
Estimation of Acoustic Source Positioning Error Determined by One-Dimensional Linear Location Technique

 ,
,
Abstract
:1. Introduction
2. Experimental Method and Results
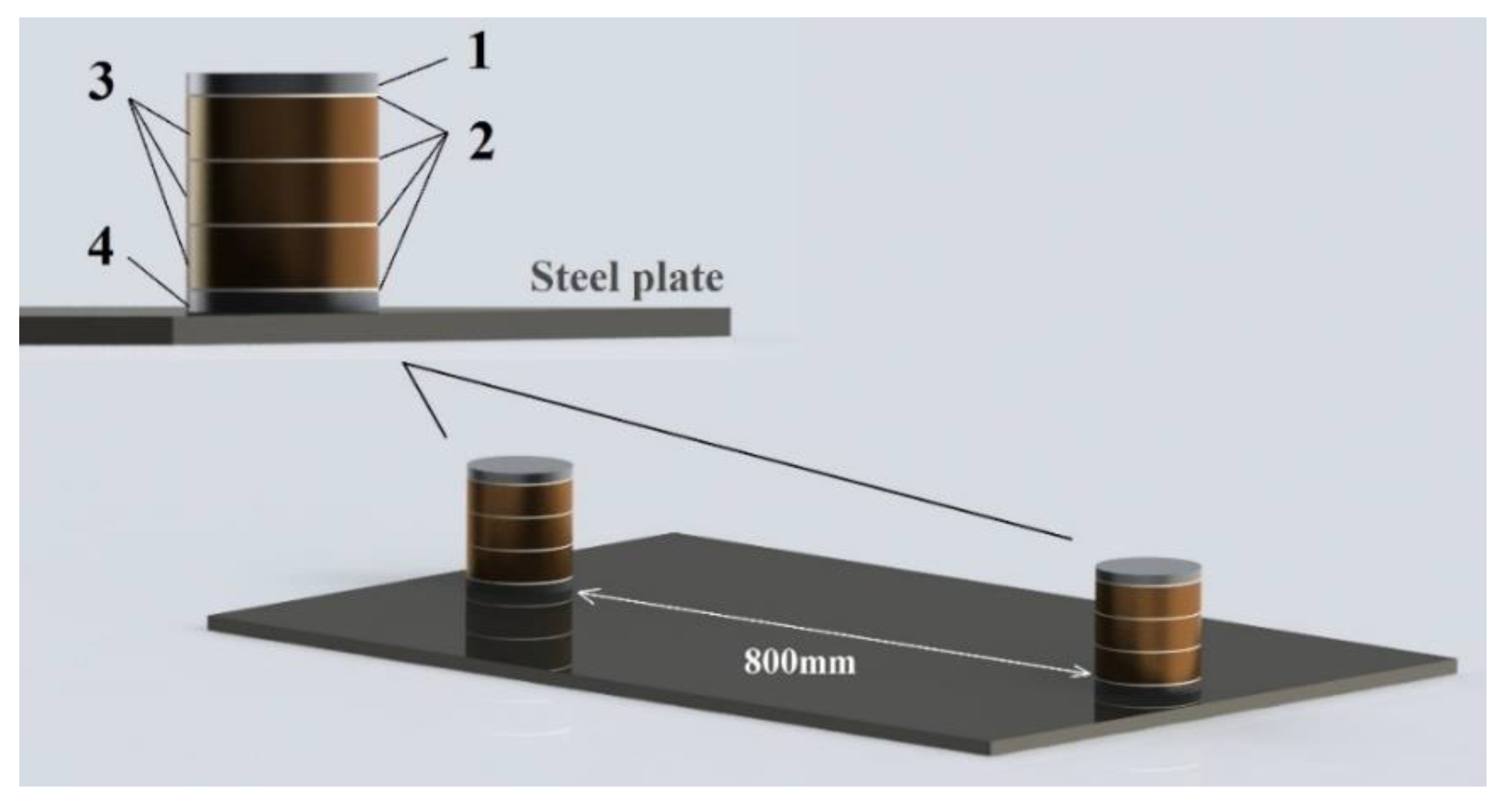
2.1. Methods and Materials
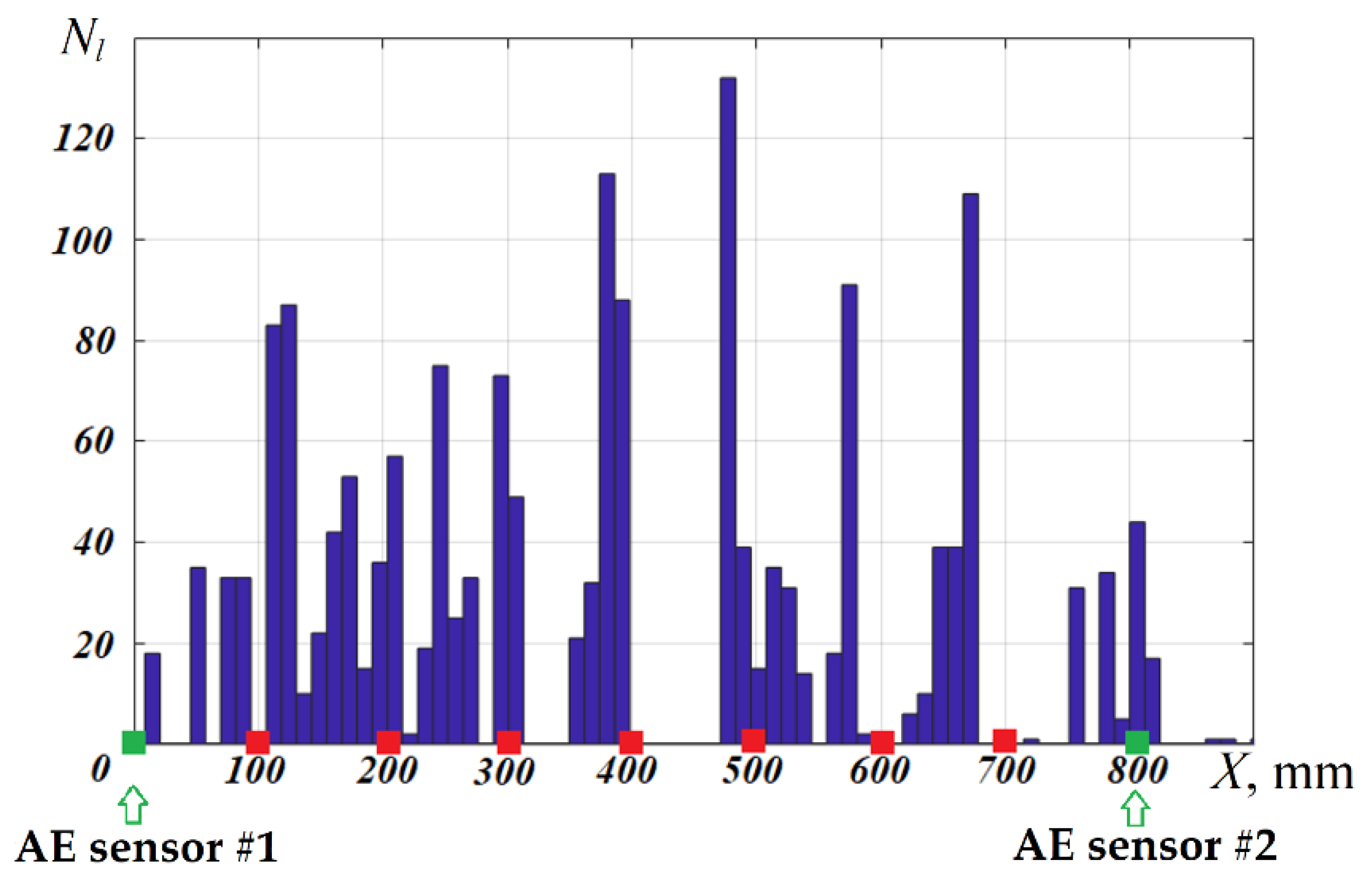
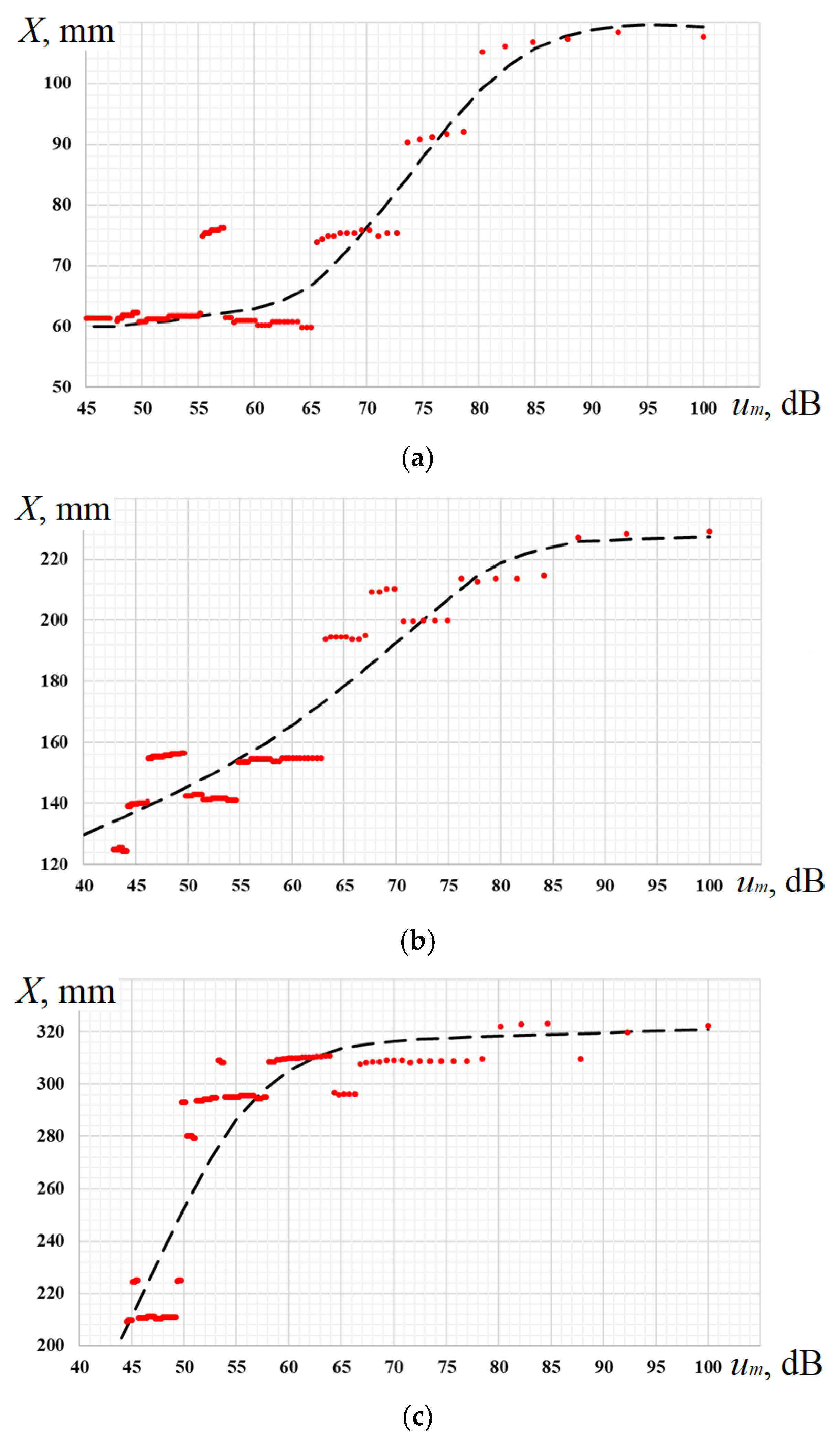
2.2. Experimental Results of Determining the AE Source Location on the Steel Plate
2.3. Experimental Results Discussion
