
Fibonacci Wavelet Method for the Solution of the Non-Linear Hunter–Saxton Equation




Abstract
:1. Introduction
2. Fibonacci Wavelets and Operational Matrices
2.1. Fibonacci Wavelets and Function Approximation
2.2. Operational Matrices of Integration via Fibonacci Wavelets
2.3. Quasi-Linearization Technique
3. Method of Solution
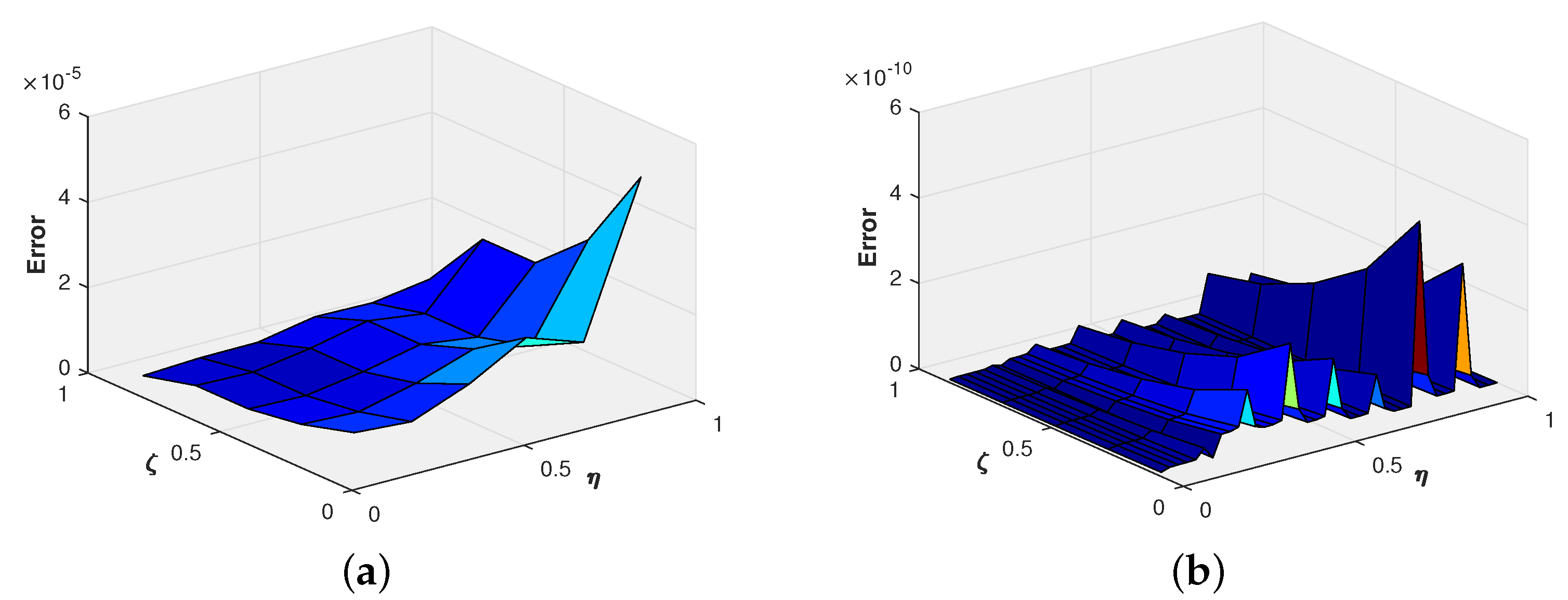
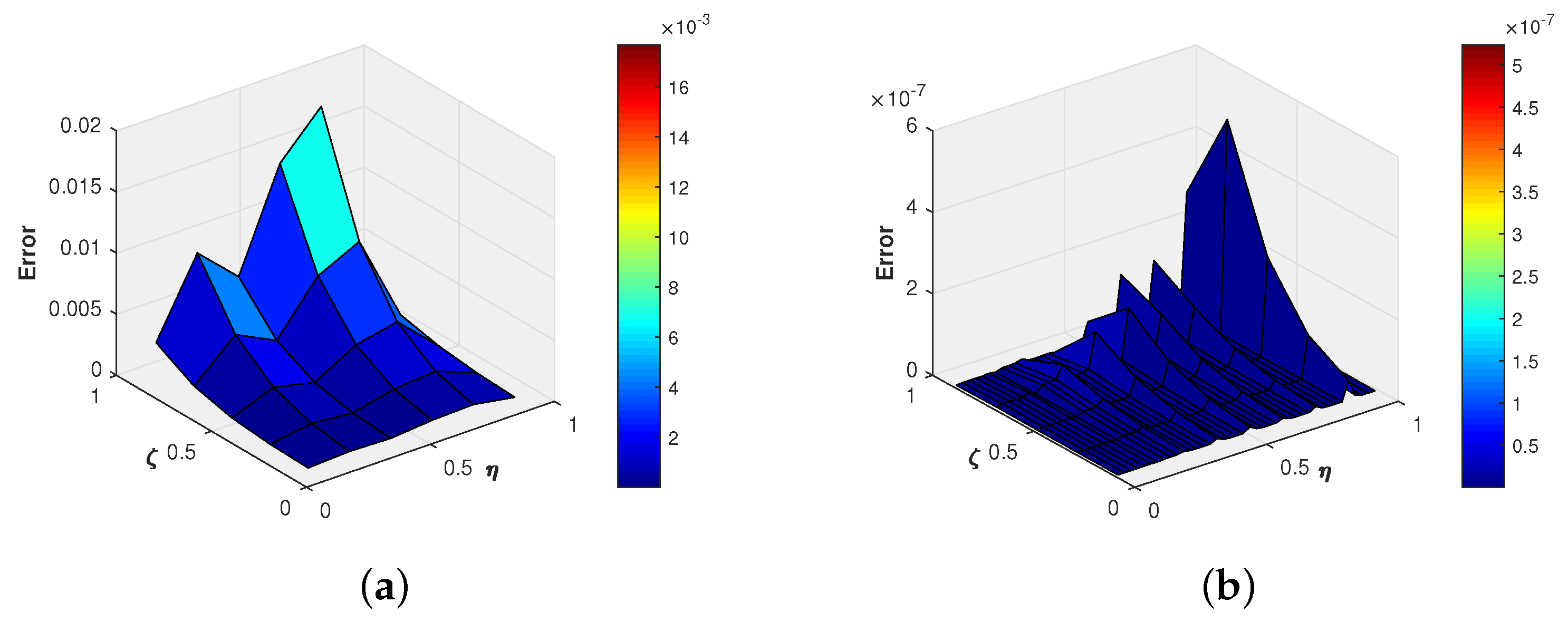
4. Error Estimation and Convergence Analysis
| Algorithm 1: Algorithm for the proposed Fibonacci wavelet method |
|
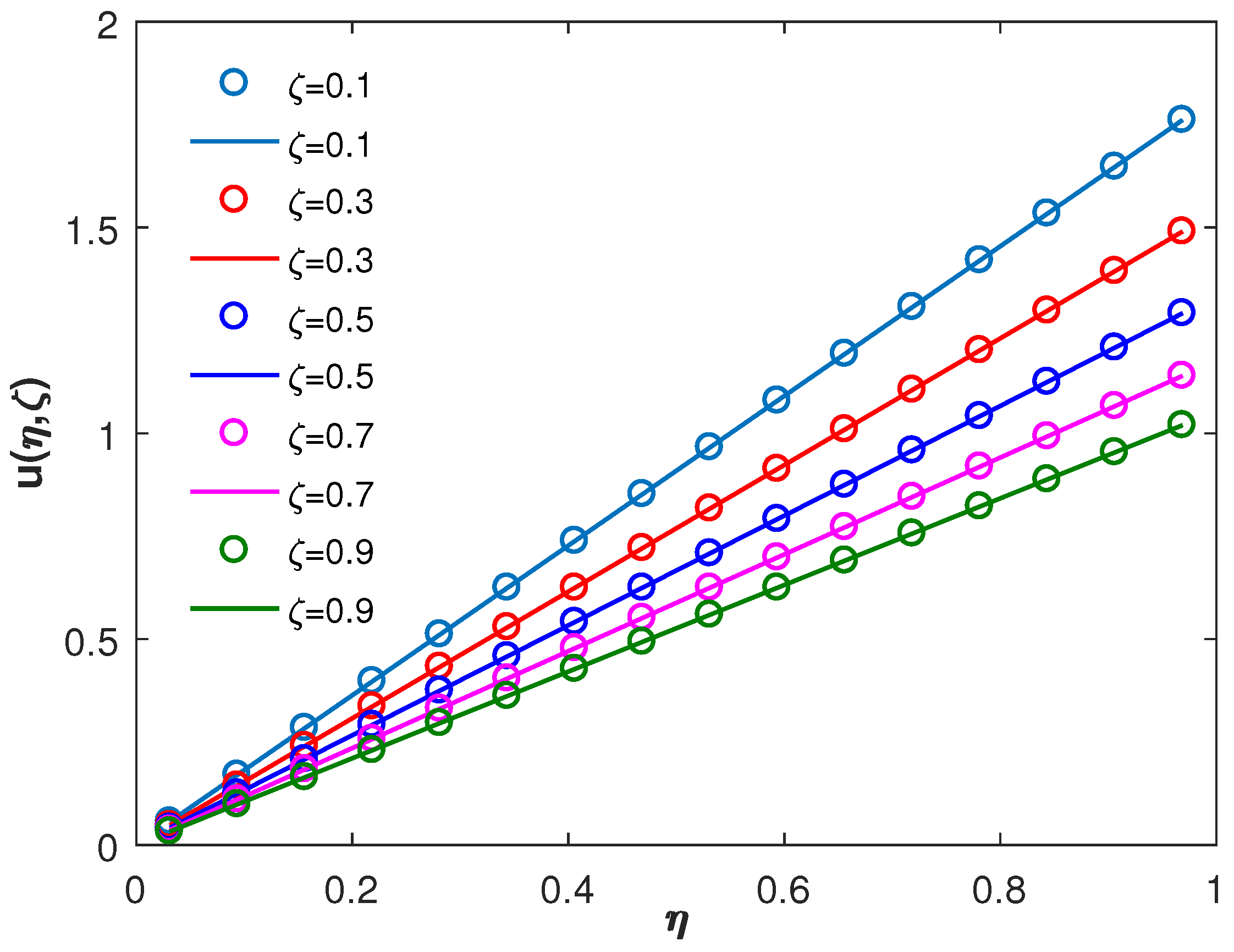
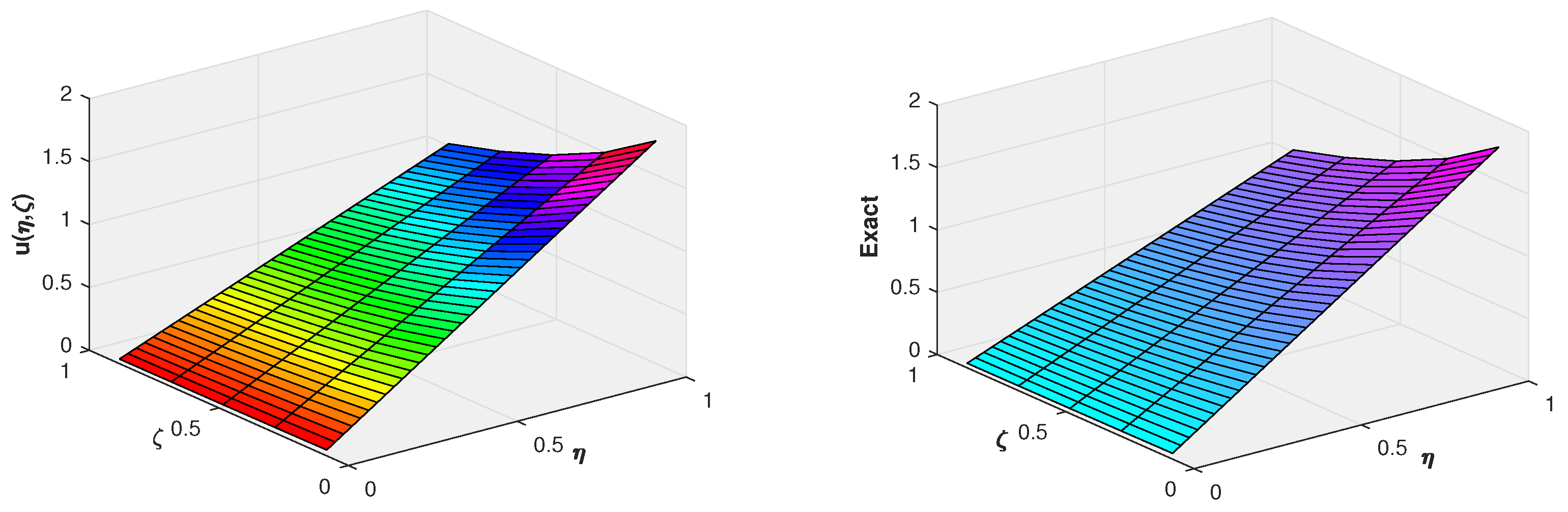
5. Numerical Examples and Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oruç, O. Numerical simulation of two-dimensional and three-dimensional generalized Klein–Gordon–Zakharov equations with power law nonlinearity via a meshless collocation method based on barycentric rational interpolation. Numer. Methods Partial Differ. Equ. 2022, 38, 1068–1089. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, W.O.; Liu, X.; Qu, H. Fourier Spectral Method for a Class of Nonlinear Schrödinger Models. Adv. Math. Phys. 2021, 2021, 9934858. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, W.; Du, H. A new reproducing kernel method for Duffing equations. Int. J. Comput. Math. 2021, 98, 2341–2354. [Google Scholar] [CrossRef]
- Hunter, J.K.; Saxton, R. Dynamics of director fields. SIAM J. Appl. Math. 1991, 51, 1498–1521. [Google Scholar] [CrossRef]
- Behzadi, S.S. Numerical solution of Hunter–Saxton equation by using iterative methods. Int. J. Math. Math. Sci. 2011, 3, 127–143. [Google Scholar]
