
Human Pose Detection for Robotic-Assisted and Rehabilitation Environments




Abstract
Featured Application
Abstract
1. Introduction
2. Human Pose Detection and Body Feature Extraction: A State of the Art
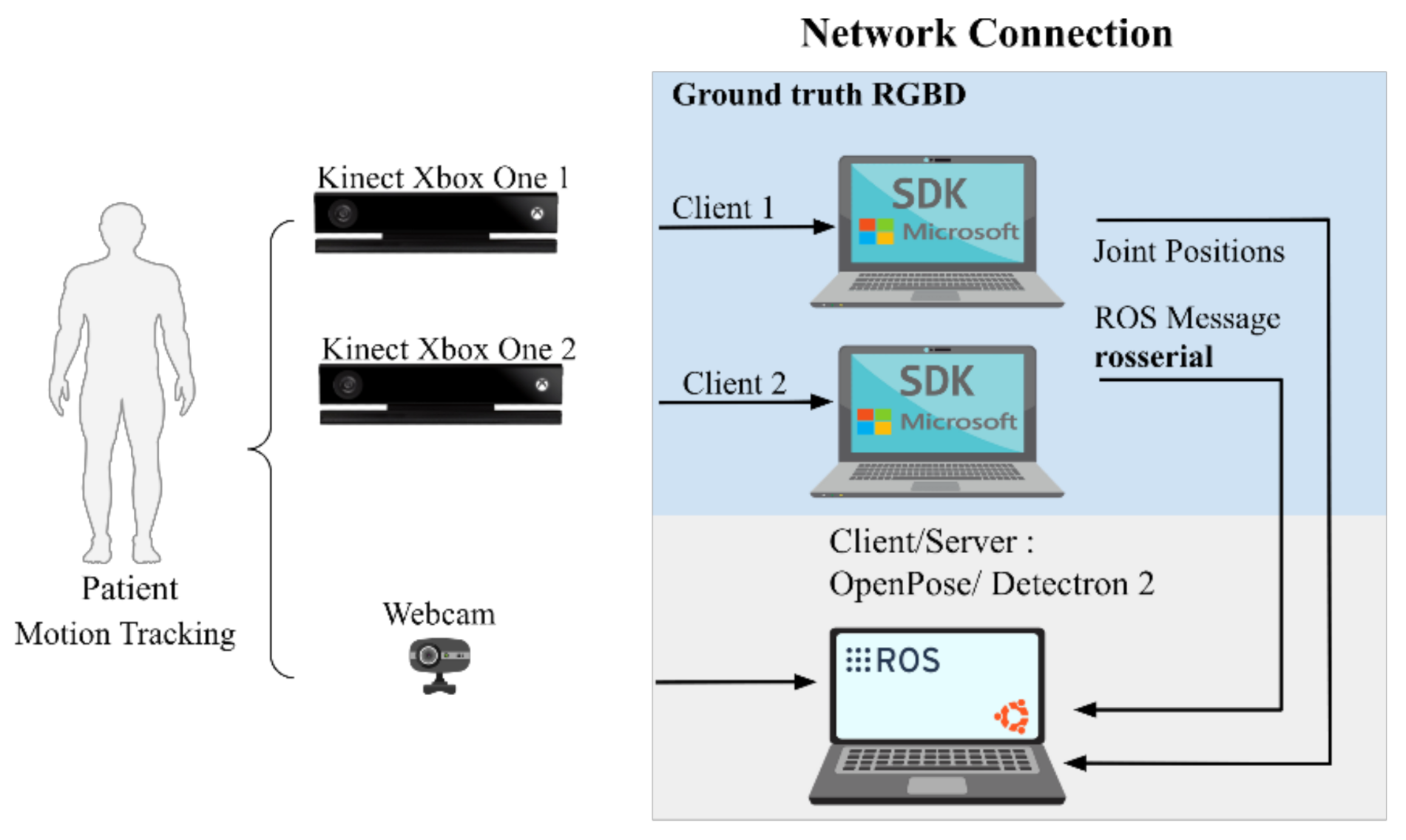
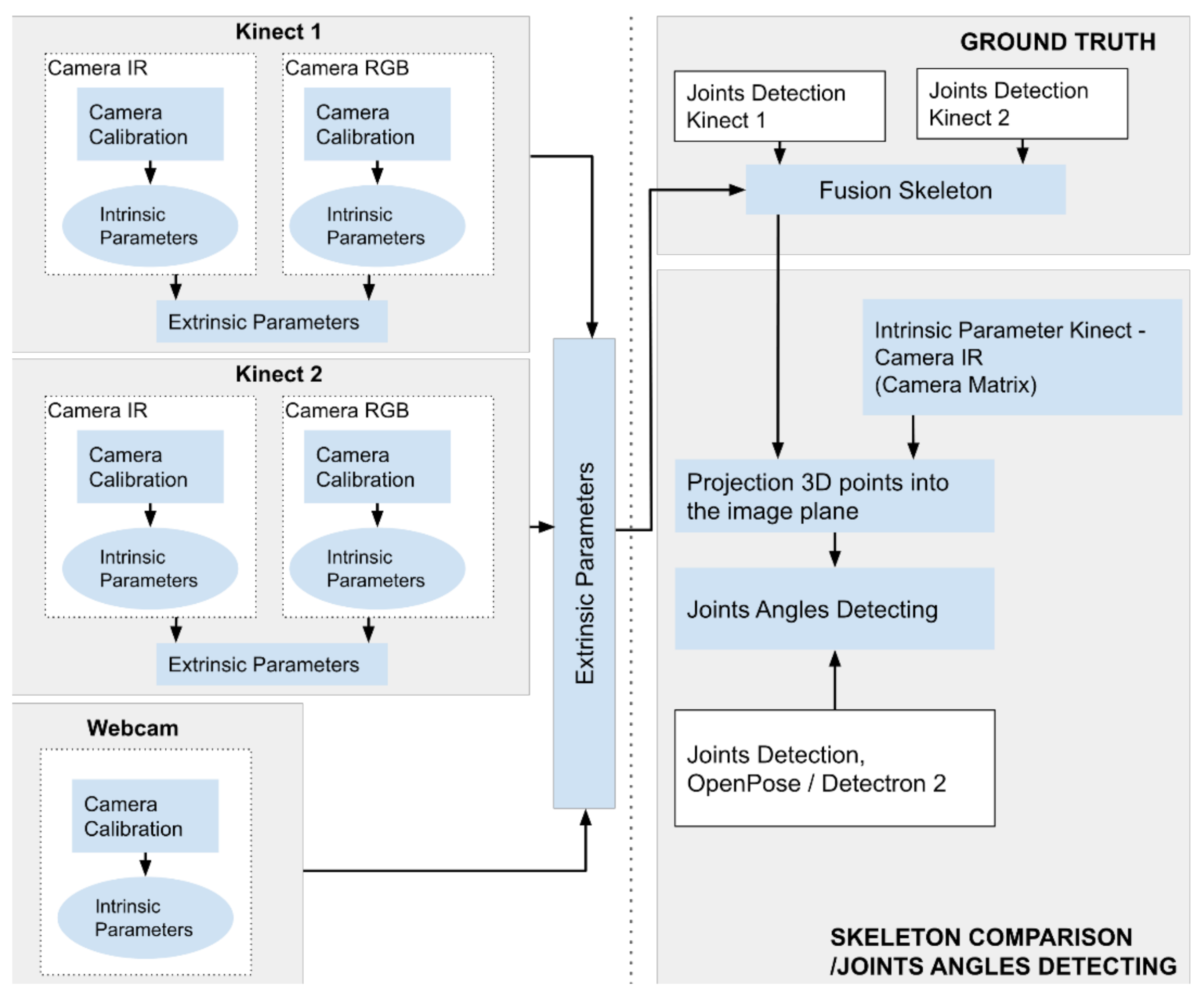
3. Materials and Methods
Cameras Calibration
4. Experimental Setup
4.1. Cameras Position
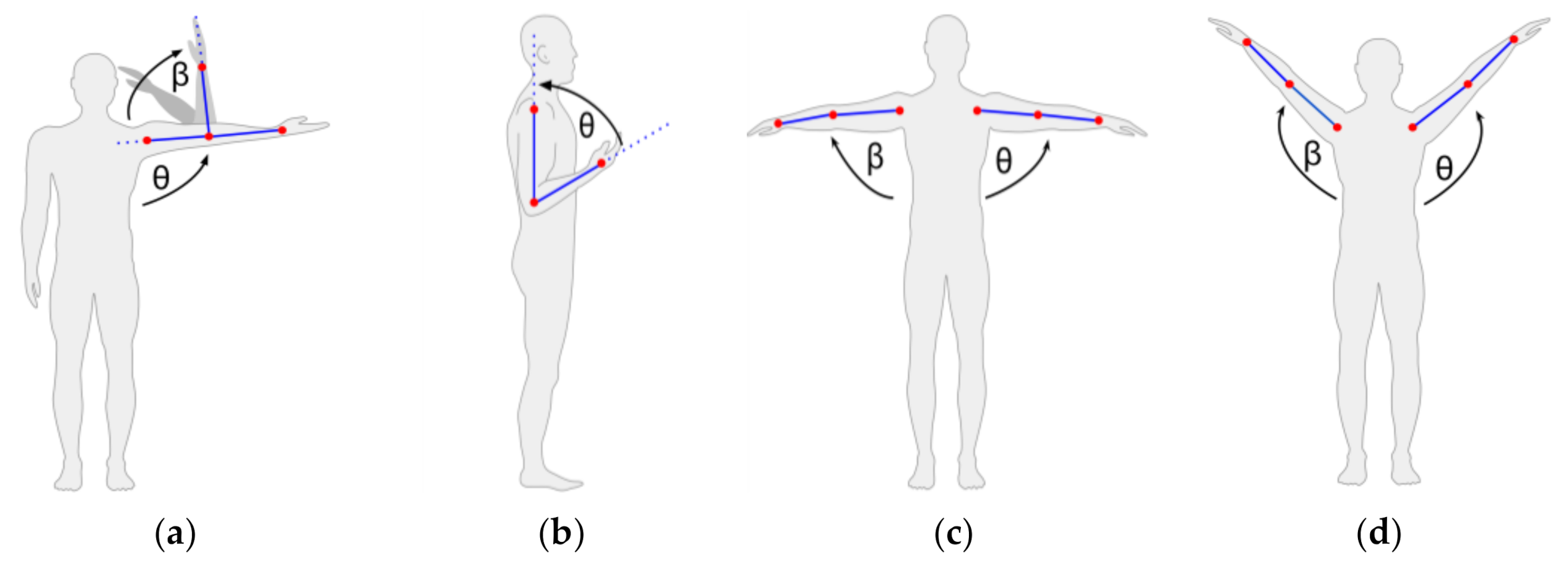
4.2. Joint Angle Measurement
4.3. Rehabilitation Exercises
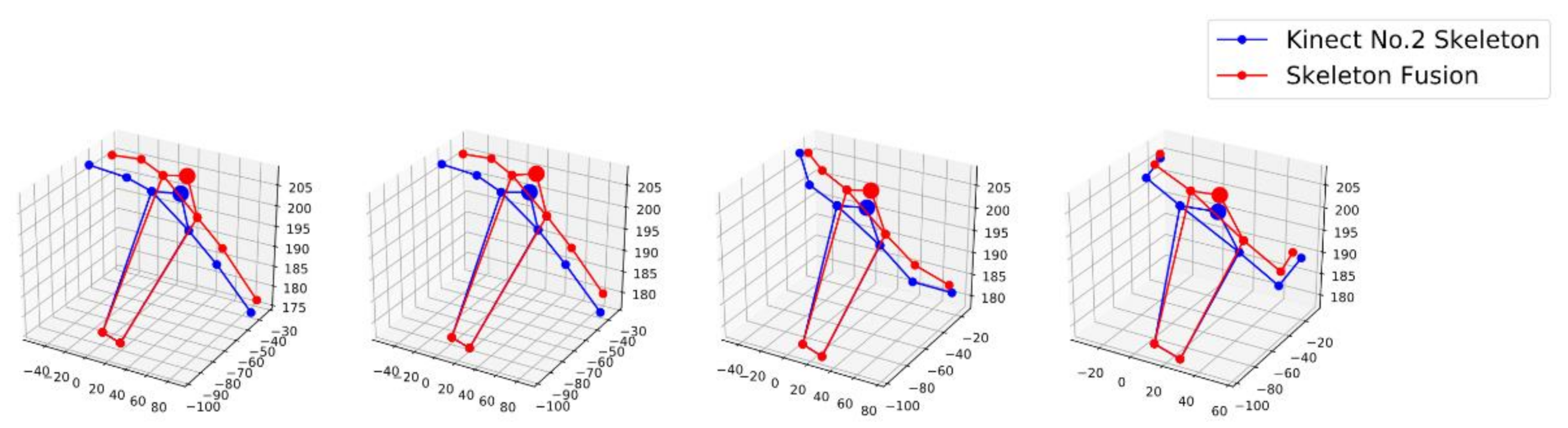
4.4. Ground Truth
5. Experiments
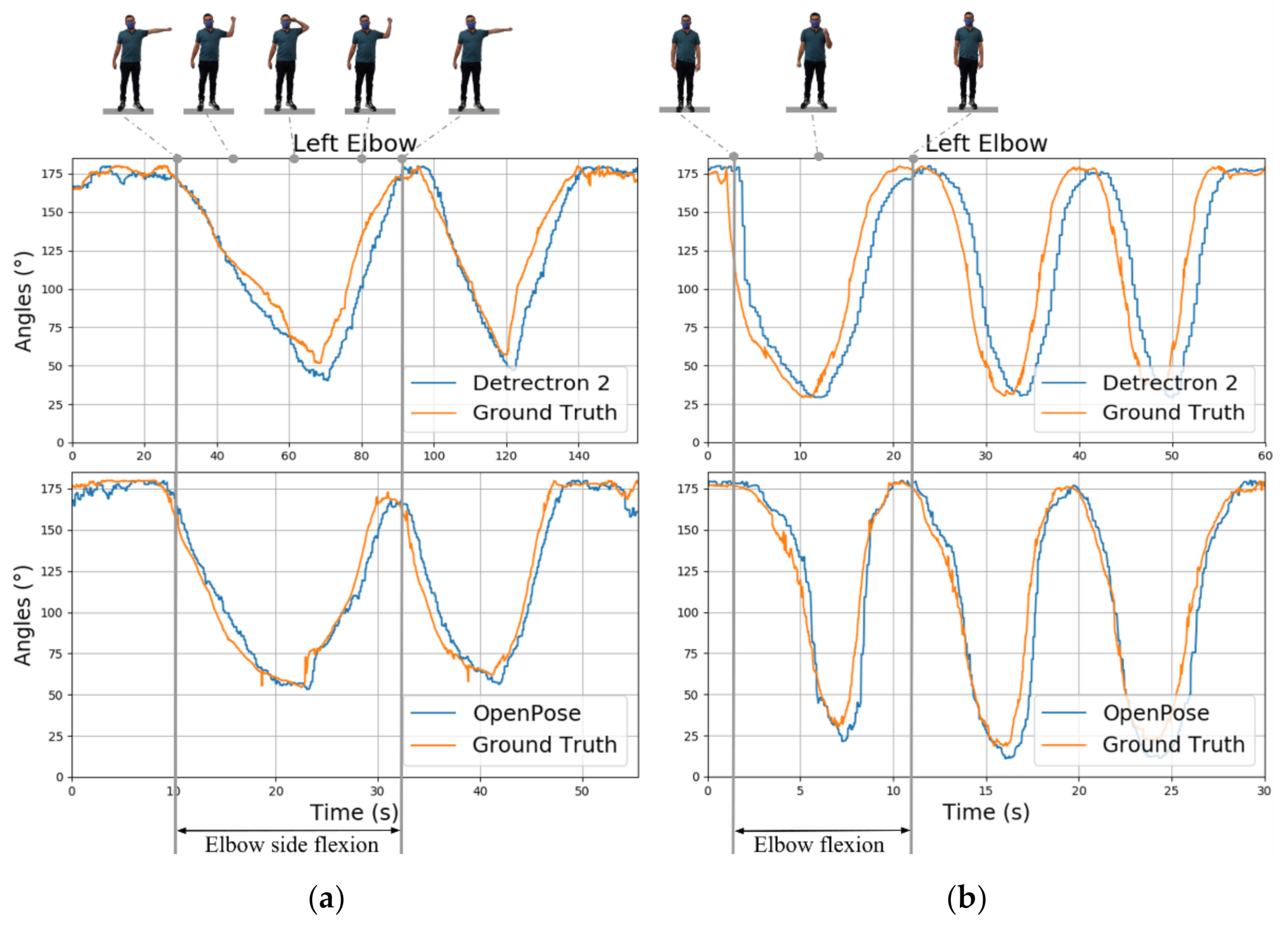
5.1. Exercise 1: Elbow Side Flexion
5.2. Exercise 2: Elbow Flexion
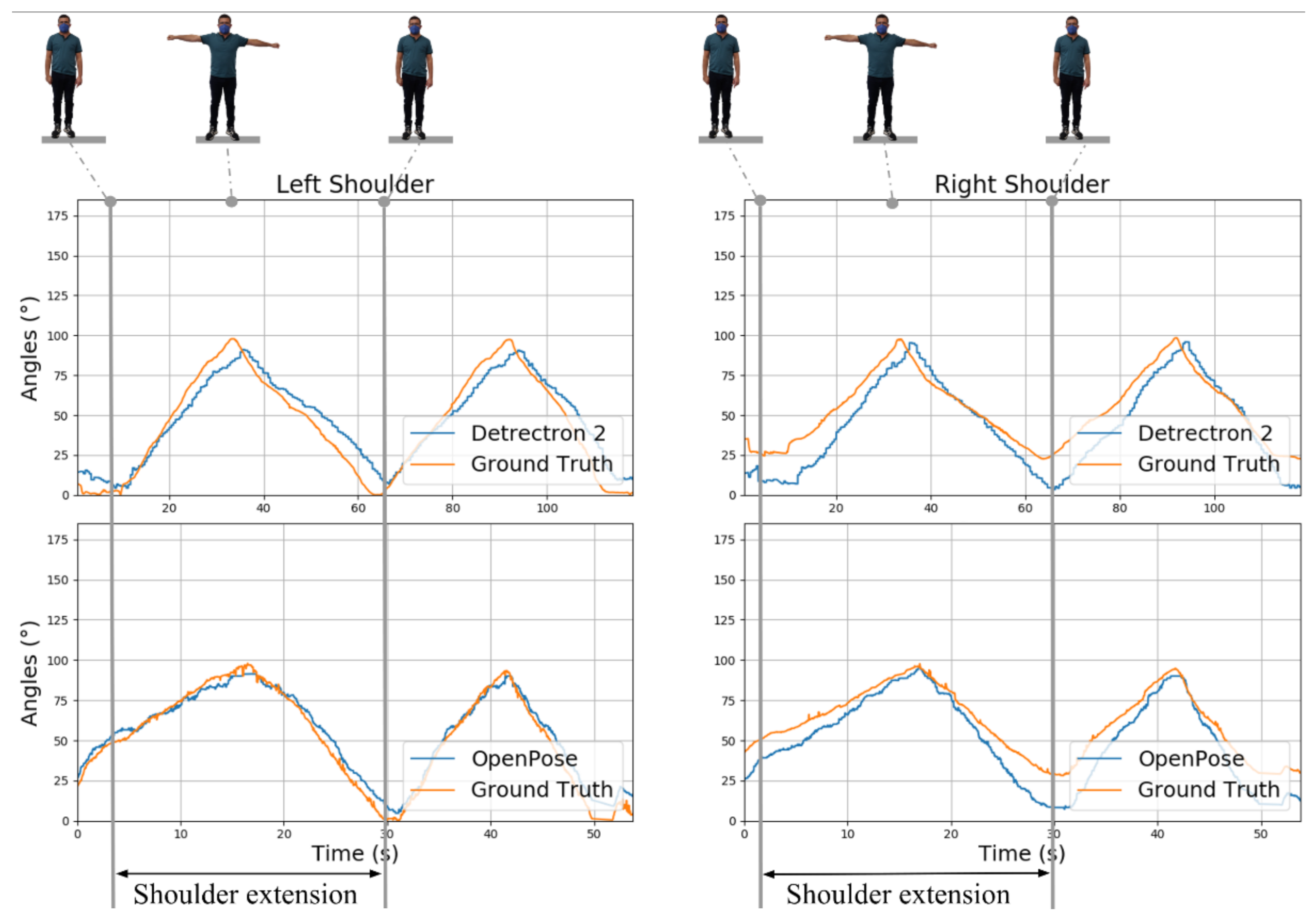
5.3. Exercise 3: Shoulder Extension
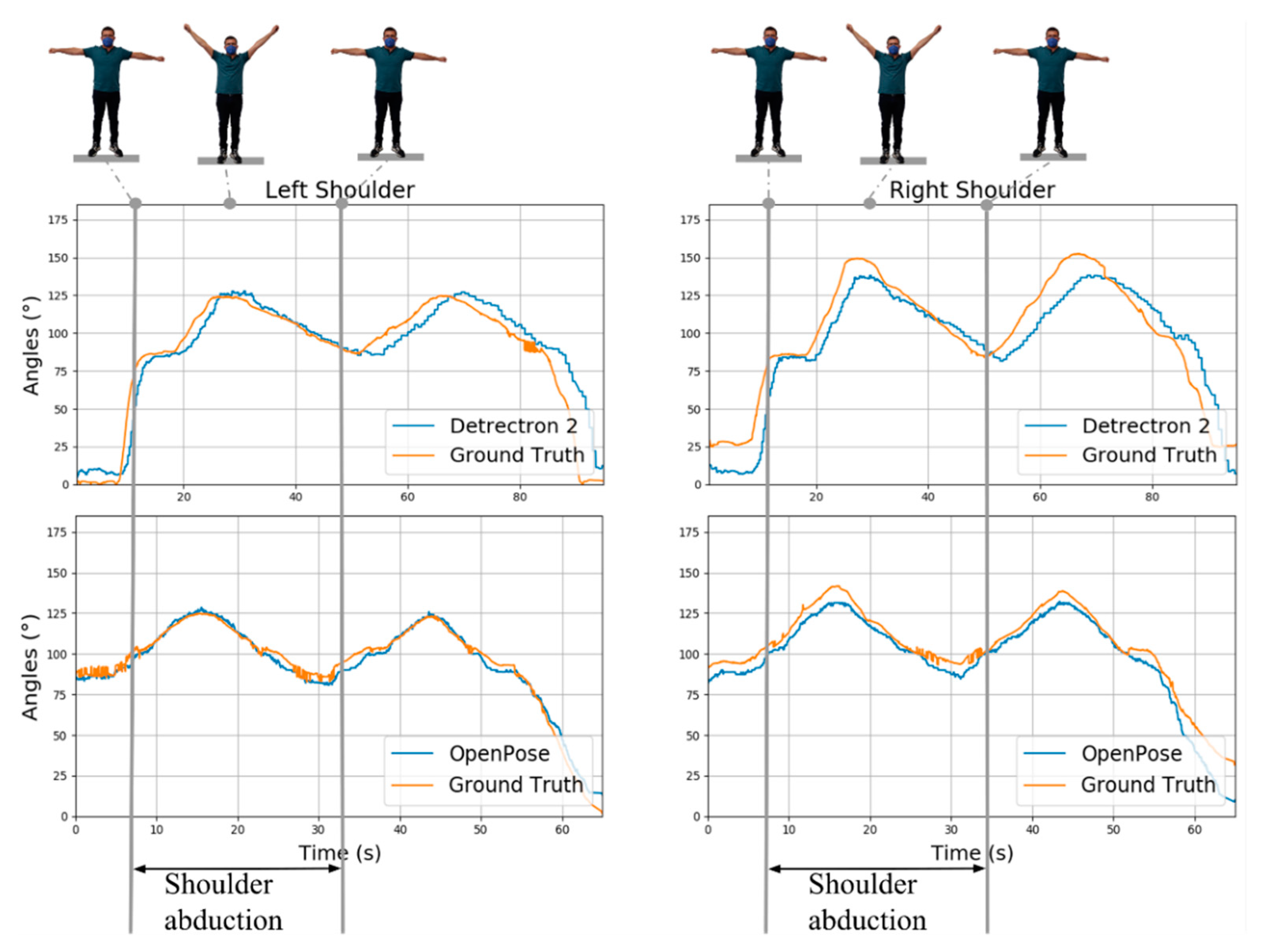
5.4. Exercise 4: Shoulder Abduction
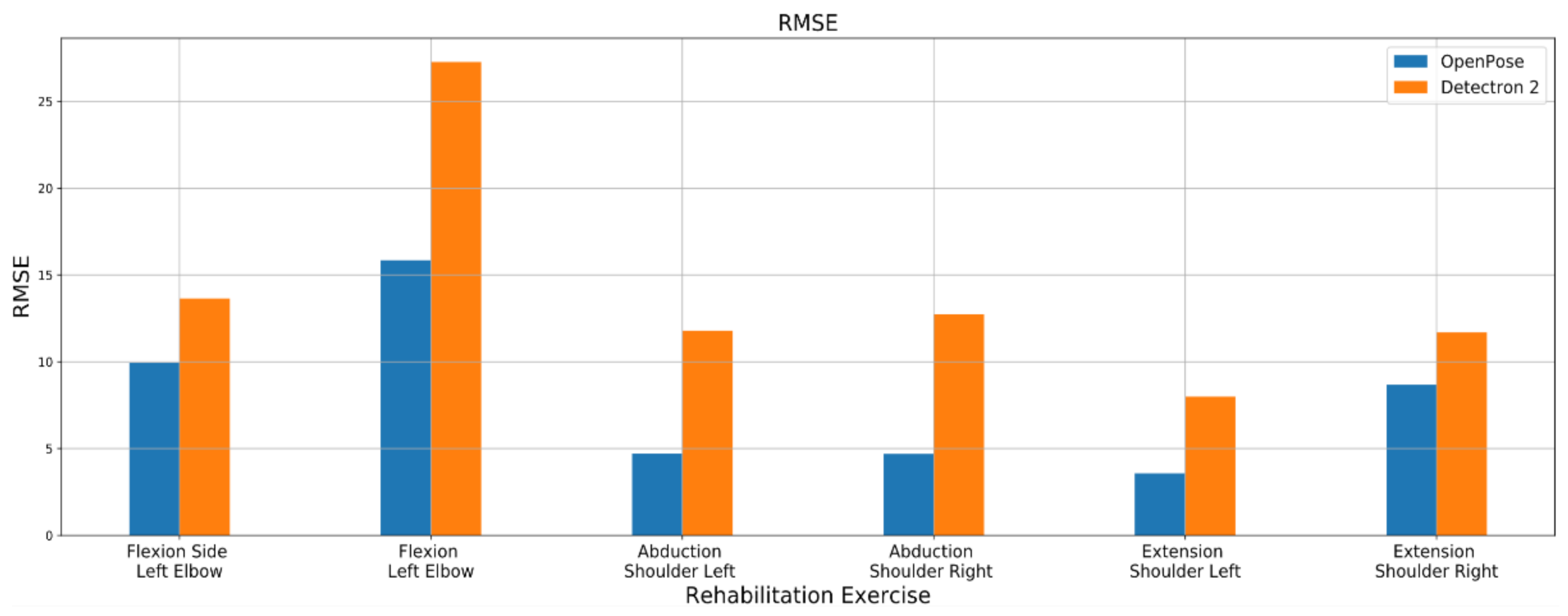
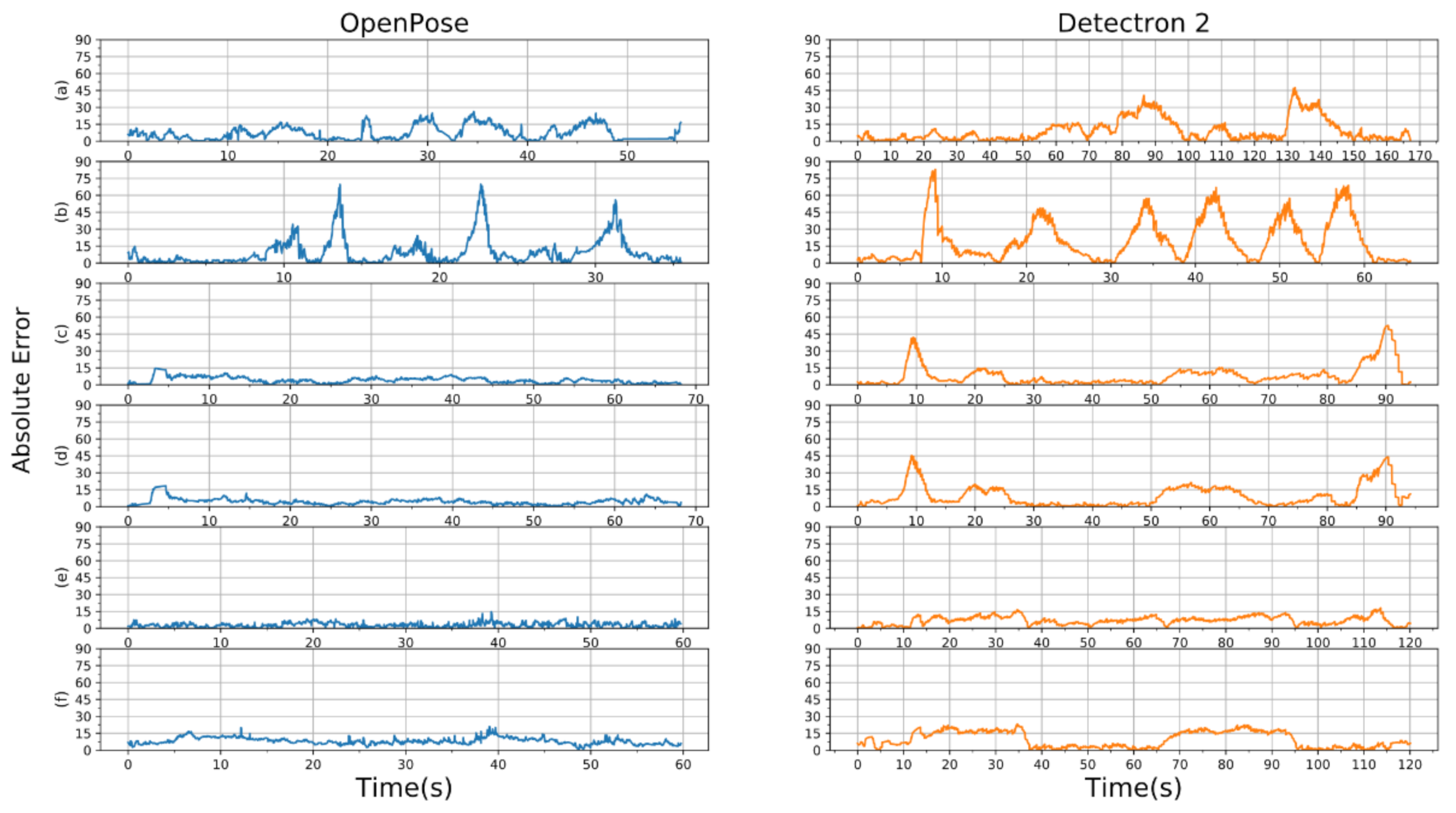
6. Results
7. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Olaronke, I.; Oluwaseun, O.; Rhoda, I. State of The Art: A Study of Human-Robot Interaction in Healthcare. Int. J. Inf. Eng. Electron. Bus. 2017, 9, 43–55. [Google Scholar] [CrossRef]