3. FEM Analysis and Results
3.1. Methods and Materials
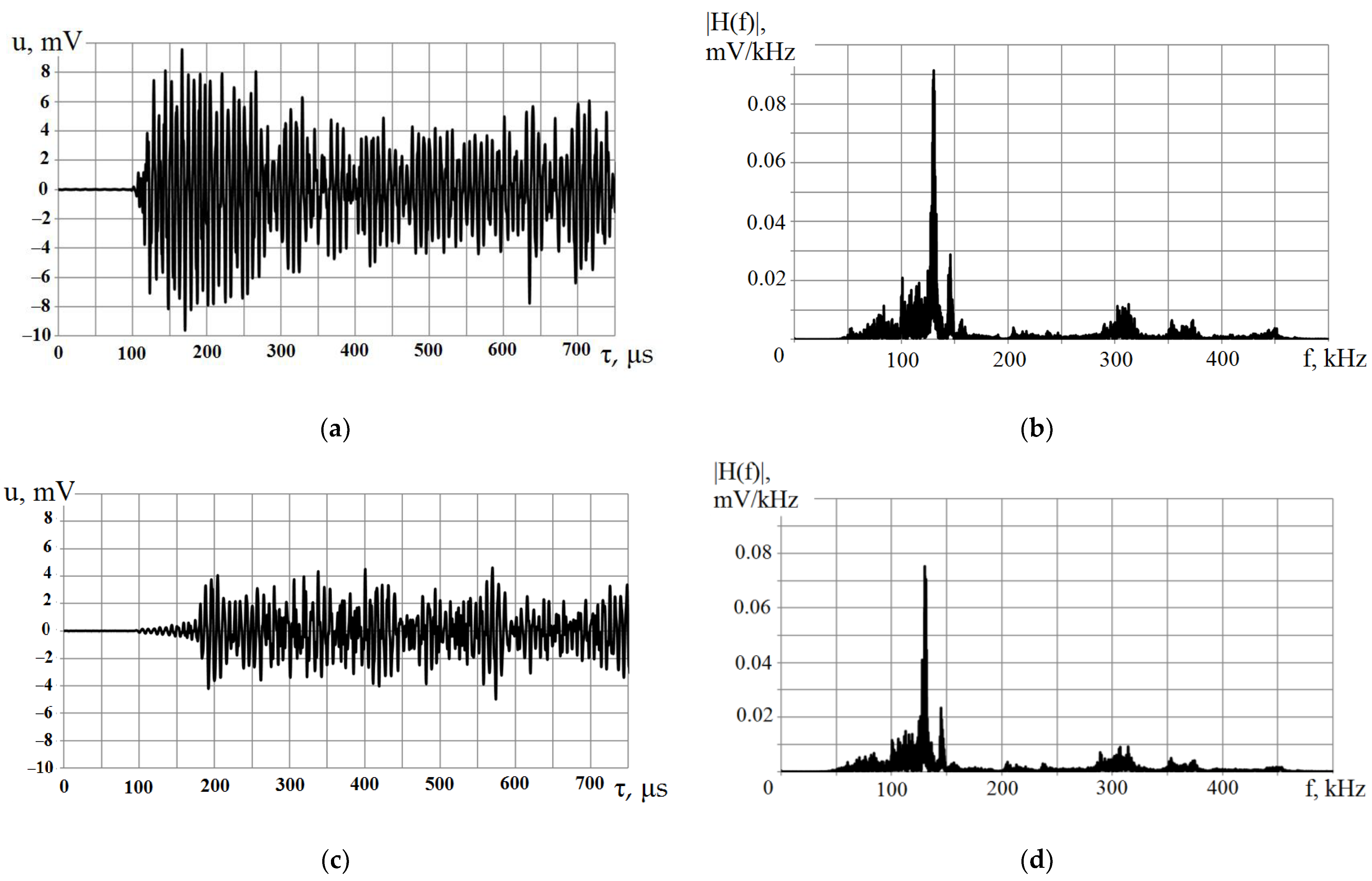
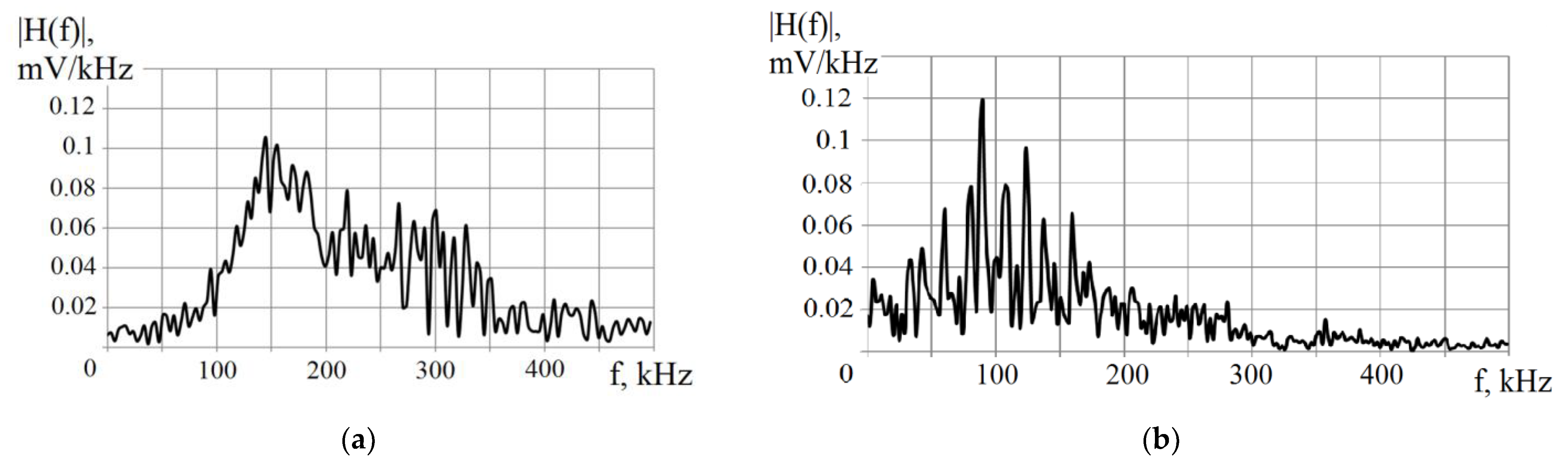
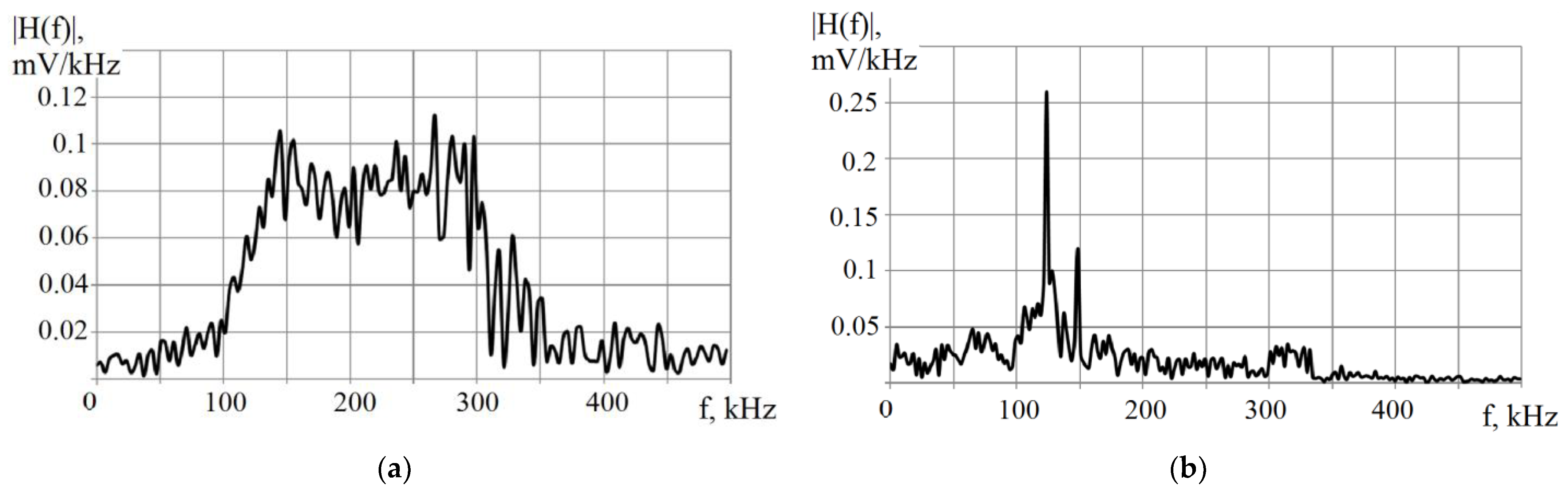
3.2. Finite-Element Model of AETs. Frequency Response Correspondence
3.3. Simulation Approach to Detect the AE Source Location
3.4. The Model Results of Linear Location Technique for AE Source Positioning
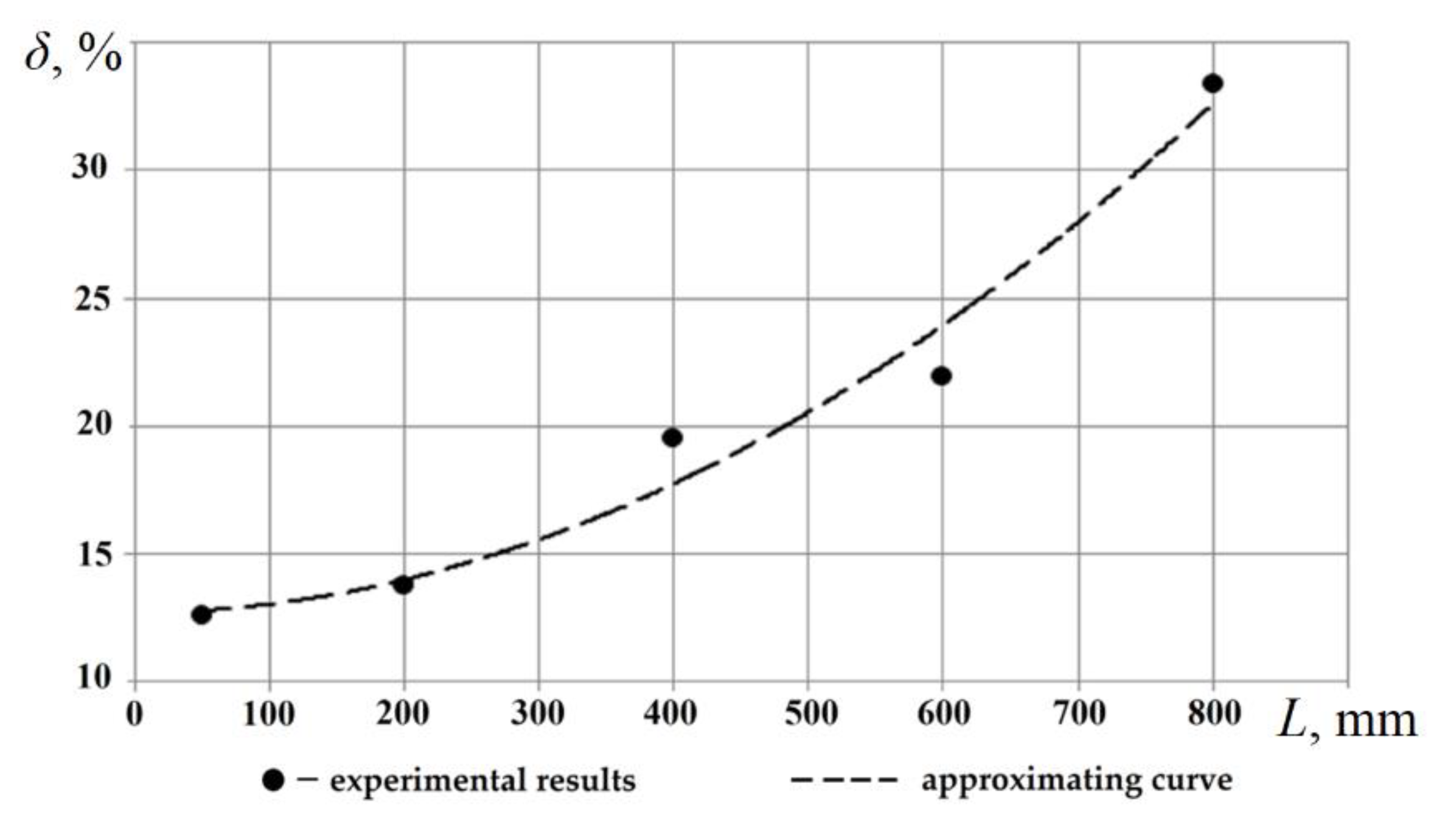
