
A Practical Approach to Deploying a Drone-Based Message Ferry in a Disaster Situation †


Abstract
:1. Introduction
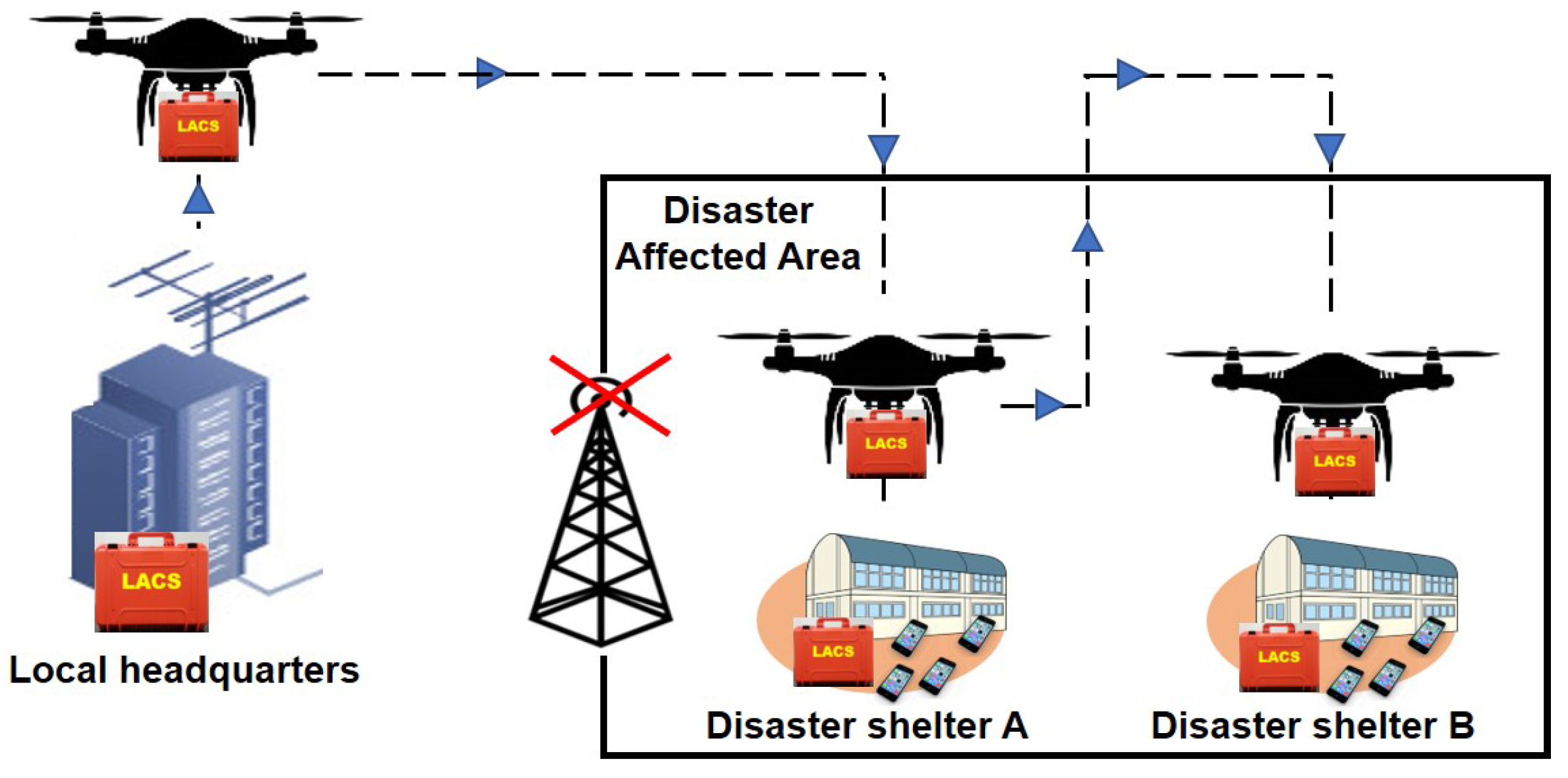
- Firstly, we devise an approach to deploying a drone-based message ferry using LACS in the disaster affected areas in order to achieve urgent restoration of network function in a local context.
