
Development of Highly Sensitive Temperature Microsensors for Localized Measurements

 ,
,  ,
,  ,
,  and
and 
Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
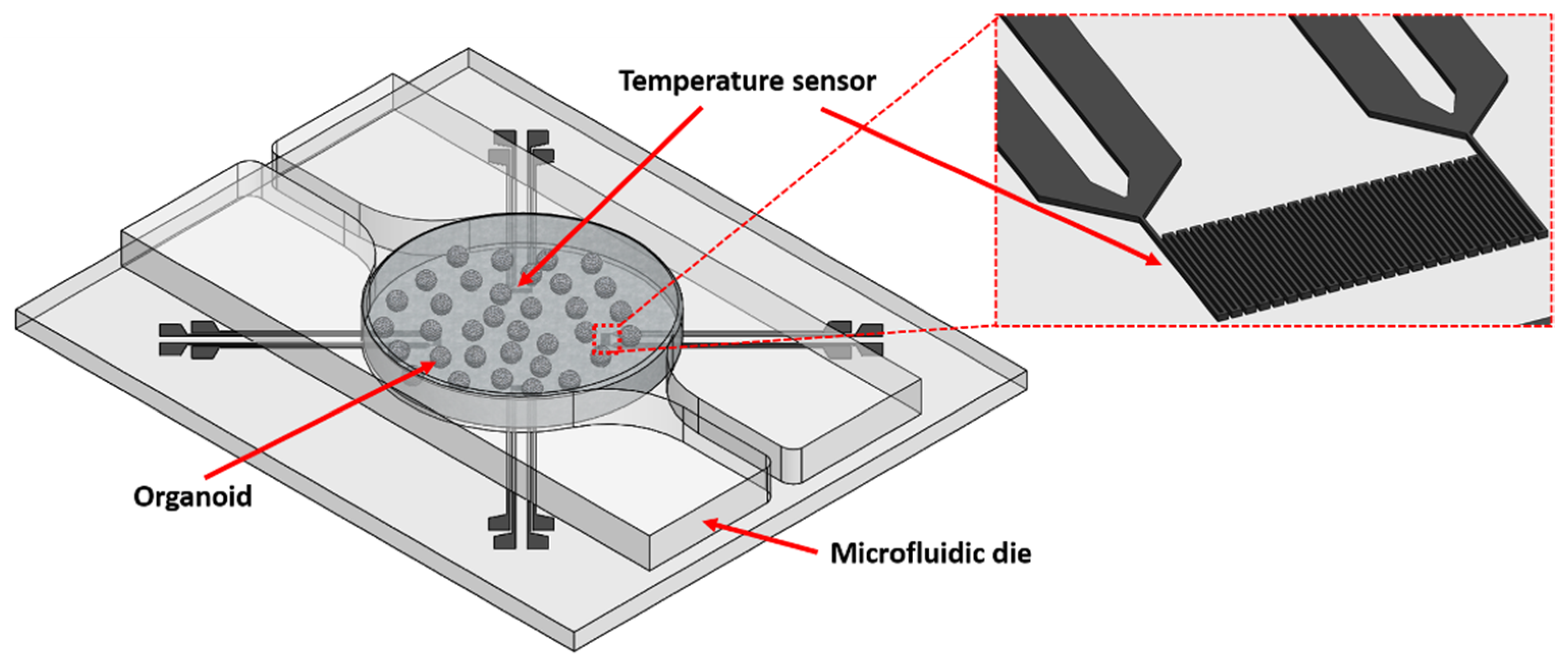
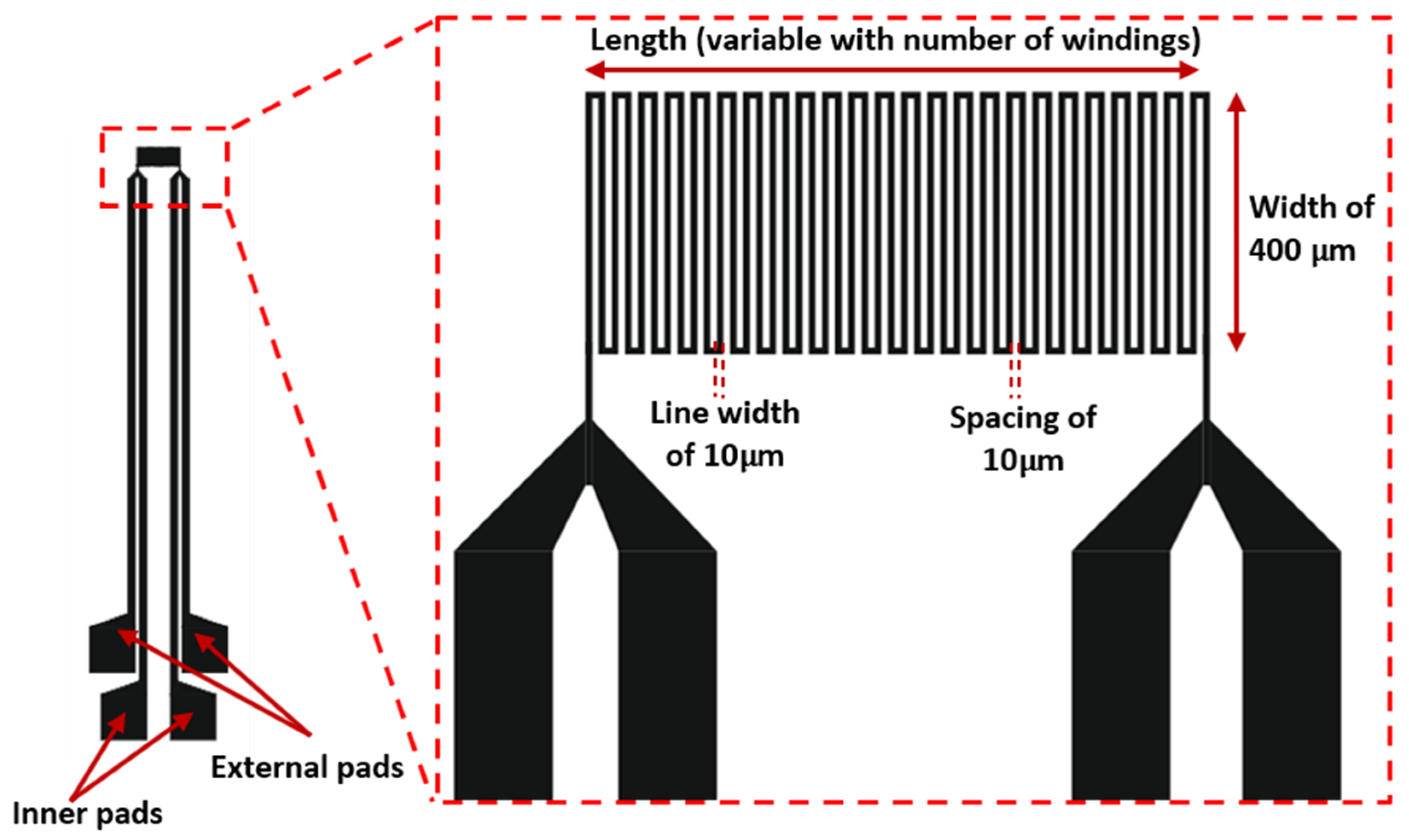
2.1. Design and Sensing Principle of the Temperature Microsensor
2.2. Numerical Simulations
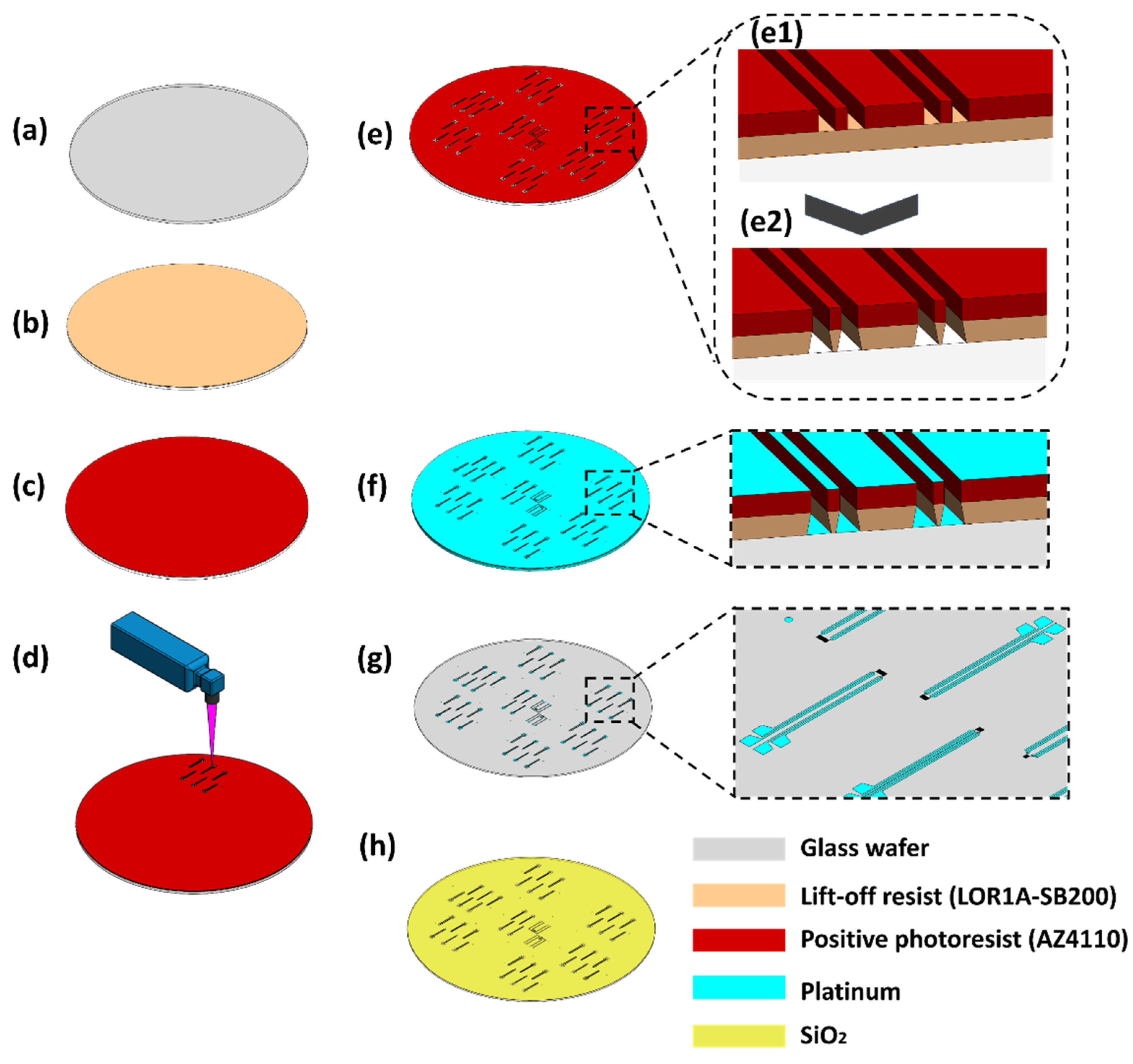
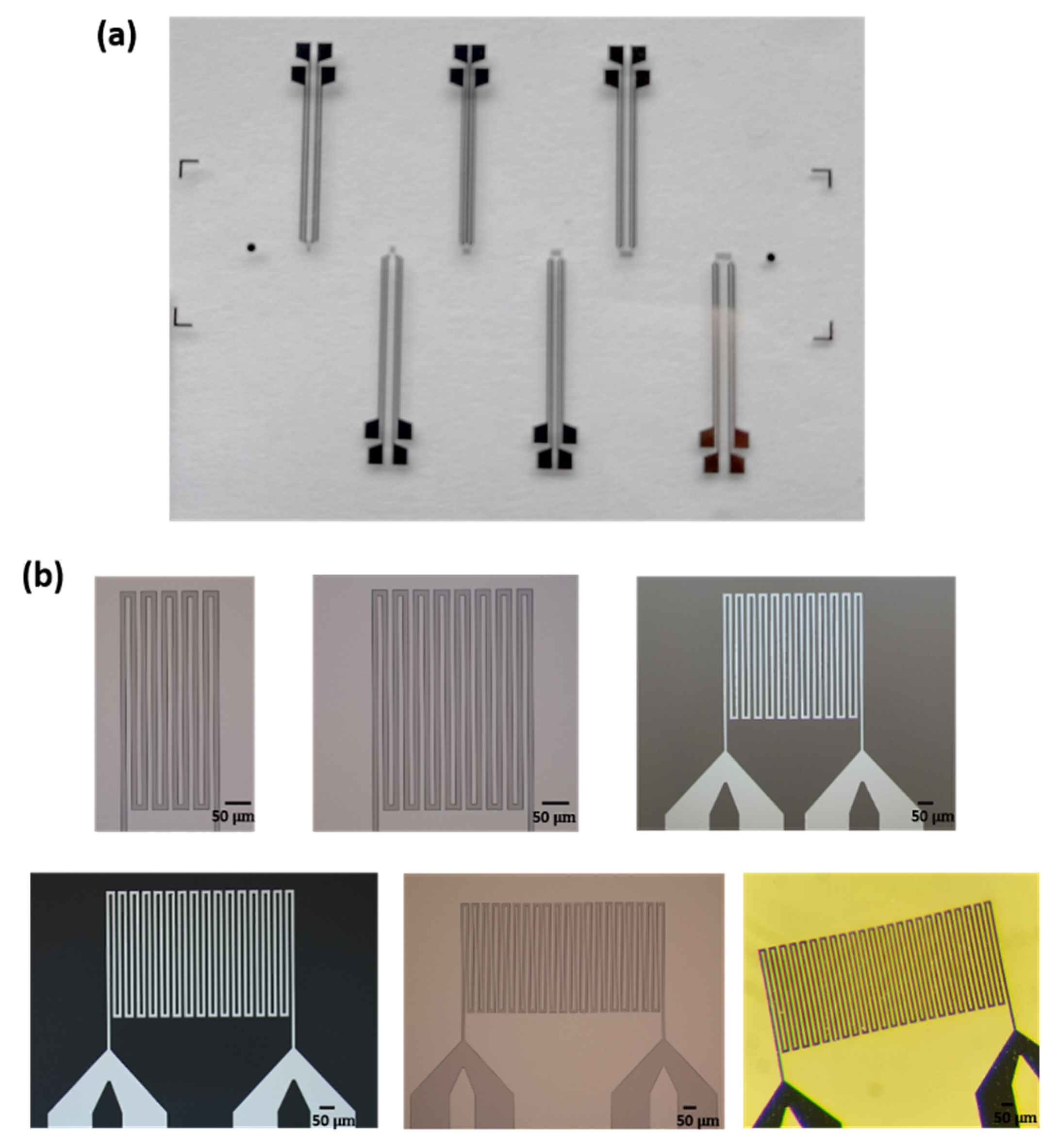
2.3. Fabrication Process
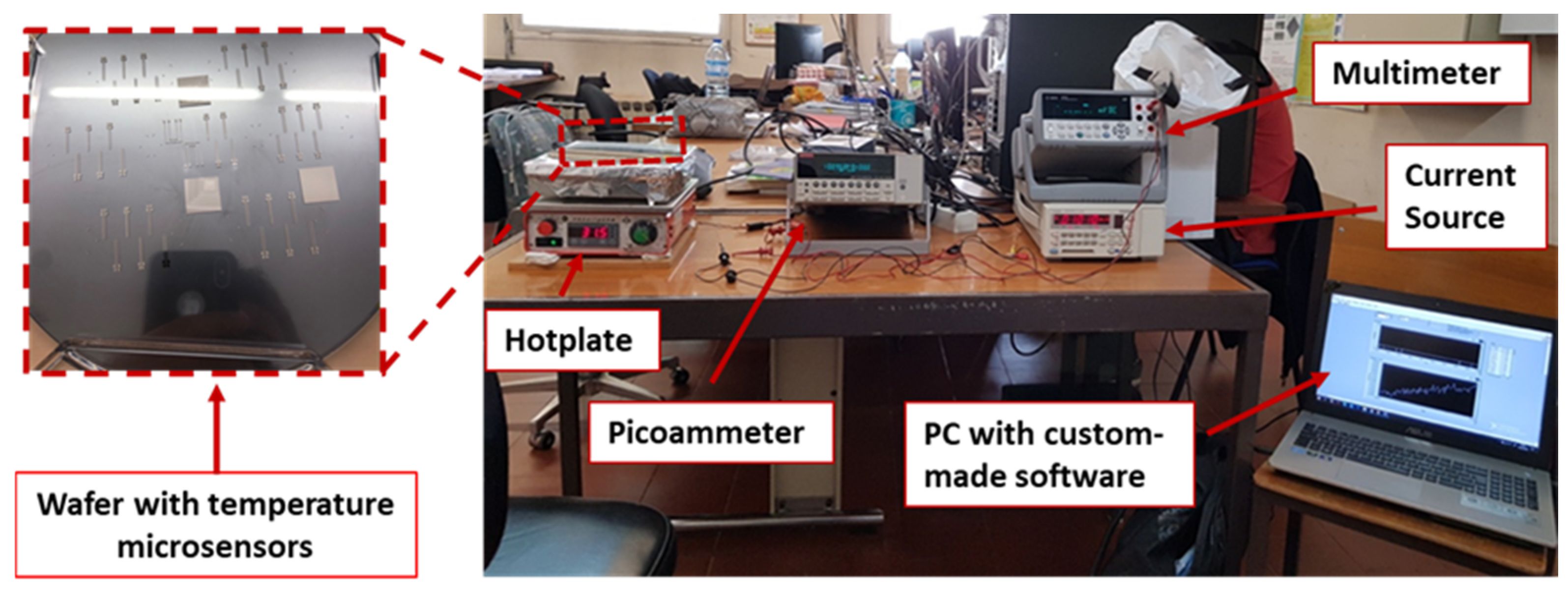
2.4. Eletrical Characterization Setup
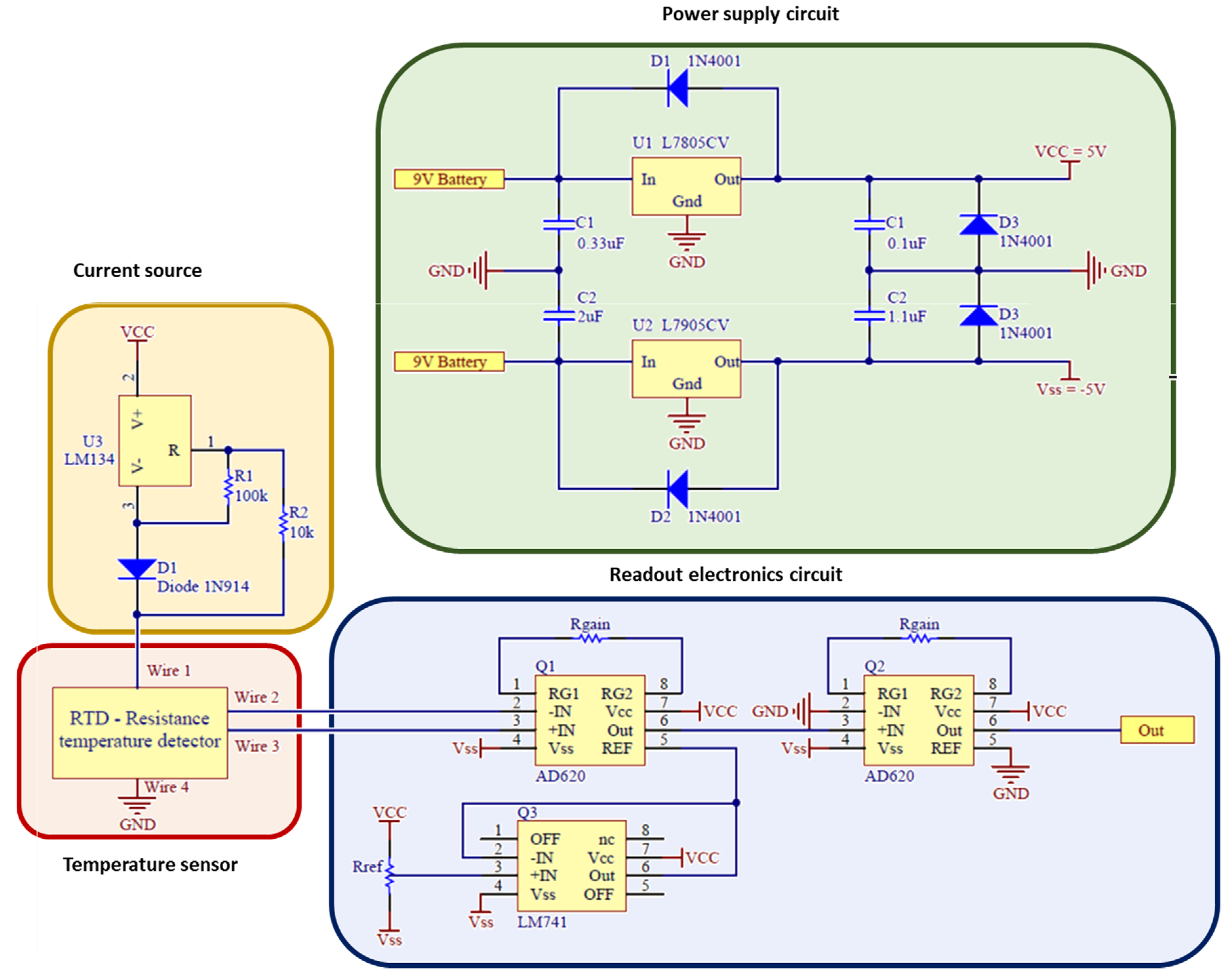
2.5. Microsensors Readout Electronics
3. Results and Discussion
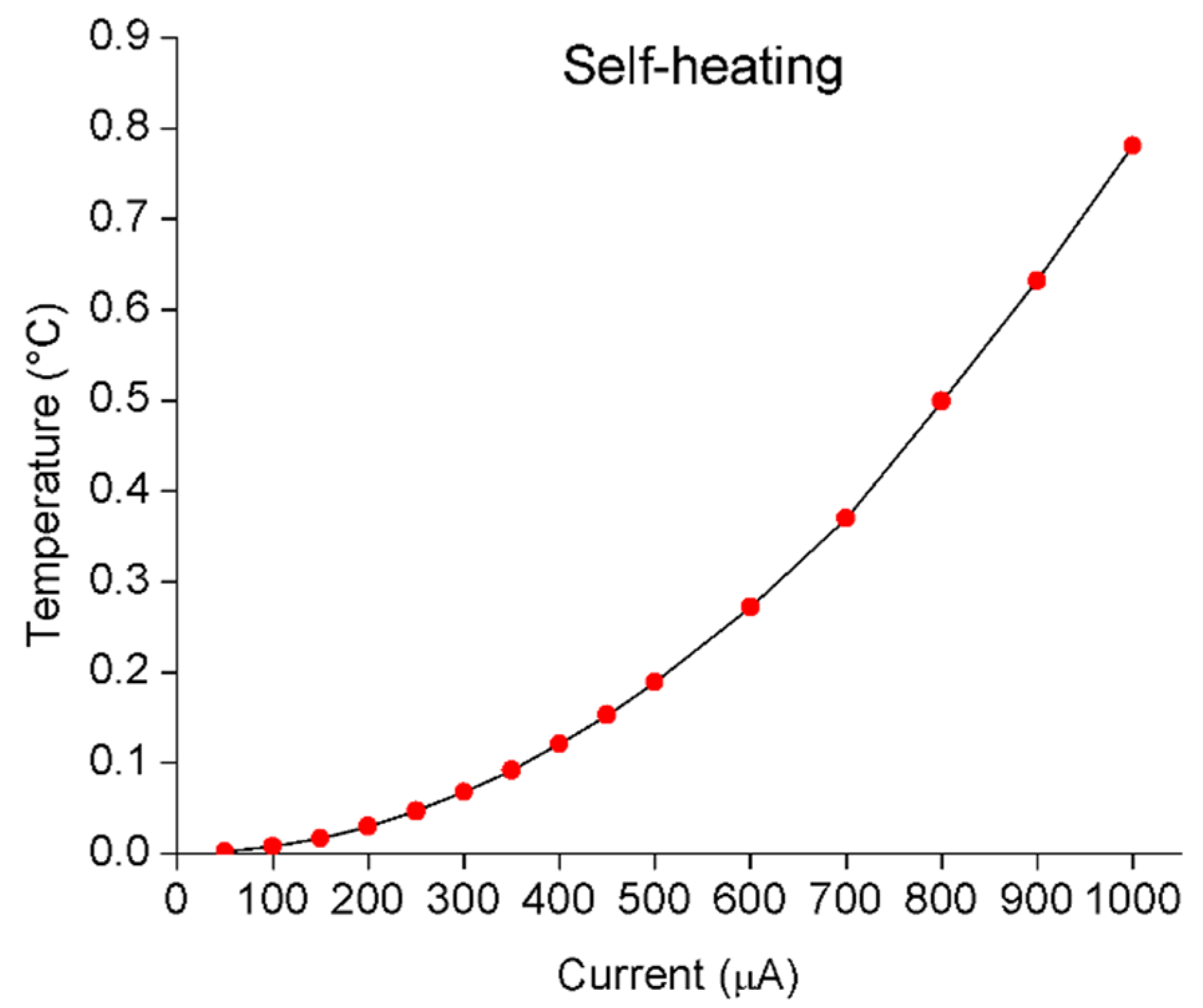
3.1. Excitation Current
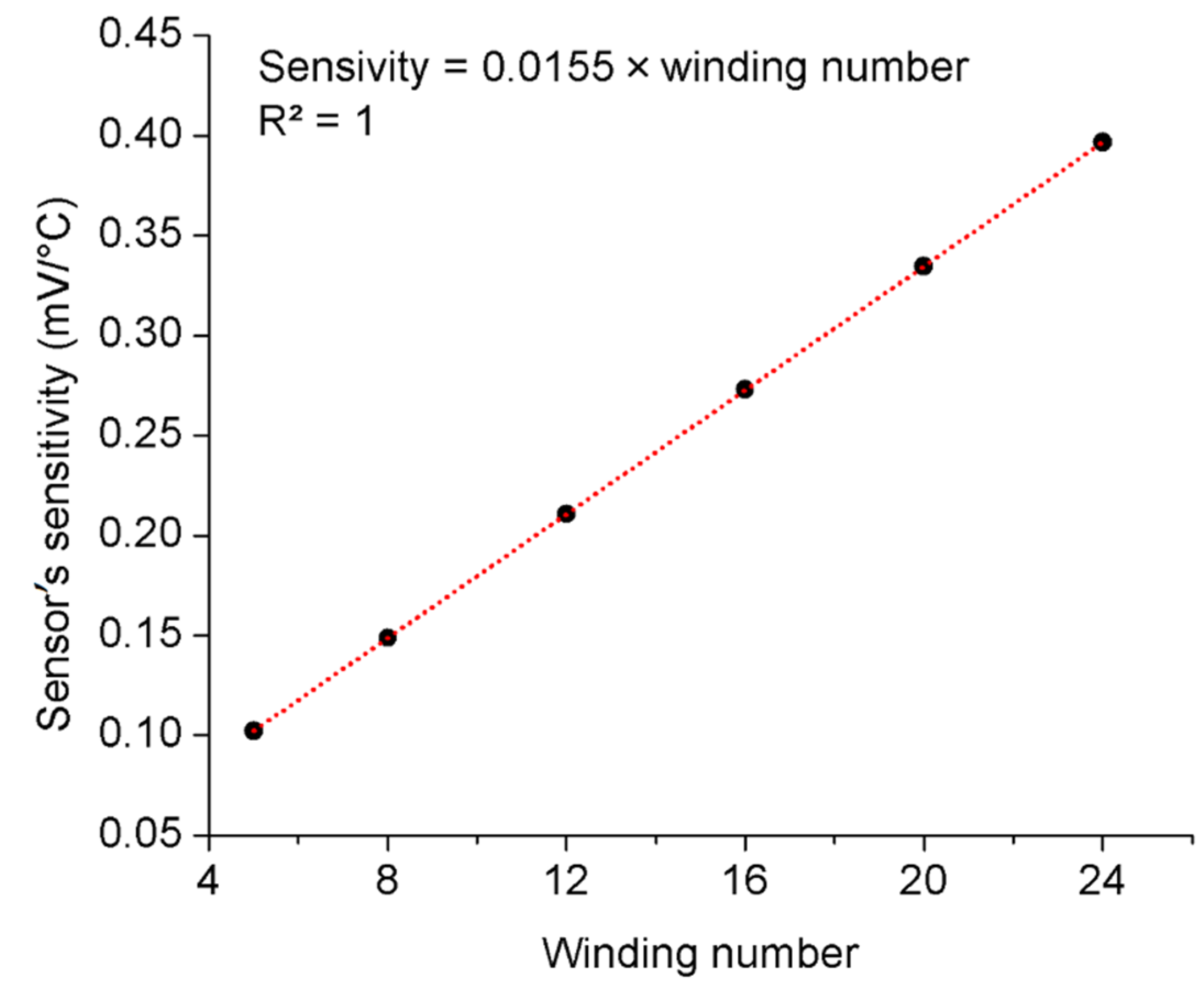
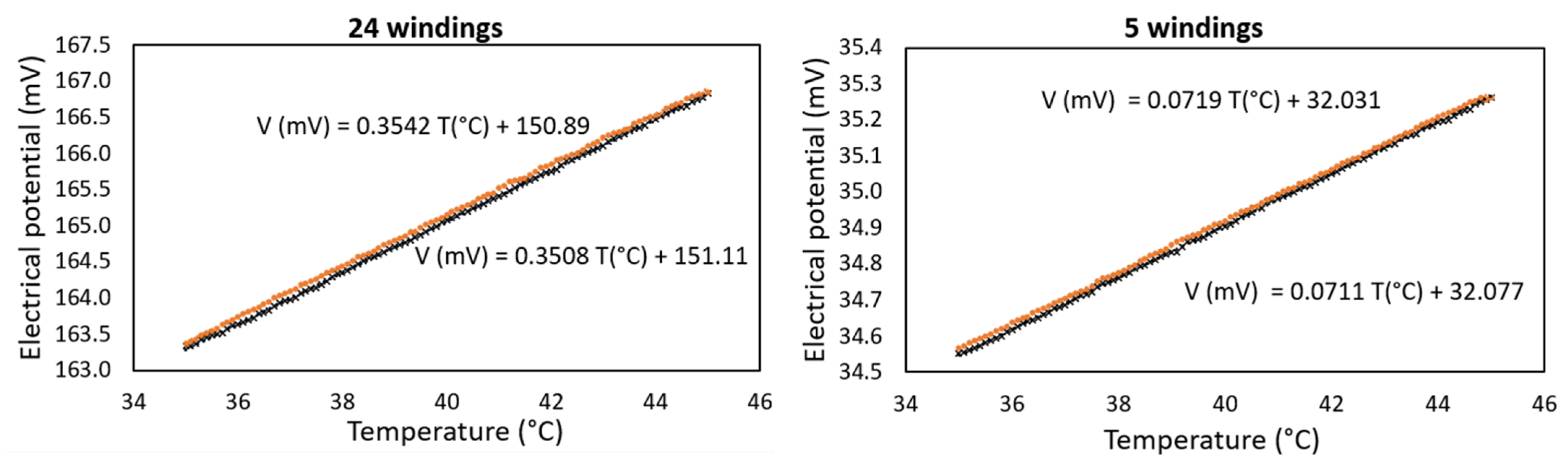
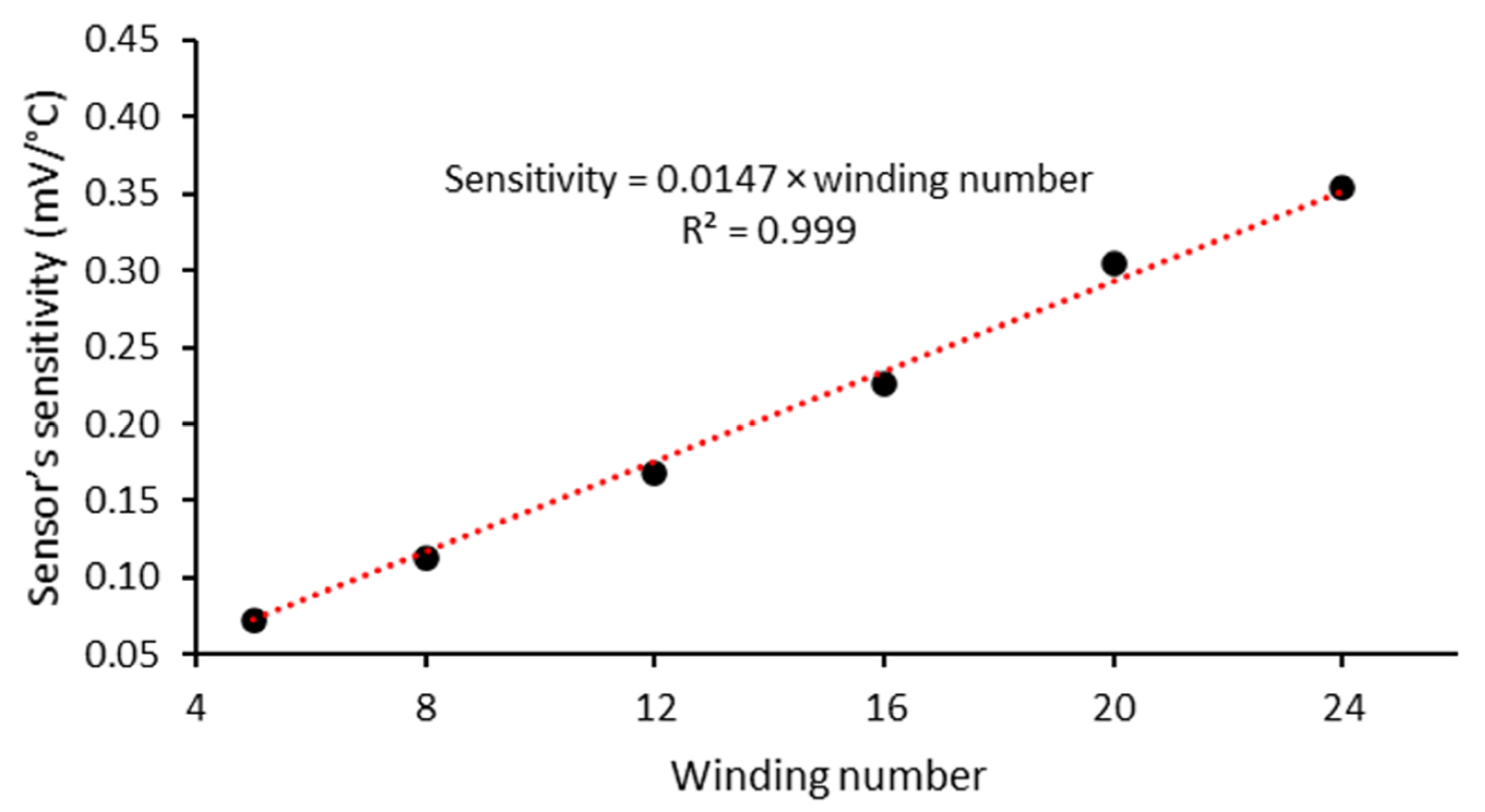
3.2. Calibration of Temperature Microsensors
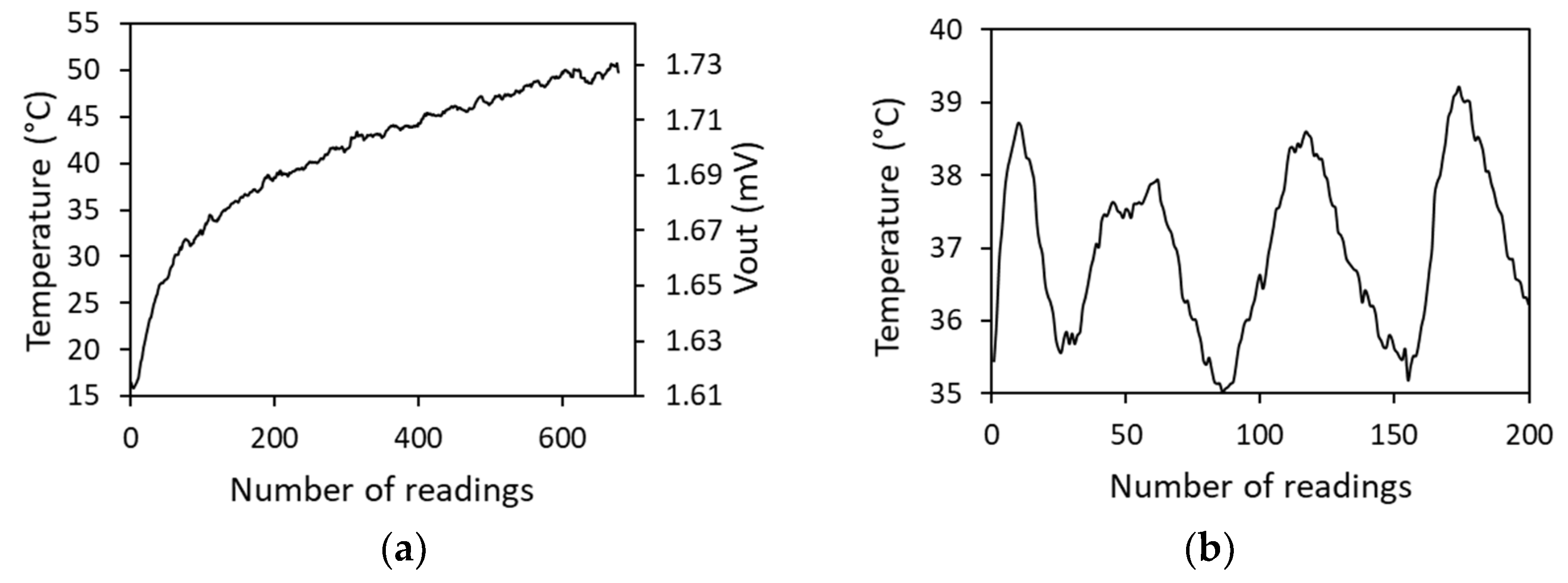
3.3. RTDs Readout System Measurements
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- van den Berg, A.; Mummery, C.L.; Passier, R.; Van Der Meer, A.D. Personalised organs-on-chips: Functional testing for precision medicine. Lab Chip 2018, 19, 198–205. [Google Scholar] [CrossRef]
