
UAV Attitude Angle Measurement Method Based on Magnetometer-Satellite Positioning System


Abstract
:Featured Application
Abstract
1. Introduction
2. Measurement Principle and Error Analysis
2.1. Principle of Measurement of Attitude Angle Information by the Magnetometer and Satellite System
2.2. Combined Measurement Error Model
2.3. Measurement Error Analysis
3. Magnetometer Calibration Based on Least-Squares Fitting Algorithm
3.1. Ellipsoid Model
3.2. Ellipsoid Fitting Based on Least Squares Algorithm
3.3. Magnetometer Calibration
4. Interference Compensation Algorithm
4.1. Principle of Interference Compensation
4.2. Coefficient Tuning Independent of Environmental Information
5. Measurement Error Compensation Based on Kalman Filter Algorithm
5.1. “Current” Statistical Motion Model
5.2. Continuous-Discrete System Kalman Filter Algorithm
6. Test and Analysis
- Step 1: Connect the direction of the sensor to the turntable and make it consistent;
- Step 2: Fix the pointing angle of the turntable;
- Step 3: Adjust the pitch angle of the turntable to be fixed, so that the turntable rolls and records the data;
- Step 4: Adjust the pitch of the turntable to another angle and fix it to make the turntable roll and record data; repeat this step to collect data at different pitch angles;
