
Design and Implementation of the Remote Operation and Maintenance Platform for the Combine Harvester

Abstract
:1. Introduction
2. Materials and Methods
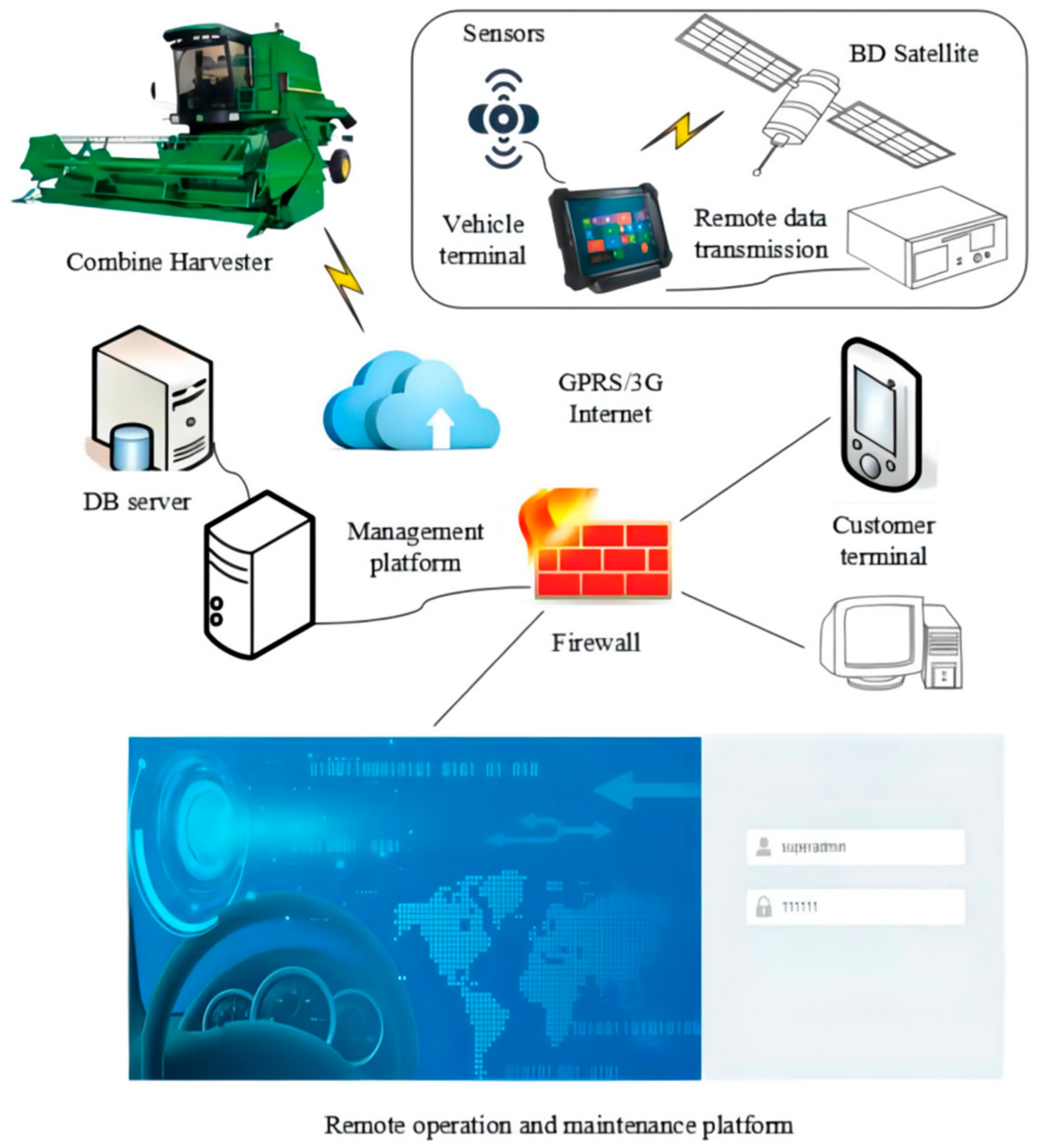
2.1. Overall System Structure
2.2. Overall Platform Architecture and Functional Module Design
2.2.1. Overall Platform Architecture
2.2.2. Platform Function Module Design
- (1)
- Data monitoring
- (2)
- Failure prediction
- (3)
- Fault diagnosis
- (4)
- Comprehensive operation maintenance
2.3. Platform Development Key Technology
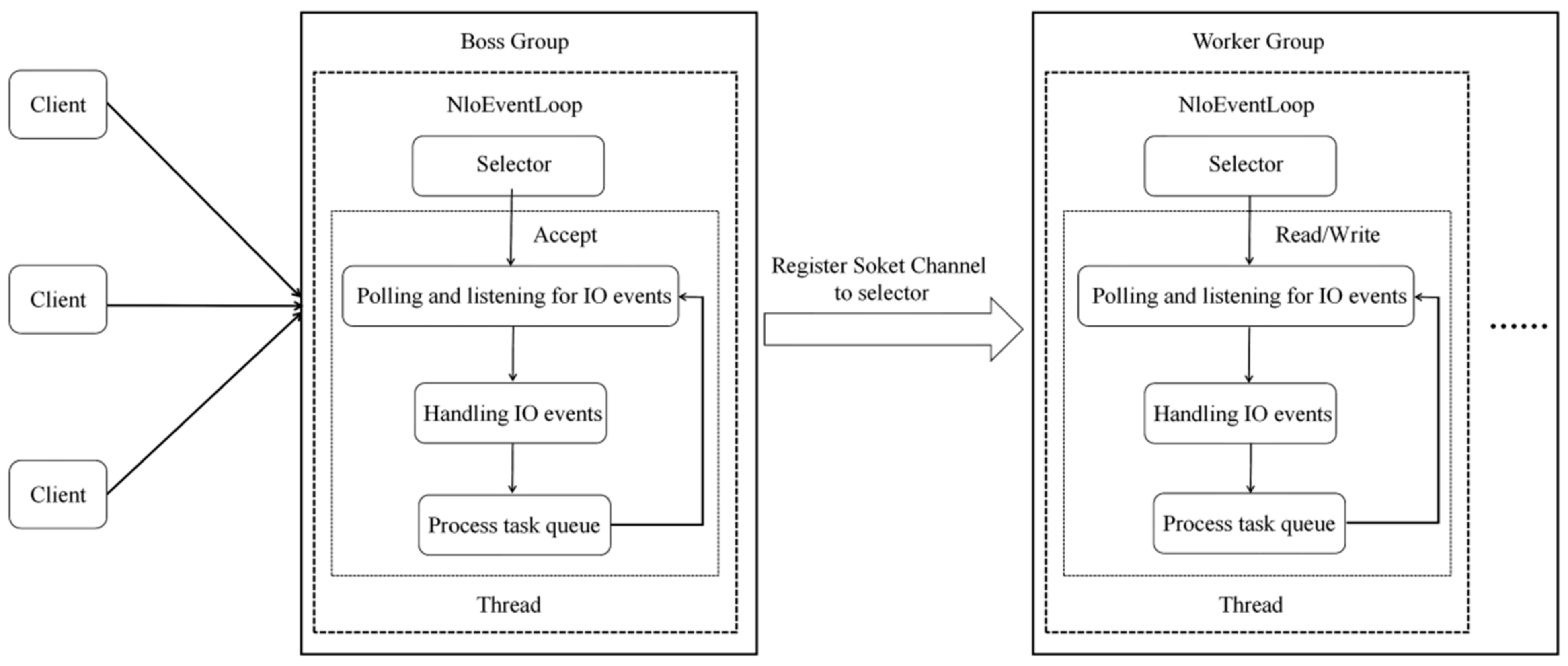
- (1)
- Socket
- (2)
- Web-GIS
- (3)
- AJAX
2.4. Platform Function Realization
