electric Motors; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Quantity |
|---|---|
| Type | BLDC |
| Rated power | 1.5 kW |
| Rated speed | 2000 rpm |
| Rated torque | 7.17 N⋅m |
| Number of phases | 3 |
| Number of poles | 4 |
| Number of lots | 24 |
| Specifications | Accelerometer | Impact Hammer | |
|---|---|---|---|
| 1-Axis | 3-Axis | ||
| Bandwidth (Hz) | 5000 | 5000 | 3500 |
| Maximum measurement deviation (%) | 2.2 | 3.6 | - |
| Mode | FE Analysis Results (Hz) | Test Results (Hz) | Relative Error (%) |
|---|---|---|---|
| 1 | 1010 | 1004 | 0.6 |
| 2 | 1801 | 1810 | −0.5 |
| 3 | 2121 | 2122 | 0 |
| 4 | 3191 | 3284 | −2.9 |
| Item | Quantity |
|---|---|
| Frequency resolution | 5 Hz |
| The number of spectral lines | 1024 |
| Bandwidth | 5120 Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, S.; Jeon, K.; Lee, K.-D.; Kim, C.-W. Electromagnetic Force Induced Structural Vibration Analysis and Experiment of Brushless Direct Current Motors for Operating Speed Range. Appl. Sci. 2022, 12, 8497. https://doi.org/10.3390/app12178497
Cho S, Jeon K, Lee K-D, Kim C-W. Electromagnetic Force Induced Structural Vibration Analysis and Experiment of Brushless Direct Current Motors for Operating Speed Range. Applied Sciences. 2022; 12(17):8497. https://doi.org/10.3390/app12178497
Chicago/Turabian StyleCho, Seunghyeon, Kyunghun Jeon, Ki-Deok Lee, and Chang-Wan Kim. 2022. "Electromagnetic Force Induced Structural Vibration Analysis and Experiment of Brushless Direct Current Motors for Operating Speed Range" Applied Sciences 12, no. 17: 8497. https://doi.org/10.3390/app12178497
APA StyleCho, S., Jeon, K., Lee, K.-D., & Kim, C.-W. (2022). Electromagnetic Force Induced Structural Vibration Analysis and Experiment of Brushless Direct Current Motors for Operating Speed Range. Applied Sciences, 12(17), 8497. https://doi.org/10.3390/app12178497