
A Spectrum Correction Method Based on Optimizing Turbulence Intensity


Abstract
:1. Introduction
2. Materials and Methods
2.1. Turbulent Wind Field Model
2.2. Basic Algorithm for Simulating Fluctuating Wind Speed Time History
- (1)
- According to the sampling theorem [16], the simulation parameters are set in the frequency domain, including:
- Sampling frequency , in order to ensure that the analog signal can be reconstructed accurately without aliasing, is required to be greater than two times the value of , indicates the upper limit of the analog frequency range, which denotes also the cut-off frequency in this paper;
- The initial frequency and cutoff frequency , which are selected by considering the dimensionless power spectral density function image and the influence of truncation error in the simulation frequency range on the simulation variance [17], the frequency step size is denoted by , where represents the frequency sampling number.
- (2)
- Set simulation parameters in the time domain, including:
- Sampling interval , ;
- Analog time points , generally .
- (3)
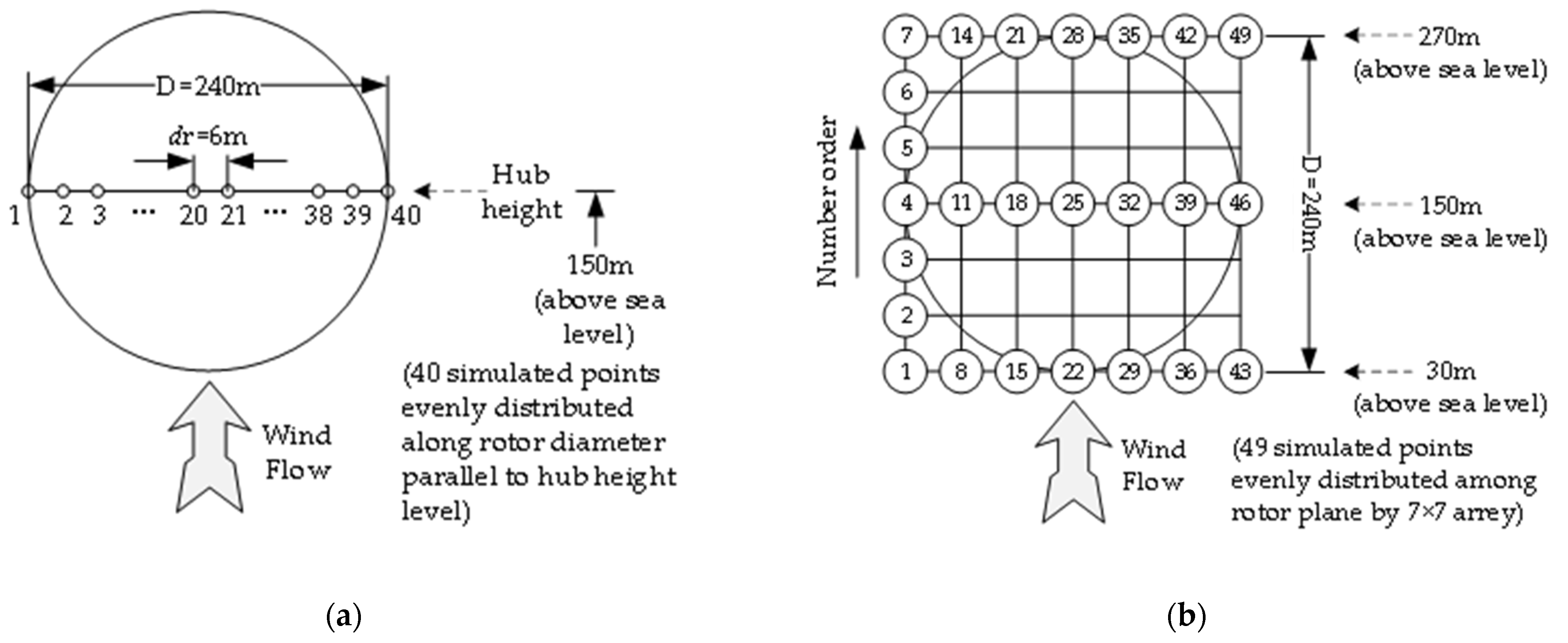
- Set the basic parameters of the simulated wind field, including simulation points , simulation height , and spacing between simulation points , etc.