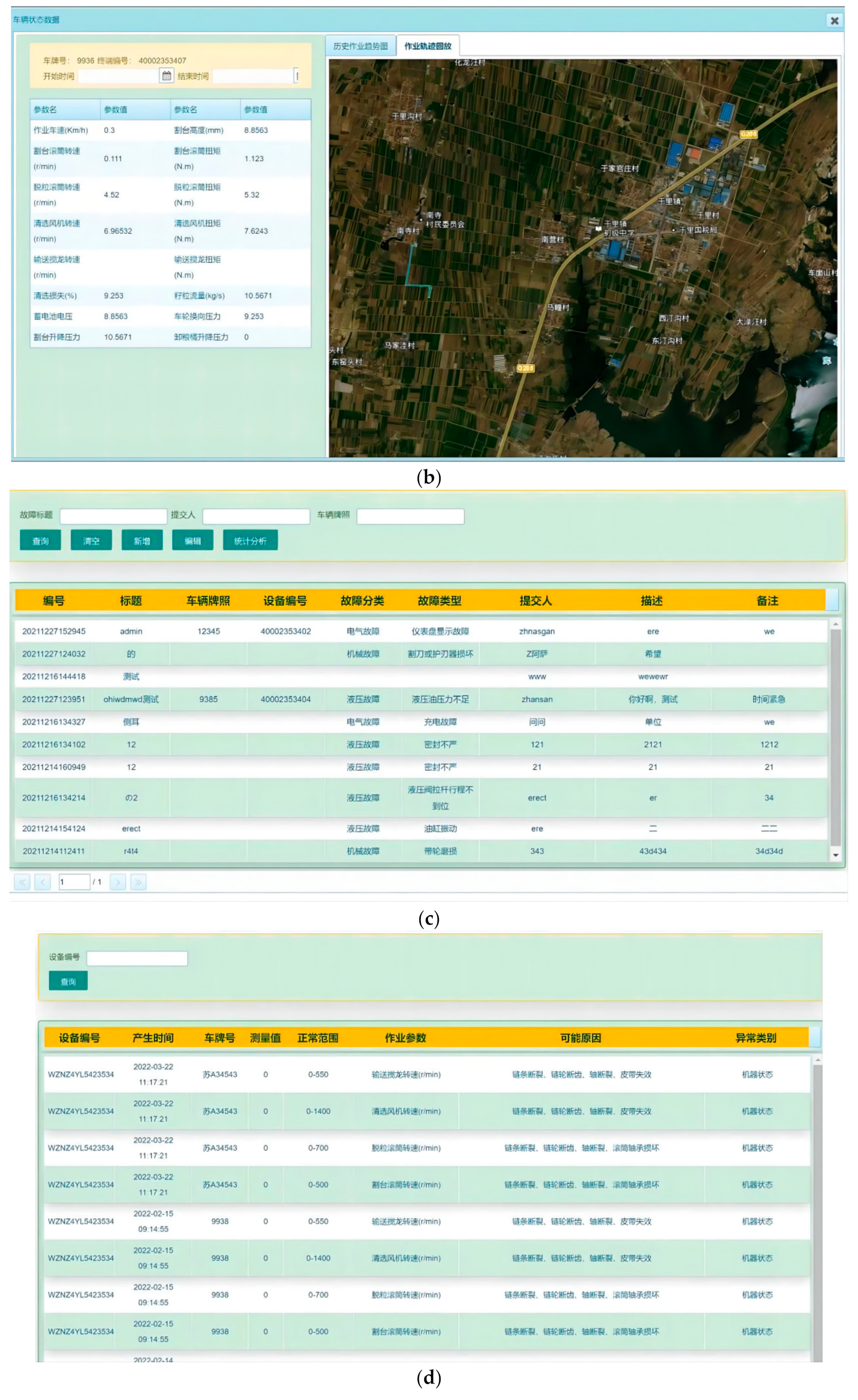
2.4.1. Data Monitoring
2.4.2. Failure Prediction
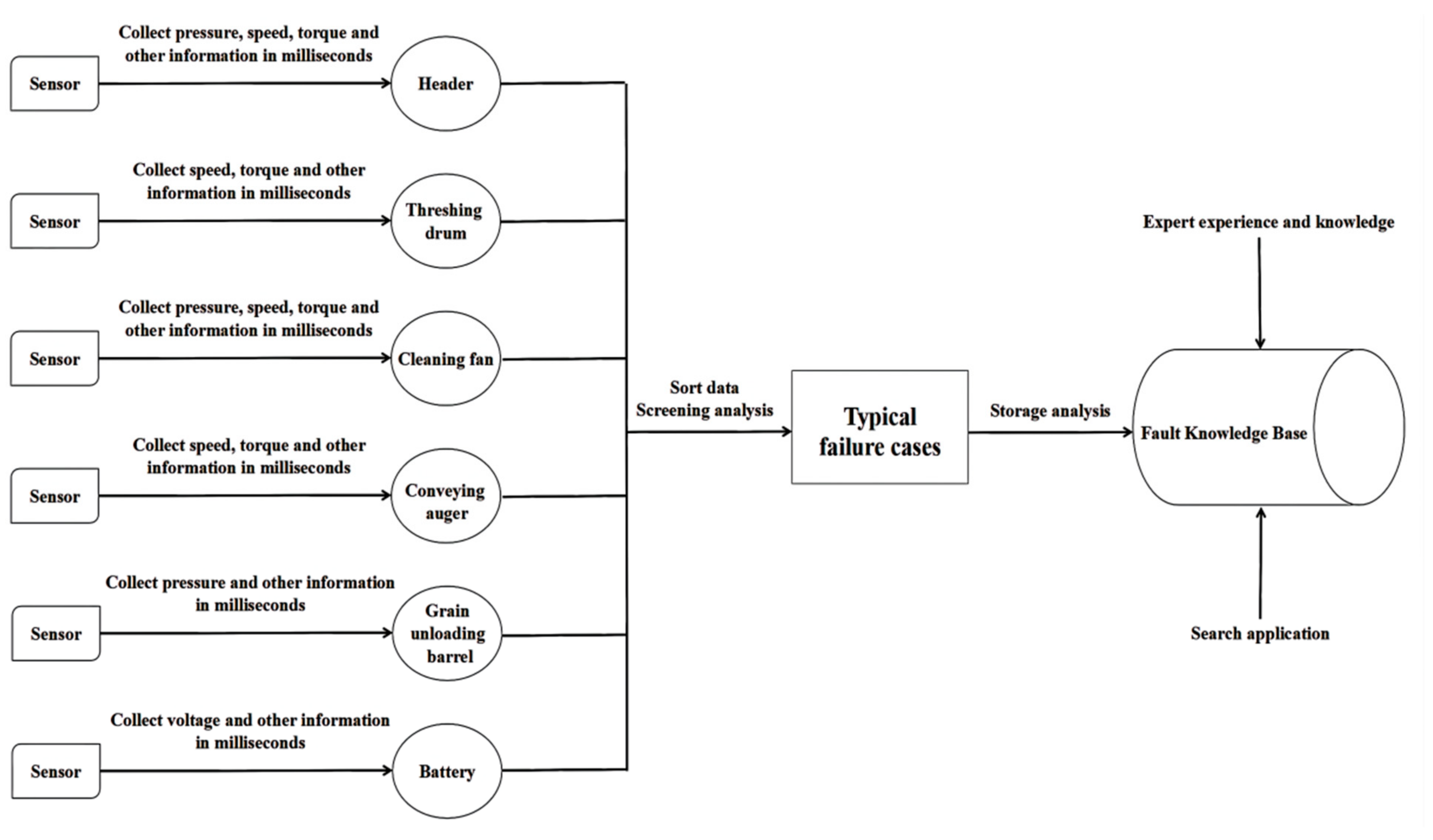
2.4.3. Fault Diagnosis
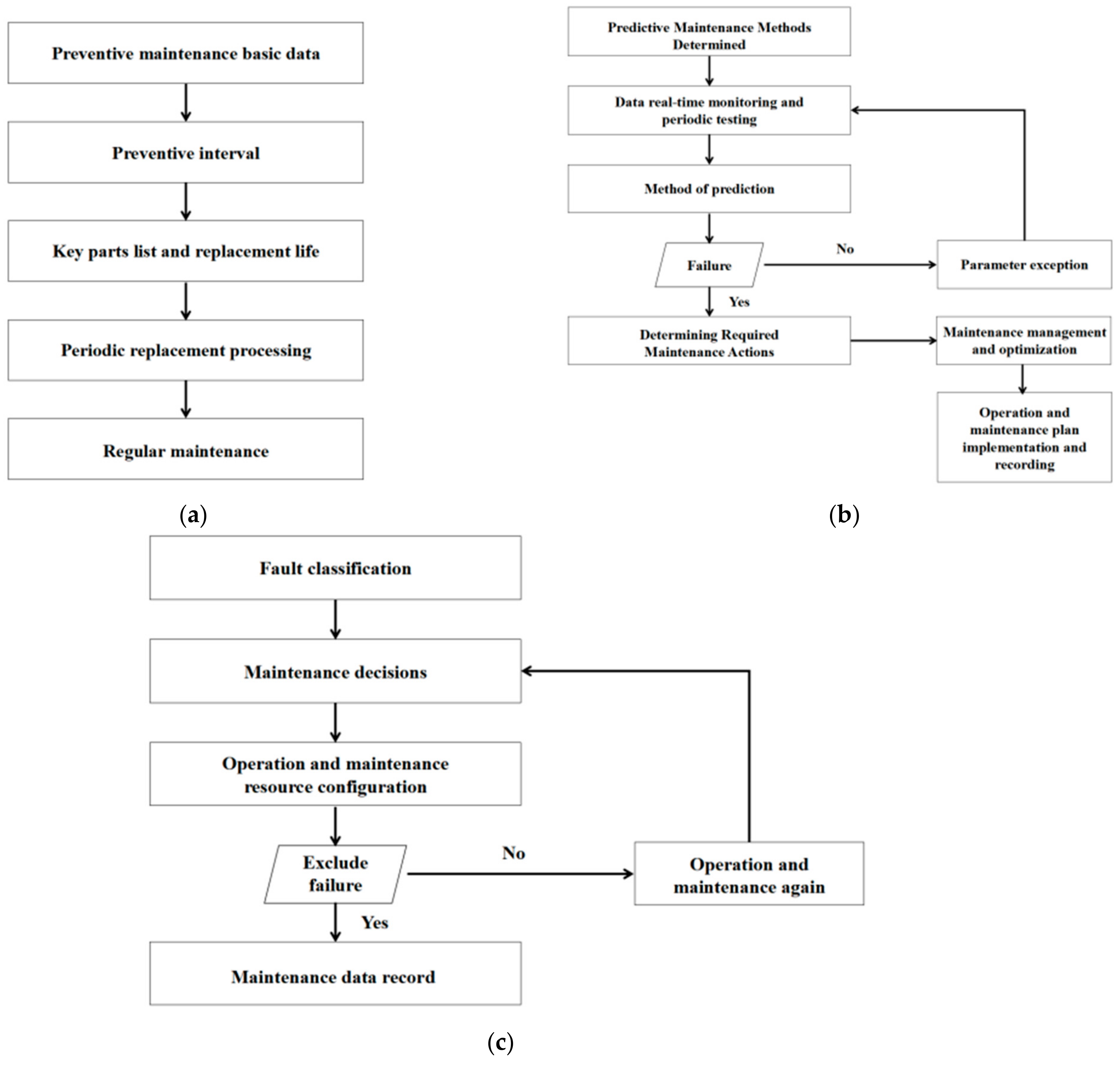
2.4.4. Comprehensive Operation Maintenance
2.5. Platform Test
2.5.1. Platform Stress Test
2.5.2. Platform Function Test
3. Results and Discussion
3.1. Platform Stress Test
3.2. Platform Function Test
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, H.B.; Yan, X.B.; Dai, Z.C.; Zhao, Y.K.; Du, P. Development Course and Trend of Combine Harvester in China. Tract. Farm Transp. 2021, 5, 10–12, (In Chinese with English abstract). [Google Scholar]
