1. Introduction
For several decades, conductance transducers have been developed and applied by LNEC to maritime reduced-scale models, in order to obtain the measurement of a wave level and its variation under a dynamic regime, namely using infrastructures able to generate waves in hydraulic experimental facilities. Coastal engineering is a branch of civil engineering with a large impact in economic development, contributing for many types of studies, namely wave mechanics, shoreline erosion, and methods to protect the shore from extreme events (e.g., climatic, geological), and harbor design, among others.
Studies often combine field observation with laboratory modeling observation and mathematical and computational calculus [
1]. Laboratory studies are usually related with physical models, aiming to reproduce, at a certain scale, a physical system often providing information to the development of numerical models for hydrodynamic phenomena, leading to a modern perspective of “Hybrid Modeling” that combines the contributions of physical models through boundary conditions with complex interaction models of fluid flow regimes. This approach was recently named “Composite Modeling”, being a methodology that balances the use of physical and numerical models [
2]. The use of physical modeling is applied in many different domains of hydraulic engineering [
3], making use of many types of models and planning approaches, in order to obtain advantages that physical models still provide [
3].
Coastal and nearshore hydrodynamics are included in this context where measurement in physical models are used to analyze the travel of waves from deep waters to shallower regions, and the related effects of energy transfer and turbulence, creating complex non-linear interactions [