- Haderspeck, J.C.; Chuchuy, J.; Kustermann, S.; Liebau, S.; Loskill, P. Organ-on-a-chip technologies that can transform ophthalmic drug discovery and disease modeling. Expert Opin. Drug Discov. 2019, 14, 47–57. [Google Scholar] [CrossRef]
- Bovard, D.; Iskandar, A.; Luettich, K.; Hoeng, J.; Peitsch, M.C. Organs-on-a-chip: A new paradigm for toxicological assessment and preclinical drug development. Toxicol. Res. Appl. 2017, 1, 2397847317726351. [Google Scholar] [CrossRef]
- Rodrigues, R.O.; Sousa, P.C.; Gaspar, J.; Bañobre-López, M.; Lima, R.; Minas, G.J.S. Organ-on-a-Chip: A Preclinical Microfluidic Platform for the Progress of Nanomedicine. Small 2020, 16, 2003517. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Luo, Z.; Lee, J.; Kim, H.J.; Lee, K.; Tebon, P.; Feng, Y.; Dokmeci, M.R.; Sengupta, S.; Khademhosseini, A.J.A.h.m. Organ-on-a-Chip for Cancer and Immune Organs Modeling. Adv. Healthcare Mater. 2019, 8, 1801363. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, X.; Liang, L.; Li, J.; Demirci, U.; Wang, S. A decade of progress in liver regenerative medicine. Biomaterials 2018, 157, 161–176. [Google Scholar] [CrossRef]
- Devarasetty, M.; Mazzocchi, A.R.; Skardal, A. Applications of Bioengineered 3D Tissue and Tumor Organoids in Drug Development and Precision Medicine: Current and Future. BioDrugs 2018, 32, 53–68. [Google Scholar] [CrossRef] [PubMed]
- Ronaldson-Bouchard, K.; Vunjak-Novakovic, G. Organs-on-a-chip: A fast track for engineered human tissues in drug development. Cell Stem Cell 2018, 22, 310–324. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.S.; Aleman, J.; Shin, S.R.; Kilic, T.; Kim, D.; Shaegh, S.A.M.; Massa, S.; Riahi, R.; Chae, S.; Hu, N.; et al. Multisensor-integrated organs-on-chips platform for automated and continual in situ monitoring of organoid behaviors. Proc. Natl. Acad. Sci. USA 2017, 114, E2293–E2302. [Google Scholar] [CrossRef]
- Kilic, T.; Navaee, F.; Stradolini, F.; Renaud, P.; Carrara, S. Organs-on-chip monitoring: Sensors and other strategies. Microphysiol. Syst. 2018, 1, 1. [Google Scholar] [CrossRef]
