
A Dynamic Hysteresis Model for TMR-Current Sensors Based on Probability Estimation of Hysteresis Operator and Its Switching Time

Abstract
:1. Introduction
2. Related Works
3. Methods
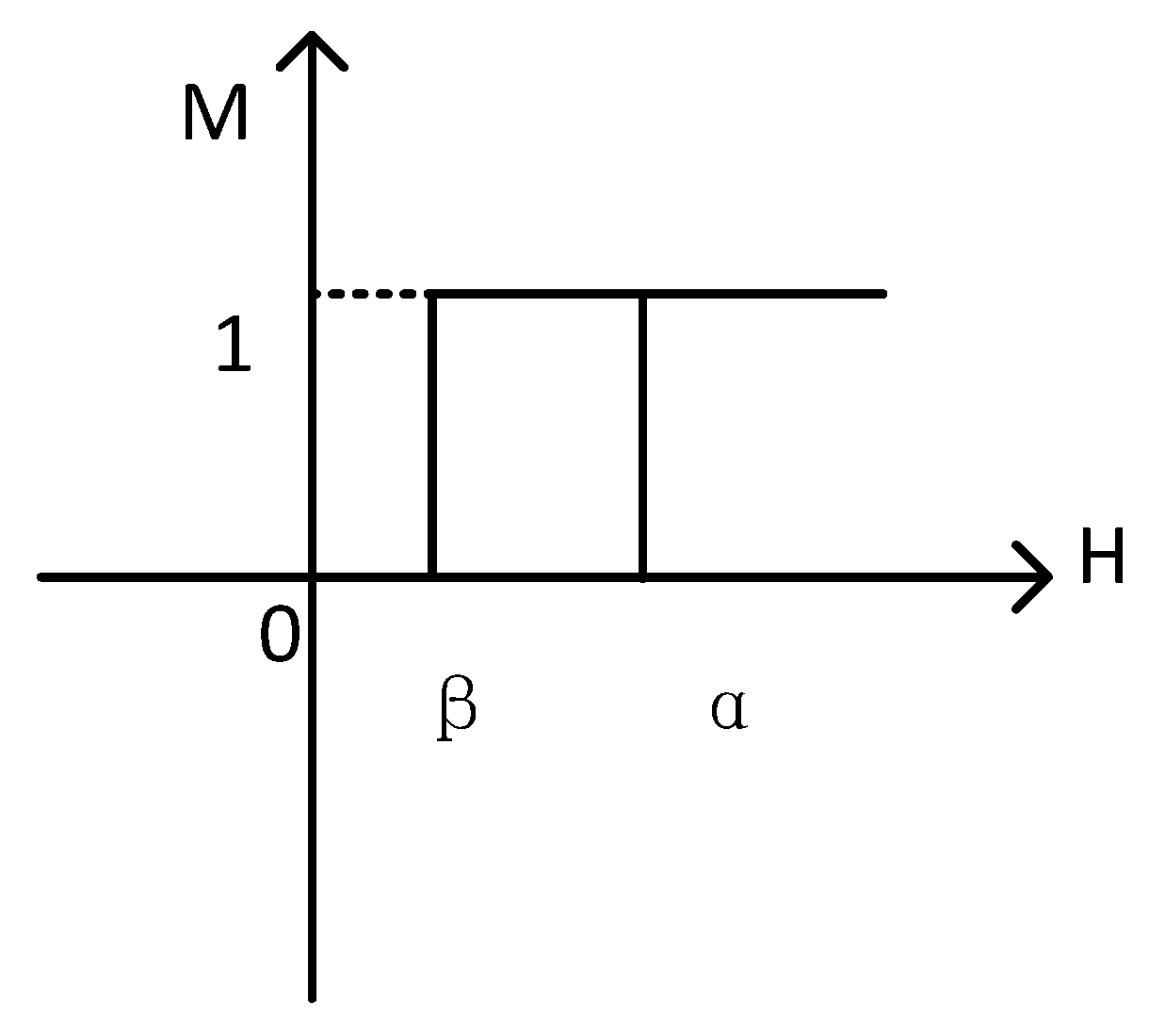
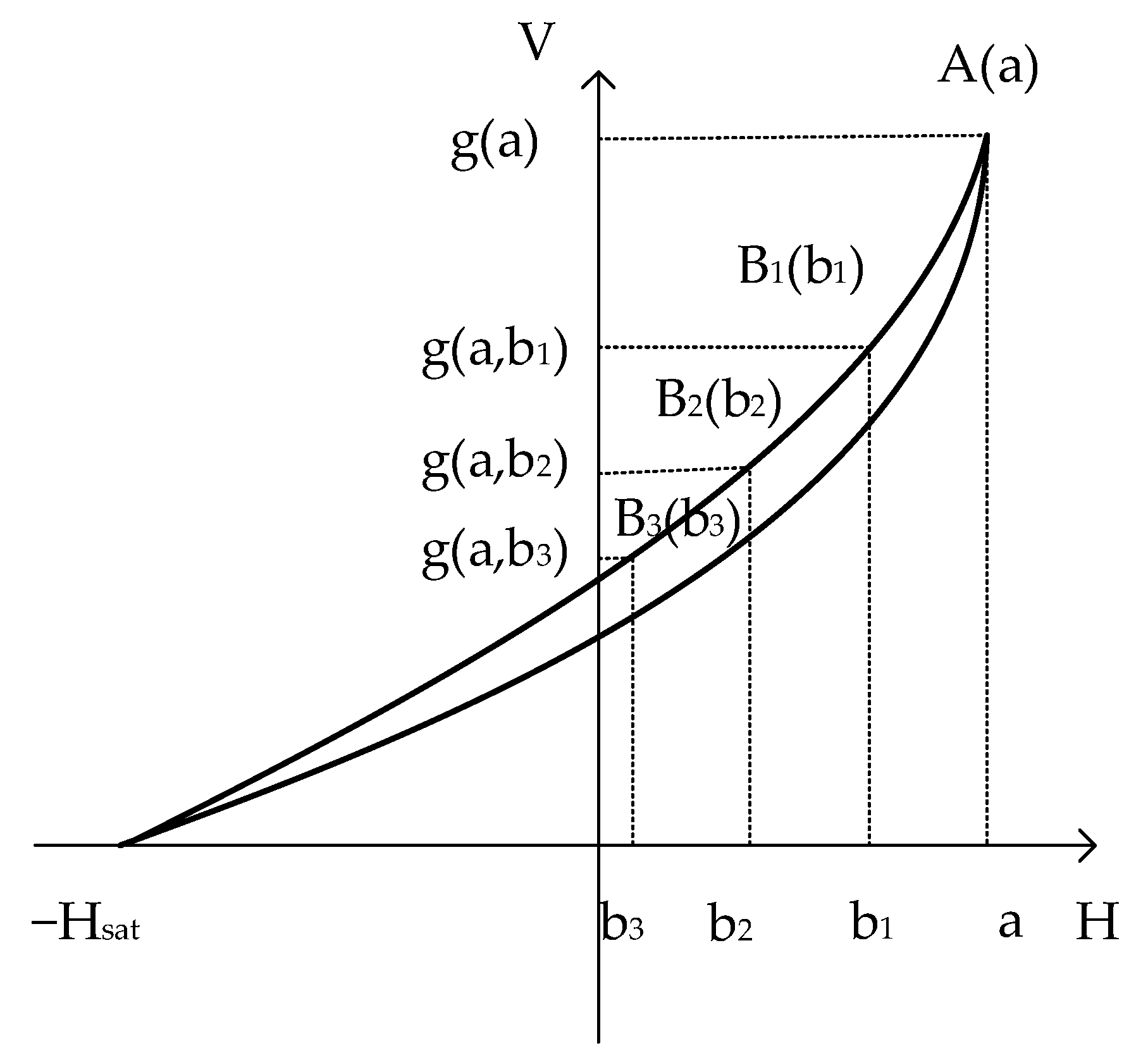
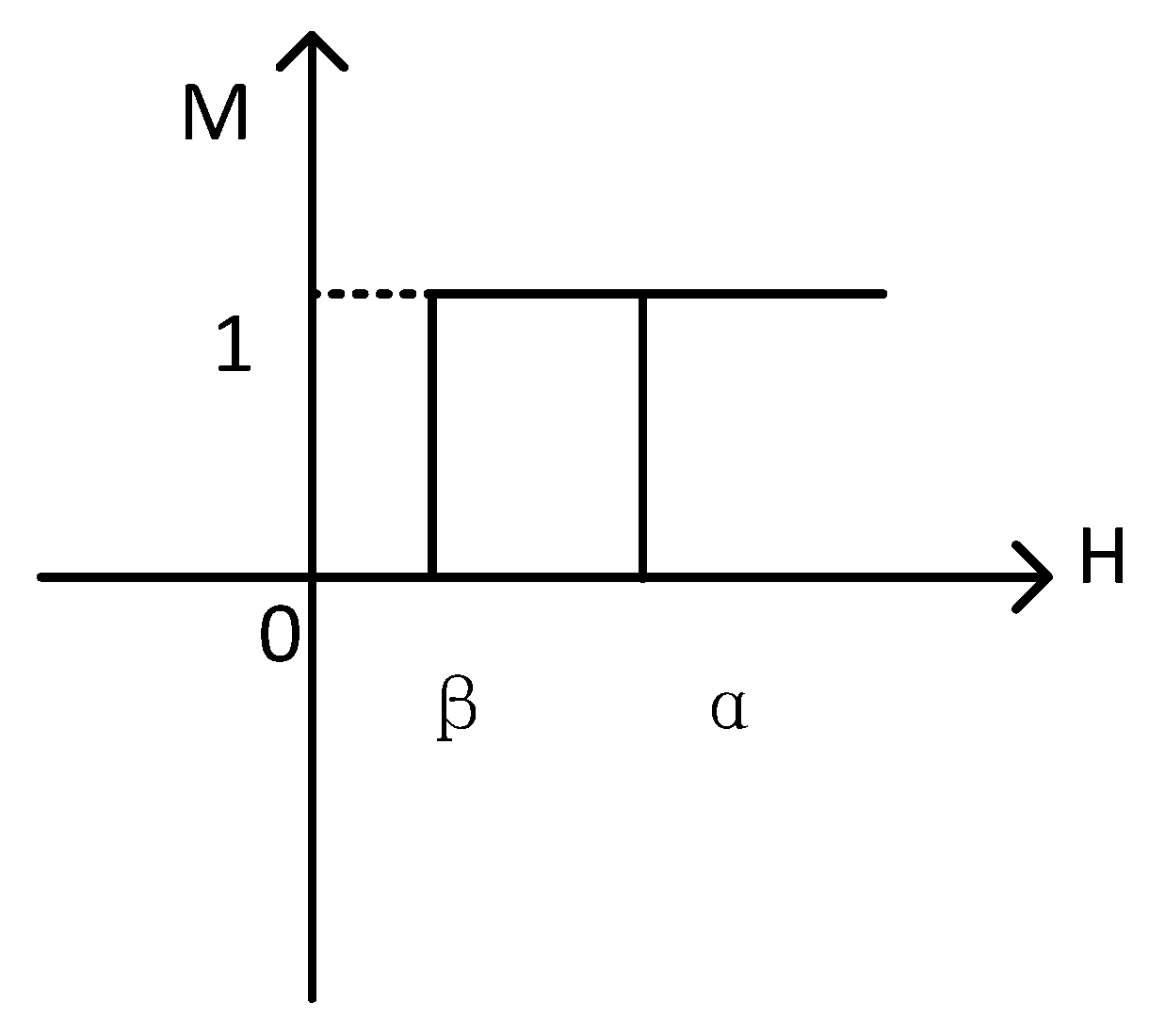
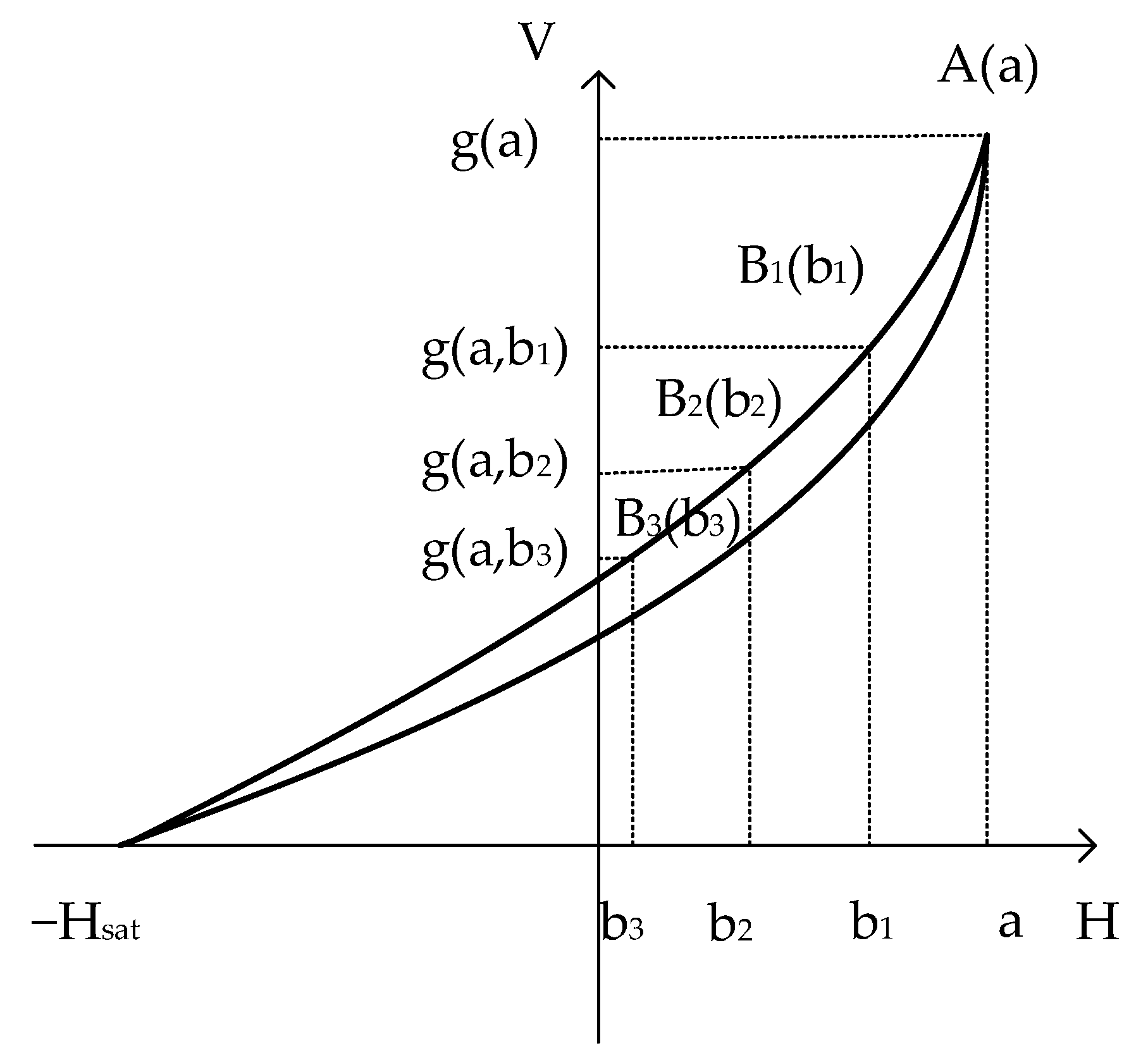
3.1. The Brief Introduction of the Static Model
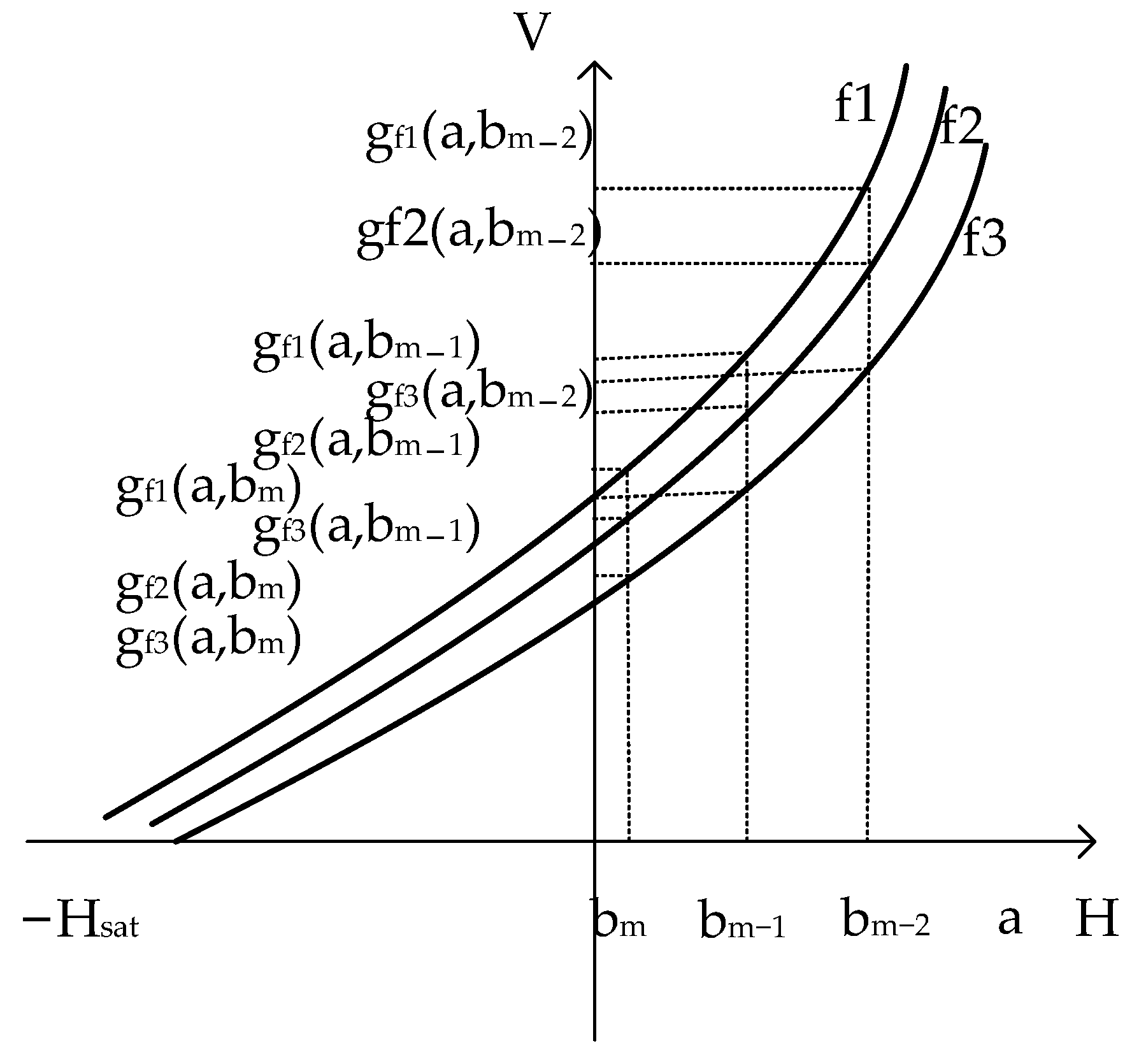
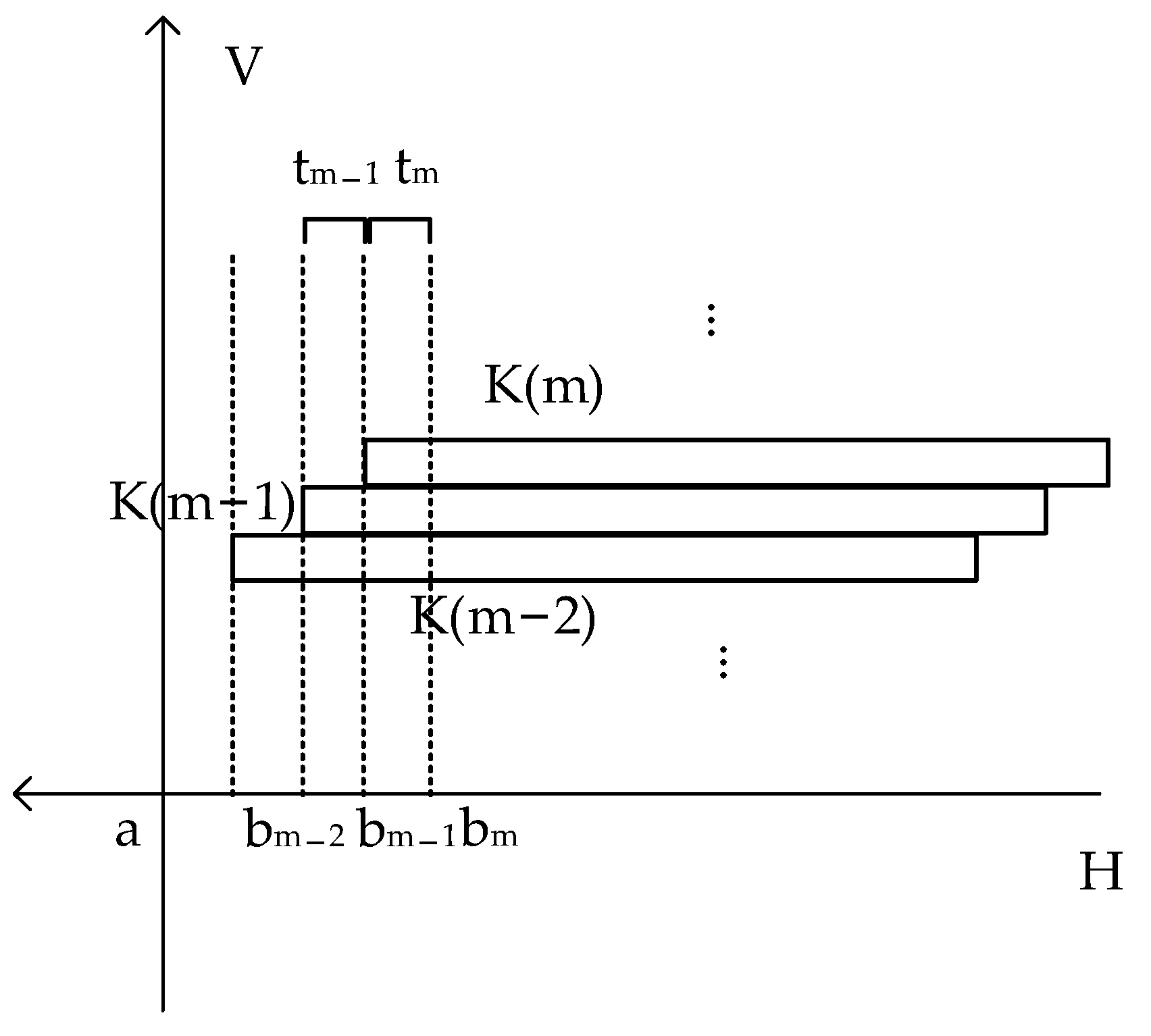
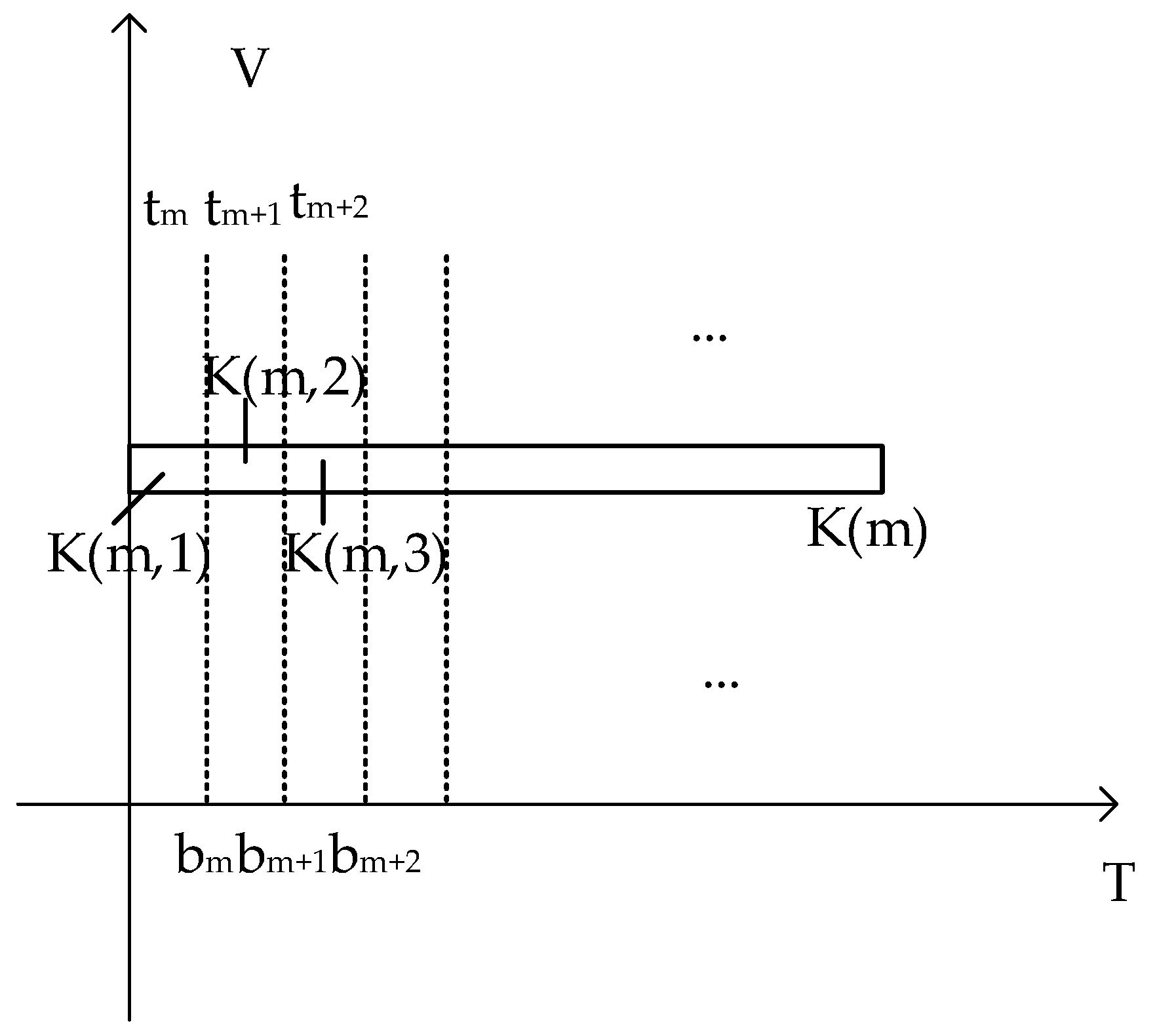
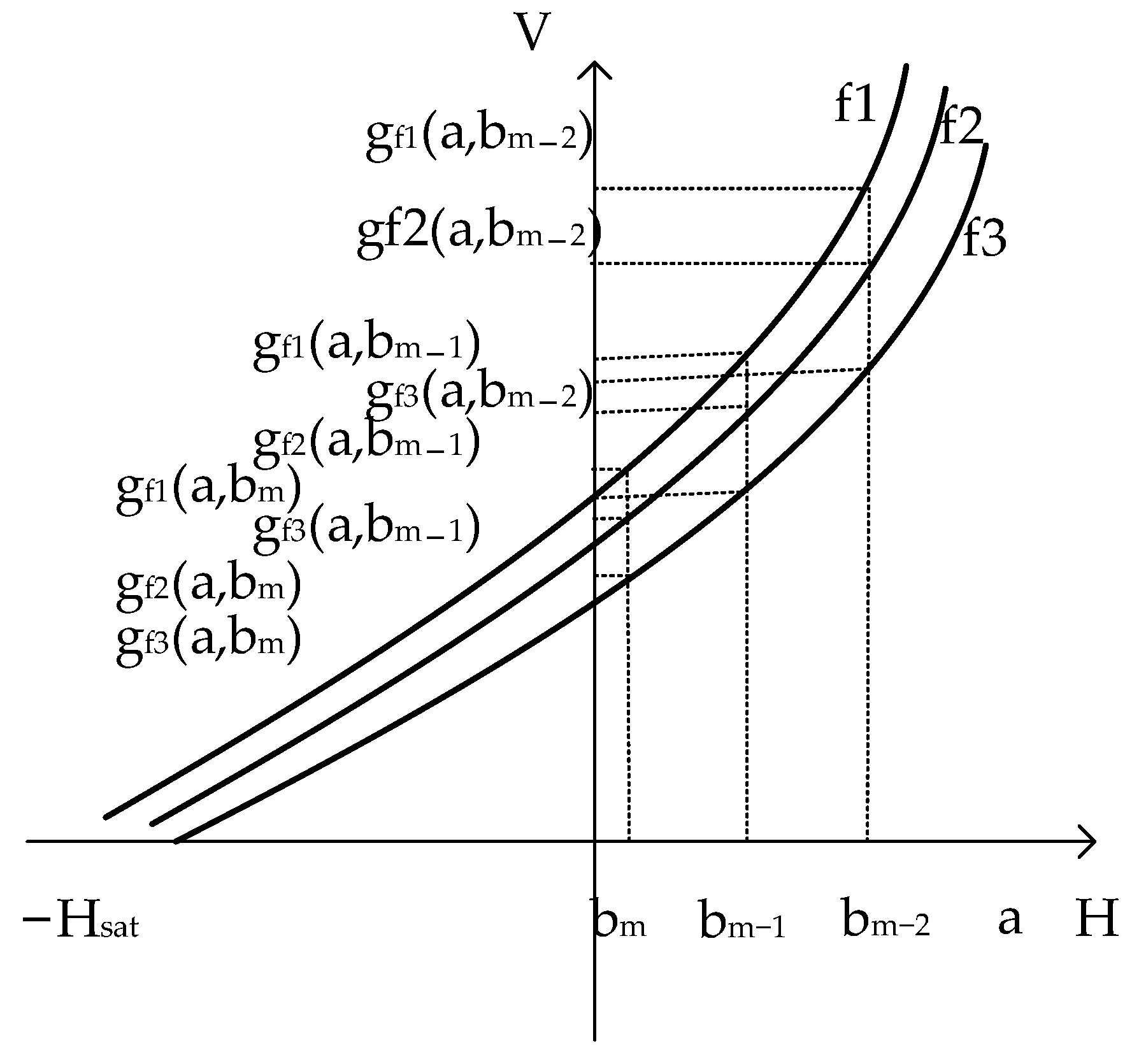
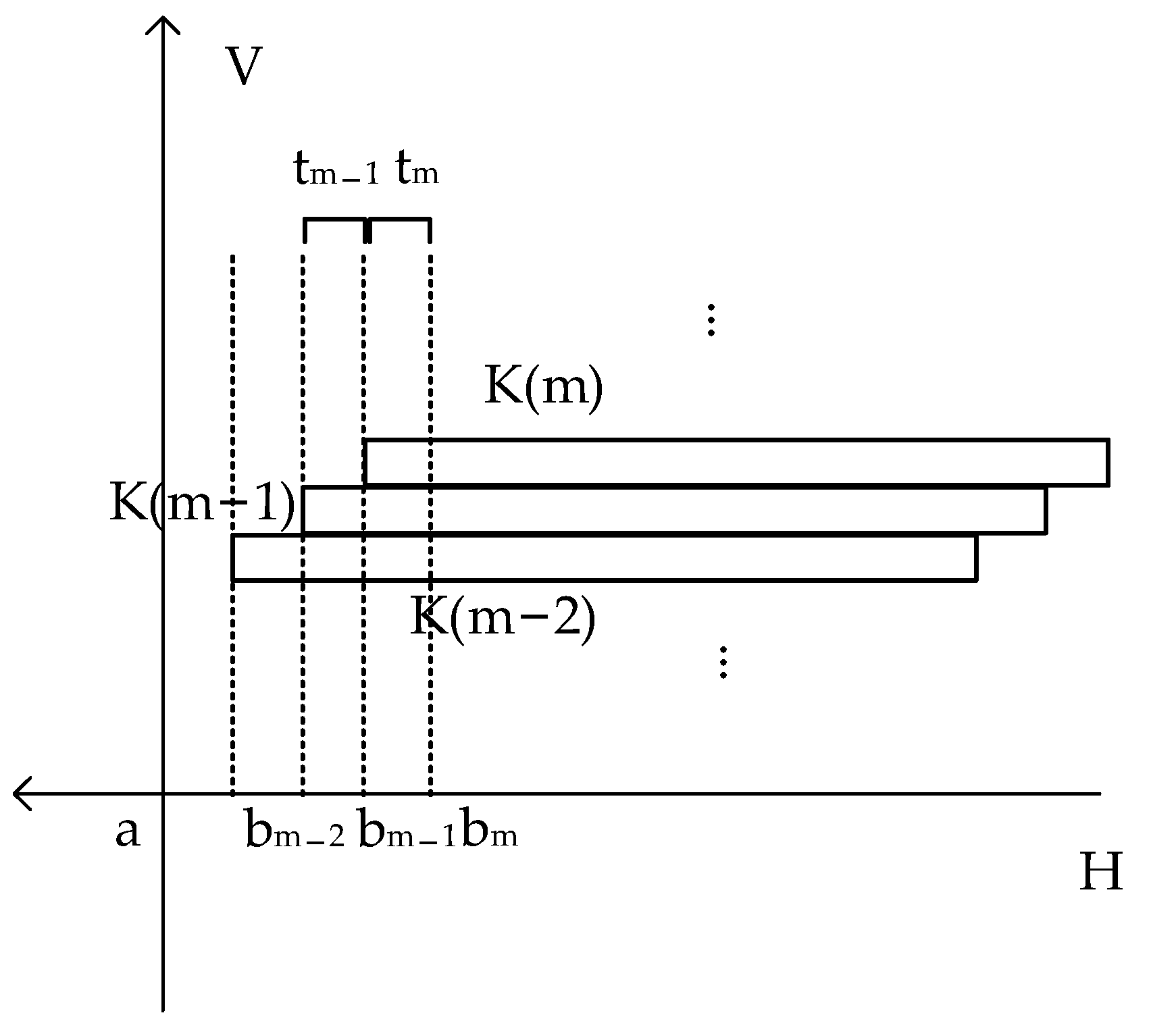
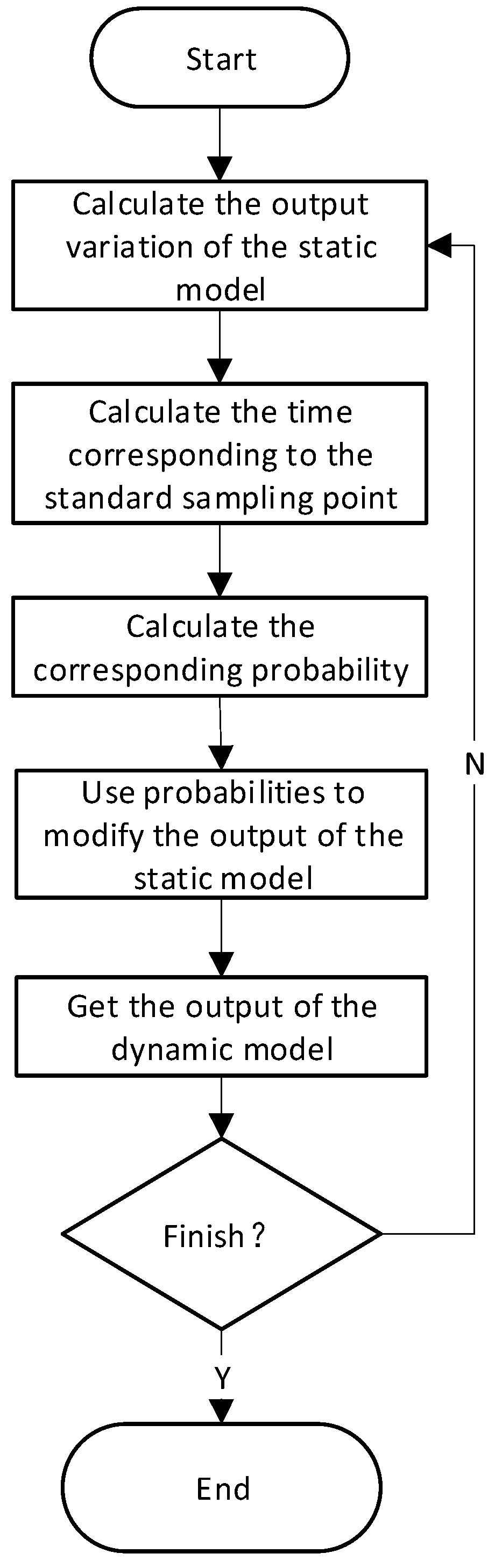
3.2. Introduction to Dynamic Hysteresis Model
4. Experiment
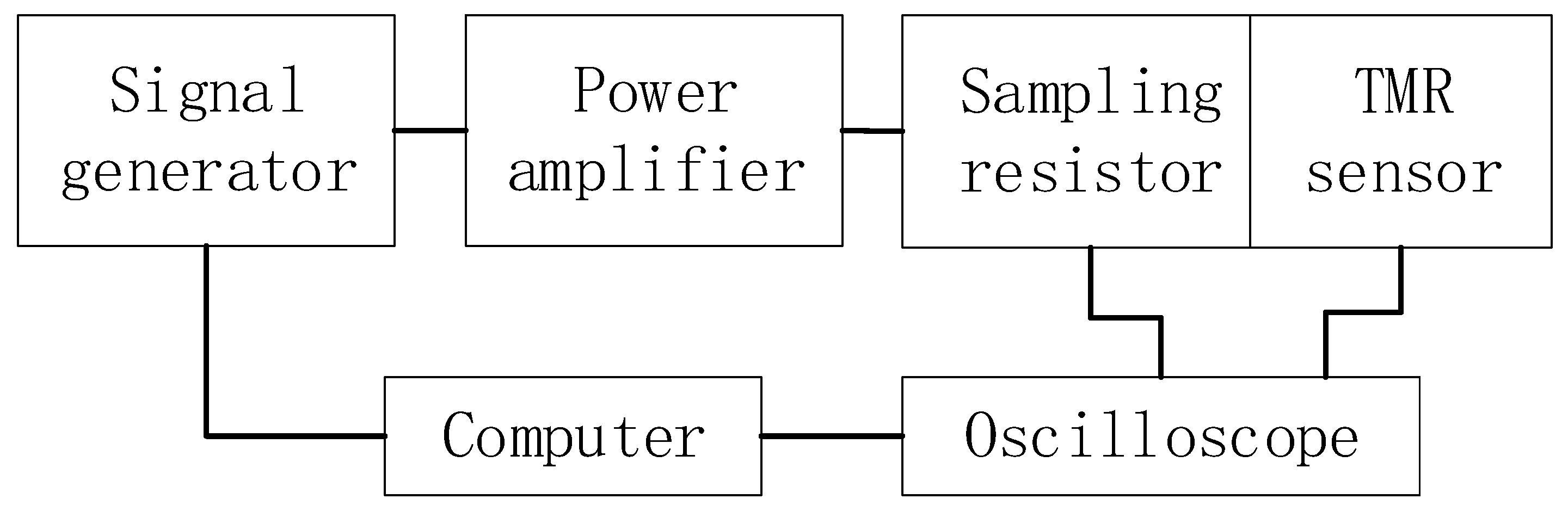
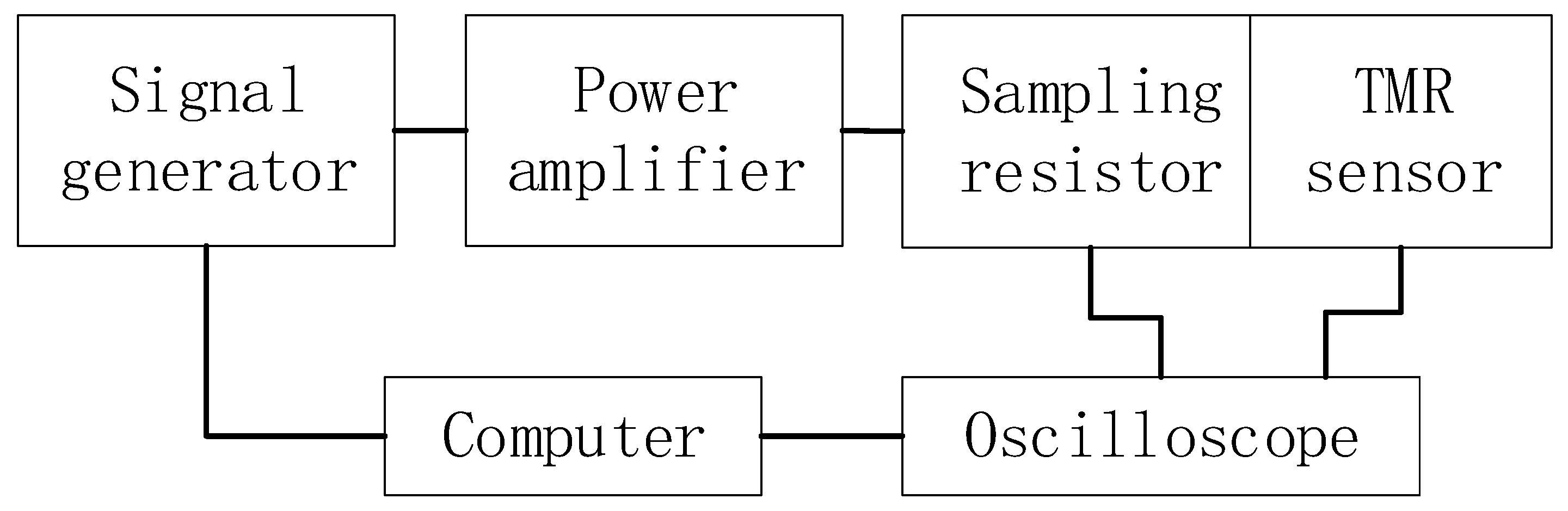
4.1. Experimental Structure
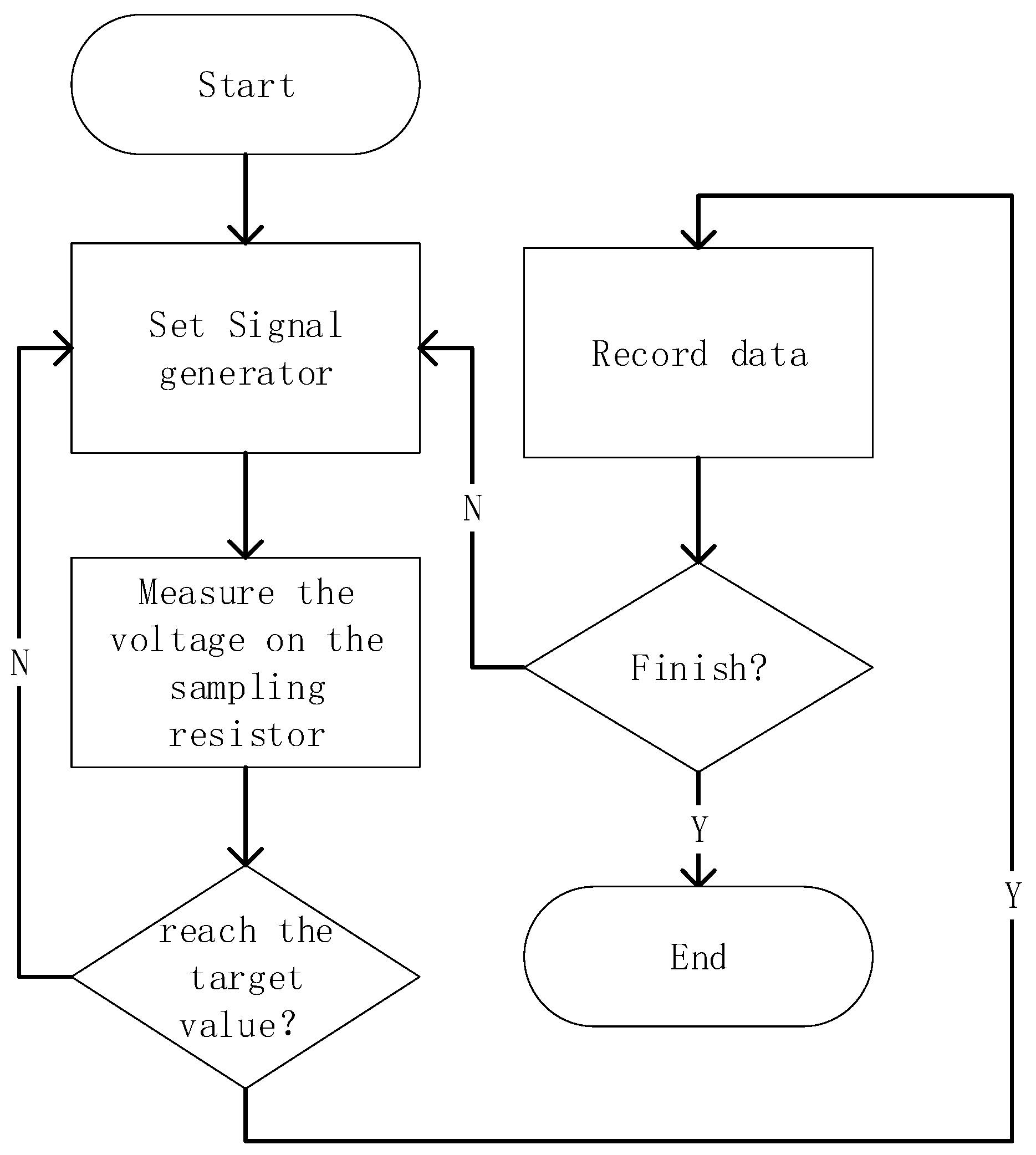
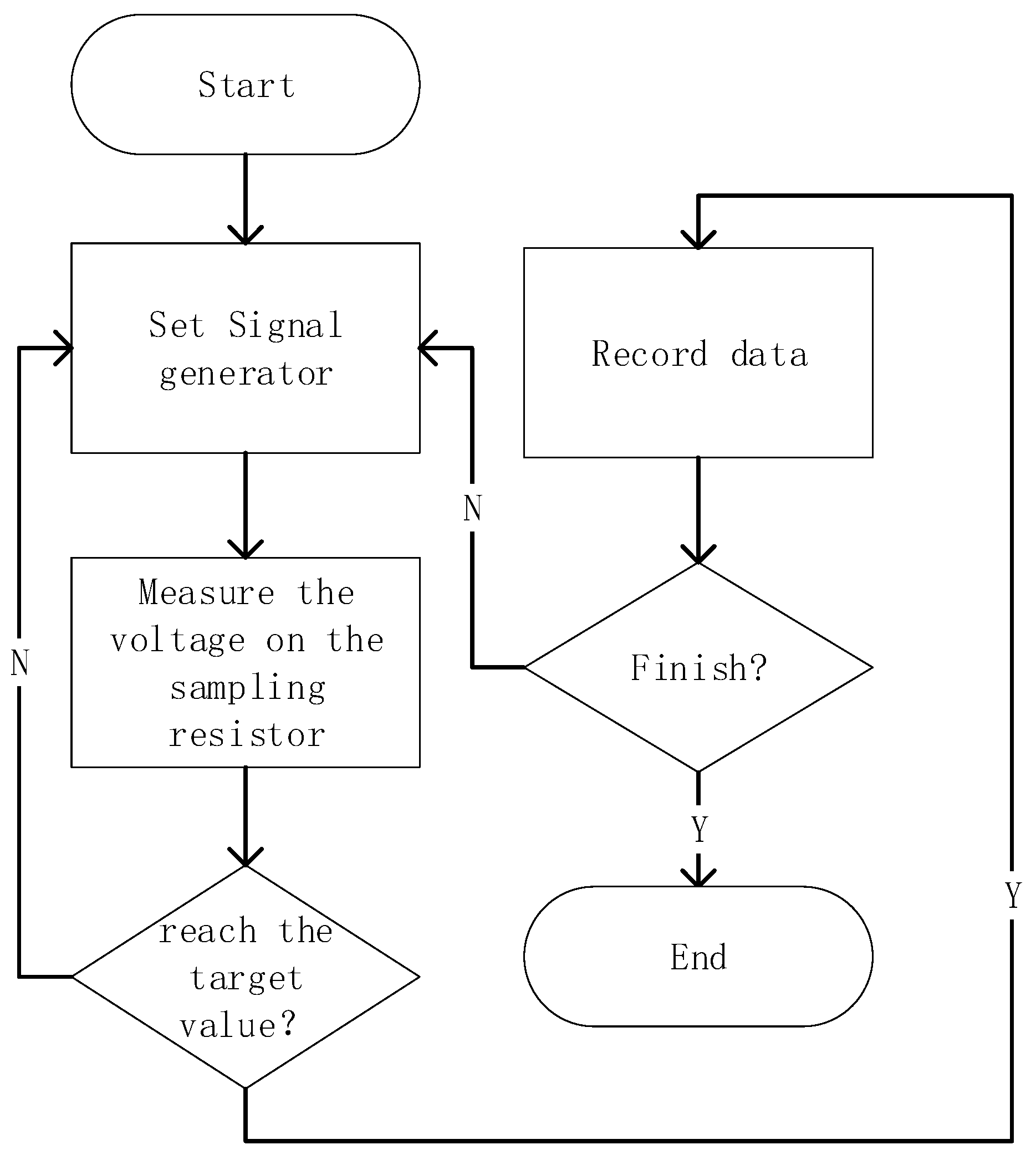
4.2. Experimental Process
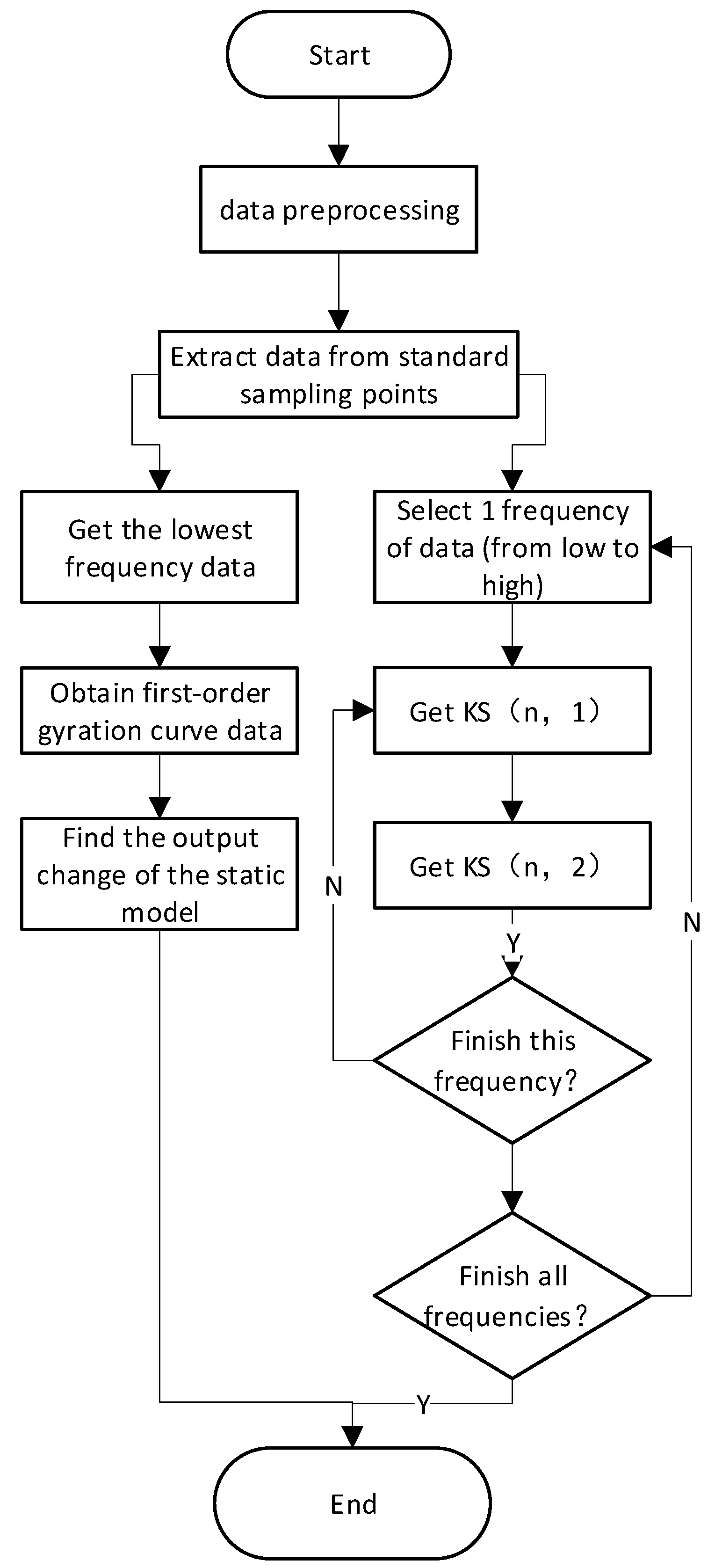
4.3. Data Processing
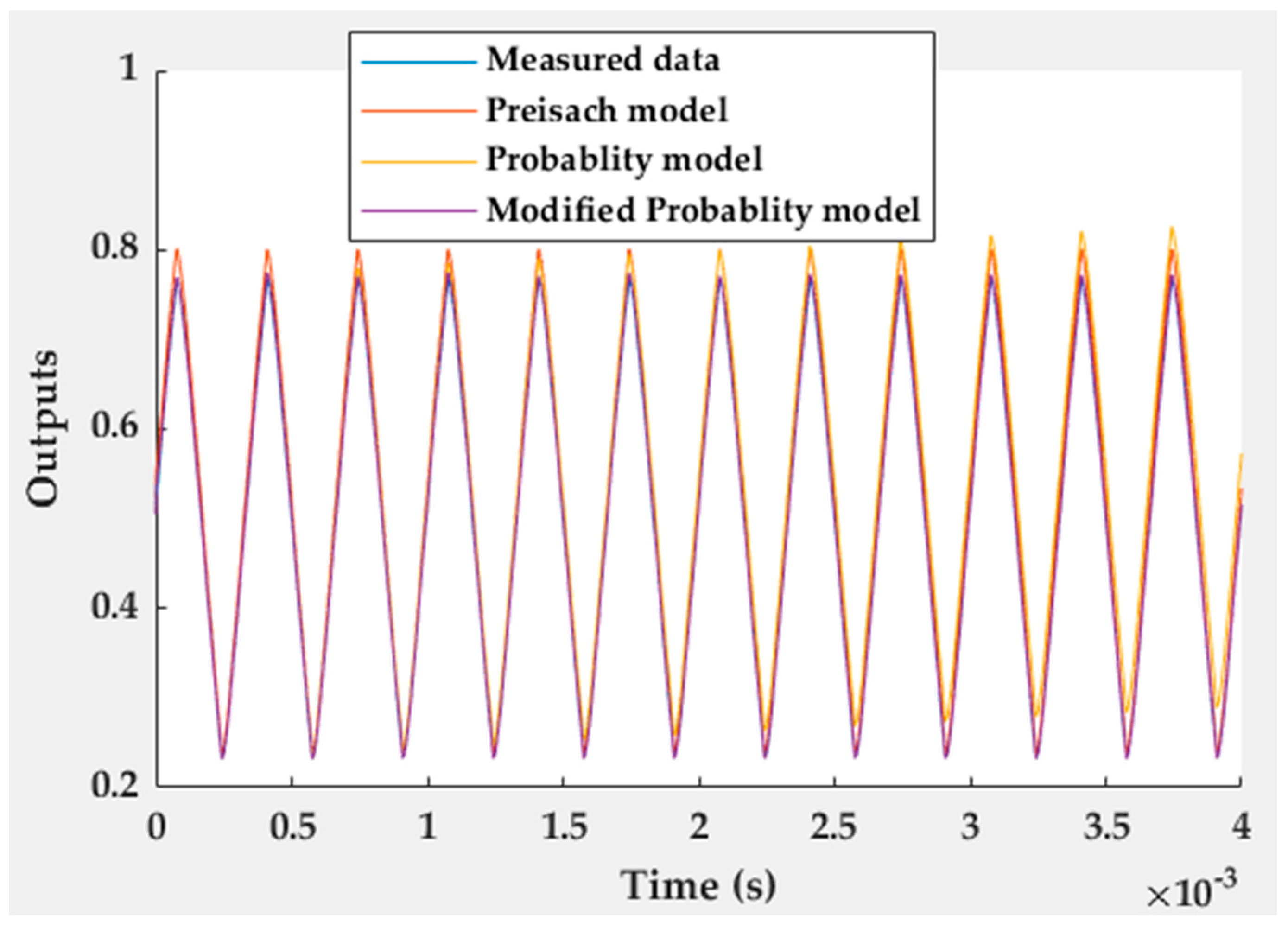
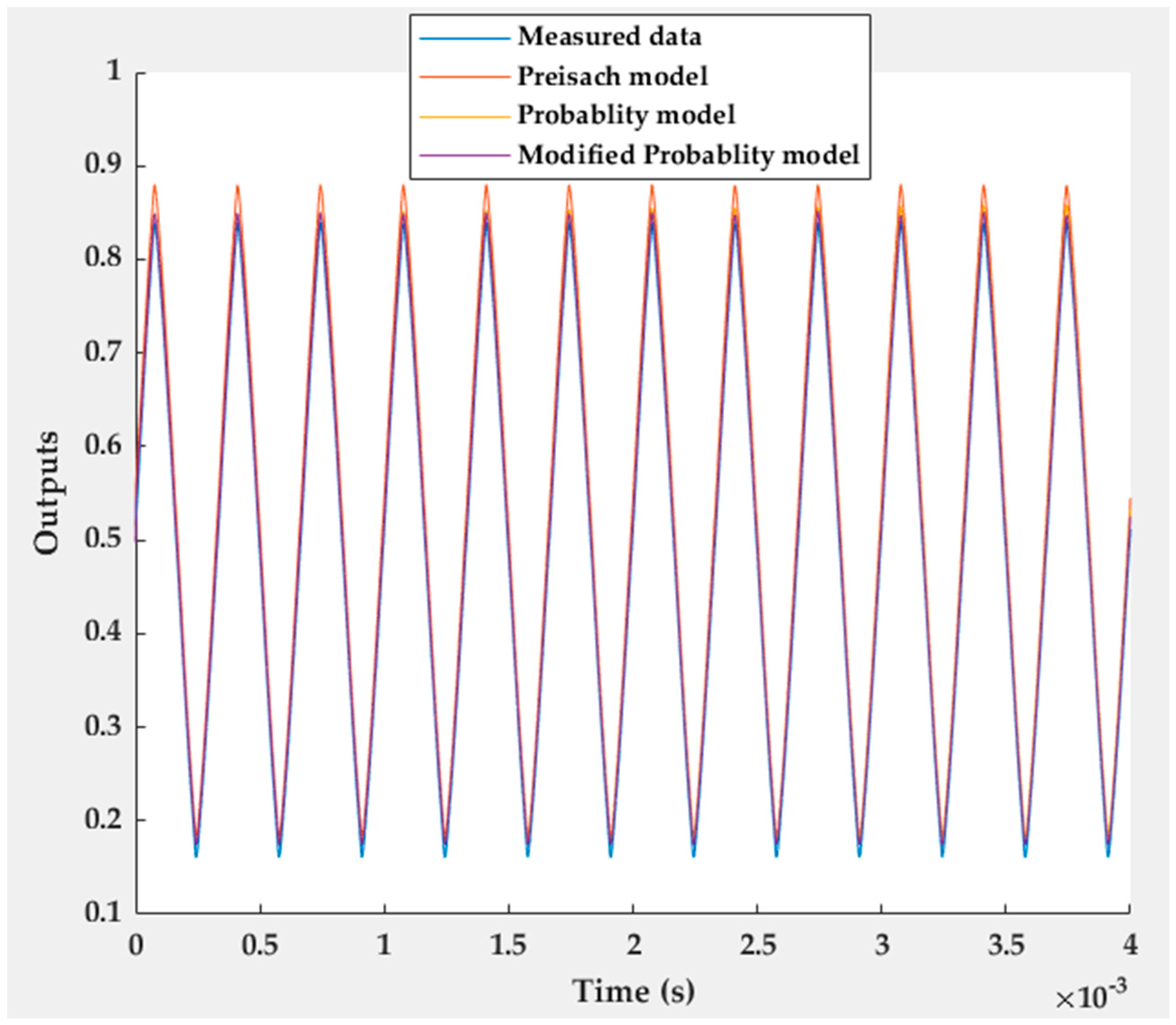
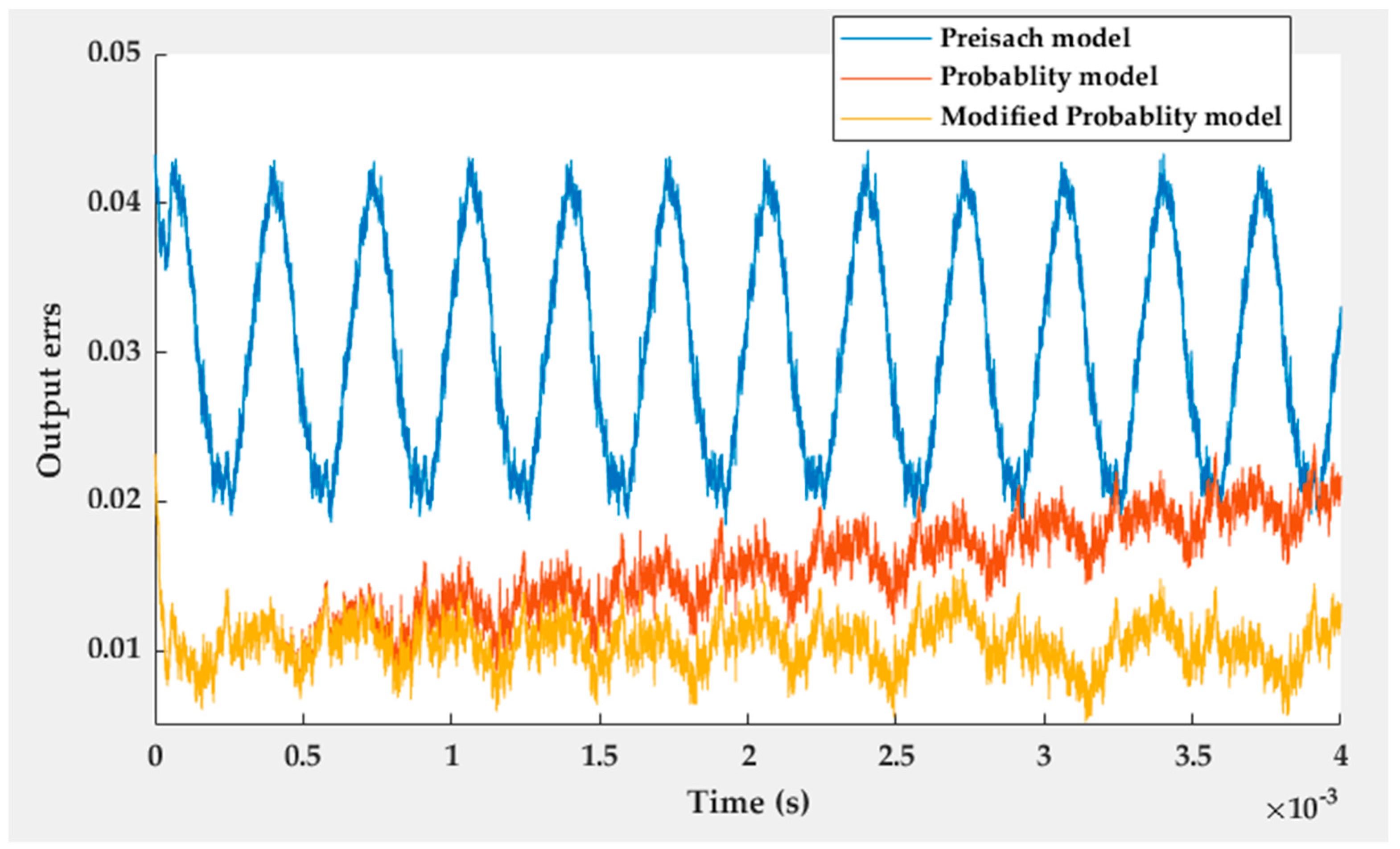
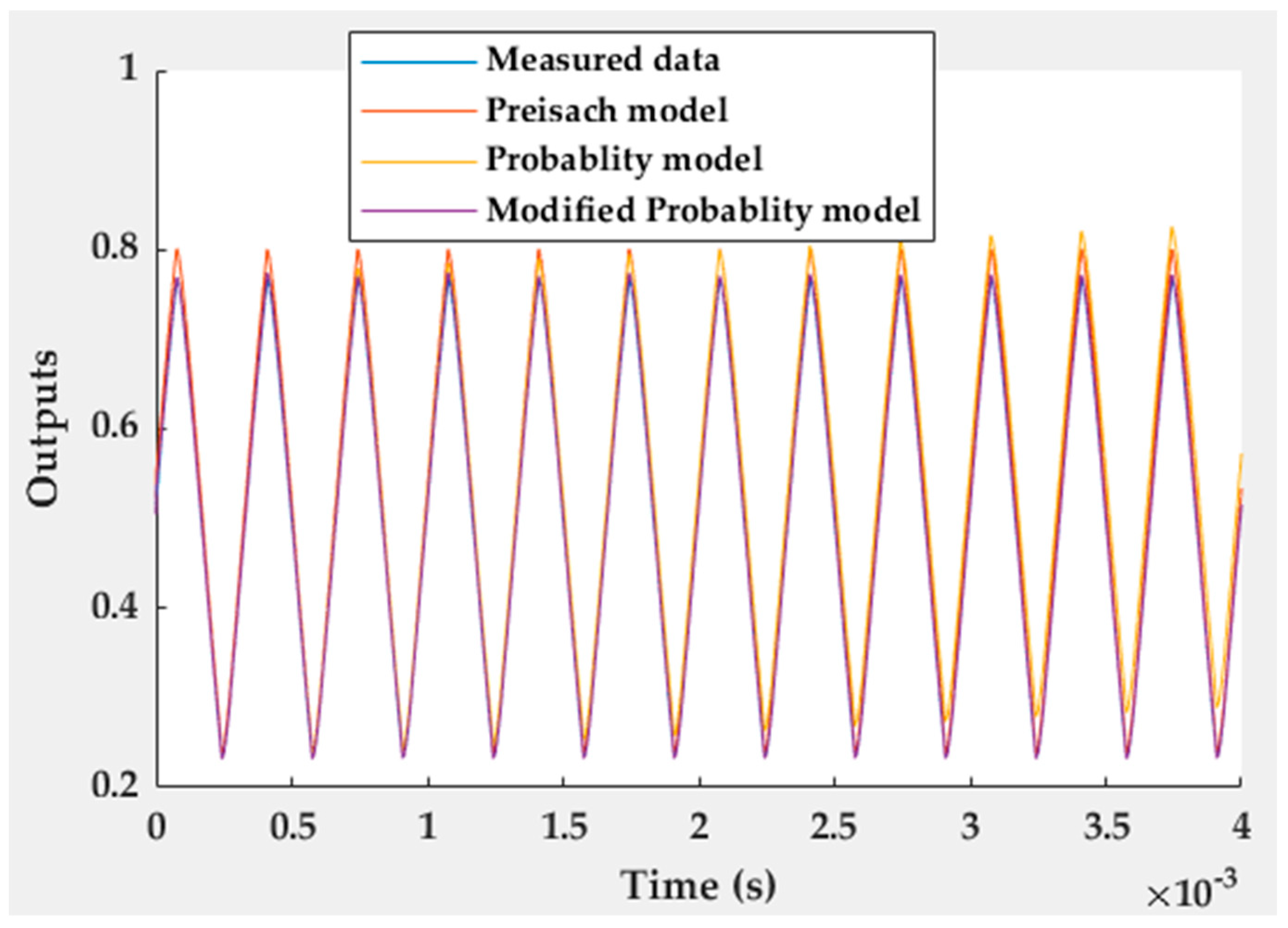
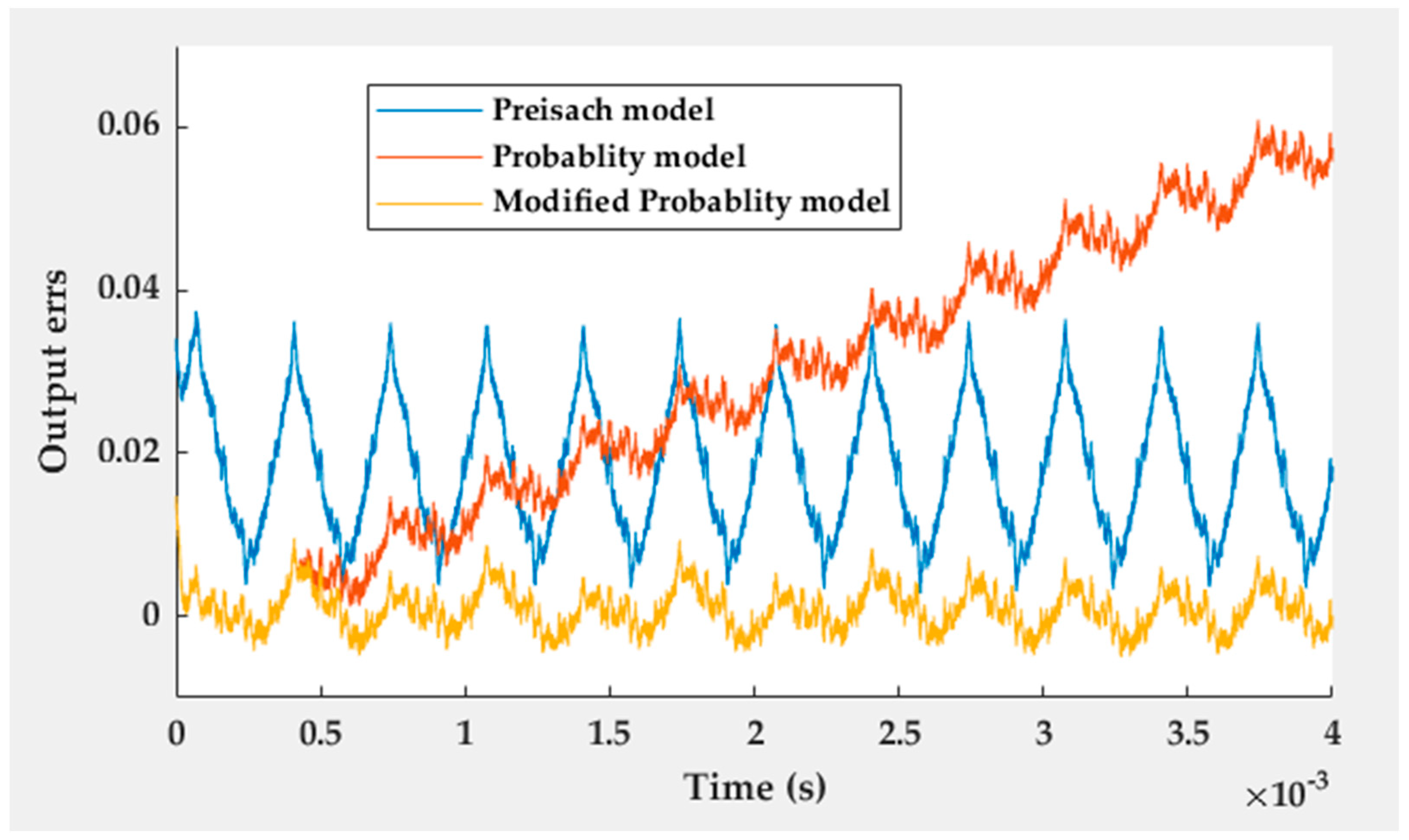
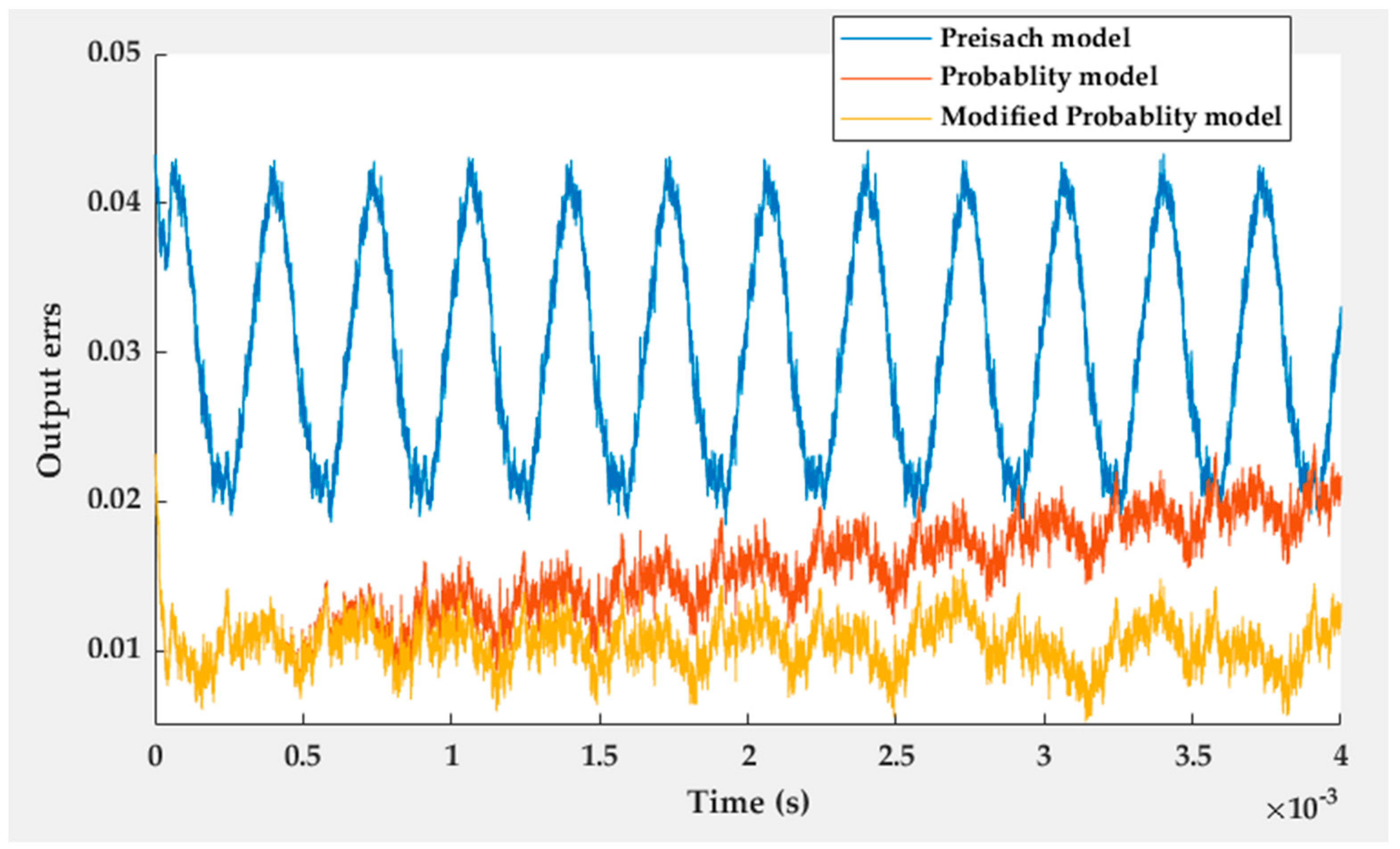
5. Results and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Baibich, M.N.; Broto, J.M.; Fert, A.; Van Dau, F.N.; Petroff, F.; Etienne, P.; Creuzet, G.; Friederich, A.; Chazelas, J. Giant magnetoresistance of (001) Fe/(001) Cr magnetic