4]. For these types of studies, laboratory experiments play a relevant role in research and development [
5].
The experimental approach with physical models has been used with relevant results to provide information for decision-making processes regarding problems of coastal erosion by studying the impact of coastal structures (e.g., breakwaters, seawalls, dikes, and revetments) intended to reduce wave energy, sediment transport, and other effects of hydrodynamic nature [
6]. The same applies to the development of harbors and maritime structures, regarding the analysis of complex processes of wave propagation and its interaction with coastal structures. In a laboratory, the development of experimental testing using wave generation in order to evaluate its behavior in time and frequency domains requires the use of measurement instruments that re able to obtain accurate observations within a time response suitable for the phenomena requirements.
The metrological characterization and traceability of measurement instruments play a critical role in the laboratory-based research, providing the quality of measurement that is useful in the analysis of hydraulic processes, but also robust raw data for numerical model parameterization and for its validation [
7,
8].
This study proposes several metrological characterization methods applied to conductance transducers, integrated in SI traceability chains, and allows the determination of measurement uncertainty components, which contribute for the wave level instrumental measurement uncertainty. Due to the nature of the conductance transducer measurement principle and method, metrological characteristics, such as electrical stability, linearity, reversibility, repeatability, and thermal influence, should be known and used to evaluate if the applied transducer complies with instrumental requirements defined for the experimental observation scenario, in addition to quality production control procedures. A more robust instrumental comparison with other available measurement transducers can also be performed, contributing for the improvement of the experimental design. This knowledge, which reflects a part of the overall level measurement accuracy, can also be used to identify the main instrumental uncertainty contributions, which can be targeted for upgrading from a design and production point of view. The conductance transducer instrumental uncertainty can also be introduced in hydraulic computational activities, therefore, improving the physical representative of the performed simulations.
Section 2 of this paper provides a brief description of the measurement principle and method related to LNEC’s conductance transducers, which are applied in maritime reduced-scale models. In
Section 3, the proposed metrological characterization methods are described, being the obtained experimental results shown in
Section 4.
Section 5 is dedicated to the evaluation of the instrumental measurement accuracy, including the probabilistic formulation of the identified uncertainty components, and its propagation to the wave level, by the GUM method. At last, the discussion of obtained results is presented in
Section 6.
2. LNEC Conductance Transducer for Maritime Reduced-Scale Models
