
Design and Mechanical Performance of a Fiber-Constrained Annular Flexible Actuator for Direct Ventricular Assist Devices


Abstract
:1. Introduction
2. Materials and Methods
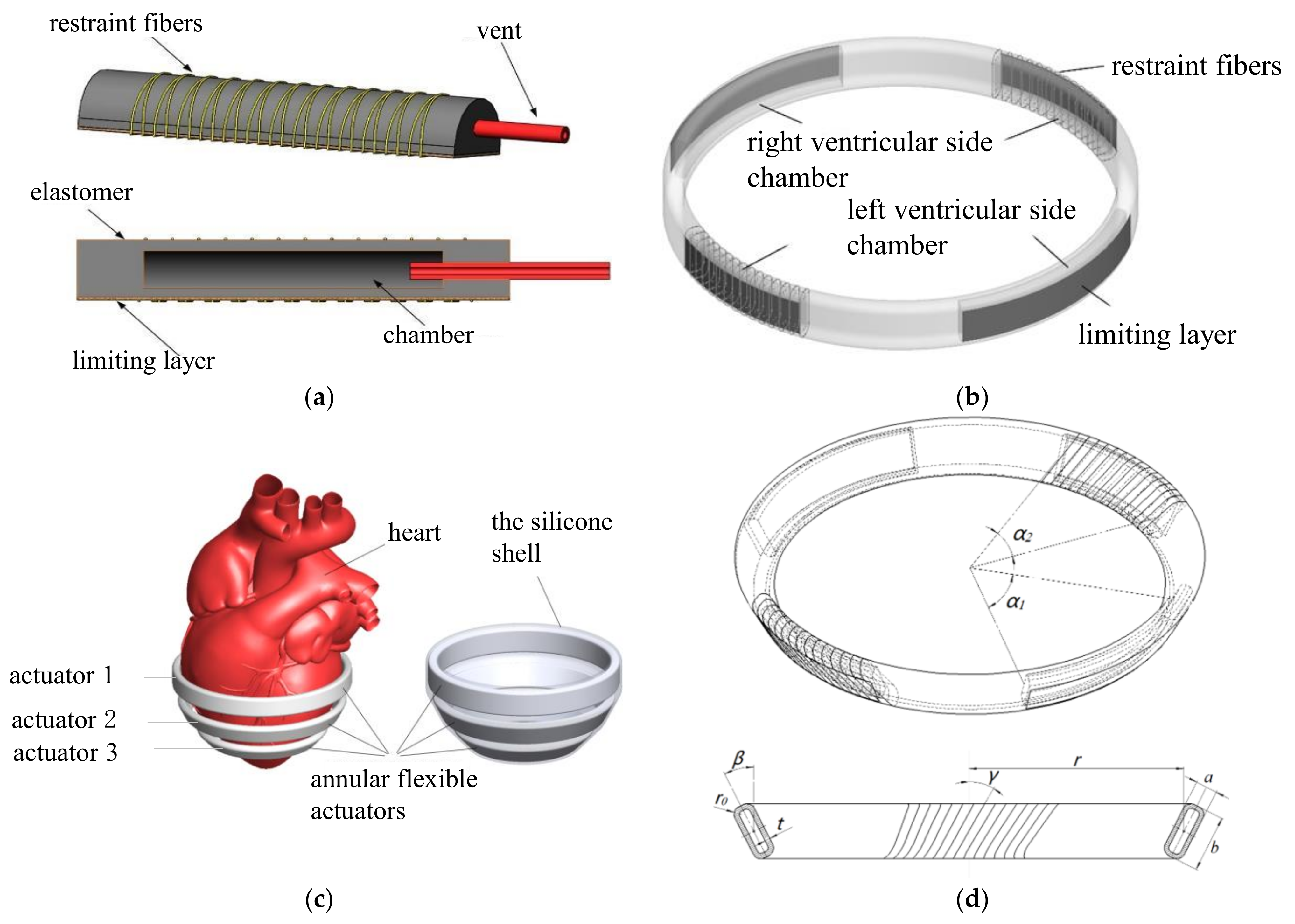
2.1. Structural Design of Fiber-Constrained Flexible Actuator
2.2. Preliminary Optimization Parameters for Fiber-Constrained Flexible Actuators
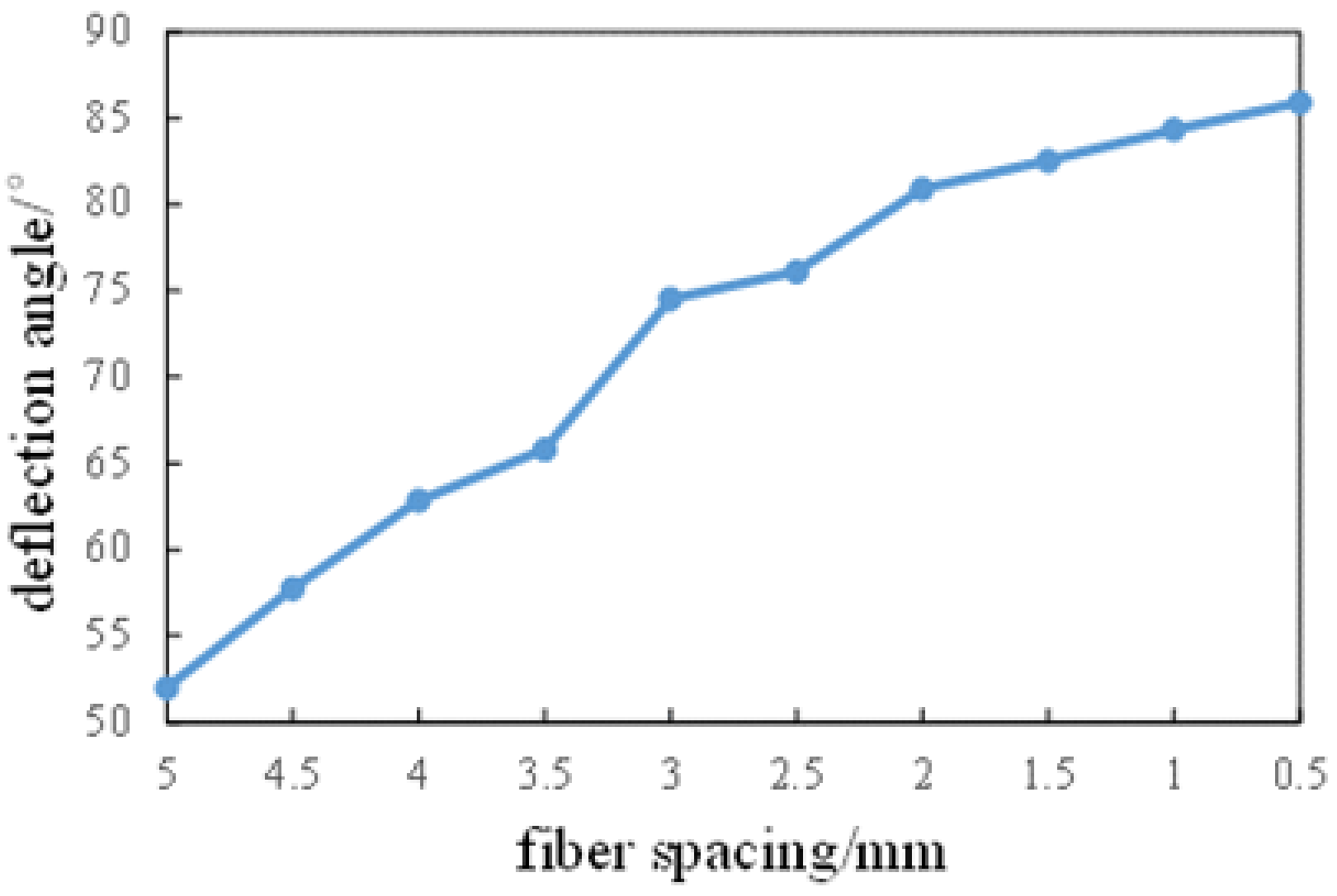
2.2.1. Preliminary Selection of the Fiber-Constrained Annular Flexible Actuator Fiber Spacing
2.2.2. Preliminary Selection of the Fiber-Constrained Annular Flexible Actuator Fiber Inclination
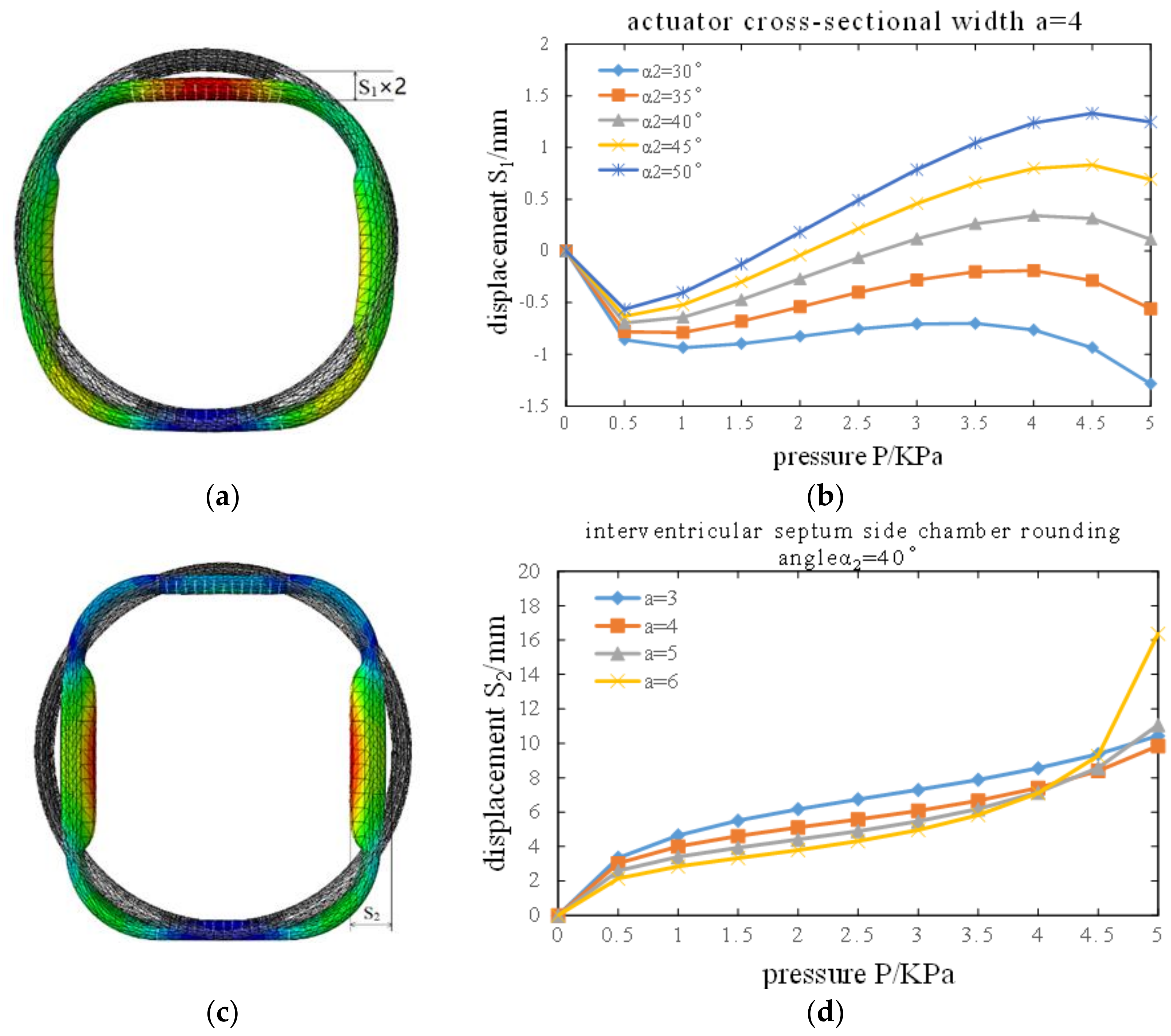
2.2.3. Preliminary Selection of the Fiber-Constrained Annular Flexible Actuator Interventricular Septum-Side Chamber Rounding Angle
2.2.4. Preliminary Selection of the Fiber-Constrained Annular Flexible Actuator Cross-Sectional Width
2.3. Materials

