
Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade

Abstract
:1. Introduction
2. Principle of Operation and Materials
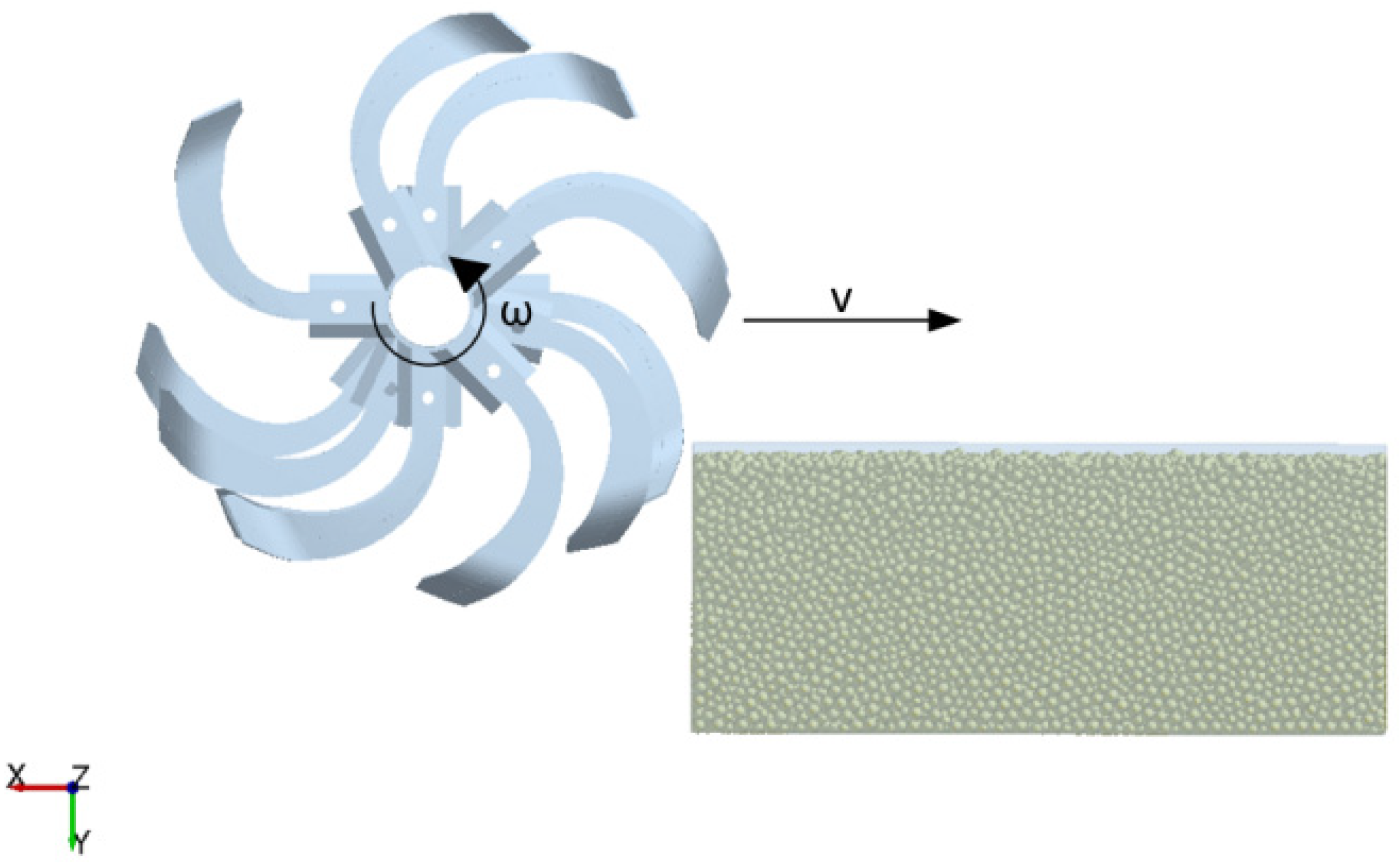
2.1. Model Structure and Motion Analysis
2.2. Determination of Simulation Material Parameters
3. Finite-Element Structural Simulation
3.1. Finite-Element Simulation Method
3.2. Simulation Results of Finite-Element Structure
4. Discrete-Element Dynamic Simulation
4.1. Contact Model and Soil Template Establishment
4.2. Discrete-Element Model of Soil-Rotary Blade Roller
4.3. Simulation Results of Discrete Element Dynamics
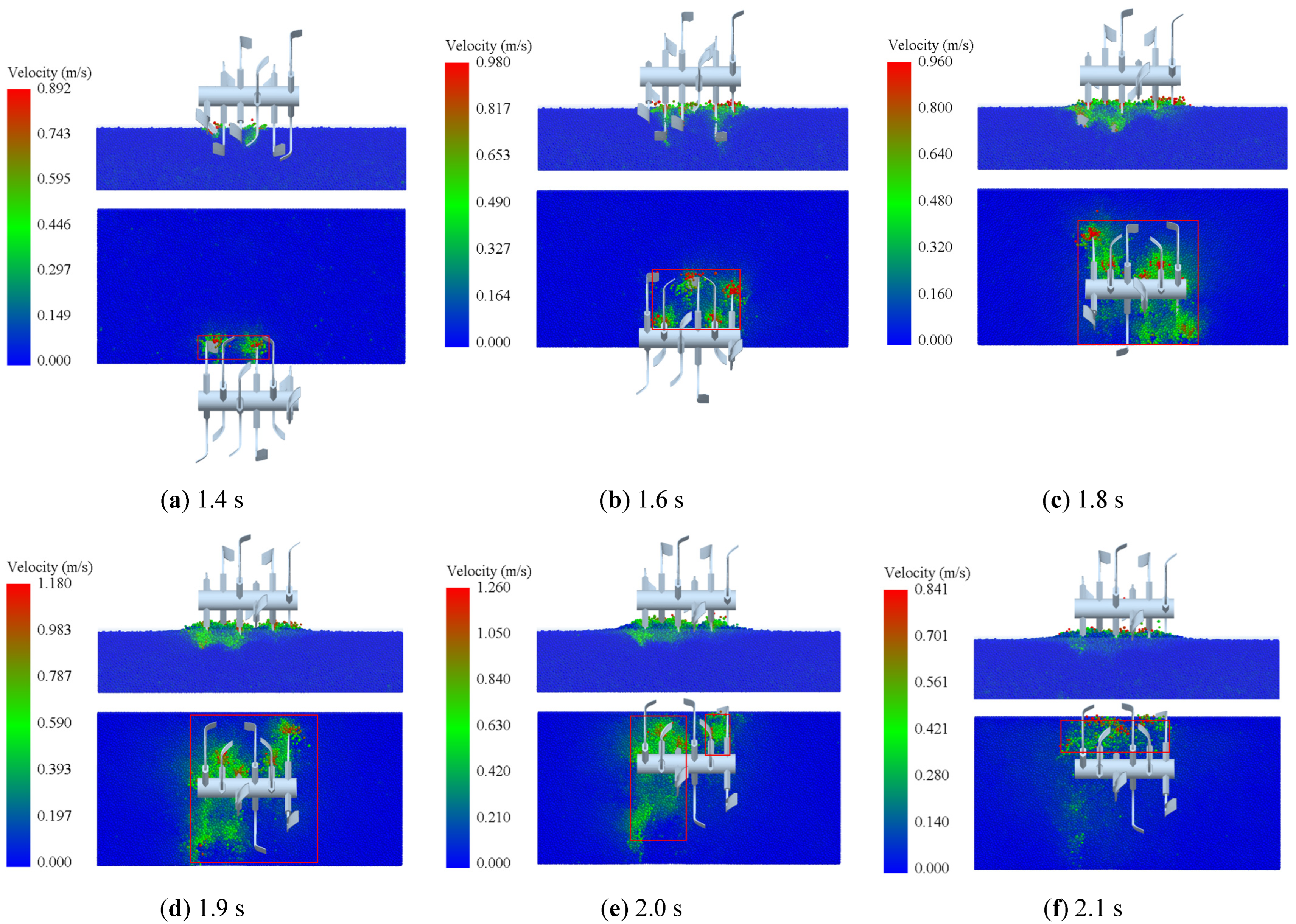
4.3.1. Simulation Results of Cutting Process
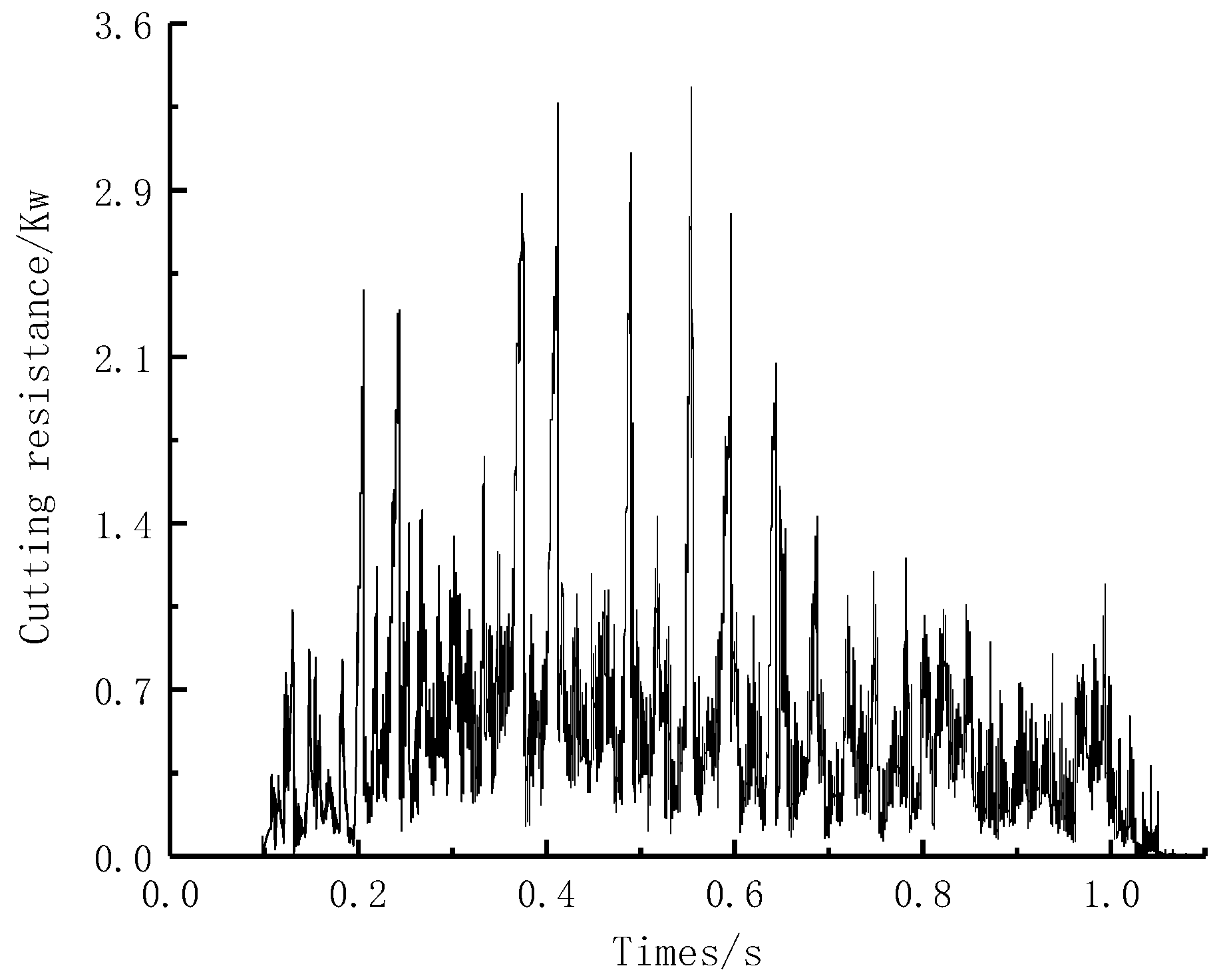
4.3.2. Cutting Force Results and Analysis
5. Power Optimization
5.1. Power Consumption Optimization Test Method
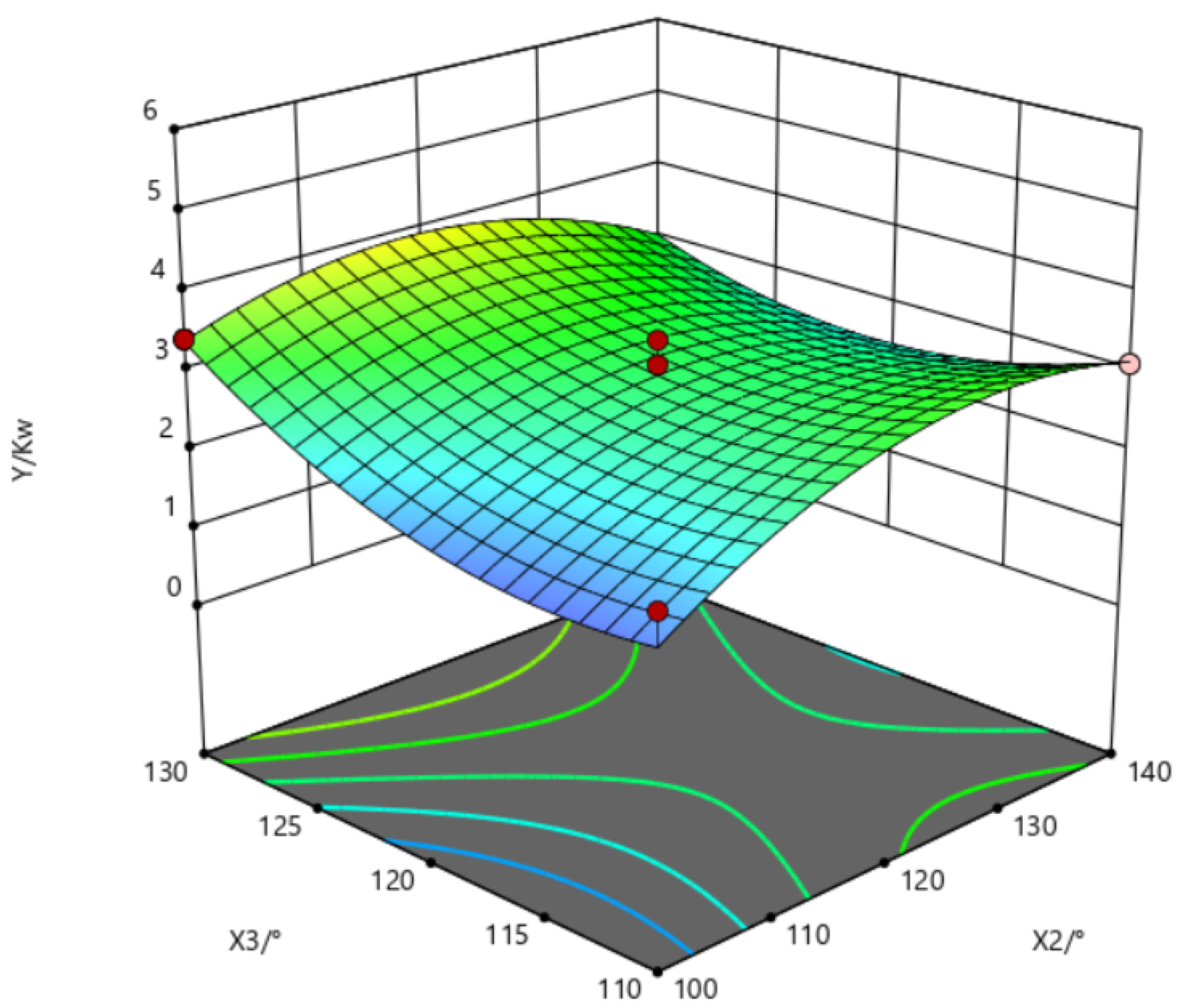
5.2. The Optimization Results
5.3. Field Test Validation
5.4. Experimental Optimization Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qiu, H.; Weng, D.; Lin, D.; Tao, J.; Zhang, Q. Experimental Research on Friction and Wear Properties of Rotary Tiller Wet-land Curved Blade. Lubr. Eng. 2016, 41, 53–56. [Google Scholar]
