
Simulating Slosh Induced Damping, with Application to Aircraft Wing-like Structures

 , , and
, , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
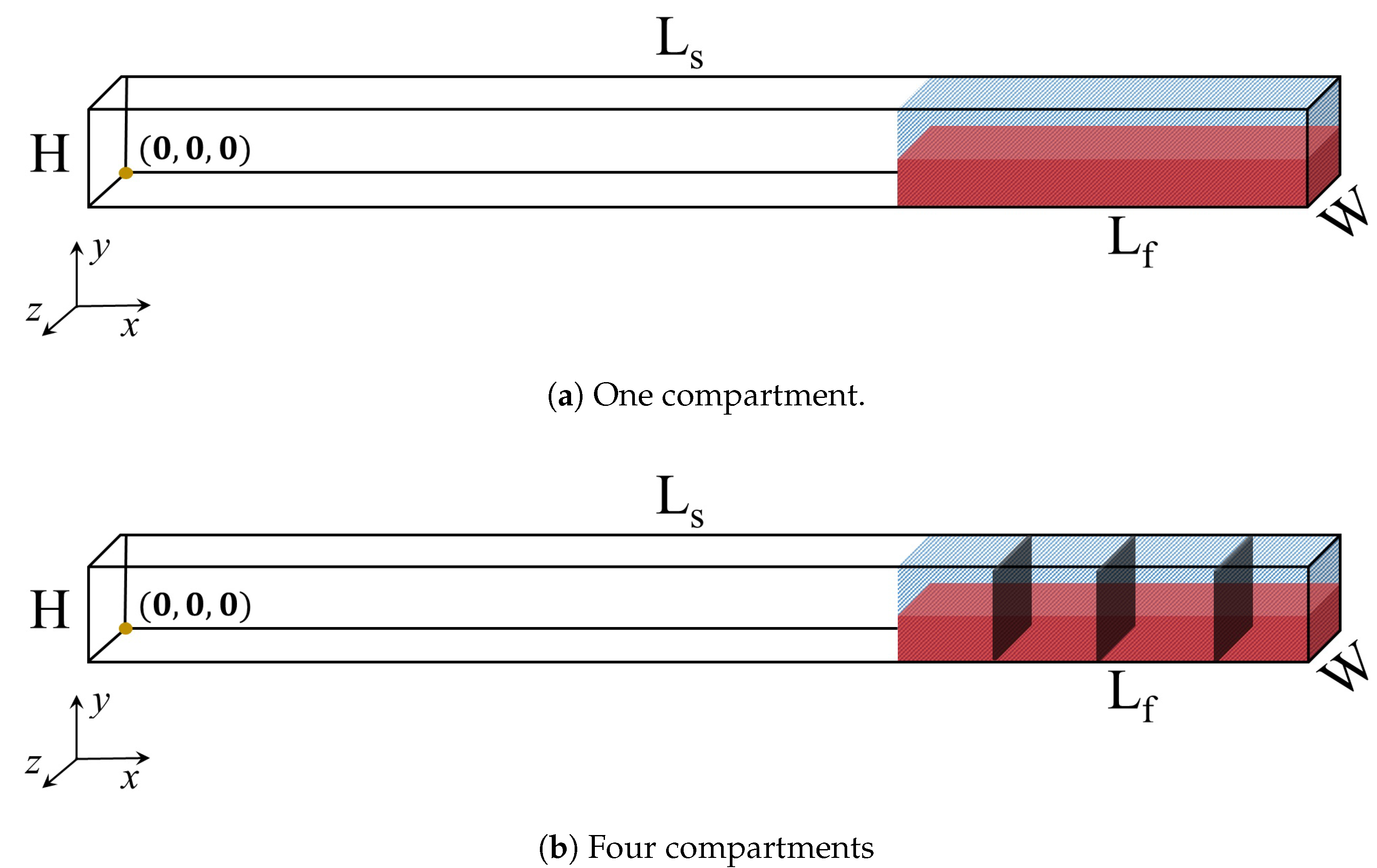
2. Problem Description
3. Numerical Methodology
3.1. The Simulation Framework for Fluid-Structure Interaction
3.1.1. Multiphase Fluid Solver
3.1.2. Elastic Structural Solver
3.1.3. Fluid–Structure Interaction
3.2. Numerical Setup
4. Results and Discussion
4.1. The Slosh-Induced Damping Ratio of an Oscillated Aircraft-Wing-like Structure
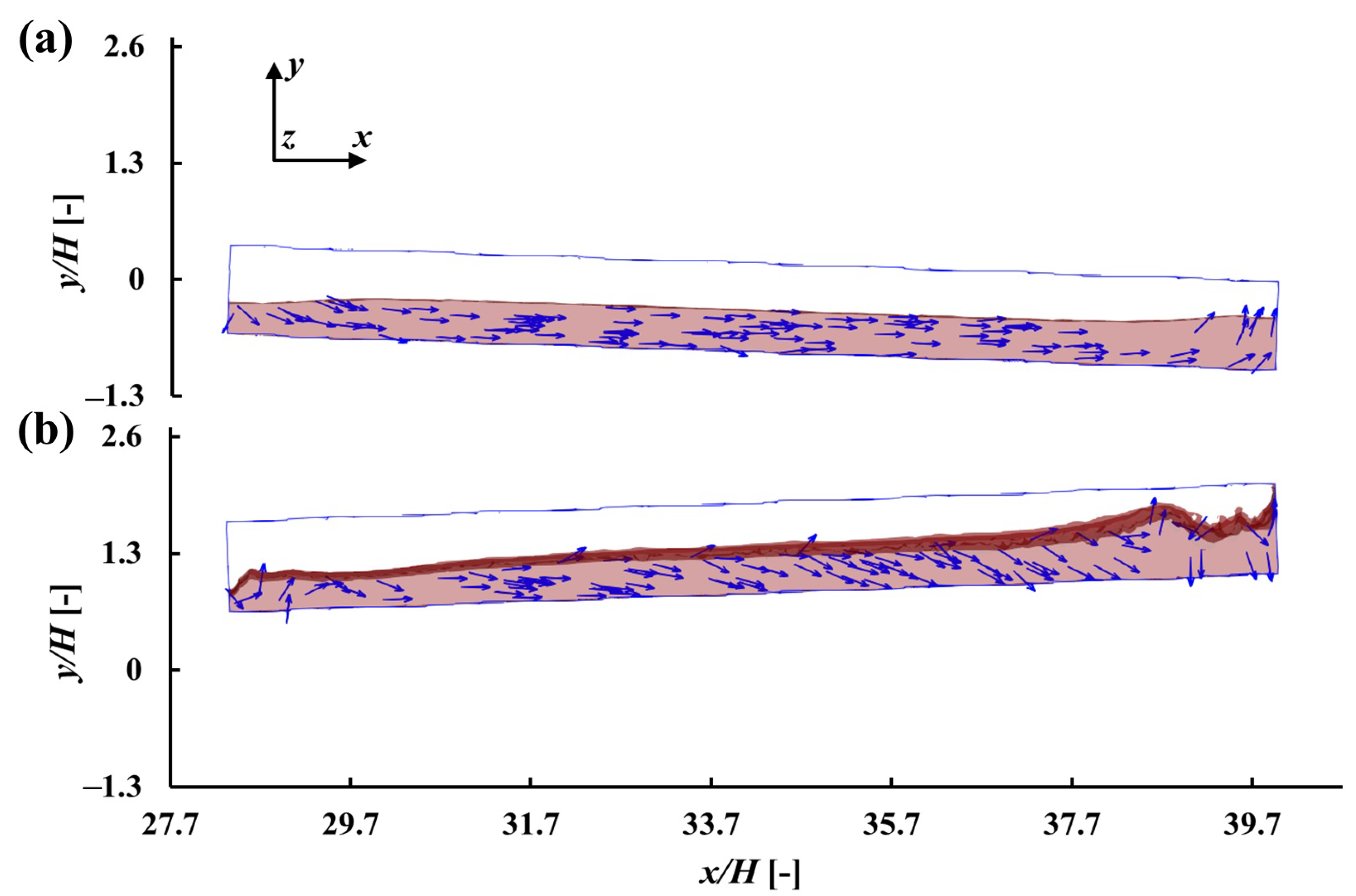
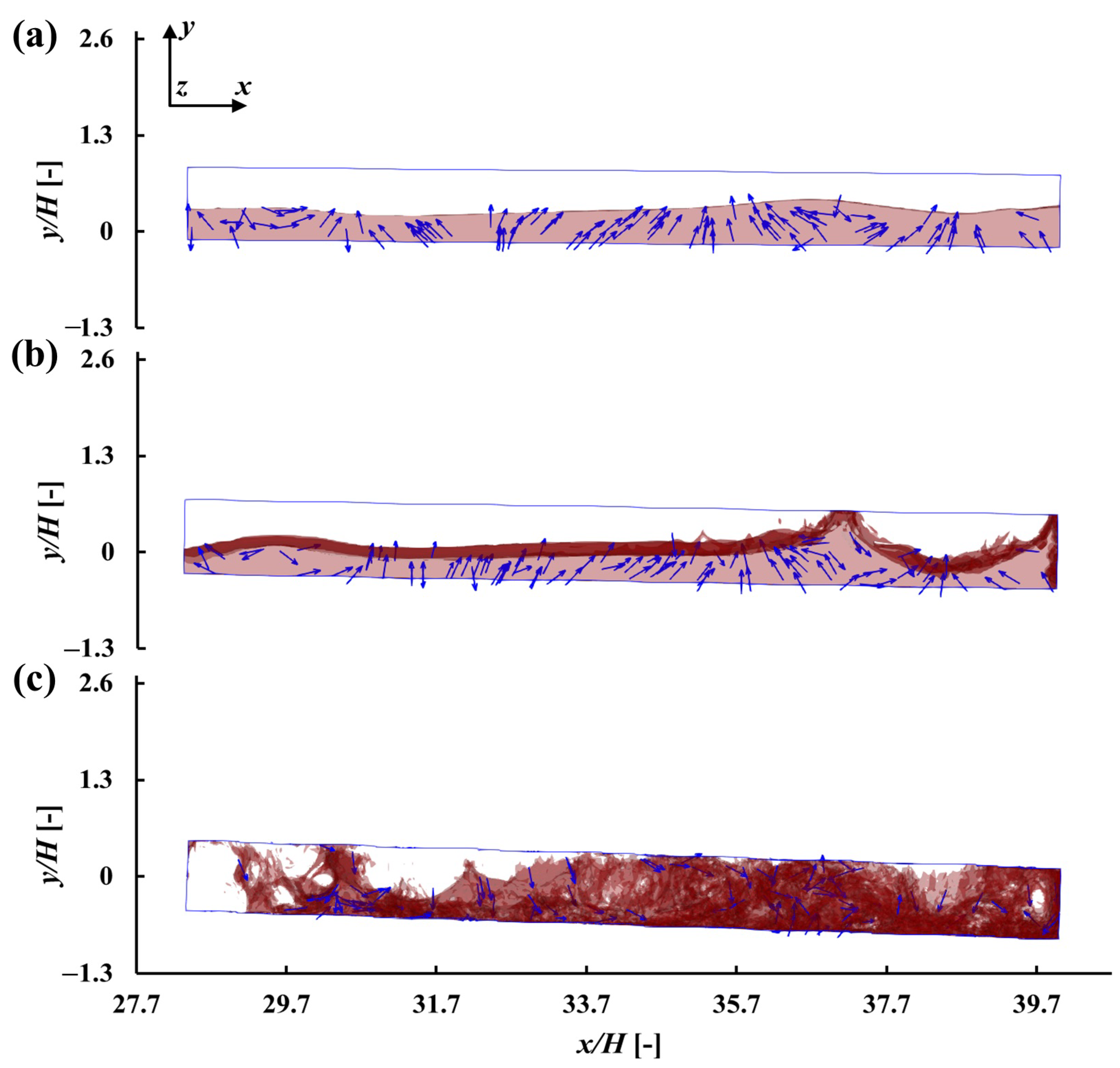
4.2. Impact of Initial Excitation Displacement with One Compartment
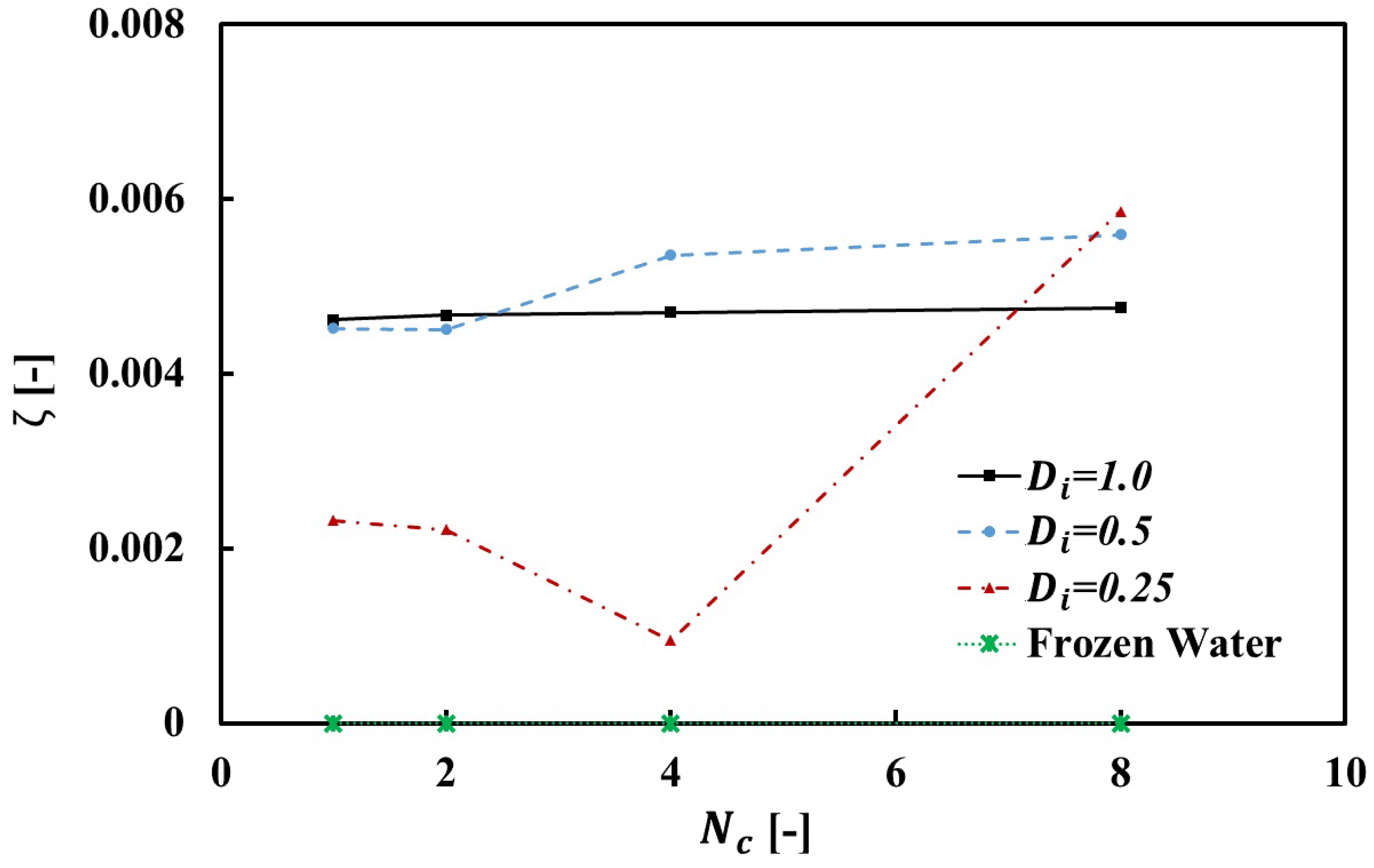
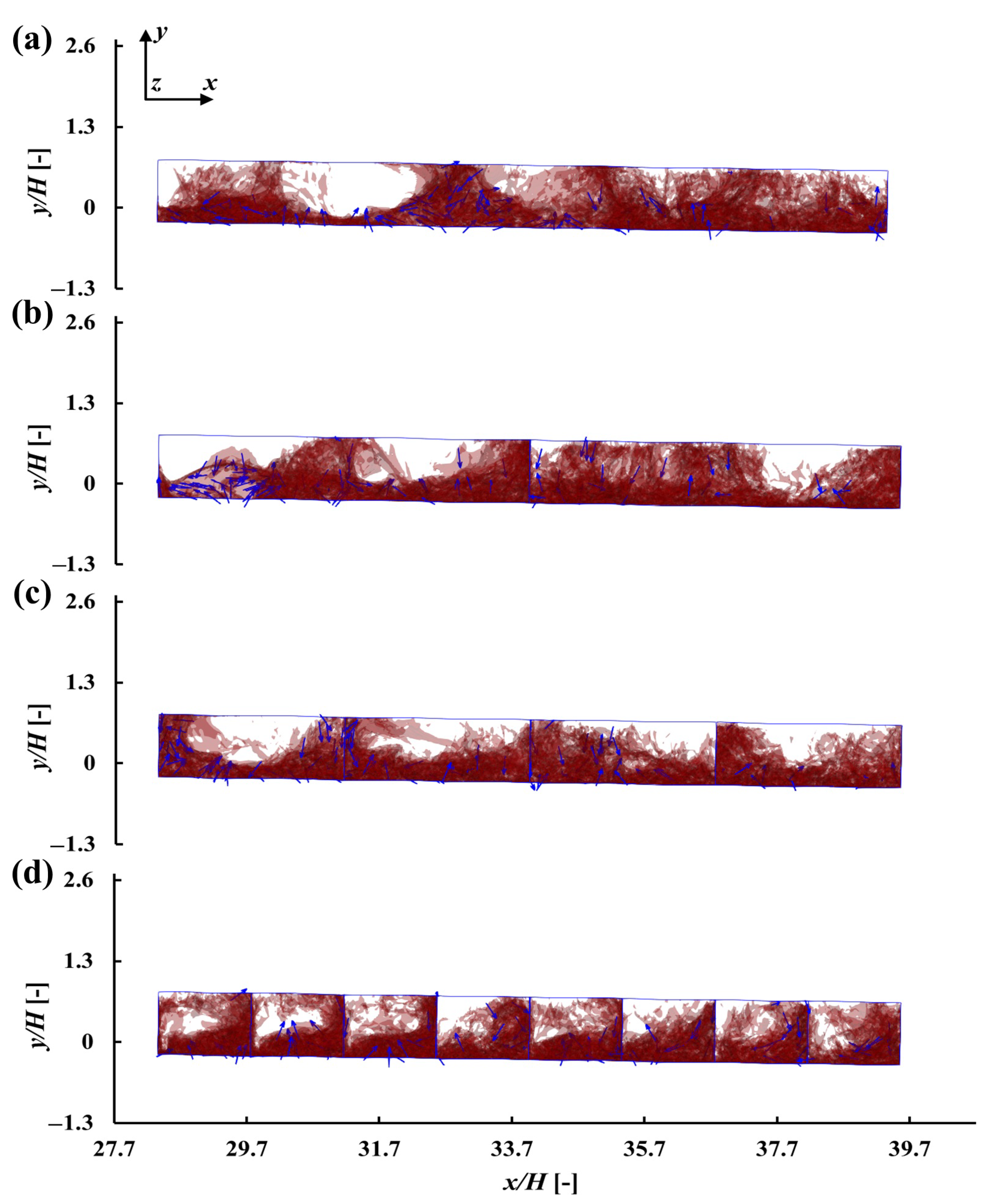
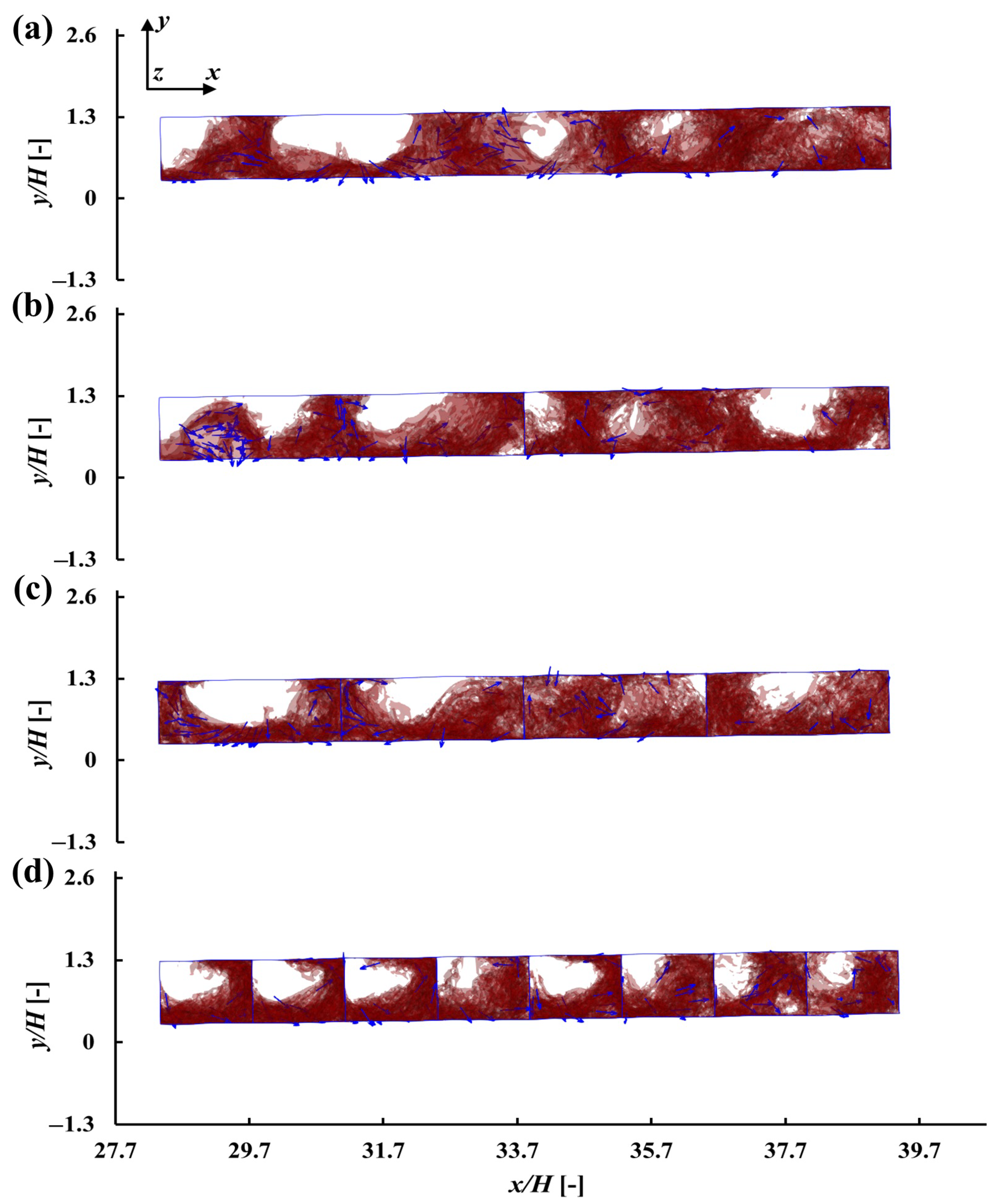