- (4)
- Calculate the cross-spectral density matrix of each frequency sampling point , :
- (5)
- Combined with the double-indexed frequency method, the Cholesky decomposition method is performed on the cross-spectral density matrix of sampling points at each frequency, and the decomposed lower triangular matrix is obtained, that is:
- (6)
- Random phase obedience is introduced and subjected to independent random distribution among intervals , carrying out the Fast Fourier transformation, namely:
- (7)
- Employing harmonic superposition method to generate the wind speed time history of the simulated point samples, and can be calculated by Equation (11):
2.3. Power Spectrum Correction Method
3. Results and Discussion
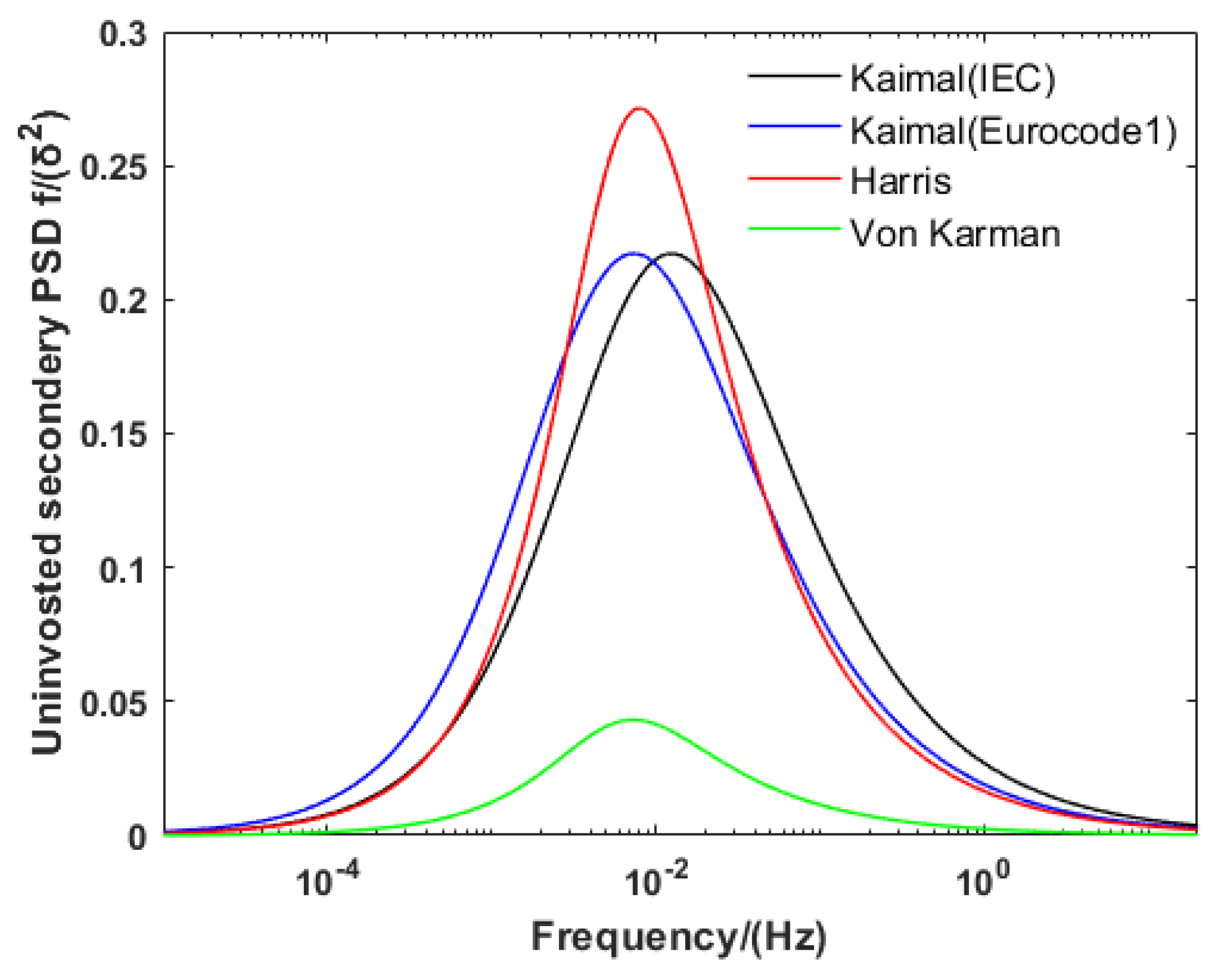
3.1. Power Density Spectrum and Coherence Function Selection
- (1)
- Wind speed definition standard deviation :
- (2)
- Integral scale parameter :
3.2. Determine the Analog Frequency Range
3.3. Compensation Coefficient Correction Method
- (1)
- The standard deviation generated by the Kaimal spectrum simulation of a one-dimensional turbulent wind field decreases from 0.102 to 0.01, and the reduction is 9.2 times, and the error of truncation deviation is only 10%;
- (2)
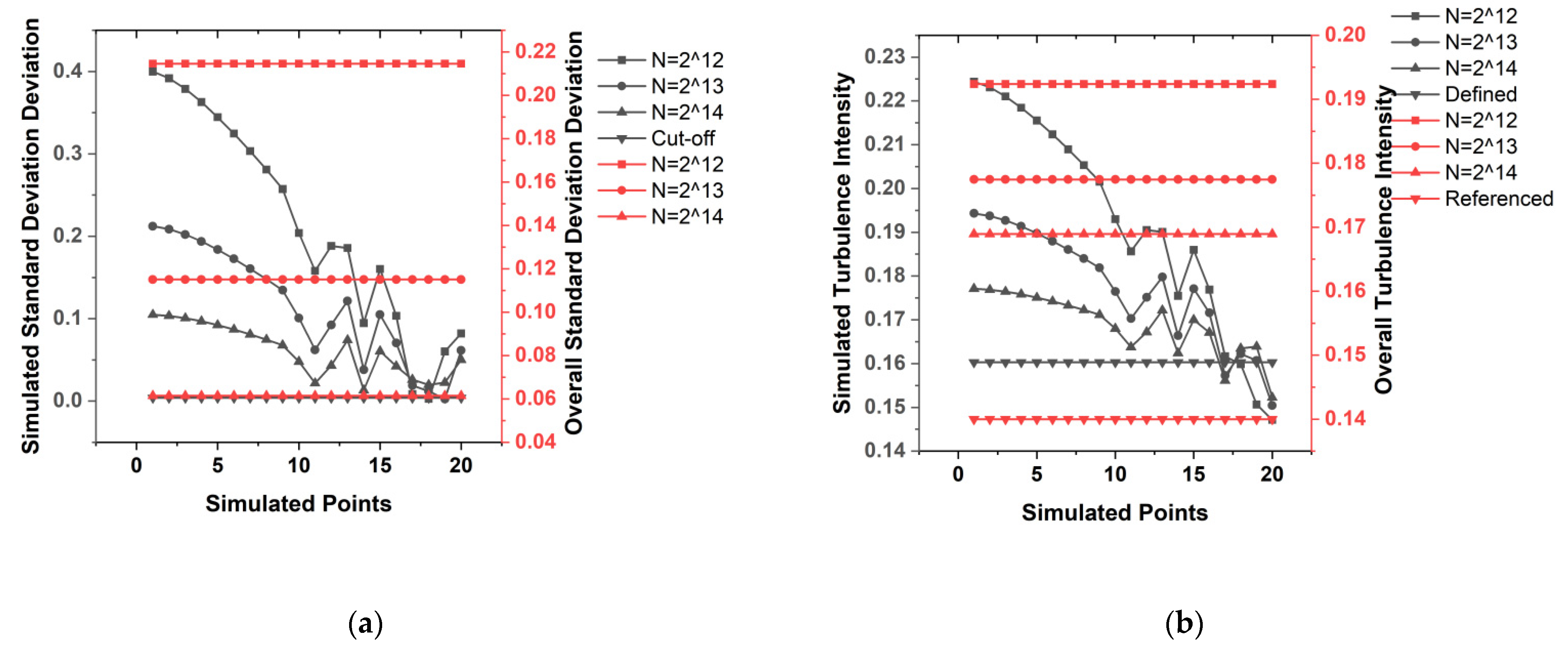
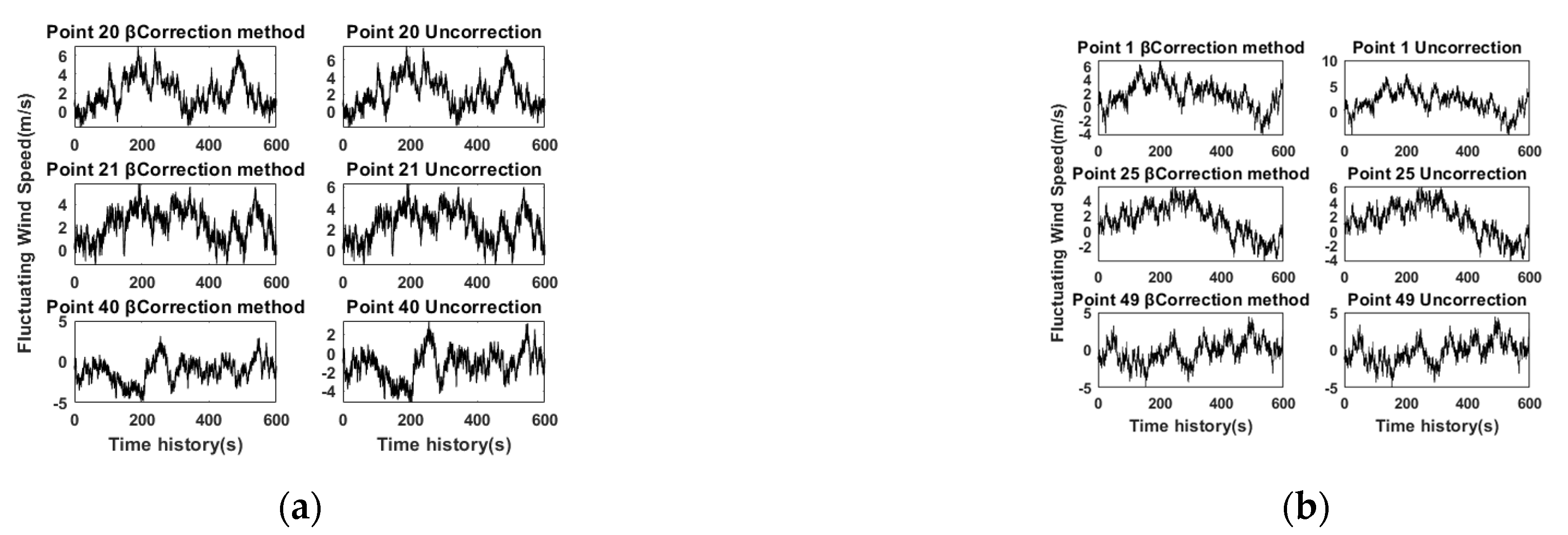
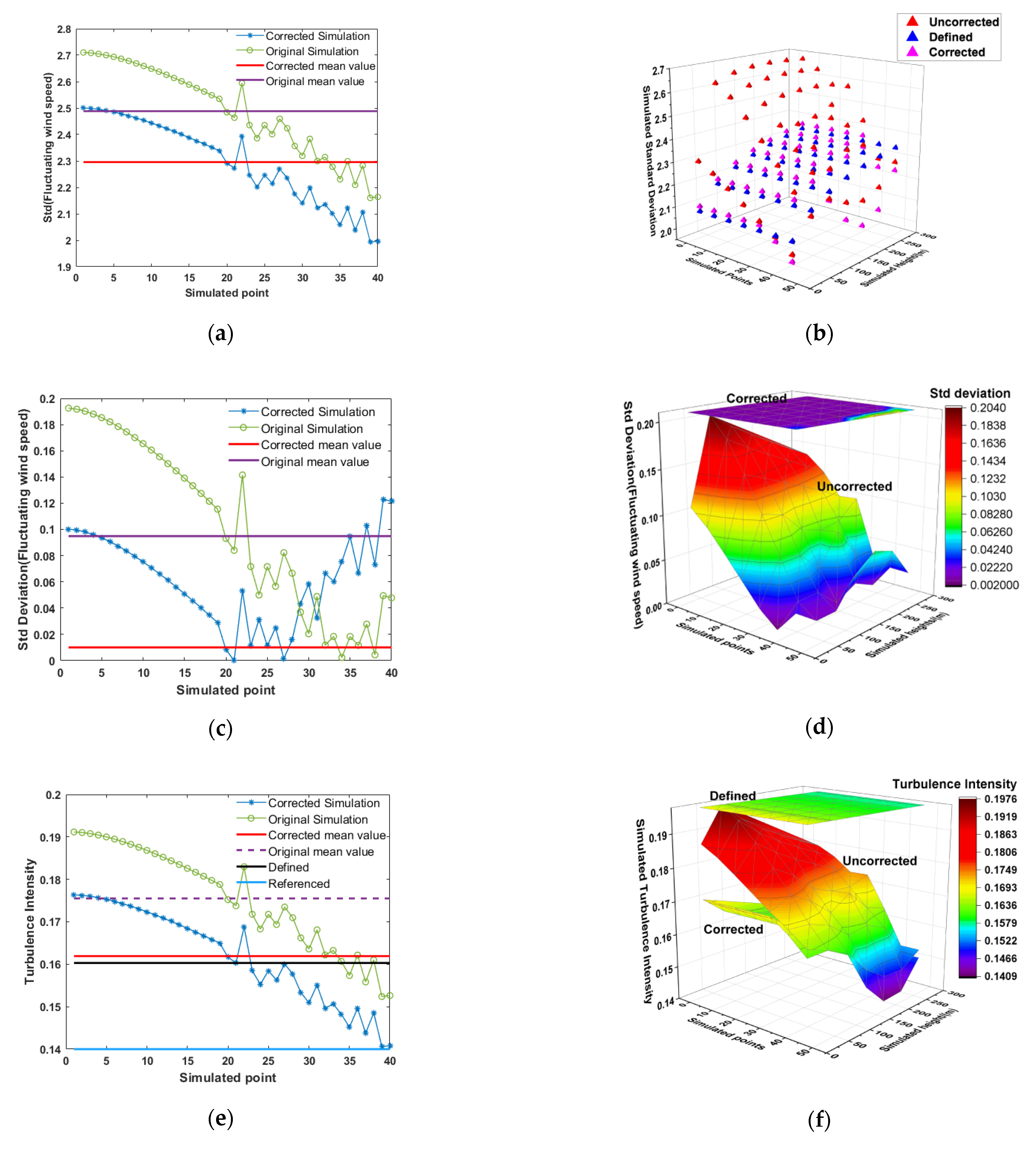