- Step 5: Fix the pitch angle of the turntable;
- Step 6: Adjust the pointing angle of the turntable to be fixed, so that the turntable rolls and records the data;
- Step 7: Adjust the pointing of the turntable to another angle and fix it, so that the turntable rolls and records data; repeat this step to collect data at different pointing angles;
6.1. Magnetometer Calibration
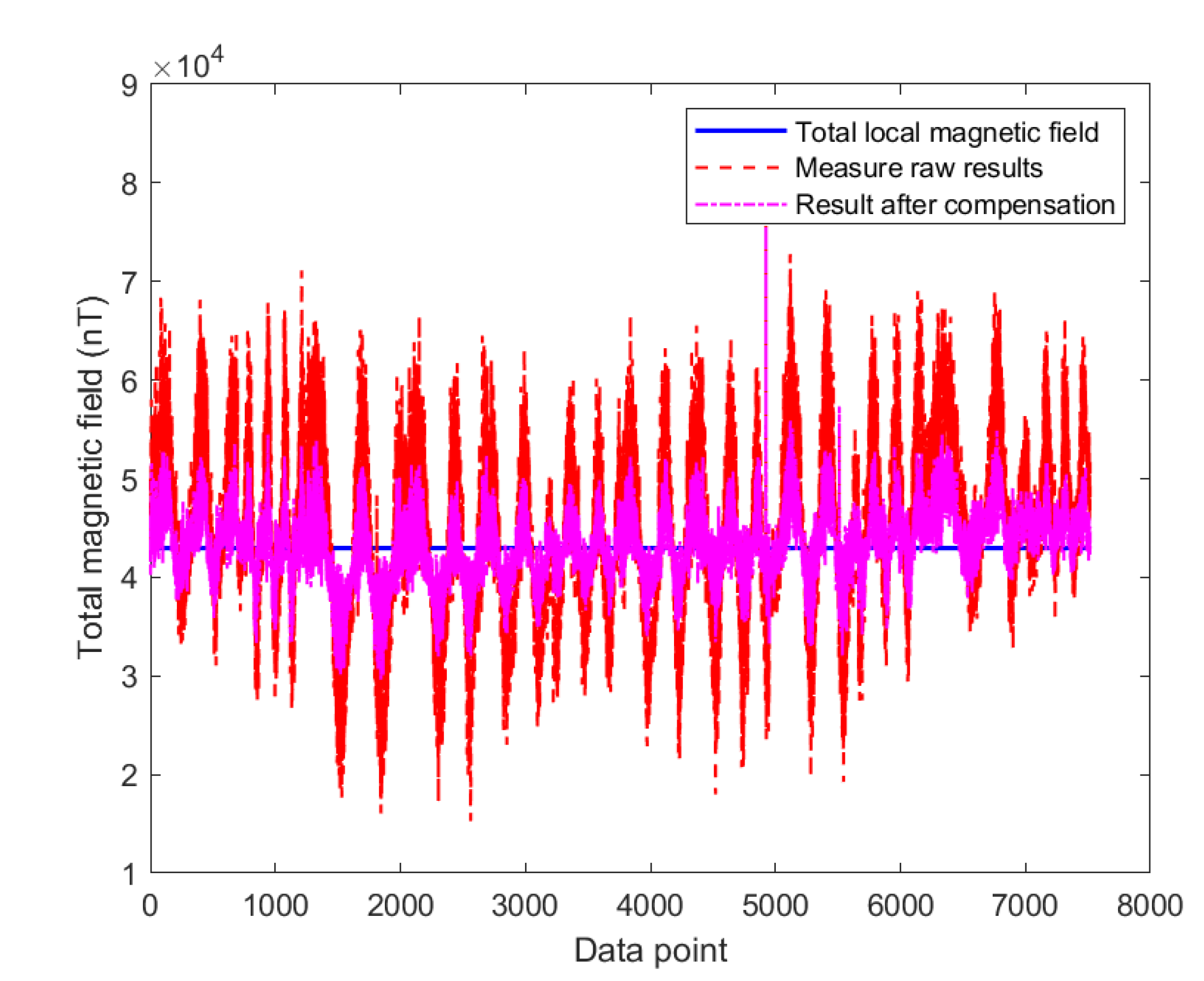
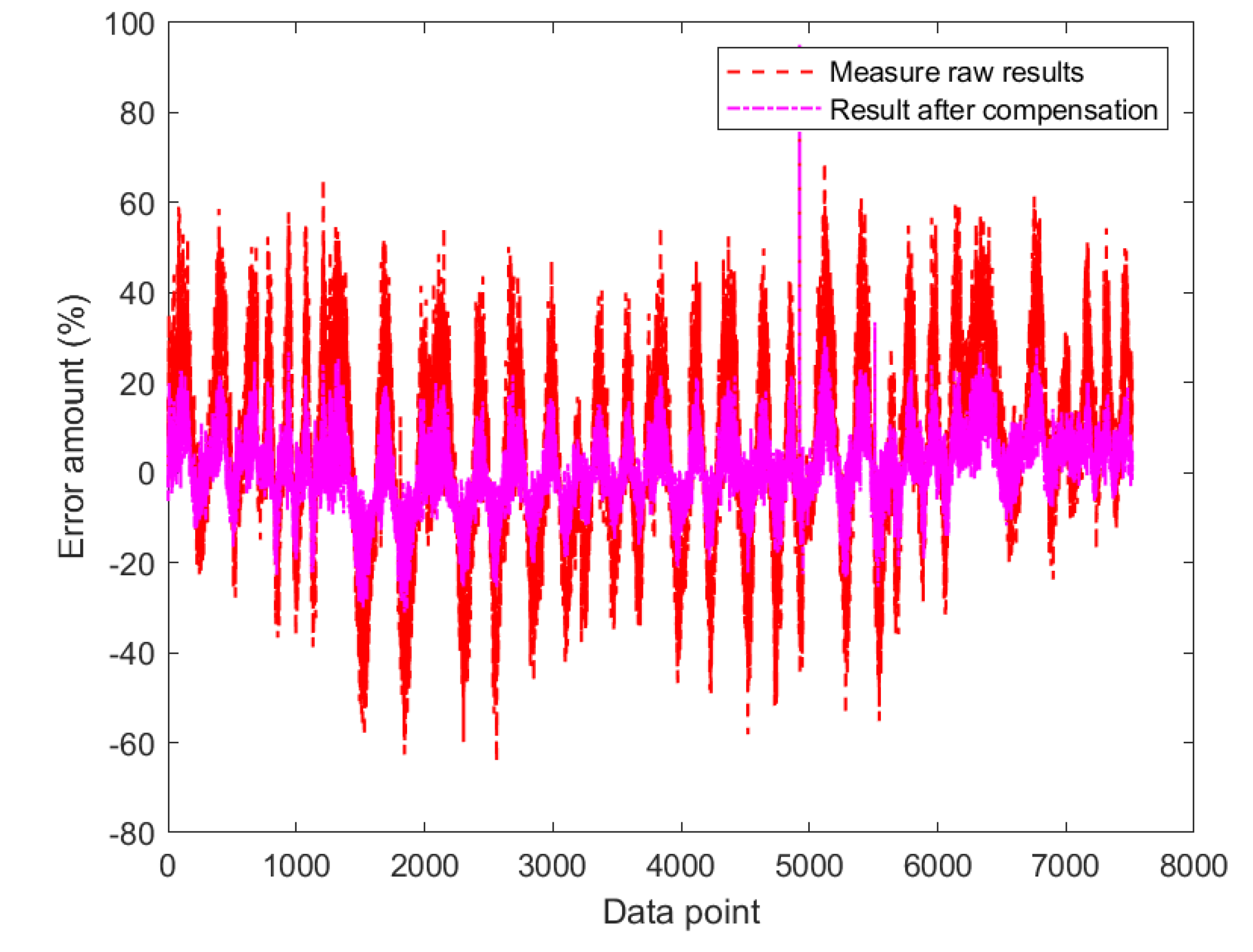
6.2. Compensation Algorithm Verification
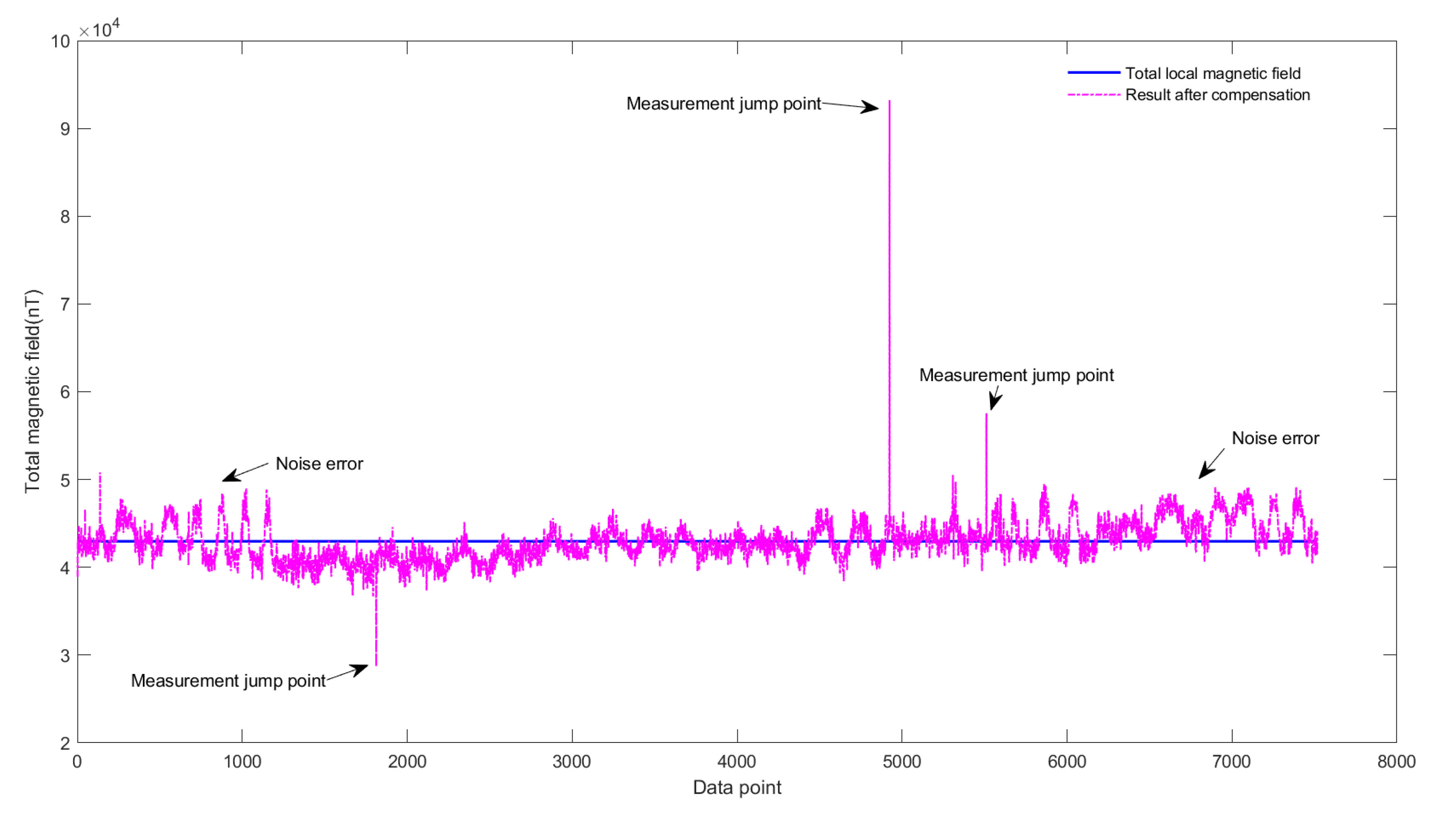
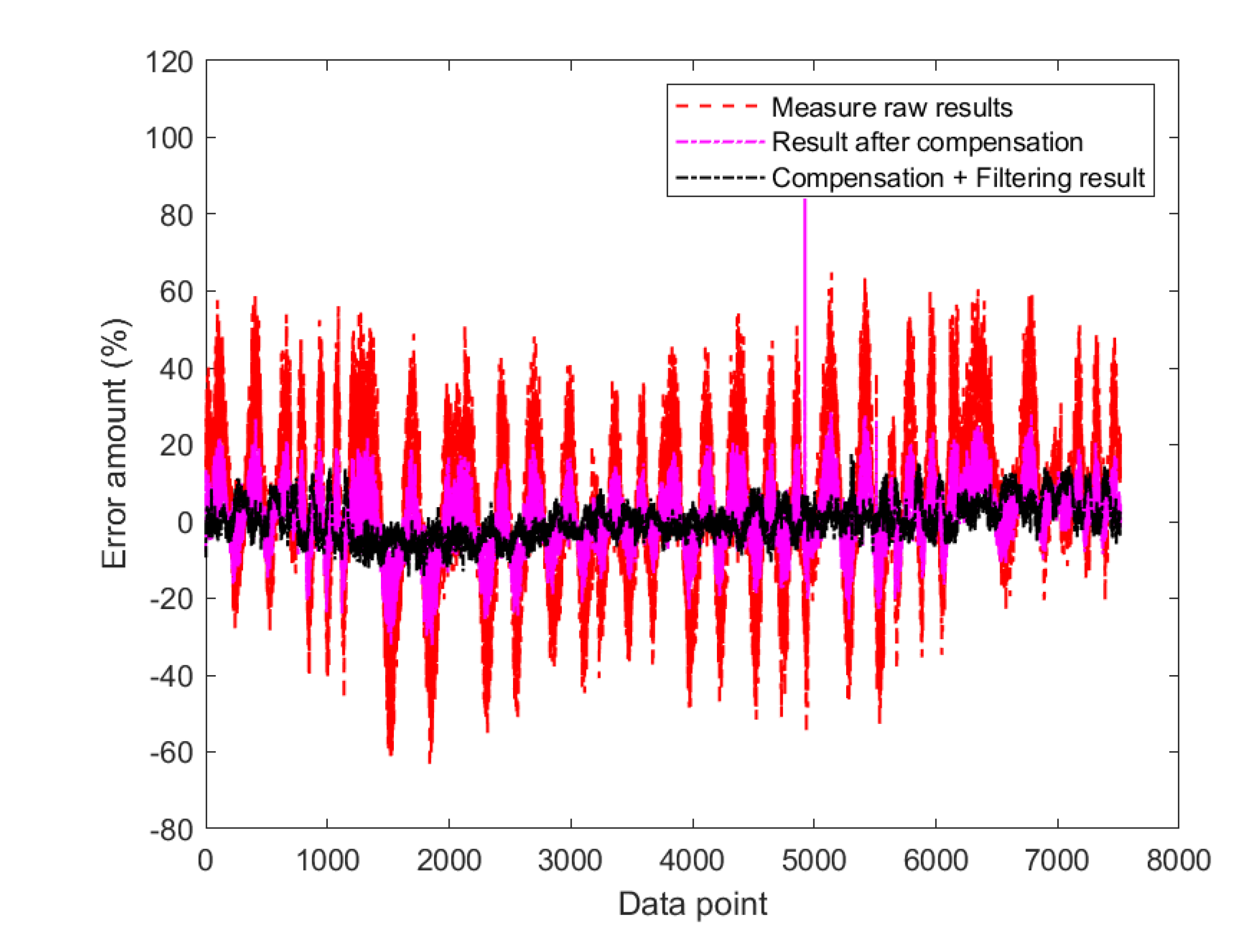
6.3. Kalman Filter Algorithm
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, Y.L.; Jiang, X. MEMS/Geomagnetism-based adaptive estimation algorithm of UAV heading and attitude. Sens. Microsyst. 2020, 39, 122–125. [Google Scholar]
- Ji, H.D.; Jiang, W.G. Simulation research on attitude calculation based on multi-MEMS sensor combination. Instrum. Technol. Sens. 2020, 08, 85–89. [Google Scholar]
- Liu, X.H.; Liu, X.X. UAV attitude calculation algorithm based on acceleration correction model. J. Northwest. Polytech. Univ. 2021, 39, 175–181. [Google Scholar] [CrossRef]
- Xu, T.T.; Zhao, B.X.; Luo, Y.Z. Attitude data fusion algorithm of MEMS sensor components based on complementary-particle filter. Ordnance Ind. Autom. 2021, 40, 29–32. [Google Scholar]