- Karmakar, S.; Kushwaha, R.L. Dynamic modeling of soil-tool interaction: An overview from a fluid flowperspective. J. Terramechanics 2006, 43, 411–425. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, Z.; Xiao, M.; Pb, B.; Bartos, P.; Bohata, A. Soil-cutting simulation and parameter optimization of rotary blade’s three-axis resistances by response surface method. Comput. Electron. Agric. 2019, 164, 104902. [Google Scholar]
- Makange, N.R. Prediction of cutting forces and soil behavior with discrete element simulation. Comput. Electron. Agric. 2020, 179, 105848. [Google Scholar] [CrossRef]
- Yu, J.; Ma, Y.; Wang, S.; Xu, Z.; Liu, X.; Wang, H.; Qi, H.; Han, L.; Zhuang, J. 3D Finite Element Simulation and Experimental Validation of a Mole Rat’s Digit Inspired Biomimetic Potato Digging Shovel. Appl. Sci. 2022, 12, 1761. [Google Scholar] [CrossRef]
- Bu, H.; Yu, S.; Dong, W.; Wang, Y.; Zhang, L.; Xia, Y. Calibration and Testing of Discrete Element Simulation Parameters for Urea Particles. Processes 2022, 10, 511. [Google Scholar] [CrossRef]
- Wu, J.; Shen, Y.; Yang, S.; Feng, Z. Simulation of Track-Soft Soil Interactions Using a Discrete Element Method. Appl. Sci. 2022, 12, 2524. [Google Scholar] [CrossRef]
- Li, L.; Chen, J.; Ma, C.; Meng, H.; Qi, J.; Li, Y.; Zhang, P.; Lian, G.; Qi, Z. Study on Soil Throwing Performance and Ditch Depth Stability of Ditching Device in Sandy Orchards in Southern Xinjiang. Appl. Sci. 2021, 11, 12058. [Google Scholar] [CrossRef]
