
Specific Test Design for the In-Depth Technique Analysis of Elite Karate Competitors with the Application of Kinematic Sensors

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Variables
- HA—maximum hand acceleration, expressed in g0;
- tHAS—time for the onset of a hand acceleration;
- tHA—time for the maximum hand acceleration;
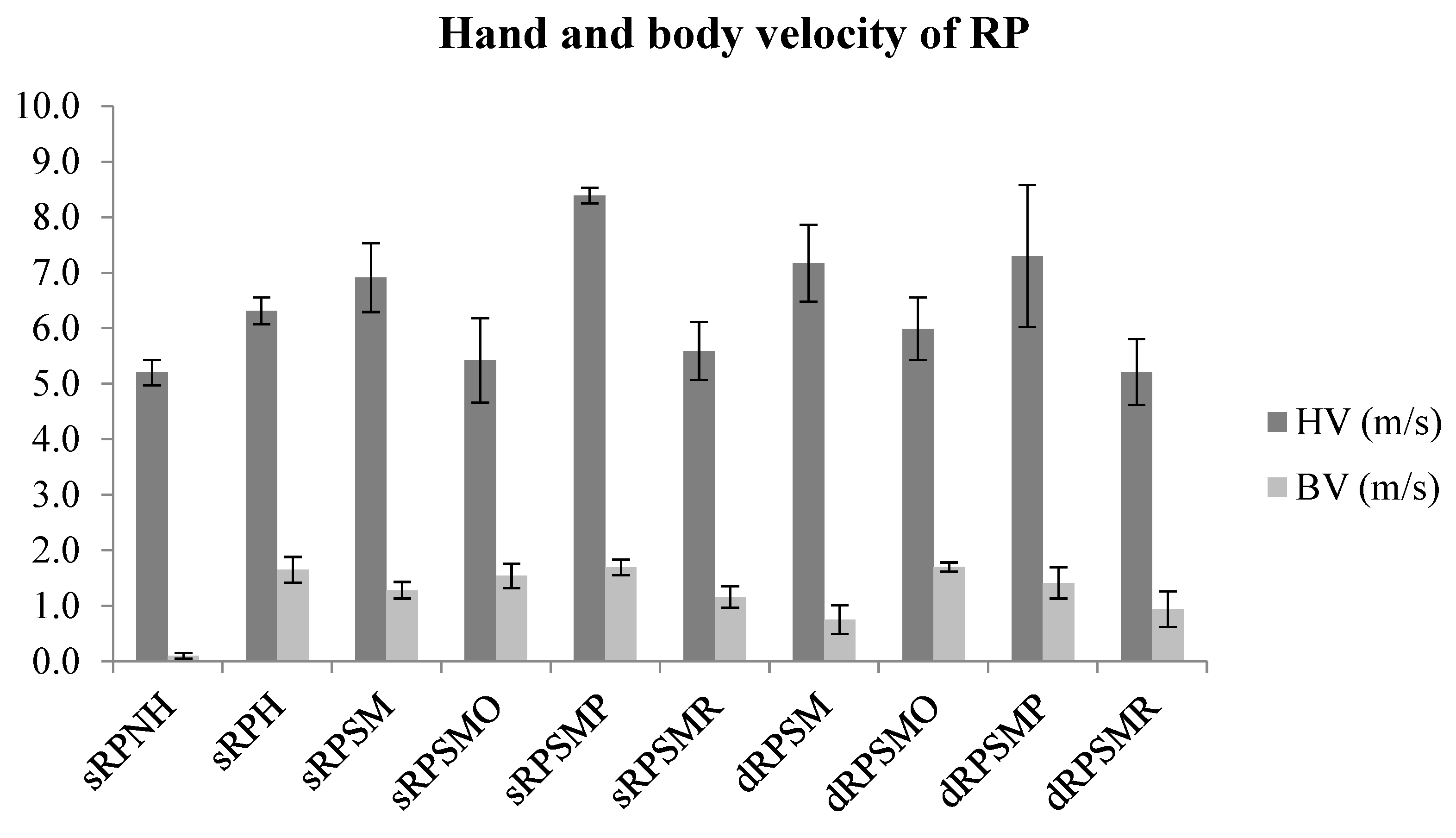
- HV—maximum hand velocity, expressed in m/s;
- tHV—time for the maximum hand velocity;
- BV—maximum body velocity, expressed in m/s;
- tBV—time for the maximum body velocity;
- tBAS—time for the onset of body acceleration;
- BRa—maximal body rotation angle, expressed in deg.