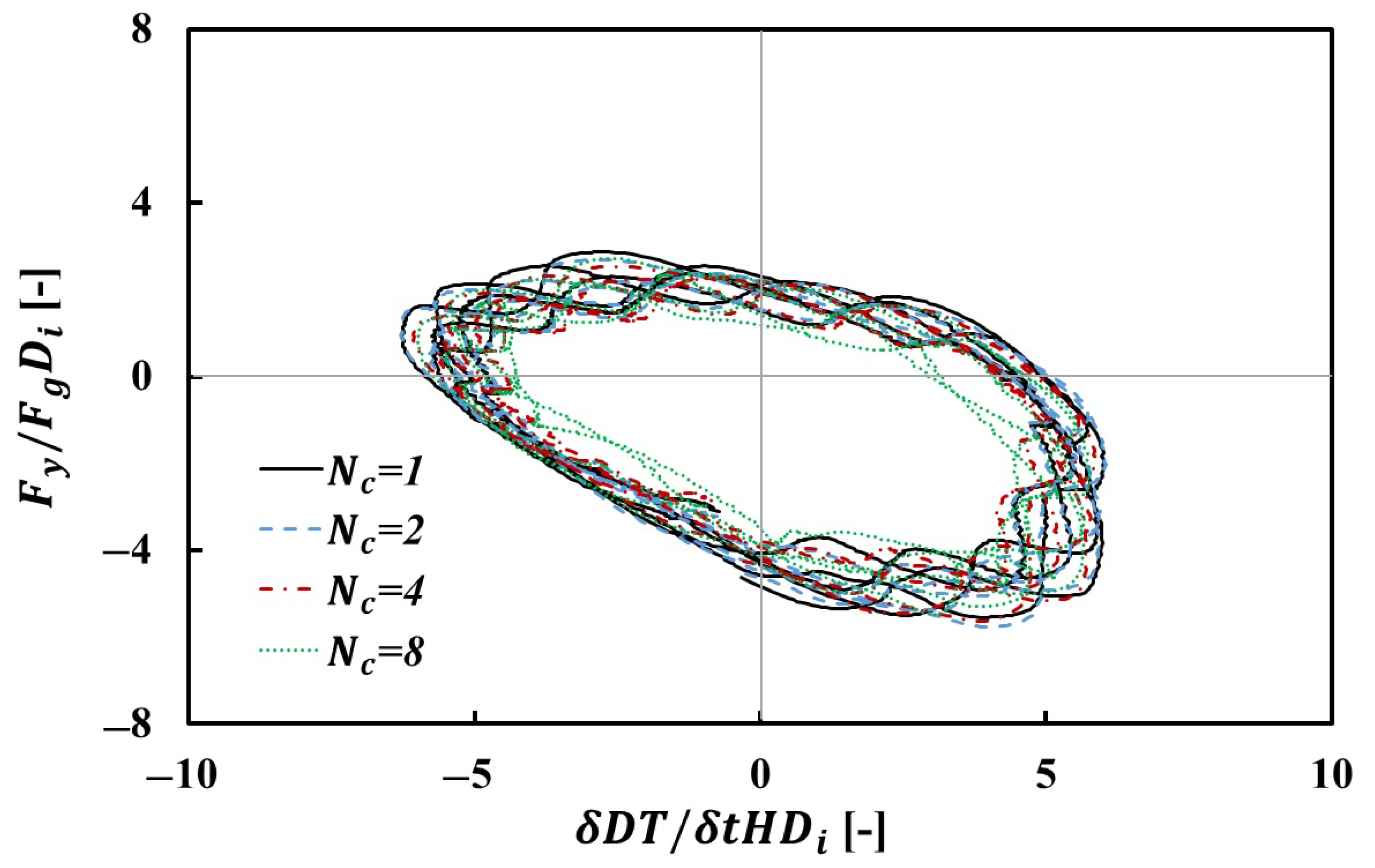
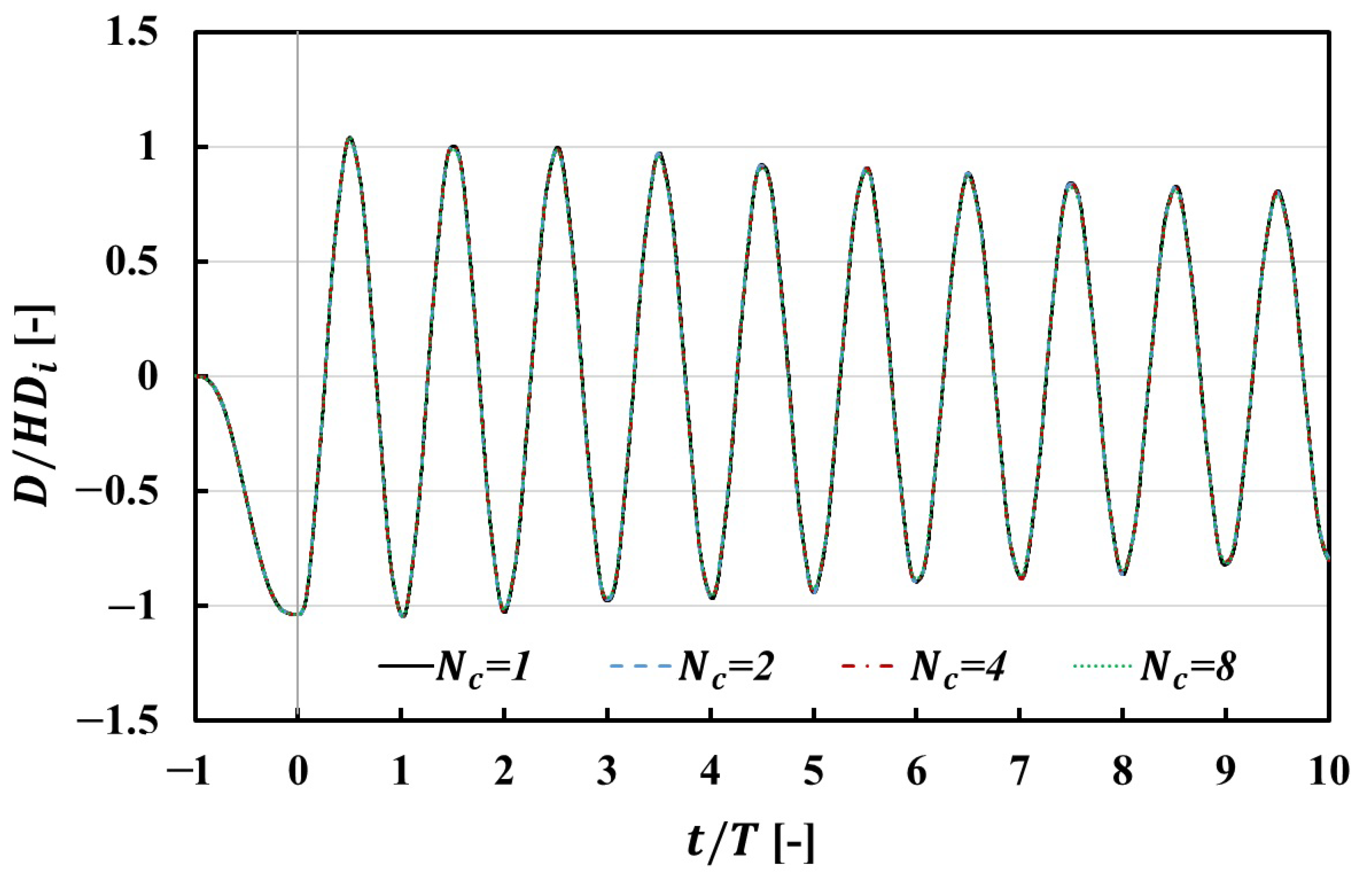
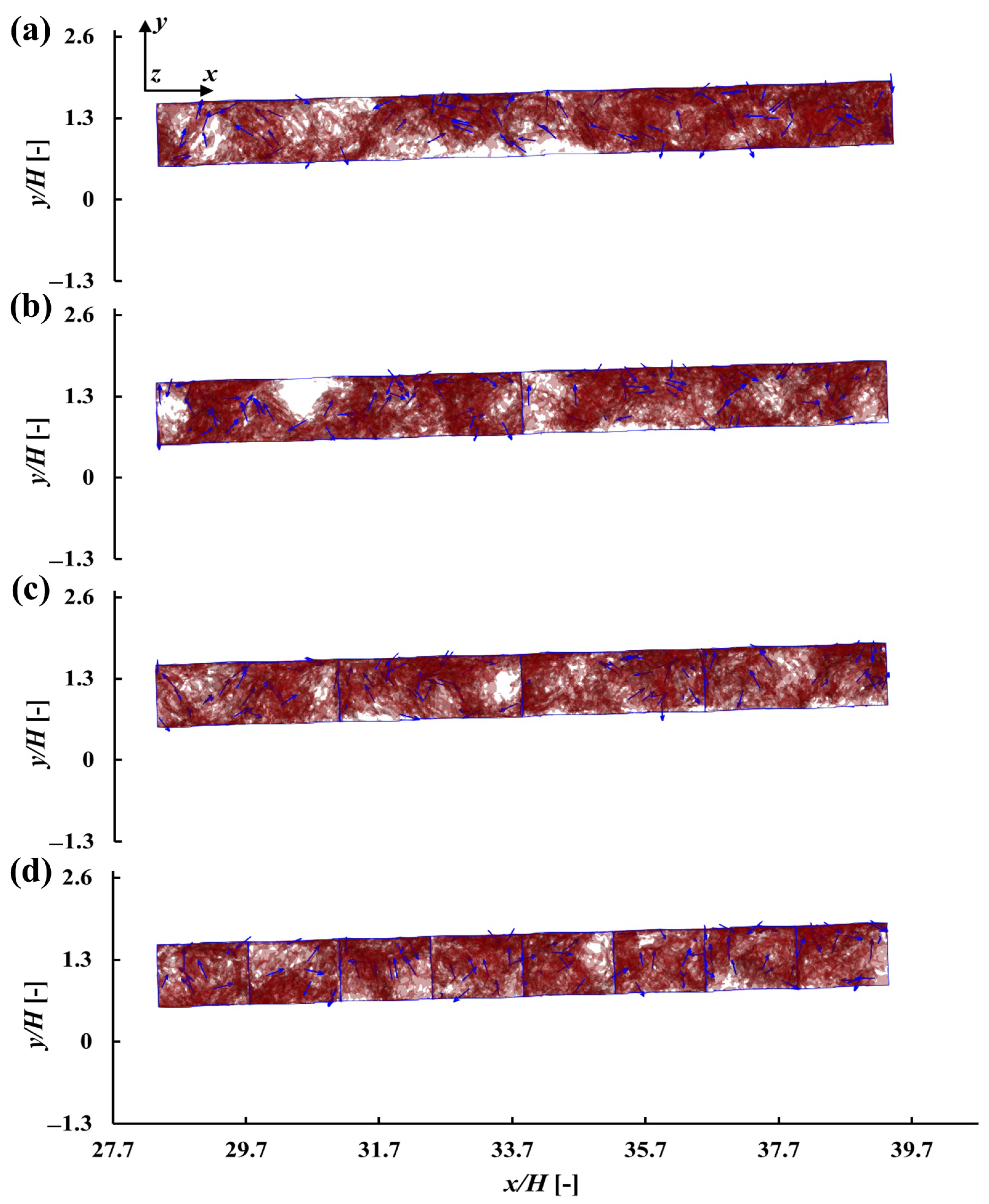
4.3. Impact of Compartment Numbers
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Deformation in respect to the body-fitted coordinates of the solid structure (m) | |
| Grid velocity (m/s) | |
| Fluid velocity (m/s) | |
| Decay rate of the damped sinusoidal function (-) | |
| Dynamic viscosity of the fluid (kg/(ms)) | |
| Phase angle of the damped sinusoidal function at (-) | |
| Fluid density (kg/m) | |
| Damping ratio of the tip displacement (-) | |
| D | Instantaneous tip displacement of the system along the y-axis direction (m) |
| Non-dimensional initial excitation amplitude (-) | |
| Initial excitation amplitude (m) | |