- Zhang, M.; Geng, A.J.; Zhang, Z.L.; Zhang, J. Research status and development trend of intelligence monitoring system for grain harvester. J. Chin. Agric. Mech. 2018, 9, 85–90, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Luo, X.W.; Liao, J.; Zou, X.J.; Zhang, Z.G.; Zhou, Z.Y.; Zang, Y.; Hu, L. Enhancing agricultural mechanization level through information technology. Trans. CSAE 2016, 20, 1–14, (In Chinese with English abstract). [Google Scholar]
- Chen, J.; Lv, S.J.; Li, Y.M.; Zheng, S.Y. Fault diagnosis of combine harvester based on PLC. Trans. Chin. Soc. Agric. Mach. 2011, 42, 112–116, 121, (In Chinese with English abstract). [Google Scholar]
- Yi, L.D. Research on Jam Fault Monitoring System for Combine Harvester; Jiangsu University: Zhenjiang, China, 2010; (In Chinese with English abstract). [Google Scholar]
- Yang, J.; Huang, Z.H.; Zhang, X.B.; Reardon, T. The rapid rise of cross-regional agricultural mechanization services in China. Am. J. Agric. Econ. 2013, 5, 1245–1251. [Google Scholar] [CrossRef]
- Hensh, S.; Tewari, V.K.; Upadhyay, G. A novel wireless instrumentation system for measurement of PTO (power take-off) torque requirement during rotary tillage. Biosyst. Eng. 2021, 212, 241–251. [Google Scholar] [CrossRef]
- Wang, L.F. Design and Development of Information Processing System in Harvester Based-on ARM; Harbin Institute of Technology: Shenzhen, China, 2013; (In Chinese with English abstract). [Google Scholar]
- Petre, L.M.; Heinz, D.K. Modeling and simulation of grain threshing and separation in threshing uints. Comput. Electron. Agric. 2008, 1, 96–104. [Google Scholar]
- Geert, C.; Wouter, S.; Bart, M.; Josse, D.B. A genetic input selection metho dology for identification of the cleaning procession a combine harvester. Biosyst. Eng. 2007, 1, 166–175. [Google Scholar]
- Jauyxb74. RDA Value Guide-Cross Implement. Available online: http://www.docin.com/p-1874367711.html (accessed on 22 March 2017).