superlattices. Phys. Rev. Lett. 1988, 61, 2472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Binasch, G.; Grünberg, P.; Saurenbach, F.; Zinn, W. Enhanced magnetoresistance in layered magnetic structures with antiferromagnetic interlayer exchange. Phys. Rev. B 1989, 39, 4828–4830. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Neeraja, R.; Sarah, E.C.; Luis, M.F. A GMR-based assay for quantification of the human response to influenza. Biosens. Bioelectron. 2022, 205, 114086. [Google Scholar] [CrossRef]
- Li, X.; Hu, J.; Chen, W.; Yin, L.; Liu, X. A Novel High-Precision Digital Tunneling Magnetic Resistance-Type Sensor for the Nanosatellites Space Application. Micromachines 2018, 9, 121. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, X.; Li, W.; Chen, G.; Yin, X.; Ge, J. Uniform Current Field Testing System with TMR Sensor Array for Non-contact Detection and Estimation of Cracks on Power Plant Piping. Sens. Actuators A Phys. 2017, 263. [Google Scholar]
- Masami, M.; Fumio, K.; Naoki, K. ESD tolerance of gmr and tmr heads within hard disk drive. IEEE Trans. Device Mater Reliab. 2010, 10, 476–481. [Google Scholar]
- Patrick, N.A.; Qi, H.; Dongsheng, C.; Olusola, B.; Paul, O.K.A. Real-time and contactless initial current traveling wave measurement for overhead transmission line fault detection based on tunnel magnetoresistive sensors. Electr. Power Syst. Res. 2020, 187, 106508. [Google Scholar]