The measurement principle related to the LNEC conductance transducer is supported in the electrical resistance established between two metallic electrodes vertically immersed in water. This electrical quantity is influenced by the water resistivity,
ρ, the distance between the two electrodes,
D, the electrodes diameters,
d1 and
d2, and the water level,
h, being expressed by
when
d1 and
d2 are equal or lower than 0.25
D.
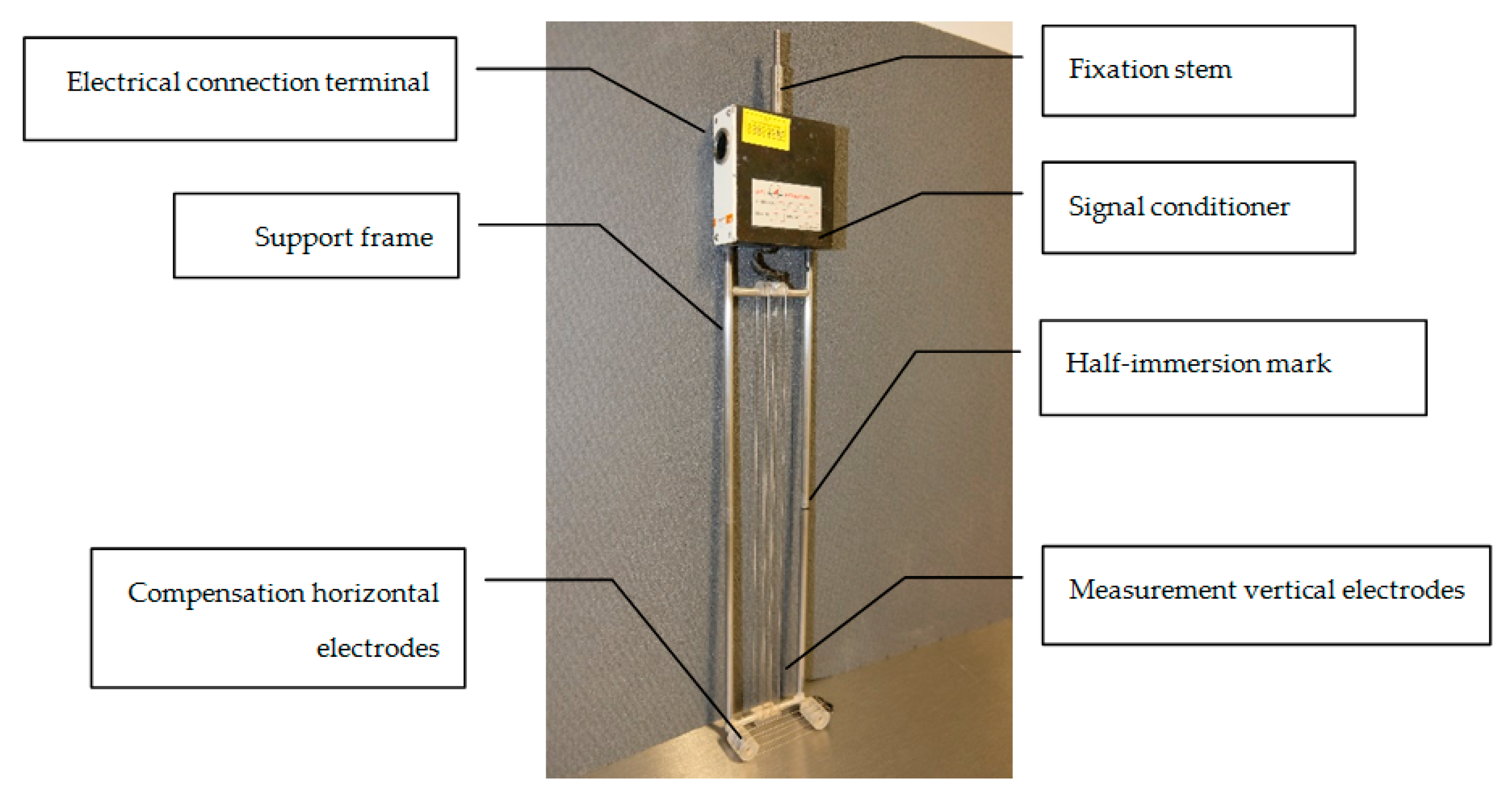
If the water resistivity can be assumed constant or compensated, the inverse resistance between the two vertical electrodes, which corresponds to the conductance quantity, G (expressed in Siemens), is directly proportional to the water level, thus allowing to measure this quantity in maritime hydraulic experimental activities. Conductance transducers are connected to a power supply and a signal conditioner, which provides an output voltage, usually recorded by a data acquisition system.
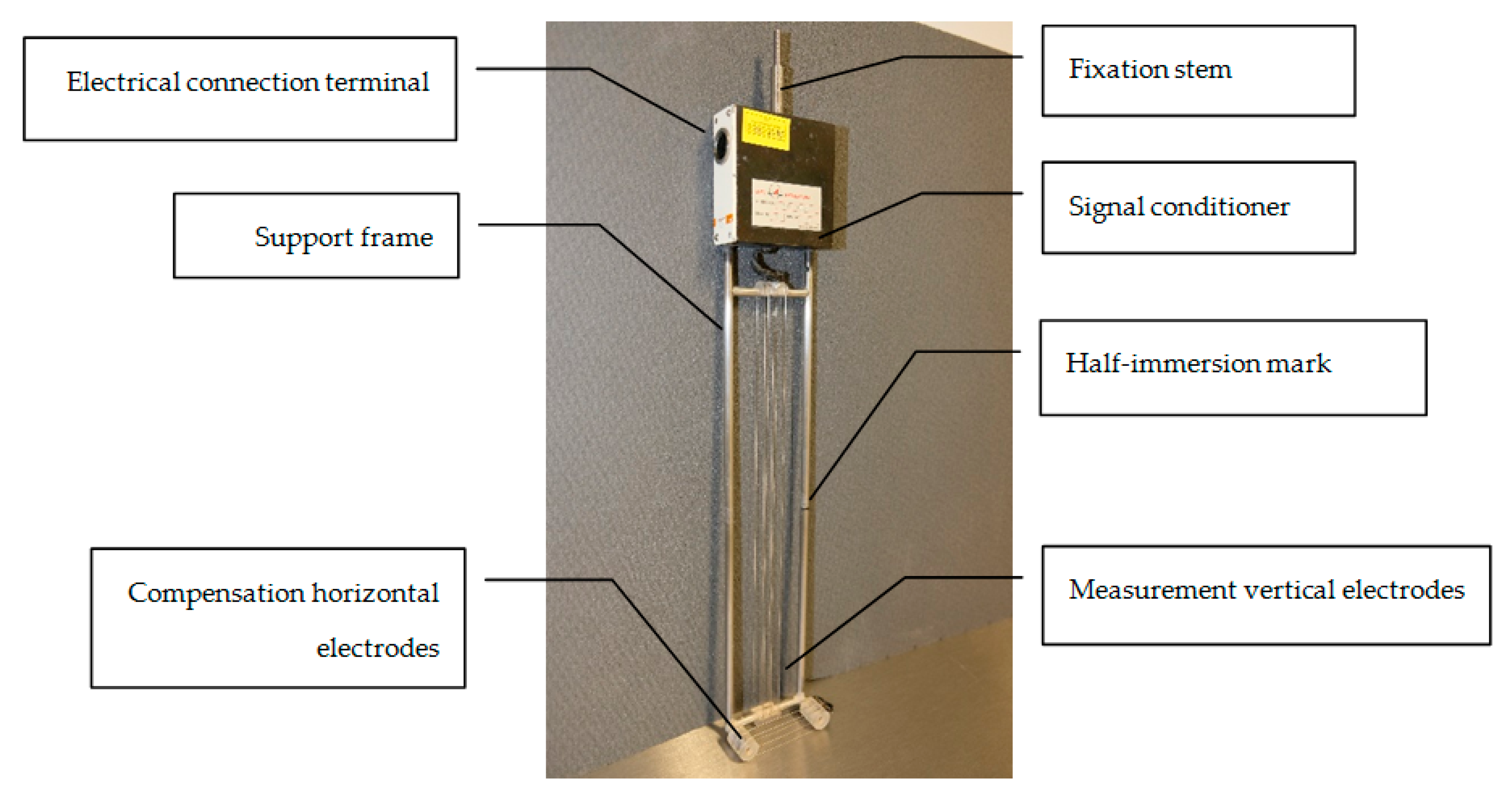
The conductance transducers developed by LNEC (an example is shown in
Figure 1), have an input voltage of 15 V (DC) and their output voltage varies between 0 V and 10 V (DC), available in different sizes and, therefore, covering a wide range of wave level measurement in experimental activities involving maritime reduced-scale models.
In order to reduce the measurement uncertainty related to the variation of the water resistivity during and between experimental sets of measurements, additional compensation horizontal electrodes were considered in the lower region of the sensor (see
Figure 1).
The main concerns regarding to this type of conductance transducer are corrosion, water electrolysis and polarization effects in the metallic electrodes.
