For complex systems, the calculation cost is very high in the case of many parameters to be optimized and objective functions (dimension disaster). This paper proposes a multi-objective optimization method based on the Kriging surrogate model [
15,
16,
17] for an optical imaging system; for a specific system, it greatly reduces the calculation cost in the optimization process and helps to conduct a more comprehensive search in the global design space. This surrogate model has a large number of applications in aerodynamics [
18], weather prediction [
19], and the structural reliability [
20] of aircraft. Compared with the conventional methods, which mainly rely on optical system simulation using ray-tracing-based programs, the surrogate model-based method can greatly reduce the calculation cost and provide a possibility of using the saved computer power for more comprehensive searches in the design space.
1.1. Overview of Optical Imaging System Design
The optical imaging system usually consists of a series of well-designed sequential lenses with constraints in manufacturing, physical size, tolerances, and cost. The excellent performance of the system is typically realized through a careful iterative process, including the definition of performance objectives and optical constraints, construction and minimization of an appropriate merit function comprising these objectives, and constraints to realize the optimum design of the optical system, and then a prediction of the realized performance with a tolerance analysis of the design [
21]. The aim of the optimum design of the optical lens under several physical and system constraints is to obtain a series of optimal lens variables with a satisfactory optical performance, such as a low aberration. Optimal variables in lens design include targets of the lens, such as element material, surface curvatures, surface aspherical coefficients, element thicknesses, and spacings.
A merit function in the optical design procedure is defined as the measure of optical quality, typically with zero indicating “perfection” of the optical system. The value of the merit function is calculated through the process of ray tracing and optical analyses in an optical system. Computers became widely used in optical design because of the high computational complexity of ray tracing [
22,
23]. However, the guidance and intervention of competent users is critical in achieving an optimized and well-balanced design solution; even modern high-speed computers with extreme processing power can be applied in the design process [
24].
With high-order aspherical surfaces or more optimization variables implemented in modern lens designs processes, the optimization process is becoming further sophisticated with new techniques, such as integrating manufacturing tolerances into optimization in order to achieve minimal performance degradation with as-built lenses [
25,
26] or incorporating computational photography steps into the lens design stage [
27,
28,
29]. In general, optimization algorithms applied to optical systems can be divided into classical gradient-based optimization algorithms based on the least-squares (LS) method [
30,
31,
32,
33,
34,
35] and modern optimization algorithms based on the analogy with natural evolution.
The application of the classical LS method in the optimization of optical systems was first proposed by Rosen and Eldert [
30]; since then, a considerable number of researchers have applied or modified this method in different fields. The appealing reason for the application of the LS method in the merit function is the preservation of the information relating to the distribution of the various aberrations. Kidger [
36] defined a value, referred to as a step length, with the target of controlling and limiting the changes of the constructional parameters in the optical system, and formed the damped least-squares (DLS) method. After that, numerous methods, including altering the additive damping in the DLS into multiplicative damping [
31], were proposed to improve the convergence of the DLS. Except for the LS methods, Spencer [
37] has specified that computers could only be regarded as a tool capable of offering optical designers temporary solutions because qualitative judgments and compromises were required in the optimization of optical systems. A novel concept of aberrations brought up by David S. Grey [
38,
39] is prominent, and this is principally due to the practical realization of his computer program, where a novel orthonormal theory of aberrations was applied in the optimization of optical systems. Moreover, the orthonormalization in this theory was improved through the Gram–Schmidt transformation proposed by Pegis et al. [
40]. The fundamental ideas forming the concept of simulated annealing originated from Metropolis et al. [
41] and were suggested by Gelatt et al. [
42] to be used as an optimization method in various systems, such as optical. Glatzel’s adaptive optimization method, described by Glatzel and Wilson [
43] and Rayces [
44], is the first optimization method where the number of aberrations is smaller than that of variable constructional parameters.
Modern evolutionary optimization algorithms primarily comprise genetic algorithms (GAs) and evolution strategies (ESs). GAs can be applied to solve complicated search and optimization problems with the implementation of adaptive methods, which are mainly based on a simplified genetic processes simulation [
45,
46,
47]. The simple genetic algorithm (SGA) proposed by Goldberg [
48] only consists of the most fundamental elements that every genetic algorithm must have. These elements include the individual population, the individual’s merit function selection, the crossover to create a new progeny, and the arbitrary mutation of a new progeny. The adaptive steady-state genetic algorithm used for the construction of the genetic algorithm for the optimization of optical systems was defined by Davis [
49], and each genetic algorithm consists of three modules: the evaluation module, the population module, and the reproduction module. Evolution strategies (ESs) were developed by Schwefel [
50] with the target of solving parameter optimization problems and mainly consist of the two-membered evolution strategy and the multimembered evolution strategy algorithms that mimic the natural selection principle.
