
Numerical Study of Rock Damage Mechanism Induced by Blasting Excavation Using Finite Discrete Element Method



Abstract
:1. Introduction
2. Fundamental of FDEM
2.1. Basic Equation
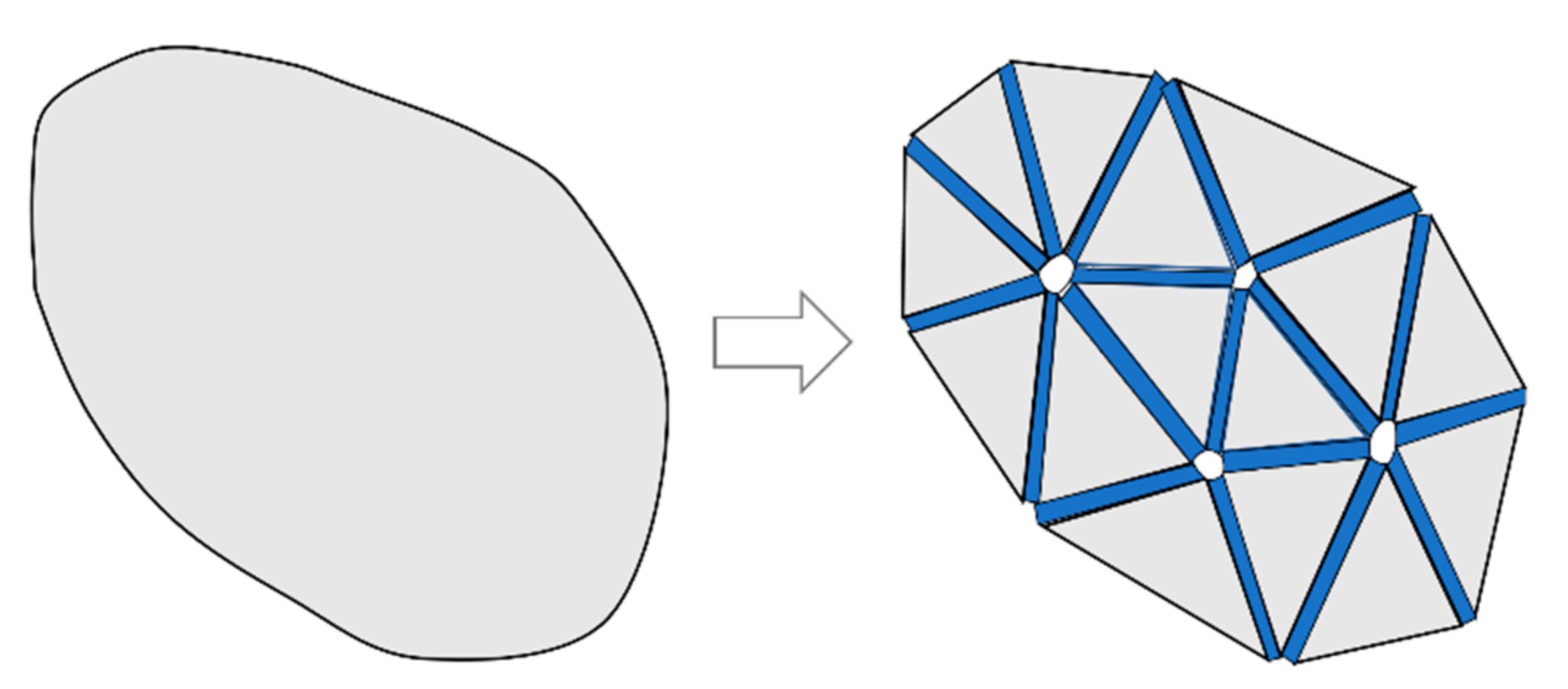
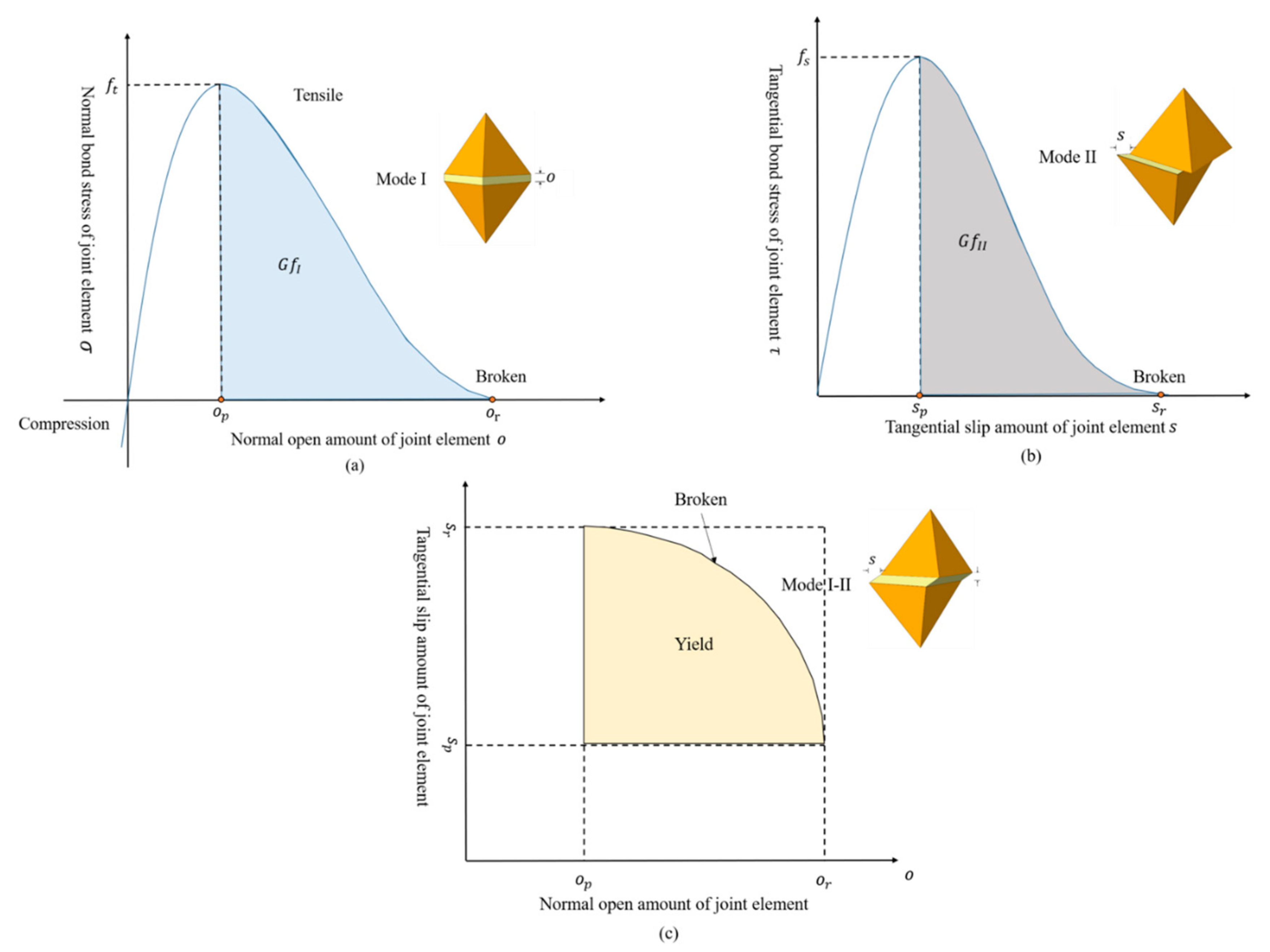
2.2. Fracture Constitutive Model for the Joint Element

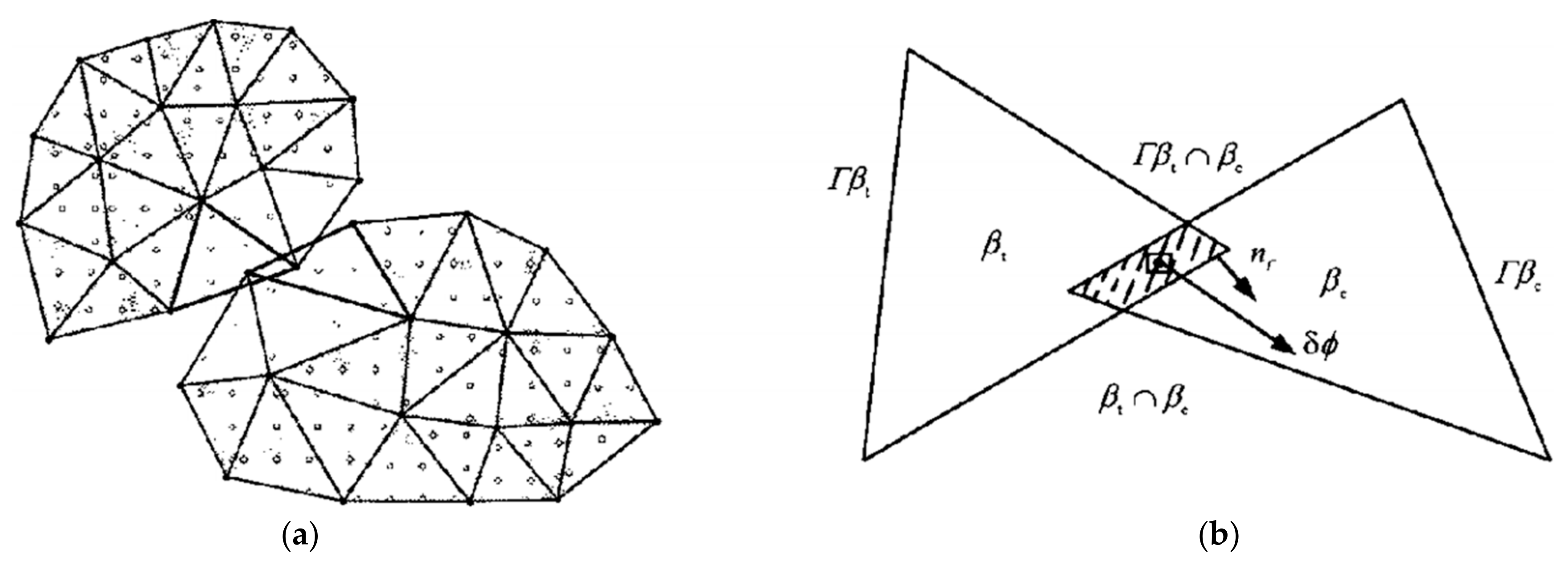
2.3. Contact Model for Triangular Element
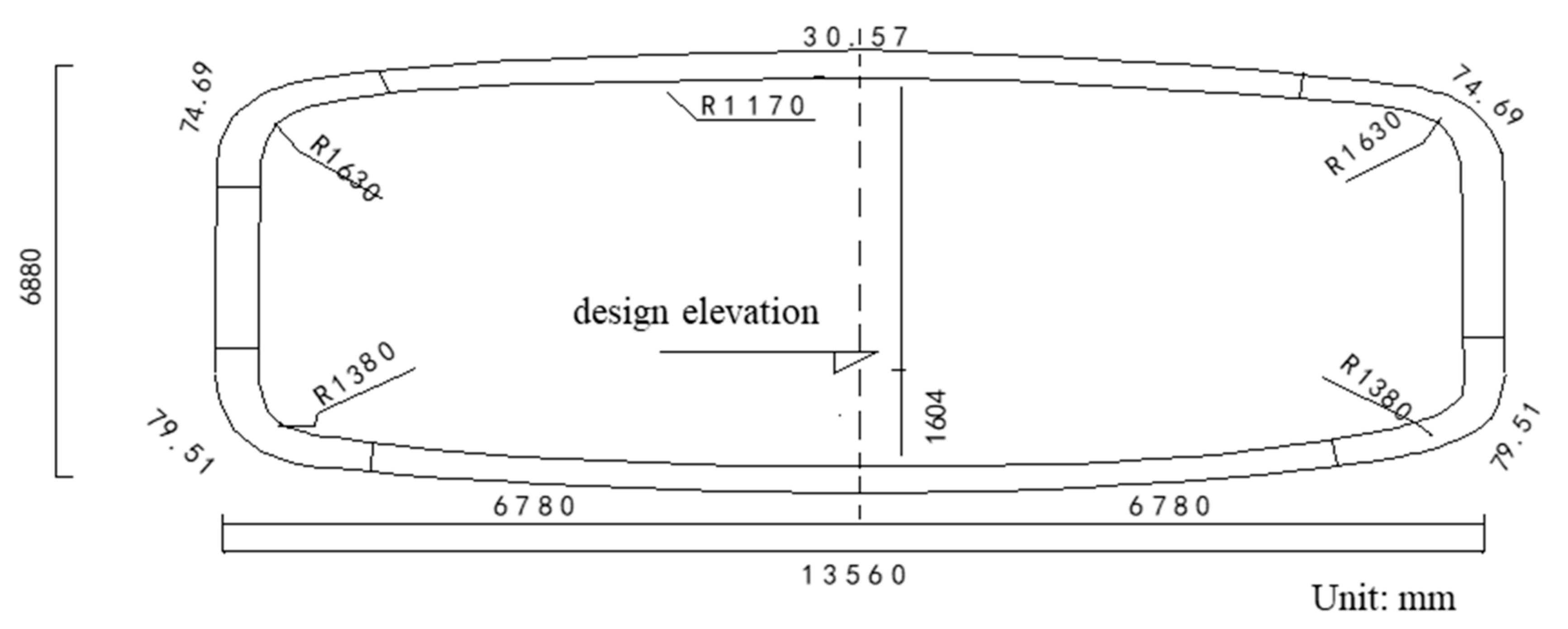
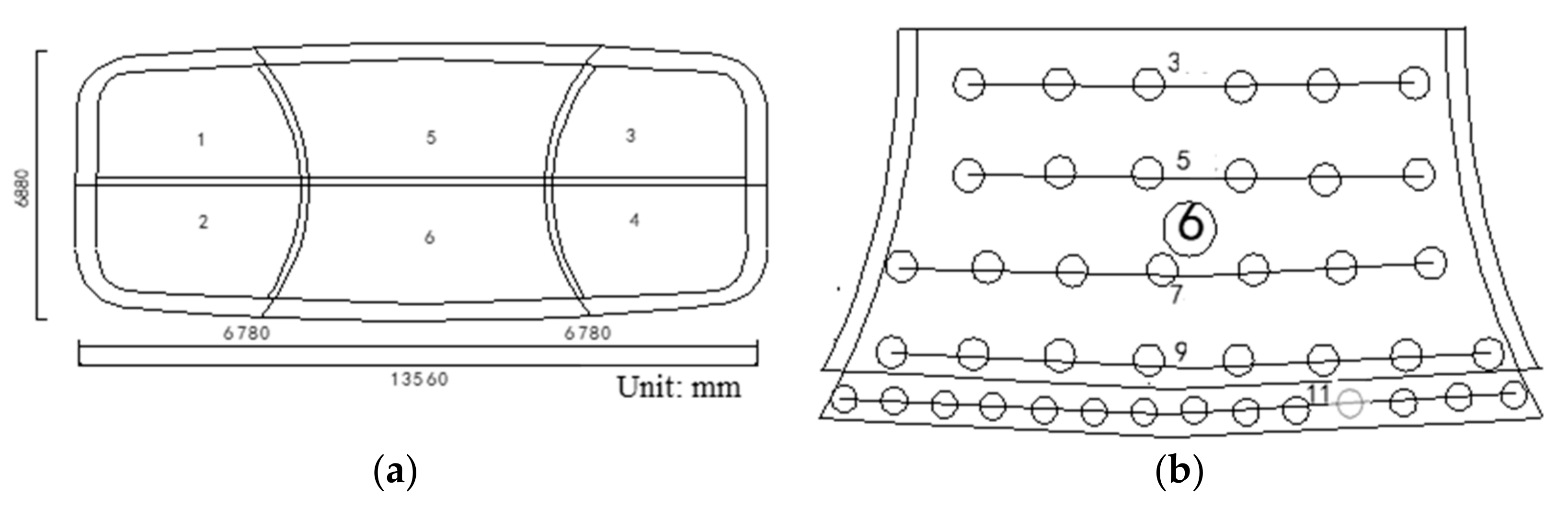
3. Engineering Background
4. Millisecond Delay Determination
5. Various Blasting Excavation Construction Technologies
6. Conclusions
- (1)
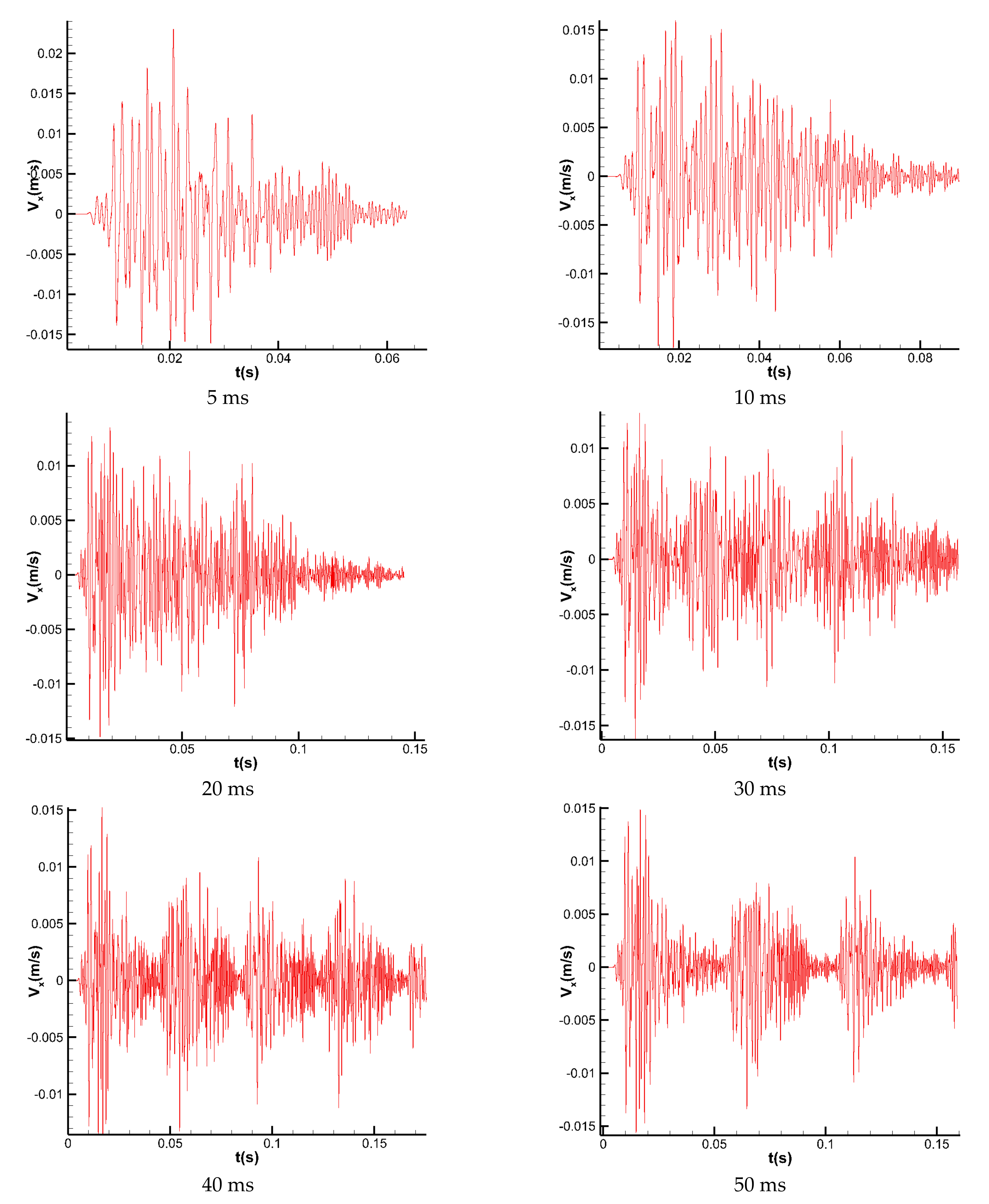
- The influence of the millisecond delay on the peak blasting vibration velocity is not a single positive correlation or negative correlation, but when the millisecond delay is greater than 40 ms, the delay time no longer affects the peak blasting vibration velocity. When the millisecond delay is 20–30 ms, the peak blasting vibration velocity is the smallest, and it meets the requirements of the project that the blasting vibration velocity is less than 2 cm/s.
- (2)
- Through the numerical simulation on the near-field surrounding rock fracture of the drainage channel project from Guanggu 1st Road to Gaoxin 4th Road, the optimal blasting excavation construction technology of grade III surrounding rock is the double side drift method. It has a better control effect on the deformation and crushing of the surrounding rock of the tunnel.
- (3)
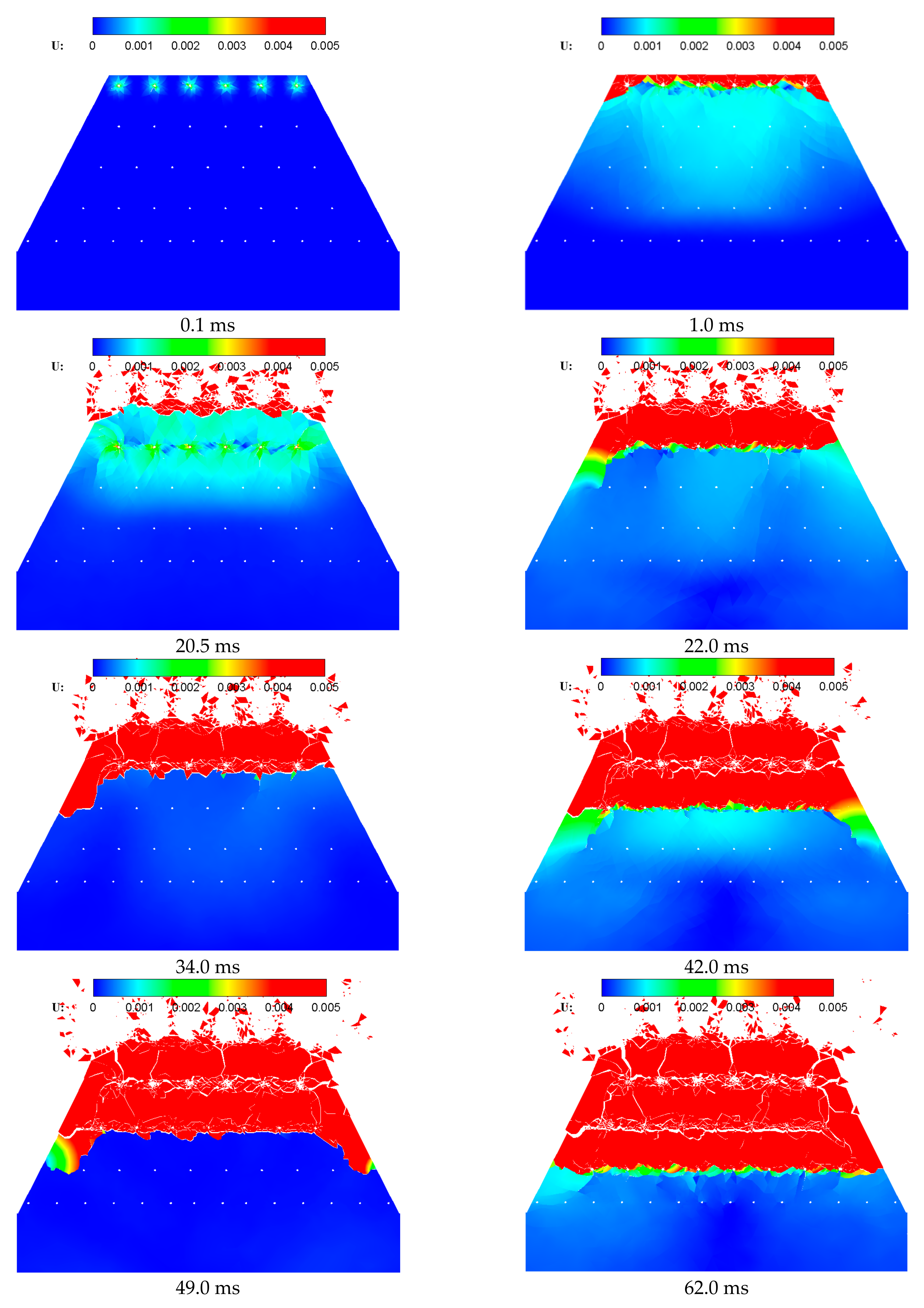
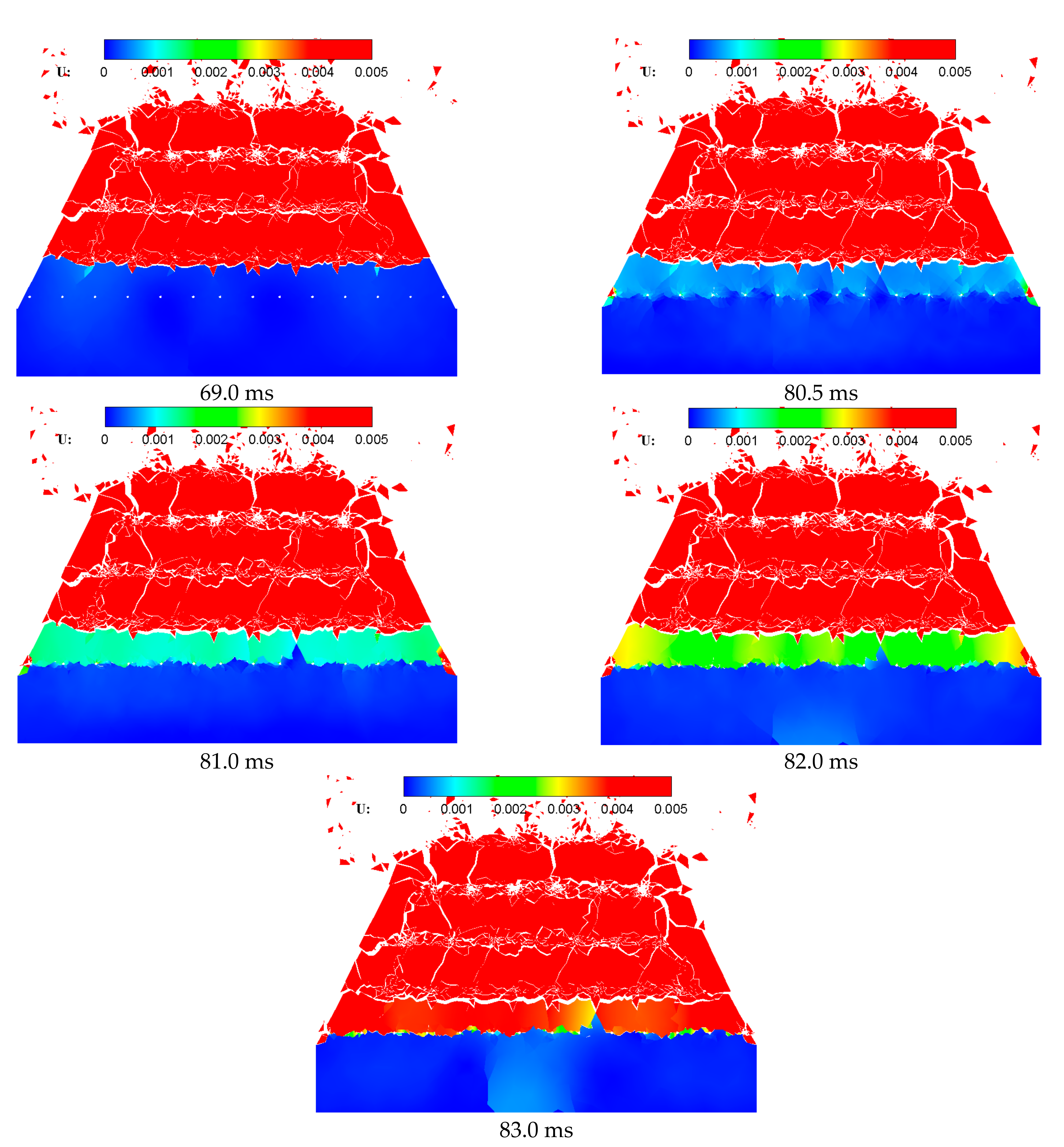