2.2. Procedure
- RPSM: sliding motion preceding RP;
- RPSMO: sliding motion preceding RP, with opponent as a target;
- RPSMP: sliding motion preceding RP, with partner holding chest punch pad;
- RPSMR: sliding motion preceding RP executed on a visual signal.
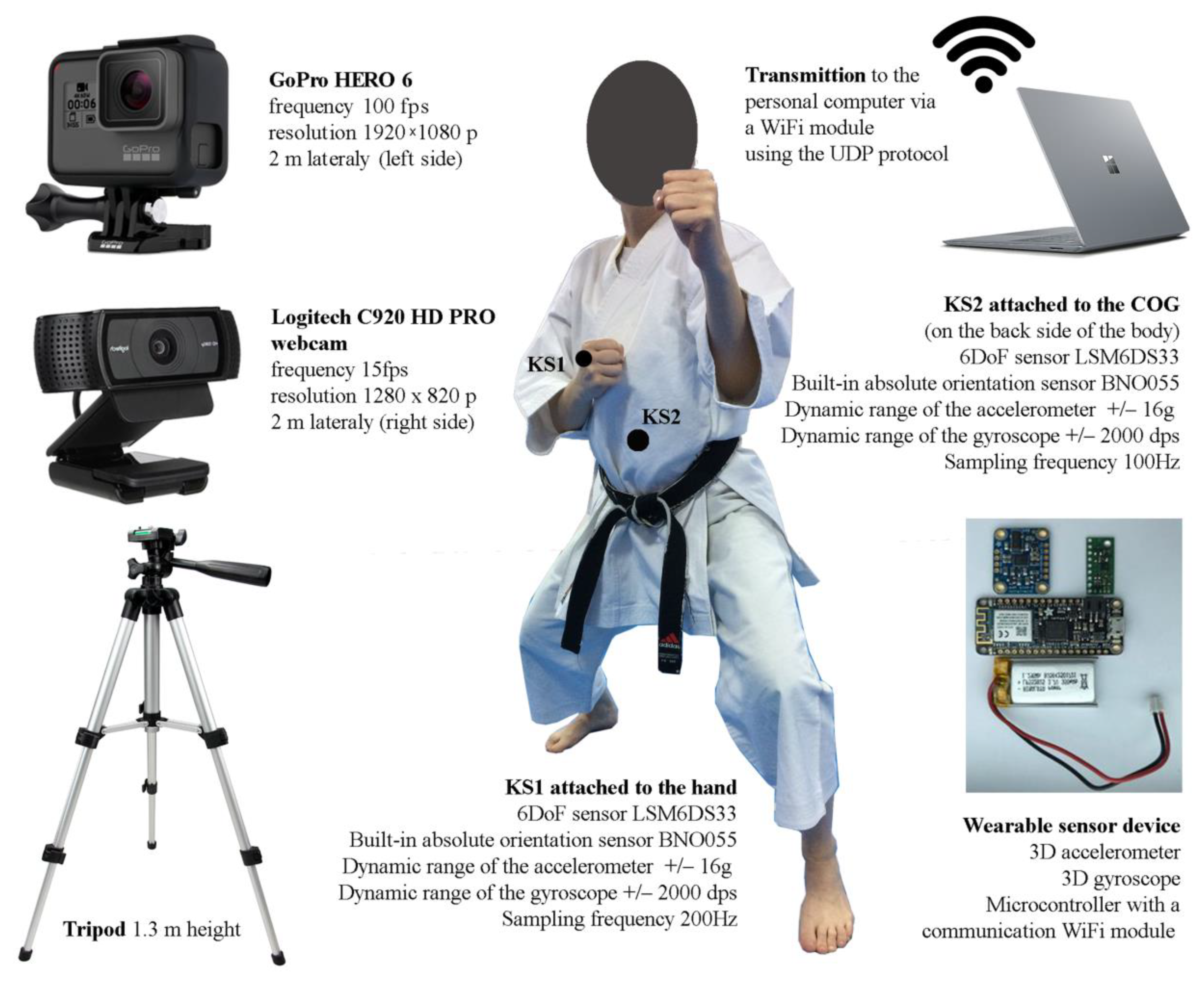
2.3. Experimental Set-Up
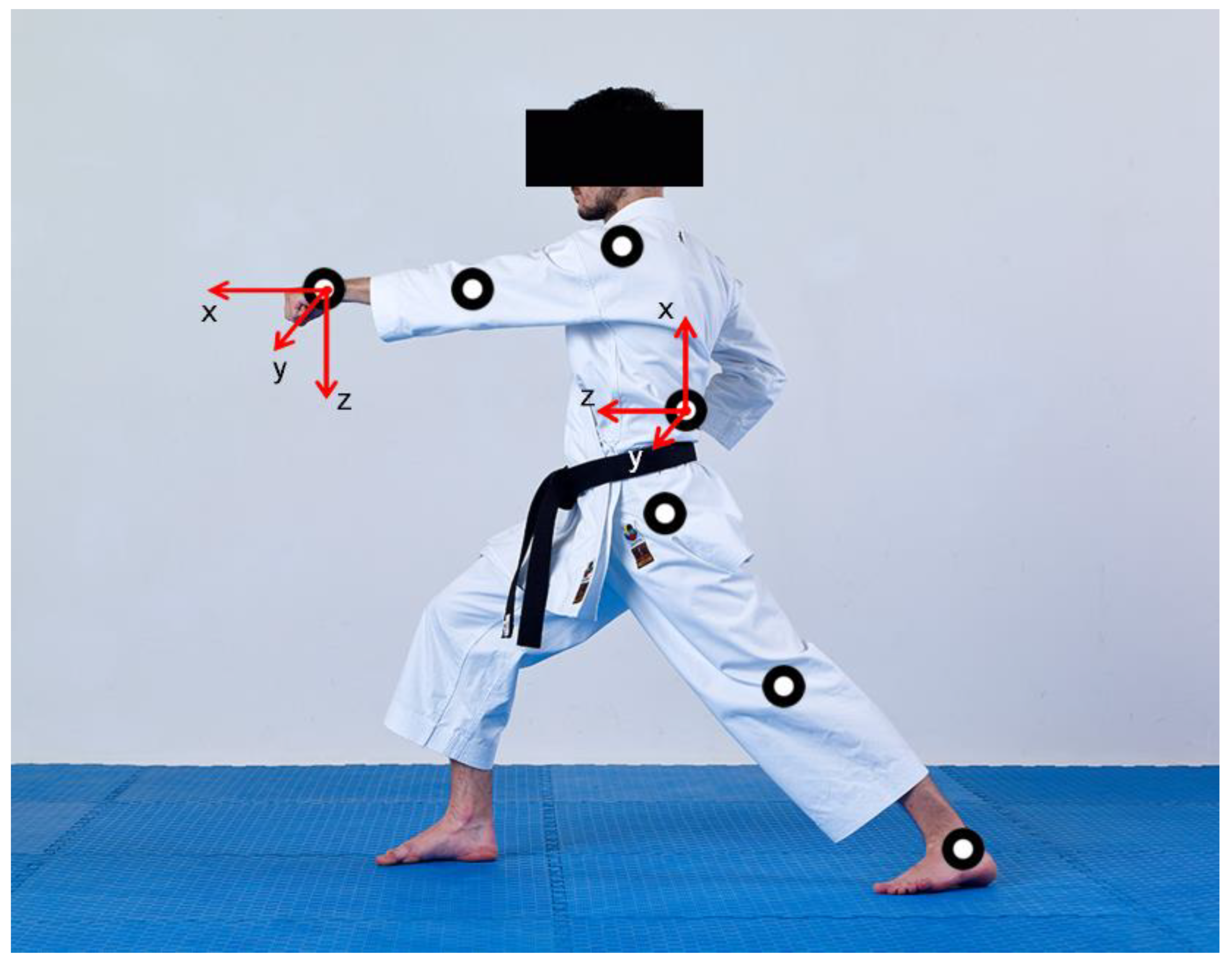
2.4. Sensor Positioning
2.5. Data Processing and Analysis
2.6. Statistics
3. Results and Discussion
Limitations of the Study
4. Conclusions
5. Patents
- 1.