- Zhang, L.; Cai, Z.; Liu, H. A novel approach for simulation of soil-tool interaction based on an arbitrary Lagrangian–Eulerian description. Soil Tillage Res. 2018, 178, 41–49. [Google Scholar] [CrossRef]
- Kim, Y.S.; Siddique, M.; Kim, W.S.; Kim, Y.J.; Lim, R.G. DEM simulation for draft force prediction of moldboard plow according to the tillage depth in cohesive soil. Comput. Electron. Agric. 2021, 189, 106368. [Google Scholar] [CrossRef]
- Sunm, J.; Liu, Q.; Luo, P.; Yang, F.; Liu, Z.; Wang, Z. Study on soil erosion law of tractor sloping soil contour rotary tillage. Chin. Soc. Agric. Mec. 2022, 5, 44–56. [Google Scholar]
- Fang, H.M.; Ji, C.Y.; Farman, A.C.; Guo, J.; Zhang, Q.Y.; Chaudhry, A. Analysis of soil motion behavior during rototilling based on discrete element method. Chin. Soc. Agric. Mec. 2016, 47, 22–28. [Google Scholar]
- Liu, Q.; Yang, Y. Research on strength and power consumption of rotary tillage knife based on ANSYS/LS-DYNA. Chin. Reas. Agric. Mechan. 2017, 38, 16–19. [Google Scholar]
- Yang, H.; Zhang, L.; Hu, X.; Fang, Y.; Ge, Y.; Zhu, H.; Yang, D. Simulation and experimental analysis of ditching device of hydraulic-controlled precision fertilizer applicator. Reas. Agric. Mechan. 2021, 43, 35–41. [Google Scholar]
- Zhang, Y.H. Study on Optimization Design and Soil Cutting Performance of Knife Roll of Micro Cultivator. Master’s Thesis, Xi Nan University, Chongqing, China, 2017. [Google Scholar]