- Da Ponte, R.M.; Gaio, N.; Van Zeijl, H.; Vollebregt, S.; Dijkstra, P.; Dekker, R.; Serdijn, W.A.; Giagka, V. Monolithic integration of a smart temperature sensor on a modular silicon-based organ-on-a-chip device. Sens. Actuators A Phys. 2021, 317, 112439. [Google Scholar] [CrossRef]
- McKenzie, B.A.; Grover, W.H. A microfluidic thermometer: Precise temperature measurements in microliter-and nanoliter-scale volumes. PLoS ONE 2017, 12, e0189430. [Google Scholar] [CrossRef]
- Shellman, Y.G.; Ribble, D.; Yi, M.; Pacheco, T.; Hensley, M.; Finch, D.; Kreith, F.; Mahajan, R.L.; Norris, D.A. Fast response temperature measurement and highly reproducible heating methods for 96-well plates. Biotechniques 2004, 36, 968–976. [Google Scholar] [CrossRef]
- Reichen, M.; Veraitch, F.S.; Szita, N. Development of a Multiplexed Microfluidic Platform for the Automated Cultivation of Embryonic Stem Cells. J. Lab. Autom. 2013, 18, 519–529. [Google Scholar] [CrossRef][Green Version]
- Li, C.; Sun, J.; Wang, Q.; Zhang, W.; Gu, N. Wireless Thermometry for Real-Time Temperature Recording on Thousand-Cell Level. IEEE Trans. Biomed. Eng. 2019, 66, 23–29. [Google Scholar] [CrossRef]
- Qiao, J.; Mu, X.; Qi, L. Construction of fluorescent polymeric nano-thermometers for intracellular temperature imaging: A review. Biosens. Bioelectron. 2016, 85, 403–413. [Google Scholar] [CrossRef]
- Larina, I.V.; Larin, K.V.; Esenaliev, R.O. Real-time optoacoustic monitoring of temperature in tissues. J. Phys. D Appl. Phys. 2005, 38, 2633–2639. [Google Scholar] [CrossRef]
- Lee, S.; Kang, S.H. Integrated optical molecular imaging system for four-dimensional real-time detection in living single cells. Biosens. Bioelectron. 2012, 31, 393–398. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Kim, J.; Shin, Y.; Yoon, Y. A study on the fabrication of an RTD (resistance temperature detector) by using Pt thin film. Korean J. Chem. Eng. 2001, 18, 61–66. [Google Scholar] [CrossRef]