- Daniel, K.; Kütt, L.; Iqbal, M.N.; Shabbir, N.; Rehman, A.U.; Shafiq, M.; Hamam, H. Current Harmonic Aggregation Cases for Contemporary Loads. Energies 2022, 15, 437. [Google Scholar] [CrossRef]
- Wang, S.; Wu, Z.; Peng, D.; Li, W.; Chen, S.; Liu, S. An angle displacement sensor using a simple gear. Sens. Actuators A Phys. 2018, 270, 245–251. [Google Scholar] [CrossRef]
- Knudde, S.; Farinha, G.; Leitao, D.; Ferreira, R.; Cardoso, S.; Freitas, P. AlOx barrier growth in magnetic tunnel junctions for sensor applications. J. Magn. Magn. Mater. 2016, 412, 181–184. [Google Scholar] [CrossRef]
- Xiaodong, Z.; Zheng, Q. The influence on hysteresis from the ending pinning design of GMR free layer. Microsyst. Technol. 2016, 22, 137–141. [Google Scholar] [CrossRef]
- John, M.A.; Arthur, V.P. Ultra-Low Hysteresis and Self-Biasing in GMR Sandwich Sensor Element. IEEE Trans. Magn. 2001, 37, 4. [Google Scholar]
- Michal, V.; Pavel, R.; Jan, K.; Mark, T. Improved GMR sensor biasing design. Sens. Actuator A Phys. 2004, 110, 254–258. [Google Scholar]
- Christian, B.; Roland, W. Correcting nonlinearity and temperature influence of sensors through B-Spline modeling. In Proceedings of the 2010 IEEE International Symposium on Industrial Electronics, Bari, Italy, 4–7 July 2010; pp. 3356–3361. [Google Scholar]
- Jinchi, H.; Jun, H.; Yong, O.; Shan, W.; Jinliang, H. Hysteretic Modeling of Output Characteristics of Giant Magneto-Resistive Current Sensors. IEEE Trans. Ind. Electron. 2014, 9, 1–9. [Google Scholar]