4. Comparison of the AE Source Positioning Error Obtained by the Experimental and Simulation Studies
5. Conclusions
- The influence of the acoustic dispersion on the reduced error of AE source location has been considered. AE monitoring was performed using a thresholding approach. The location error calculated at a distance of less than 100 mm from the AE transducer reached 15% in respect to the whole investigated area;
- Finite element modeling of AE signals allowed to estimate with high accuracy the positioning error of the linear location technique applied to determine the AE source coordinates;
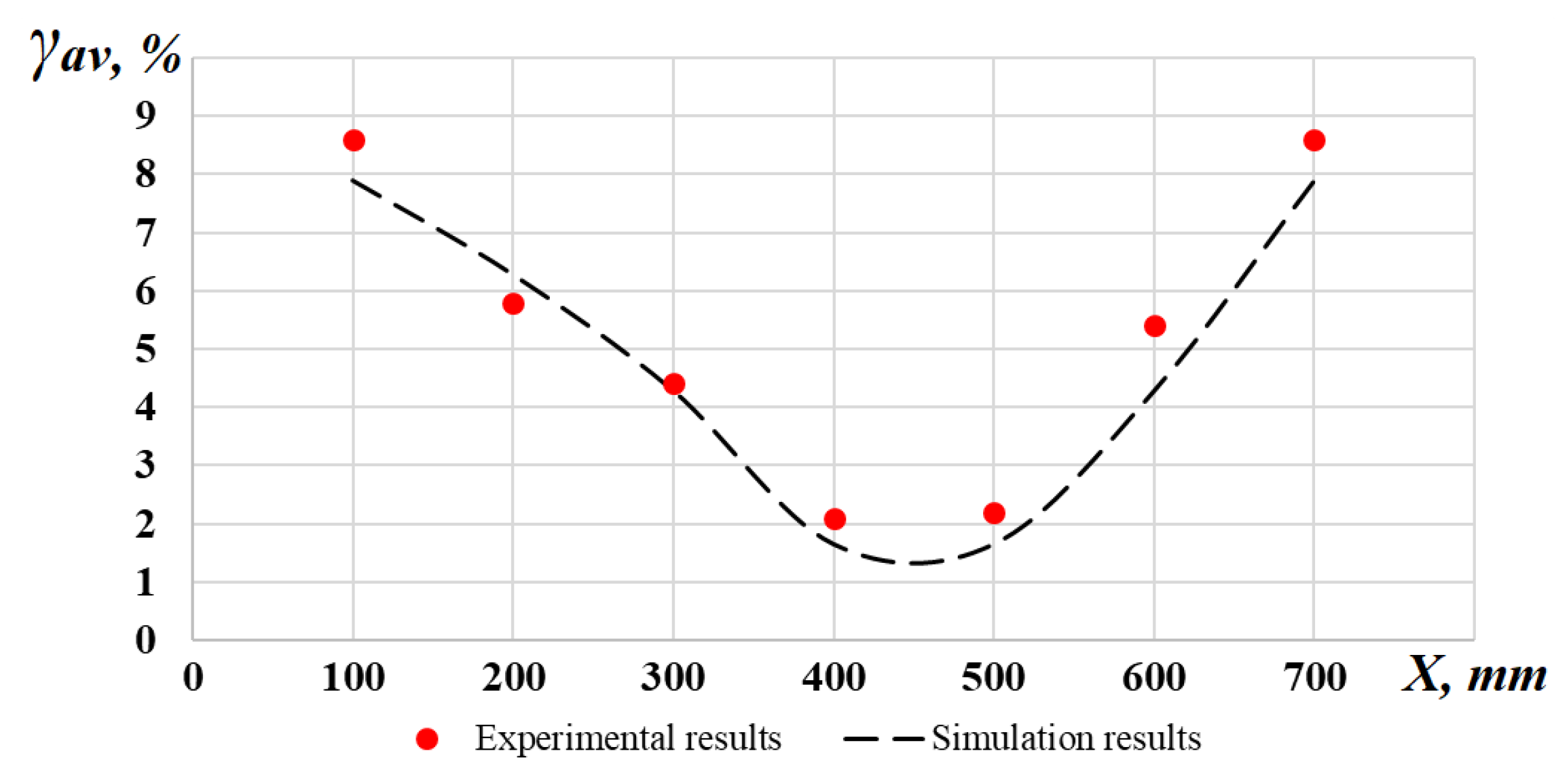
- The experimentally obtained data corresponded to the simulation results (see Figure 11). It implies that the developed FE model of acoustic wave propagation in a steel plate can be implemented to determine the AE source location with the required level of accuracy. Moreover, only a few preliminary tests should be carried out for a model construction;
- The optimization method for assessing the reduced error of the 1D linear location technique of AE sources consists of several stages. At the initial stage, it is necessary to generate acoustic signals of various amplitudes using an electronic simulator. Then it is alternately installed at a distance of 0.1 B and 0.3 B (B—distance between two AETs) relative to one of the receiving transducers. Based on the results of the two experiments, there is a need to evaluate the spectral characteristics of the recorded AE signals, as well as to construct FE models of receiving AEs. Finally, a comparison between the error obtained by simulation and the results of preliminary tests should be done.