- Claflin, E.S.; Krishnan, C.; Khot, S.P. Emerging Treatments for Motor Rehabilitation after Stroke. Neurohospitalist 2015, 5, 77–88. [Google Scholar] [CrossRef] [PubMed]
- Krebs, H.I.; Volpe, B.T.; Ferraro, M.; Fasoli, S.; Palazzolo, J.; Rohrer, B.; Edelstein, L.; Hogan, N. Robot-Aided Neuro-Rehabilitation: From Evidence-Based to Science-Based Rehabilitation. In Topics in Stroke Rehabilitation; Thomas Land Publishers Inc.: St. Louis, MO, USA, 2002; pp. 54–70. [Google Scholar] [CrossRef]
- Burgar, C.G.; Lum, P.S.; Shor, P.C.; Van Der Loos, H.F.M. Development of Robots for Rehabilitation Therapy: The Palo Alto VA/Stanford Experience. J. Rehabil. Res. Dev. 2000, 37, 663–673. [Google Scholar] [PubMed]
- Igo Krebs, H.; Hogan, N.; Aisen, M.L.; Volpe, B.T. Robot-Aided Neurorehabilitation. IEEE Trans. Rehabil. Eng. 1998, 6, 75–87. [Google Scholar] [CrossRef] [PubMed]