- Wei, X.; Yin, Z. Global existence and blow-up phenomena for the periodic Hunter–Saxton equation with weak dissipation. J. Nonlinear Math. Phys. 2011, 18, 139–149. [Google Scholar] [CrossRef]
- Aratyn, H.; Gomes, J.F.; Ruy, D.V.; Zimerman, A.H. Rational solutions from Padé approximants for the generalized Hunter–Saxton equation. J. Phys. Conf. Ser. 2013, 474, 012006. [Google Scholar] [CrossRef] [Green Version]
- Rouhparvar, H. Analytical solution of the Hunter–Saxton equation using the reduced differential transform method. J. Approx. Theory 2016, 10, 61–73. [Google Scholar]
- Hashmi, M.S.; Awais, M.; Waheed, A.; Ali, Q. Numerical treatment of Hunter–Saxton equation using cubic trigonometric B-spline collocation method. AIP Adv. 2017, 7, 095124. [Google Scholar] [CrossRef] [Green Version]
- Karaagac, B.; Esen, A. The Hunter–Saxton Equation: A numerical approach using collocation method. Numer. Methods Partial. Differ. Equ. 2018, 34, 1637–1644. [Google Scholar] [CrossRef]
- Sato, S. Stability and convergence of a conservative finite difference scheme for the modified Hunter–Saxton equation. BIT Numer. Math. 2019, 59, 213–241. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, I.; Ilyas, H.; Kutlu, K.; Anam, V.; Hussain, S.I.; Guirao, J.L.G. Numerical computing approach for solving Hunter–Saxton equation arising in liquid crystal model through sinc collocation method. Heliyon 2021, 7, E07600. [Google Scholar] [CrossRef] [PubMed]
- Debnath, L.; Shah, F.A. Wavelet Transforms and Their Applications; Birkhäuser: New York, NY, USA, 2015. [Google Scholar]