- The numerical values of the Kaimal power density spectrum with a modified compensation coefficient simulating the overall turbulence intensity of the spatial turbulent wind field are closer to the defined turbulence intensity , which is defined as the ratio of the fully defined standard deviation to the average wind speed . In the one-dimensional wind field, the corrected Kaimal spectrum can provide more simulated points that are conservative, according to Figure 8a,c, and the mean value of standard deviation has declined by 0.2 point while the standard deviation’s deviation has dropped over 84.2%. Moreover, it can be drawn from Figure 8e that the turbulence intensity value of 45% (18/40) of the simulated points set in the simulation process finally reach the interval of [Referenced, Defined] after the spectrum is corrected, compared with that of the uncorrected spectrum simulation result, which has increased 35%. Therefore, the rate of efficient simulation points in the wind field has obtained a significant promotion. As can be seen from Figure 8e,f, the overall turbulence intensity of the compensated corrected turbulent wind field (referring to the “corrected mean value” line and “Defined” surface, respectively, in Figure 8) is very close to the turbulence intensity defined by the wind field;
- (3)
- The Kaimal power density spectrum simulation with the modified compensation coefficient generates a more simulated point of fluctuating wind speed turbulence intensity that is distributed within the IEC reference turbulence intensity and defined turbulence intensity range, which can be effectively used in load design evaluation;
- (4)
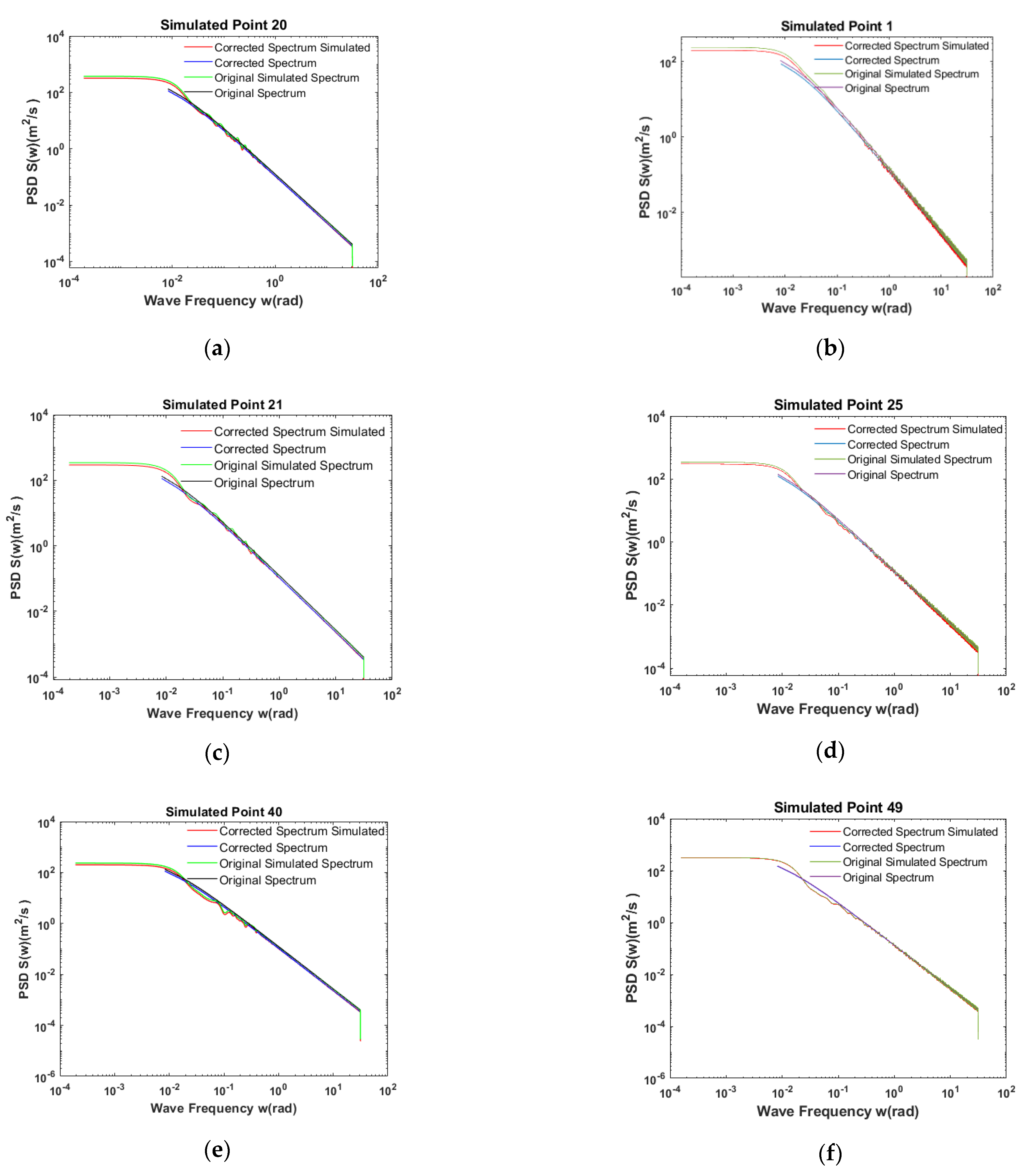