- Not only can the MultiFracS software simulate the whole process of a complex fracture, fragmentation, and movement of rock and soil during blasting and excavation, but it can provide information on the evolution of the displacement field and stress field in the process of blasting, which provides a powerful simulation tool for blasting and excavation engineering.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ramulu, M.; Chakraborty, A.K.; Sitharam, T.G. Damage assessment of basaltic rock mass due to repeated blasting in a railway tunnelling project—A case study. Tunn. Undergr. Space Technol. 2009, 24, 208–221. [Google Scholar] [CrossRef]
- Kim, E.; Stine, M.A.; de Oliveira, D.B.M. Effects of water content and loading rate on the mechanical properties of Berea Sandstone. J. South. Afr. Inst. Min. Metall. 2019, 119, 1077–1082. [Google Scholar] [CrossRef]
- Singh, R.K.; Sawmliana, C.; Hembram, P. Damage threat to sensitive structures of a thermal power plant from hard rock blasting operations in track hopper area: A case study. Int. J. Prot. Struct. 2020, 11, 3–22. [Google Scholar] [CrossRef]
- Villaescusa, E.; Neindorf, L.B. Damage to stope walls from underground blasting. In Proceedings of the 6th International Conference on Structures under Shock and Impact (SUSI VI), Cambridge, UK, 3–5 July 2000; pp. 129–140. [Google Scholar]
- Tao, M.; Li, X.; Wu, C. 3D numerical model for dynamic loading-induced multiple fracture zones around underground cavity faces. Comput. Geotech. 2013, 54, 33–45. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Song, S.; Tan, Y.; Fan, D.; Ning, J.; Li, X.; Yin, Y. Similar simulation study on the deformation and failure of surrounding rock of a large section chamber group under dynamic loading. Int. J. Min. Sci. Technol. 2021, 31, 495–505. [Google Scholar] [CrossRef]
