
Solving the Integrated Multi-Port Stowage Planning and Container Relocation Problems with a Genetic Algorithm and Simulation


Abstract
:1. Introduction
- 1.
- We show the importance of developing an integrated plan for the MPSP and CRP problems to provide a better solution than the one obtained by performing isolated or simplified plans, as reported in the literature.
- 2.
- We extend the methodology employed for the MPSP in a manner that enables a fast solution to the MPSP and CRP, thus avoiding the high computational burden required by the exact approaches to solving such large-scale problems.
- 3.
- Our approach guarantees that the multi-port stowage plan obtained is executable by the port terminal and the sequence of retrieved containers from the yard is also good for the ship, thereby making the solution advantageous for all port terminals and the shipping company by reducing the total number of container movements.
Related Works
2. Modeling the Problem
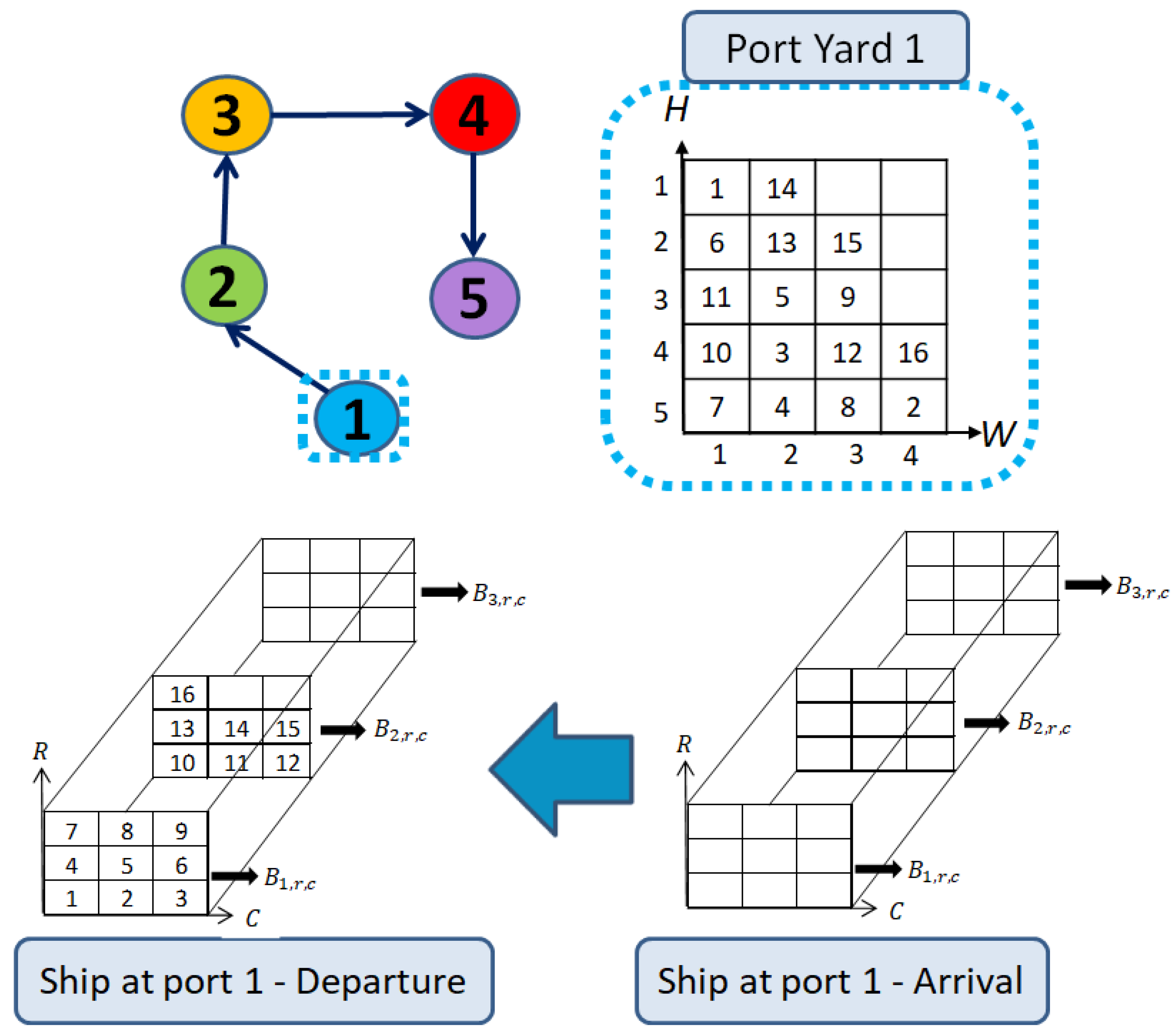
- The container ship has a rectangular format and can be represented as a matrix, called the ship’s occupation matrix (), with rows (), columns (), and bays () and a maximum capacity of containers. Each space to store a container is a coordinate (), where , , and . An irregular format may be achieved by simply adding constraints that represent imaginary containers that occupy the same spaces during the whole voyage [26].