- Lepik, U.; Hein, H. Haar Wavelets with Applications; Springer: New York, NY, USA, 2014. [Google Scholar]
- Shah, F.A.; Irfan, M.; Nisar, K.S.; Matoog, R.T.; Mahmoud, E.E. Fibonacci wavelet method for solving time-fractional telegraph equations with Dirichlet boundary conditions. Results Phys. 2021, 24, 104–123. [Google Scholar] [CrossRef]
- Shah, F.A.; Irfan, M. Generalized wavelet method for solving fractional bioheat transfer model during hyperthermia treatment. Int. J. Wavelets Multiresolut. Inf. Process. 2021, 19, 2050090. [Google Scholar] [CrossRef]
- Irfan, M.; Shah, F.A.; Nisar, K.S. Gegenbauer wavelet quasi-linearization method for solving fractional population growth model in a closed system. Math. Methods. Appl. Sci. 2022, 45, 3605–3623. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Shah, F.A.; Abass, R. An application of the Gegenbauer wavelet method for the numerical solution of the fractional Bagley-Torvik equation. Russ. J. Math. Phys. 2019, 26, 77–93. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Shah, F.A.; Irfan, M. Generalized wavelet quasi-linearization method for solving population growth model of fractional order. Math. Methods Appl. Sci. 2020, 43, 8753–8762. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Irfan, M.; Shah, F.A. A Fibonacci Wavelet method for solving dual-phase-lag heat transfer model in multi-layer skin tissue during hyperthermia treatment. Energies 2021, 14, 2254. [Google Scholar] [CrossRef]