One of the most essential differences between classical and modern optimization algorithms is the optimum searched by these approaches; the classical optimization algorithms can only search for local optimal results, while the modern algorithms attempt to search for the global optimum. The theory behind the optimum difference is that the classical optimization algorithms do not allow for the deterioration of the merit function, so they cannot escape the first local optimum they find. As for the evolutionary algorithms, even though they cannot find the global optimum all the time, they can find adequately good results close to the global optimum [
51].
In addition to the above-mentioned approaches, the study of applying machine learning based on deep neural networks (DNNs) [
4,
52,
53,
54,
55] in optical system design became prominent in recent years. Yang et al. [
52] demonstrated that the approach of neural network-based deep learning can immediately generate a good starting point in freeform reflective imaging systems. Hegde [
4] has proven that the combination of applying DNN as a surrogate model and optical optimization can improve the efficiency of optimization, with a 90% decrease in evaluated function budget compared with optimization without a surrogate model. After that, Hegde [
53] extended his work into the field of deep convolutional neural networks (CNNs) and proved that the trained networks can reach a much faster convergence in solving inverse scattering global optimization problems.
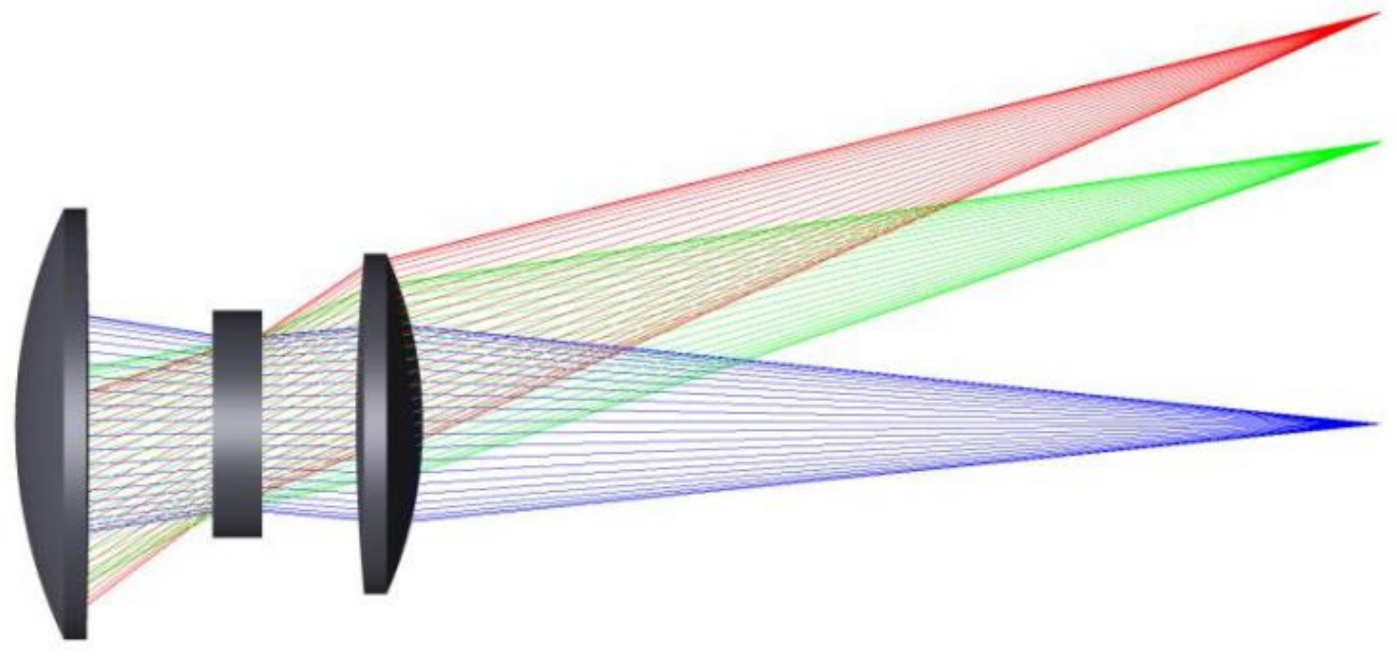
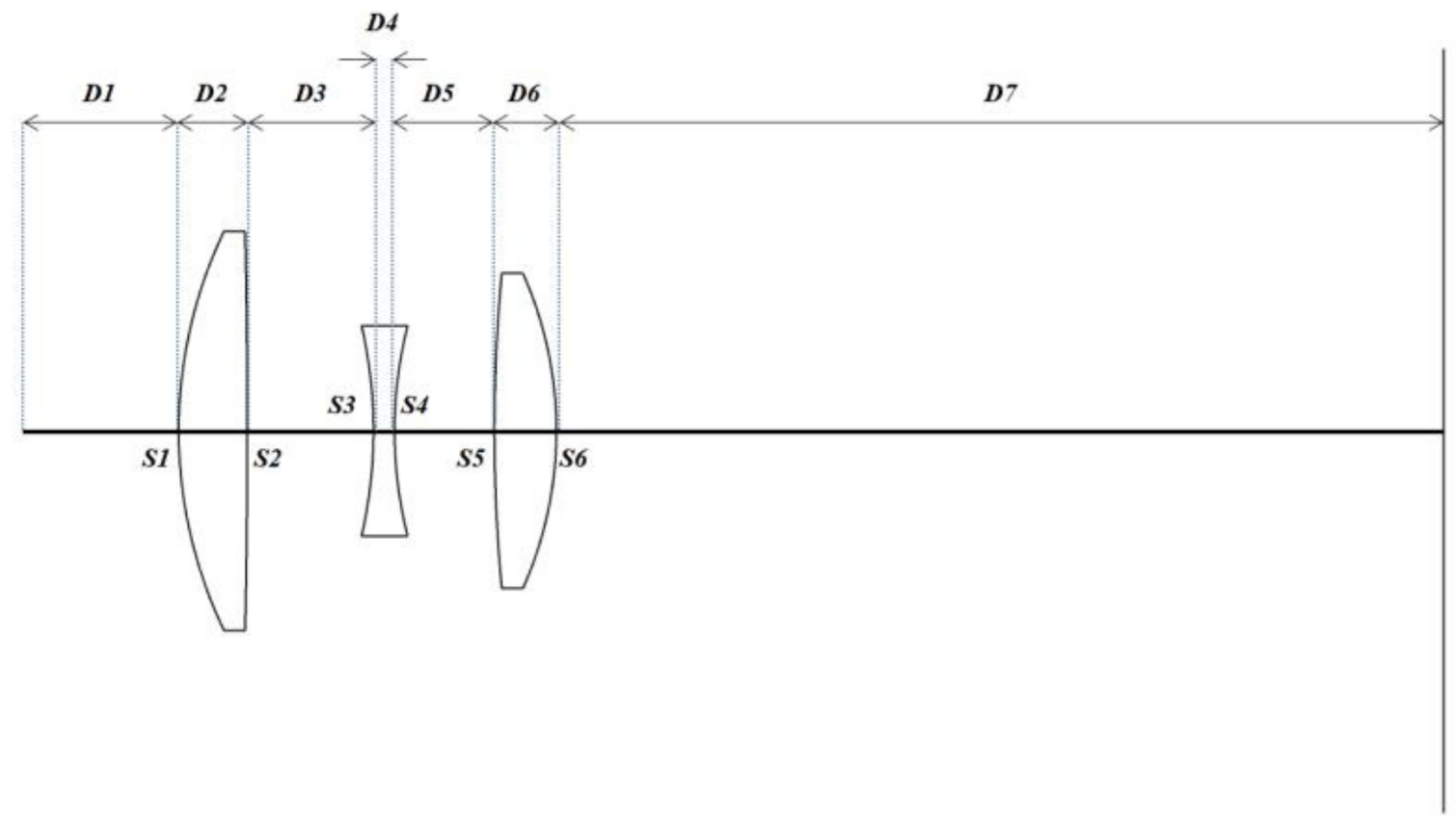
In this paper, a Cooke triplet lens is implemented for the optimization problem. Even with only three lenses, the optimization problem related to the curvature of surfaces, thickness of element and airspace, and selection of element glass is not trivial. Moreover, optimization of the triplet offers constructive insight concerning the characteristics of appropriate optimization algorithms.