3. Metrological Characterization Methods
3.1. Electrical Stability
This section describes the proposed characterization method of the conductance transducer’s electrical stability. The nature of this type of transducer, where a relation between the dimensional quantity (the water level) and the electrical quantity (output voltage) is defined, justifying the characterization of the transducer’s electrical behavior, namely, of its stability. The proposed electrical testing can be performed, in a first stage, for production quality control and maintenance purposes and, in a second stage, as a preliminary test performed in laboratory or in field, characterized by different electrical environments.
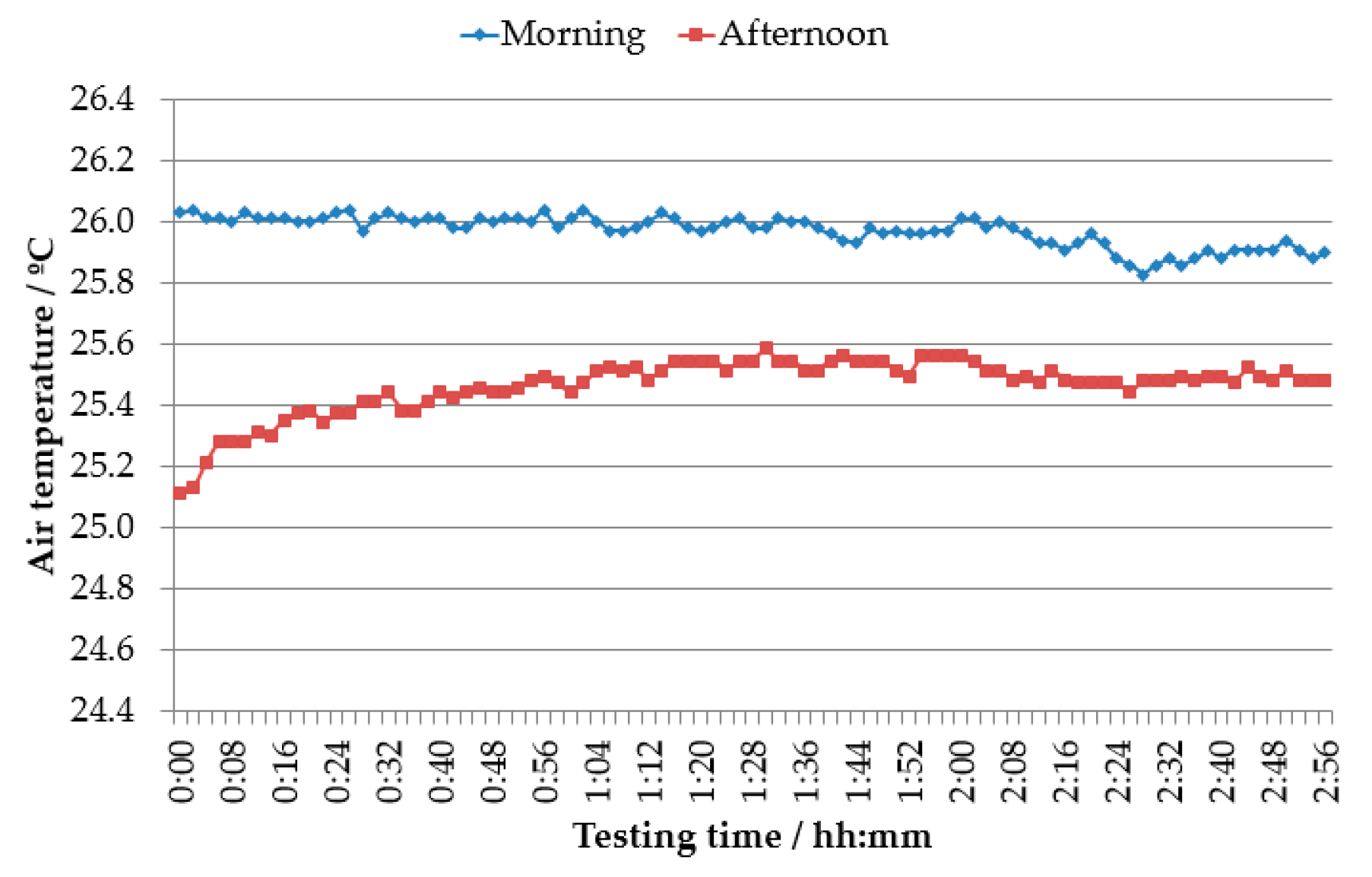
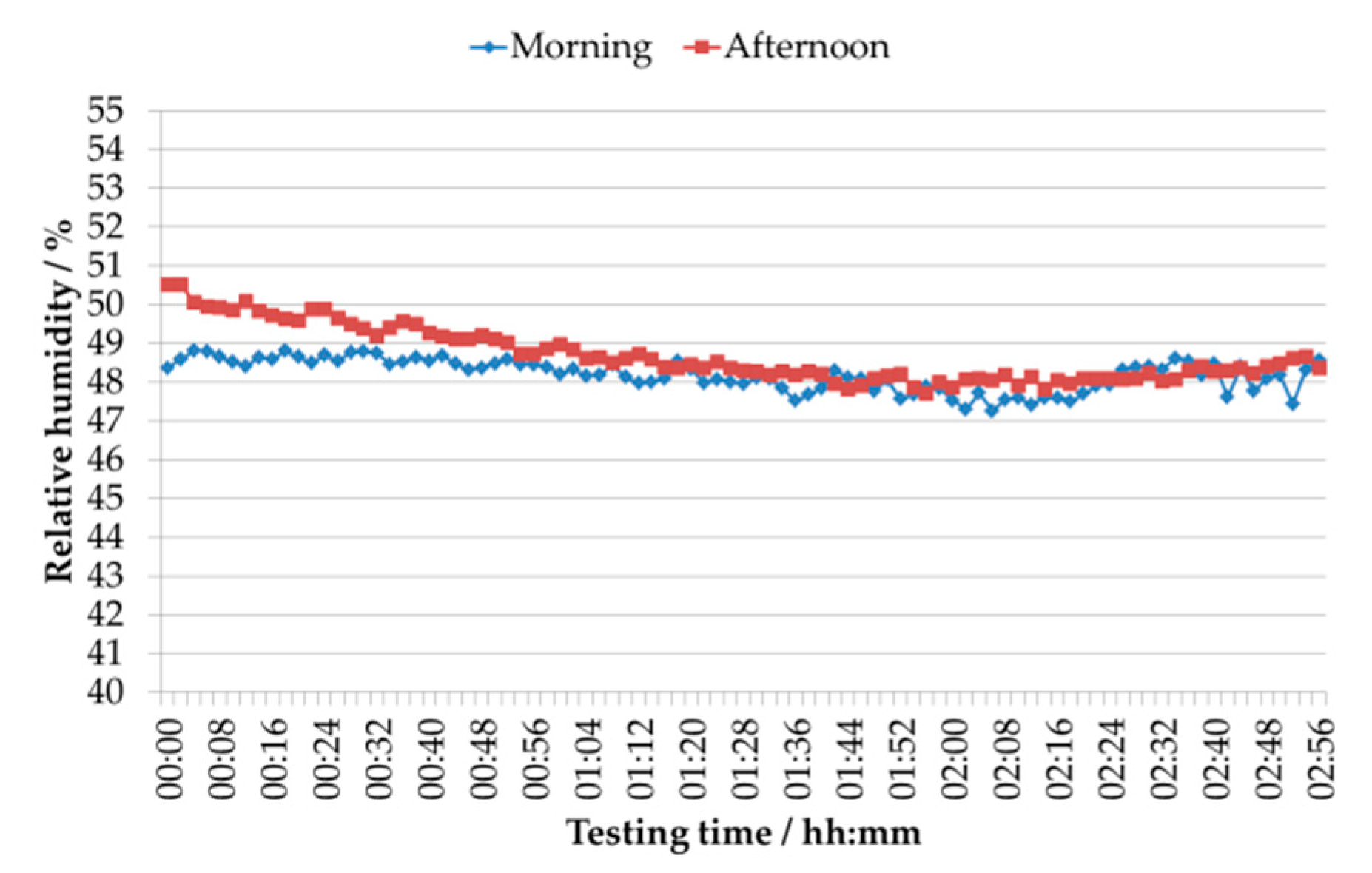
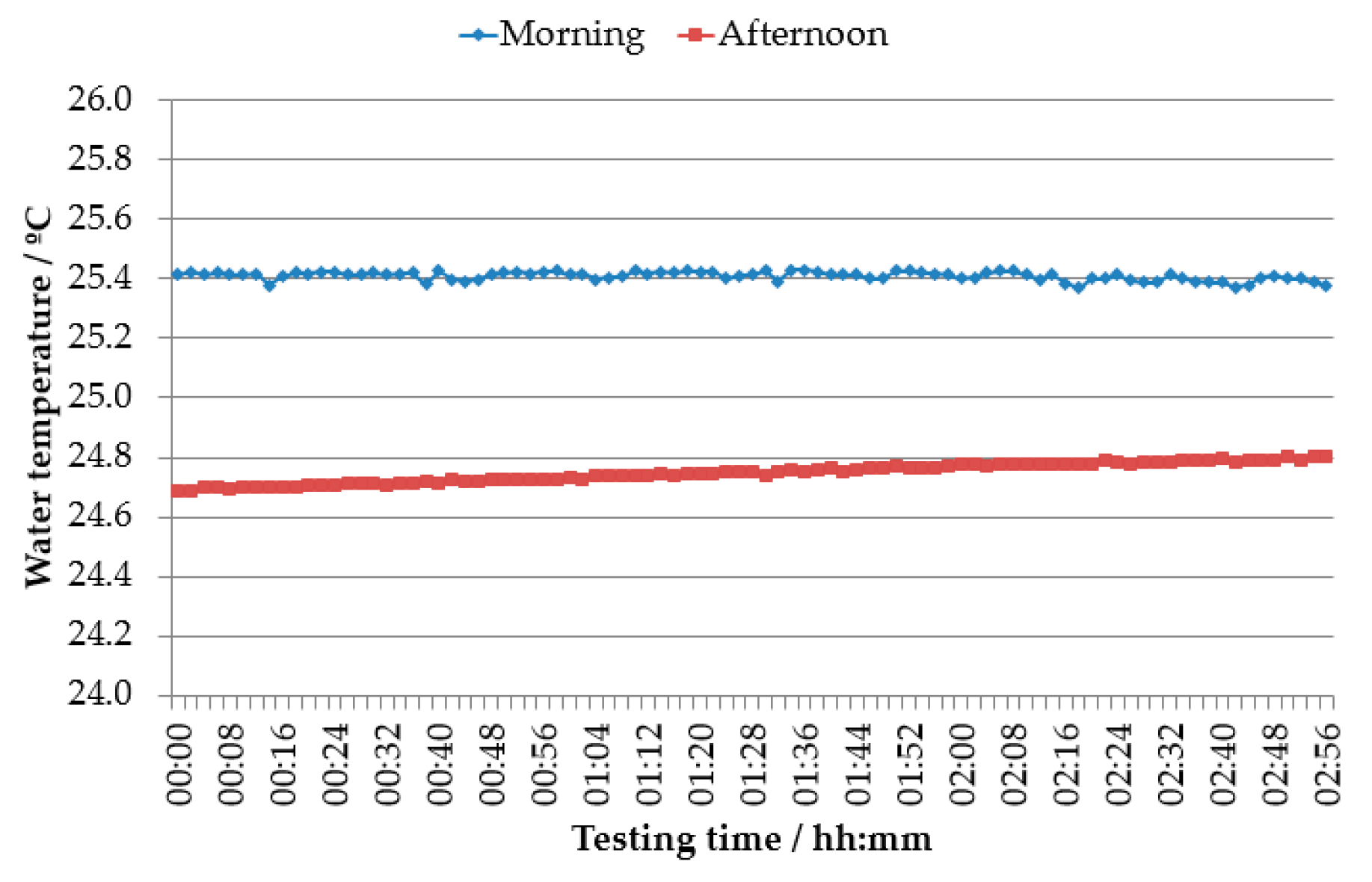
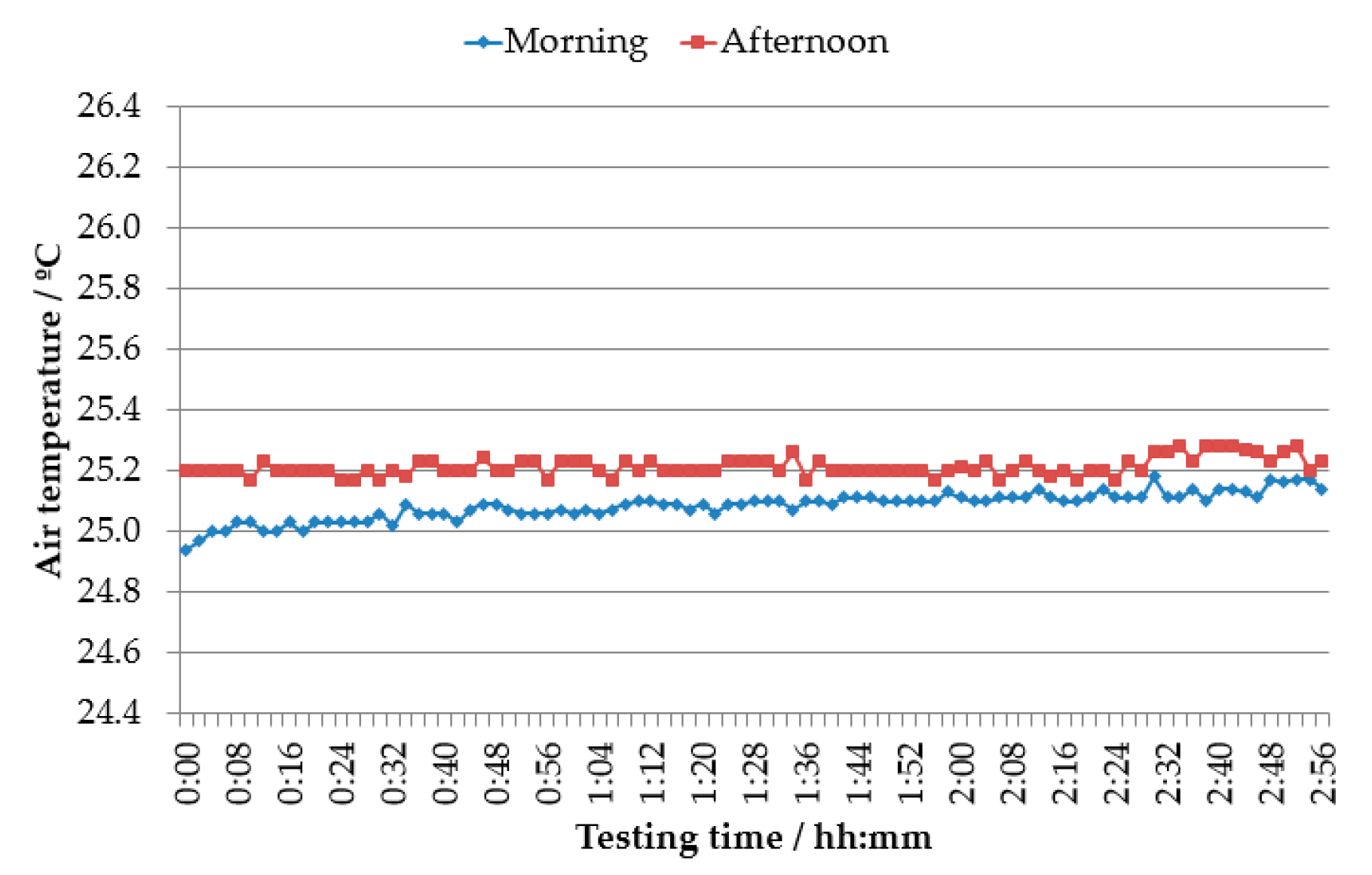
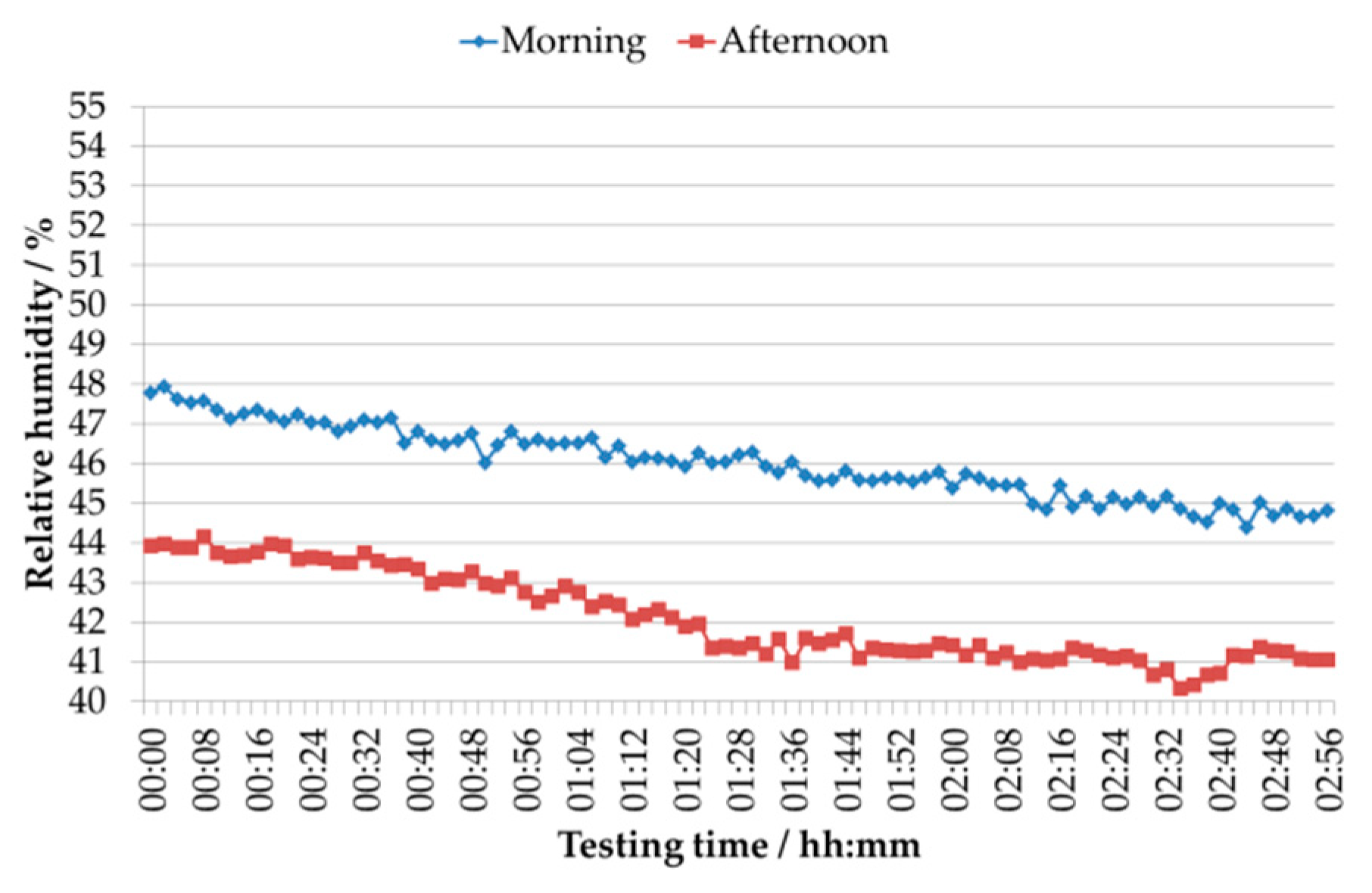
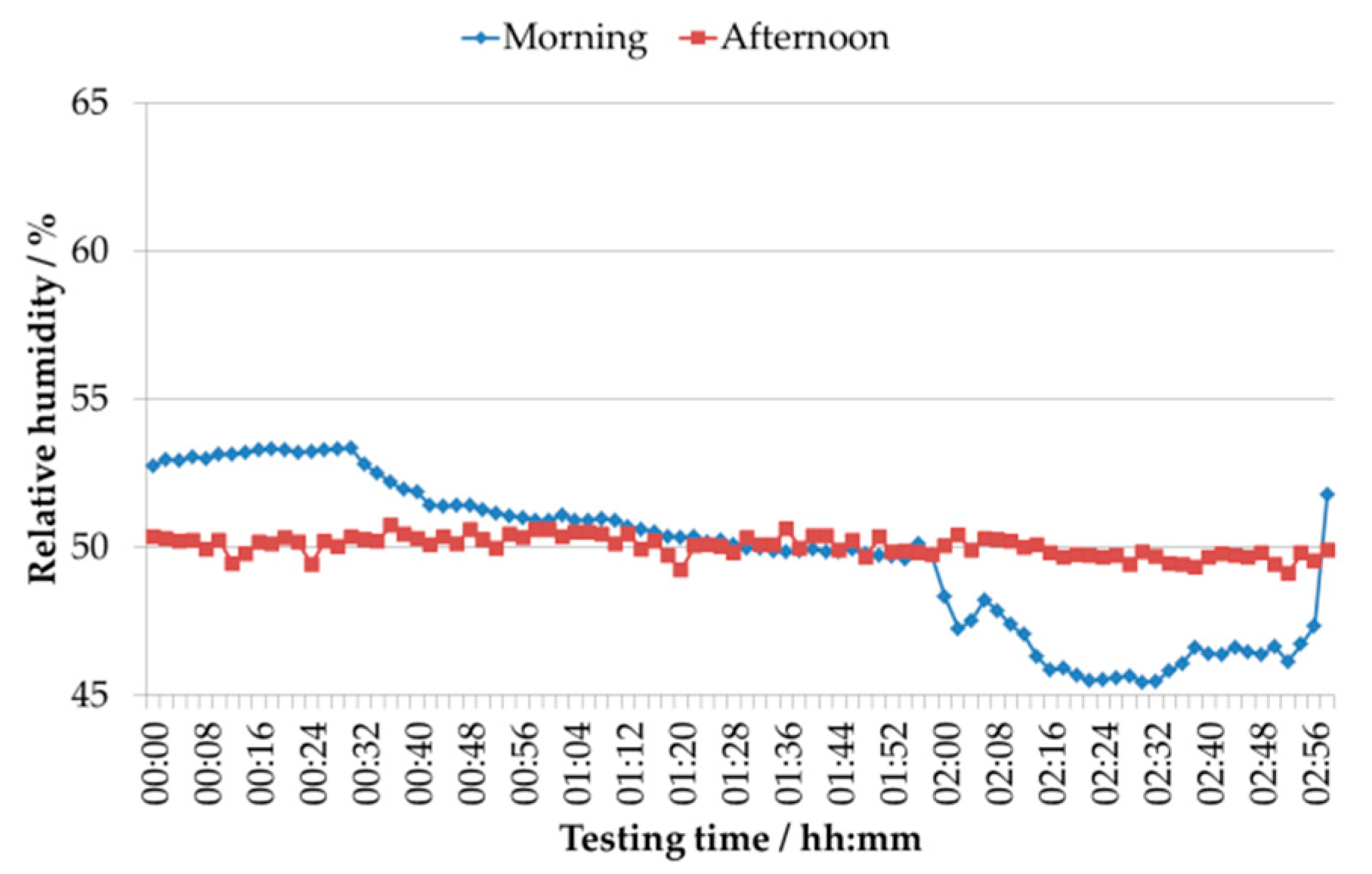
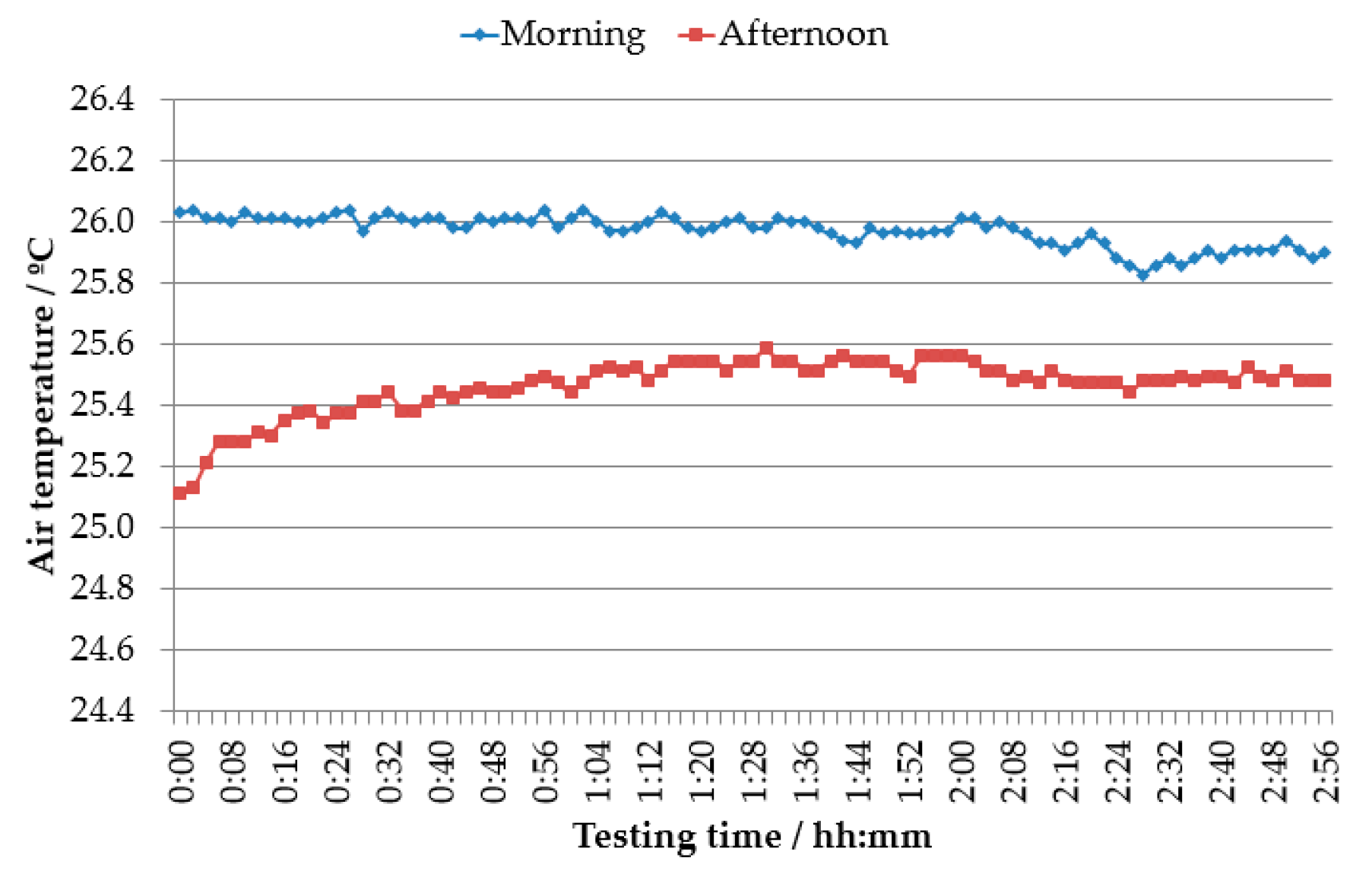
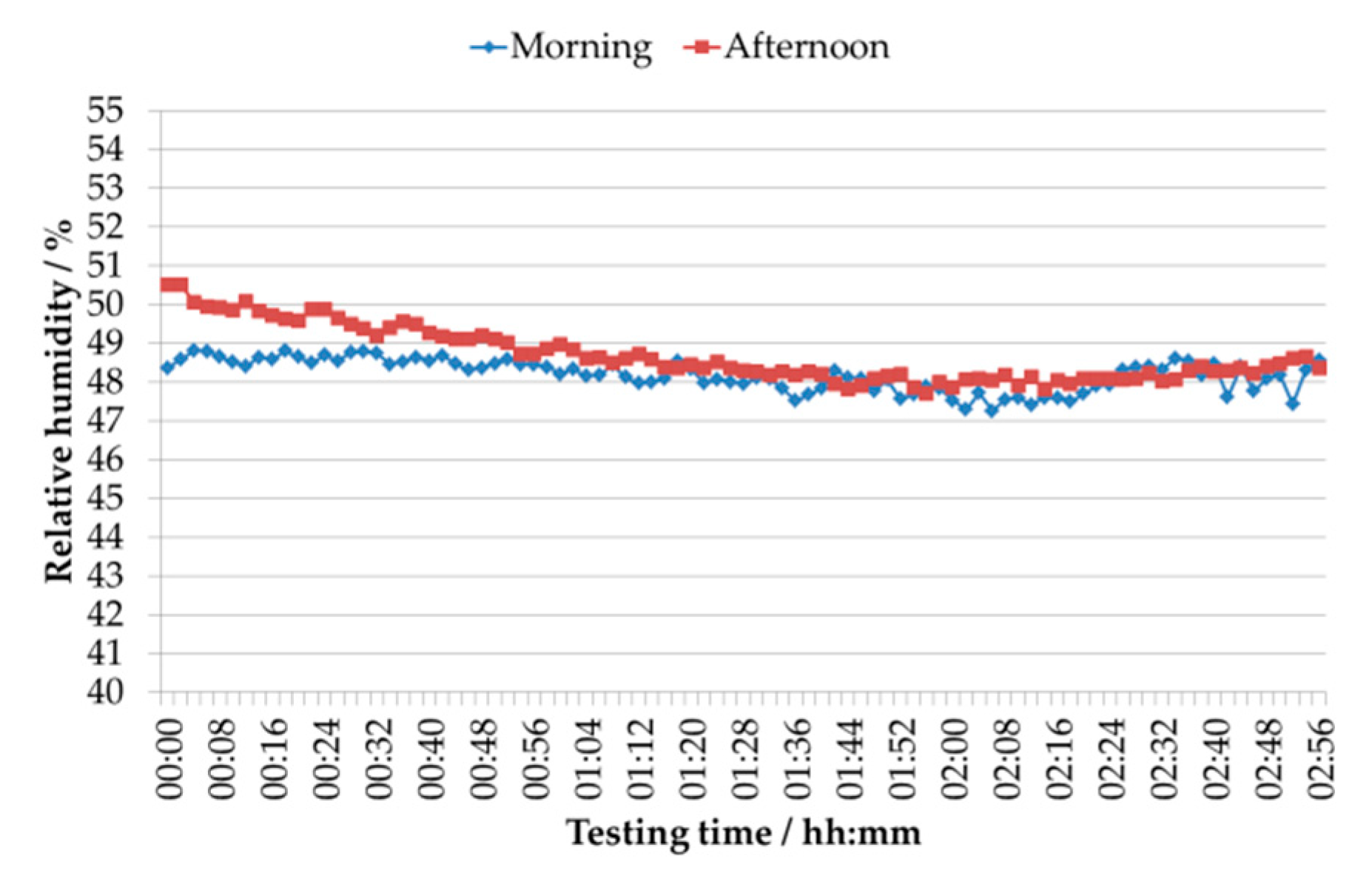
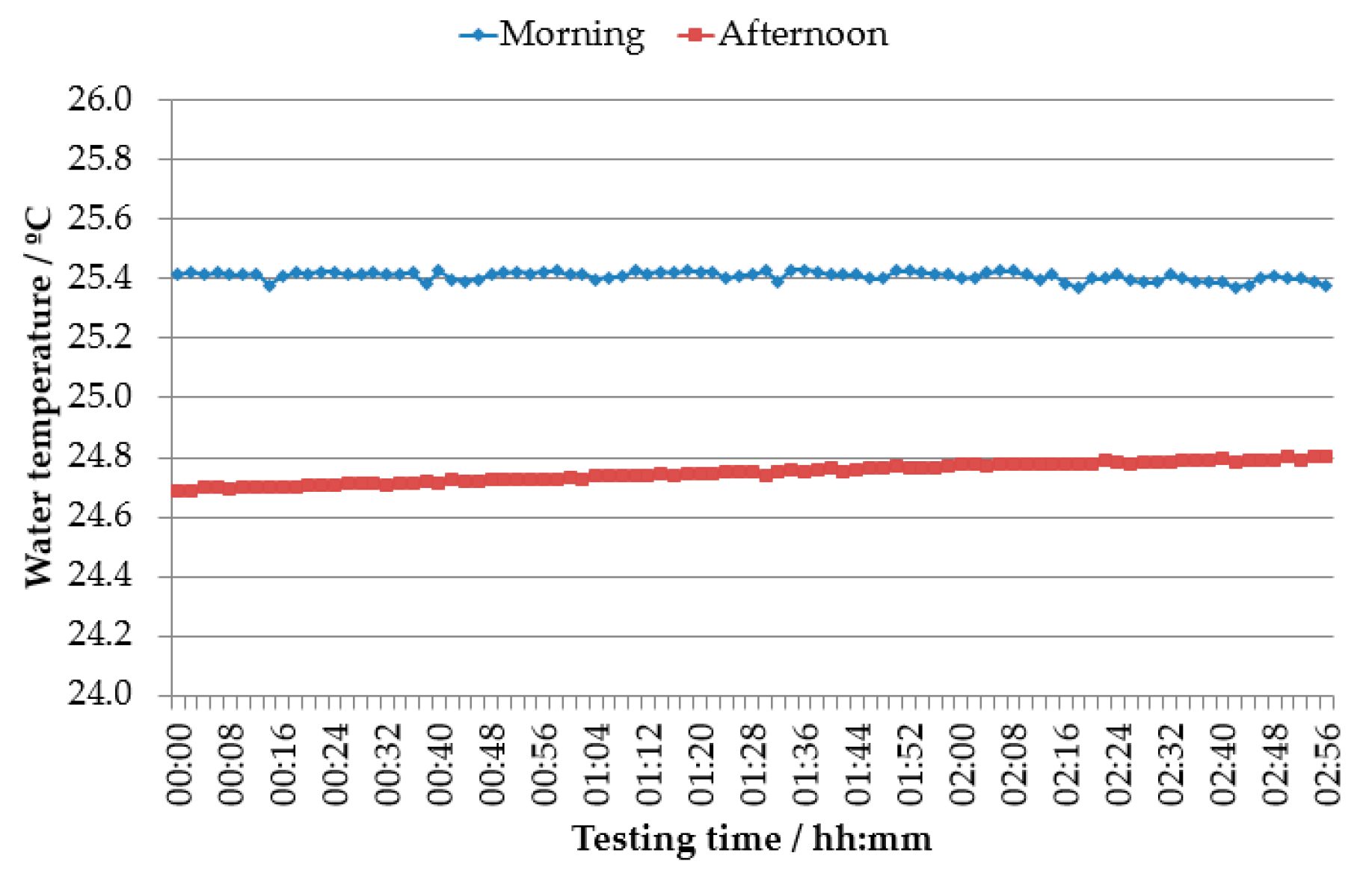
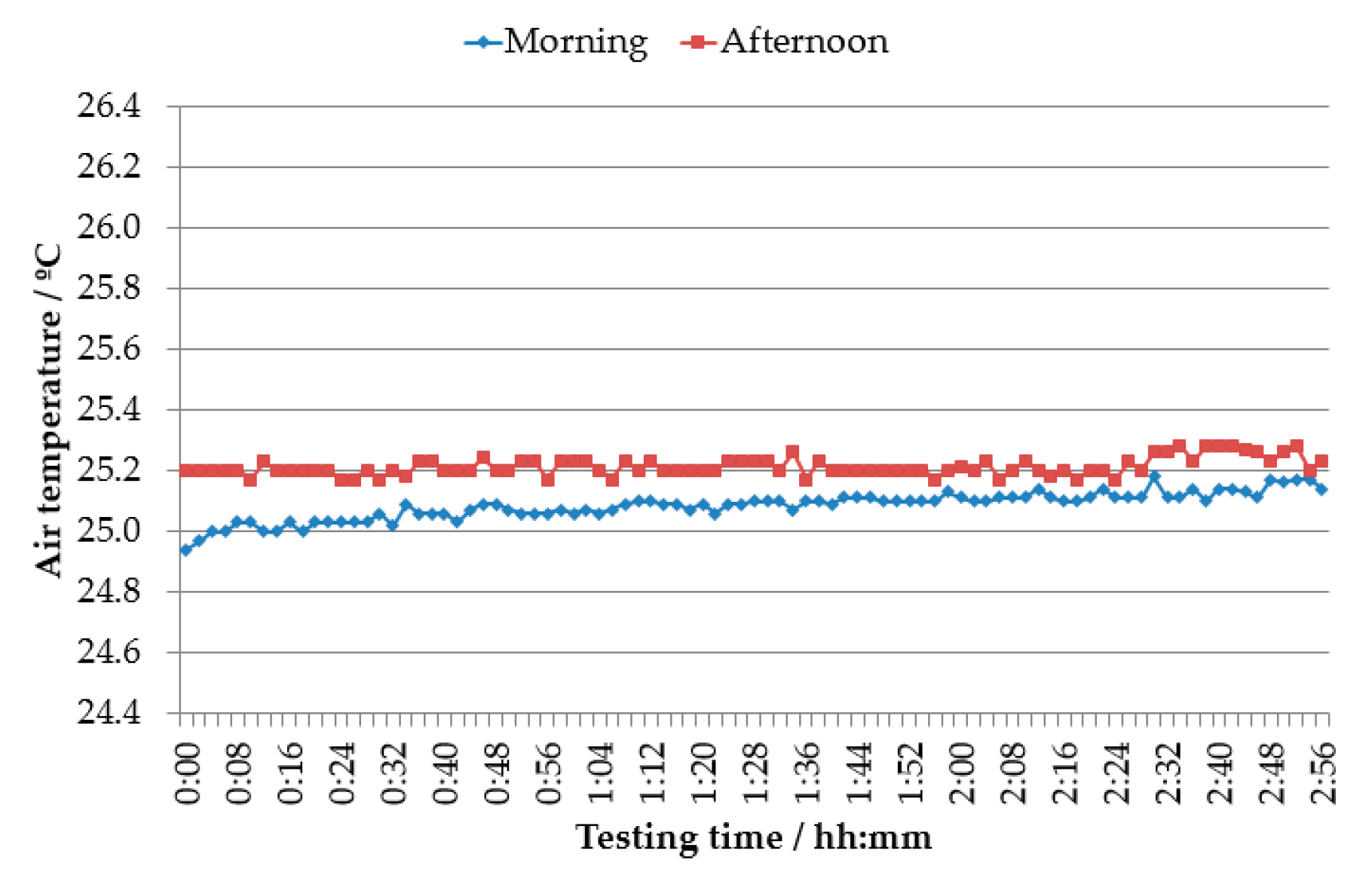
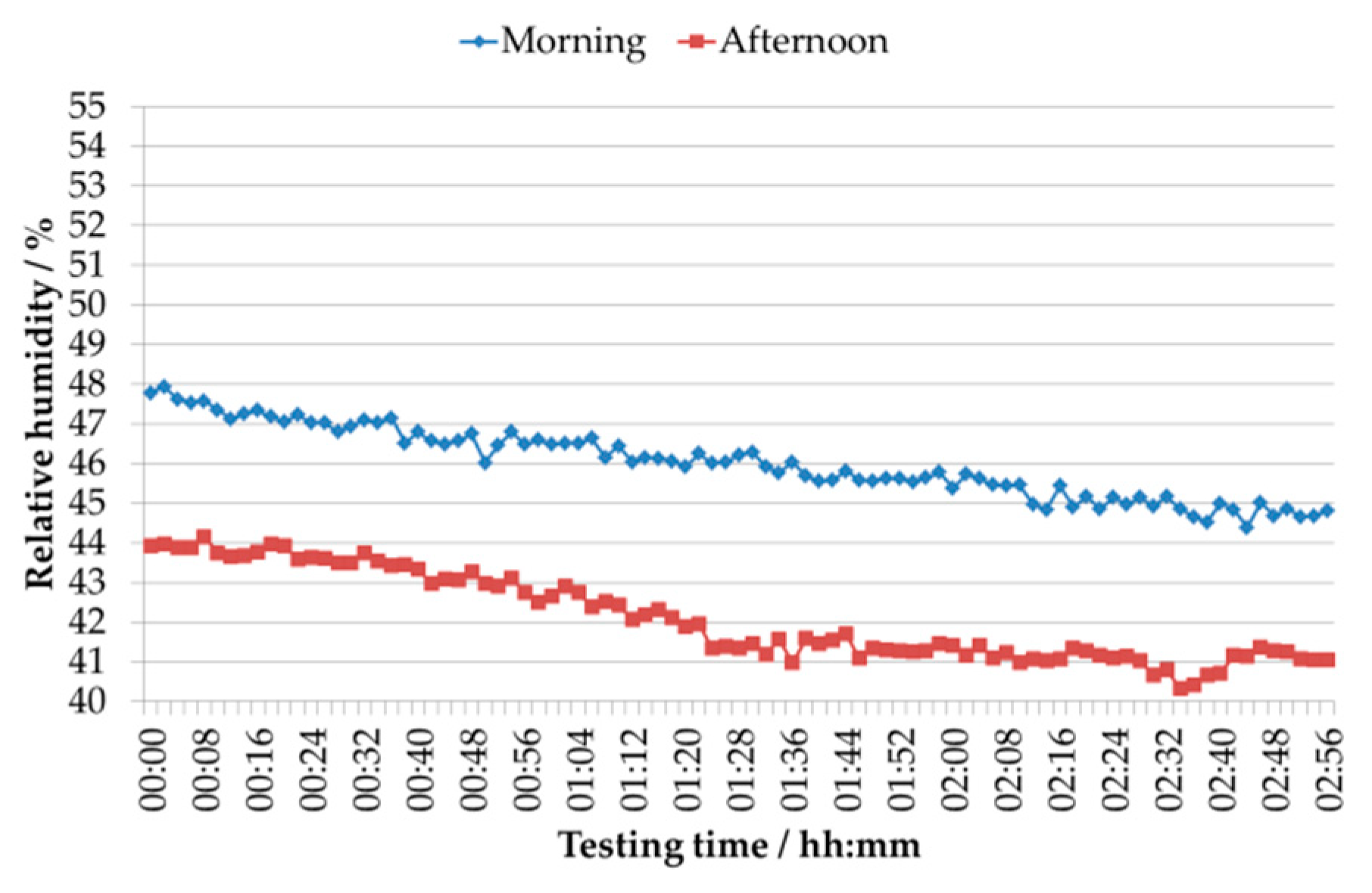
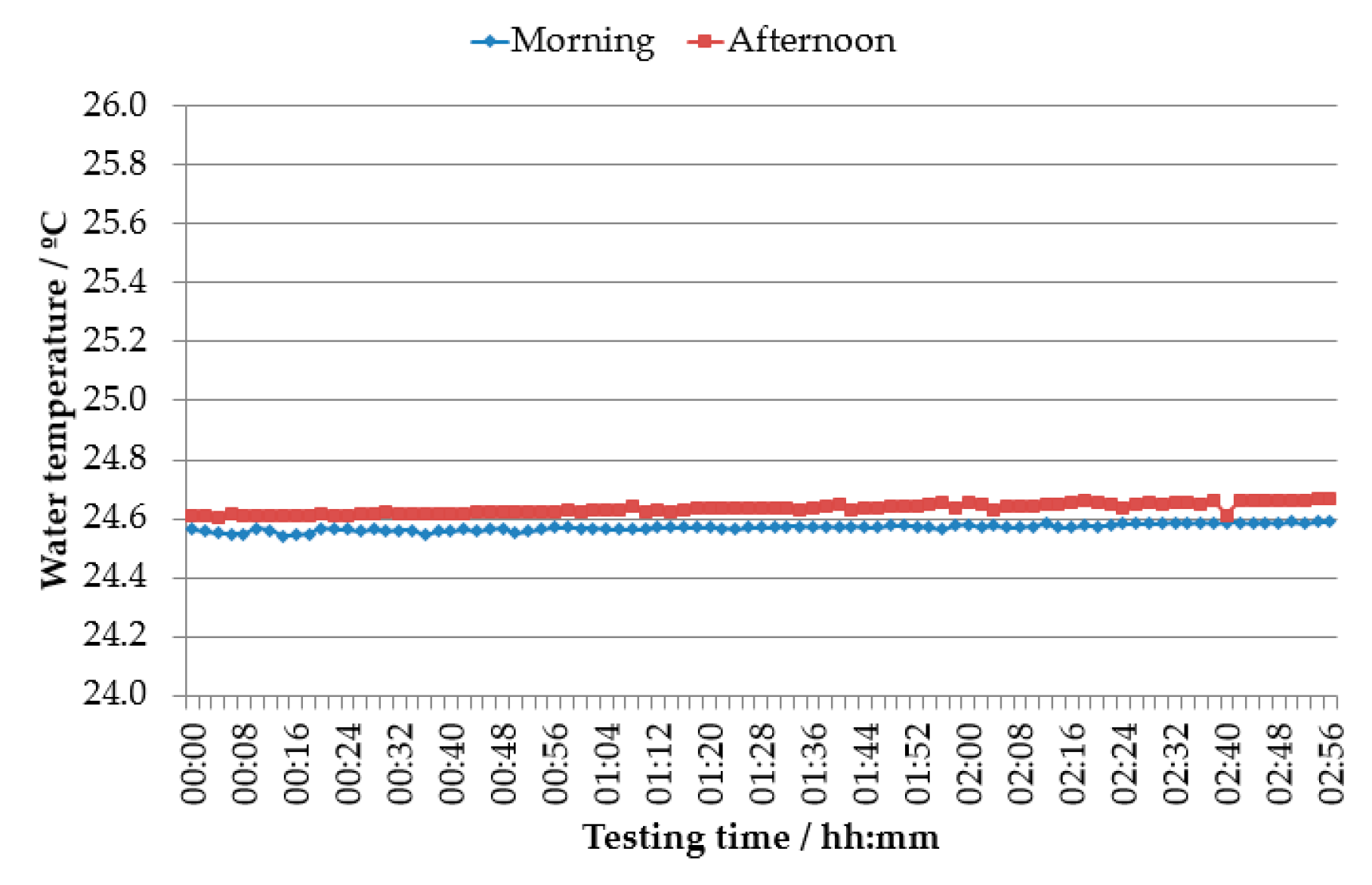
It should be noted that, the laboratorial testing of conductance transducers is performed in a controlled environment, which is significantly different from the application scenario of conductance transducers in maritime reduced-scale models, constructed in large experimental indoor infrastructures, where influence quantities, such as air temperature and relative humidity, water temperature, and electrical power supply, show a larger variation.
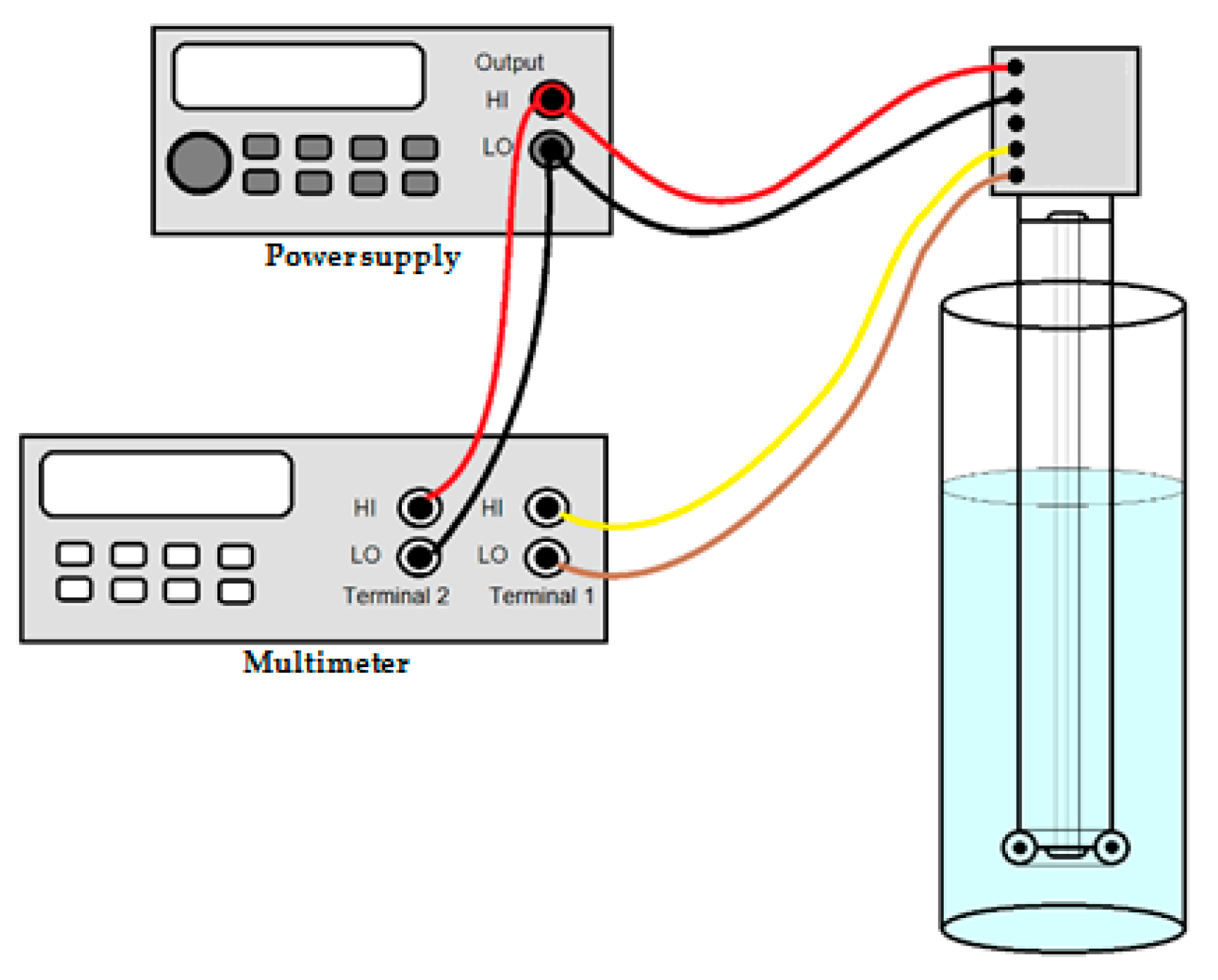
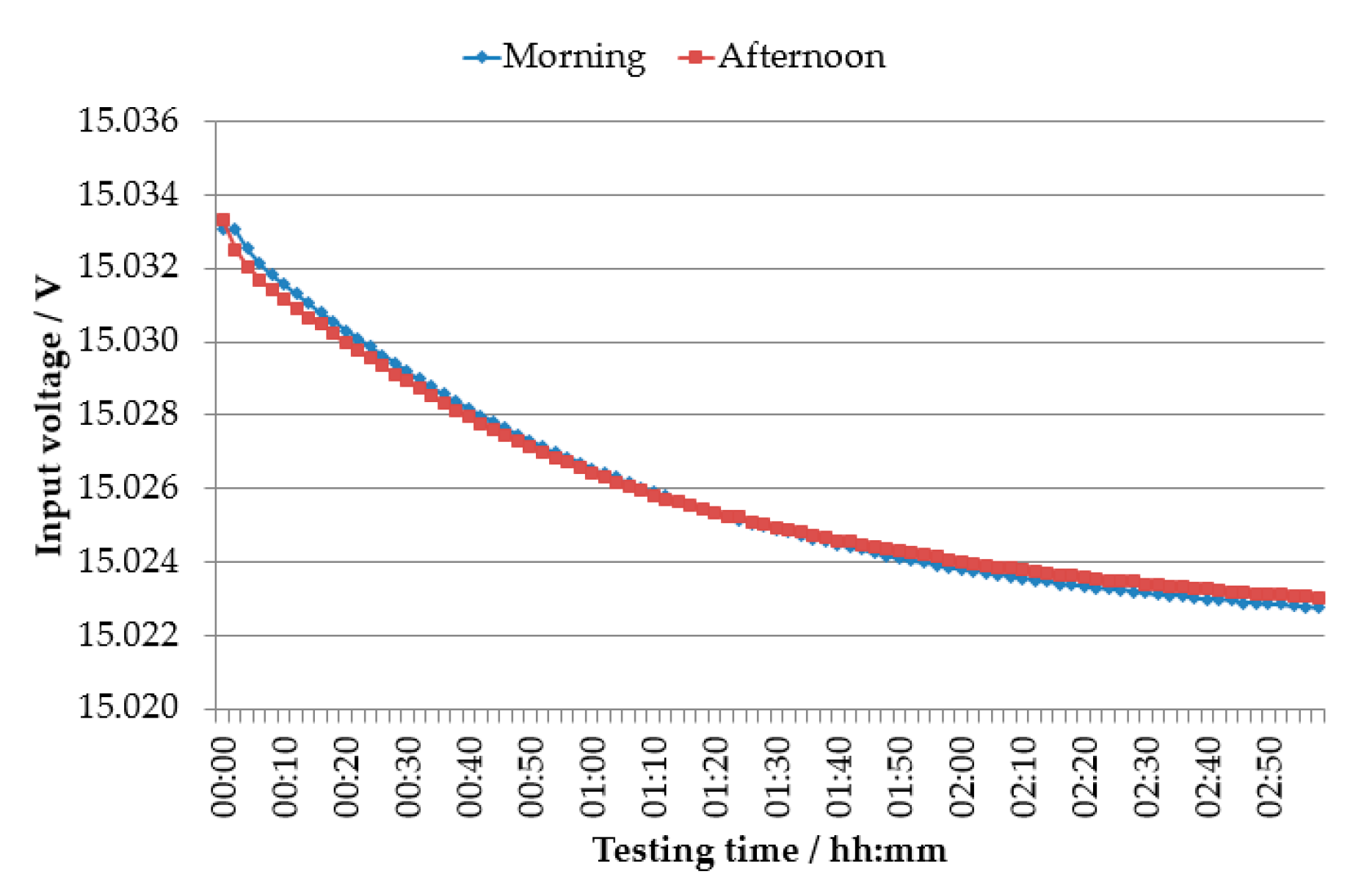