- Li, S.; Chen, X.; Chen, W.; Zhu, S.; Li, Y.; Yang, L.; Xie, S.; Yang, M. Soil-cutting simulation and parameter optimization of handheld tiller’s rotary blade by Smoothed Particle Hydrodynamics modelling and Taguchi method. J. Clean. Prod. 2018, 179, 55–62. [Google Scholar] [CrossRef]
- Han, S.J. Design and Test of Organic Fertilizer Deep Applicator in Xinjiang Vineyard. Master’s Thesis, Shihezi University, Shihezi, China, 2021. [Google Scholar]
- China Academy of Agricultural Mechanization Science. Handbook of Agricultural Machinery Design; China Agricultural Science and Technology Press: Beijing, China, 2007. [Google Scholar]
- Wang, X.; Ma, H.; Li, B.; Li, T.; Xia, R.; Bao, Q. Review on the research of contact parameters calibration of particle system. J. Mech. Sci. Technol. 2022, 36, 1363–1378. [Google Scholar] [CrossRef]
- Yuan, Q.; Xu, L.; Xing, J.; Duan, Z.; Ma, S.; Yu, C.; Che, C. Calibration of parameters of mechanical application organic fertilizer granule discrete element model. Chin. Soc. Agric. Eng. 2018, 34, 21–27. [Google Scholar]
- Han, S.; Qi, J.; Kan, Z.; Li, Y.; Meng, H. Calibration of Discrete Element Parameters of Deep Application of Bulk Stalk Fertilizer in Orchards of Xinjiang. Chin. Soc. Agric. Mec. 2021, 52, 101–108. [Google Scholar]
- GB/T 1222-2007; Spring Steel. Standardization Administration of China (SAC): Beijing, China, 2007.