- Branko, K.; Alenka, M.; Nebojsa, M. Mathematical modelling of frequency-dependent hysteresis and energy loss of FeBSiC amorphous alloy. J. Magn. Magn. Mater. 2017, 422, 37–42. [Google Scholar]
- Christian, G.; Marco, B.; Mariano, P.; Nicholas, S. Dynamic Ferromagnetic Hysteresis Modelling Using a Preisach-Recurrent Neural Network Model. Materials 2020, 13, 256. [Google Scholar]
- Kucuk, I.; Derebasi, N. Dynamic hysteresis modelling for toroidal cores. Phys. B 2006, 372, 260–264. [Google Scholar] [CrossRef]
- Yonghong, T.; Liang, D. Modeling the dynamic sandwich system with hysteresis using NARMAX model. Math. Comput. Simul. 2014, 97, 162–188. [Google Scholar]
- Jiles, D.; Atherton, D. Ferromagnetic hysteresis. IEEE Trans. Magn. 1983, 19, 2183–2185. [Google Scholar] [CrossRef]
- Krasnosel’skii, M.A.; Pokrovskii, A.V. Systems with Hysteresis; Springer: New York, NY, USA, 1989. [Google Scholar]
- Yutao, L.; Liliang, W.; Hao, Y.; Zheng, Q. Research of Probability-Based Tunneling Magnetoresistive Sensor Static Hysteresis Model. Sensors 2021, 21, 7672. [Google Scholar] [CrossRef]
- Negulescu, B.; Lacour, D.; Montaigne, F.; Gerken, A.; Paul, J.; Spetter, V.; Marien, J.; Duret, C.; Hehn, C. Wide range and tunable linear magnetic tunnel junction sensor using two exchange pinned electrodes. Appl. Phys. Lett. 2009, 95, 11. [Google Scholar] [CrossRef] [Green Version]