- The yard can also be represented as a matrix called , with rows () and stacks (). Each space to store a container is a coordinate (), where and .
- All containers have the same size and weight and are accessible only from the top.
- All containers in the port yard will be loaded onto the ship.
- The container ship can always carry all the containers at each port p, and its capacity will never be exceeded.
- In each yard, there must be at least empty positions to guarantee the accessibility of any container. Analogously, onboard the ship, there must be at least empty positions to guarantee the accessibility of any container.
- Each position in the yard and on the ship must be occupied by at most one container.
- No “holes” are allowed in the stacking area, meaning that if there is a container in position , then the lower position must also be occupied. Likewise, if there is a container is in position on the ship, then the lower position must also be occupied.
- The last in, first out (LIFO) policy must be respected, meaning that if container n is below container q, then container n must be moved before container q.
- No container can be relocated to a position in the same column.
- In the yard, a container in position can only be moved if the position above it is empty. Likewise, on the ship, a container in position can only be moved if the position above it is empty.
- The containers are removed from the yard one at a time and then loaded onto the ship.
- Container n, after being loaded onto the ship, does not change its position while the ship is still stopped at the same port.
- When a container is unloaded and loaded back onto the ship, these operations are counted as one relocation movement.
- The containers relocated outside the ship are always loaded back onto it before the export containers at the port yard.
3. Methodology
3.1. Rules Representation for the CRP
- Rule : To locate an available position, this rule searches the yard’s occupancy matrix in a fixed direction, starting from the last row H to the first row , row by row, and from left to right; that is, the stacks are arranged such that , as illustrated in Figure 4a.
- Rule : To locate an available position, this rule searches the yard’s occupancy matrix in a fixed direction, starting from the last row to the first row, stack by stack, and from left to right, as illustrated in Figure 4b.
- Rule : This rule reverses the direction used in rule . To locate an available position, it searches the yard’s occupancy matrix in a fixed direction, starting from the last row to the first row, row by row, and from right to left; that is, the stacks are arranged such that , as illustrated in Figure 4c.
- Rule : This rule reverses the direction used in rule . To locate an available position, it searches the yard’s occupancy matrix in a fixed direction, starting from the last row to the first row, stack by stack, and from right to left as illustrated in Figure 4d.
- Rule : To locate an available position, this rule searches the yard’s occupancy matrix in a fixed direction, starting from the last row to the first row, row by row, and alternating the direction in each row; that is, the last row H goes from left to right, row goes from right to left, and so on until row , as illustrated in Figure 4e.
- Rule : This rule is the reverse of rule . To locate an available position, it searches the yard’s occupancy matrix in a fixed direction, starting from the last row to the first row, row by row, and alternating the direction in each row; that is, the last row H goes from right to left, row goes from left to right, and so on until row , as illustrated in Figure 4f.
- Rule : To relocate the blocking containers, this rule performs a computation of a stack score based on the removal priority of the containers at the yard. The goal is to relocate the blocking container to a new position where there are no containers that are going to be retrieved before it. If there is no such position available, then the stack chosen is the one that has the latest future relocation. For more details, see [34].
- Rule : This rule is similar to rule , but it allows one “cleaning move” under certain conditions when identifying eligible positions to relocate a blocking container. This means that a container that is not in the same stack as the target container can be moved to make room for a blocking container to avoid future relocation. In Figure 5, note that when the highlighted container 1 will be retrieved, if container 2 had not been first relocated to position , at least two more relocations would have had to be executed to retrieve all containers from the yard. For more details, see [41].
- Rule : This rule chooses the lowest stack that has an available position to relocate the blocking container. In the case of multiple stacks with the same lowest height, the nearest one is chosen. For more details, see [33].
- Rule : This rule chooses the nearest stack that has an available position to relocate the blocking containers. For more details, see [33].