- RPNH (reverse punch, no hip included): Zenkutsu-dachi is the initial stance adopted in the first test. ZD requires straightening the rear leg and positioning both hips 90 degrees relative to the stance direction. This particular positioning of the hips is known as a front position. This kind of set-up suspends the lower part of the kinetic chain from participating in and influencing the punch. The left arm rests alongside and next to the body in order to prevent any additional movement coordinating the opposite arm, which might affect the acceleration of the punch. The elbow of the right arm is flexed at an angle of 90 degrees and rests on the body. The punch is executed in the air.
- 2.
- RPH (reverse punch, hip included): In the remaining test modalities, the initial stance is fudo-dachi. In FD, both legs are flexed at the knee joint, while the hips are positioned at an angle relative to the stance direction (in karate terminology, this is referred to as an open position of hips). Both arms are in a position of readiness to fight (i.e., guard position). The particular set-up allows for the inclusion of the entire kinetic chain in the punch execution. RPH implies that an athlete performs RP including hip rotation, but retaining a static position. The punch is executed in the air.
- 3.
- RPSM (reverse punch in motion): In the third test, RP is performed in motion. The motion adopted is the common pattern motion combined with the reverse punch [5]. It consists of a front leg sliding forward during the punch and sliding back after the punch has been executed. In this way, the path of the punch execution is longer. The punch is executed in the air and there is no target or a marker defining the distance.
- 4.
- RPSMO (reverse punch in motion against an opponent): This test builds on the previously adopted conditions, static position and sliding motion, but involves an opponent as a target. This requires the athlete to adjust the distance in relation to the target and make controlled contact with the opponent’s body. The opponent stands still in FD, in a position of readiness to fight. After the punch execution, the athlete slides back to the initial position.
- 5.
- RPSMP (reverse punch in motion against the chest punching pad): The difference between this test and RPSMO is the type of target. In this test, the opponent is standing still in FD, holding a chest punch pad. This type of target allows for excessive contact and no control. The competitor is still required to return to the starting position after the punch.
- 6.
- RPSMR (reverse punch in motion as a reaction to a visual signal): The last test from a static position with sliding movement preceding the RP is also performed with an opponent. Unlike the previous tests, where the athlete executed a punch when they felt ready, in RPSMR punch is executed on the visual signal of the opponent. The opponent is standing in FD, in a position of readiness to fight. Whenever they feel ready, the opponent lifts their front arm vertically up as a visual signal. As a reaction to the visual signal, the athlete executes RP before sliding back to their initial position.
- 7–10.