- Chouhan, D.; Mishra, V.; Srivastava, H.M. Bernoulli wavelet method for numerical solution of anomalous infiltration and diffusion modeling by nonlinear fractional differential equations of variable order. Results Appl. Math. 2021, 10, 1–13. [Google Scholar] [CrossRef]
- Sabermahani, S.; Ordokhani, Y.; Yousefi, S.A. Fibonacci wavelets and their applications for solving two classes of time-varying delay problems. Optim. Control Appl. Meth. 2019, 41, 395–416. [Google Scholar] [CrossRef]
- Arbabi, S.; Nazari, A.; Darvishi, M.T. A semi-analytical solution of Hunter–Saxton equation. Optik 2016, 127, 5255–5258. [Google Scholar] [CrossRef]
- Srinivasa, K.; Rezazadeh, H.; Adel, W. Numerical investigation based on Laguerre wavelet for solving the Hunter Saxton equation. Int. J. Appl. Comput. Math. 2020, 6, 139. [Google Scholar] [CrossRef]
- Falcon, S.; Plaza, A. On k-Fibonacci sequences and polynomials and their derivatives. Chaos Soliton Fract. 2009, 39, 1005–1019. [Google Scholar] [CrossRef]
- Nalli, A.; Haukkanen, P. On generalized Fibonacci and Lucas polynomials. Chaos Soliton Fract. 2009, 42, 3179–3186. [Google Scholar] [CrossRef]
- Lee, S.; Asci, M. Some Properties of the (p,q)-Fibonacci and (p,q)-Lucas Polynomials. J. Appl. Math. 2012, 2012, 264842. [Google Scholar] [CrossRef] [Green Version]
- Catarino, P. A note on h(x)-Fibonacci quaternion polynomials. Chaos Soliton Fract. 2015, 77, 1–5. [Google Scholar] [CrossRef]
- Strzałka, D.; Wolski, S.; Wioch, A. Distance Fibonacci polynomials by graph methods. Symmetry. 2021, 13, 2075. [Google Scholar] [CrossRef]