3.2. Representation by Rules for the MPSP
- Rule : To locate an available position for the container that is being loaded, this rule searches the ship’s occupancy matrix in a fixed direction, starting from the last row R to the first row , row by row, and from left to right; that is, the stacks are arranged such that for each bay at a time, starting from bay to bay , as illustrated in Figure 6a.
- Rule : To locate an available position, this rule searches the ship’s occupancy matrix in a fixed direction, starting from the last row R to the first row , stack by stack, from left to right, and from bay to bay , as illustrated in Figure 6b.
- Rule : This rule reverses the direction used in . It searches the ship’s occupancy matrix starting from the last row R to the first row , row by row, and from right to left; that is, the stacks are arranged such that from bay to bay , as illustrated in Figure 6c.
- Rule : This rule reverses the direction used in . It searches the ship’s occupancy matrix starting from the last row R to the first row , stack by stack, and from right to left; that is, the stacks are arranged such that from bay to bay , as illustrated in Figure 6d.
- Rule : To locate an available position for the container that is being loaded, this rule searches the ship’s occupancy matrix in a fixed direction, starting from the first row to row R and filling up the ship by row but interleaving the bays (i.e., from bay to ), as illustrated in Figure 7a.
- Rule : To locate an available position for the container that is being loaded, this rule searches the ship’s occupancy matrix in a fixed direction, starting from the first row and interleaving the bays (i.e., from bay to , filling up by stack, and starting from stack to stack ), as illustrated in Figure 7b.
- Rule : This rule reverses the direction used in . It searches the ship’s occupancy matrix starting from the last row R to row , filling up the ship by row but interleaving the bays (i.e., from bay to ), as illustrated in Figure 7c.
- Rule : This rule reverses the direction used in . It searches the ship’s occupancy matrix starting from the last row R to the first row , filling up the ship by stack but interleaving the bays (i.e., from bay to ), as illustrated in Figure 7d.
- Rule : This rule fills the ship by bay from bay to bay , and at each bay, it uses a stack score based on the removal priority of the containers in the yard to choose a position to allocate the incoming container, similar to what was performed to choose a position for a blocking container in rule . It seeks to put in the same stack containers that are going to be unloaded at the same or previous port, putting at the bottom the containers with the furthest destination port. If a container is being loaded, and all stacks already have containers that are going to be unloaded before it, the rule chooses the stacks that lead to the most distant relocation. For example, if there are three stacks available, and the first container to be unloaded at each stack is for port 3, port 4, and port 5, then the rule will choose the port 5 stack.
- Rule : This rule is the same as rule , with the difference that when there is no stack to allocate a container where it will not cause any further relocation, it chooses the stack with the nearest relocation. For example, if there are three stacks available, and the first container to be unloaded at each stack is for port 3, port 4, and port 5, then the rule will choose the port 3 stack.
- Rule : This rule fills the ship by bay from bay to bay , choosing the smallest stack to relocate a container. If there are multiple columns with the same height, then it chooses the leftmost stack (i.e., from stack to ).
- Rule : At any port p, this rule will only remove the containers whose destination is port p and all the ones that are blocking the stacks.
- Rule : This rule states that all containers on the ship must be unloaded when arriving at a specific port p to allow for a complete rearrangement of every stack.
- Rule : This rule was adapted from [43] and allows a blocking container to be internally relocated by repositioning it from one position in the ship bay b to another position in the same ship bay b if there is space to relocate it in this bay b and when it does not cause a future relocation; that is, in this stack, there are no containers that are going to be unloaded before the relocated container. Otherwise, it is unloaded from the ship.
3.3. Integrating the Rules for the MPSP and CRP
3.4. A Genetic Algorithm
3.4.1. Initialization
3.4.2. Evaluation: The Simulation Process
| Algorithm 1 Simulation scheme |
|
- : a counter variable which indicates the current port simulation;
- : a cell array of a size , where each cell contains the yard’s matrix for port p;
- : the ship’s matrix, indicating the positions of all containers in the ship at each port p.