- Yu, C.Y.; Zhang, Z. Spherical robot attitude calculation based on complementary filtering and particle filter fusion. Robot. J. 2021, 43, 340–349. [Google Scholar]
- An, L.L.; Wang, L.M.; Zhong, Y. A low-cost method for measuring speed and roll angle with a single-axis magnetic sensor. Ordnance Equip. Eng. J. 2020, 41, 1–4. [Google Scholar]
- Shao, W.P.; Sun, L.; Zhang, J.Y. A method for calculating the attitude of a rotating body based on a geomagnetic sensor. Sichuan Armamentary Eng. J. 2020, 41, 62–66. [Google Scholar]
- Miao, J.S.; Zhai, Y.C.; Gou, Q.X. Calculation method of missile rolling attitude based on satellite/geomagnetic combination. J. Missile Guid. 2014, 34, 63–66. [Google Scholar]
- Wu, Y.; Zou, D.; Liu, P. Dynamic Magnetometer Calibration and Alignment to Inertial Sensors by Kalman Filtering. IEEE Trans. Control. Syst. Technol. 2018, 26, 716–723. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Zhu, M.; Yu, W. An Efficient Method for Gyroscope-aided Full Magnetometer Calibration. IEEE Sens. J. 2019, 19, 6355–6361. [Google Scholar]
- Gao, L.Z.; Zhang, Y.Y.; Zhang, X.M. Fast calibration algorithm of installation angle for geomagnetic vector information measurement. Ordnance Equip. Eng. J. 2020, 4, 220–224. [Google Scholar]