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Ecoflex00-30 |
|---|---|
| Forming stiffness | 00-30 HA |
| density | 1.07 g/cm3 |
| Young’s modulus | 68.9 Kpa |
| Poisson’s ratio | 0.499 |
| Tensile strength | 1378 Kpa |
| Fracture strain | 900% |
| Forming shrinkage | 3000 cps |
| μ | α | D |
|---|---|---|
| 2.4361 × 10−2 | 1.7139 | 3.2587 |
| 6.6703 × 10−5 | 7.0679 | 0 |
| 4.5381 × 10−4 | −3.3659 | 0 |
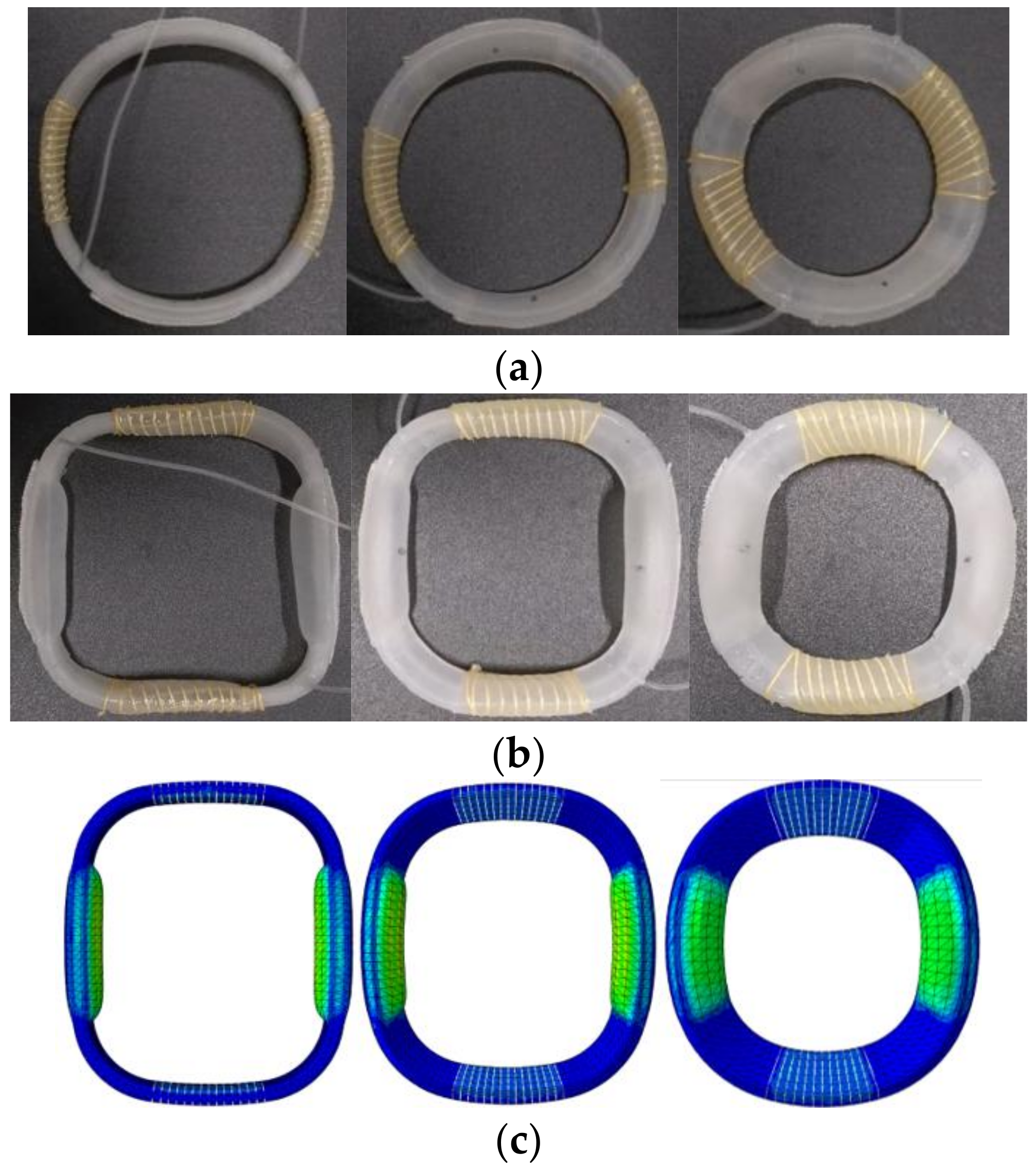
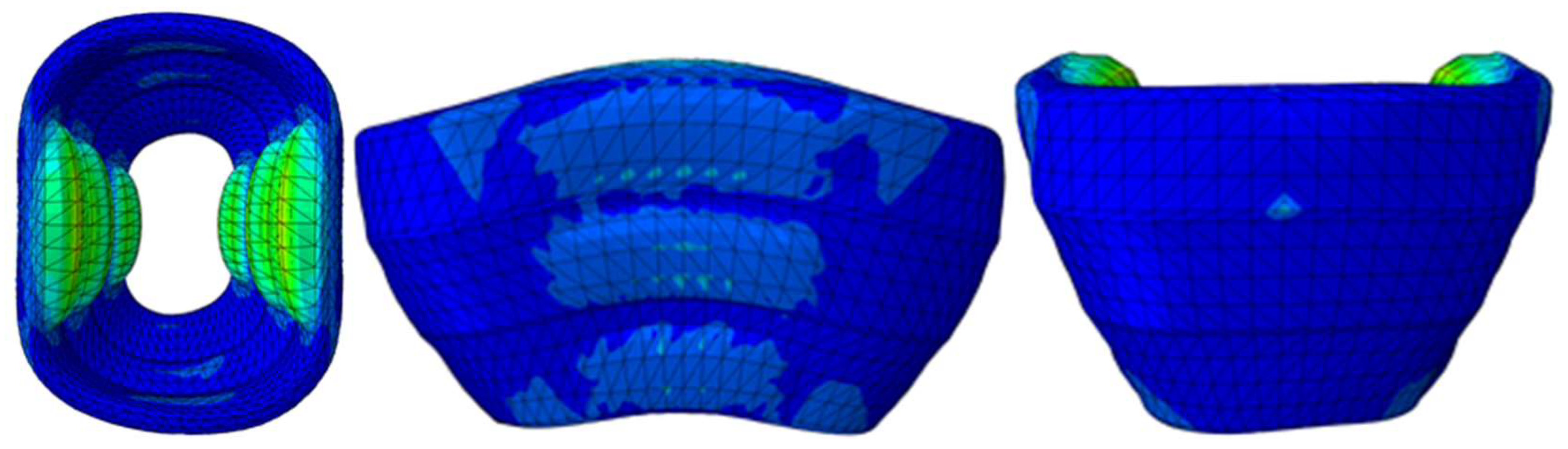
2.4. Finite Element Simulation Analysis of Fiber-Constrained Annular Flexible Actuator
2.5. Mechanical Performance Test Experiment of the Fiber-Constrained Annular Flexible Actuator
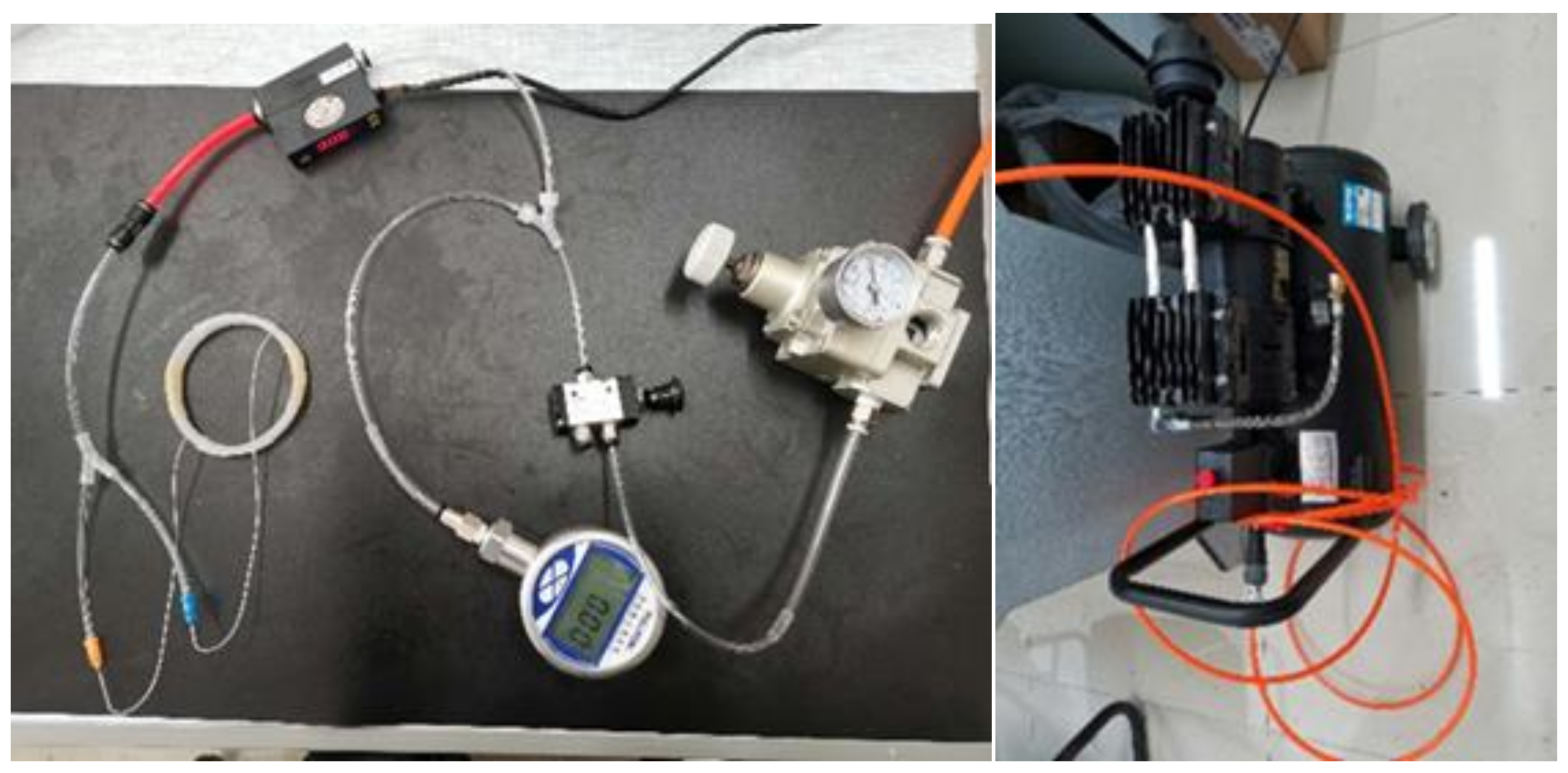
2.5.1. A Pneumatic Experiment Platform Was Built
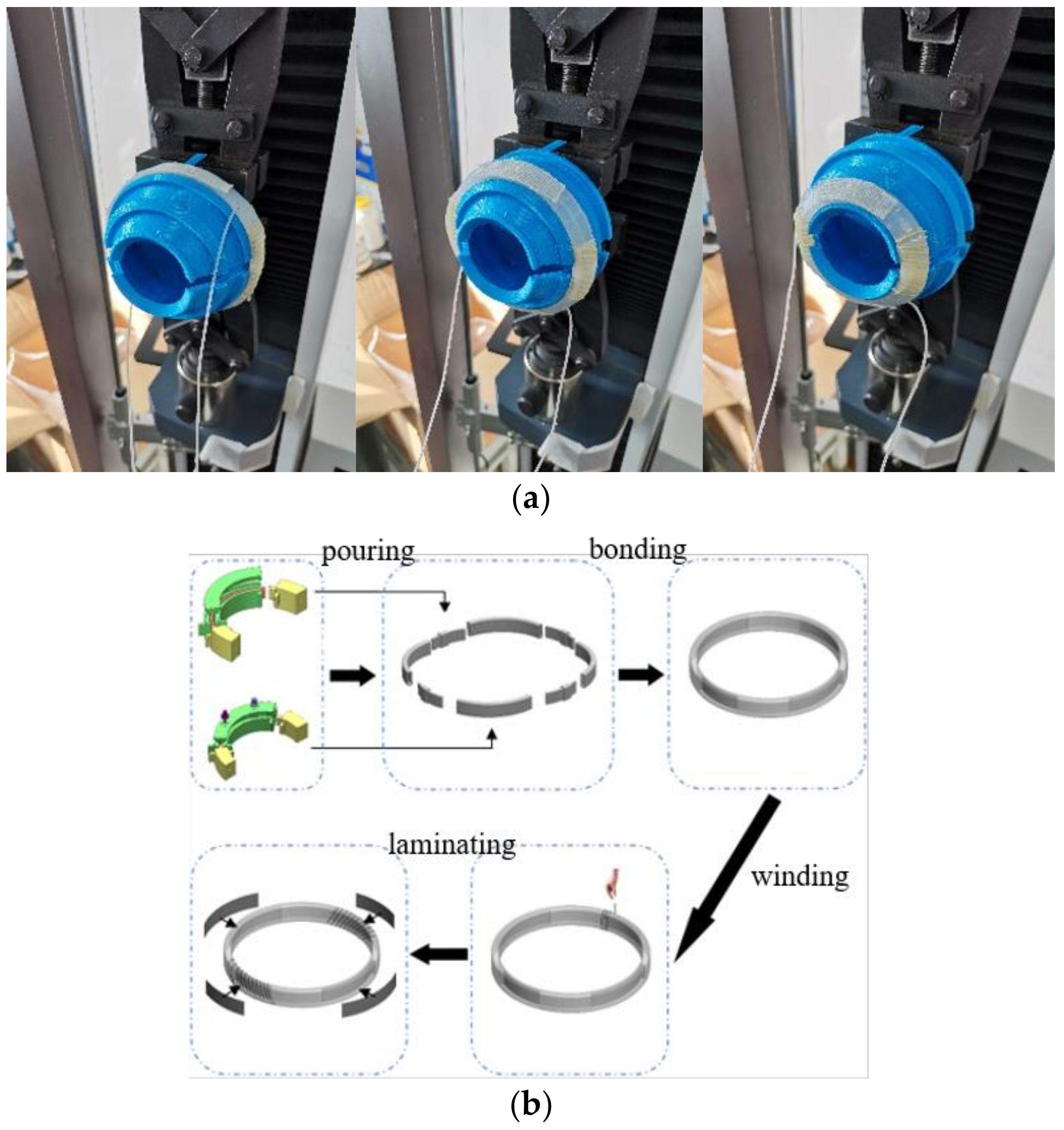
2.5.2. Fabrication of the Fiber-Constrained Annular Flexible Actuator
2.5.3. Mechanical Performance Tests
2.6. Statistical Analysis