- S: the ship’s matrix, indicating the positions of all containers in the ship at each port p;
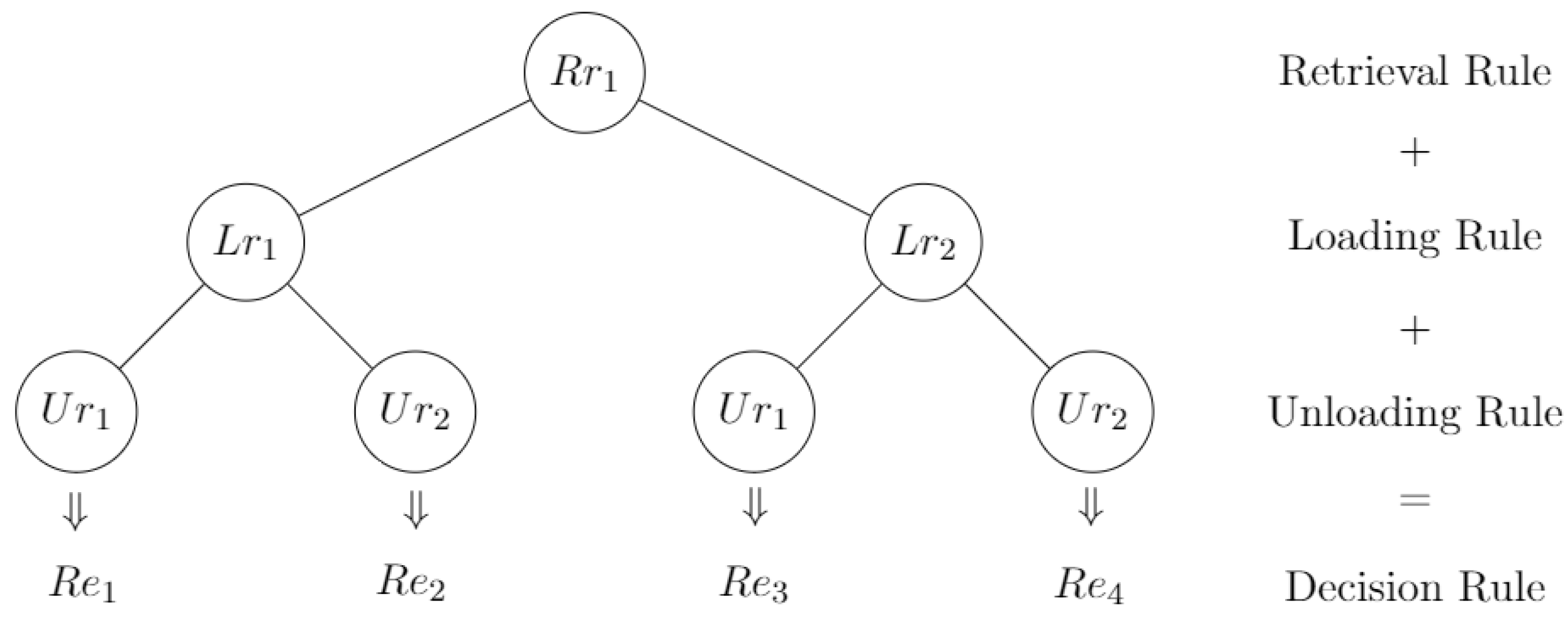
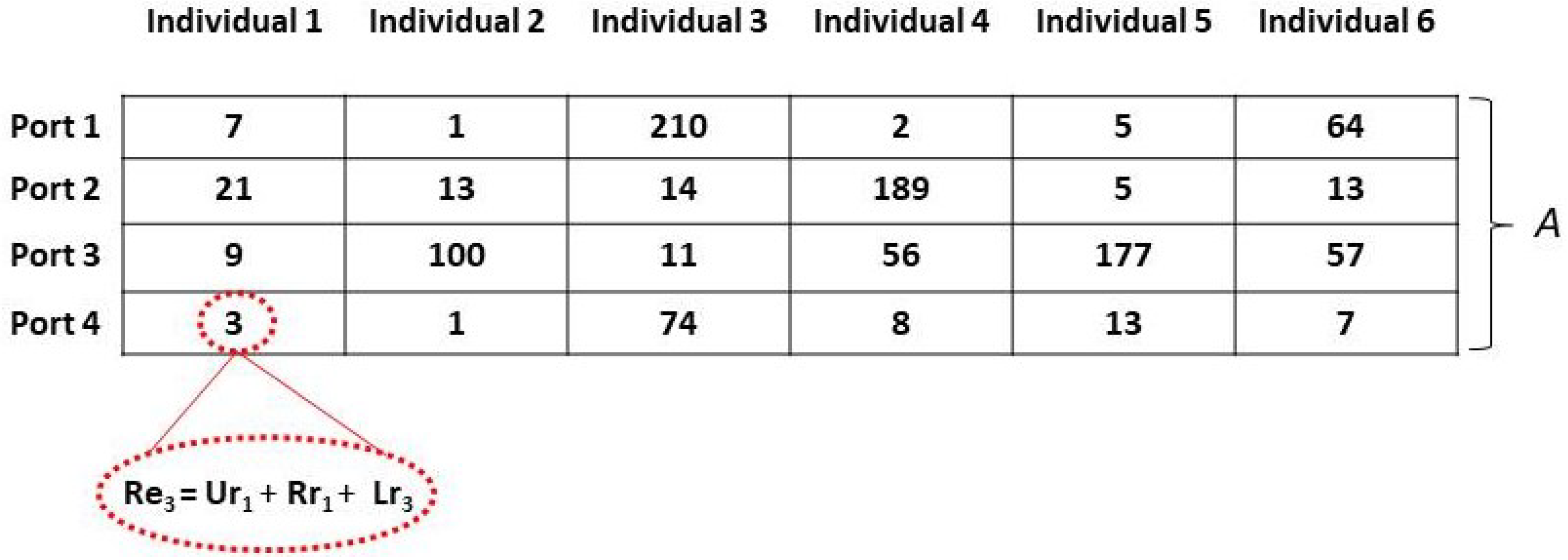
- : the function that defines the correspondence between the k rule, contained in with the rules of unloading, loading, and retrieval to be stored in variables , , and , respectively;
- : the total number of relocations performed.