- Li, X.; Zhu, L.; Gong, S. Soil-cutting simulation and dual-objective optimization on tillage process parameters of micro-tiller by smoothed particle Galerkin modeling and genetic algorithm. Comput. Electron. Agric. 2022, 198, 107021. [Google Scholar] [CrossRef]
- Li, S.T. Design, Optimization and Soil Cutting Performance of Rotary Cutter for Microtiller. Master’s Thesis, Xi Nan University, Chongqing, China, 2018. [Google Scholar]
- China Soil Information System (SISChina). China Soil Database; China Statistical Press: Beijing, China, 2018; pp. 372–373. [Google Scholar]
- Zhang, M. Research on power consumption detection of field returning machine based on telemetry technology. Agric. Mach. Use Maint. 2010, 3, 17–18. [Google Scholar]
- Cheng, R.; Wu, Z.; Xu, D. Development of general dynamic telemetry system for agricultural machinery. Agric. Mech. Res. 2010, 32, 157–159, 163. [Google Scholar]
- Kang, J.; Li, S.; Yang, X.; Liu, L.; Li, C. Power consumption simulation analysis and test verification of disc trencher. Chin. Soc. Agric. Eng. 2016, 32, 8–15. [Google Scholar]
- Li, Y. Thoughts on the development of green agricultural machinery. Mod. Agric. Res. 2020, 49, 98–99. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density/(kg·m−3) | Poisson’s Ratio | Shear Modulus/Pa |
|---|---|---|---|
| 65Mn-stell | 7850 | 0.37 | 0.25 × 1010 |
| Soil | 1250 | 0.36 | 1.0 × 106 |