- Saiang, D.; Nordlund, E. Numerical Analyses of the Influence of Blast-Induced Damaged Rock Around Shallow Tunnels in Brittle Rock. Rock Mech. Rock Eng. 2008, 42, 421–448. [Google Scholar] [CrossRef]
- Li, X.; Cao, W.; Zhou, Z.; Zou, Y. Influence of stress path on excavation unloading response. Tunn. Undergr. Space Technol. 2014, 42, 237–246. [Google Scholar] [CrossRef]
- Yang, J.H.; Yao, C.; Jiang, Q.H.; Lu, W.B.; Jiang, S.H. 2D numerical analysis of rock damage induced by dynamic in-situ stress redistribution and blast loading in underground blasting excavation. Tunn. Undergr. Space Technol. 2017, 70, 221–232. [Google Scholar] [CrossRef]
- Xie, L.X.; Lu, W.B.; Zhang, Q.B.; Jiang, Q.H.; Wang, G.H.; Zhao, J. Damage evolution mechanisms of rock in deep tunnels induced by cut blasting. Tunn. Undergr. Space Technol. 2016, 58, 257–270. [Google Scholar] [CrossRef]
- Munjiza, A.; Andrews, K.; White, J.K. Combined single and smeared crack model in combined finite-discrete element analysis. Int. J. Numer. Methods Eng. 1999, 44, 41–57. [Google Scholar] [CrossRef]
- Munjiza, A.A. The Combined Finite-Discrete Element Method; John Wiley & Sons: Chichester, UK, 2004. [Google Scholar]
- Lisjak, A.; Figi, D.; Grasselli, G. Fracture development around deep underground excavations: Insights from FDEM modelling. J. Rock Mech. Geotech. Eng. 2014, 6, 493–505. [Google Scholar] [CrossRef] [Green Version]
- Lisjak, A.; Garitte, B.; Grasselli, G.; Müller, H.R.; Vietor, T. The excavation of a circular tunnel in a bedded argillaceous rock (Opalinus Clay): Short-term rock mass response and FDEM numerical analysis. Tunn. Undergr. Space Technol. 2015, 45, 227–248. [Google Scholar] [CrossRef] [Green Version]