| e | The Euler’s number (-) |
| Gravitational force of fluid (N) | |
| Instantaneous vertical fluid force (N) | |
| The first sloshing frequency (Hz) | |
| g | Gravitational acceleration (m/s) |
| H | Height of the beam (m) |
| Length of the tank (m) | |
| Length of the beam (m) | |
| Number of compartments (-) | |
| p | Fluid pressure (N/m) |
| t | Time (s) |
| T | Natural period of the beam (s) |
| W | Width of the beam (m) |
References
- Ibrahim, R.A. Liquid Sloshing Dynamics: Theory and Applications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Zheng, X.; You, Y.; Ma, Q.; Khayyer, A.; Shao, S. A comparative study on violent sloshing with complex baffles using the ISPH method. Appl. Sci. 2018, 8, 904. [Google Scholar] [CrossRef]
- Jin, Q.; Xin, J.; Shi, F.; Shi, F. Parametric studies on sloshing in a three-dimensional prismatic tank with different water depths, excitation frequencies, and baffle heights by a Cartesian grid method. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 691–706. [Google Scholar] [CrossRef]
- Cavalagli, N.; Biscarini, C.; Facci, A.L.; Ubertini, F.; Ubertini, S. Experimental and numerical analysis of energy dissipation in a sloshing absorber. J. Fluids Struct. 2017, 68, 466–481. [Google Scholar] [CrossRef]
- Constantin, L.; De Courcy, J.; Titurus, B.; Rendall, T.C.; Cooper, J.E. Analysis of damping from vertical sloshing in a SDOF system. Mech. Syst. Signal Process. 2021, 152, 107452. [Google Scholar] [CrossRef]
- Keulegan, G.H. Energy dissipation in standing waves in rectangular basins. J. Fluid Mech. 1959, 6, 33–50. [Google Scholar] [CrossRef]