- Koç, A.B.; Çakmak, M.; Kurnaz, A. A matrix method based on the Fibonacci polynomials to the generalized pantograph equations with functional arguments. Adv. Math. Phys. 2014, 2014, 694580. [Google Scholar] [CrossRef]
- Seifi, A.; Lotfi, T.; Allahviranloo, T. A new efficient method using Fibonacci polynomials for solving of first-order fuzzy Fredholm-Volterra integro-differential equations. Soft Comput. 2019, 23, 9777–9791. [Google Scholar] [CrossRef]
- Sabermahani, S.; Ordokhani, O.; Yousefi, S.A. Fractional-order Fibonacci-hybrid functions approach for solving fractional delay differential equations. Eng. Comput. 2020, 36, 795–806. [Google Scholar] [CrossRef]
- Mohamed, A.S. Fibonacci collocation pseudo-spectral method of variable-order space-fractional diffusion equations with error analysis. AIMS Math. 2022, 7, 14323–14337. [Google Scholar] [CrossRef]
- Chen, C.F.; Hsiao, C.H. Haar wavelet method for solving lumped and distributed-parameter systems. IEE Proc. Control Theory Appl. 1997, 144, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Falcon, S.; Plaza, A. The k-Fibonacci sequence and the Pascal 2-triangle. Chaos Solitons Fract. 2007, 33, 38–49. [Google Scholar] [CrossRef]
- Bellman, R.E.; Kalaba, R.E. Quasi-linearization and Non-linear Boundary-Value Problems; Elsevier: New York, NY, USA, 1965. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Present Method | Haar Wavelet Method [23] | B-Spline [9] | |
|---|---|---|---|
| 0.1 | |||
| 0.2 | |||
| 0.3 | |||
| 0.4 | |||
| 0.5 | |||
| 0.6 | |||
| 0.7 | |||
| 0.8 | |||
| 0.9 |
| Present Method | Haar Wavelet Method [23] | B-Spline [9] | |