- : the function that applies the ship’s loading operations through the concomitant execution of and rules. It returns the number of relocations made and the updated matrix.
- : the function that defines the ship’s unloading operation through the execution of the rule. It returns the number of relocations made and the updated matrix.
3.4.3. Selection
4. Results
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ha, M.H.; Yang, Z.; Lam, J.S.L. Port performance in container transport logistics: A multi-stakeholder perspective. Transp. Policy 2019, 73, 25–40. [Google Scholar] [CrossRef]
- Rahman, N.S.F.A.; Ismail, A.; Lun, V.Y. Preliminary study on new container stacking/storage system due to space limitations in container yard. Marit. Bus. Rev. 2016, 1, 21–39. [Google Scholar] [CrossRef]
- Kang, J.G.; Kim, Y.D. Stowage planning in maritime container transportation. J. Oper. Res. Soc. 2002, 53, 415–426. [Google Scholar] [CrossRef]
- Ambrosino, D.; Sciomachen, A.; Tanfani, E. A decomposition heuristics for the container ship stowage problem. J. Heuristics 2006, 12, 211–233. [Google Scholar] [CrossRef]
- Parreño-Torres, C.; Alvarez-Valdes, R.; Parreño, F. Solution Strategies for a Multiport Container Ship Stowage Problem. Math. Probl. Eng. 2019, 2019, 9029267. [Google Scholar] [CrossRef]
- Jin, B.; Zhu, W.; Lim, A. Solving the container relocation problem by an improved greedy look-ahead heuristic. Eur. J. Oper. Res. 2015, 240, 837–847. [Google Scholar] [CrossRef]
- Chul-hwan, H. Assessing the impacts of port supply chain integration on port performance. Asian J. Shipp. Logist. 2018, 34, 129–135. [Google Scholar] [CrossRef]
- Bierwirth, C.; Meisel, F. A follow-up survey of berth allocation and quay crane scheduling problems in container terminals. Eur. J. Oper. Res. 2015, 244, 675–689. [Google Scholar] [CrossRef]
- Azevedo, A.T.; de Salles Neto, L.L.; Chaves, A.A.; Moretti, A.C. Solving the 3D stowage planning problem integrated with the quay crane scheduling problem by representation by rules and genetic algorithm. Appl. Soft Comput. 2018, 65, 495–516. [Google Scholar] [CrossRef]
- Lee, Y.; Lee, Y.J. A heuristic for retrieving containers from a yard. Comput. Oper. Res. 2010, 37, 1139–1147. [Google Scholar] [CrossRef]
- Boysen, N.; Briskorn, D.; Meisel, F. A generalized classification scheme for crane scheduling with interference. Eur. J. Oper. Res. 2016, 258, 343–357. [Google Scholar] [CrossRef]
- Chang, D.; Fang, T.; Fan, Y. Dynamic rolling strategy for multi-vessel quay crane scheduling. Adv. Eng. Inform. 2017, 34, 60–69. [Google Scholar] [CrossRef]
- Kizilay, D.; Eliiyi, D. A comprehensive review of quay crane scheduling, yard operations and integrations thereof in container terminals. Flex. Serv. Manuf. J. 2021, 33, 1–42. [Google Scholar] [CrossRef]
- Yang, Y.; Zhong, M.; Dessouky, Y.; Postolache, O. An integrated scheduling method for AGV routing in automated container terminals. Comput. Ind. Eng. 2018, 126, 482–493. [Google Scholar] [CrossRef]
- Niu, B.; Xie, T.; Tan, L.; Bi, Y.; Wang, Z. Swarm intelligence algorithms for Yard Truck Scheduling and Storage Allocation Problems. Neurocomputing 2016, 188, 284–293. [Google Scholar] [CrossRef]
