
GNSS/INS Integration Based on Machine Learning LightGBM Model for Vehicle Navigation

 , and
, and 
Abstract
:1. Introduction
2. Introduction to LightGBM Machine Learning Model Based on PUA
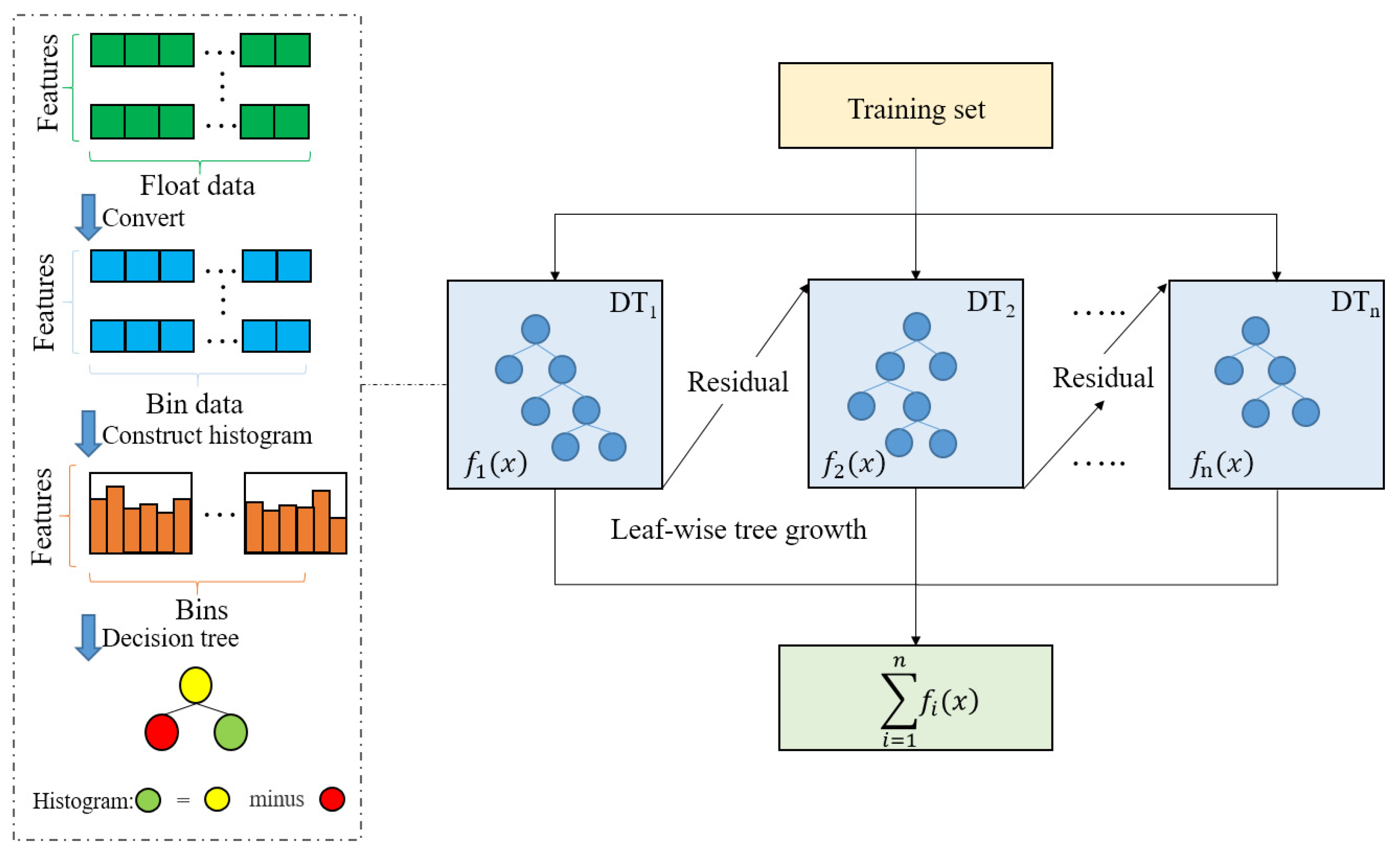
2.1. LightGBM Machine Learning Model
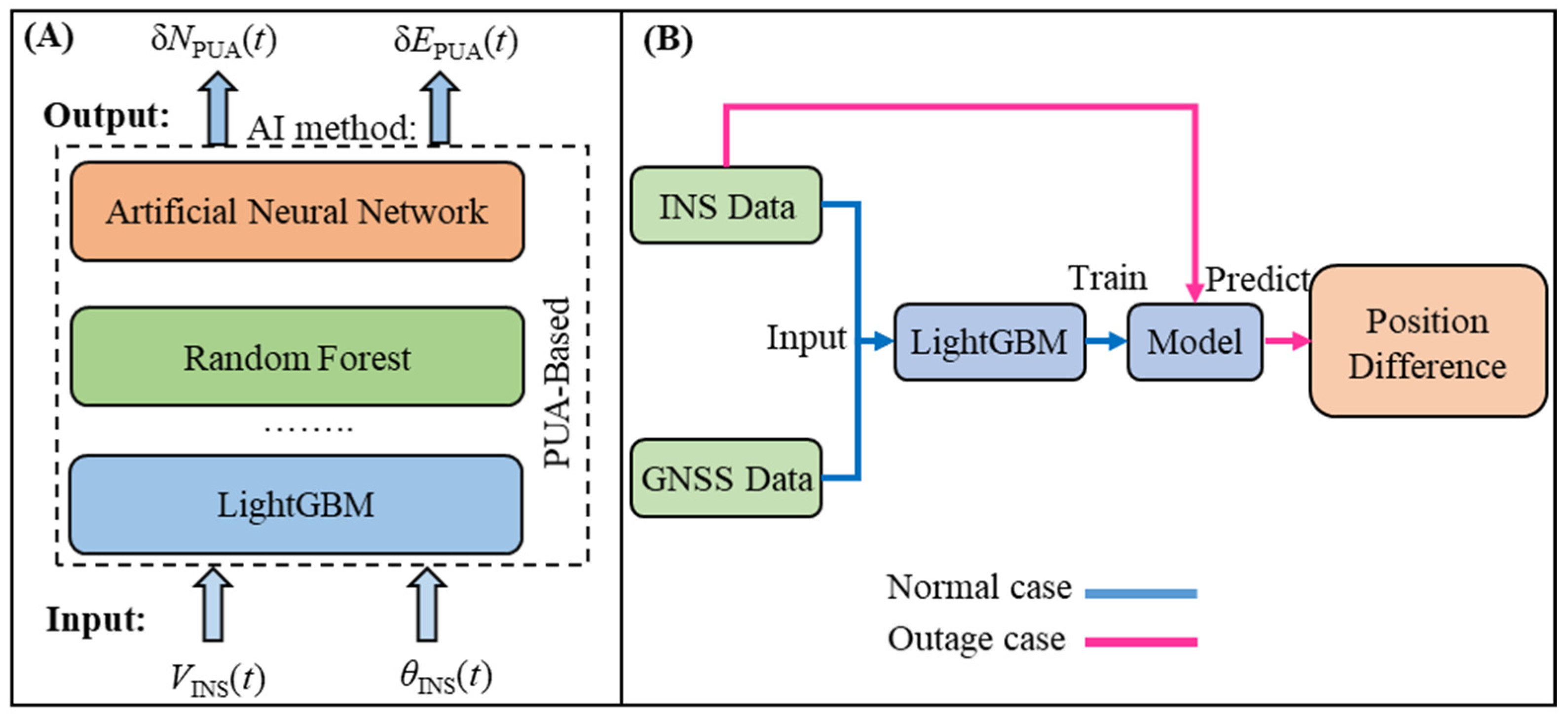
2.2. Position Update Architecture and PUA-LightGBM Model
3. Experimental Analysis and Method
3.1. Data Acquisition
3.2. Model Training
3.3. Model Predictions
4. Results and Discussion
4.1. Performance of the PUA-LightGBM Model
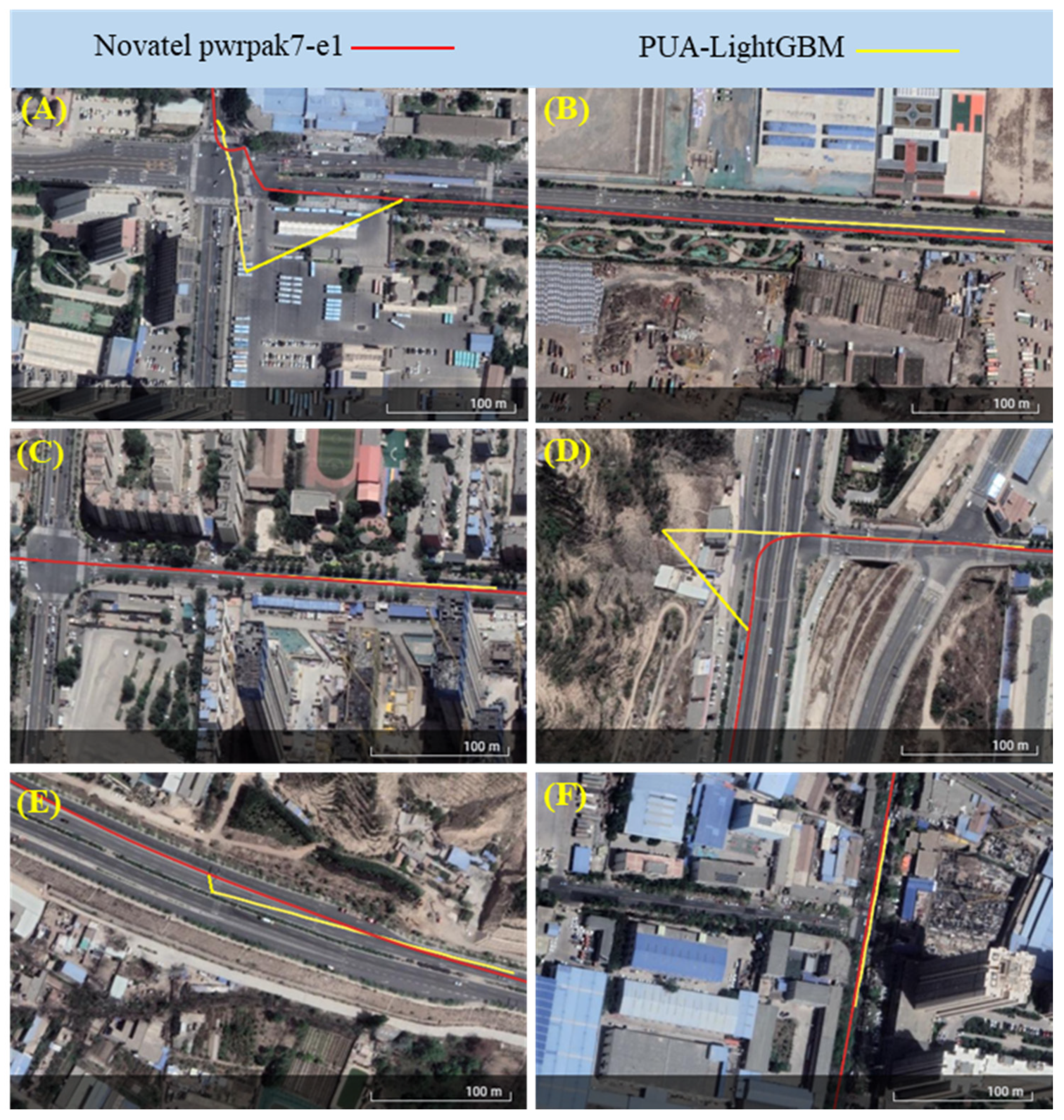
4.2. The Field Test Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vörös, F.; Gartner, G.; Peterson, M.P.; Kovács, B. What Does the Ideal Built-In Car Navigation System Look Like?—An Investigation in the Central European Region. Appl. Sci. 2022, 12, 3716. [Google Scholar] [CrossRef]
- Onyekpe, U.; Palade, V.; Kanarachos, S. Learning to localise automated vehicles in challenging environments using Inertial Navigation Systems (INS). Appl. Sci. 2021, 11, 1270. [Google Scholar] [CrossRef]
- Angrisano, A. GNSS/INS Integration Methods. Ph.D. Thesis, Universita’degli Studi di Napoli Parthenope, Naple, Italy, 2010; p. 21. [Google Scholar]
- Liu, H.; Nassar, S.; El-Sheimy, N. Two-filter smoothing for accurate INS/GPS land-vehicle navigation in urban centers. IEEE Trans. Veh. Technol. 2010, 59, 4256–4267. [Google Scholar] [CrossRef]