- Lum, P.S.; Burgar, C.G.; Shor, P.C.; Majmundar, M.; Van der Loos, M. Robot-Assisted Movement Training Compared with Conventional Therapy Techniques for the Rehabilitation of Upper-Limb Motor Function after Stroke. Arch. Phys. Med. Rehabil. 2002, 83, 952–959. [Google Scholar] [CrossRef] [PubMed]
- Reinkensmeyer, D.J.; Kahn, L.E.; Averbuch, M.; McKenna-Cole, A.; Schmit, B.D.; Zev Rymer, W. Understanding and Treating Arm Movement Impairment after Chronic Brain Injury: Progress with the ARM Guide. J. Rehabil. Res. Dev. 2000, 37, 653–662. [Google Scholar] [PubMed]
- Richardson, R.; Brown, M.; Bhakta, B.; Levesley, M.C. Design and Control of a Three Degree of Freedom Pneumatic Physiotherapy Robot. Robotica 2003, 21, 589–604. [Google Scholar] [CrossRef]
- Zhu, T.L.; Klein, J.; Dual, S.A.; Leong, T.C.; Burdet, E. ReachMAN2: A Compact Rehabilitation Robot to Train Reaching and Manipulation. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2107–2113. [Google Scholar] [CrossRef]
- Lioulemes, A.; Theofanidis, M.; Kanal, V.; Tsiakas, K.; Abujelala, M.; Collander, C.; Townsend, W.B.; Boisselle, A.; Makedon, F. MAGNI Dynamics: A Vision-Based Kinematic and Dynamic Upper-Limb Model for Intelligent Robotic Rehabilitation. Int. J. Biomed. Biol. Eng. 2017, 11, 158–167. [Google Scholar]
- Park, D.; Kim, H.; Kemp, C.C. Multimodal Anomaly Detection for Assistive Robots. Auton. Robot. 2019, 43, 611–629. [Google Scholar] [CrossRef]
- Sarafianos, N.; Boteanu, B.; Ionescu, B.; Kakadiaris, I.A. 3D Human Pose Estimation: A Review of the Literature and Analysis of Covariates. Comput. Vis. Image Underst. 2016, 152, 1–20. [Google Scholar] [CrossRef]
- Lioulemes, A.; Theofanidis, M.; Makedon, F. Quantitative Analysis of the Human Upper-Limp Kinematic Model for Robot-Based Rehabilitation Applications. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Fort Worth, TX, USA, 21–24 August 2016; pp. 1061–1066. [Google Scholar] [CrossRef]
- Di Nardo, M. Developing a Conceptual Framework Model of Industry 4.0 for Industrial Management. Ind. Eng. Manag. Syst. 2020, 19, 551–560. [Google Scholar] [CrossRef]