1.2. Overview of Surrogate-Based Modelling
A surrogate model is also referred to as a “metamodel”, “response surface model”, “approximation model”, or “emulator” in different research fields. In complex computer simulations, finding more data requires additional experiments, which would result in extensive material or economic cost as well as computational expense. Consequently, obtaining an analytical form of derivatives or the objective function is relatively challenging. However, the derivation of the information from a surrogate model is comparatively easier, as the analytical form is known and, hence, is cheaper to evaluate. Building through the sampled data that are obtained by evaluating a set of sample points in the target space via expensive analysis code, a surrogate model can be used to efficiently predict the output of the code at any unknown point [
56].
The representative surrogate models include the polynomial response surface model (PRSM) [
57,
58], Kriging [
59,
60], radial basis functions (RBFs) [
61,
62], artificial neural network (ANN) [
63,
64], support vector regression (SVR) [
65,
66], etc.
According to Anthony et al. [
67] and Balabanov and Haftka [
68], PRSM can be applied in aircraft design. Kriging is based on the idea that a surrogate can be represented as a realization of a stochastic process. This idea was first proposed in the field of geostatistics by Krige [
69] and Matheron [
70]. It gained popularity after being used for the design and analysis of computer experiments by Sacks, Welch, Mitchell, and Wynn [
60]. Kriging is also known as a Gaussian process regression in the field of machine learning [
71,
72]. Kriging is used for process flowsheet simulations [
73], design simulations [
74], pharmaceutical process simulations [
75], and feasibility analysis [
76]. Radial basis functions have been developed for the interpolation of scattered multivariate data. RBFs are used for feasibility analysis [
77] and parameter estimation [
78]. ANN is used for process modelling [
79], process control [
80], and optimization [
81,
82]. SVR is shown to achieve comparable accuracy with that of other surrogates [
83]. SVR models are accurate as well as fast in prediction; however, the time required to build this model is high because finding the unknown parameters requires solving a quadratic programming problem. This added complexity hinders the popularity of SVR [
6].
Among them, Kriging has earned popularity in the fields of aerodynamic design optimization [
84,
85,
86,
87,
88] and structural and multidisciplinary optimization [
89,
90]. Generally, geostatistical interpolation methods that calculate the spatial autocorrelation between measurements and utilize the spatial structure of measurements around the prediction location comprise universal Kriging, ordinary Kriging, and co-Kriging [
91]. Isotropy (uniform values in all directions) is assumed during the Kriging process unless anisotropy is specified. Consequently, comparisons between isotropic and anisotropic semi-variogram-derived surfaces are not often made. Thus far, the application of anisotropy within Kriging has been shown to be superfluous for local- and regional-scale modelling, although Luo et al. [
90] hypothesized that it may be more useful for meso- and macro-scale modelling.
According to the properties of surrogate-based models, Kriging is quite suitable for the multi-objective optimization of optical systems with high dimensions; hence, in this paper, the surrogate-based model applied to the triplet is Kriging.
1.3. Design of Experiments (DOE)
Defined as a process for choosing a series of sample points in the design space and with a general target of gaining maximum information from a constrained set of samples, design of experiments (DOE) can be divided into two categories: classical and modern techniques. The classical DOE originated from the random error that exists in a non-repeatable laboratory experiment (e.g., experimental chemistry and agricultural yield studies), while modern DOE, which includes the deterministic computer simulations, can eliminate the influence of non-repeatability. Therefore, to provide a more convincing result with non-repeatable experiments, classical DOE approaches mainly involve designs of fractional-factorial [
92,
93], full-factorial [
94], Box–Behnken [
95], and central composite [
96], which normally locate sample points at the boundaries of the target space. In order to obtain the tendency of information accurately, modern DOE primarily employs space-filling designs, and the approaches in modern DOE mainly include Latin hypercube sampling (LHS) [
97,
98], pseudo-Monte Carlo sampling [
99], quasi-Monte Carlo sampling [
100], and orthogonal array sampling [
101].