- According to Figure 7, the line of the ‘Corrected Spectrum Simulated’ can always fit well with the line of the ‘Corrected Spectrum’, just like the line of the ‘Original Simulated Spectrum’ and the line of the ‘Original Spectrum’ does, which indicates that the fluctuating wind speed generated by the Kaimal power density spectrum simulation with the modified compensation coefficient can perfectly fit the modified self-power spectrum and meet the requirements of engineering applications.
4. Conclusions
- (1)
- The truncation standard deviation’s bias that is generated due to the simulated frequency range truncating from the fully defined range affects the simulated turbulent intensity of the fluctuating wind speed. Reducing the error between the truncation standard deviation and the defined standard deviation can effectively reduce the effect and take the simulated turbulence intensity closer to the defined turbulence intensity ;
- (2)
- Under the same simulation conditions, the influence of the initial frequency on the truncation standard deviation’s bias is significantly greater than that of the cutoff frequency . When , the ratio of truncation standard deviation to defined standard deviation has fallen within the confidence interval of . Under this value, the value range of cutoff frequency can be within [5,10], and the truncation deviation is small enough;
- (3)
- The turbulence intensity of the turbulent wind field simulated by the Kaimal spectrum of IEC61400-1 and IEC referenced the exponential coherent function is more conservative and more consistent with the defined turbulence intensity;
- (4)
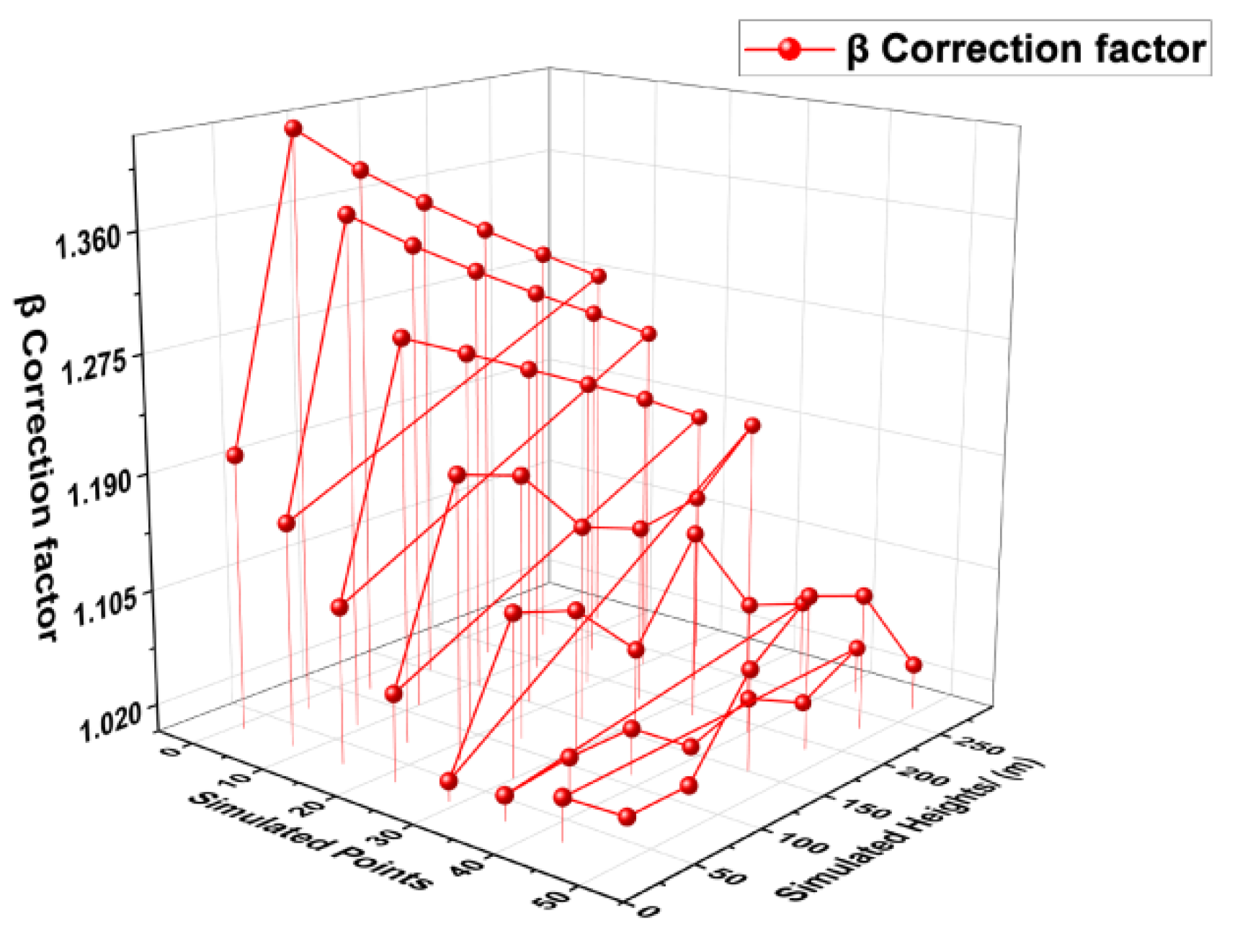