- Kubba, A.E.; Jiang, K. Efficiency Enhancement of a Cantilever-Based Vibration Energy Harvester. Sensors 2014, 1, 188–211. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mohapatra, G.; Mishra, R.; Sahay, S.S. Integrated Computational Materials Engineering: Extending from Design to Supply Management. Trans. Indian Inst. Met. 2019, 72, 2187. [Google Scholar] [CrossRef]
- Coen, T.; Saeys, W.; Missotten, B.; Baerdenarker, D.J. Cruise control on a combine harvester using model-based predictive control. Biosyst. Eng. 2008, 1, 47–55. [Google Scholar] [CrossRef]
- Xia, L.Q.; Liang, X.X.; Wei, L.G.; Zhao, B. Research progress of automatic monitoring system for combine harvesters. Farm Mach. 2013, 19, 141–144, (In Chinese with English abstract). [Google Scholar]
- Baruah, D.C.; Paneaser, B.S. Energy requirement model for a combine harvester. Biosystern Eng. 2005, 1, 9–25. [Google Scholar] [CrossRef]
- Gao, F. Research on Monitoring Device of Main Working Parts of Combine Harvester; Zhejiang University: Hangzhou, China, 2012; (In Chinese with English abstract). [Google Scholar]
- He, L.P. Fault Diagnosis and Analysis of Hydraulic System of Combine Harvester; Jiangsu University: Zhenjiang, China, 2010; (In Chinese with English abstract). [Google Scholar]
- Nataraj, E.; Sarkar, P.; Raheman, H.; Upadhyay, G. Embedded digital display and warning system of velocity ratio and wheel slip for tractor operated active tillage implements. J. Terramechanics 2021, 97, 35–43. [Google Scholar] [CrossRef]
- Chen, J.; Yang, G.J.; Xu, K.; Chen, S. Design of remote monitoring system for combine harvester based on ARM. Electron. Sci. Technol. 2016, 131–135, 141, (In Chinese with English abstract). [Google Scholar]
- Chen, J.; Wang, X.L.; Wang, Y.F. Main components working condition monitoring system of union harvester based on Android mobile phone. Trans. Chin. Soc. Agric. Mach. 2016, S1, 203–207, (In Chinese with English abstract). [Google Scholar]
- Li, X.C.; Li, M.Z.; Wang, X.J.; Zheng, L.H.; Zhang, M.; Sun, M.Z.; Sun, H. Development and denoising test of grain combine with remote yield monitoring system. Trans. CSAE 2014, 2, 1–8, (In Chinese with English abstract). [Google Scholar]
- Ma, Z.Y.; Yu, C.S.; Yang, L.; Yang, G.Y. Remote operation data acquisition system of combine harvester based on LabVIEW. J. Chin. Agric. Mech. 2019, 2, 135–139, (In Chinese with English abstract). [Google Scholar]
- Chen, S. Research on Remote Video Surveillance and Fault Monitoring System of Combine Harvester; Jiangsu University: Zhenjiang, China, 2016; (In Chinese with English abstract). [Google Scholar]
- Li, B.; Liu, R.; Li, J.Q. Design of remote monitoring system for large agricultural machinery based on GPS/GPRS. Jiangsu Agric. Sci. 2014, 2, 349–352, (In Chinese with English abstract). [Google Scholar]
- Zhang, X.Y. Research on the Intelligent Terminal of the Remote Monitoring System of the Crawler Harvester. J. Agric. Mech. Res. 2017, 2, 176–180, (In Chinese with English abstract). [Google Scholar]
- Wang, H.P. Design and Realization of Agricultural Machinery Remote Supervision Service System Based on WebGIS; Capital Normal University: Beijing, China, 2014; (In Chinese with English abstract). [Google Scholar]
- Fu, W.Q. Research and demonstration of IoT technology for cluster operation and operation and maintenance services of modern agricultural machinery and equipment. China Sci. Technol. Achiev. 2016, 19, 22–23, (In Chinese with English abstract). [Google Scholar]
- Wei, H.C.; Tan, W.N. Symposium on Internet of Things Application of Modern Agricultural Machinery and Equipment Held. Agric. Mach. Qual. Superv. 2018, 2, 7, (In Chinese with English abstract). [Google Scholar]
- Agricultural mechanization cloud service platform. China Rural Sci. Technol. 2020, 4, 33–36, (In Chinese with English abstract).