- Yang, L.; Li, Y.; Wu, Y.; Rizos, C. An enhanced MEMS-INS/GNSS integrated system with fault detection and exclusion capability for land vehicle navigation in urban areas. GPS Solut. 2014, 18, 593–603. [Google Scholar] [CrossRef]
- Sasani, S.; Asgari, J.; Amiri-Simkooei, A. Improving MEMS-IMU/GPS integrated systems for land vehicle navigation applications. GPS Solut. 2016, 20, 89–100. [Google Scholar] [CrossRef]
- Wang, M.; Wu, W.; He, X.; Li, Y.; Pan, X. Consistent ST-EKF for long distance land vehicle navigation based on SINS/OD integration. IEEE Trans. Veh. Technol. 2019, 68, 10525–10534. [Google Scholar] [CrossRef]
- Cui, B.; Wei, X.; Chen, X.; Li, J.; Li, L. On sigma-point update of cubature Kalman filter for GNSS/INS under GNSS-challenged environment. IEEE Trans. Veh. Technol. 2019, 68, 8671–8682. [Google Scholar] [CrossRef]
- Bijjahalli, S.; Sabatini, R. A high-integrity and low-cost navigation system for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 22, 356–369. [Google Scholar] [CrossRef]
- Chiang, K.-W.; Noureldin, A.; El-Sheimy, N. Multisensor integration using neuron computing for land-vehicle navigation. GPS Solut. 2003, 6, 209–218. [Google Scholar] [CrossRef]
- Aggarwal, P.; Bhatt, D.; Devabhaktuni, V.; Bhattacharya, P. Dempster Shafer neural network algorithm for land vehicle navigation application. Inf. Sci. 2013, 253, 26–33. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Eberts, M.D.; El-Shafie, A. Performance enhancement of MEMS-based INS/GPS integration for low-cost navigation applications. IEEE Trans. Veh. Technol. 2008, 58, 1077–1096. [Google Scholar] [CrossRef]