- Rodrigues, R.O.; Baldi, G.; Doumett, S.; Garcia-Hervia, L.; Gallo, J.; Bañobre-López, M.; Dražić, G.; Calhelha, R.C.; Ferreira, I.C.; Lima, R.; et al. Multifunctional graphene-based magnetic nanocarriers for combined hyperthermia and dual stimuli-responsive drug delivery. Mater. Sci. Eng. C 2018, 93, 206–217. [Google Scholar] [CrossRef] [PubMed]
- Button, V. Principles of Measurement and Transduction of Biomedical Variables; Academic Press: New York, NY, USA, 2015. [Google Scholar]
- Geninatti, T.; Bruno, G.; Barile, B.; Hood, R.L.; Farina, M.; Schmulen, J.; Canavese, G.; Grattoni, A. Impedance characterization, degradation, and in vitro biocompatibility for platinum electrodes on BioMEMS. Biomed. Microdevices 2015, 17, 1–11. [Google Scholar] [CrossRef]
- Lee, C.; Shen, C.; Cheng, Y.; Chang, Y. Flexible Pressure, Temperature, and Flow Microsensors for Integration in Methanol Microreformer. Sens. Mater. 2013, 25, 411–416. [Google Scholar]
- Lee, C.-Y.; Lee, S.-J.; Hung, Y.-M.; Hsieh, C.-T.; Chang, Y.-M.; Huang, Y.-T.; Lin, J.-T.; Physical, A.A. Integrated microsensor for real-time microscopic monitoring of local temperature, voltage and current inside lithium ion battery. Sens. Actuator A Phys. 2017, 253, 59–68. [Google Scholar] [CrossRef]