- Cao, R.Y.; Li, S.C.; Wei, S.; Ji, Y.H.; Zhang, M.; Li, H. Remote Monitoring Platform for Multi-machine Cooperation Based on Web-GIS. Trans. Chin. Soc. Agric. Mach. 2017, 48 (Supp. 1), 52–57, (In Chinese with English abstract). [Google Scholar]
- Nie, G.J.; Li, Q.Z.; Hu, N.; Jiang, S.X.; Chen, B.Q. Fault Prediction of Combine-harvester Based on Hybrid Neural Network. Electron. Prod. Reliab. Environ. Test. 2021, 1, 57–62, (In Chinese with English abstract). [Google Scholar]
- Sha, E.H.M.; Jiang, W.W.; Dong, H.L.; Ma, Z.L.; Zhang, R.Y.; Chen, X.Z.; Zhuge, Q.F. Towards the design of emcient and consistent index structure with minimal write activities for Non-volatile memory. IEEE Trans. Comput. 2018, 3, 432–448. [Google Scholar] [CrossRef]
- Su, J. Research and Implementation of High Performance RPC Server Based on Netty; Nanjing University of Posts and Telecommunications: Nanjing, China, 2018; (In Chinese with English abstract). [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Sensor Monitoring Data | Fault Prediction | Fault Diagnosis | Comprehensive Operation Maintenance |
|---|---|---|---|---|
| Blockage of the header |  | Blockage of the header | Failure level: Critical failure Failure type: Blockage of the header Possible reason: ① The gap between the screw blade of the auger and the bottom plate of the header is too large, the blades cannot catch the cut crops, and the crops cannot be transported in time, which accumulates and blocks in front of the auger. ② When the blade edge is polished, it will reduce the efficiency of the push. | Maintenance mode: Failure repair Maintenance method: Repair Treatment measure: ① The gap between the helical blade and the header board should be adjusted correctly according to the density and height of the crops; when harvesting low crops, the gap can be adjusted smaller. ② Small teeth can be machined with a flat shovel or file to improve its grasping and pushing capabilities. |
| Breakage of the threshing drum transmission chain | 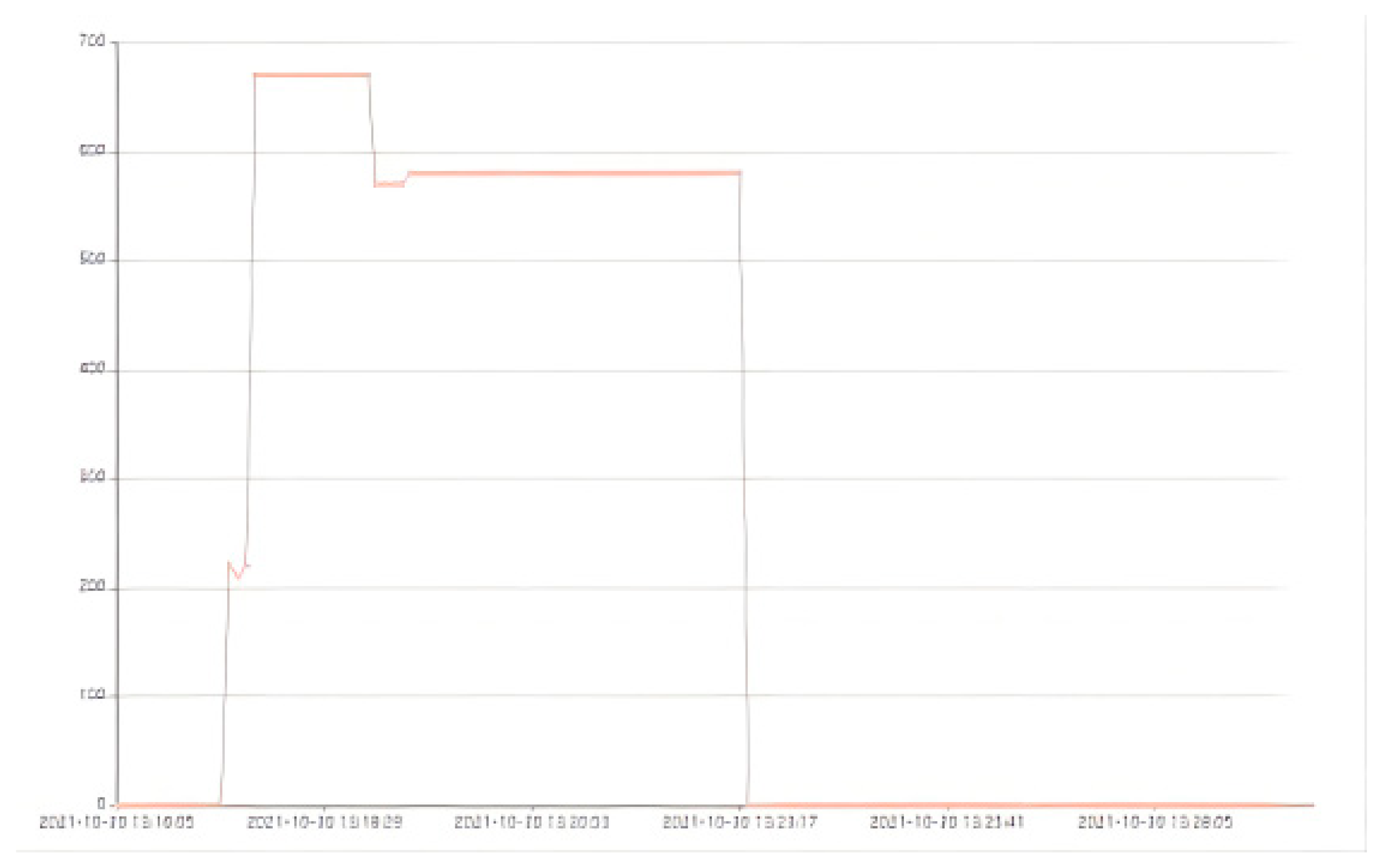 | ①Breakage of the threshing drum transmission chain; ②blockage of the threshing drum. | Failure level: Critical failure Failure type: Breakage of the threshing drum transmission chain Possible reason: ① When the sprockets in the transmission circuit are not in the same rotating hand, the chain is eccentrically worn or dropped. ② The