Modern DOE is also distinguished from classical DOE in the aspect of choosing the probability distribution functions of design parameters. In modern DOE, the probability of design parameters can be distributed uniformly and non-uniformly (e.g., Gaussian, Weibull); on the contrary, the possible values of a design parameter in classical DOE are typically assumed to be distributed uniformly between the lower and upper extremes. Additionally, the data generated in the design and analysis of computer experiments (DACE) [
6,
102,
103,
104,
105] study of an optical imaging system can be applied in surrogate functions, normally expressed as response surface approximations [
106], to assist the optimization process. Considering the complex relationships among input design parameters and imaging quality in the design of optical imaging systems, the independent sample points in the design and analysis of computer experiments (DACE) make it possible to utilize parallel computing, either on a multiprocessor computer or over a network [
107].
Providentially, a perennial study in mathematical formulation leveraged by the progress in computer power enabled techniques developed for DACE to be successfully employed in various problems (e.g., design of energy and aerospace [
108,
109,
110] systems, manufacturing [
111], bioengineering [
112,
113], and decision under uncertainty [
114]). Such techniques comprise a series of methodologies for generating a surrogate model, which can be used to substitute the expensive simulation code. The aim is to build an estimate of the response that is as accurate as possible under a limited number of expensive simulations [
115].
Among the modern DOE methods, Metropolis and Ulam [
99] first applied pseudo-Monte Carlo sampling into the field of computer simulations in 1949, with the utilization of a pseudo-random number generation algorithm aimed to imitate an indeed random natural procedure. Pseudo-Monte Carlo sampling, also known as Monte Carlo (MC) sampling, is suitable for convex but not rectangular design spaces, whereas the employment in high-dimensional and non-convex design spaces is rather difficult.
Quasi-Monte Carlo sampling [
100], also named low-discrepancy sampling, has a common characteristic with pseudo-Monte Carlo sampling in that both approaches were developed for multidimensional integration. One of the fundamental differences between them is that quasi-Monte Carlo sampling can almost generate uniform samplings in a high-dimensional space with the employment of a deterministic algorithm [
116]. Stemming from MC sampling, the stratified Monte Carlo sampling method [
117] can create a more uniform sampling and offer superior overall coverage of the design space.
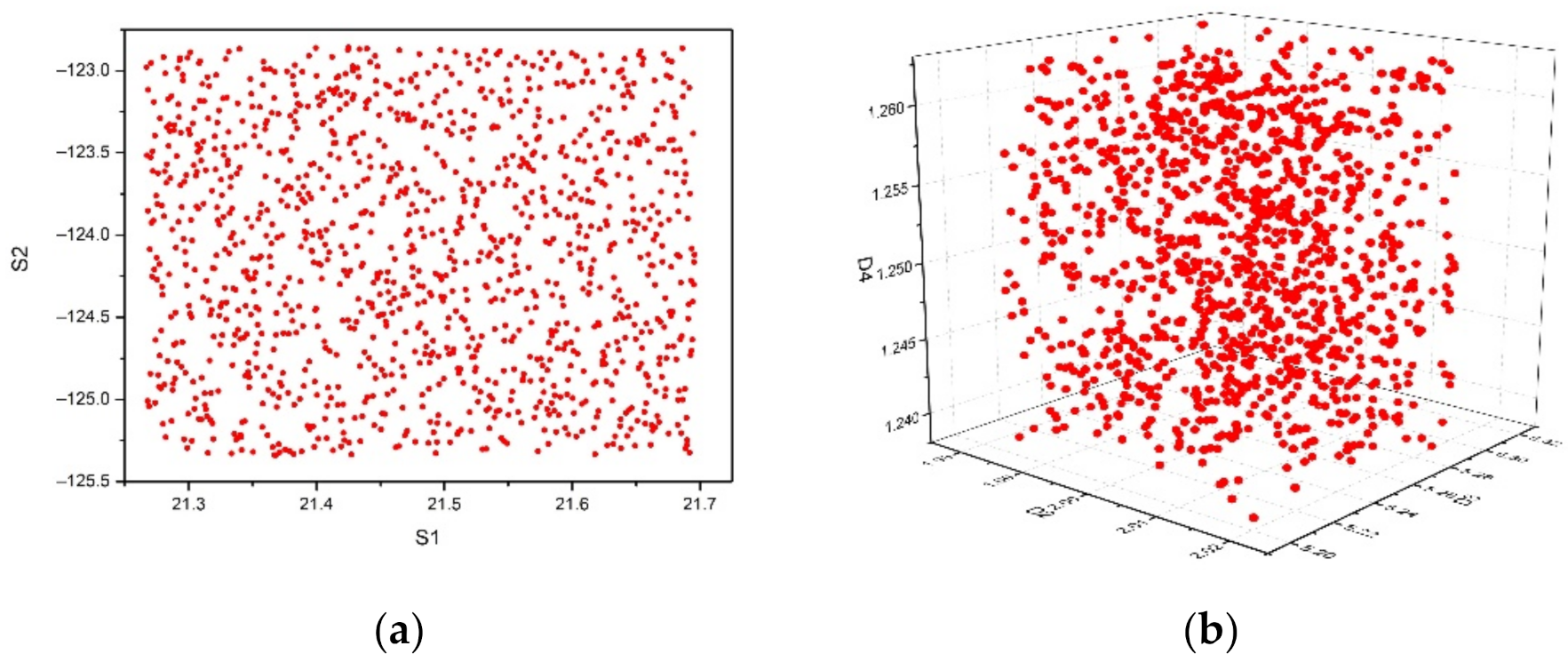
Developed by McKay et al. [
118] as a substitute for pseudo-Monte Carlo sampling, Latin hypercube sampling (LHS) is one of the most widely and prevalently used space-filling methods for DOE. Under certain assumptions associated with the function to be sampled, Latin hypercube sampling provides a more accurate estimate of the mean value of the function than does MC sampling. As a result, the LHS can estimate less error in the mean value than the mean value estimated with MC sampling, under the condition of an equal number of samples. Another attractive aspect of the Latin hypercube design is that it allows the user to tailor the number of samples to the available computational budget. That is, a Latin hypercube design can be configured with any number of samples and is not restricted to sample sizes that are specific multiples or powers of