|---|---|---|---|
| 0.1 | |||
| 0.2 | |||
| 0.3 | |||
| 0.4 | |||
| 0.5 | |||
| 0.6 | |||
| 0.7 | |||
| 0.8 | |||
| 0.9 |
| Present Method | Haar Wavelet Method [23] | B-Spline [9] | |
|---|---|---|---|
| 0.1 | |||
| 0.2 | |||
| 0.3 | |||
| 0.4 | |||
| 0.5 | |||
| 0.6 | |||
| 0.7 | |||
| 0.8 | |||
| 0.9 |
| Present Method | Laguerre Wavelet Method [24] | B-Spline [9] | |
|---|---|---|---|
| 0.1 | |||
| 0.2 | |||
| 0.3 | |||
| 0.4 | |||
| 0.5 | |||
| 0.6 | |||
| 0.7 | |||
| 0.8 | |||
| 0.9 |
| Present Method | Laguerre Wavelet Method [24] | B-Spline [9] | |
|---|---|---|---|
| 0.1 | |||
| 0.2 | |||
| 0.3 | |||
| 0.4 | |||
| 0.5 | |||
| 0.6 | |||
| 0.7 | |||
| 0.8 | |||
| 0.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Srivastava, H.M.; Shah, F.A.; Nayied, N.A. Fibonacci Wavelet Method for the Solution of the Non-Linear Hunter–Saxton Equation. Appl. Sci. 2022, 12, 7738. https://doi.org/10.3390/app12157738
Srivastava HM, Shah FA, Nayied NA. Fibonacci Wavelet Method for the Solution of the Non-Linear Hunter–Saxton Equation. Applied Sciences. 2022; 12(15):7738. https://doi.org/10.3390/app12157738
Chicago/Turabian StyleSrivastava, H. M., Firdous A. Shah, and Naied A. Nayied. 2022. "Fibonacci Wavelet Method for the Solution of the Non-Linear Hunter–Saxton Equation" Applied Sciences 12, no. 15: 7738. https://doi.org/10.3390/app12157738
APA StyleSrivastava, H. M., Shah, F. A., & Nayied, N. A. (2022). Fibonacci Wavelet Method for the Solution of the Non-Linear Hunter–Saxton Equation. Applied Sciences, 12(15), 7738. https://doi.org/10.3390/app12157738