drive shaft is bent, causing the sprocket to yaw. ③ Continue to use the chain after severe wear. ④ The tightness of the chain is not appropriate. ⑤ Sprocket wear exceeds the allowable limit. ⑥ The cotter pin of the sleeve roller chain is worn off, or the opening direction of the joint clip is reversed. | Maintenance mode: Predictive maintenance Maintenance method: Spare parts replacement Treatment measure: ① All sprockets in the same transmission circuit must be in the same rotation plane. ② Straighten the bent drive shaft so that the sprocket does not rotate more than the allowable swing. ③ Check the wear of the chain, repair and replace it in time. ④ Correctly adjust the tightness of the chain. ⑤ Repair and replace the sprocket exceeding the wear limit and adjust the safety clutch correctly. ⑥ Check the condition of the chain joint cotter pin and replace if necessary. |
| Damage to the battery |  | Damage to the battery | Failure level: Fatal failure Failure type: Damage to the battery Possible reason: Poor contact | Maintenance mode: Predictive maintenance Maintenance method: Repair Treatment measure: The generator should be repaired or replaced. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, S.; Yuan, Y.; Niu, K.; Zhou, L.; Zhao, B.; Wei, L.; Liu, L.; Liu, Y.; Pang, Z.; Wang, F.; et al. Design and Implementation of the Remote Operation and Maintenance Platform for the Combine Harvester. Appl. Sci. 2022, 12, 7637. https://doi.org/10.3390/app12157637
Bai S, Yuan Y, Niu K, Zhou L, Zhao B, Wei L, Liu L, Liu Y, Pang Z, Wang F, et al. Design and Implementation of the Remote Operation and Maintenance Platform for the Combine Harvester. Applied Sciences. 2022; 12(15):7637. https://doi.org/10.3390/app12157637
Chicago/Turabian StyleBai, Shenghe, Yanwei Yuan, Kang Niu, Liming Zhou, Bo Zhao, Liguo Wei, Lijing Liu, Yangchun Liu, Zaixi Pang, Fengzhu Wang, and et al. 2022. "Design and Implementation of the Remote Operation and Maintenance Platform for the Combine Harvester" Applied Sciences 12, no. 15: 7637. https://doi.org/10.3390/app12157637
APA StyleBai, S., Yuan, Y., Niu, K., Zhou, L., Zhao, B., Wei, L., Liu, L., Liu, Y., Pang, Z., Wang, F., Li, Z., & Zhang, W. (2022). Design and Implementation of the Remote Operation and Maintenance Platform for the Combine Harvester. Applied Sciences, 12(15), 7637. https://doi.org/10.3390/app12157637