n.
However, with a considerable number of design variables, it is challenging for the Latin hypercube design to provide a good coverage of the entire high-dimensional design space. In order to break this curse of dimensionality, constructing space-filling designs in low-dimensional projections is a promising approach. Such approaches comprise randomized orthogonal arrays [
117], orthogonal array-based Latin hypercube designs [
118], and the construction of orthogonal Latin hypercube designs [
119]. The introduction of orthogonality into the Latin hypercube design is directly beneficial in fitting data with polynomial models. In addition, orthogonality can be considered as a stepping-stone to designs that are space-filling in low-dimensional projections [
120].
Latin hypercube designs [
98,
121] have become particularly popular among all strategies mentioned above for computer experiments. According to Viana [
115], the Latin hypercube design has a close growth rate in publications with DACE. Further evidence of the popularity of the Latin hypercube design is the number and diversity of the reported applications in which the LHS is used. For example, with the dedication of evaluating applications of surrogate modeling, the Latin hypercube design appears in eight out of the sixteen chapters in the book edited by Koziel and Leifsson [
122]. On account of the advantages and popularity of the Latin hypercube design, it was chosen as the DACE method in this paper.
1.4. Multi-Objective Optimization (MOO)
In practical engineering, problems encountered by engineers with multiple objectives are known as multi-objective problems (MOPs), and MOPs with at least four objectives are casually known as many-objective problems (MaOPs) [
123]. Multi-objective evolutionary algorithms (MOEAs) are typically applied to solve MOPs, which can be divided into decomposition-based [
123,
124,
125,
126], indicator-based [
127,
128], and Pareto-based [
129,
130,
131] algorithms. However, it should be pointed out that the MOEAs confront three challenges when handling MaOPs, namely, dominance resistance (DR) phenomenon, dimensional curse, and visualization difficulty [
132]. To solve the first challenge efficiently, three methods have been introduced, including modification of the Pareto dominance relation, an indicator-based approach, and enhanced diversity management [
133].
Even though these methods can deal with MOPs effectively, there are still high computational burdens. The third approach for MaOPs is to enhance diversity management. For example, the NSGA-II [
134] algorithm managed the activation and deactivation of the crowding distance to maintain diversity. As one of the Pareto-based algorithms, NSGA-III [
135,
136] achieved great success in practical application, which replaced the crowding distance operator in the NSGA-II with a clustering operator and used a set of well-distributed reference points to guarantee diversity. Although the NSGA-III algorithm can achieve good diversity, its performance needs to be improved by remedying deficiency or expanding application.