- Sen, S.; Pan, T.; Ghosal, P. An improved lead wire compensation technique for conventional four wire resistance temperature detectors (RTDs). Measurement 2011, 44, 842–846. [Google Scholar] [CrossRef]
- Raijmakers, L.; Danilov, D.; Eichel, R.-A.; Notten, P. A review on various temperature-indication methods for Li-ion batteries. Appl. Energy 2019, 240, 918–945. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Windings in the Meander-Shaped Geometry | Width (µm) | Length (µm) | Area (µm2) |
|---|---|---|---|
| 5 | 400 | 190 | 76,000 |
| 8 | 400 | 310 | 124,000 |
| 12 | 400 | 470 | 470,000 |
| 16 | 400 | 630 | 252,000 |
| 20 | 400 | 790 | 316,000 |
| 24 | 400 | 950 | 380,000 |
| Number of Windings in the Meander-Shaped Geometry | Simulated Sensor’s Sensitivity (mV/°C) | Experimental Sensor’s Sensitivity (mV/°C) |
|---|---|---|
| 5 | 0.1022 | 0.0719 |
| 8 | 0.1486 | 0.1126 |
| 12 | 0.2108 | 0.1683 |
| 16 | 0.2730 | 0.2258 |
| 20 | 0.3345 | 0.3052 |