- Ku, W.; Silva, F.; Bernardo, J.; Freitas, P.P. Integrated giant magnetoresistance bridge sensors with transverse permanent magnet biasing. J. Appl. Phys. 2000, 87, 5352–5355. [Google Scholar] [CrossRef]
- Liao, S.-H.; Huang, H.-S.; Sokolov, A.; Yang, Y.; Liu, Y.-F.; Yin, X.; Wilson, A.; Trujilo, A.; Ewing, D.; Liou, S.-H. Hysteresis Reduction in Tunneling Magnetoresistive Sensor with AC Modulation Magnetic Field. IEEE Trans. Magn. 2021, 57, 1–4. [Google Scholar] [CrossRef]
- Xie, F.; Weiss, R.; Weigel, R. Hysteresis Compensation Based on Controlled Current Pulses for Magnetoresistive Sensors. IEEE Trans. Ind. Electron. 2015, 62, 7804–7809. [Google Scholar] [CrossRef]
- Grandi, G.; Landini, M. Magnetic-field transducer based on closed loop operation of magnetic sensors. IEEE Trans. Ind. Electron. 2006, 53, 880–885. [Google Scholar] [CrossRef]
- Poon, T.Y.; Tse, N.C.F.; Lau, R.W.H. Extending the GMR current measurement range with a counteracting magnetic field. Sensors 2013, 13, 8042–8059. [Google Scholar] [CrossRef] [Green Version]
- Hudoffsky, B.; Roth-Stielow, J. New evaluation of low frequency capture for a wide bandwidth clamping current probe for ±800 A using GMR sensors. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–7. [Google Scholar]
- Bernieri, A.; Ferrigno, L.; Laracca, M.; Tamburrino, A. Improving GMR magnetometer sensor uncertainty by implementing an automatic procedure for calibration and adjustment. In Proceedings of the 2007 IEEE Instrumentation & Measurement Technology Conference IMTC 2007, Warsaw, Poland, 1–3 May 2007; pp. 1–6. [Google Scholar]