- Cao, P.; Yu, J.Y.; Wang, X.M. Research on high-frequency measurement and system error calculation of high-rotation projectile roll angle based on the combination of geomagnetism and satellite. Acta Armamentari 2014, 35, 795–800. [Google Scholar]
- Liu, J.H.; Li, X.H. A universal vector compensation method for carrier interference in magnetometers. Chin. J. Sci. Instrum. 2020, 41, 112–118. [Google Scholar]
- Rigatos, G.; Busawon, K.; Pomares, J. Nonlinear optimal control for a spherical rolling robot. Int. J. Intell. Robot. Appl. 2019, 3, 221–237. [Google Scholar] [CrossRef]
- Indiveri, G.; Malerba, A. Complementary control for robots with actuator redundancy: An underwater vehicle application. Robot. Int. J. Inf. Educ. Res. Robot. Artif. Intell. 2017, 35, 206–223. [Google Scholar] [CrossRef]
- Hu, Z.; Gallacher, B. Extended Kalman filtering based parameter estimation and drift compensation for a MEMS rate integrating gyroscope. Sens. Actuators A. Phys. 2016, 250, 96–105. [Google Scholar] [CrossRef] [Green Version]
- Sabet, M.T.; Daniali, H.M.; Fathi, A.; Alizadeh, E. A Low-Cost Dead Reckoning Navigation System for an AUV Using a Robust AHRS: Design and Experimental Analysis. IEEE J. Ocean. Eng. 2017, 43, 927–939. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Latitude: | 31.8597691° |