| Parameter | Soil–Soil | Soil–Tool/65Mn |
|---|---|---|
| Recovery coefficient | 0.43 | 0.52 |
| Coefficient of rolling friction | 0.50 | 0.06 |
| Coefficient of static friction | 0.24 | 0.3 |
| Coding | Factors | ||
|---|---|---|---|
| Motion Parameters | Structural Parameters | ||
| X1 Forward Speed m/h | X2 Rotation Speed r/min | X3 Bending Angle/° | |
| 1 | 1400 | 140 | 110 |
| 0 | 1100 | 120 | 120 |
| −1 | 800 | 100 | 130 |
| Serial Number | X1 | X2 | X3 | Cutting Power Consumption Y |
|---|---|---|---|---|
| 1 | −1.000 | −1.000 | 0.000 | 1.640 |
| 2 | 1.000 | −1.000 | 0.000 | 2.212 |
| 3 | −1.000 | 1.000 | 0.000 | 2.391 |
| 4 | 1.000 | 1.000 | 0.000 | 3.286 |
| 5 | −1.000 | 0.000 | −1.000 | 2.347 |
| 6 | 1.000 | 0.000 | −1.000 | 3.970 |
| 7 | −1.000 | 0.000 | 1.000 | 3.805 |
| 8 | 1.000 | 0.000 | 1.000 | 4.736 |
| 9 | 0.000 | −1.000 | −1.000 | 2.270 |
| 10 | 0.000 | 1.000 | −1.000 | 3.111 |
| 11 | 0.000 | −1.000 | 1.000 | 3.420 |
| 12 | 0.000 | 1.000 | 1.000 | 2.630 |
| 13 | 0.000 | 0.000 | 0.000 | 2.500 |
| 14 | 0.000 | 0.000 | 0.000 | 2.955 |
| 15 | 0.000 | 0.000 | 0.000 | 3.410 |
| 16 | 0.000 | 0.000 | 0.000 | 2.854 |
| 17 | 0.000 | 0.000 | 0.000 | 3.101 |
| Source of Variation | Sum of Squares | Degree of Freedom | Mean Square | f Value | p Value | Significance |
|---|---|---|---|---|---|---|
| Model | 7.97 | 9 | 0.8851 | 4.81 | 0.0052 | ** |
| X1 | 2.02 | 1 | 2.02 | 10.98 | 0.0290 | * |