- Luo, J.; Wu, Y.; Mendes, A.B. Modelling of integrated vehicle scheduling and container storage problems in unloading process at an automated container terminal. Comput. Ind. Eng. 2016, 94, 32–44. [Google Scholar] [CrossRef]
- Tan, C.; He, J.; Wang, Y. Storage yard management based on flexible yard template in container terminal. Adv. Eng. Inform. 2017, 34, 101–113. [Google Scholar] [CrossRef]
- Kaysi, I.; Maddah, B.; Nehme, N.; Mneimneh, F. An integrated model for resource allocation and scheduling in a transshipment container terminal. Transp. Lett. 2012, 4, 143–152. [Google Scholar] [CrossRef]
- Chen, L.; Langevin, A.; Lu, Z. Integrated scheduling of crane handling and truck transportation in a maritime container terminal. Eur. J. Oper. Res. 2013, 225, 142–152. [Google Scholar] [CrossRef]
- Dotoli, M.; Epicoco, N.; Falagario, M.; Seatzu, C.; Turchiano, B. A Decision Support System for Optimizing Operations at Intermodal Railroad Terminals. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 487–501. [Google Scholar] [CrossRef]
- Cavone, G.; Dotoli, M.; Epicoco, N.; Seatzu, C. Intermodal terminal planning by Petri Nets and Data Envelopment Analysis. Control Eng. Pract. 2017, 69, 9–22. [Google Scholar] [CrossRef]
- Iris, C.; Pacino, D. A Survey on the Ship Loading Problem. In Computational Logistics: 6th International Conference, ICCL 2015, Delft, The Netherlands, 23–25 September 2015, Proceedings; Corman, F., Voß, S., Negenborn, R.R., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 238–251. [Google Scholar] [CrossRef]
- Zhao, N.; Mi, W.; Mi, C.; Chai, J. Study on Vessel Slot Planning Problem in Stowage Process of Outbound Containers. J. Appl. Sci. 2015, 13, 4278–4285. [Google Scholar] [CrossRef]
- Avriel, M.; Penn, M.; Shpirer, N.; Witteboon, S. Stowage planning for container ships to reduce the number of shifts. Ann. Oper. Res. 1998, 76, 55–71. [Google Scholar] [CrossRef]
- Ambrosino, D.; Paolucci, M.; Sciomachen, A. Computational evaluation of a MIP model for multi-port stowage planning problems. Soft Comput. 2017, 21, 1753–1763. [Google Scholar] [CrossRef]
- Ding, D.; Chou, M.C. Stowage planning for container ships: A heuristic algorithm to reduce the number of shifts. Eur. J. Oper. Res. 2015, 246, 242–249. [Google Scholar] [CrossRef]
- Dubrovsky, O.; Levitin, G.; Penn, M. A genetic algorithm with a compact solution encoding for the container ship stowage problem. J. Heuristics 2002, 8, 585–599. [Google Scholar] [CrossRef]
- Gümüş, M.K.; Kaminsky, P.M.; Tiemroth, E.; Ayik, M. A Multi-stage Decomposition Heuristic for the Container Stowage Problem. In Proceedings of the 2008 MSOM Conference, College Park, MD, USA, 5–6 June 2008. [Google Scholar]
- Pacino, D.; Delgado, A.; Jensen, R.M.; Bebbington, T. Fast Generation of Near-Optimal Plans for Eco-Efficient Stowage of Large Container Vessels. In Computational Logistics: Second International Conference, ICCL 2011, Hamburg, Germany, 19–22 September 2011, Proceedings; Böse, J.W., Hu, H., Jahn, C., Shi, X., Stahlbock, R., Voß, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 286–301. [Google Scholar] [CrossRef]