- Tests 3–6 are also performed from a dynamic position. The logic behind this is that free movement allows an athlete to find the appropriate distance for an attack by making the necessary adjustments. More importantly, a dynamic starting position is a precondition for the generation of higher ground reaction forces enabling higher punch efficiency [10,47]. In the dynamic test requiring a target, only the athlete performing the punch is allowed to move freely. The opponent, whatever their role is, always takes a static stance with their feet firmly on the ground.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Akbaş, A.; Brachman, A.; Gzik, B.; Bacik, B. The Objective Assessment of Striking Force in Combat Sports using Sport-Specific Measurement Devices—A Review. Arch. Budo. 2021, 17, 205–216. [Google Scholar]
- de Souza, V.A.; Marques, A.M. Relationship between Age and Expertise with the Maximum Impact Force of a Reverse Punch by Shotokan Karate Athletes. Arch. Budo. 2017, 13, 243–254. [Google Scholar]
- Worsey, M.T.O.; Espinosa, H.G.; Shepherd, J.B.; Thiel, D.V. Inertial Sensors for Performance Analysis in Combat Sports: A Systematic Review. Sports 2019, 7, 28. [Google Scholar] [CrossRef] [PubMed]
- Chaabène, H.; Hachana, Y.; Franchini, E.; Mkaouer, B.; Chamari, K. Physical and Physiological Profile of Elite Karate Athletes. Sports Med. 2012, 42, 829–843. [Google Scholar] [CrossRef] [PubMed]
- Koropanovski, N.; Dopsaj, M.; Jovanovic, S. Characteristics of Pointing Actions of Top Male Competitors in Karate at World and European Level. Braz. J. Biomot. 2008, 2, 241–251. [Google Scholar]
- Chaabène, H.; Mkaouer, B.; Franchini, E.; Souissi, N.; Selmi, M.A.; Nagra, Y.; Chamari, K. Physiological Responses and Performance Analysis Difference between Official and Simulated Karate Combat Conditions. Asian J. Sports Med. 2014, 5, 21–29. [Google Scholar] [CrossRef] [PubMed]
- Tabben, M.; Miarka, B.; Chamari, K.; Beneke, R. Decisive-Moment: A Metric to Determine Success in Elite Karate Bouts. Int. J. Sports Physiol. Perform. 2018, 13, 1000–1004. [Google Scholar] [CrossRef] [PubMed]
- Nuri, L.; Shadmehr, A.; Ghotbi, N.; Attarbashi Moghadam, B. Reaction Time and Anticipatory Skill of Athletes in Open and Closed Skill-Dominated Sport. Eur. J. Sport Sci. 2013, 13, 431–436. [Google Scholar] [CrossRef]
- Tabben, M.; Coquart, J.; Chaabène, H.; Franchini, E.; Ghoul, N.; Tourny, C. Time-motion, Tactical and Technical Analysis in Top-Level Karatekas According to Gender, Match Outcome and Weight Categories. J. Sports Sci. 2015, 33, 841–849. [Google Scholar] [CrossRef]
- Loturco, I.; Artioli, G.G.; Kobal, R.; Gil, S.; Franchini, E. Predicting Punching Acceleration from Selected Strength and Power Variables in Elite Karate Athletes: A Multiple Regression Analysis. J. Strength Cond. Res. 2014, 28, 1826–1832. [Google Scholar] [CrossRef] [PubMed]
- Bolander, R.P.; Neto, O.P.; Bir, C.A. The Effects of Height and Distance on the Force Production and Acceleration in Martial Arts Strikes. J. Sports Sci. Med. 2009, 8, 47–52. [Google Scholar] [PubMed]
- Martinez de Quel, O.; Bennett, S.J. Kinematics of Self-Initiated and Reactive Karate Punches. Res. Q. Exerc. Sport 2014, 85, 117–123. [Google Scholar] [CrossRef] [PubMed]
- Mudric, M.; Cuk, I.; Nedeljkovic, A.; Jovanovic, S.; Jaric, S. Evaluation of Video-Based Method for the Measurement of Reaction Time in Specific Sport Situation. Int. J. Perform. Anal. Sport 2015, 15, 1077–1089. [Google Scholar] [CrossRef]
- Zago, M.; Codari, M.; Iaia, F.M.; Sforza, C. Multi-segmental Movements as a Function of Experience in Karate. J. Sports Sci. 2017, 35, 1515–1522. [Google Scholar] [CrossRef] [PubMed]
- Saponara, S. Wearable Biometric Performance Measurement System for Combat Sports. IEEE Trans. Instrum. Meas. 2017, 66, 2545–2555. [Google Scholar] [CrossRef]
- Hachaj, T.; Piekarczyk, M.; Ogiela, M.R. Human Actions Analysis: Templates Generation, Matching and Visualization Applied to Motion Capture of Highly-skilled Karate Athletes. Sensors 2017, 17, 2590. [Google Scholar] [CrossRef] [PubMed]