- Ma, G.; Zhang, Y.; Zhou, W.; Ng, T.-T.; Wang, Q.; Chen, X. The effect of different fracture mechanisms on impact fragmentation of brittle heterogeneous solid. Int. J. Impact Eng. 2018, 113, 132–143. [Google Scholar] [CrossRef]
- Ma, G.; Zhou, W.; Regueiro, R.A.; Wang, Q.; Chang, X. Modeling the fragmentation of rock grains using computed tomography and combined FDEM. Powder Technol. 2017, 308, 388–397. [Google Scholar] [CrossRef]
- Rougier, E.; Knight, E.E.; Broome, S.T.; Sussman, A.J.; Munjiza, A. Validation of a three-dimensional Finite-Discrete Element Method using experimental results of the Split Hopkinson Pressure Bar test. Int. J. Rock Mech. Min. Sci. 2014, 70, 101–108. [Google Scholar] [CrossRef]
- Fukuda, D.; Mohammadnejad, M.; Liu, H.; Dehkhoda, S.; Chan, A.; Cho, S.H.; Min, G.J.; Han, H.; Kodama, J.i.; Fujii, Y. Development of a GPGPU-parallelized hybrid finite-discrete element method for modeling rock fracture. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 1797–1824. [Google Scholar] [CrossRef]
- Hamdi, P.; Stead, D.; Elmo, D. Damage characterization during laboratory strength testing: A 3D-finite-discrete element approach. Comput. Geotech. 2014, 60, 33–46. [Google Scholar] [CrossRef]
- Yan, C.Z.; Zheng, H. A new potential function for the calculation of contact forces in the combined finite-discrete element method. Int. J. Numer. Anal. Methods Geomech. 2017, 41, 265–283. [Google Scholar] [CrossRef]
- Yan, C.; Fan, H.; Huang, D.; Wang, G. A 2D mixed fracture–pore seepage model and hydromechanical coupling for fractured porous media. Acta Geotech. 2021, 16, 3061–3086. [Google Scholar] [CrossRef]