| X2 | 0.4399 | 1 | 0.4399 | 2.39 | 0.1660 | — |
| X3 | 1.05 | 1 | 1.05 | 5.68 | 0.0486 | * |
| X1X2 | 0.0261 | 1 | 0.0261 | 0.1417 | 0.7178 | — |
| X1X3 | 0.1197 | 1 | 0.1197 | 0.6504 | 0.4465 | — |
| X2X3 | 0.6650 | 1 | 0.6650 | 3.61 | 0.0491 | * |
| 0.0796 | 1 | 0.0796 | 0.4325 | 0.5318 | — | |
| 2.18 | 1 | 2.18 | 11.83 | 0.0108 | * | |
| 1.58 | 1 | 1.58 | 8.60 | 0.0220 | * | |
| Residuals | 1.29 | 7 | 0.1841 | |||
| Lack of Fit | 0.8433 | 3 | 0.2811 | 2.53 | 0.1961 | — |
| Pure Error | 0.4452 | 4 | 0.1113 | |||
| Cor Total | 9.25 | 16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Zhang, L.; Hu, X.; Wang, H.; Shi, X.; Ma, X. Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade. Appl. Sci. 2022, 12, 8177. https://doi.org/10.3390/app12168177
Zhang X, Zhang L, Hu X, Wang H, Shi X, Ma X. Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade. Applied Sciences. 2022; 12(16):8177. https://doi.org/10.3390/app12168177
Chicago/Turabian StyleZhang, Xiongye, Lixin Zhang, Xue Hu, Huan Wang, Xuebin Shi, and Xiao Ma. 2022. "Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade" Applied Sciences 12, no. 16: 8177. https://doi.org/10.3390/app12168177
APA StyleZhang, X., Zhang, L., Hu, X., Wang, H., Shi, X., & Ma, X. (2022). Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade. Applied Sciences, 12(16), 8177. https://doi.org/10.3390/app12168177