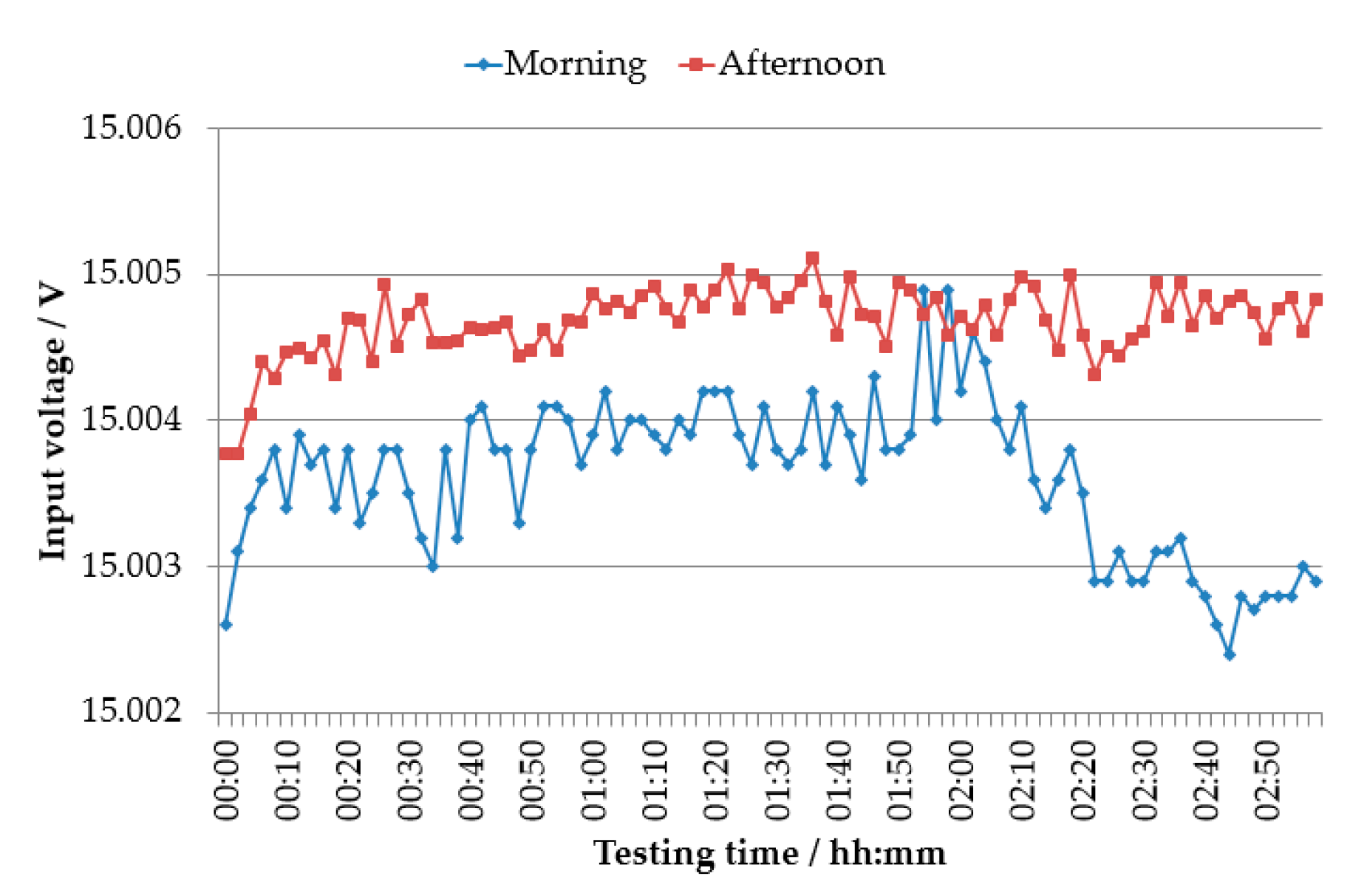
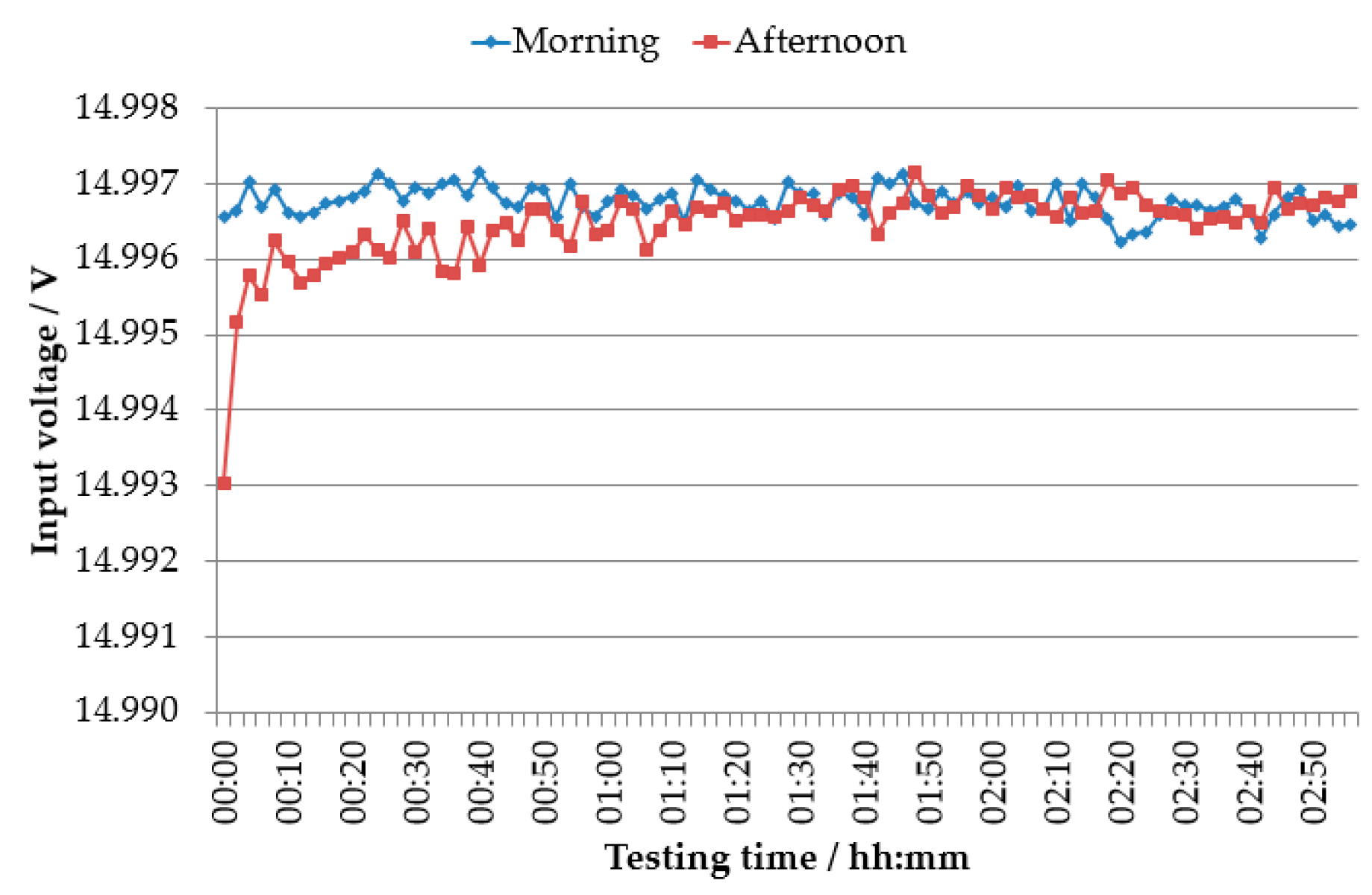
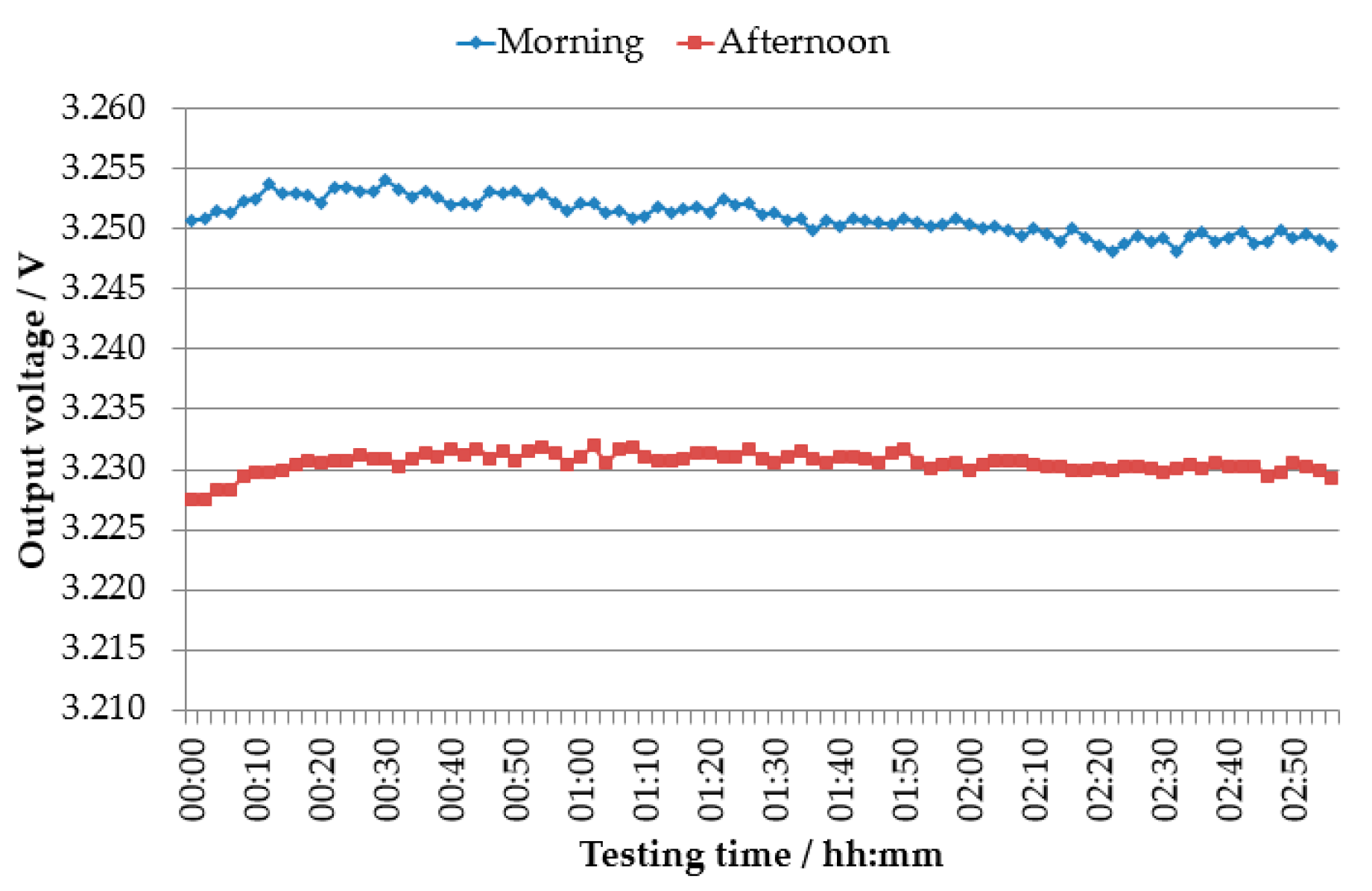
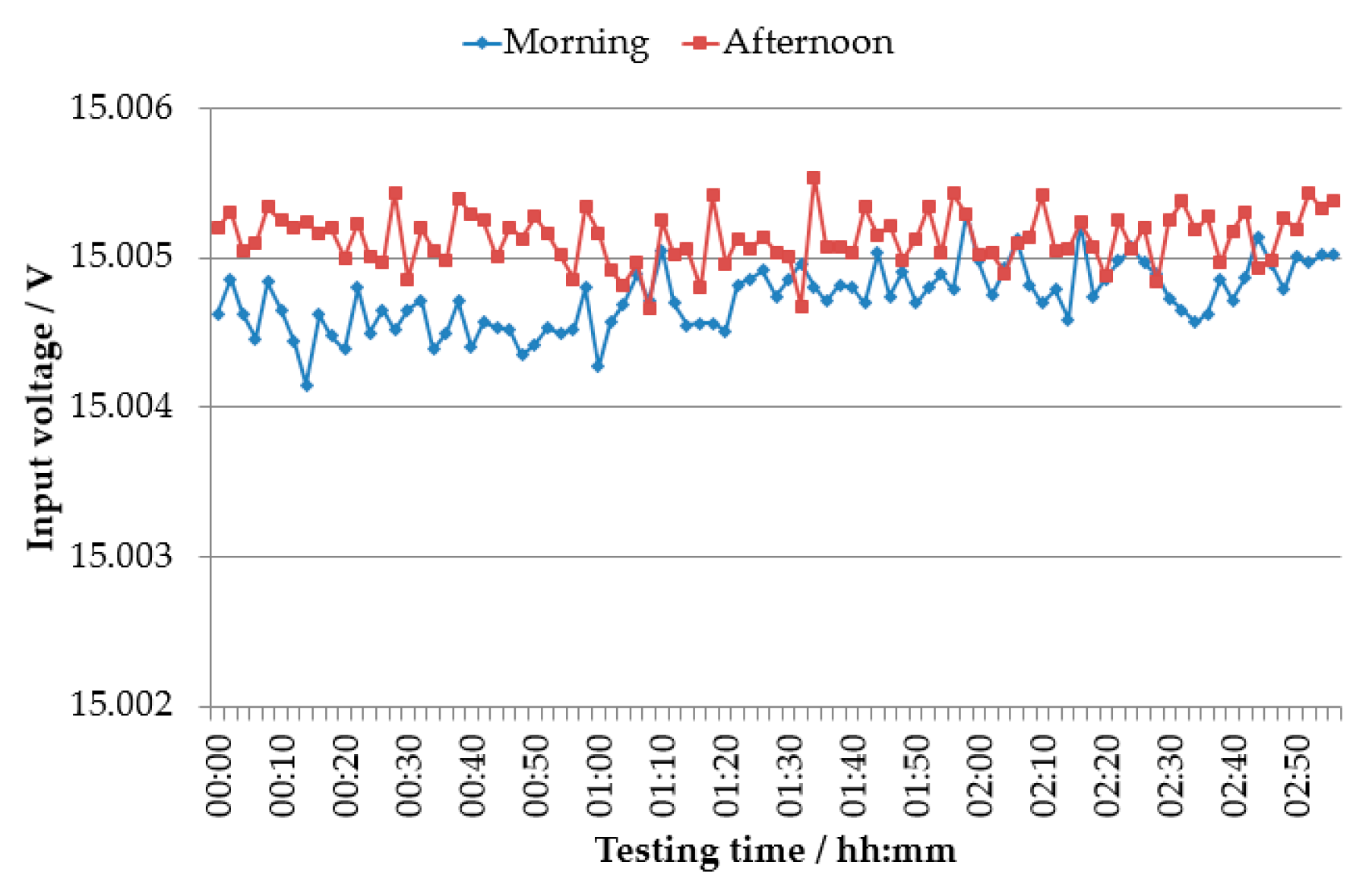
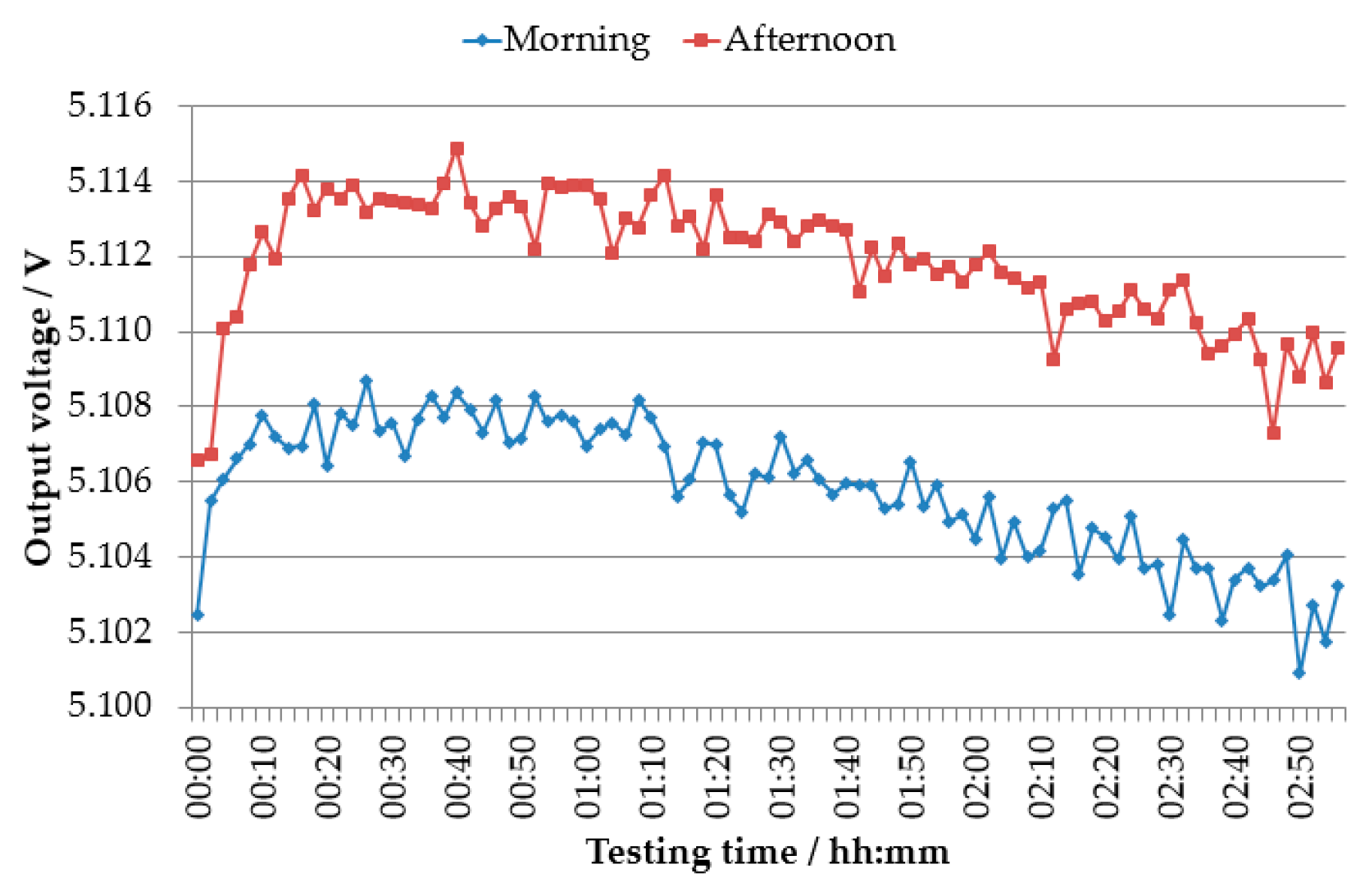
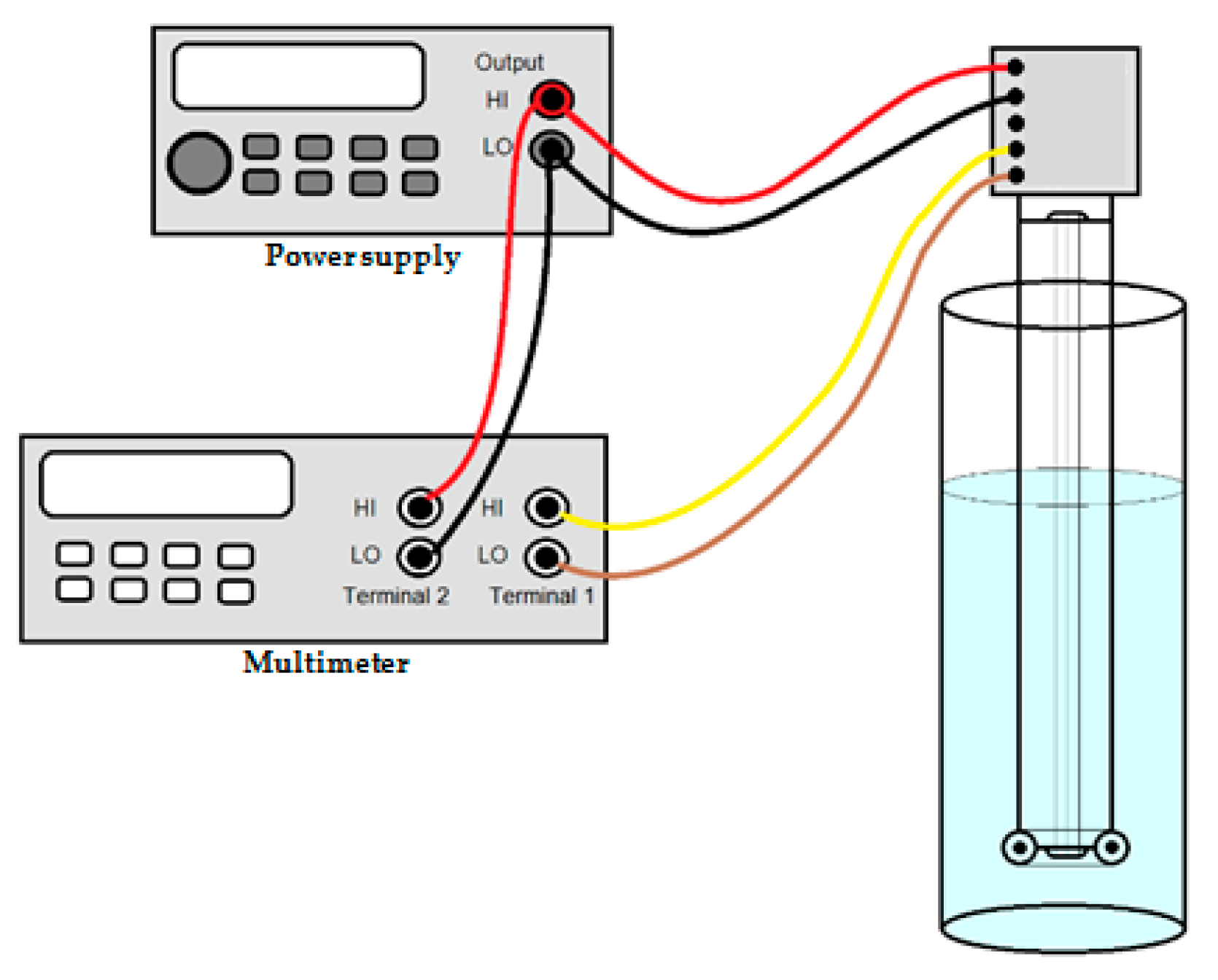
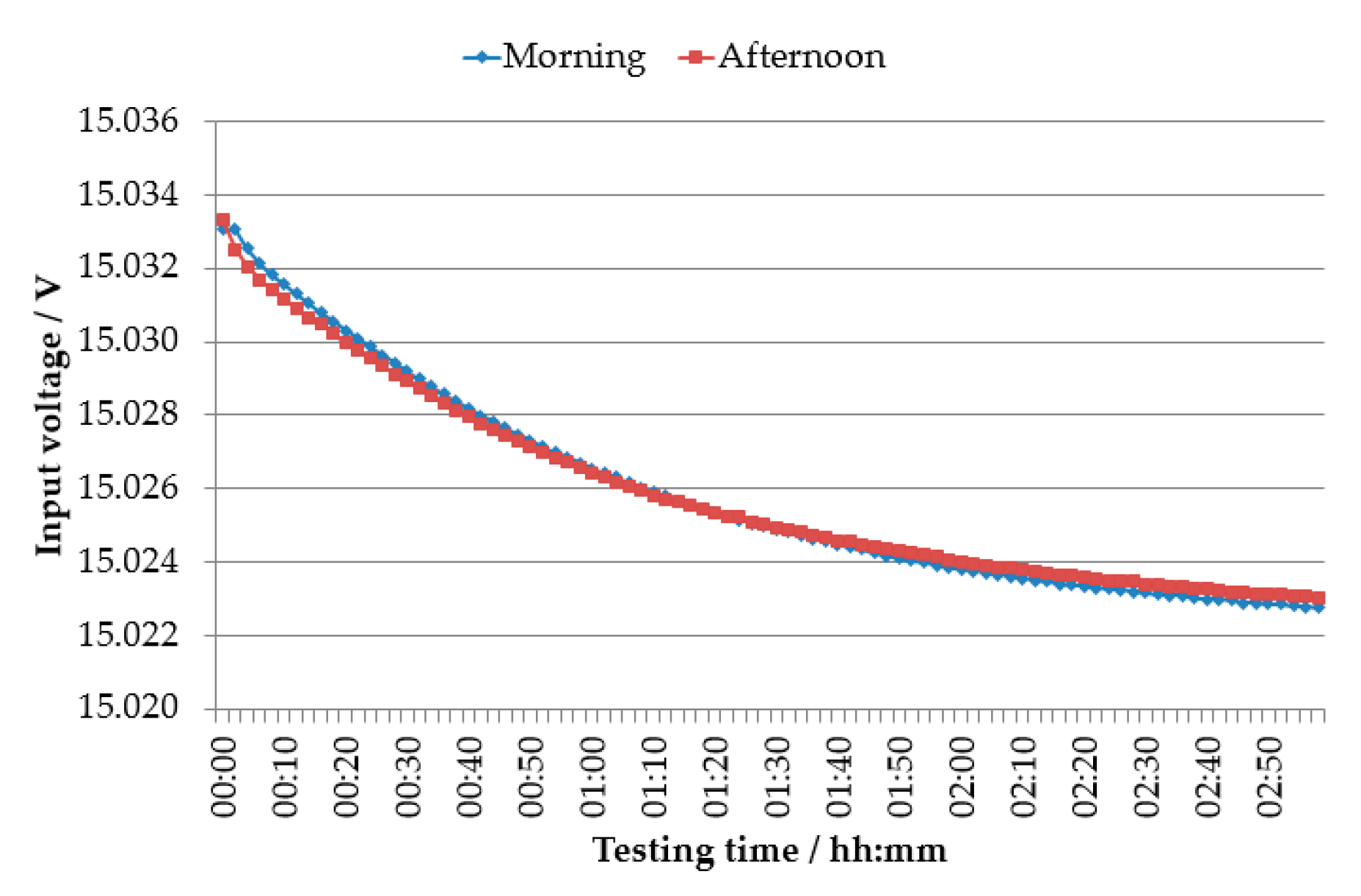
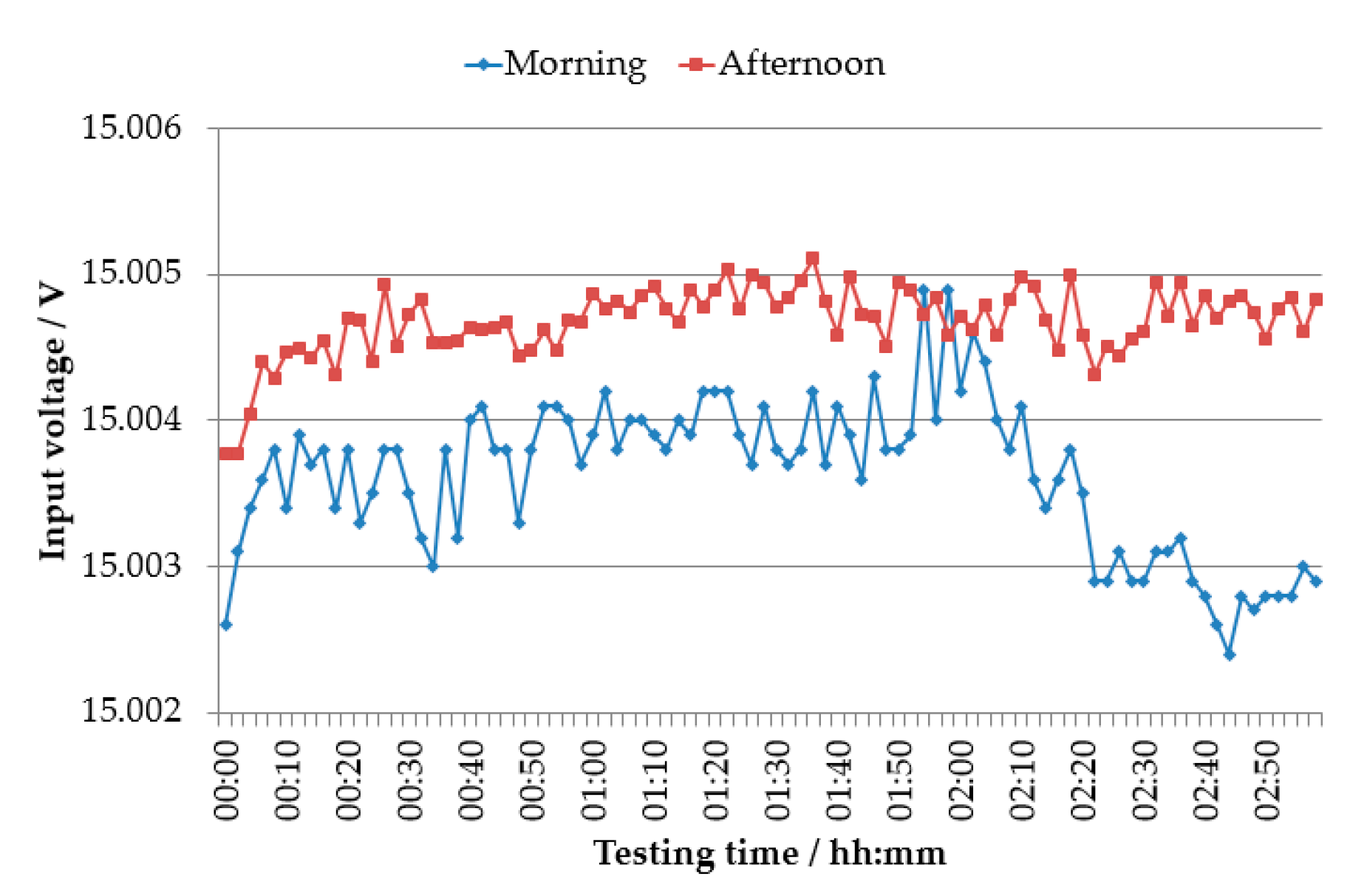
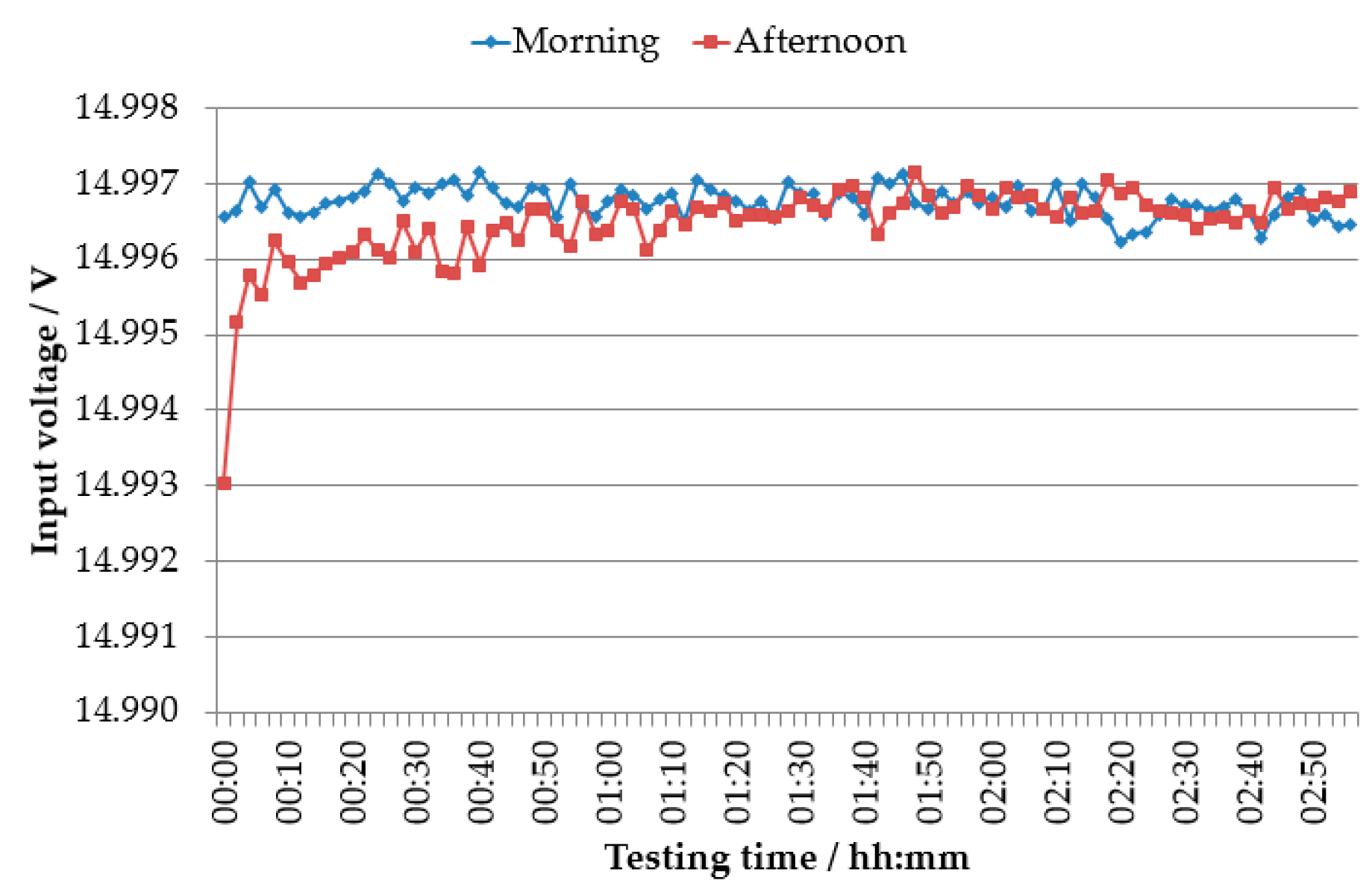
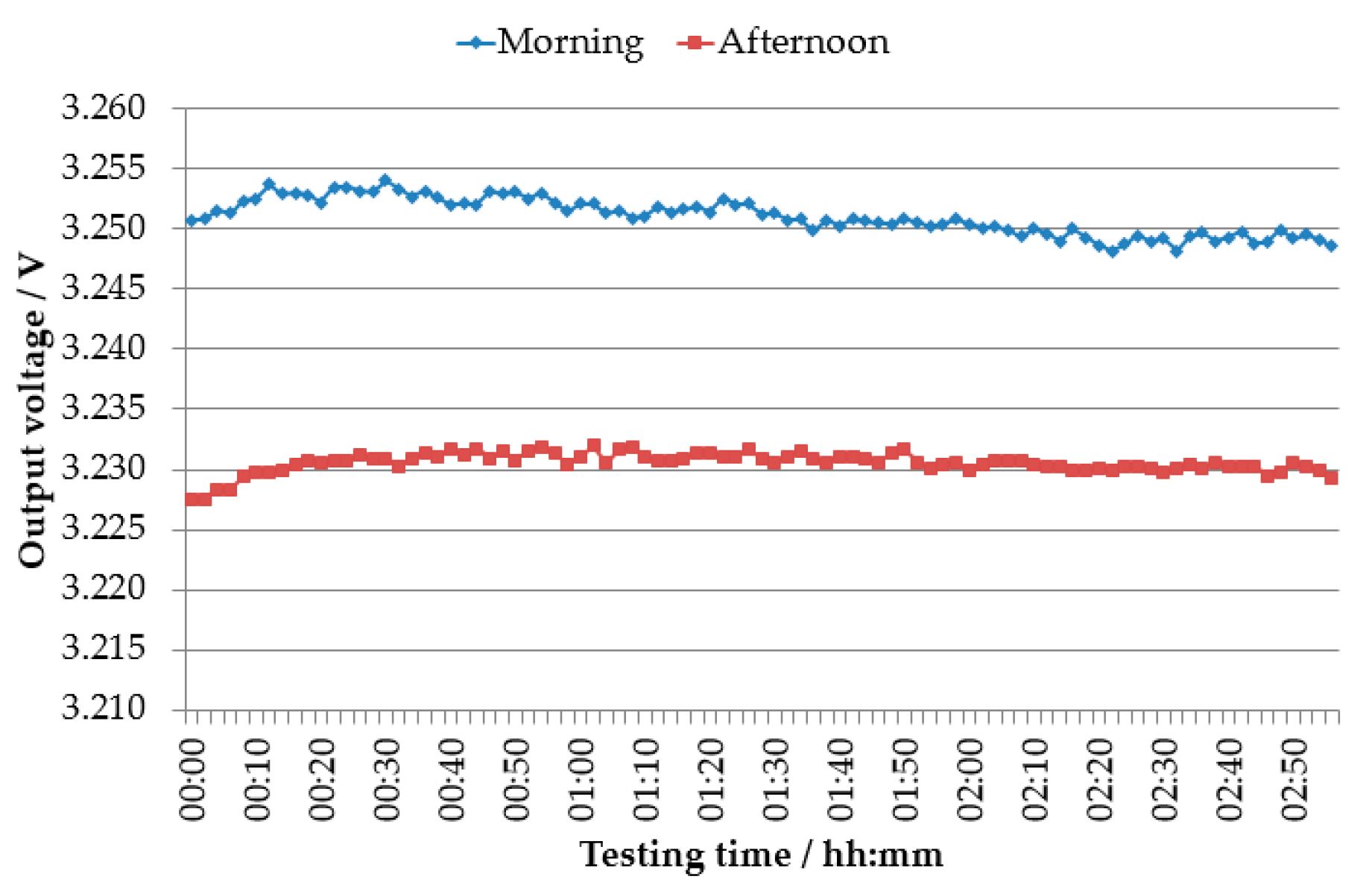
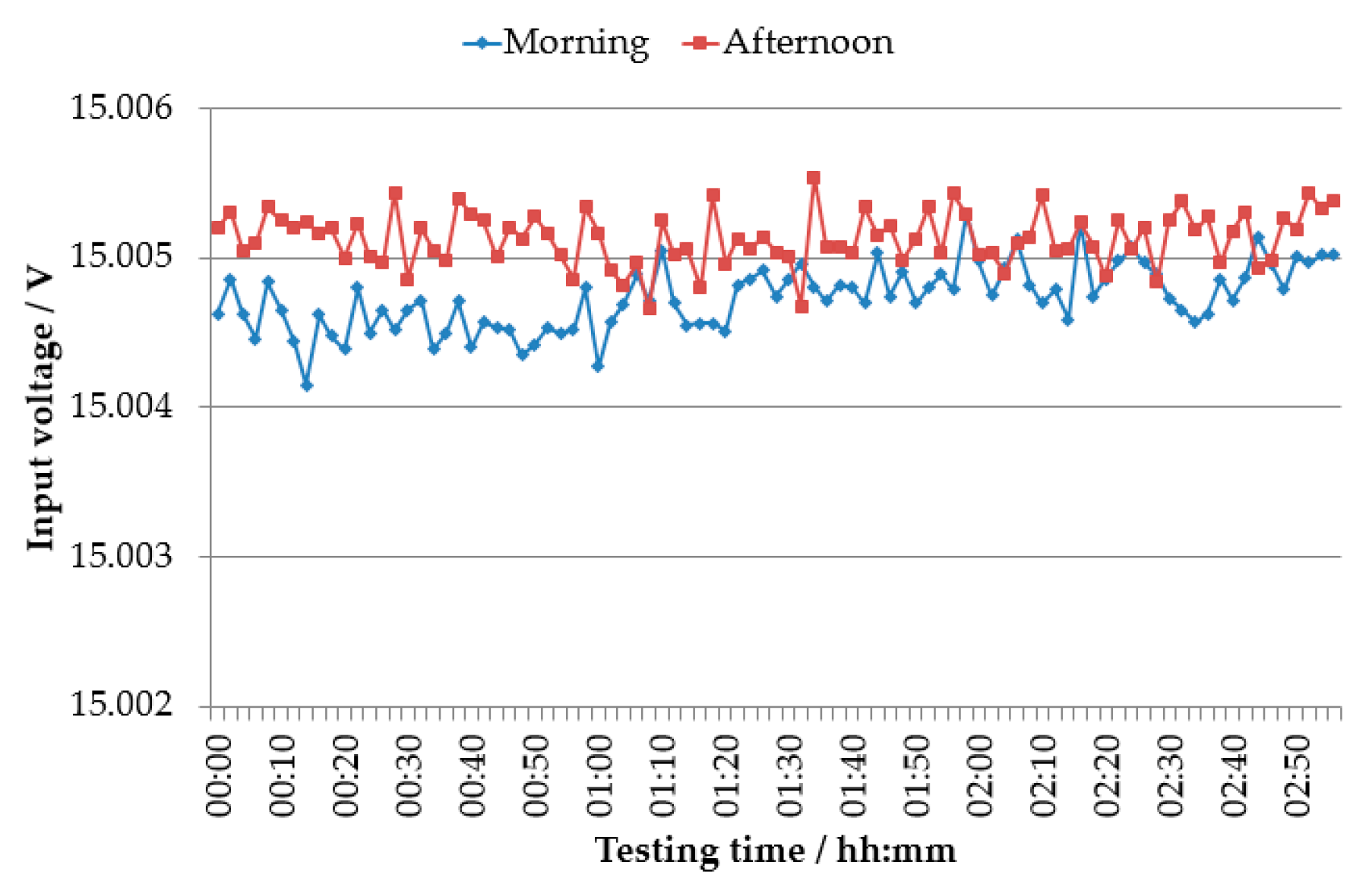
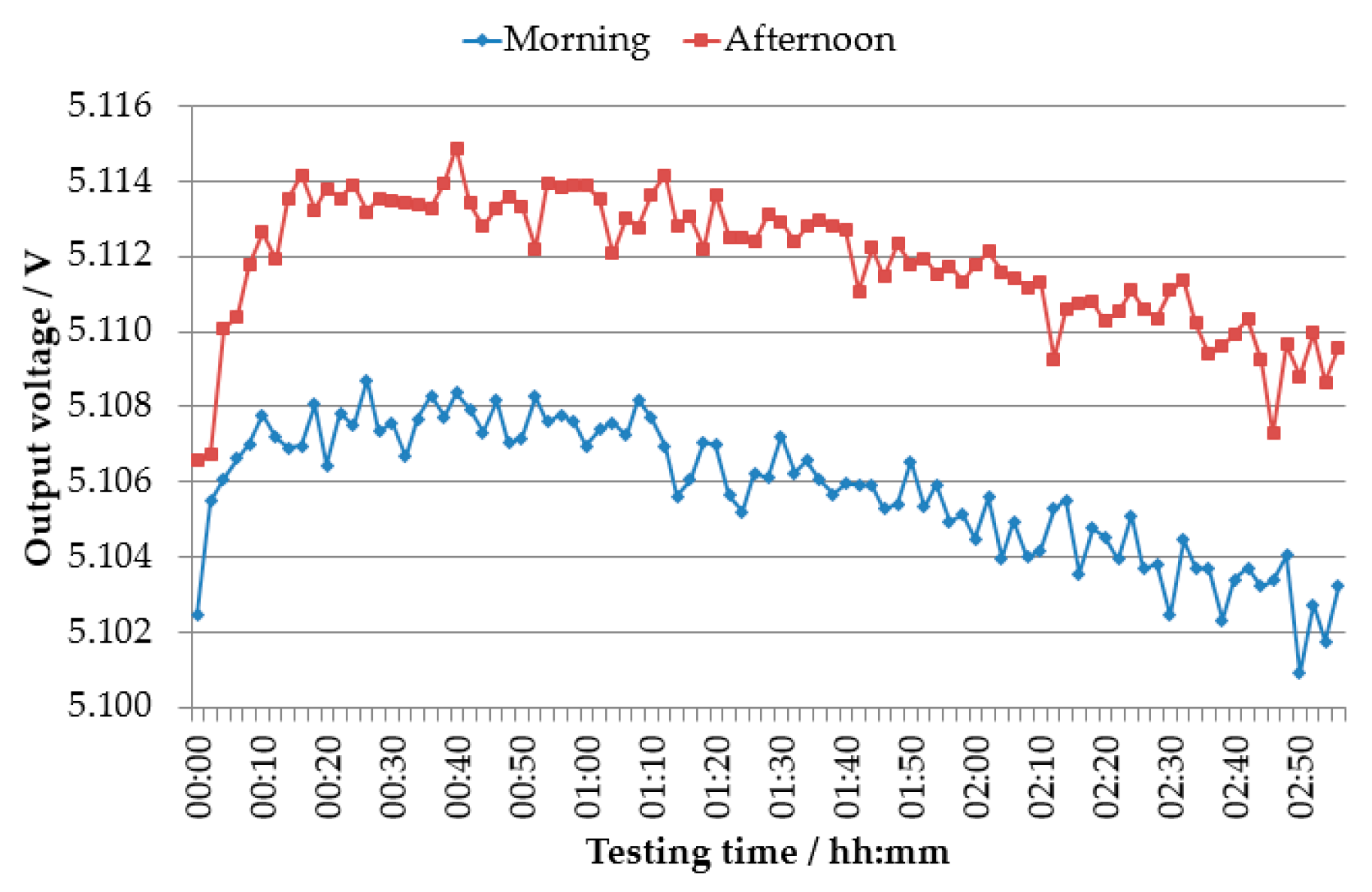
The characterization method of the electrical stability is divided in two parts: (i) power supply testing, in an empty condition (without connection to a conductance transducer) and a nominal input voltage set point of 15 V (DC); and (ii) the loaded condition test, where the same input voltage is applied to a conductance transducer, in a fixed half-immersion position in water, as schematically represented in
Figure 2.
These tests were performed with two power supplies: (i) an off-the-shelf power supply (Agilent, model U8001A, Santa Clara, CA, USA), used for the testing of conductance transducers at laboratory; and (ii) a custom-made power supply (design and produced by LNEC), used for quality control and maintenance activities. The loaded condition test was performed for two conductance transducers (LNEC, internal reference id’s 54.12 and 57.12) with different measurement intervals, respectively, ±400 mm, and ±140 mm.
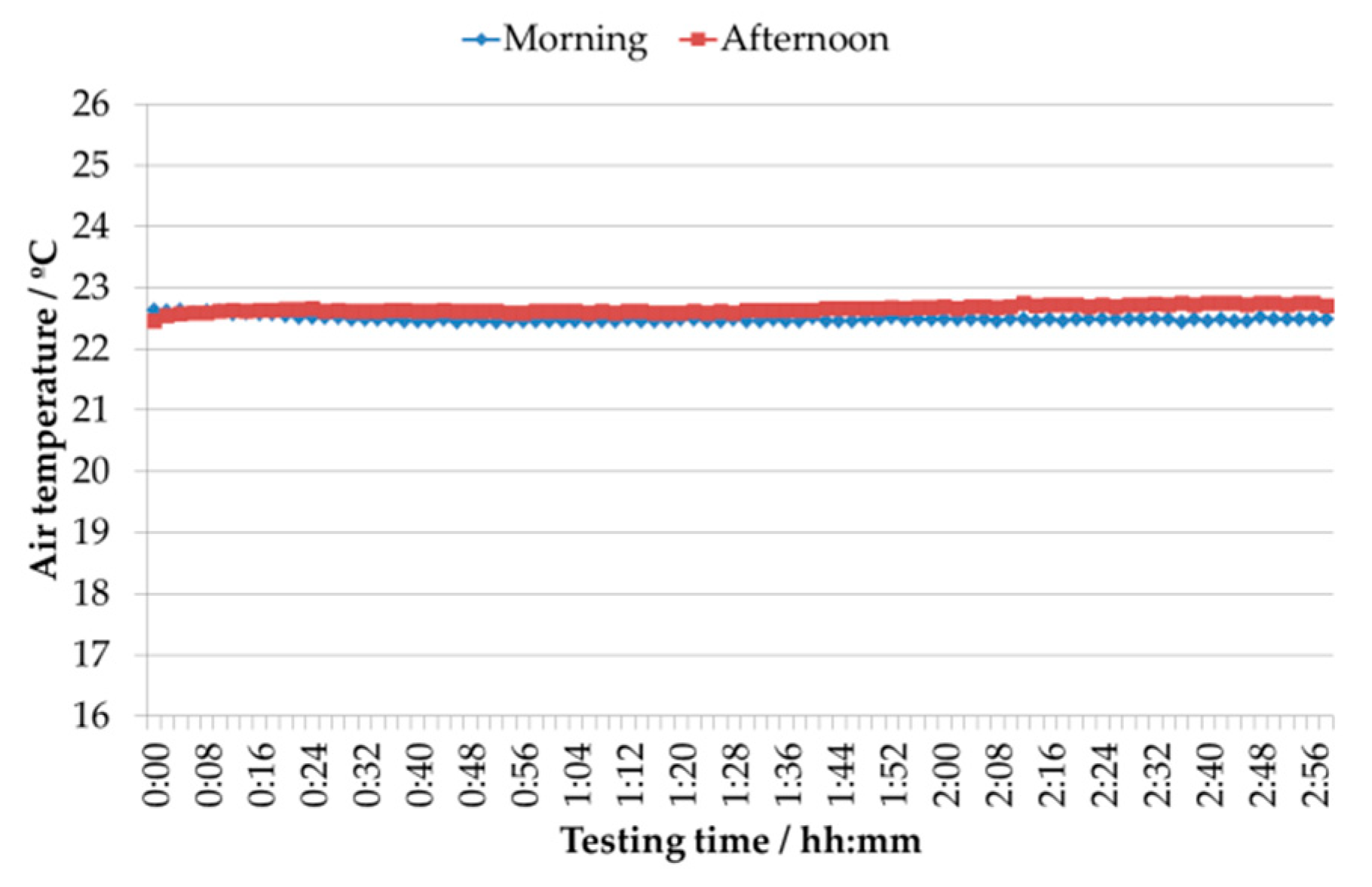
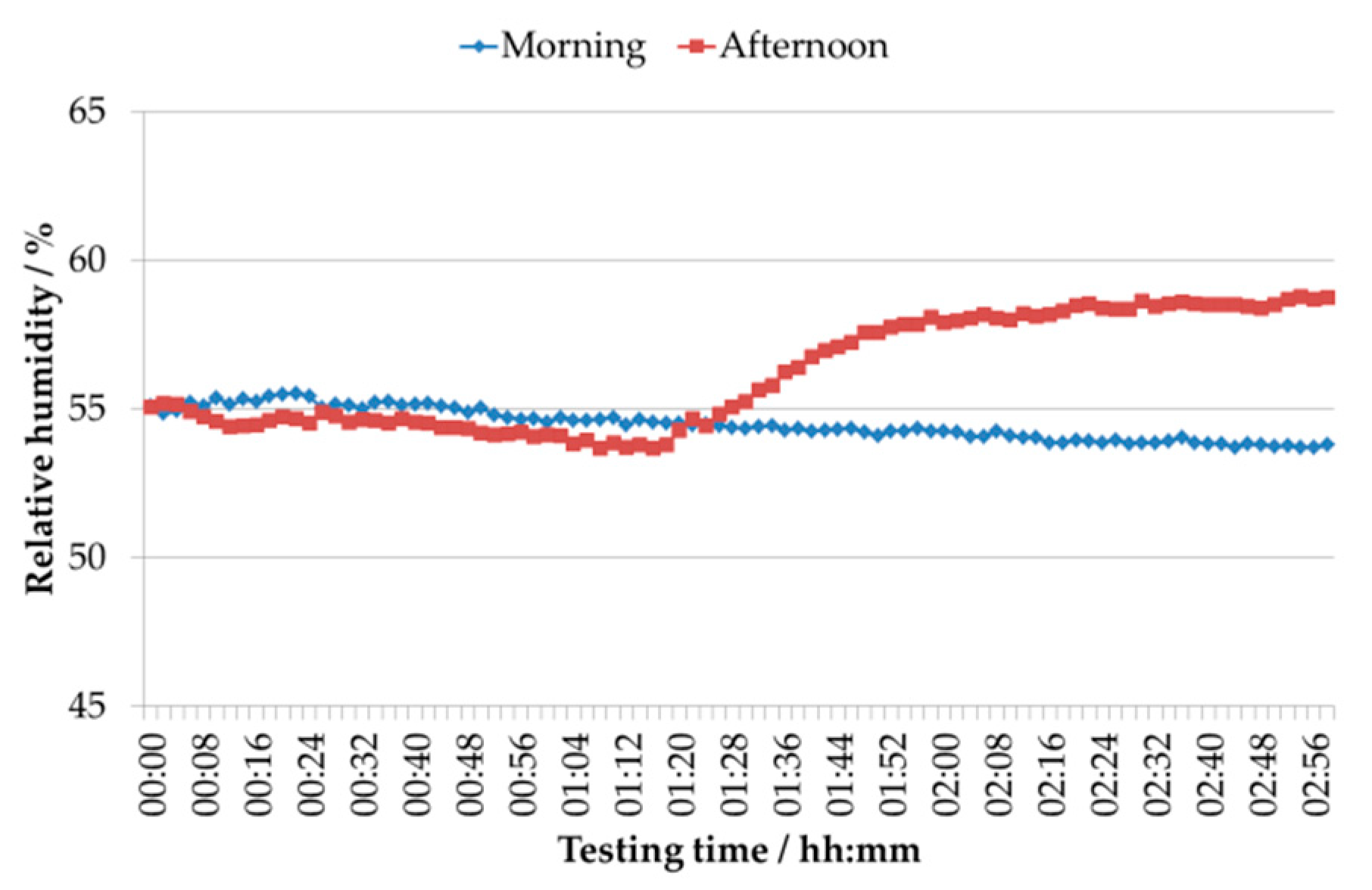
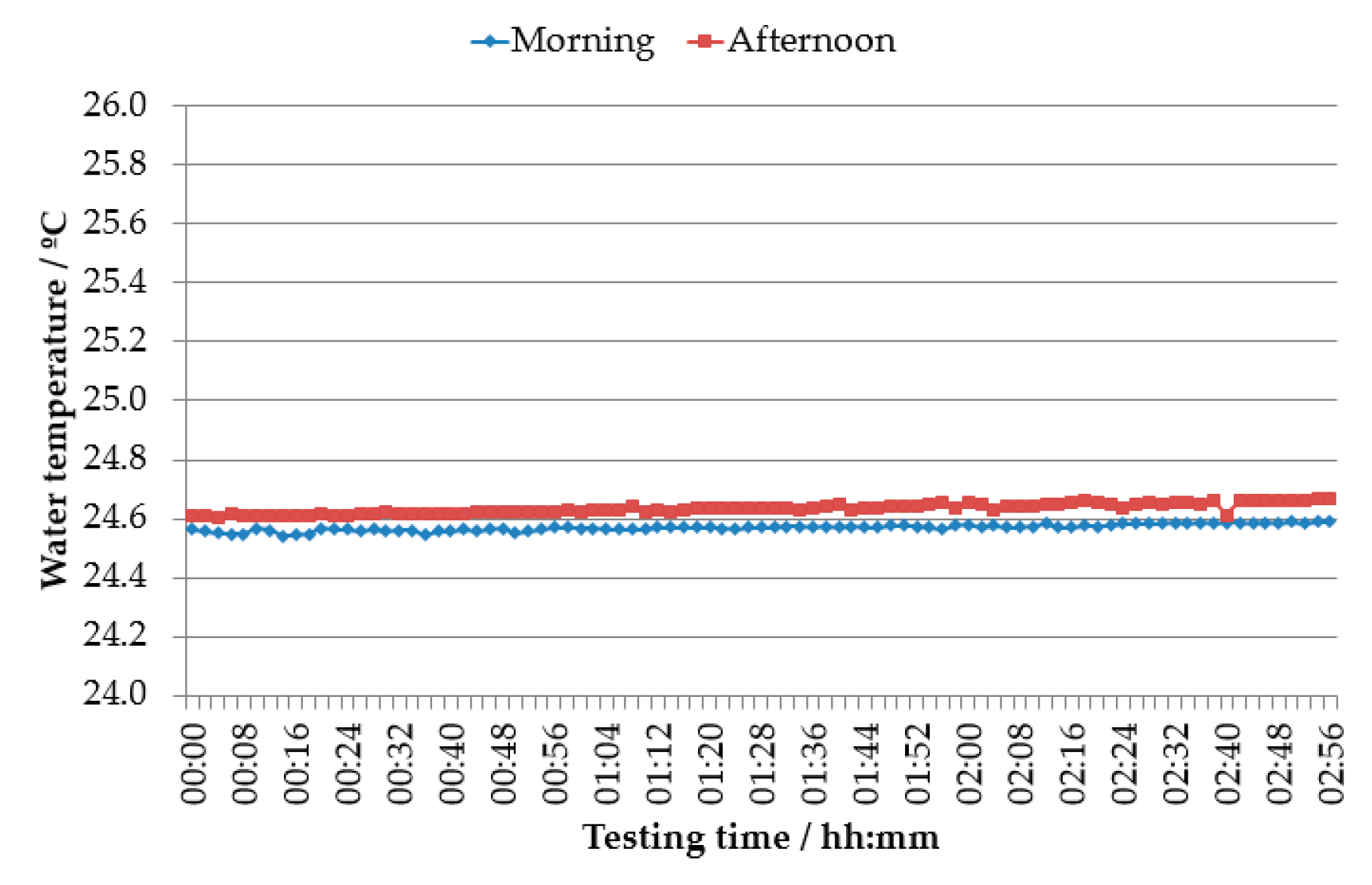
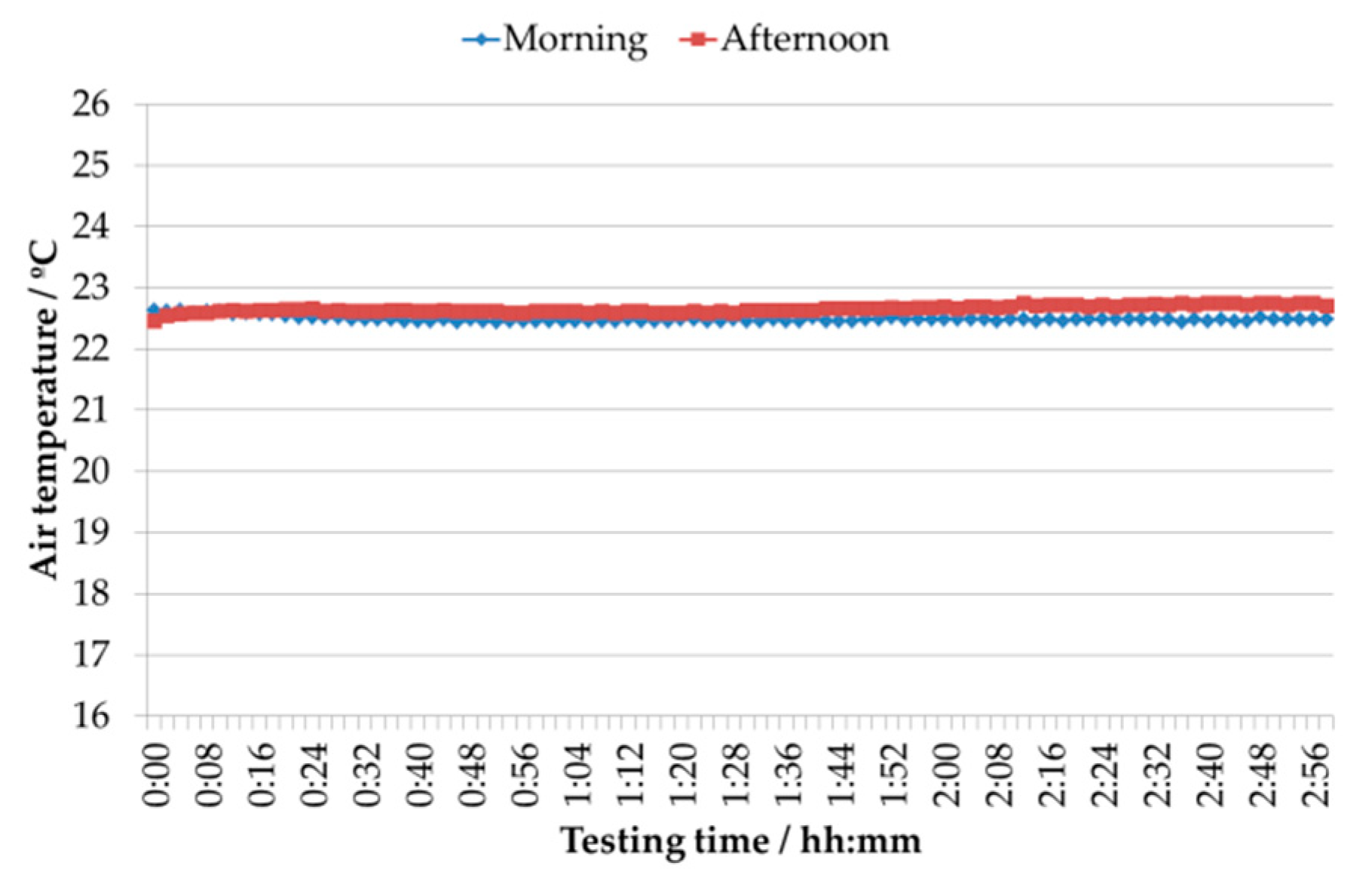
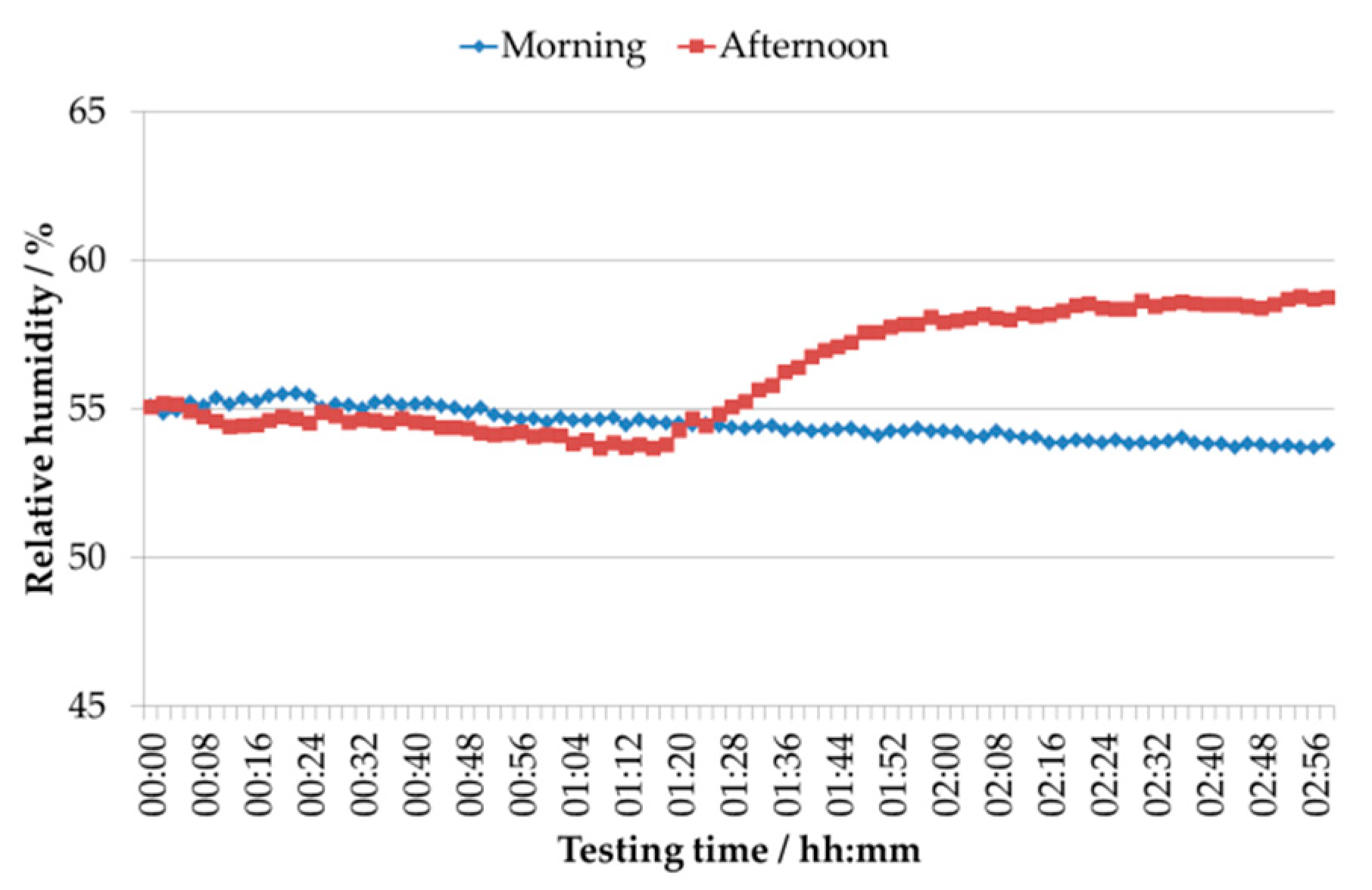
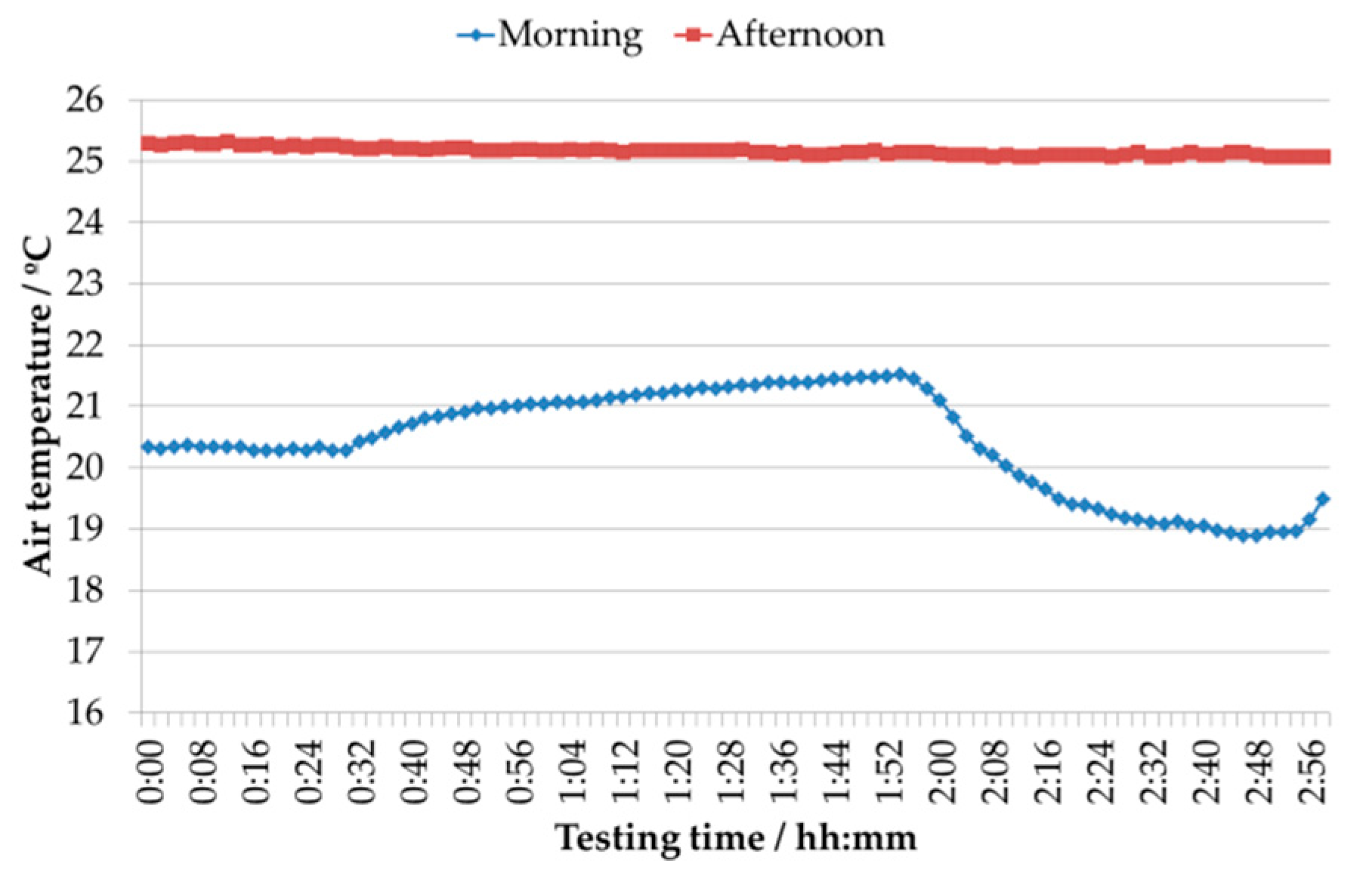