3. Results
3.1. Optimization of Structural Parameters for Fiber-Constrained Annular Flexible Actuators
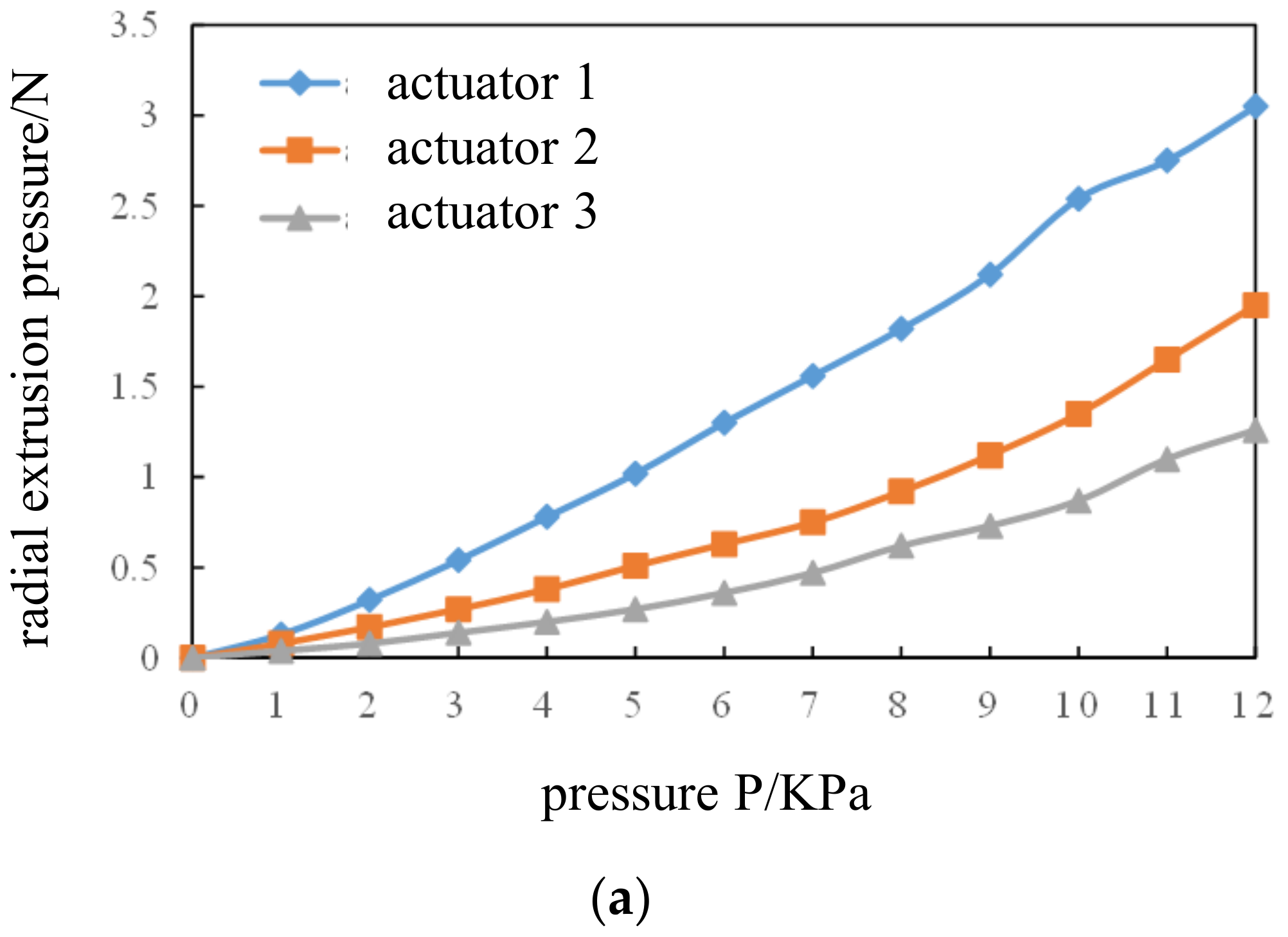
3.2. Displacement and Output Force Testing of Fiber-Constrained Annular Flexible Actuators
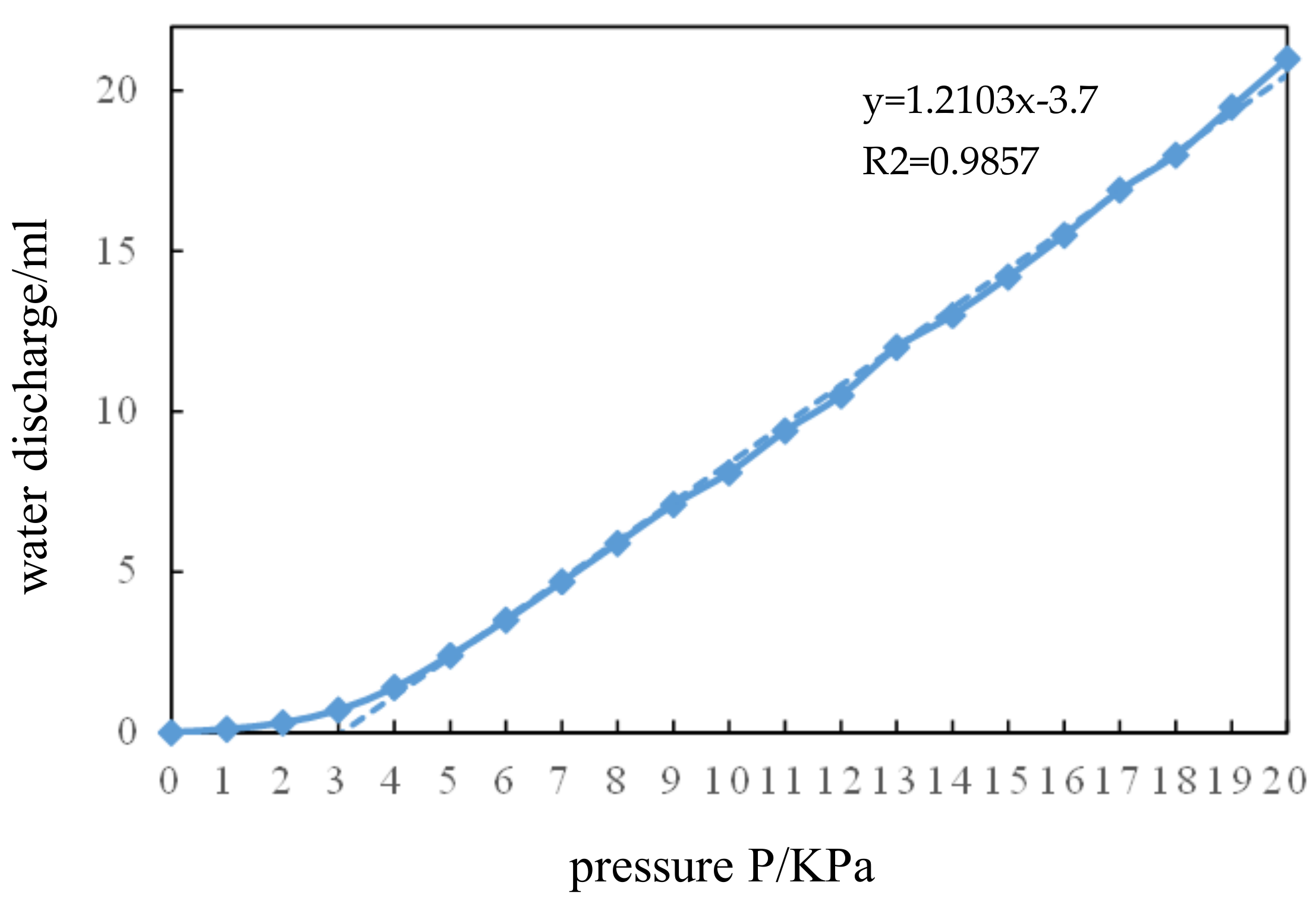
3.3. Direct Ventricular Assist Device Performance Testing
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Anstadt, G.L.; Schiff, P.; Baue, A.E. Prolonged circulatory support by direct mechanical ventricular assistance. ASAIO J. 1966, 12, 72–79. [Google Scholar]
- Wu, S.; Yang, M.; Huang, H.; Li, H. Design and in vitro testing of a non-blood contact pneumatic ventricular assist device. Chin. J. Med. Instrum. 2011, 35, 398–401. [Google Scholar]
- Liao, H.; Yang, M.; Zhuang, X.; Huang, H. ECG QRS wave detection and ventricular assist device control system design. J. Biomed. Eng. 2013, 30, 617–622. [Google Scholar]