- Yunana, K.; Alfa, A.A.; Misra, S.; Damasevicius, R.; Maskeliunas, R.; Oluranti, J. Internet of Things: Applications, Adoptions and Components—A Conceptual Overview. In Proceedings of the International Conference on Hybrid Intelligent Systems, Online, 14–16 December 2020; Springer: Cham, Switzerland, 2020; pp. 494–504. [Google Scholar]
- Verma, D.; Singh, K.R.; Yadav, A.K.; Nayak, V.; Singh, J.; Solanki, P.R.; Singh, R.P. Internet of Things (IoT) in Nano-integrated Wearable Biosensor Devices for Healthcare Applications. Biosens. Bioelectron. 2022, 11, 100153. [Google Scholar] [CrossRef]
- Şengül, G.; Karakaya, M.; Misra, S.; Abayomi-Alli, O.O.; Damaševičius, R. Deep Learning Based Fall Detection Using Smartwatches for Healthcare Applications. Biomed. Signal Process. Control 2022, 71, 103242. [Google Scholar] [CrossRef]
- Şengül, G.; Ozcelik, E.; Misra, S.; Damaševičius, R.; Maskeliūnas, R. Fusion of Smartphone Sensor Data for Classification of Daily User Activities. Multimed. Tools Appl. 2021, 80, 33527–33546. [Google Scholar] [CrossRef]
- Taborri, J.; Keogh, J.; Kos, A.; Santuz, A.; Umek, A.; Urbanczyk, C.; van der Kruk, E.; Rossi, S. Sport Biomechanics Applications Using Inertial, Force, and EMG Sensors: A Literature Overview. Appl. Bionics Biomech. 2020, 2020, 2041549. [Google Scholar] [CrossRef]
- Kos, A.; Milutinović, V.; Umek, A. Challenges in Wireless Communication for Connected Sensors and Wearable Devices Used in Sport Biofeedback Applications. Future Gener. Comput. Syst. 2019, 92, 582–592. [Google Scholar] [CrossRef]
- Basak, H.; Kundu, R.; Singh, P.K.; Ijaz, M.F.; Woźniak, M.; Sarkar, R. A Union of Deep Learning and Swarm-based Optimization for 3D Human Action Recognition. Sci. Rep. 2022, 12, 1–17. [Google Scholar]
- Lapinski, M.; Medeiros, C.B.; Scarborough, D.M.; Berkson, E.; Gill, T.J.; Kepple, T.; Paradiso, J.A. A Wide-Range, Wireless Wearable Inertial Motion Sensing System for Capturing Fast Athletic Biomechanics in Overhead Pitching. Sensors 2019, 19, 3637. [Google Scholar] [CrossRef] [PubMed]
- Marković, S.; Kos, A.; Vuković, V.; Dopsaj, M.; Koropanovski, N.; Umek, A. Use of IMU in Differential Analysis of the Reverse Punch Temporal Structure in Relation to the Achieved Maximal Hand Velocity. Sensors 2021, 21, 4148. [Google Scholar] [CrossRef] [PubMed]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Wheeler, K.; James, D.A. Wearable Sensors in Sport: A Practical Guide to Usage and Implementation; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Picerno, P. 25 Years of Lower Limb Joint Kinematics by Using Inertial and Magnetic Sensors: A Review of Methodological Approaches. Gait Posture. 2017, 51, 239–246. [Google Scholar] [CrossRef]
- Wan Idris, W.M.R.; Rafi, A.; Bidin, A.; Jamal, A.A.; Fadzli, S.A. A Systematic Survey of Martial Art Using Motion Capture Technologies: The Importance of Extrinsic Feedback. Multimed. Tools Appl. 2019, 78, 10113–10140. [Google Scholar] [CrossRef]
- Vuković, V.; Dopsaj, M.; Koropanovski, N.; Marković, S.; Kos, A.; Umek, A. Metrical Characteristics and the Reliability of Kinematic Sensor Devices Applied in Different Modalities of Reverse Punch in Karate Athletes. Measurement 2021, 177, 109315. [Google Scholar] [CrossRef]
- Hughes, M.; Bartlett, R. What is Performance Analysis? In Essentials of Performance Analysis in Sport, 2nd ed.; Routledge: London, UK, 2019; pp. 11–20. [Google Scholar] [CrossRef]
- Soper, C.; Hume, P.A. Towards an Ideal Rowing Technique for Performance. Sports Med. 2004, 34, 825–848. [Google Scholar] [CrossRef]
- Loturco, I.; Nakamura, F.Y.; Lopes-Silva, J.P.; Silva-Santos, J.F.; Pereira, L.A.; Franchini, E. Physical and Physiological Traits of a Double World Karate Champion and Responses to a Simulated Kumite Bout: A Case Study. Int. J. Sports Sci. Coach. 2017, 12, 138–147. [Google Scholar] [CrossRef]
- Goethel, M.F.; Ervilha, U.F.; Moreira, P.V.S.; de Paula Silva, V.; Bendillati, A.R.; Cardozo, A.C.; Gonçalves, M. Coordinative Intra-Segment Indicators of Karate Performance. Arch. Budo. 2019, 15, 203–211. [Google Scholar]
- World Karate Federation. Available online: https://www.wkf.net/pdf/WKF_Competition%20Rules_2020_EN.pdf (accessed on 12 December 2021).