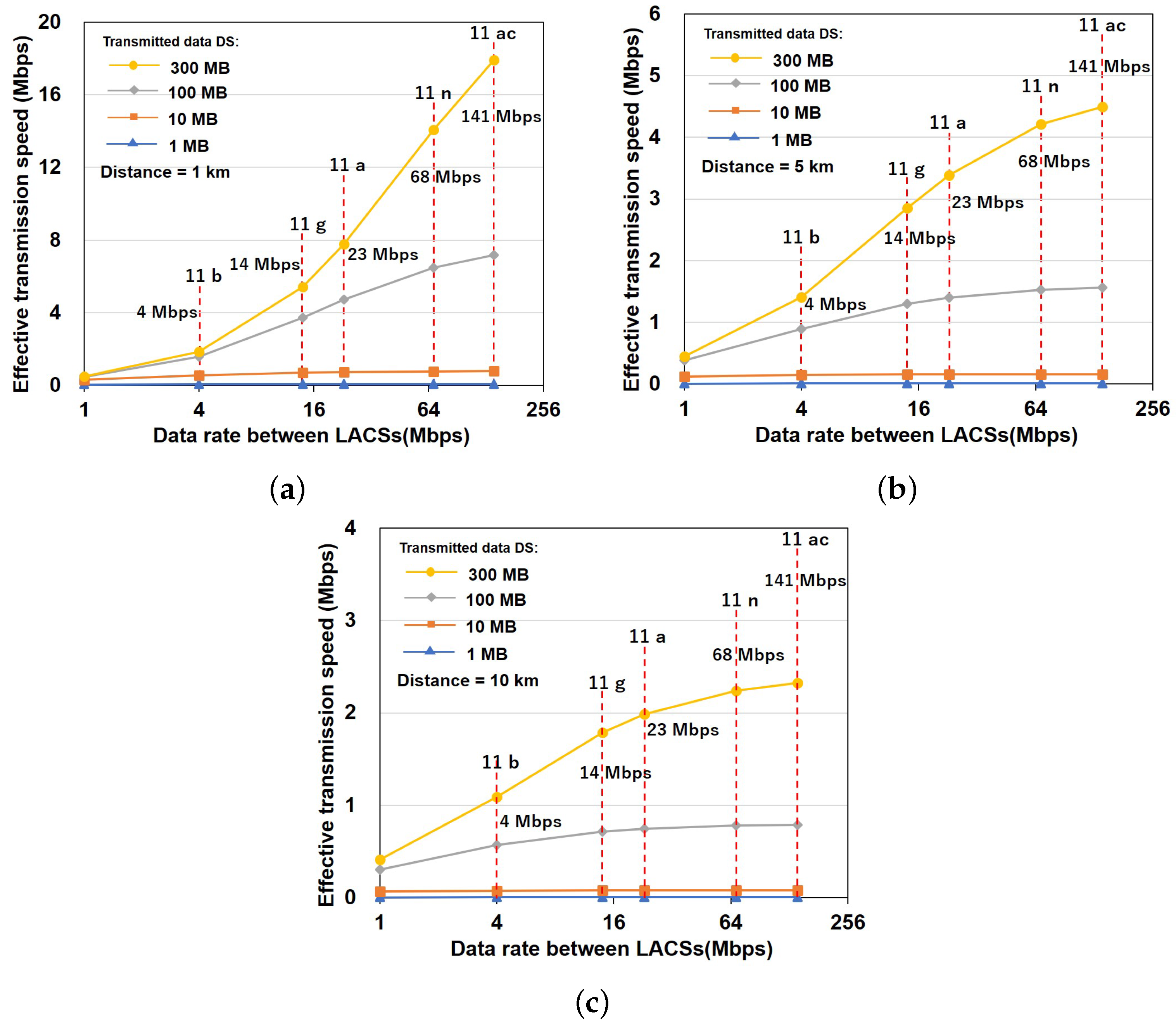
- Secondly, we derive a method to analyze the effective transmission speed that the message ferry can achieve in order to extend the LACS-based service area in a disaster situation.
- Furthermore, we analyze and confirm the effective transmission speed that is useful in transferring data of various sizes when the message ferry is utilized to transfer data from the local headquarters to each disaster shelter.
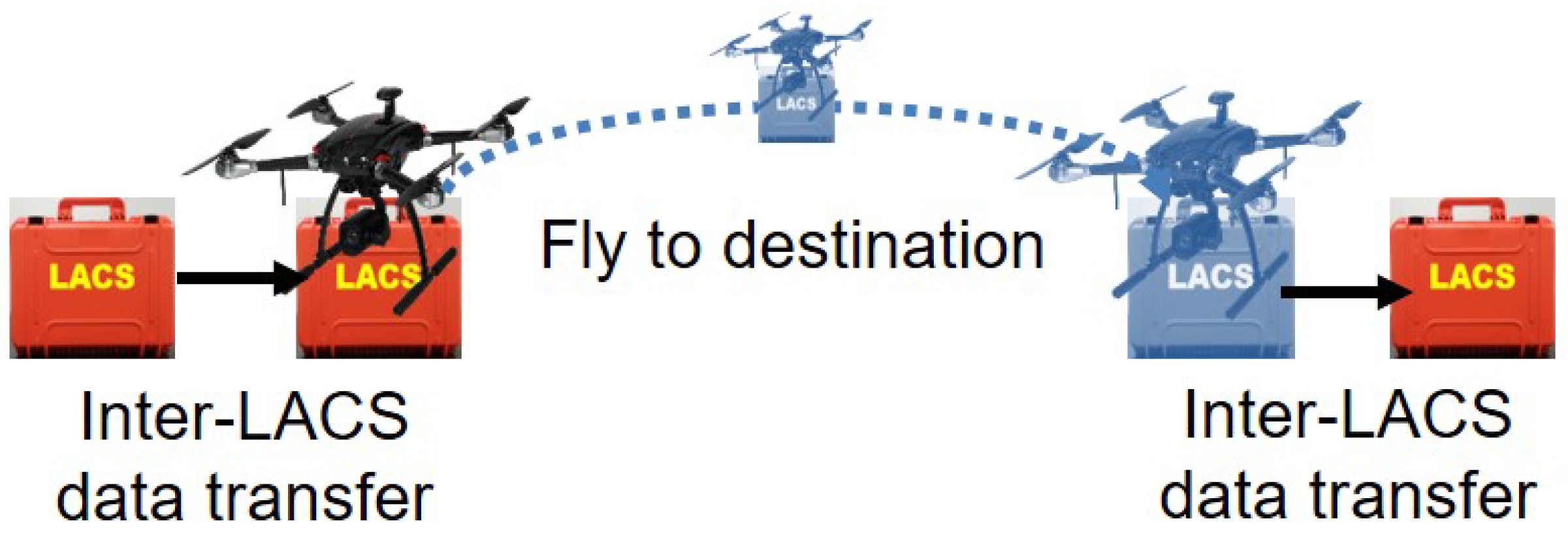
- Finally, we evaluate the performance of the proposed message ferry by conducting an experiment. In the experimentation, we use the LACS prototype and measure the inter-LACS data transfer rate. The measured data transfer rate is utilized to confirm the effective transmission speed of the message ferry in a disaster situation.