- Brito, T.; Lima, J.; Costa, P.; Matellán, V.; Braun, J. Collision Avoidance System with Obstacles and Humans to Collaborative Robots Arms Based on RGB-D Data. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2020; Volume 1092 AISC, pp. 331–342. [Google Scholar] [CrossRef]
- Leardini, A.; Lullini, G.; Giannini, S.; Berti, L.; Ortolani, M.; Caravaggi, P. Validation of the Angular Measurements of a New Inertial-Measurement-Unit Based Rehabilitation System: Comparison with State-of-the-Art Gait Analysis. J. Neuroeng. Rehabil. 2014, 11, 136. [Google Scholar] [CrossRef] [PubMed]
- Home-Xsens 3D Motion Tracking. Available online: https://www.xsens.com/ (accessed on 13 April 2021).
- Mündermann, L.; Corazza, S.; Andriacchi, T.P. The Evolution of Methods for the Capture of Human Movement Leading to Markerless Motion Capture for Biomechanical Applications. J. Neuroeng. Rehabil. 2006, 3, 6. [Google Scholar] [CrossRef] [PubMed]
- Smisek, J.; Jancosek, M.; Pajdla, T. 3D with Kinect. In Consumer Depth Cameras for Computer Vision; Springer: London, UK, 2013; pp. 3–25. [Google Scholar] [CrossRef]