- Chiang, K.-W.; Huang, Y.-W. An intelligent navigator for seamless INS/GPS integrated land vehicle navigation applications. Appl. Soft Comput. 2008, 8, 722–733. [Google Scholar] [CrossRef]
- Yue, S.; Cong, L.; Qin, H.; Li, B.; Yao, J. A robust fusion methodology for MEMS-based land vehicle navigation in GNSS-challenged environments. IEEE Access 2020, 8, 44087–44099. [Google Scholar] [CrossRef]
- Liu, Y.; Luo, Q.; Zhou, Y. Deep Learning-Enabled Fusion to Bridge GPS Outages for INS/GPS Integrated Navigation. IEEE Sens. J. 2022, 22, 8974–8985. [Google Scholar] [CrossRef]
- Khankalantary, S.; Rafatnia, S.; Mohammadkhani, H. An adaptive constrained type-2 fuzzy Hammerstein neural network data fusion scheme for low-cost SINS/GNSS navigation system. Appl. Soft Comput. 2020, 86, 105917. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. Lightgbm: A highly efficient gradient boosting decision tree. In Proceedings of the Advances in Neural Information Processing Systems 30 (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- El-Sheimy, N.; Chiang, K.-W.; Noureldin, A. The utilization of artificial neural networks for multisensor system integration in navigation and positioning instruments. IEEE Trans. Instrum. Meas. 2006, 55, 1606–1615. [Google Scholar] [CrossRef]
- Adusumilli, S.; Bhatt, D.; Wang, H.; Bhattacharya, P.; Devabhaktuni, V. A low-cost INS/GPS integration methodology based on random forest regression. Expert Syst. Appl. 2013, 40, 4653–4659. [Google Scholar] [CrossRef]