- Lenetsky, S.; Harris, N.; Brughelli, M. Assessment and Contributors of Punching Forces in Combat Sports Athletes: Implications for Strength and Conditioning. Strength Cond. J. 2013, 35, 1–7. [Google Scholar] [CrossRef]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. A Real-Time Human Action Recognition System Using Depth and Inertial Sensor Fusion. IEEE Sens. J. 2016, 16, 773–781. [Google Scholar] [CrossRef]
- Boerema, S.T.; van Velsen, L.; Schaake, L.; Tönis, T.M.; Hermens, H.J. Optimal Sensor Placement for Measuring Physical Activity With a 3D Accelerometer. Sensors 2014, 14, 3188–3206. [Google Scholar] [CrossRef] [PubMed]
- McGinnis, R.S.; Perkins, N.C. A Highly Miniaturized, Wireless Inertial Measurement Unit for Characterizing the Dynamics of Pitched Baseballs and Softballs. Sensors 2012, 12, 9. [Google Scholar] [CrossRef]
- Wang, N.; Liu, Y. The Effect of Karate Stance on Atiack-Time: Part II—Reverse Punch. In Proceedings of the 20 International Symposium on Biomechanics in Sports, Cáceres, Spain, 1–5 July 2002; Conference Proceedings Archive. Available online: https://ojs.ub.uni-konstanz.de/cpa/article/view/696 (accessed on 4 February 2022).
- Cesari, P.; Bertucco, M. Coupling between Punch Efficacy and Body Stability for Elite Karate. J. Sci. Med. Sport 2008, 11, 353–356. [Google Scholar] [CrossRef] [PubMed]
- Beránek, V.; Votápek, P.; Stastny, P. Force and Velocity of Impact during Upper Limb Strikes in Combat Sports: A Systematic Review and Meta-Analysis. Sport Biomech. 2020, 19, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Krabben, K.; Orth, D.; van der Kamp, J. Combat as an Interpersonal Synergy: An Ecological Dynamics Approach to Combat Sports. Sports Med. 2019, 49, 1825–1836. [Google Scholar] [CrossRef] [PubMed]
- Tanaka, K.; Hasegawa, M.; Kataoka, T.; Katz, L. The Effect of Self-Position and Posture Information on Reaction Time. Int. J. Comput. Sci. Sport 2002, 9, 4–15. [Google Scholar]
- Vences de Brito, A.; Silva, C. Reaction Time in Karate Athletes. J. Martial Arts Anthropol. 2011, 11, 35–39. [Google Scholar]
- Mori, S.; Ohtani, Y.; Imanaka, K. Reaction Times and Anticipatory Skills of Karate Athletes. Hum. Mov. Sci. 2002, 21, 213–230. [Google Scholar] [CrossRef]
- Lenetsky, S.; Nates, R.J.; Brughelli, M.; Harris, N.K. Is Effective Mass in Combat Sports Punching Above its Weight? Hum. Mov. Sci. 2015, 40, 89–97. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
| Test | tHAS (ms) | tHA (ms) | tHV (ms) | tBAS (ms) | tBV (ms) | HA (g0) | BRa (deg) |