For each test, a three-hour duration was defined, and the voltage (input voltage in both the empty and the loaded condition tests, and the output voltage only in the loaded condition test) were measured considering an acquisition time period of two minutes, using a digital multimeter (HP, model 3457A). The tests were performed in the same laboratorial facility used to determine the conductance transducers linearity, reversibility, and repeatability (described in
Section 3.2). Air temperature and relative humidity measurements were performed with a digital thermohygrometer recorder (Rotronic, model Hygrolog), while the water temperature in the loaded condition test was obtained from a resistance thermometer and a Wheatstone bridge (ASL, model F250). These measurements were performed simultaneously with the voltage measurements above mentioned.
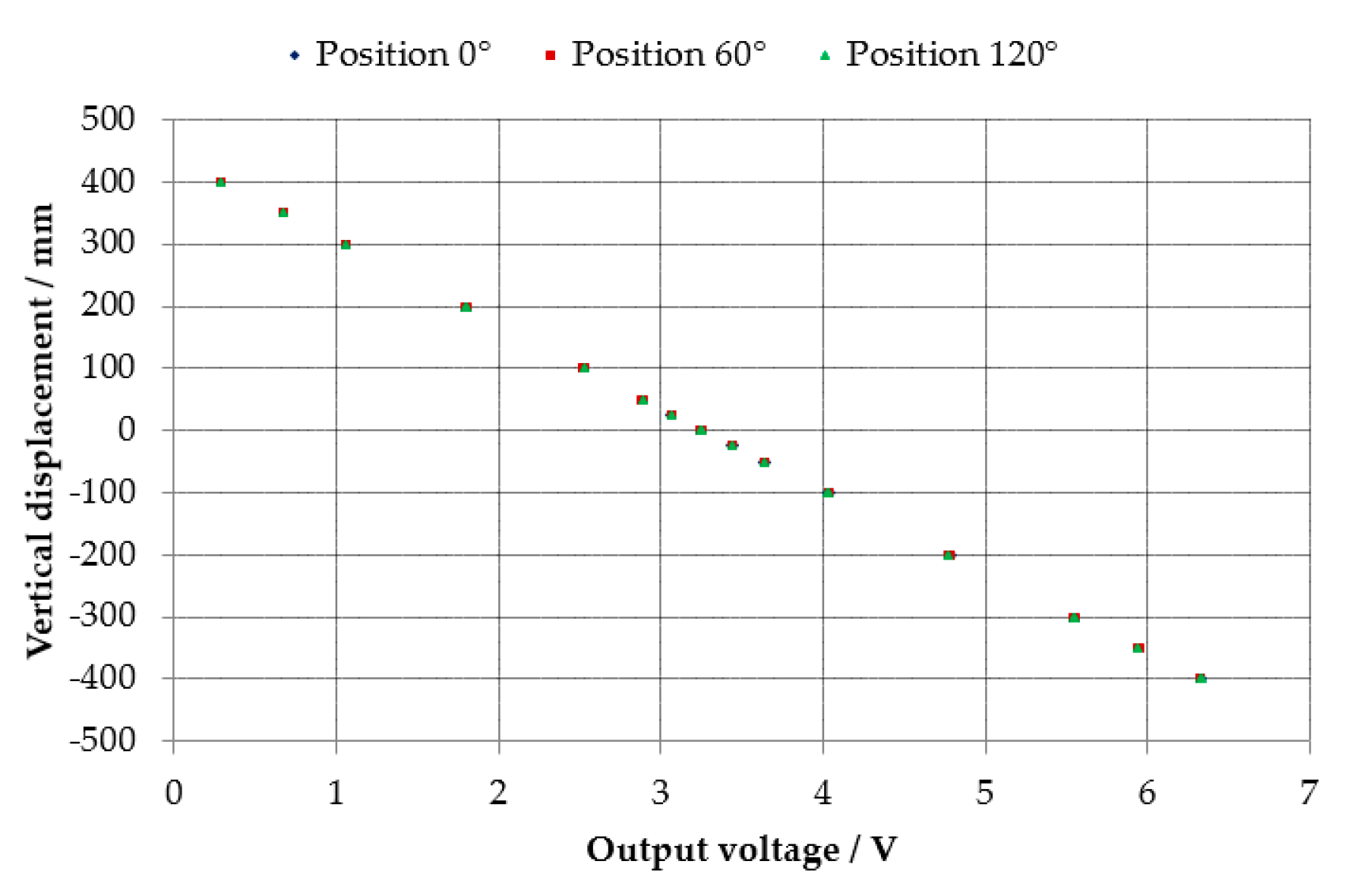
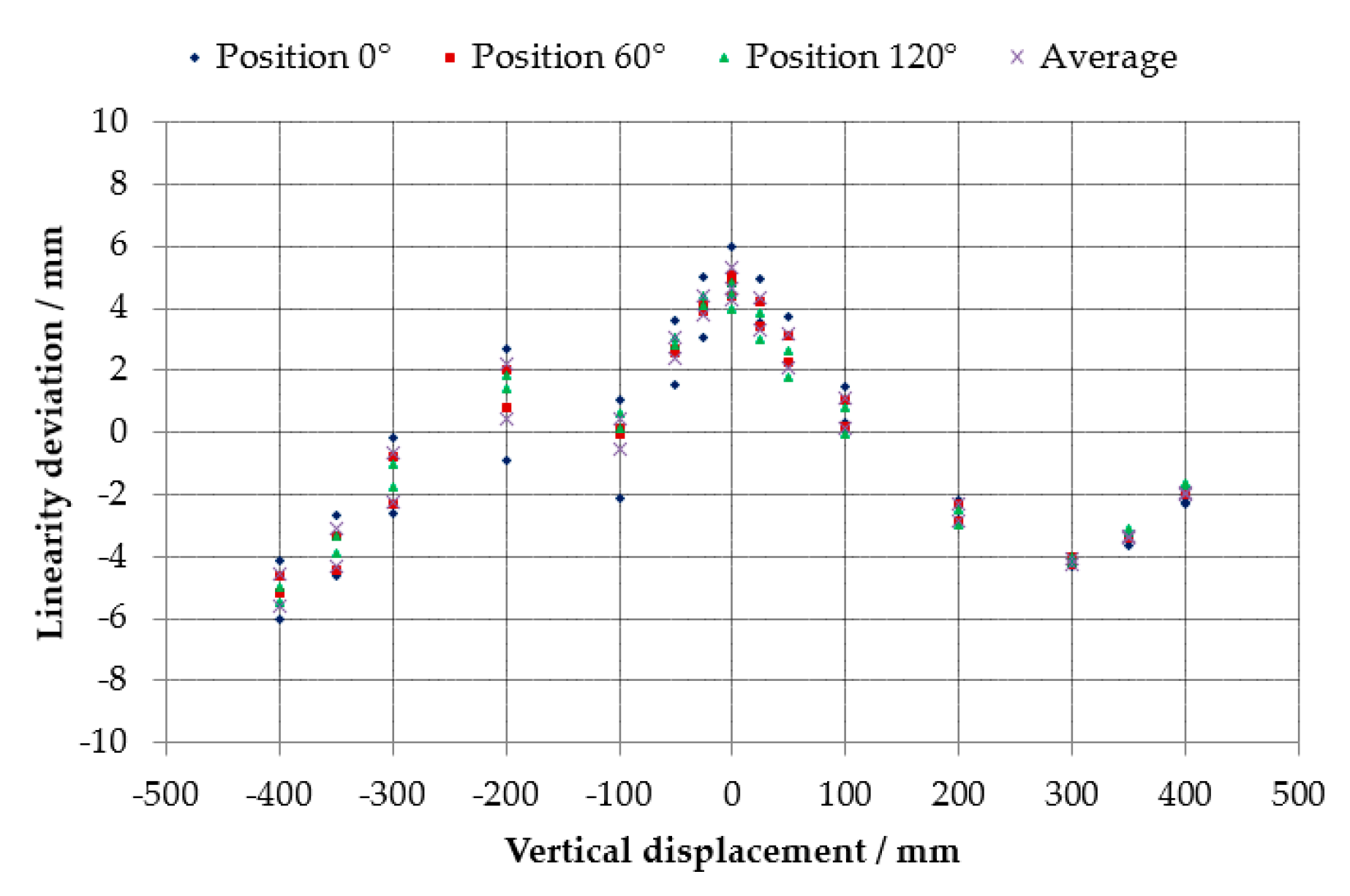
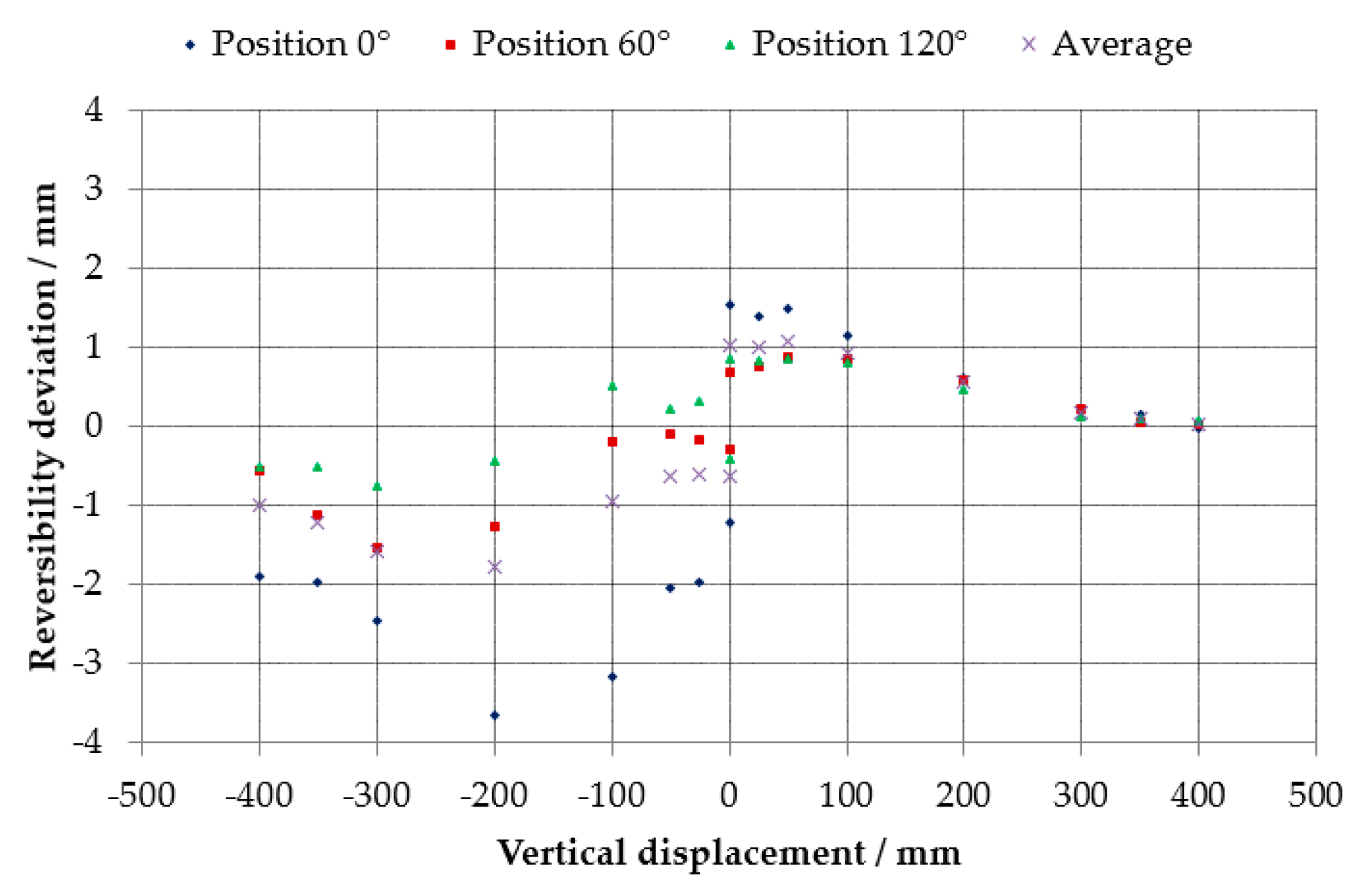
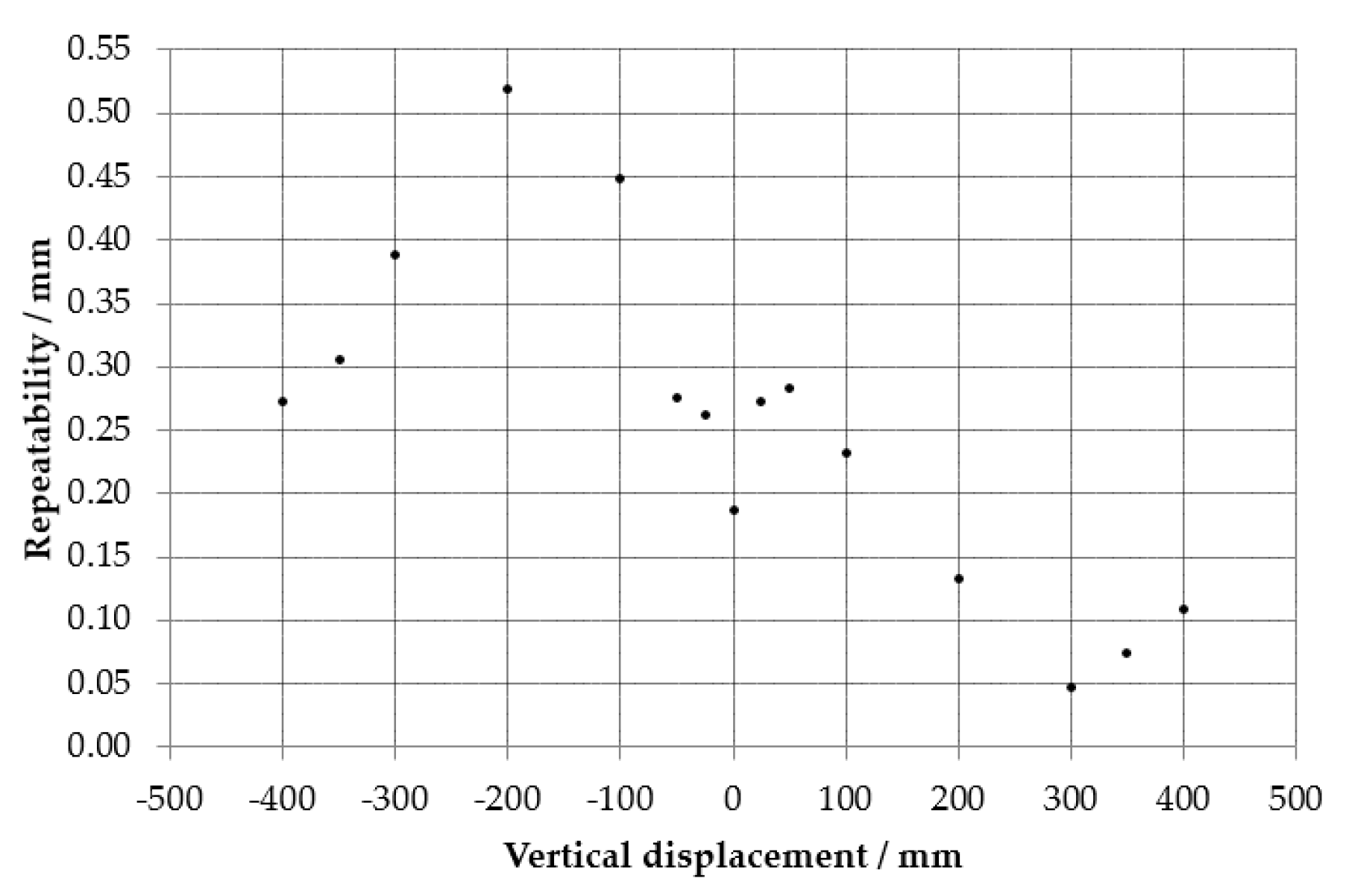
3.2. Linearity, Reversibility, and Repeatability
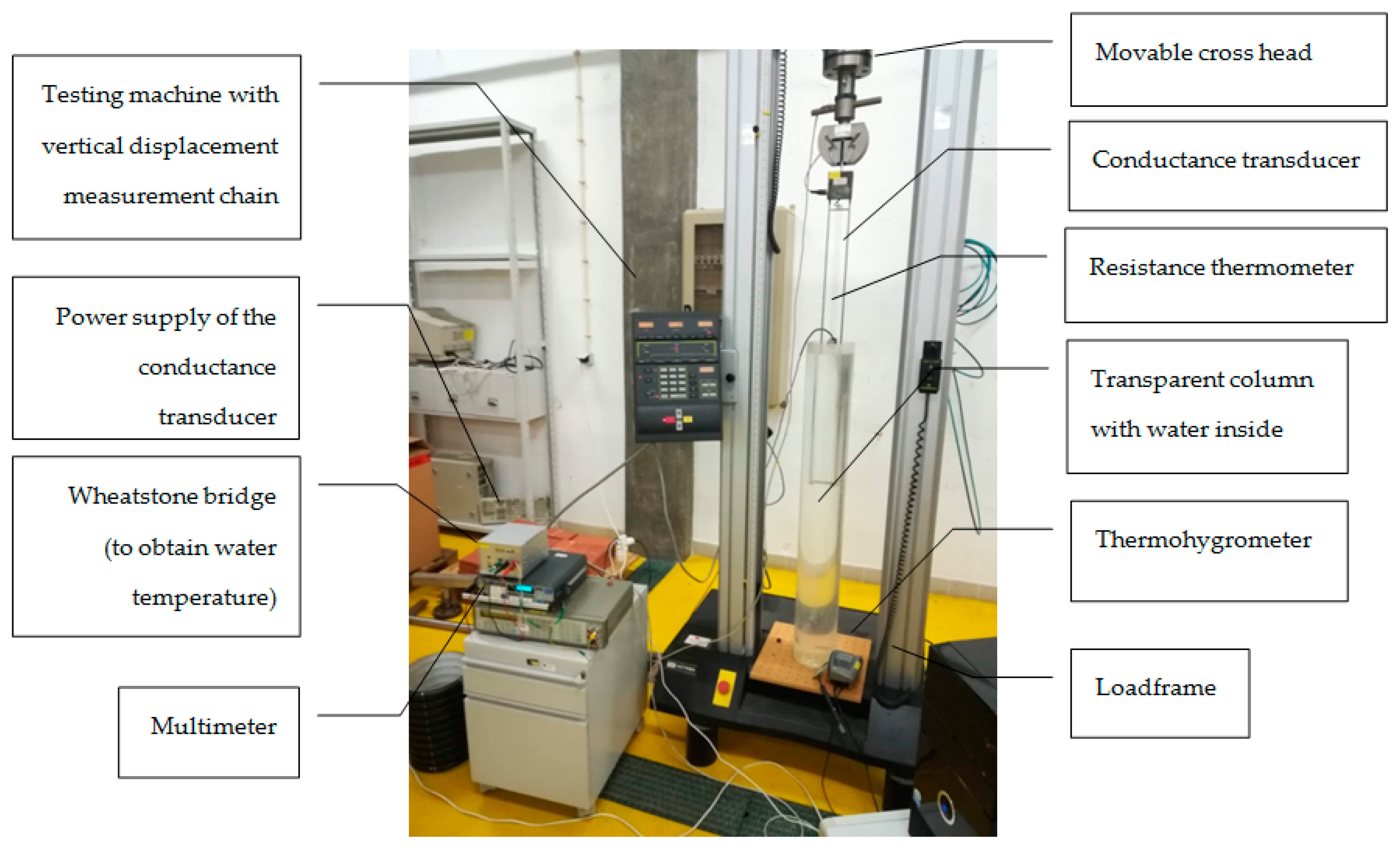
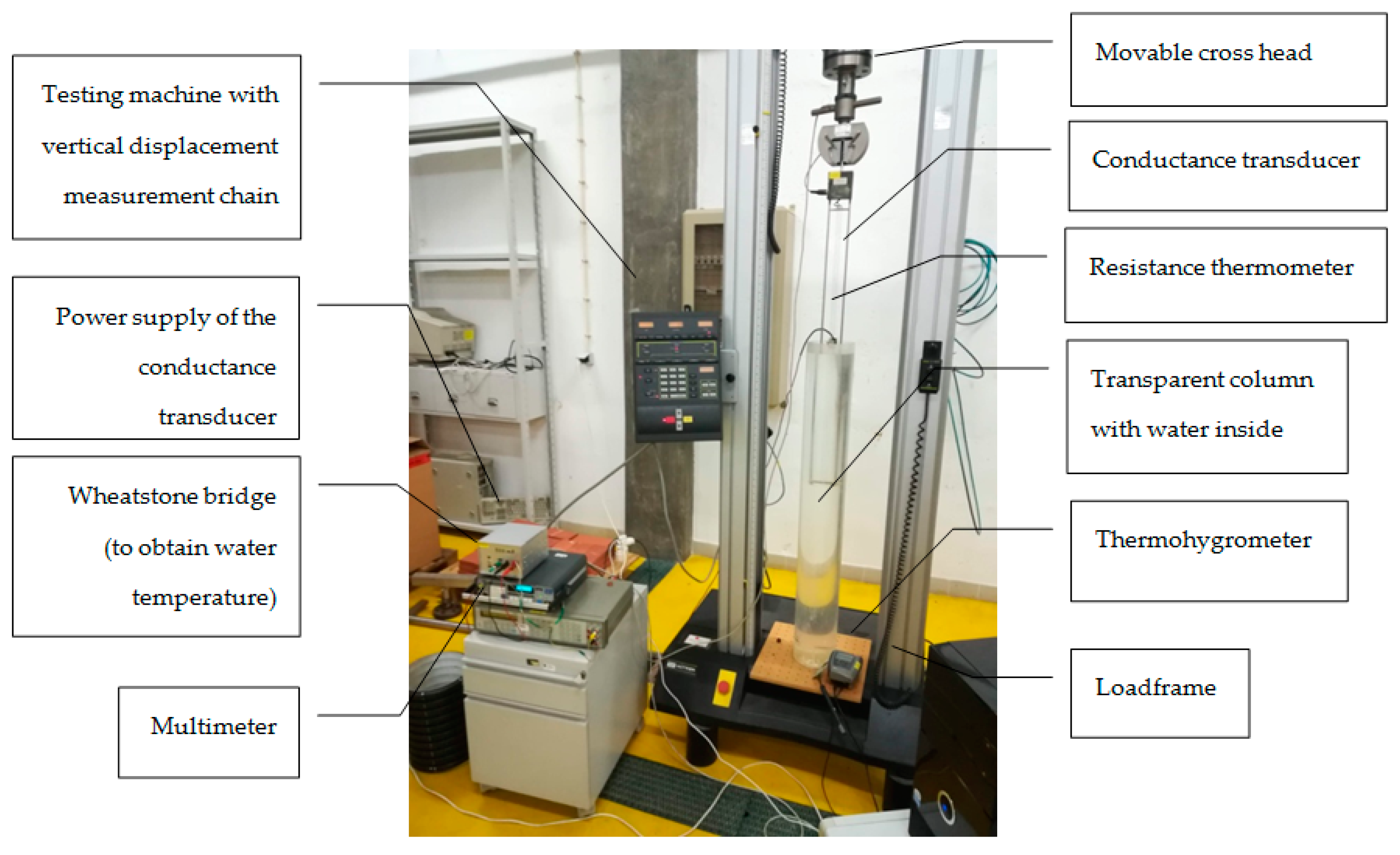
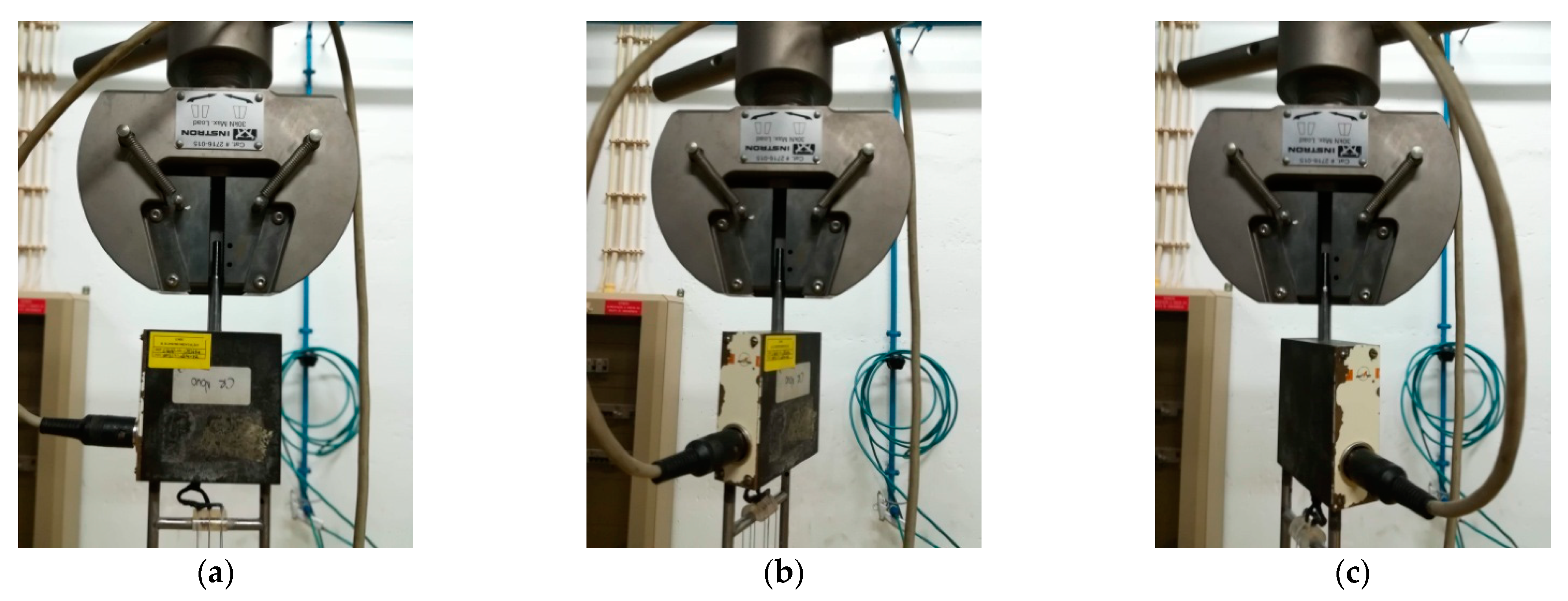
The characterization method proposed for the determination of the conductance transducers linearity, reversibility, and repeatability consists in the application of vertical unidirectional displacement steps to the tested transducer, which is immersed in water inside a transparent column. The experimental implementation of this method requires the use of a universal testing machine with a displacement range close to 2 m (as shown in
Figure 3), noticing that some of the LNEC’s conductance transducers can have high vertical length.