- Trutt, F.C.; Erdelyi, E.A.; Hopkins, R.E. Representation of the magnetization characteristic of DC machines for computer use. IEEE Trans. Power App. Syst. 1968, PAS-87, 665–669. [Google Scholar] [CrossRef]
- Rivas, J.; Zamarro, J.M.; Martin, E.; Pereira, C. Simple approximation for magnetization curves and hysteresis loops. IEEE Trans. Magn. 1981, MAG-17, 1498–1502. [Google Scholar] [CrossRef]
- Rohan, L.J. Representation of magnetisation curves over a wide region using a non-integer power series. Int. J. Electr. Eng. Educ. 1988, 25, 335–340. [Google Scholar]
- Jenõ, T. A phenomenological mathematical model of hysteresis. Proc. COMPEL 2001, 20, 1002–1015. [Google Scholar]
- István, J.; Roland, W.; Robert, W. Linearizing the output characteristic of GMR current Sensors through hysteresis modeling. IEEE Trans. Ind. Electron. 2010, 57, 1728–1734. [Google Scholar]
- Brauer, J.R. Simple equations for the magnetization and reluctivity curves of steel. IEEE Trans. Magn. 1975, MAG-11, 81. [Google Scholar] [CrossRef]
- Ru, C.; Chen, L.; Shao, B.; Rong, W.; Sun, L. A hysteresis compensation method of piezoelectric actuator: Model, identification and control. J.Control Eng. Pract. 2009, 17, 1107–1114. [Google Scholar] [CrossRef]
- Chih-Cheng, K.; Rong-Fong, F. Using the modified PSO method to identify a Scott-Russell mechanism actuated by a piezoelectric element. Mech. Syst. Signal Process 2009, 23, 1652–1661. [Google Scholar] [CrossRef]