- Jiang, L.; Ting, C.L.; Perlin, M.; Schultz, W.W. Moderate and steep Faraday waves: Instabilities, modulation and temporal asymmetries. J. Fluid Mech. 1996, 329, 275–307. [Google Scholar] [CrossRef]
- Jiang, L.; Perlin, M.; Schultz, W.W. Period tripling and energy dissipation of breaking standing waves. J. Fluid Mech. 1998, 369, 273–299. [Google Scholar] [CrossRef]
- Tamura, Y.; Fujii, K.; Ohtsuki, T.; Wakahara, T.; Kohsaka, R. Effectiveness of tuned liquid dampers under wind excitation. Eng. Struct. 1995, 17, 609–621. [Google Scholar] [CrossRef]
- Ikeda, T.; Nakagawa, N. Non-linear vibrations of a structure caused by water sloshing in a rectangular tank. J. Sound Vib. 1997, 201, 23–41. [Google Scholar] [CrossRef]
- Bouscasse, B.; Colagrossi, A.; Souto-Iglesias, A.; Cercos-Pita, J. Mechanical energy dissipation induced by sloshing and wave breaking in a fully coupled angular motion system. I. Theoretical formulation and numerical investigation. Phys. Fluids 2014, 26, 033103. [Google Scholar] [CrossRef] [Green Version]
- Bouscasse, B.; Colagrossi, A.; Souto-Iglesias, A.; Cercos-Pita, J. Mechanical energy dissipation induced by sloshing and wave breaking in a fully coupled angular motion system. II. Experimental investigation. Phys. Fluids 2014, 26, 033104. [Google Scholar] [CrossRef]
- Merten, K.F.; Stephenson, B.H. Some Dynamic Effects of Fuel Motion in Simplified Model Tip Tanks on Suddenly Excited Bending Oscillations; Technical Report; 1952; Available online: https://digital.library.unt.edu/ark:/67531/metadc56319 (accessed on 3 June 2022).