- Bhatt, D.; Aggarwal, P.; Devabhaktuni, V.; Bhattacharya, P. A novel hybrid fusion algorithm to bridge the period of GPS outages using low-cost INS. Expert Syst. Appl. 2014, 41, 2166–2173. [Google Scholar] [CrossRef]
- Liang, W.; Luo, S.; Zhao, G.; Wu, H. Predicting hard rock pillar stability using GBDT, XGBoost, and LightGBM algorithms. Mathematics 2020, 8, 765. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, Q.; Ma, Q.; Yu, B. LightGBM-PPI: Predicting protein-protein interactions through LightGBM with multi-information fusion. Chemom. Intell. Lab. Syst. 2019, 191, 54–64. [Google Scholar] [CrossRef]
- Ju, Y.; Sun, G.; Chen, Q.; Zhang, M.; Zhu, H.; Rehman, M.U. A model combining convolutional neural network and LightGBM algorithm for ultra-short-term wind power forecasting. IEEE Access 2019, 7, 28309–28318. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value | Parameter Implication |
|---|---|---|
| learning_rate | 0.05 | Learning rate |
| num_leaves | 63 | The number of leaves in a tree |
| num_iterations | 300 | Number of basic learners |
| bagging_fraction | 0.8 | The fraction of data to be considered for each iteration. |
| feature_fraction | 0.9 | The fraction of features to be considered in each iteration. |
| Model Name | RMSE | R2 | Training Time (s) |
|---|---|---|---|
| PUA-LightGBM (δE) | 1.927 × 10−7 | 0.983 | 1.563 |