- The calculation method of the compensation coefficient proposed in this paper is not that precise, for its value would change with the simulated height and distance. Nevertheless, the correction methodology can be employed to any wind speed PSD model for wind speed time-history simulation in uniform space.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bustamante, A.; Vera-Tudela, L.; Kuhn, M. Evaluation of wind farm effects on fatigue loads of an individual wind turbine at the EnBW Baltic 1 offshore wind farm. In Proceedings of the Wake Conference 2015, Visby, Sweden, 9–11 June 2015. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Zhang, J.; Wang, N. Wind turbine wind field models study numerical simulation of turbulence wind field with MATLAB. Acta Energiae Solaris Sinica 2006, 27, 954–960. [Google Scholar]
- Von Karman, T. Progress in the statistical theory of turbulence. Proc. Natl. Acad. Sci. USA 1948, 34, 530–539. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Harris, R.I. The nature of wind. In The Modern Design of Wind-Sensitive Structures; Construction Industry Research and Information Association: London, UK, 1971. [Google Scholar]
- Simiu, E. Wind spectrum dynamic along wind response. J. Struct. Div. 1974, 100, 203–209. [Google Scholar] [CrossRef]
- Kaimal, J.C.; Wyngaard, J.C.; Izumi, Y.; Coté, O.R. Spectral characteristics of surface-layer turbulence. Q. J. R. Meteorol. Soc. 1972, 98, 563–589. [Google Scholar] [CrossRef]
- Liang, J.; Chaudhuri, S.; Shinozuka, M. Simulation of nonstationary stochastic processes by spectral representation. J. Eng. Mech. 2007, 133, 616–627. [Google Scholar] [CrossRef]