- Reese, J.R. Some Effects of Fluid in Pylon-Mounted Tanks on Flutter; Technical Report; 1955; Available online: https://digital.library.unt.edu/ark:/67531/metadc61466 (accessed on 3 June 2022).
- Sewall, J.L. An Experimental and Theoretical Study of the Effect of Fuel on Pitching-Translation Flutter; Technical Report; 1957. Available online: https://ntrs.nasa.gov/citations/19930085017 (accessed on 3 June 2022).
- Gambioli, F.; Chamos, A.; Jones, S.; Guthrie, P.; Webb, J.; Levenhagen, J.; Behruzi, P.; Mastroddi, F.; Malan, A.; Longshaw, S.; et al. Sloshing wing dynamics–project overview. In Proceedings of the 8th Transport Research Arena TRA 2020, Helsinki, Finland, 27–30 April 2020. [Google Scholar]
- Gambioli, F.; Chamos, A.; Levenhagen, J.; Behruzi, P.; Mastroddi, F.; Malan, A.; Longshaw, S.; Skillen, A.; Cooper, J.E.; Gonzalez, L.; et al. Sloshing Wing Dynamics-2nd Year Project Overview. In Proceedings of the AIAA SCITECH 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1341. [Google Scholar]
- Titurus, B.; Cooper, J.E.; Saltari, F.; Mastroddi, F.; Gambioli, F. Analysis of a sloshing beam experiment. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics, Savannah, GA, USA, 10–13 June 2019; Volume139. [Google Scholar]
- Gambioli, F.; Usach, R.A.; Kirby, J.; Wilson, T.; Behruzi, P. Experimental evaluation of fuel sloshing effects on wing dynamics. In Proceedings of the 18th International Forum on Aeroelasticity and Structural Dynamics, Savannah, GA, USA, 10–13 June 2019. [Google Scholar]
- Martinez-Carrascal, J.; González-Gutiérrez, L. Experimental study of the liquid damping effects on a SDOF vertical sloshing tank. J. Fluids Struct. 2021, 100, 103172. [Google Scholar] [CrossRef]
- Constantin, L.; De Courcy, J.; Titurus, B.; Rendall, T.C.; Cooper, J.E. Sloshing induced damping across Froude numbers in a harmonically vertically excited system. J. Sound Vib. 2021, 510, 116302. [Google Scholar] [CrossRef]
- Ilangakoon, N.A.; Malan, A.G.; Jones, B.W. A higher-order accurate surface tension modelling volume-of-fluid scheme for 2D curvilinear meshes. J. Comput. Phys. 2020, 420, 109717. [Google Scholar] [CrossRef]
- Oomar, M.Y.; Malan, A.G.; Horwitz, R.A.; Jones, B.W.; Langdon, G.S. An all-Mach number HLLC-based scheme for multi-phase flow with surface tension. Appl. Sci. 2021, 11, 3413. [Google Scholar] [CrossRef]
- Wright, M.D.; Gambioli, F.; Malan, A.G. CFD based non-dimensional characterization of energy dissipation due to verticle slosh. Appl. Sci. 2021, 11, 10401. [Google Scholar] [CrossRef]
- Malan, A.G.; Jones, B.W.; Malan, L.C.; Wright, M. Accurate prediction of violent slosh loads via a weakly compressible vof formulation. In Proceedings of the 31st International Ocean and Polar Engineering Conference, Rhodes, Greece, 20–25 June 2021; OnePetro: Richardson, TX, USA, 2021. [Google Scholar]
- Jones, B.W.A.; Wright, M.D.; Malan, A.G.; Farao, J.; Gambioli, F.; Lonshaw, S. A High Fidelity Fluid-Structure-Interaction Model of the Airbus Protospace Slosh Damping Experiment. In Proceedings of the International Forum on Aeroelasticity and Structural Dynamics, online, 13–17 June 2022. [Google Scholar]
- Calderon-Sanchez, J.; Martinez-Carrascal, J.; Gonzalez-Gutierrez, L.; Colagrossi, A. A global analysis of a coupled violent vertical sloshing problem using an SPH methodology. Eng. Appl. Comput. Fluid Mech. 2021, 15, 865–888. [Google Scholar] [CrossRef]
- De Courcy, J.J.; Constantin, L.; Titurus, B.; Rendall, T.; Cooper, J.E. Gust Loads Alleviation Using Sloshing Fuel. In Proceedings of the AIAA Scitech 2021 Forum, Online, 11–15, 19–21 January 2021; p. 1152. [Google Scholar]
- Pizzoli, M.; Saltari, F.; Mastroddi, F.; Martinez-Carrascal, J.; González-Gutiérrez, L.M. Nonlinear reduced-order model for vertical sloshing by employing neural networks. Nonlinear Dyn. 2022, 107, 1469–1478. [Google Scholar] [CrossRef]
- Mastroddi, F.; Saltari, F.; Traini, A.; Barile, A.; Gambioli, F. Sloshing ROMs for Fluid-Structure Interactions in Aerospace Applications. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1451. [Google Scholar]
- Liu, W.; Longshaw, S.M.; Skillen, A.; Emerson, D.R.; Valente, C.; Gambioli, F. A High-Performance Open-Source Solution for Multiphase Fluid-Structure Interaction. Int. J. Offshore Polar Eng. 2022, 32, 24–30. [Google Scholar] [CrossRef]
- Liu, W. ParaSiF—Parallel Partitioned Multi-physics Simulation Framework. Available online: https://github.com/ParaSiF/ParaSiF (accessed on 3 June 2022).