- Wilson, I.D.; Roach, P.A. Container Stowage Planning: A Methodology for Generating Computerized Solutions. J. Oper. Res. Soc. 2000, 51, 1248–1255. [Google Scholar] [CrossRef]
- Monaco, M.F.; Sammarra, M.; Sorrentino, G. The terminal-oriented ship stowage planning problem. Eur. J. Oper. Res. 2014, 239, 256–265. [Google Scholar] [CrossRef]
- Çaǧatay, I.; Christensen, J.; Pacino, D.; Ropke, S. Flexible ship loading problem with transfer vehicle assignment and scheduling. Transp. Res. Part B Methodol. 2018, 111, 113–134. [Google Scholar] [CrossRef]
- Ji, M.; Guo, W.; Zhu, H.; Yang, Y. Optimization of loading sequence and rehandling strategy for multi-quay crane operations in container terminals. Transp. Res. Part E 2015, 80, 1–19. [Google Scholar] [CrossRef]
- Caserta, M.; Schwarze, S.; VoSS, S. A mathematical formulation and complexity considerations for the blocks relocation problem. Eur. J. Oper. Res. 2012, 219, 96–104. [Google Scholar] [CrossRef]
- Junqueira, C.; Quiñones, M.P.; de Azevedo, A.T.; Rocco, C.D.; Ohishi, T. An Integrated Optimization Model for the Multi-Port Stowage Planning and the Container Relocation Problems. arXiv 2020, arXiv:2006.06795. [Google Scholar]
- Azevedo, A.T.D.; Ribeiro, C.M.; Sena, G.J.D.; Chaves, A.A.; Neto, L.L.S.; Moretti, A.C. Solving the 3D Container Ship Loading Planning Problem by Representation by Rules and Meta-heuristics. Int. J. Data Anal. Tech. Strateg. 2014, 6, 228–260. [Google Scholar] [CrossRef]
- Burke, E.K.; Gendreau, M.; Hyde, M.; Kendall, G.; Ochoa, G.; Özcan, E.; Qu, R. Hyper-heuristics: A survey of the state of the art. J. Oper. Res. Soc. 2013, 64, 1695–1724. [Google Scholar] [CrossRef]
- Drake, J.H.; Kheiri, A.; Özcan, E.; Burke, E.K. Recent advances in selection hyper-heuristics. Eur. J. Oper. Res. 2020, 285, 405–428. [Google Scholar] [CrossRef]
- Azevedo, A.; Arruda, E.; Leduino, L.; Neto, S.; Chaves, A.; Moretti, A. Application of the Participatory Learning System to Solve the Problem of Loading and Unloading 3D Containers at Port Terminals for Multiple Scenarios. Pesqui. Nav. 2016, 27, 57–68. [Google Scholar]
- Junqueira, C.; Azevedo, A.T.; Ohishi, T. Stowage Planning and Storage Space Assignment of Containers in Port Yards. IX COPEDEC 2016, 9, 1248–1255. [Google Scholar]
- Petering, M.E.H.; Hussein, M.I. A new mixed integer program and extended look-ahead heuristic algorithm for the block relocation problem. Eur. J. Oper. Res. 2013, 231, 120–130. [Google Scholar] [CrossRef]
- Araujo, E.J.; Chaves, A.A.; de Salles Neto, L.L.; de Azevedo, A.T. Pareto clustering search applied for 3D container ship loading plan problem. Expert Syst. Appl. 2016, 44, 50–57. [Google Scholar] [CrossRef]
- Meisel, F.; Wichmann, M. Container sequencing for quay cranes with internal reshuffles. OR Spectr. 2010, 32, 569–591. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems; The University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Michalewicz, Z. Genetic Algorithms + Data Structures = Evolution Programs, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar] [CrossRef]
- Lee, Y.; Hsu, N.Y. An optimization model for the container pre-marshalling problem. Comput. Oper. Res. 2007, 34, 3295–3313. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| I | M | Yard | Ship | N | Results | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| H | W | R | C | B | Time (s) | |||||