- Shinozuka, M. Simulation of multivariate and multidimensional random process. J. Acoust. Soc. Am. 1971, 49, 357–368. [Google Scholar] [CrossRef]
- Ding, Q.; Zhu, L.; Xiang, H. An efficient ergodic simulation of multivariate stochastic process with spectral representation. Probabilistic Eng. Mech. 2011, 26, 350–356. [Google Scholar] [CrossRef]
- Tao, T.; Wang, H. Reduced simulation of the wind field based on Hermite interpolation. Eng. Mech. 2017, 34, 182–188. [Google Scholar] [CrossRef]
- Peng, L.; Huang, G.; Kareem, A.; Li, Y. An efficient space-time based simulation approach of wind velocity field with embedded conditional interpolation for unevenly spaced locations. Probabilistic Eng. Mech. 2016, 43, 156–168. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Chen, J.; Li, J. Numerical simulation of fluctuating wind velocity time series of offshore wind turbine. Proc. CSEE 2008, 28, 111–116. [Google Scholar]
- Shen, G.H.; Huang, Q.Q.; Guo, Y.; Xing, Y.L.; Lou, W.J.; Sun, B.N. Simulation methods of fluctuating wind field and its application in wind-induced response of transmission lines. Acta Aerodyn. Sinica 2013, 31, 69–74. [Google Scholar] [CrossRef]
- Zhang, W.; Ma, C.; Sun, X.; Ju, X.L.; Liu, Y.C. Simulation of wind field with spacial correlation based on wavelet analysis method. Acta Aerodyn. Sinica 2008, 26, 425–429. [Google Scholar]
- Det Norske Veritas, Risø DTU National Laboratory. Guidelines for Design of Wind Turbines, 2nd ed.; China Machine Press: Beijing, China, 2011. [Google Scholar]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing: Principle, Algorithms, and Applications; Electronic Industry Press: Beijing, China, 2014. [Google Scholar]