|---|---|---|---|---|---|---|---|
| sRPNH | −120.83 ± 25.58 | −60.83 ± 9.17 | −20.83 ± 9.70 | −135.83 ± 38.00 | −61.67 ± 59.47 | 5.00 ± 0.23 | 14.65 ± 2.66 |
| sRPH | −198.33 ± 9.31 | −56.67 ± 7.53 | −12.50 ± 4.18 | −175.00 ± 22.14 | −45.83 ± 7.36 | 5.39 ± 0.77 | 91.61 ± 1.47 |
| sRPSM | −240.00 ± 18.97 | −61.67 ± 6.83 | −16.67 ± 6.06 | −188.33 ± 16.33 | −58.33 ± 4.08 | 6.09 ± 0.64 | 69.51 ± 10.08 |
| sRPSMO | −235.83 ± 24.98 | −73.33 ± 33.27 | −25.83 ± 8.61 | −186.67 ± 11.69 | −60.00 ± 11.83 | 3.80 ± 0.71 | 50.09 ± 10.22 |
| sRPSMP | −249.17 ± 8.61 | −56.67 ± 6.06 | −15.83 ± 4.92 | −173.33 ± 11.69 | −45.00 ± 7.75 | 7.35 ± 0.47 | 61.24 ± 1.59 |
| sRPSMR | −245.00 ± 31.94 | −80.00 ± 32.71 | −29.17 ± 10.68 | −143.33 ± 39.83 | 23.33 ± 40.33 | 4.69 ± 0.66 | 53.32 ± 4.10 |
| dRPSM | −214.17 ± 12.01 | −54.17 ± 3.76 | −18.33 ± 2.58 | −168.33 ± 82.02 | 39.17 ± 38.13 | 6.85 ± 0.50 | 65.27 ± 3.74 |
| dRPSMO | −225.83 ± 19.60 | −51.67 ± 2.58 | −18.33 ± 4.08 | −179.17 ± 75.33 | −2.50 ± 12.14 | 6.10 ± 0.10 | 66.82 ± 4.03 |
| dRPSMP | −226.67 ± 36.01 | −75.00 ± 29.66 | 0.83 ± 28.18 | −118.33 ± 29.94 | 10.00 ± 33.76 | 6.99 ± 1.23 | 72.89 ± 7.85 |
| dRPSMR | −251.67 ± 23.63 | −51.67 ± 2.89 | −15.00 ± 5.00 | −148.33 ± 10.41 | 20.00 ± 40.93 | 4.87 ± 1.17 | 61.29 ± 4.42 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vuković, V.; Koropanovski, N.; Marković, S.; Kos, A.; Dopsaj, M.; Umek, A. Specific Test Design for the In-Depth Technique Analysis of Elite Karate Competitors with the Application of Kinematic Sensors. Appl. Sci. 2022, 12, 8048. https://doi.org/10.3390/app12168048
Vuković V, Koropanovski N, Marković S, Kos A, Dopsaj M, Umek A. Specific Test Design for the In-Depth Technique Analysis of Elite Karate Competitors with the Application of Kinematic Sensors. Applied Sciences. 2022; 12(16):8048. https://doi.org/10.3390/app12168048
Chicago/Turabian StyleVuković, Vesna, Nenad Koropanovski, Stefan Marković, Anton Kos, Milivoj Dopsaj, and Anton Umek. 2022. "Specific Test Design for the In-Depth Technique Analysis of Elite Karate Competitors with the Application of Kinematic Sensors" Applied Sciences 12, no. 16: 8048. https://doi.org/10.3390/app12168048
APA StyleVuković, V., Koropanovski, N., Marković, S., Kos, A., Dopsaj, M., & Umek, A. (2022). Specific Test Design for the In-Depth Technique Analysis of Elite Karate Competitors with the Application of Kinematic Sensors. Applied Sciences, 12(16), 8048. https://doi.org/10.3390/app12168048