- Preisach, F. Über die magnetische Nachwirkung. Z. Phys. 1935, 94, 277–302. [Google Scholar] [CrossRef]
- Mayergoyz, I.D. Dynamic preisach models of hysteresis. IEEE Trans. Magn. 1988, 24, 2925–2927. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Literatures | Shortcoming | ||
|---|---|---|---|---|
| Structure | inner | [10,11,12,23,24] | Cost highest. Difficulty applying. | |
| outside | [13,25,26,27,28,29,30] | Cost higher. Power comsumption. Difficulty applying. | ||
| Model | Black-box | Empirical formulas | [14,15,16,31,32,33,34,35,36] | Specific range. Accuracy low. |
| Machine learning | [17,18,19,37,38] | Cost high. Difficulty applying. | ||
| White-box | [20,21,22,39,40] | Accuracy low. | ||
| Maximum | Variance | Average Value | ||
|---|---|---|---|---|
| Sensor 1 | Preisach model | 0.0375 | 6.8488 × 10−5 | 0.0184 |
| Modified probability model | 0.0147 | 6.6941 × 10−6 | 8.4390 × 10−4 | |
| Improvement effect | 60.8% | 90.2% | 95.4% | |
| Sensor 2 | Preisach model | 0.0436 | 5.3854 × 10−5 | 0.0301 |
| Modified probability model | 0.0232 | 2.7935 × 10−6 | 0.0105 | |
| Improvement effect | 46.7% | 94.8% | 65.1% |
| Frequency | Metrics | Sensor 1 | Sensor 2 | ||||
|---|---|---|---|---|---|---|---|
| Preisach Model | Probability Model | Improve | Preisach Model | Probability Model | Improve | ||
| 1 kHz | Maximum | 0.0323 | 0.0134 | 58.5% | 0.0205 | 0.006 | 70.7% |