- Zhao, W.; Liao, M. A method for improving Kaimal spectrum and its algorithm implementation. Mech. Sci. Technol. Aerosp. Eng. 2013, 32, 1446–1450. [Google Scholar]
- IEC 61400-1. Wind Energy Generation Systems—Part 1: Design Requirements, 4th ed.; International Electrotechnical Commission: Geneva, Switzerland, 2019. [Google Scholar]
- Davenport, A.G. The spectrum of horizontal gustiness near the ground in high winds. Q. J. R. Meteorol. Soc. 1961, 87, 194–211. [Google Scholar] [CrossRef]
- IEA Task 37 2020 IEA GitHub Repository. Available online: https://github.com/IEAWindTask37/IEA-15-240-RWT (accessed on 11 August 2021).
- Hong, X.; Li, J. Stochastic Fourier Spectrum model and probabilistic information analysis for wind speed process. J. Wind Eng. Ind. Aerodyn. 2018, 1, 174. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test No. | Test 1 | Test 2 | Test 3 |
|---|---|---|---|
| magnitude of | |||
| 0.0026 | 0.0026 | 0.0131 | |
| 0.2146 | 0.1151 | 0.0615 | |
| 0.3998 | 0.2122 | 0.1049 | |
| CPU time | 40s | 84s | 212s |
| capacity | 15 MW |
| wind turbine diameter | 240 m |
| hub height | 150 m |
| the reference mean wind speed | 10.59 m/s |
| reference turbulence intensity | 0.14 |
| One-Dimensional Space | Two-Dimensional Space | |
|---|---|---|
| number of simulated points | 40 | 49 |
| simulated point spacing | Calculate according to the Formula (3) in Section 2.2 | |
| frequency sampling number | ||
| analog time points |
| Main Parameters | ||
|---|---|---|