| 1 | 1 | 30% | 4 | 5 | 2 | 3 | 3 | 24 | 1 | 0.38 |
| 2 | 60% | 2 | 4 | 3 | 48 | 3 | 0.76 | |||
| 3 | 85% | 3 | 5 | 3 | 68 | 12 | 1.40 | |||
| 4 | 2 | 30% | 4 | 5 | 2 | 3 | 3 | 24 | 1 | 0.37 |
| 5 | 60% | 2 | 4 | 3 | 48 | 5 | 0.83 | |||
| 6 | 85% | 3 | 5 | 3 | 68 | 5 | 1.16 | |||
| 7 | 3 | 30% | 4 | 5 | 2 | 4 | 3 | 24 | 3 | 0.59 |
| 8 | 60% | 3 | 5 | 3 | 48 | 7 | 0.75 | |||
| 9 | 85% | 3 | 6 | 3 | 68 | 8 | 1.56 | |||
| 10 | 1 | 30% | 6 | 25 | 5 | 9 | 3 | 180 | 15 | 7.02 |
| 11 | 60% | 6 | 12 | 3 | 360 | 47 | 22.05 | |||
| 12 | 85% | 4 | 7 | 4 | 512 | 60 | 30.81 | |||
| 13 | 2 | 30% | 6 | 25 | 4 | 7 | 3 | 180 | 14 | 4.44 |
| 14 | 60% | 6 | 10 | 3 | 360 | 44 | 17.45 | |||
| 15 | 85% | 6 | 12 | 3 | 512 | 82 | 22.28 | |||
| 16 | 3 | 30% | 6 | 25 | 6 | 10 | 3 | 180 | 14 | 10.46 |
| 17 | 60% | 6 | 11 | 4 | 360 | 39 | 15.86 | |||
| 18 | 85% | 6 | 13 | 5 | 512 | 87 | 68.86 | |||
| I | M | Yard | Ship | N | Results | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| H | W | R | C | B | Time (s) | |||||
| 19 | 1 | 30% | 10 | 100 | 6 | 13 | 9 | 1200 | 137 | 123.93 |
| 20 | 60% | 6 | 13 | 17 | 2400 | 374 | 436.46 | |||
| 21 | 85% | 6 | 13 | 23 | 3400 | 701 | 804.09 | |||
| 22 | 2 | 30% | 10 | 100 | 6 | 13 | 6 | 1200 | 124 | 89.57 |
| 23 | 60% | 6 | 13 | 12 | 2400 | 350 | 300.79 | |||
| 24 | 85% | 6 | 13 | 17 | 3400 | 687 | 662.38 | |||
| 25 | 3 | 30% | 10 | 100 | 6 | 13 | 13 | 1200 | 126 | 108.24 |
| 26 | 60% | 6 | 13 | 23 | 2400 | 364 | 474.69 | |||
| 27 | 85% | 6 | 13 | 32 | 3400 | 680 | 668.10 | |||
| 28 | 1 | 30% | 20 | 200 | 6 | 13 | 34 | 4800 | 734 | 2598.54 |
| 29 | 60% | 6 | 13 | 66 | 9600 | 2183 | 3959.52 | |||
| 30 | 85% | 6 | 13 | 95 | 13,600 | 4352 | 3649.01 | |||
| 31 | 2 | 30% | 20 | 200 | 6 | 13 | 24 | 4800 | 726 | 1418.72 |
| 32 | 60% | 6 | 13 | 47 | 9600 | 2202 | 3696.73 | |||
| 33 | 85% | 6 | 13 | 67 | 13,600 | 4226 | 3969.72 | |||
| 34 | 3 | 30% | 20 | 200 | 6 | 13 | 44 | 4800 | 730 | 2472.07 |
| 35 | 60% | 6 | 13 | 87 | 9600 | 2296 | 3609.84 | |||
| 36 | 85% | 6 | 13 | 124 | 13,600 | 4972 | 4022.46 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Junqueira, C.; de Azevedo, A.T.; Ohishi, T. Solving the Integrated Multi-Port Stowage Planning and Container Relocation Problems with a Genetic Algorithm and Simulation. Appl. Sci. 2022, 12, 8191. https://doi.org/10.3390/app12168191
Junqueira C, de Azevedo AT, Ohishi T. Solving the Integrated Multi-Port Stowage Planning and Container Relocation Problems with a Genetic Algorithm and Simulation. Applied Sciences. 2022; 12(16):8191. https://doi.org/10.3390/app12168191
Chicago/Turabian StyleJunqueira, Catarina, Anibal Tavares de Azevedo, and Takaaki Ohishi. 2022. "Solving the Integrated Multi-Port Stowage Planning and Container Relocation Problems with a Genetic Algorithm and Simulation" Applied Sciences 12, no. 16: 8191. https://doi.org/10.3390/app12168191
APA StyleJunqueira, C., de Azevedo, A. T., & Ohishi, T. (2022). Solving the Integrated Multi-Port Stowage Planning and Container Relocation Problems with a Genetic Algorithm and Simulation. Applied Sciences, 12(16), 8191. https://doi.org/10.3390/app12168191