2. Overview of Locally Accessible Cloud System (LACS)
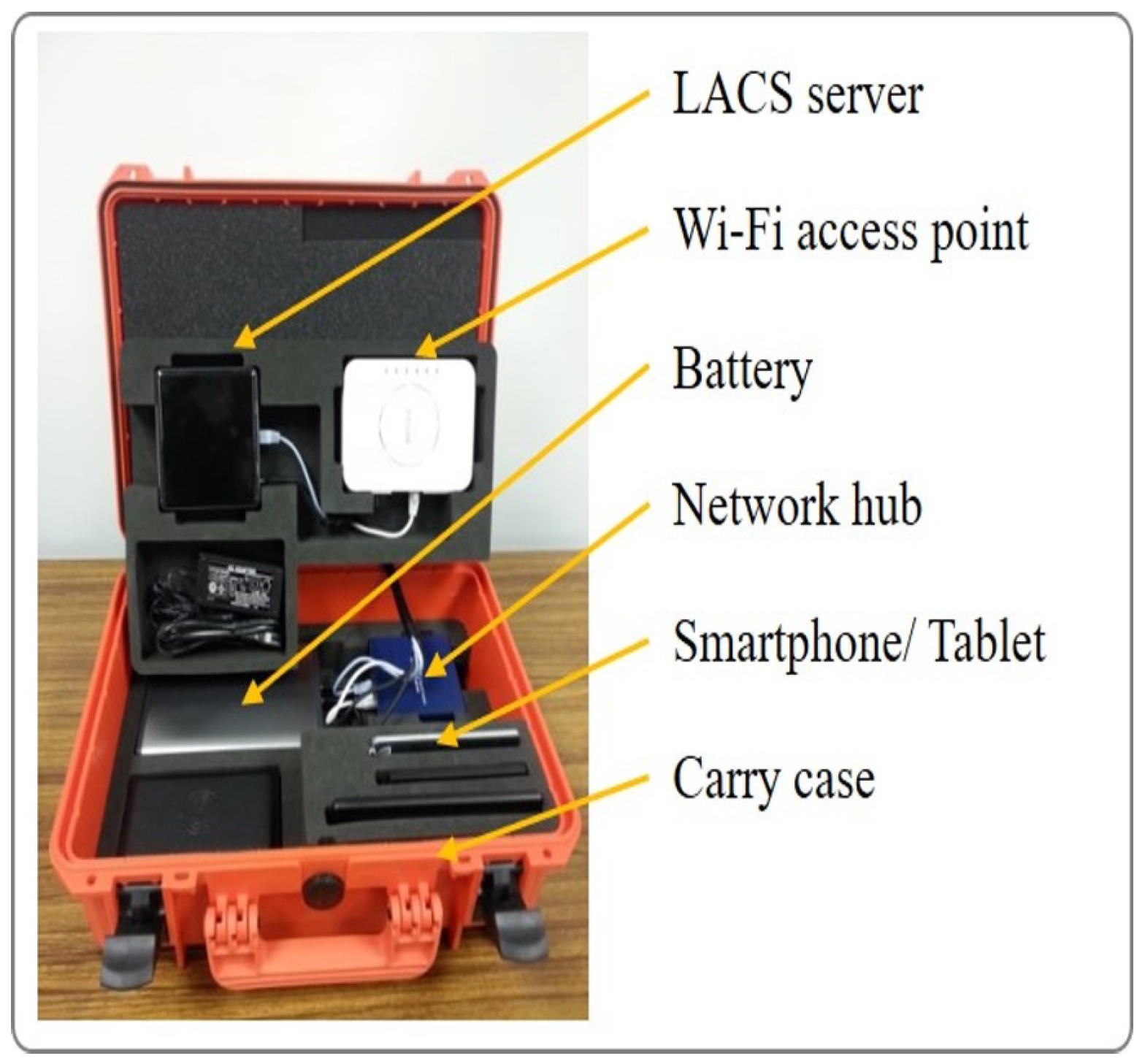
2.1. Locally Accessible Cloud System (LACS)
2.2. Use-Cases of LACS
- Disaster
- Local Government—Broadcasting urgent and vital information to residents.
- Disaster Shelter—Bulletin board, emergency inventory management, etc.
- First Responders (e.g., firefighters, police, etc.)—Sharing and gathering information, etc.
- Normal daily uses
- Local Government—Disseminate critical and time-sensitive information to residents, equipment and inventory management system, etc.
- School—Bulletin Board, record management, eLearning, etc.
- Office—Temporary file storage, record management, information bulletin board, etc.
- Residents’ Association—Bulletin board, housing records management, instant messaging service, etc.
- First Responders (e.g., firefighters, police, etc.)—Installed in vehicle for sharing and gathering information, temporary storage and record management, etc.