- Yan, C.; Jiao, Y.-Y. A 2D fully coupled hydro-mechanical finite-discrete element model with real pore seepage for simulating the deformation and fracture of porous medium driven by fluid. Comput. Struct. 2018, 196, 311–326. [Google Scholar] [CrossRef]
- Yan, C.; Zheng, H. Three-Dimensional Hydromechanical Model of Hydraulic Fracturing with Arbitrarily Discrete Fracture Networks using Finite-Discrete Element Method. Int. J. Geomech. 2017, 17, 6. [Google Scholar] [CrossRef]
- Yan, C.; Gao, Y.; Guo, H. A FDEM based 3D discrete mixed seepage model for simulating fluid driven fracturing. Eng. Anal. Bound. Elem. 2022, 140, 447–463. [Google Scholar] [CrossRef]
- Yan, C.; Guo, H.; Tang, Z. Three-dimensional continuous-discrete pore-fracture mixed seepage model and hydro-mechanical coupling model to simulate hydraulic fracturing. J. Pet. Sci. Eng. 2022, 215, 110510. [Google Scholar] [CrossRef]
- Yan, C.; Jiao, Y.-Y.; Zheng, H. A fully coupled three-dimensional hydro-mechanical finite discrete element approach with real porous seepage for simulating 3D hydraulic fracturing. Comput. Geotech. 2018, 96, 73–89. [Google Scholar] [CrossRef]
- Yan, C.; Tong, Y.; Luo, Z.; Ke, W.; Wang, G. A two-dimensional grouting model considering hydromechanical coupling and fracturing for fractured rock mass. Eng. Anal. Bound. Elem. 2021, 133, 385–397. [Google Scholar] [CrossRef]
- Yan, C.; Zheng, Y.; Ke, W.; Wang, G. A FDEM 3D moisture migration-fracture model for simulation of soil shrinkage and desiccation cracking. Comput. Geotech. 2021, 140, 104425. [Google Scholar] [CrossRef]
- Yan, C.; Wei, D.; Wang, G. Three-dimensional finite discrete element-based contact heat transfer model considering thermal cracking in continuous–discontinuous media. Comput. Methods Appl. Mech. Eng. 2022, 388, 114228. [Google Scholar] [CrossRef]