- Roche, E.T.; Horvath, M.A.; Wamala, I.; Alazmani, A.; Song, S.; Whyte, W.; Machaidze, Z.; Payne, C.J.; Weaver, J.C.; Fishbein, G.; et al. Soft robotic sleeve supports heart function. Sci. Transl. Med. 2017, 9, eaaf3925. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Firouzeh, A.; Salerno, M.; Paik, J. Soft pneumatic actuator with adjustable stiffness layers for multi-dof actuation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September 2015–2 October 2015. [Google Scholar]
- Suzumori, K.; Iikura, S.; Tanaka, H. Flexible microactuator for miniature robots. In Proceedings of the an Investigation of Micro Structures, Sensors, Actuators, Machines and Robots, Nara, Japan, 30 January 1991; pp. 204–209. [Google Scholar]
- Elsayed, Y.; Lekakou, C.; Geng, T.; Saaj, C.M. Design optimization of soft silicone pneumatic actuators using finite element analysis. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besancon, France, 8–11 July 2014. [Google Scholar]
- Wei, Q. ABAQUS 6.14 Super Learning Manual; People’s Posts and Telecommunications Press: Beijing, China, 2016. [Google Scholar]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.B.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of soft fiber-reinforced bending actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef] [Green Version]
- Elsayed, Y.; Vincensi, A.; Lekakou, C.; Geng, T.; Saaj, C.M.; Ranzani, T.; Cianchetti, M.; Menciassi, A. Finite Element Analysis and Design Optimisation of a Pneumatically Actuating Silicone Module for Robotic Surgery Applications. Soft Robot 2014, 1, 255–262. [Google Scholar] [CrossRef] [Green Version]
- Arruda, E.M.; Boyce, M.C. A three-dimensional constitutive model for the large stretch behavior of rubber elastic materials. J. Mech. Phys. Solids 1993, 41, 389–412. [Google Scholar] [CrossRef] [Green Version]