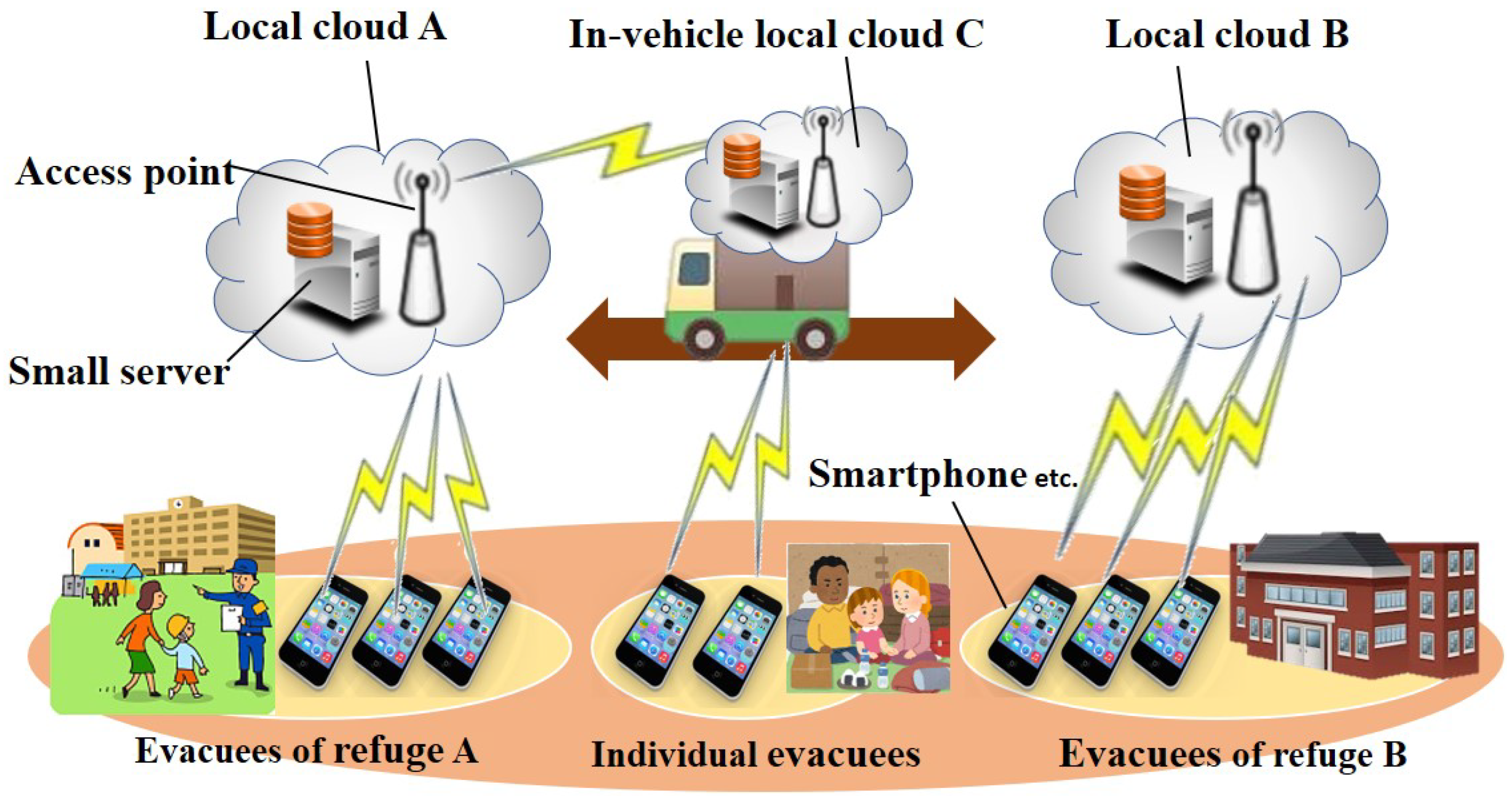
2.3. Information Delivery and Collection System Using LACS
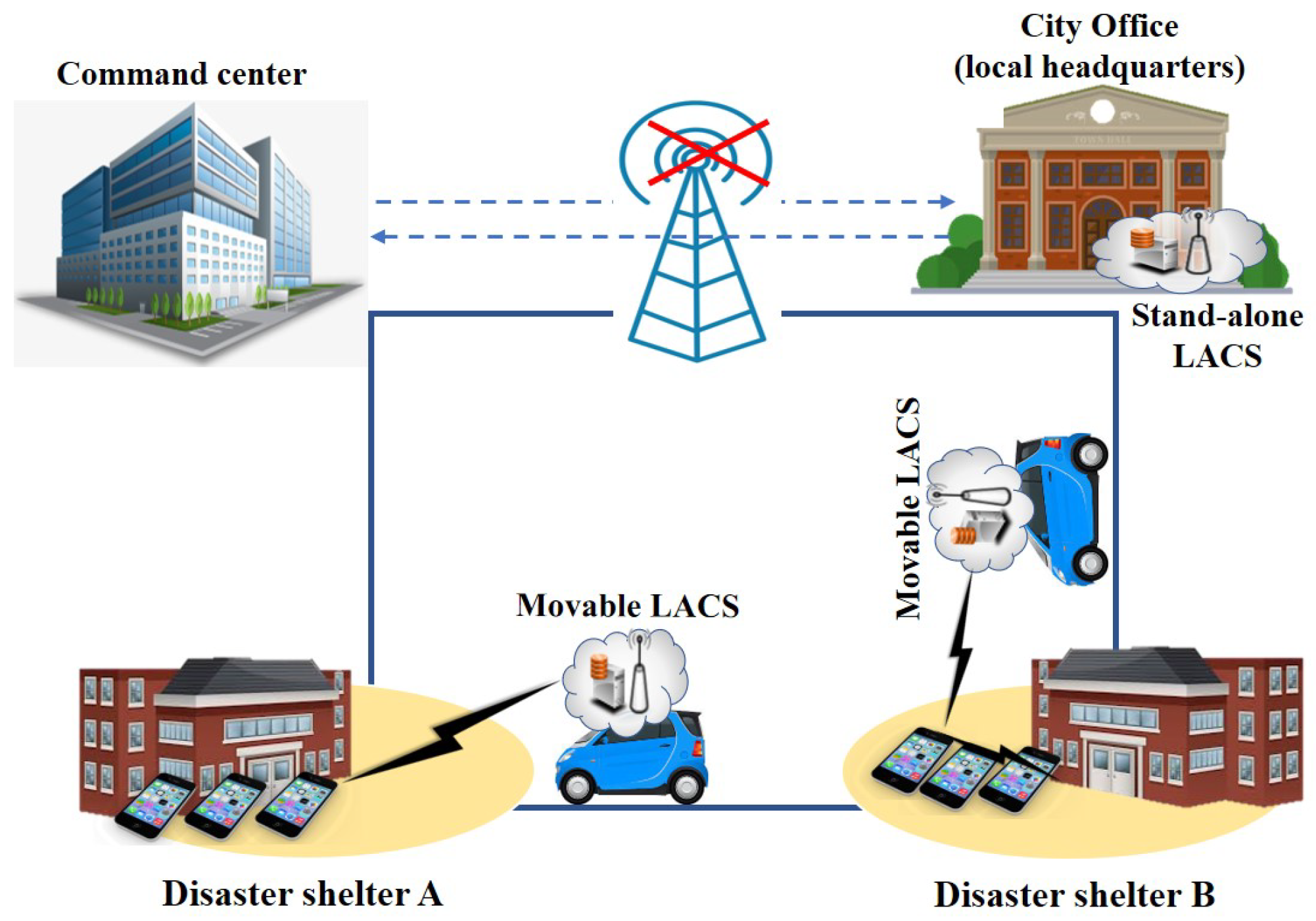
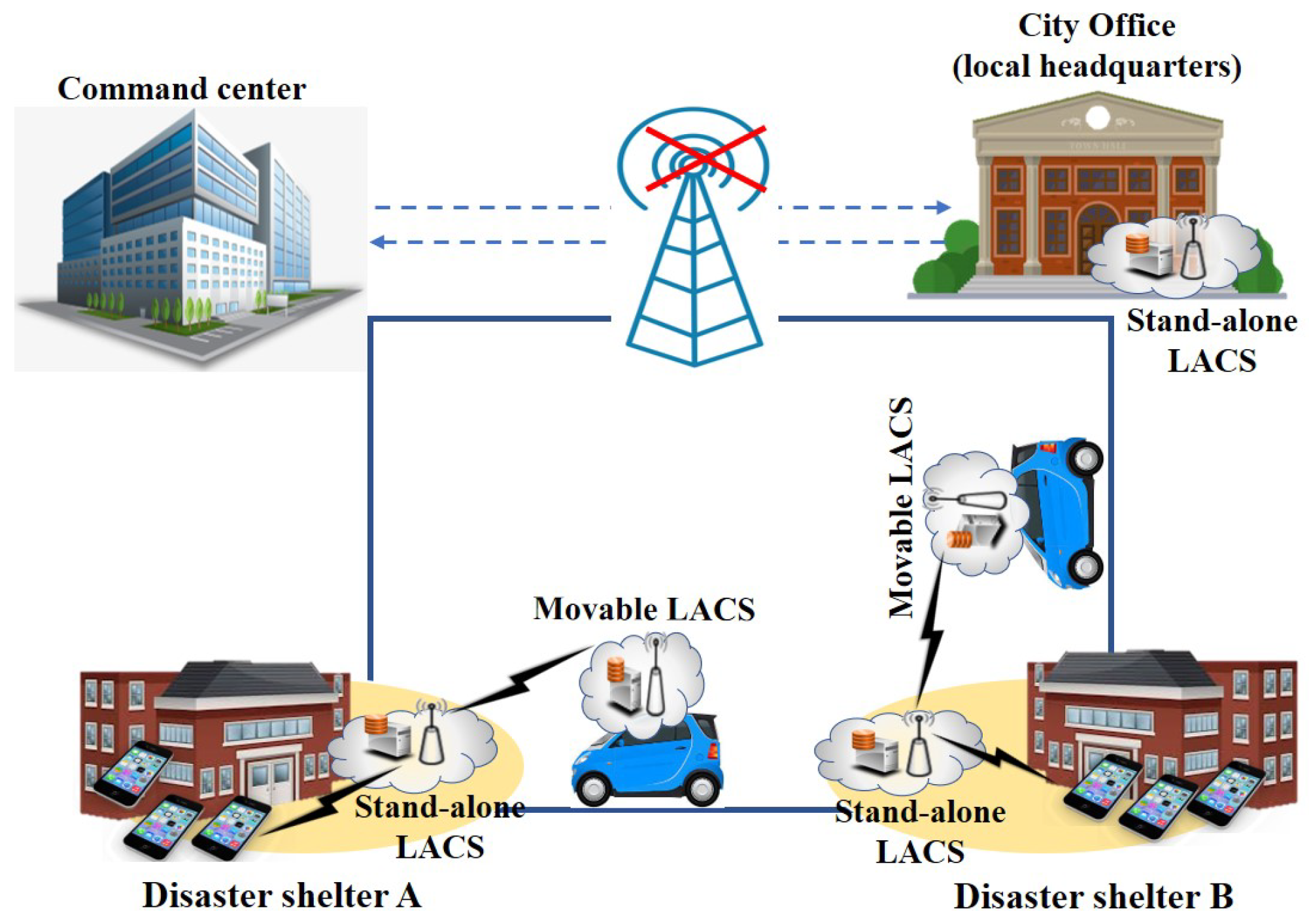
3. Proposed Drone-Based Message Ferry for LACS Network
4. Evaluation
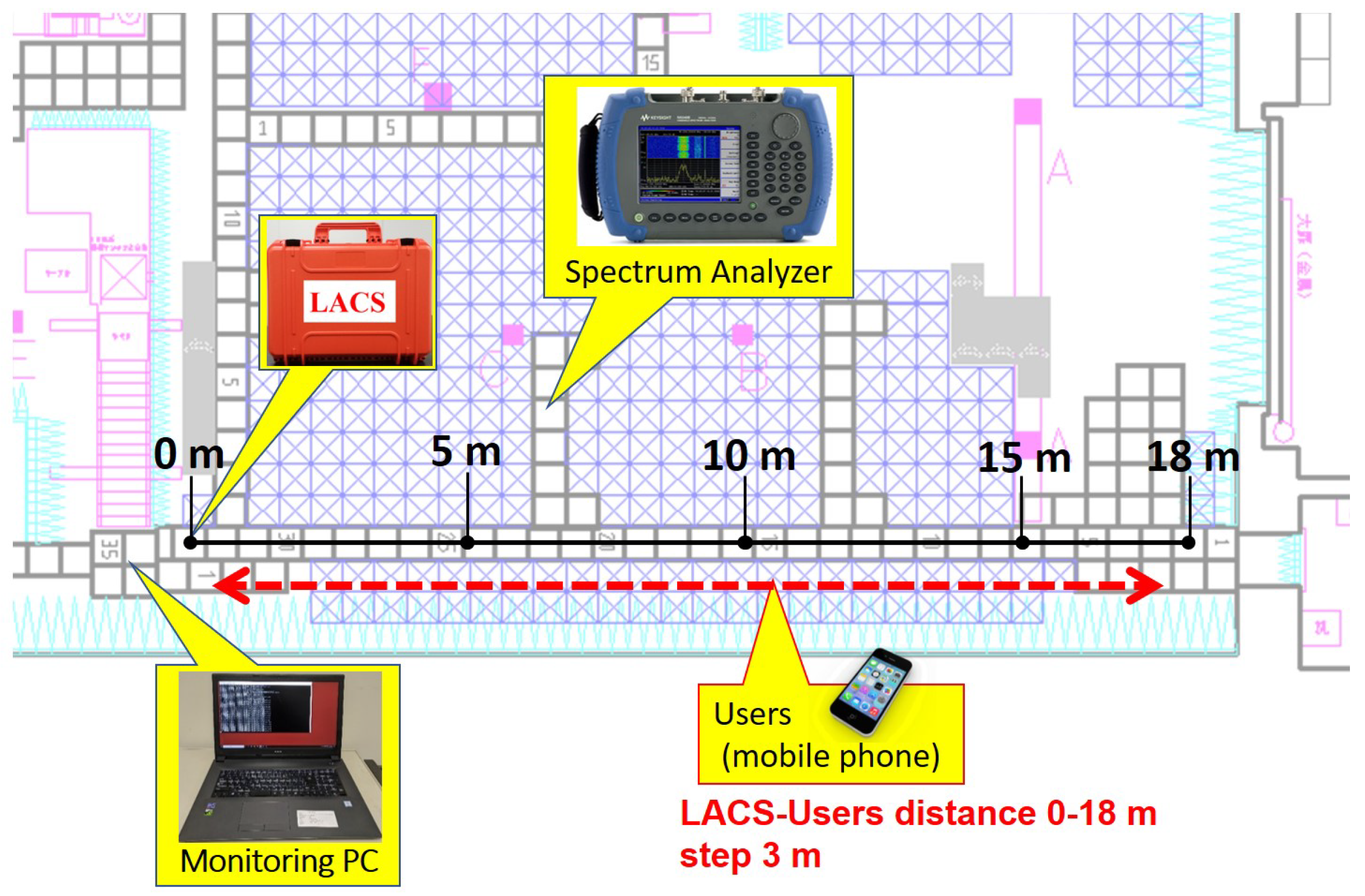
4.1. Experiment Setup
4.2. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| LACS | Locally Accessible Cloud System |
| ICT | Information and Communications Technology |
| MANET | Mobile Ad-hoc NETwork |
| SIP4D | Shared Information Platform for Disaster Management |
References
- Luo, C.; Miao, W.; Ullah, H.; McClean, S.; Parr, G.; Min, G. Unmanned Aerial Vehicles for Disaster Management. In Geological Disaster Monitoring Based on Sensor Networks; Durrani, T., Wang, W., Forbes, S., Eds.; Springer Natural Hazards; Springer: Singapore, 2019. [Google Scholar] [CrossRef]
- Nippon Telegraph and Telephone East Corporation (NTT-East). Status of Full-Fledged Recovery following the Great East Japan Earthquake and Future Measures. Available online: https://www.ntt-east.co.jp/en/release/detail/pdf/20120301_02_01.pdf (accessed on 27 January 2022).