- The obtained results can be effectively used in the framework of acoustic emission monitoring of isotropic metal structures. There are many more potential applications offering benefits to the diagnostics adopting this approach. Especially it concerns maintenance inspections of extended objects with complex geometry.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Grosse, C.U.; Ohtsu, M. Acoustic Emission Testing, Basics for Research; Applications in Civil Engineering, Springer: Leipzig, Germany, 2008; p. 414. [Google Scholar]
- Matvienko, Y.G.; Vasil’ev, I.E.; Chernov, D.V.; Ivanov, V.I.; Mishchenko, I.V. Error reduction in determining the wave-packet speed in composite materials. Instrum. Exp. Tech. 2020, 63, 106–111. [Google Scholar] [CrossRef]
- Mpalaskas, A.C.; Matikas, T.E.; Aggelis, D.G.; Alver, N. Acoustic Emission for Evaluating the Reinforcement Effectiveness in Steel Fiber Reinforced Concrete. Appl. Sci. 2021, 11, 3850. [Google Scholar] [CrossRef]
- Dixon, N.; Smith, A.; Flint, J.A.; Khanna, R.; Clark, B.; Andjelkovic, M. An acoustic emission landslide early warning system for communities in low-income and middle-income countries. Landslides 2018, 15, 1631–1644. [Google Scholar] [CrossRef] [Green Version]
- Zou, S.; Yan, F.; Yang, G.; Sun, W. The Identification of the Deformation Stage of a Metal Specimen Based on Acoustic Emission Data Analysis. Sensors 2017, 17, 789. [Google Scholar] [CrossRef] [Green Version]
- Vinogradov, A.; Danyuk, A.; Merson, D.; Yasnikov, I. Probing elementary dislocation mechanisms of local plastic deformation by the advanced acoustic emission technique. Scr. Mater. 2018, 151, 53–56. [Google Scholar] [CrossRef] [Green Version]
- Louda, P.; Sharko, A.; Stepanchikov, D. An Acoustic Emission Method for Assessing the Degree of Degradation of Mechanical Properties and Residual Life of Metal Structures under Complex Dynamic Deformation Stresses. Materials 2021, 14, 2090. [Google Scholar] [CrossRef]
- Ma, W.; Luo, H.; Han, Z.; Zhang, L.; Yang, X. The Influence of Different Microstructure on Tensile Deformation and Acoustic Emission Behaviors of Low-Alloy Steel. Materials 2020, 13, 4981. [Google Scholar] [CrossRef]
- Zhou, Z.-L.; Zhou, J.; Dong, L.-J.; Cai, X.; Rui, Y.-C.; Ke, C.-T. Experimental study on the location of an acoustic emission source considering refraction in different media. Sci. Rep. 2017, 7, 7472. [Google Scholar] [CrossRef] [Green Version]
- Baxter, M.; Pullin, R.; Holford, K.; Evans, S. Delta T source location for acoustic emission. Mech. Syst. Signal Processing 2007, 21, 1512–1520. [Google Scholar] [CrossRef]
- Al-Jumaili, S.; Pearson, M.; Holford, K.; Eaton, M.; Pullin, R. Acoustic emission source location in complex structures using full automatic delta T mapping technique. Mech. Syst. Signal Processing 2016, 72–73, 513–524. [Google Scholar] [CrossRef]
- Pullin, R.; Baxter, M.; Eaton, M.; Holford, K.; Evans, S. Novel acoustic emission source detection. J. Acoust. Emiss. 2007, 25, 215–223. [Google Scholar]
- Stepanova, L.N.; Kabanov, S.I.; Ramazanov, I.S.; Kanifadin, K.V. Analysis of errors in location of flaws in multipass welds using different clustering methods. Russ. J. Nondestruct. Test. 2017, 53, 96–103. [Google Scholar] [CrossRef]
- Chernyaeva, E.V.; Volkov, A.E.; Galkin, D.I.; Bigus, G.A.; Merson, D.L.; Bystrova, N.A. Evaluation of the condition of a metal using the acoustic-emission method: Prospects and problems. Russ. J. Nondestruct. Test. 2013, 49, 131–139. [Google Scholar] [CrossRef]
- Tang, J.; Wang, Y.; Li, J.; Wang, H.; Chen, G. In-situ monitoring and analysis of the pitting corrosion of carbon steel by acoustic emission. Appl. Sci. 2019, 9, 706. [Google Scholar] [CrossRef] [Green Version]