- Yan, C.; Zheng, Y.; Huang, D.; Wang, G. A coupled contact heat transfer and thermal cracking model for discontinuous and granular media. Comput. Methods Appl. Mech. Eng. 2021, 375, 113587. [Google Scholar] [CrossRef]
- Yan, C.; Yang, Y.; Wang, G. A new 2D continuous-discontinuous heat conduction model for modeling heat transfer and thermal cracking in quasi-brittle materials. Comput. Geotech. 2021, 137, 104231. [Google Scholar] [CrossRef]
- Yan, C.; Jiao, Y.-Y. A 2D discrete heat transfer model considering the thermal resistance effect of fractures for simulating the thermal cracking of brittle materials. Acta Geotech. 2019, 15, 1303–1319. [Google Scholar] [CrossRef]
- Yan, C.; Wang, X.; Huang, D.; Wang, G. A new 3D continuous-discontinuous heat conduction model and coupled thermomechanical model for simulating the thermal cracking of brittle materials. Int. J. Solids Struct. 2021, 229, 111123. [Google Scholar] [CrossRef]
- Yan, C.; Zheng, H. A coupled thermo-mechanical model based on the combined finite-discrete element method for simulating thermal cracking of rock. Int. J. Rock Mech. Min. Sci. 2017, 91, 170–178. [Google Scholar] [CrossRef]
- Yan, C.; Fan, H.; Zheng, Y.; Zhao, Y.; Ning, F. Simulation of the thermal shock of brittle materials using the finite-discrete element method. Eng. Anal. Bound. Elem. 2020, 115, 142–155. [Google Scholar] [CrossRef]
- Yan, C.; Xie, X.; Ren, Y.; Ke, W.; Wang, G. A FDEM-based 2D coupled thermal-hydro-mechanical model for multiphysical simulation of rock fracturing. Int. J. Rock Mech. Min. Sci. 2022, 149, 104964. [Google Scholar] [CrossRef]
- Yan, C.; Jiao, Y.Y. FDEM-TH3D: A three-dimensional coupled hydrothermal model for fractured rock. Int. J. Numer. Anal. Methods Geomech. 2018, 43, 415–440. [Google Scholar] [CrossRef] [Green Version]