- Shotton, J.; Fitzgibbon, A.; Cook, M.; Sharp, T.; Finocchio, M.; Moore, R.; Kipman, A.; Blake, A. Real-Time Human Pose Recognition in Parts from Single Depth Images. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Colorado Springs, CO, USA, 20–25 June 2011; pp. 1297–1304. [Google Scholar] [CrossRef]
- Ganapathi, V.; Plagemann, C.; Koller, D.; Thrun, S. Real Time Motion Capture Using a Single Time-of-Flight Camera. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 755–762. [Google Scholar] [CrossRef]
- Baak, A.; Müller, M.; Bharaj, G.; Seidel, H.-P.; Theobalt, C. A Data-Driven Approach for Real-Time Full Body Pose Reconstruction from a Depth Camera; Springer: London, UK, 2013; pp. 71–98. [Google Scholar] [CrossRef]
- Pavllo, D.; Zürich, E.; Feichtenhofer, C.; Grangier, D.; Brain, G.; Auli, M. 3D Human Pose Estimation in Video with Temporal Convolutions and Semi-Supervised Training. In Proceedings of the 2019 Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019. [Google Scholar]
- Moon, G.; Chang, J.Y.; Lee, K.M. Camera Distance-Aware Top-down Approach for 3D Multi-Person Pose Estimation from a Single RGB Image. In Proceedings of the International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019. [Google Scholar]
- Seethapathi, N.; Wang, S.; Saluja, R.; Blohm, G.; Kording, K.P. Movement Science Needs Different Pose Tracking Algorithms. arXiv 2019, arXiv:1907.10226. [Google Scholar]
- Wang, Q.; Kurillo, G.; Ofli, F.; Bajcsy, R. Evaluation of Pose Tracking Accuracy in the First and Second Generations of Microsoft Kinect. In Proceedings of the 2015 IEEE International Conference on Healthcare Informatics, ICHI 2015, Dallas, TX, USA, 21–23 October 2015; pp. 380–389. [Google Scholar] [CrossRef]
- Ma, M.; Proffitt, R.; Skubic, M. Validation of a Kinect V2 Based Rehabilitation Game. PLoS ONE 2018, 13, e0202338. [Google Scholar] [CrossRef]
- GitHub-CMU-Perceptual-Computing-Lab/Openpose: OpenPose: Real-Time Multi-Person Keypoint Detection Library for Body, Face, Hands, and Foot Estimation. Available online: https://github.com/CMU-Perceptual-Computing-Lab/openpose (accessed on 24 March 2020).