| 24 | 0.3966 | 0.3542 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sousa, P.J.; Pinto, V.C.; Magalhães, V.H.; Rodrigues, R.O.; Sousa, P.C.; Minas, G. Development of Highly Sensitive Temperature Microsensors for Localized Measurements. Appl. Sci. 2021, 11, 3864. https://doi.org/10.3390/app11093864
Sousa PJ, Pinto VC, Magalhães VH, Rodrigues RO, Sousa PC, Minas G. Development of Highly Sensitive Temperature Microsensors for Localized Measurements. Applied Sciences. 2021; 11(9):3864. https://doi.org/10.3390/app11093864
Chicago/Turabian StyleSousa, Paulo J., Vânia C. Pinto, Vitor H. Magalhães, Raquel O. Rodrigues, Patrícia C. Sousa, and Graça Minas. 2021. "Development of Highly Sensitive Temperature Microsensors for Localized Measurements" Applied Sciences 11, no. 9: 3864. https://doi.org/10.3390/app11093864
APA StyleSousa, P. J., Pinto, V. C., Magalhães, V. H., Rodrigues, R. O., Sousa, P. C., & Minas, G. (2021). Development of Highly Sensitive Temperature Microsensors for Localized Measurements. Applied Sciences, 11(9), 3864. https://doi.org/10.3390/app11093864