| Longitude: | 117.2710962° |
| Height: | 273.00 m |
| Total field: | 42965 nT |
| Magnetic declination: | −4.932° |
| Magnetic inclination: | 48.453° |
| X component: | 28391 nT |
| Y component: | −2450 nT |
| Z component: | 32155 nT |
| Horizontal component: | 28496 nT |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, G.; Zhou, Z.; Li, J.; Shao, Z.; Dong, Y.; Guo, A. UAV Attitude Angle Measurement Method Based on Magnetometer-Satellite Positioning System. Appl. Sci. 2022, 12, 5947. https://doi.org/10.3390/app12125947
Qu G, Zhou Z, Li J, Shao Z, Dong Y, Guo A. UAV Attitude Angle Measurement Method Based on Magnetometer-Satellite Positioning System. Applied Sciences. 2022; 12(12):5947. https://doi.org/10.3390/app12125947
Chicago/Turabian StyleQu, Gaomin, Zhou Zhou, Jiguang Li, Zhuang Shao, Yanfei Dong, and An Guo. 2022. "UAV Attitude Angle Measurement Method Based on Magnetometer-Satellite Positioning System" Applied Sciences 12, no. 12: 5947. https://doi.org/10.3390/app12125947
APA StyleQu, G., Zhou, Z., Li, J., Shao, Z., Dong, Y., & Guo, A. (2022). UAV Attitude Angle Measurement Method Based on Magnetometer-Satellite Positioning System. Applied Sciences, 12(12), 5947. https://doi.org/10.3390/app12125947