- Wu, Y.; Kirillov, A.; Massa, F.; Lo, W.-Y.; Girshick, R. Detectron2. Available online: https://github.com/facebookresearch/detectron2 (accessed on 21 November 2020).
- Cao, Z.; Simon, T.; Wei, S.-E.; Sheikh, Y. Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Viswakumar, A.; Rajagopalan, V.; Ray, T.; Parimi, C. Human Gait Analysis Using OpenPose. In Proceedings of the 2019 Fifth International Conference on Image Information Processing (ICIIP), Shimla, India, 15–17 November 2019; pp. 310–314. [Google Scholar] [CrossRef]
- Pasinetti, S.; Muneeb Hassan, M.; Eberhardt, J.; Lancini, M.; Docchio, F.; Sansoni, G. Performance Analysis of the PMD Camboard Picoflexx Time-of-Flight Camera for Markerless Motion Capture Applications. IEEE Trans. Instrum. Meas. 2019, 68, 4456–4471. [Google Scholar] [CrossRef]
- Albert, J.A.; Owolabi, V.; Gebel, A.; Brahms, C.M.; Granacher, U.; Arnrich, B. Evaluation of the Pose Tracking Performance of the Azure Kinect and Kinect v2 for Gait Analysis in Comparison with a Gold Standard: A Pilot Study. Sensors 2020, 20, 5104. [Google Scholar] [CrossRef] [PubMed]
- Rosserial_Windows—ROS Wiki. Available online: http://wiki.ros.org/rosserial_windows (accessed on 14 March 2021).
- OpenCV: Camera Calibration and 3D Reconstruction. Available online: https://docs.opencv.org/master/d9/d0c/group__calib3d.html (accessed on 14 March 2021).
- Du, H.; Zhao, Y.; Han, J.; Wang, Z.; Song, G. Data Fusion of Multiple Kinect Sensors for a Rehabilitation System. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS, Orlando, FL, USA, 16–20 August 2016; pp. 4869–4872. [Google Scholar] [CrossRef]
- Jiang, Y.; Song, K.; Wang, J. Action Recognition Based on Fusion Skeleton of Two Kinect Sensors. In Proceedings of the 2020 International Conference on Culture-Oriented Science and Technology, ICCST 2020, Beijing, China, 28–31 October 2020; pp. 240–244. [Google Scholar] [CrossRef]
- Human Pose Estimation by the OpenPose and Detectron 2—YouTube. Available online: https://www.youtube.com/watch?v=uwnrbqmns0Y (accessed on 24 March 2021).
- Lavernia, C.; D’Apuzzo, M.; Rossi, M.D.; Lee, D. Accuracy of Knee Range of Motion Assessment After Total Knee Arthroplasty. J. Arthroplast. 2008, 23, 85–91. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Server-Client | Client 2 | Client 3 | |
|---|---|---|---|
| OS | Ubuntu 18.04.03 Desktop (64 bit), (Canonical, London, UK) | Windows 10 Pro (64 bit), (Microsoft, Albuquerque, NM, USA) | Windows 10 Pro (64 bit) |
| Processor | Intel® Core™ i7-9750, (Intel, Santa Clara, CA, USA) | Intel® Core™ i5-8250U | Intel® Core™ i7-4700MQ |
| Memory | 16 GB | 16 GB | 16 GB |
| GPU | NVIDIA GeForce GTX 1650 GDDR5 @4 GB (128 bits), (NVIDIA, Santa Clara, CA, USA) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández, Ó.G.; Morell, V.; Ramon, J.L.; Jara, C.A. Human Pose Detection for Robotic-Assisted and Rehabilitation Environments. Appl. Sci. 2021, 11, 4183. https://doi.org/10.3390/app11094183
Hernández ÓG, Morell V, Ramon JL, Jara CA. Human Pose Detection for Robotic-Assisted and Rehabilitation Environments. Applied Sciences. 2021; 11(9):4183. https://doi.org/10.3390/app11094183
Chicago/Turabian StyleHernández, Óscar G., Vicente Morell, José L. Ramon, and Carlos A. Jara. 2021. "Human Pose Detection for Robotic-Assisted and Rehabilitation Environments" Applied Sciences 11, no. 9: 4183. https://doi.org/10.3390/app11094183
APA StyleHernández, Ó. G., Morell, V., Ramon, J. L., & Jara, C. A. (2021). Human Pose Detection for Robotic-Assisted and Rehabilitation Environments. Applied Sciences, 11(9), 4183. https://doi.org/10.3390/app11094183