| the transverse (k = 2) | ||
| the vertical (k = 3) |
| Object Parameters | Numerical Value |
|---|---|
| fully defined standard deviation | 2.2727 |
| truncated standard deviation | 2.2476 |
| the standard deviation of wind field simulation | 2.4883 |
| truncated standard deviation’s bias | 0.0110 |
| simulated standard deviation’s bias | 0.0949 |
| Mock Generated Objects | Uncorrected | Corrected | |
|---|---|---|---|
| simulated standard deviation | Maximum | 2.7103 | 2.4802 |
| Minimum | 2.1604 | 1.9818 | |
| Average | 2.4883 | 2.2954 | |
| simulated standard deviation’s bias | Maximum | 0.1925 | 0.1280 |
| Minimum | 0.0024 | 0.0031 | |
| Average | 0.1020 | 0.01 | |
| simulated turbulence intensity | 0.1755 | 0.1619 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, W.; Lu, Z.; Hao, J.; Zhang, X.; Chen, Y.; Huang, Z. A Spectrum Correction Method Based on Optimizing Turbulence Intensity. Appl. Sci. 2022, 12, 66. https://doi.org/10.3390/app12010066
Yi W, Lu Z, Hao J, Zhang X, Chen Y, Huang Z. A Spectrum Correction Method Based on Optimizing Turbulence Intensity. Applied Sciences. 2022; 12(1):66. https://doi.org/10.3390/app12010066
Chicago/Turabian StyleYi, Wenwu, Ziqi Lu, Junbo Hao, Xinge Zhang, Yan Chen, and Zhihong Huang. 2022. "A Spectrum Correction Method Based on Optimizing Turbulence Intensity" Applied Sciences 12, no. 1: 66. https://doi.org/10.3390/app12010066
APA StyleYi, W., Lu, Z., Hao, J., Zhang, X., Chen, Y., & Huang, Z. (2022). A Spectrum Correction Method Based on Optimizing Turbulence Intensity. Applied Sciences, 12(1), 66. https://doi.org/10.3390/app12010066