- Kishorbhai, V.Y.; Vasantbhai, N.N. AON: A Survey on Emergency Communication Systems during a Catastrophic Disaster. Procedia Comput. Sci. 2017, 115, 838–845. [Google Scholar] [CrossRef]
- Ishimaru, Y.; Sun, W.; Yasumoto, K.; Ito, M. DTN-based Delivery of Word-of-Mouth Information with Priority and Deadline. In Proceedings of the 5th International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Seattle, WA, USA, 26–28 April 2010; pp. 179–185. [Google Scholar]
- Ueda, Y. Vehicle-mounted Transportable Mobile Base Station and Backhaul Link for Disaster Relief Operation. The ITU Association of Japan, New Breeze 2014; Volume 26, No. 3, pp. 2–3. Available online: https://www.ituaj.jp/wp-content/uploads/2014/07/nb26-3_web-2_sf_mobile-1.pdf (accessed on 27 January 2022).
- Kumbhar, A.; Singh, S.; Guvenc, I. UAV assisted public safety communications with LTE-Advanced HetNets and FeICIC. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Pozza, M.; Rao, A.; Flinck, H.; Tarkoma, S. Network-In-a-Box: A Survey About On-Demand Flexible Networks. IEEE Commun. Surv. Tutor. 2018, 20, 2407–2428. [Google Scholar] [CrossRef] [Green Version]
- Kunz, A.; Tanaka, I.; Husain, S.S. Disaster response in 3gpp mobile networks. In Proceedings of the 2013 IEEE International Conference on Communications Workshops (ICC), Budapest, Hungary, 9–13 June 2013; pp. 1226–1231. [Google Scholar]
- Aoyagi, K.; Hapsari, W.A.; Takeda, S.; Tanaka, I. Further Development of LTE-Advanced—Release 12 Standardization Trends—Access Class Control Technology in LTE/LTE-Advanced Systems. NTT DOCOMO Tech. J. 2015, 17, 65–76. Available online: https://www.docomo.ne.jp/english/binary/pdf/corporate/technology/rd/technical_journal/bn/vol17_2/vol17_2_000en.pdf (accessed on 1 April 2022).
- Fotouhi, A.; Ding, M.; Hassan, M. Dynamic base station repositioning to improve spectral efficiency of drone small cells. In Proceedings of the 2017 IEEE 18th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Macau, China, 12–15 June 2017; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Uchida, O.; Kosugi, M.; Endo, G.; Funayama, T.; Utsu, K.; Tajima, S.; Tomita, M.; Kajita, Y.; Yamamoto, Y. A Real-Time Disaster-Related Information Sharing System Based on the Utilization of Twitter. In Proceedings of the SOTICS 2015: The Fifth International Conference on Social Media Technologies, Communication and Informatics, Barcelona, Spain, 15–20 November 2015; pp. 22–25. [Google Scholar]
- George, S.; Zhou, W.; Chenji, H.; Won, M.; Lee, Y.; Pazarloglou, A.; Stoleru, R.; Barooah, P. DistressNet: A wireless ad hoc and sensor network architecture for situation management in disaster response. IEEE Commun. Mag. 2010, 48, 128–136. [Google Scholar] [CrossRef]
- Nishiyama, H.; Ito, M.; Kato, N. Relay-by-smartphone: Realizing multihop device-to-device communications. IEEE Commun. Mag. 2014, 52, 56–65. [Google Scholar] [CrossRef]
- Mishra, A.; Nadkarni, K.M. Security in Wireless Ad Hoc Networks; CRC Press LLC: Boca Raton, FL, USA, 2003; Chapter 30. [Google Scholar]
- Ojetunde, B.; Sakano, T.; Suzuki, Y. Information Delivery and Collection System Based on Locally Accessible System. In Proceedings of the 2021 International Conference on Information and Communication Technologies for Disaster Management (ICT-DM), Hangzhou, China, 3–5 December 2021; pp. 142–149. [Google Scholar] [CrossRef]
- Sakano, T.; Teng, R.; Yano, K.; Shimizu, S.; Suzuki, Y. A Study on a system for alleviating communication difficulty based on promptly deployable local clouds in the disaster affected areas. In Proceedings of the IEICE General Conference, Tokyo, Japan, 19–22 March 2019; pp. 7–46. [Google Scholar]
- Teng, R.; Sakano, T.; Suzuki, Y. Instantaneous Networking Service Availability for Disaster Recovery. Appl. Sci. 2020, 10, 9030. [Google Scholar] [CrossRef]
- Harounabadi, M.; Bocksberger, M.; Mitschele-Thiel, A. Study on the Network Architectures for Message Ferry Networks with Multiple UAVs. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 59–63. [Google Scholar] [CrossRef]
- Barroca, C.; Grilo, A.; Pereira, P.R. Improving Message Delivery in UAV-based Delay Tolerant Networks. In Proceedings of the 2018 16th International Conference on Intelligent Transportation Systems Telecommunications (ITST), Lisboa, Portugal, 15–17 October 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Nguyen, M.T.; Nguyen, C.V.; Do, H.T.; Hua, H.T.; Tran, T.A.; Nguyen, A.D.; Ala, G.; Viola, F. UAV-Assisted Data Collection in Wireless Sensor Networks: A Comprehensive Survey. Electronics 2021, 10, 2603. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. Routing Protocols for Unmanned Aerial Vehicle Networks: A Survey. IEEE Access 2019, 7, 99694–99720. [Google Scholar] [CrossRef]
- Harada, H.; Mizutani, K.; Fujiwara, J.; Mochizuki, K.; Obata, K.; Okumura, R. IEEE 802.15.4g Based Wi-SUN Communication Systems. IEICE Trans. Commun. 2017, E100-B, 1032–1043. [Google Scholar] [CrossRef] [Green Version]
- Seferagić, A.; Famaey, J.; De Poorter, E.; Hoebeke, J. Survey on Wireless Technology Trade-Offs for the Industrial Internet of Things. Sensors 2020, 20, 488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sakano, T.; Ojetunde, B.; Suzuki, Y.; Llanto, J.; Sharmaand, C. Feasibility study of Locally Accessible Cloud System (LACS) conducted in a remote island in Cebu, Philippines to meet the real demand for ICT under the COVID-19 pandemic. In Proceedings of the 2nd International Symposium on Disaster Resilience & Sustainable Development, Online, 24–25 June 2021. [Google Scholar]
- International Telecommunication Union (ITU). Utilizing Telecommunications/Information and Communication Technologies for Disaster Risk Reduction and Management: Output Report on ITU-D Question 5/2 for the Study Period 2018–2021. Annex 1. Detailed Use Cases: Disaster Communication Technologies—Locally Accessible Cloud System. 2021; pp. 71–74. Available online: https://www.itu.int/dms_pub/itu-d/opb/stg/D-STG-SG02.05.2-2021-PDF-E.pdf (accessed on 1 April 2022).