| PUA-LightGBM (δN) | 1.334 × 10−7 | 0.986 | 1.513 |
| PUA-RandomForest | 1.417 × 10−7 | 0.989 | 83.082 |
| Outage Road Segment | Road Length (m) | Average Absolute Positional Error (m) | Percentage Improvement (%) | |
|---|---|---|---|---|
| PUA-RandomForest | PUA-LightGBM | |||
| a | 191.18 | 61.85 | 59.71 | +3.5 |
| b | 222.58 | 22.11 | 21.90 | +0.95 |
| c | 215.24 | 17.43 | 17.55 | −0.69 |
| d | 246.46 | 32.84 | 33.52 | −2.1 |
| e | 231.65 | 23.33 | 24.48 | −4.9 |
| f | 146.88 | 22.03 | 21.92 | +0.50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Chen, G.; Si, Y.; Zhou, X.; Li, P.; Li, P.; Fadiji, T. GNSS/INS Integration Based on Machine Learning LightGBM Model for Vehicle Navigation. Appl. Sci. 2022, 12, 5565. https://doi.org/10.3390/app12115565
Li B, Chen G, Si Y, Zhou X, Li P, Li P, Fadiji T. GNSS/INS Integration Based on Machine Learning LightGBM Model for Vehicle Navigation. Applied Sciences. 2022; 12(11):5565. https://doi.org/10.3390/app12115565
Chicago/Turabian StyleLi, Bangxin, Guangwu Chen, Yongbo Si, Xin Zhou, Pengpeng Li, Peng Li, and Tobi Fadiji. 2022. "GNSS/INS Integration Based on Machine Learning LightGBM Model for Vehicle Navigation" Applied Sciences 12, no. 11: 5565. https://doi.org/10.3390/app12115565
APA StyleLi, B., Chen, G., Si, Y., Zhou, X., Li, P., Li, P., & Fadiji, T. (2022). GNSS/INS Integration Based on Machine Learning LightGBM Model for Vehicle Navigation. Applied Sciences, 12(11), 5565. https://doi.org/10.3390/app12115565