- Yan, C.; Luo, Z.; Zheng, Y.; Ke, W. A 2D discrete moisture diffusion model for simulating desiccation fracturing of soil. Eng. Anal. Bound. Elem. 2022, 138, 42–64. [Google Scholar] [CrossRef]
- Yan, C.; Wang, T.; Ke, W.; Wang, G. A 2D FDEM-based moisture diffusion–fracture coupling model for simulating soil desiccation cracking. Acta Geotech. 2021, 16, 2609–2628. [Google Scholar] [CrossRef]
- Wang, T.; Yan, C.; Wang, G.; Zheng, Y.; Ke, W.; Jiao, Y.-Y. Numerical study on the deformation and failure of soft rock roadway induced by humidity diffusion. Tunn. Undergr. Space Technol. 2022, 126, 104565. [Google Scholar] [CrossRef]
- Wang, T.; Yan, C.; Zheng, Y.; Jiao, Y.-Y.; Zou, J.J.C. Geotechnics. Numerical study on the effect of meso-structure on hydraulic conductivity of soil-rock mixtures. Comput. Geotech. 2022, 146, 104726. [Google Scholar] [CrossRef]
- Munjiza, A.; Andrews, K.R.F. NBS contact detection algorithm for bodies of similar size. Int. J. Numer. Methods Eng. 1998, 43, 131–149. [Google Scholar] [CrossRef]
- Guo, L.; Xiang, J.; Latham, J.-P.; Izzuddin, B. A numerical investigation of mesh sensitivity for a new three-dimensional fracture model within the combined finite-discrete element method. Eng. Fract. Mech. 2016, 151, 70–91. [Google Scholar] [CrossRef] [Green Version]
- Duvall, W.I.J.G. Strain-wave shapes in rock near explosions. Geophysics 1953, 18, 310–323. [Google Scholar] [CrossRef]
- Henrych, J.; Abrahamson, G.R. The dynamics of explosion and its use. J. Appl. Mech. 1980, 47, 218. [Google Scholar] [CrossRef]