- Varghese, B.; Wang, N.; Barbhuiya, S.; Kilpatrick, P.; Nikolopoulos, D.S. Challenges and Opportunities in Edge Computing. In Proceedings of the 2016 IEEE International Conference on Smart Cloud (SmartCloud), New York, NY, USA, 18–20 November 2016; pp. 20–26. [Google Scholar] [CrossRef] [Green Version]
- Usuda, Y.; Hanashima, M.; Sato, R.; Sano, H. Effects and Issues of Information Sharing System for Disaster Response. J. Disaster Res. 2017, 12, 1002–1014. [Google Scholar] [CrossRef]
- Owada, Y.; Kuri, T. Toward Distributed Edge Cloud Systems for Smart and Resilient Social Infrastructure. In NICT News. Available online: https://www.nict.go.jp/en/data/nict-news/NICT_NEWS_2021-487_E.pdf (accessed on 27 January 2022).
- Laghari, A.A.; He, H.; Khan, A.; Karim, S. Impact of Video File Format on Quality of Experience (QoE) of Multimedia Content. 3D Res 2018, 9, 39. [Google Scholar] [CrossRef]
- Usuda, Y.; Matsui, T.; Deguchi, H.; Hori, T.; Suzuki, S. The Shared Information Platform for Disaster Management—The Research and Development Regarding Technologies for Utilization of Disaster Information. J. Disaster Res. 2019, 14, 279–291. [Google Scholar] [CrossRef]
- Nguyen, V.-L.; Lin, P.-C.; Hwang, R.-H. Energy Depletion Attacks in Low Power Wireless Networks. IEEE Access 2019, 7, 51915–51932. [Google Scholar] [CrossRef]
- Medina, C.A.; Pérez, M.R.; Trujillo, L.C. IoT Paradigm into the Smart City Vision: A Survey. In Proceedings of the 2017 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Exeter, UK, 21–23 June 2017; pp. 695–704. [Google Scholar] [CrossRef]
- ACSL ACSL-PF2 Industrial Platforms. Available online: https://vfr.co.jp/wp-content/uploads/2021/06/PF2_A4_01_EN_compressed.pdf (accessed on 1 April 2022).
- Buffalo FS-M1266 Series. FS-M1266. Available online: https://www.buffalo.jp/product/detail/fs-m1266.html (accessed on 27 January 2022).
- Intel. Different Wi-Fi Protocols and Data Rates. Available online: https://www.intel.com/content/www/us/en/support/articles/000005725/network-and-i-o/wireless.html (accessed on 27 January 2022).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Number of LACS | 1 |
| Protocol | b/g, |
| 802.11 ac/n/a | |
| LACS AP frequency band | 2.4/5 GHz |
| Channel width | 20/40/80 MHz |
| Maximum Data rate | 11, 54, 300, 866 Mbps |
| Number of movable LACS (mobile phone) | 1 |
| Distance to LACS | 3–18 m |
| Data Size | 1–300 MB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ojetunde, B.; Ano, S.; Sakano, T. A Practical Approach to Deploying a Drone-Based Message Ferry in a Disaster Situation. Appl. Sci. 2022, 12, 6547. https://doi.org/10.3390/app12136547
Ojetunde B, Ano S, Sakano T. A Practical Approach to Deploying a Drone-Based Message Ferry in a Disaster Situation. Applied Sciences. 2022; 12(13):6547. https://doi.org/10.3390/app12136547
Chicago/Turabian StyleOjetunde, Babatunde, Susumu Ano, and Toshikazu Sakano. 2022. "A Practical Approach to Deploying a Drone-Based Message Ferry in a Disaster Situation" Applied Sciences 12, no. 13: 6547. https://doi.org/10.3390/app12136547
APA StyleOjetunde, B., Ano, S., & Sakano, T. (2022). A Practical Approach to Deploying a Drone-Based Message Ferry in a Disaster Situation. Applied Sciences, 12(13), 6547. https://doi.org/10.3390/app12136547