- Liu, W.; Longshaw, S.M.; Skillen, A.; Emerson, D.R.; Valente, C.; Gambioli, F. A High-Performance Open-Source Solution for Multiphase Fluid-Structure Interaction. In Proceedings of the The Thirty-first International Ocean and Polar Engineering Conference (ISOPE-2021), Rhodes, Greece, 20–25 June 2021; OnePetro: Richardson, TX, USA, 2021. [Google Scholar]
- Weller, H.G.; Tabor, G.; Jasak, H.; Fureby, C. A tensorial approach to computational continuum mechanics using object-oriented techniques. Comput. Phys. 1998, 12, 620–631. [Google Scholar] [CrossRef]
- Alnæs, M.; Blechta, J.; Hake, J.; Johansson, A.; Kehlet, B.; Logg, A.; Richardson, C.; Ring, J.; Rognes, M.E.; Wells, G.N. The FEniCS project version 1.5. Arch. Numer. Softw. 2015. [Google Scholar] [CrossRef]
- Tang, Y.; Kudo, S.; Bian, X.; Li, Z.; Karniadakis, G. Multiscale Universal Interface: A Concurrent Framework for Coupling Heterogeneous Solvers. J. Comput. Phys. 2015, 297, 13–31. [Google Scholar] [CrossRef]
- Tuković, Ž.; Karač, A.; Cardiff, P.; Jasak, H.; Ivanković, A. OpenFOAM finite volume solver for fluid-solid interaction. Trans. FAMENA 2018, 42, 1–31. [Google Scholar] [CrossRef]
- Jasak, H. Dynamic mesh handling in OpenFOAM. In Proceedings of the 47th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 5–8 January 2009; p. 341. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions. Ph.D. Thesis, Imperial College London (University of London), London, UK, 2003. [Google Scholar]
- Erlicher, S.; Bonaventura, L.; Bursi, O.S. The analysis of the generalized-α method for non-linear dynamic problems. Comput. Mech. 2002, 28, 83–104. [Google Scholar] [CrossRef]
- Bleyer, J. Numerical Tours of Computational Mechanics with Fenics. Zenodo 2018. Available online: http://comet-fenics.readthedocs.io/en/latest/intro.html (accessed on 20 October 2021).
- Newmark, N.M. A method of computation for structural dynamics. J. Eng. Mech. Div. 1959, 85, 67–94. [Google Scholar] [CrossRef]
- Slyngstad, A.S. Verification and Validation of a Monolithic Fluid-Structure Interaction Solver in FEniCS. A Comparison of Mesh Lifting Operators. Master’s Thesis, University of Oslo, Oslo, Norway, 2017. [Google Scholar]
- Rendall, T.C.; Allen, C.B. Unified fluid–structure interpolation and mesh motion using radial basis functions. Int. J. Numer. Methods Eng. 2008, 74, 1519–1559. [Google Scholar] [CrossRef]
- Bungartz, H.J.; Lindner, F.; Gatzhammer, B.; Mehl, M.; Scheufele, K.; Shukaev, A.; Uekermann, B. preCICE—A fully parallel library for multi-physics surface coupling. Comput. Fluids 2016, 141, 250–258. [Google Scholar] [CrossRef]
- Liu, W.; Wang, W.; Skillen, A.; Longshaw, S.; Moulinec, C.; Emerson, D. A parallel partitioned approach on fluid-structure interaction simulation using the multiscale universal interface coupling library. In Proceedings of the 14th WCCMECCOMAS Congress, Virtual Congress, 11–15 January 2021; Volume 1400. [Google Scholar]
- Liu, W.; Wang, W.; Skillen, A.; Fernandez, E.R.; Longshaw, S.; Sawko, R. Code Development on Parallel Partitioned Fluid-Structure Interaction Simulations. 2020. Available online: https://epubs.stfc.ac.uk/work/46400815 (accessed on 3 June 2022).
- Schneider, T.; Hu, Y.; Gao, X.; Dumas, J.; Zorin, D.; Panozzo, D. A large scale comparison of tetrahedral and hexahedral elements for finite element analysis. arXiv 2019, arXiv:1903.09332. [Google Scholar]
- Tahmasebi, M.K.; Shamsoddini, R.; Abolpour, B. Performances of different turbulence models for simulating shallow water sloshing in rectangular tank. J. Mar. Sci. Appl. 2020, 19, 381–387. [Google Scholar] [CrossRef]
- Huang, W.; He, T.; Yu, J.; Wang, Q.; Wang, X. Direct CFD Simulation and Experimental Study on Coupled Motion Characteristics of Ship and Tank Sloshing in Waves. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 5–10 June 2022; Volume 85185, p. V008T08A035. [Google Scholar]
- Housner, G.W. Dynamic Analysis of Fluids in Containers Subjected to Acceleration. In Nuclear Reactors and Earthquakes; Report No. TID; 1963; Volume 7024, Available online: https://digital.library.unt.edu/ark:/67531/metadc1030393/m2/1/high_res_d/4620608.pdf (accessed on 3 June 2022).








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Mahfoze, O.A.; Longshaw, S.M.; Skillen, A.; Emerson, D.R. Simulating Slosh Induced Damping, with Application to Aircraft Wing-like Structures. Appl. Sci. 2022, 12, 8481. https://doi.org/10.3390/app12178481
Liu W, Mahfoze OA, Longshaw SM, Skillen A, Emerson DR. Simulating Slosh Induced Damping, with Application to Aircraft Wing-like Structures. Applied Sciences. 2022; 12(17):8481. https://doi.org/10.3390/app12178481
Chicago/Turabian StyleLiu, Wendi, Omar Ahmed Mahfoze, Stephen M. Longshaw, Alex Skillen, and David R. Emerson. 2022. "Simulating Slosh Induced Damping, with Application to Aircraft Wing-like Structures" Applied Sciences 12, no. 17: 8481. https://doi.org/10.3390/app12178481
APA StyleLiu, W., Mahfoze, O. A., Longshaw, S. M., Skillen, A., & Emerson, D. R. (2022). Simulating Slosh Induced Damping, with Application to Aircraft Wing-like Structures. Applied Sciences, 12(17), 8481. https://doi.org/10.3390/app12178481