- Han, H.; Fukuda, D.; Liu, H.; Fathi Salmi, E.; Sellers, E.; Liu, T.; Chan, A. FDEM simulation of rock damage evolution induced by contour blasting in the bench of tunnel at deep depth. Tunn. Undergr. Space Technol. 2020, 103, 103495. [Google Scholar] [CrossRef]
- Olsson, M.; Niklasson, B.; Wilson, L.; Andersson, C.; Christiansson, R. Äspö HRL. Experiences of Blasting of the TASQ Tunnel; Swedish Nuclear Fuel and Waste Management Co.: Stockholm, Sweden, 2004. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Triangular element | |
| (kg/m3) | 2300 |
| Elastic Modulus E (GPa) | 20 |
| Friction angle (°) | 30 |
| (GPa) | 2000 |
| (GPa/m) | 2000 |
| 0.25 | |
| Joint element | |
| (MPa) | 1.5 |
| (MPa) | 14 |
| (°) | 30 |
| (J/m2) | 30,000 |
| (J/m2) | 100,000 |
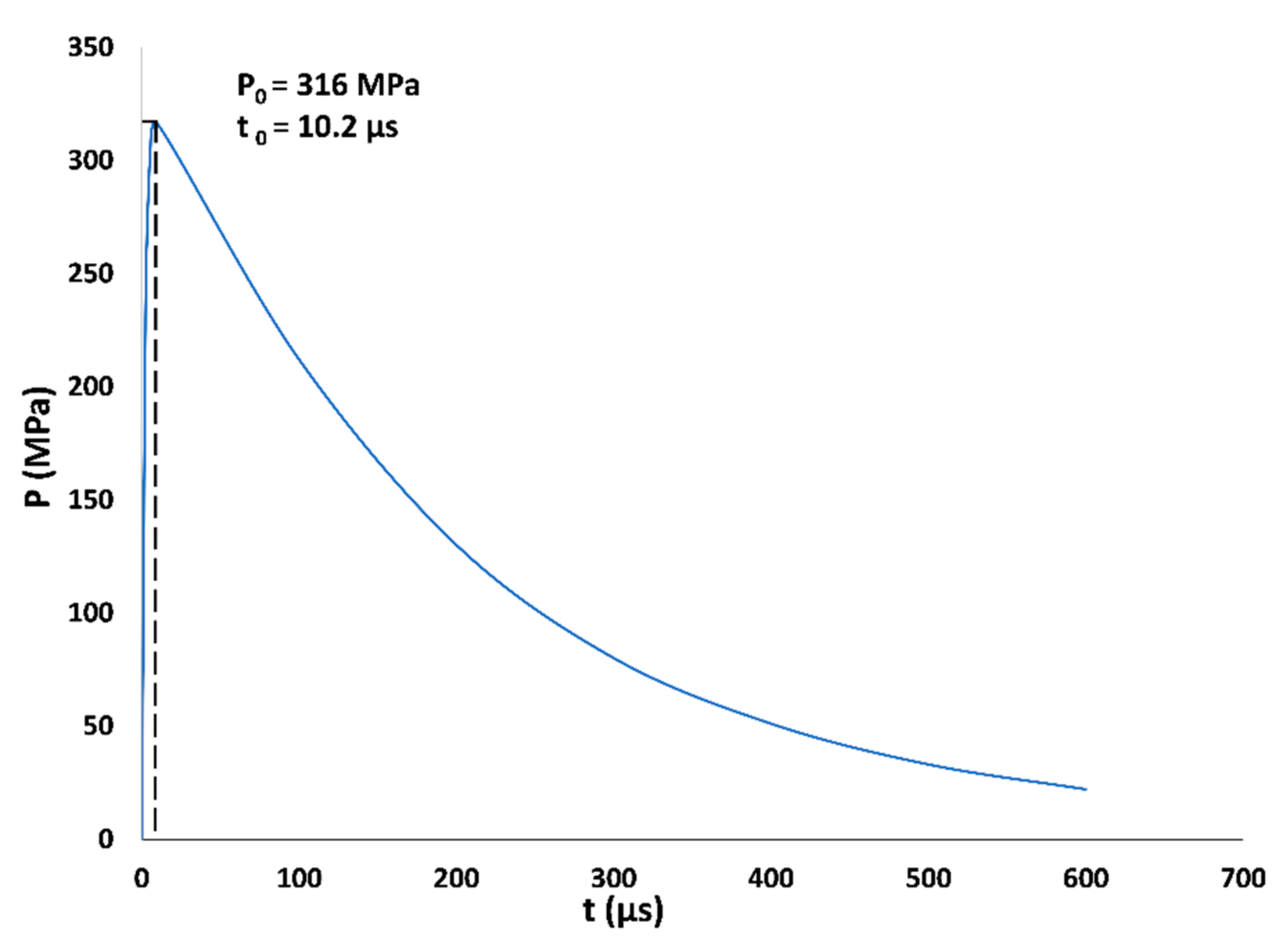
| Blasting load peak (surrounding holes/other holes) MPa | 104/316 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, W.; Wang, X.; Yan, C.; Qiao, C. Numerical Study of Rock Damage Mechanism Induced by Blasting Excavation Using Finite Discrete Element Method. Appl. Sci. 2022, 12, 7517. https://doi.org/10.3390/app12157517
Ke W, Wang X, Yan C, Qiao C. Numerical Study of Rock Damage Mechanism Induced by Blasting Excavation Using Finite Discrete Element Method. Applied Sciences. 2022; 12(15):7517. https://doi.org/10.3390/app12157517
Chicago/Turabian StyleKe, Wenhui, Xun Wang, Chengzeng Yan, and Chuyin Qiao. 2022. "Numerical Study of Rock Damage Mechanism Induced by Blasting Excavation Using Finite Discrete Element Method" Applied Sciences 12, no. 15: 7517. https://doi.org/10.3390/app12157517
APA StyleKe, W., Wang, X., Yan, C., & Qiao, C. (2022). Numerical Study of Rock Damage Mechanism Induced by Blasting Excavation Using Finite Discrete Element Method. Applied Sciences, 12(15), 7517. https://doi.org/10.3390/app12157517