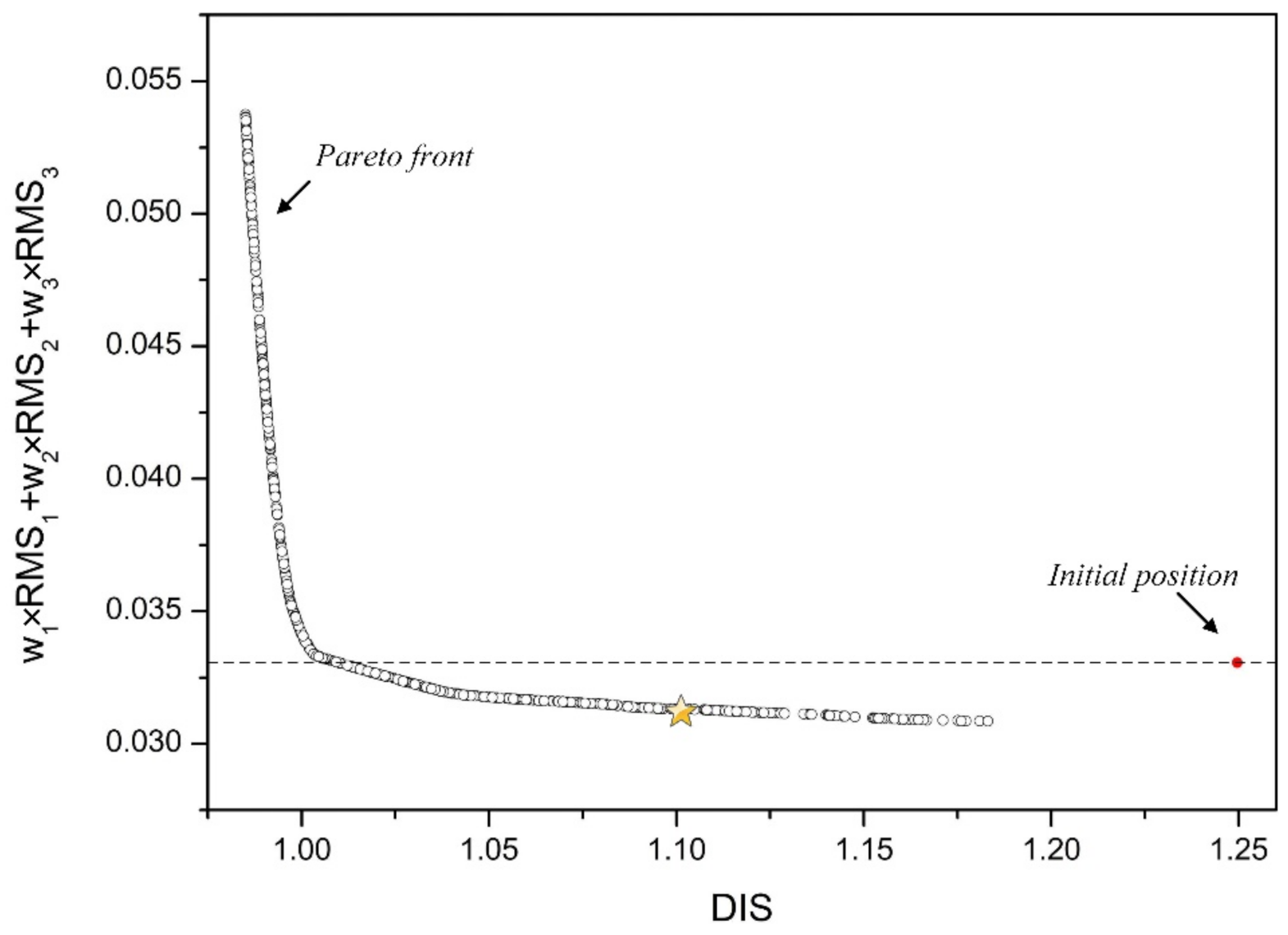
In this paper, the multi-objective algorithm NSGA-III is adopted in the model proposed. NSGA-III has been widely applied to different areas, such as the economic dispatch problem [
137] and the ship hull form optimization [
138]. This algorithm does not need to convert multiple targets into a single one. It can directly optimize multiple targets at the same time and provide a non-dominated solution set as output. From this solution set, designers can search for the optimal solutions according to their optimization focus and strategy. The multi-objective optimization method proposed in this paper has great potential to be used in the design process of complex high-precision optical systems [
15,
135,
136].











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}