- Moseley, P.; Florez, J.M.; Sonar, H.A.; Agarwal, G.; Curtin, W.; Paik, J. Modeling, Design, and Development of Soft Pneumatic Actuators with Finite Element Method. Adv. Eng. Mater. 2016, 18, 978–988. [Google Scholar] [CrossRef]
- Sun, Y.; Song, Y.S.; Paik, J. Characterization of silicone rubber based soft pneumatic actuators. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–8 November 2013. [Google Scholar]
- Shishido, T.; Sugimachi, M.; Kawaguchi, O. Special communication. Am. J. Physiol. Heart Circ. Physiol. 1998, 274, 1404–1415. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Xi, X.; Cheng, L.; Li, J.; Dong, W.; Chen, Y.; Zhi, G. MRI study of left ventricular long-axis myocardial strain characteristics in normal young people. Chin. J. Med. Imaging 2018, 26, 258–263. [Google Scholar]
- Cerqueira, M.D.; Weissman, N.J.; Dilsizian, V.; Jacobs, A.K.; Kaul, S.; Laskey, W.K.; Pennell, D.J.; Rumberger, J.A.; Ryan, T.; Verani, M.S.; et al. Standardized myocardial segmentation and nomenclature for tomographic imaging of the heart: A statement for healthcare professionals from the Cardiac Imaging Committee of the Council on Clinical Cardiology of the American Heart Association. J. Nucl. Cardiol. 2002, 105, 240–245. [Google Scholar] [CrossRef] [PubMed]


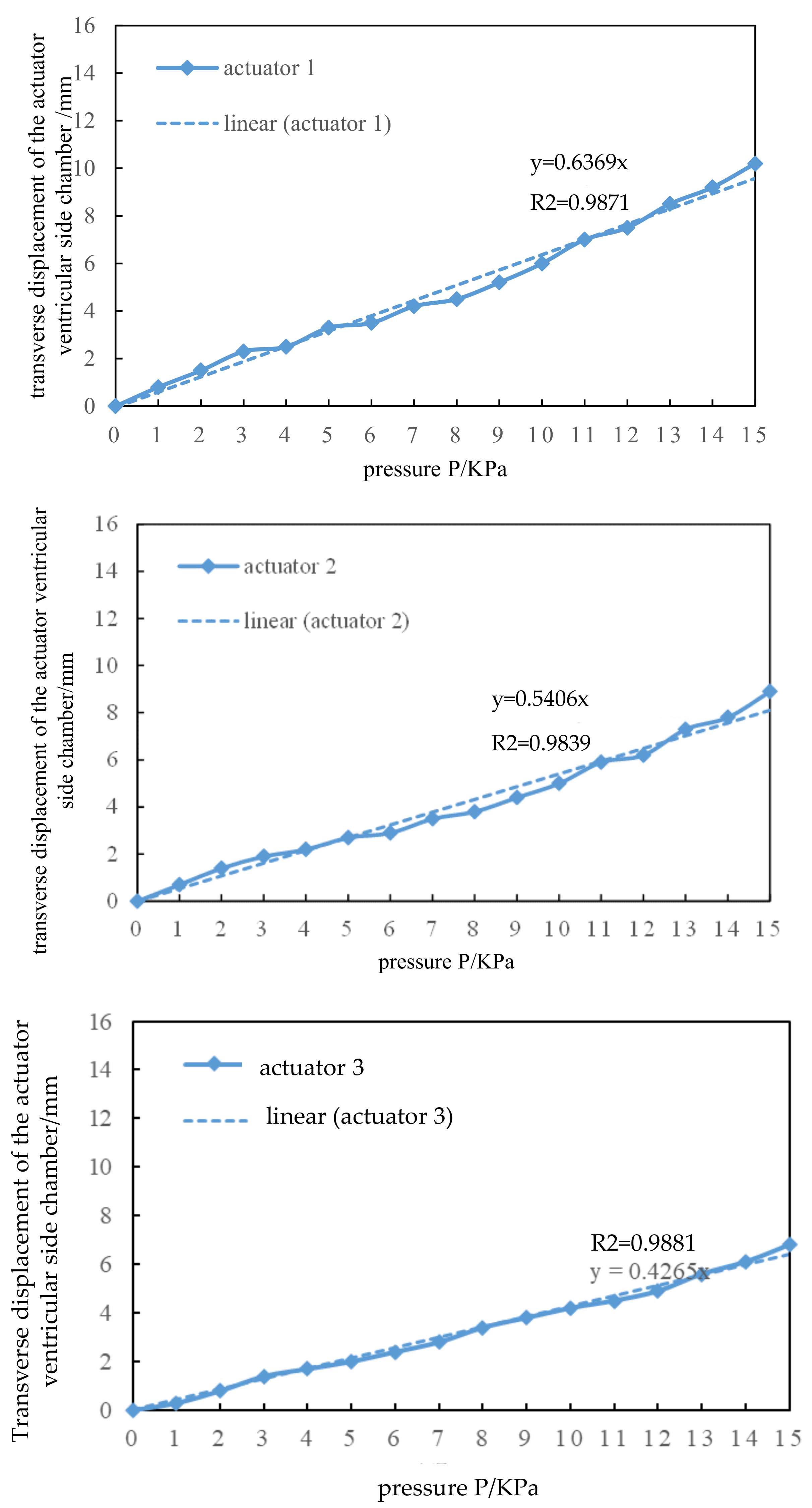
| Parameters | Actuator 1 | Actuator 2 | Actuator 3 |
|---|---|---|---|
| Ventricular chamber rounding angle α1/° | 58 | 58 | 58 |
| Actuator radius r/mm | 40 | 36 | 26 |
| Cross-sectional length b/mm | 11 | 11 | 11 |
| Airbag wall thickness t/mm | 1 | 1 | 1 |
| Airbag corner radius r0/mm | 1 | 1 | 1 |
| Actuator inclination β/° | 0 | 27 | 43.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yun, Z.; Mei, C.; Xu, K.; Tang, X.; Feng, Y. Design and Mechanical Performance of a Fiber-Constrained Annular Flexible Actuator for Direct Ventricular Assist Devices. Appl. Sci. 2022, 12, 5405. https://doi.org/10.3390/app12115405
Yun Z, Mei C, Xu K, Tang X, Feng Y. Design and Mechanical Performance of a Fiber-Constrained Annular Flexible Actuator for Direct Ventricular Assist Devices. Applied Sciences. 2022; 12(11):5405. https://doi.org/10.3390/app12115405
Chicago/Turabian StyleYun, Zhong, Chuanchuan Mei, Kang Xu, Xiaoyan Tang, and Yunhao Feng. 2022. "Design and Mechanical Performance of a Fiber-Constrained Annular Flexible Actuator for Direct Ventricular Assist Devices" Applied Sciences 12, no. 11: 5405. https://doi.org/10.3390/app12115405
APA StyleYun, Z., Mei, C., Xu, K., Tang, X., & Feng, Y. (2022). Design and Mechanical Performance of a Fiber-Constrained Annular Flexible Actuator for Direct Ventricular Assist Devices. Applied Sciences, 12(11), 5405. https://doi.org/10.3390/app12115405