- Terentyev, D.A.; Popkov, Y.S. Determination of the parameters of the dispersion curves of Lamb waves with the use of the Hough transform of the spectrogram of an AE signal. Russ. J. Nondestruct. Test. 2014, 50, 19–28. [Google Scholar] [CrossRef]
- Lukonge, A.; Cao, X. Leak detection system for long-distance onshore and offshore gas pipeline using acoustic emission technology. A review. Trans. Indian Inst. Met. 2020, 73, 1715–1727. [Google Scholar] [CrossRef]
- Raghavendra, N.V. Engineering Metrology and Measurements; OUP India: New Delhi, India, 2013; p. 546. [Google Scholar]
- Skal’s’kyi, V.R.; Pochaps’kyi, E.P.; Klym, B.P.; Rudak, M.O.; Velykyi, P.P. Application of the method of magnetoelastic acoustic emission for the analysis of the technical state of 19g steel after long-term operation in an oil pipeline. Mater. Sci. 2016, 52, 385–389. [Google Scholar] [CrossRef]
- Matvienko, Y.G.; Vasiliev, I.E.; Chernov, D.V.; Marchenkov, A.Y. Diagnostics of welded joints in main pipelines equipment. Sci. Technol. Oil Oil Prod. Pipeline Transp. 2018, 8, 618–630. [Google Scholar] [CrossRef]
- Makhutov, N.A.; Vasil’iev, I.E.; Chernov, D.V.; Ivanov, V.I.; Elizarov, S.V. Influence of the passband of frequency filters on the parameters of acoustic emission pulses. Russ. J. Nondestruct. Test. 2019, 55, 173–180. [Google Scholar] [CrossRef]
- Gerasimov, S.I.; Sych, T.V. Finite element modeling of acoustic emission sensors. J. Phys. Conf. Ser. 2017, 881, 012003. [Google Scholar] [CrossRef] [Green Version]
- Junior, C.A.P.; Nascimento, V.H.; Lopes, C.G. Modeling time of arrival probability distribution and TDOA bias in acoustic emission testing. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 1122–1126. [Google Scholar]
- Sause, M.G.R.; Richer, S. Finite Element Modelling of Cracks as Acoustic Emission Sources. J. Nondestruct. Eval. 2015, 34, 4–17. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coordinates of AE Source X, mm | Amplitudes Interval of Recorded AE Signals [umin:umax], dB | Positioning Error γ, % | Average Positioning Error γav, % |
|---|---|---|---|
| 100 | [40:60] | 14.9 | 8.6 |
| [60:75] | 8.3 | ||
| [75:100] | 2.5 | ||
| 200 | [40:60] | 10.4 | 5.8 |
| [60:75] | 5.0 | ||
| [75:100] | 1.9 | ||
| 300 | [40:60] | 7.2 | 4.4 |
| [60:75] | 4.1 | ||
| [75:100] | 1.9 | ||
| 400 | [40:60] | 2.5 | 2.1 |
| [60:75] | 2.05 | ||
| [75:100] | 1.8 | ||
| 500 | [40:60] | 2.4 | 2.2 |
| [60:75] | 2.1 | ||
| [75:100] | 2.0 | ||
| 600 | [40:60] | 7.6 | 5.4 |
| [60:75] | 5.1 | ||
| [75:100] | 3.6 | ||
| 700 | [40:60] | 13.4 | 8.6 |
| [60:75] | 8.5 | ||
| [75:100] | 3.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marchenkov, A.; Vasiliev, I.; Chernov, D.; Zhgut, D.; Moskovskaya, D.; Mishchenko, I.; Kulikova, E. Estimation of Acoustic Source Positioning Error Determined by One-Dimensional Linear Location Technique. Appl. Sci. 2022, 12, 224. https://doi.org/10.3390/app12010224
Marchenkov A, Vasiliev I, Chernov D, Zhgut D, Moskovskaya D, Mishchenko I, Kulikova E. Estimation of Acoustic Source Positioning Error Determined by One-Dimensional Linear Location Technique. Applied Sciences. 2022; 12(1):224. https://doi.org/10.3390/app12010224
Chicago/Turabian StyleMarchenkov, Artem, Igor Vasiliev, Dmitriy Chernov, Daria Zhgut, Daria Moskovskaya, Ivan Mishchenko, and Ekaterina Kulikova. 2022. "Estimation of Acoustic Source Positioning Error Determined by One-Dimensional Linear Location Technique" Applied Sciences 12, no. 1: 224. https://doi.org/10.3390/app12010224
APA StyleMarchenkov, A., Vasiliev, I., Chernov, D., Zhgut, D., Moskovskaya, D., Mishchenko, I., & Kulikova, E. (2022). Estimation of Acoustic Source Positioning Error Determined by One-Dimensional Linear Location Technique. Applied Sciences, 12(1), 224. https://doi.org/10.3390/app12010224