| Variance | 6.49 × 10−5 | 1.44 × 10−5 | 77.8% | 4.63 × 10−5 | 1.42 × 10−6 | 96.9% | |
| Average value | −0.0176 | −0.0059 | 66.5% | −0.0095 | 0.0018 | 81.1% | |
| 5 kHz | Maximum | 0.0296 | 0.0115 | 61.1% | 0.0204 | 0.0066 | 67.6% |
| Variance | 6.38 × 10−5 | 7.99 × 10−5 | 87.5% | 5.24 × 10−5 | 3.45 × 10−6 | 93.4% | |
| Average value | −0.0135 | 7.69 × 10−5 | 99.4% | −0.0088 | 0.0019 | 78.4% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Wang, L.; Yu, H.; An, J.; Pei, Y.; Qian, Z. A Dynamic Hysteresis Model for TMR-Current Sensors Based on Probability Estimation of Hysteresis Operator and Its Switching Time. Appl. Sci. 2022, 12, 4985. https://doi.org/10.3390/app12104985
Li Y, Wang L, Yu H, An J, Pei Y, Qian Z. A Dynamic Hysteresis Model for TMR-Current Sensors Based on Probability Estimation of Hysteresis Operator and Its Switching Time. Applied Sciences. 2022; 12(10):4985. https://doi.org/10.3390/app12104985
Chicago/Turabian StyleLi, Yutao, Liliang Wang, Hao Yu, Jiayi An, Yan Pei, and Zheng Qian. 2022. "A Dynamic Hysteresis Model for TMR-Current Sensors Based on Probability Estimation of Hysteresis Operator and Its Switching Time" Applied Sciences 12, no. 10: 4985. https://doi.org/10.3390/app12104985
APA StyleLi, Y., Wang, L., Yu, H., An, J., Pei, Y., & Qian, Z. (2022). A Dynamic Hysteresis Model for TMR-Current Sensors Based on Probability Estimation of Hysteresis Operator and Its Switching Time. Applied Sciences, 12(10), 4985. https://doi.org/10.3390/app12104985