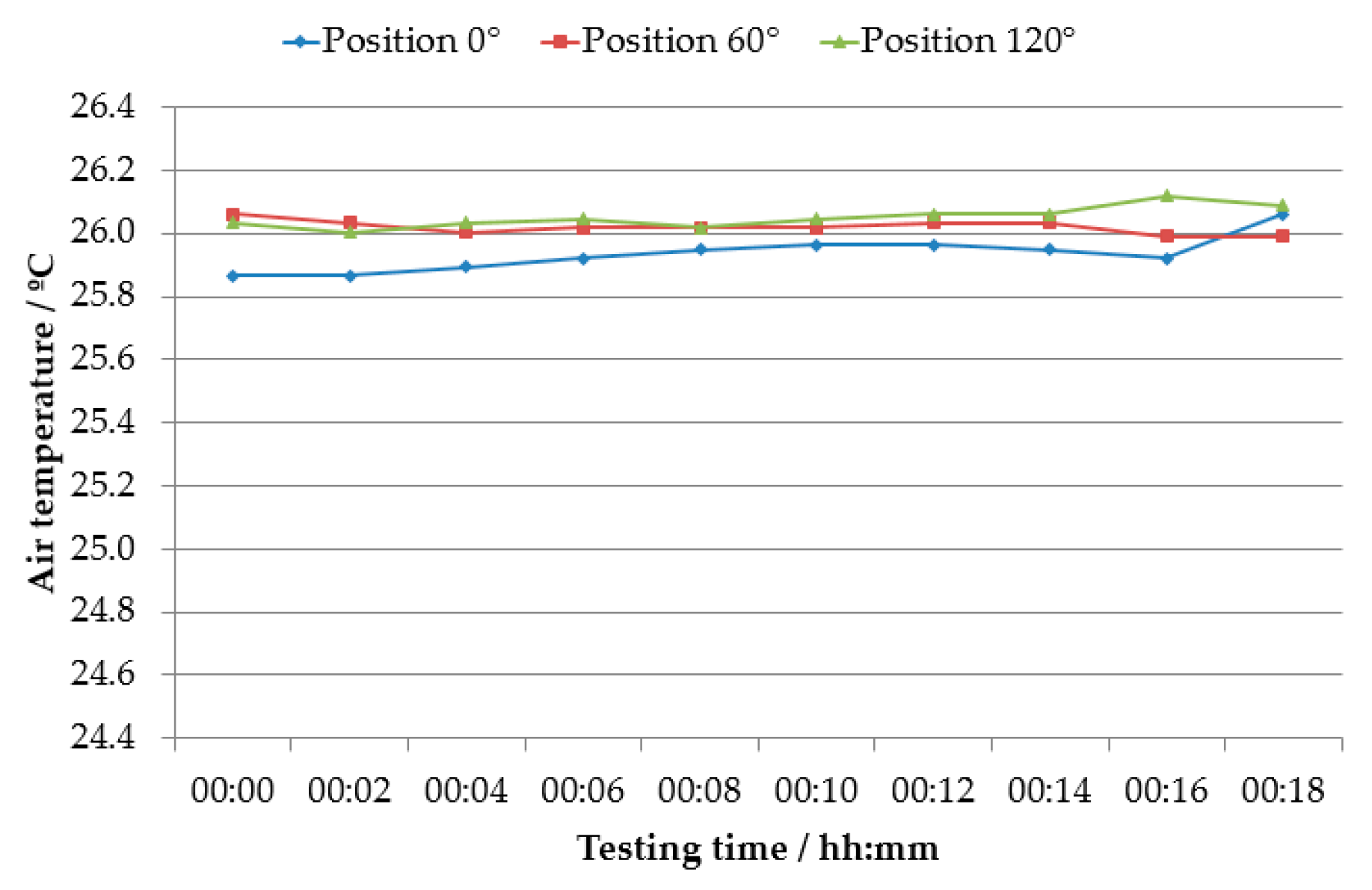
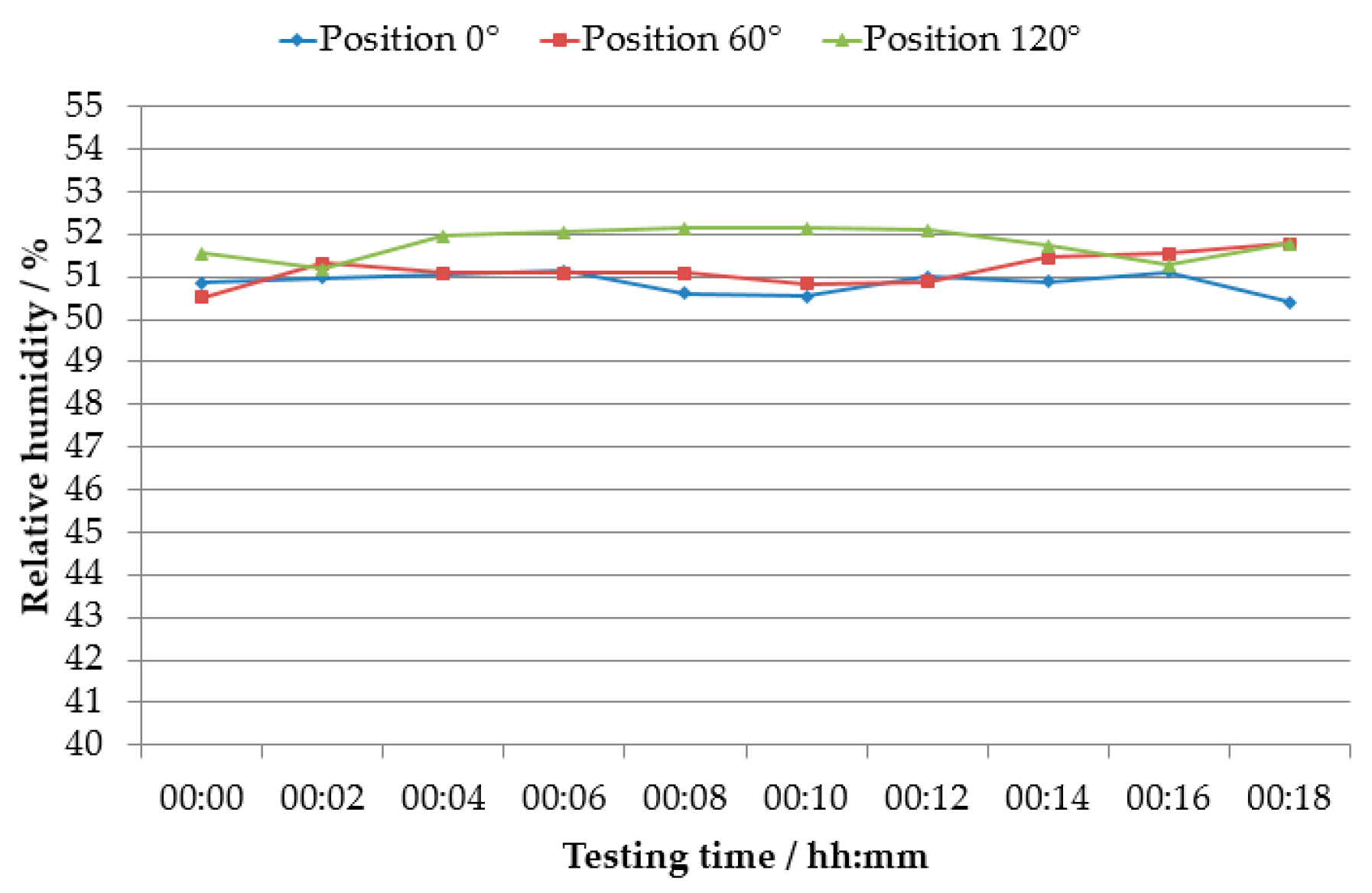
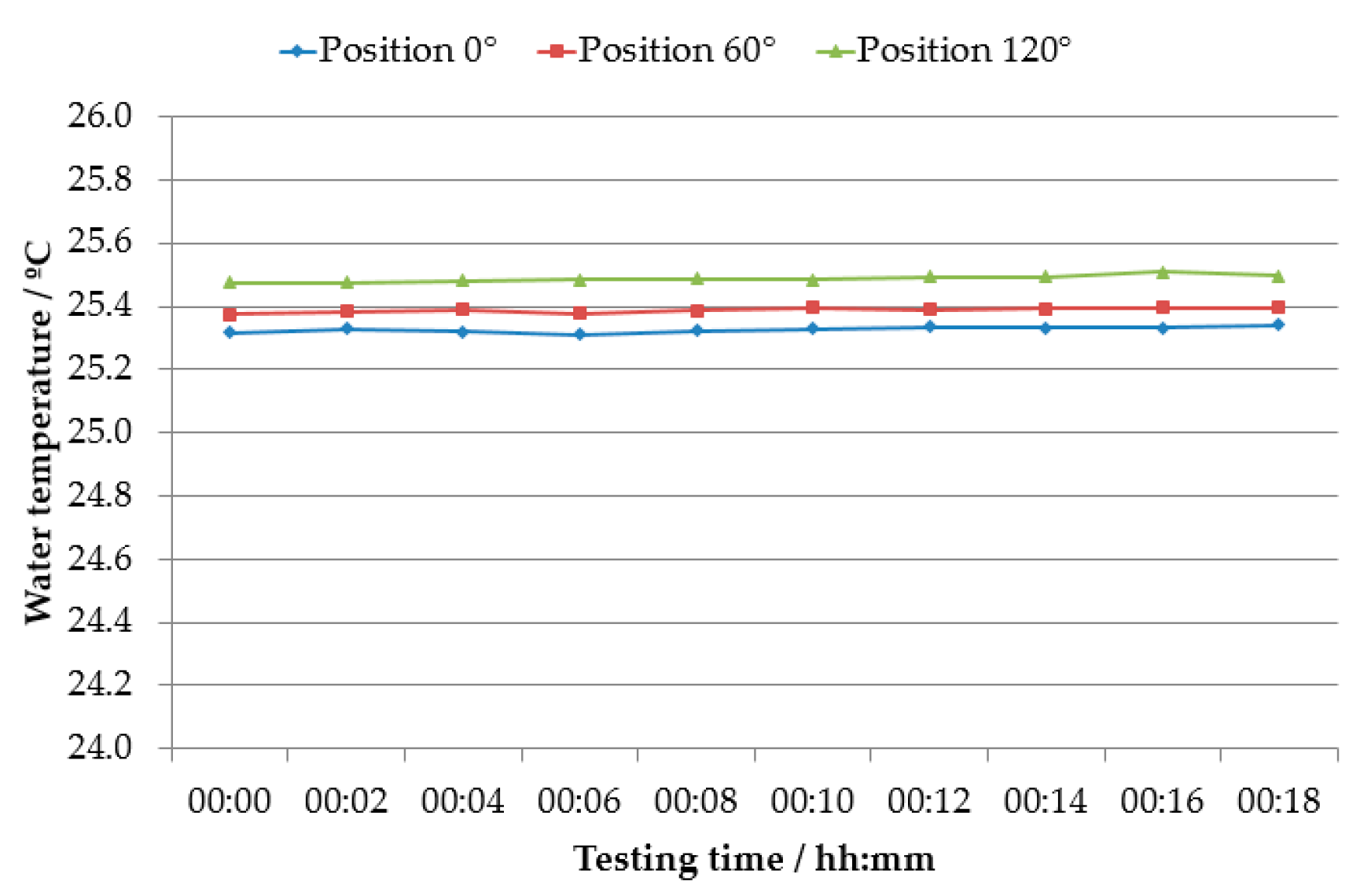
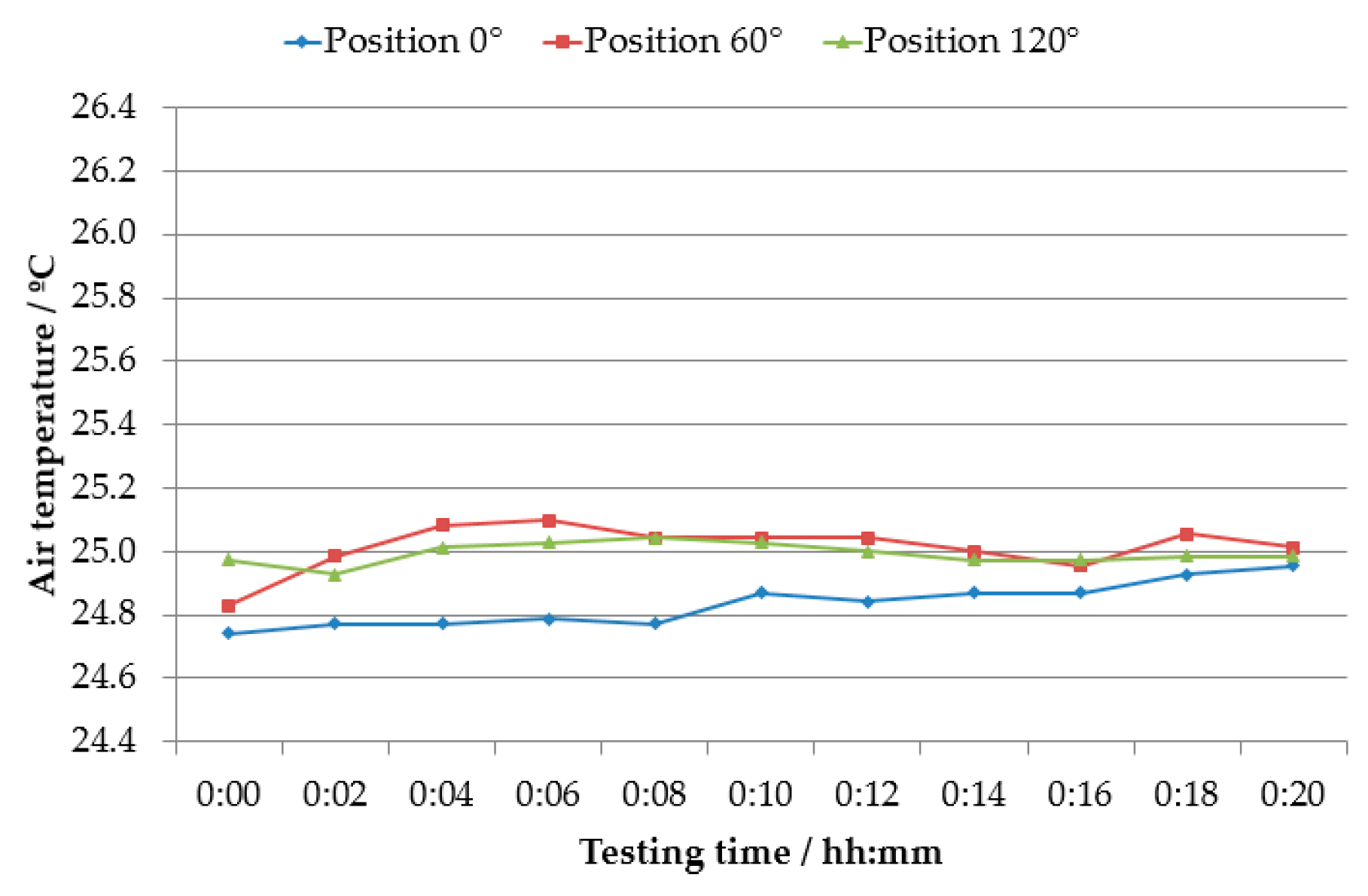
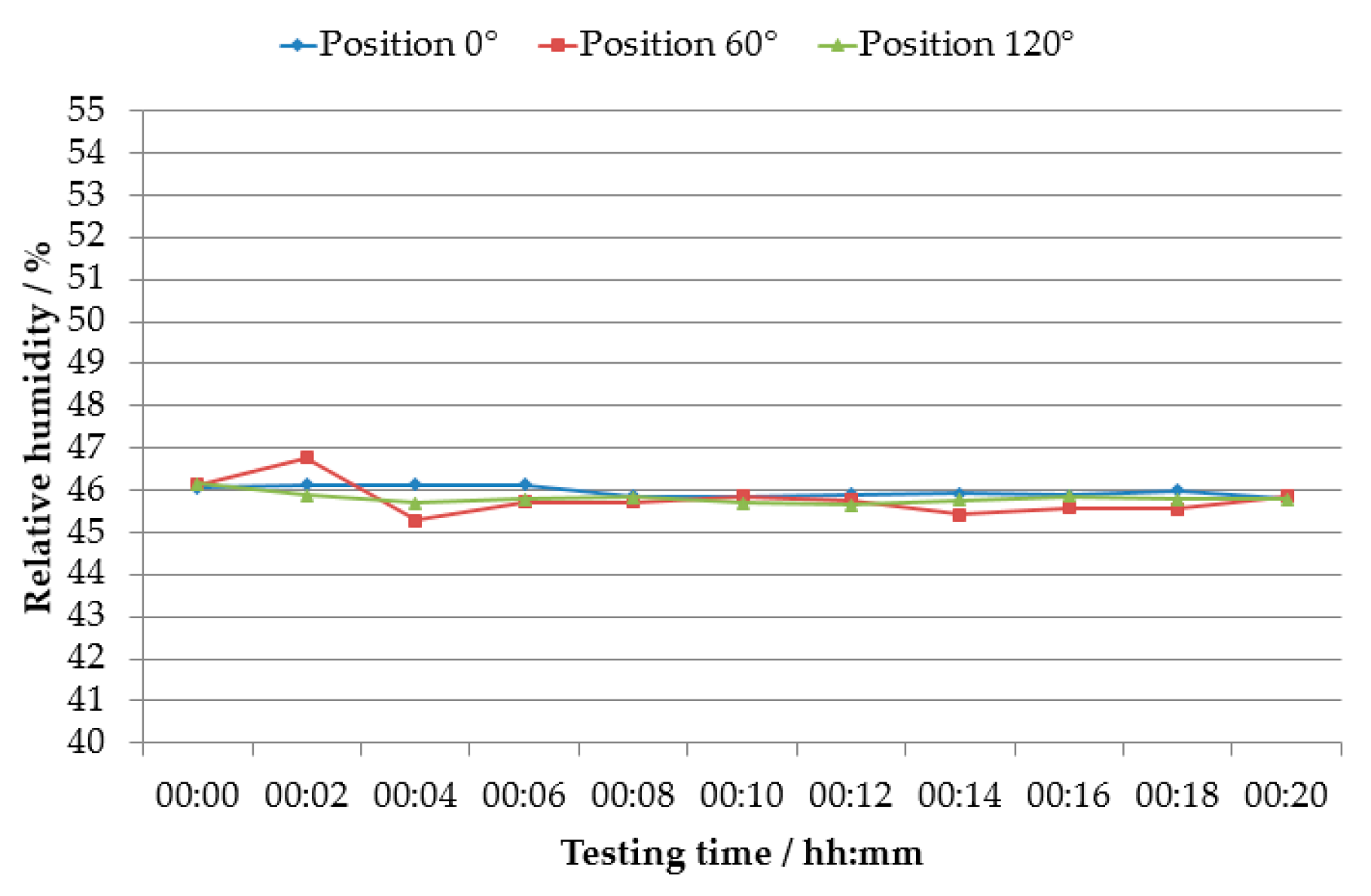
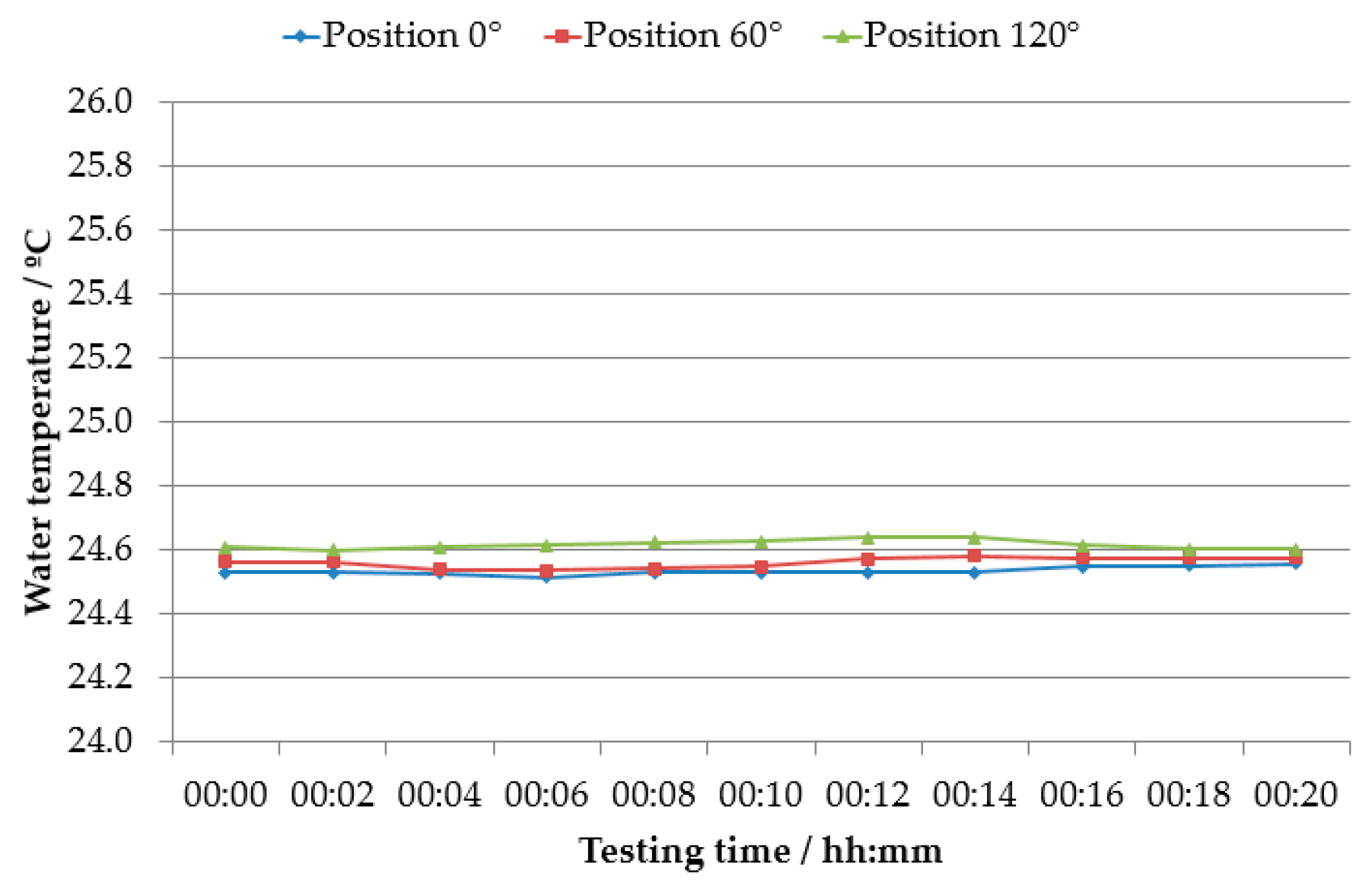
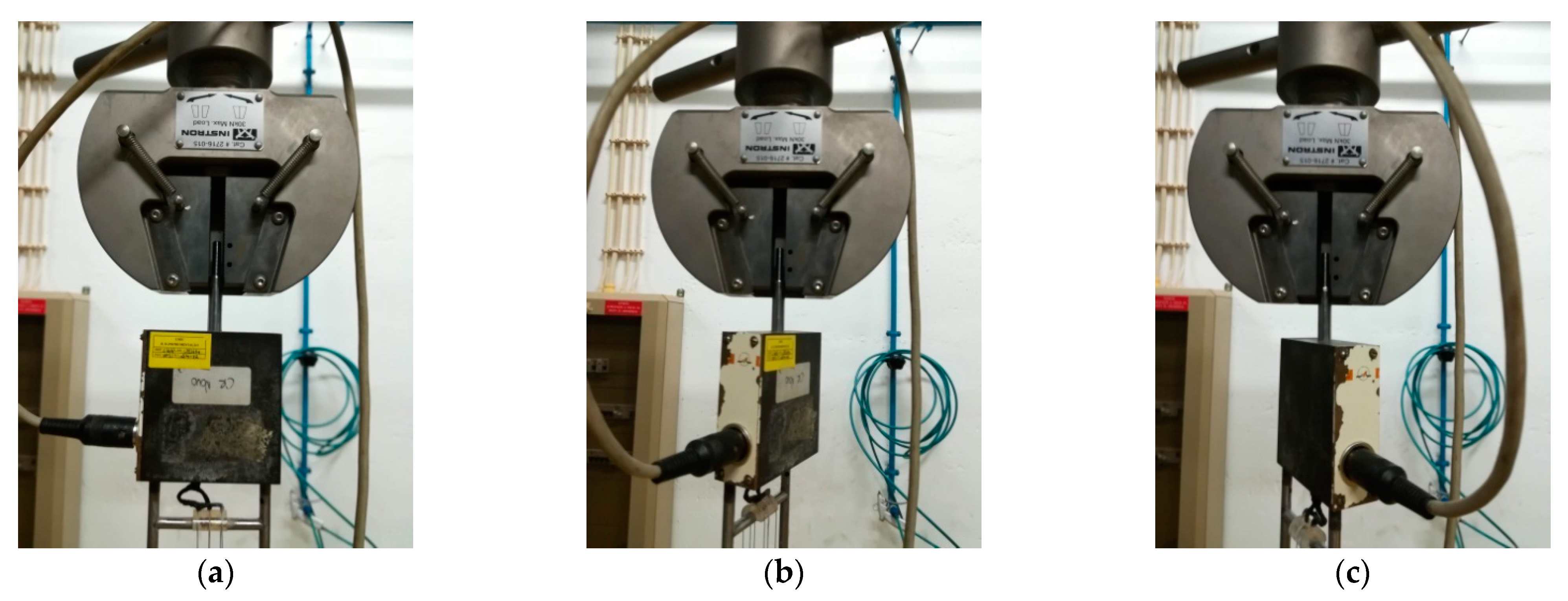
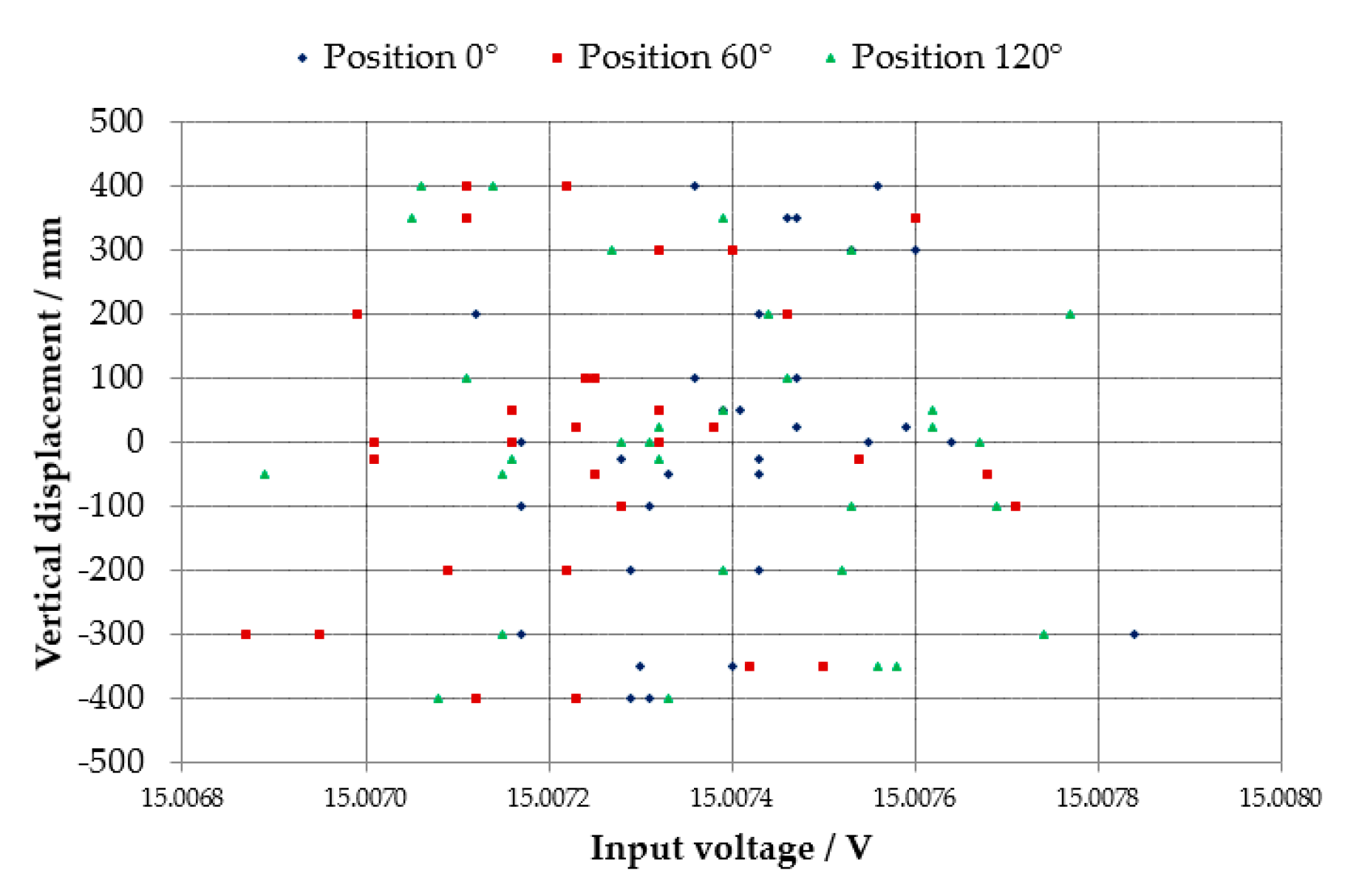
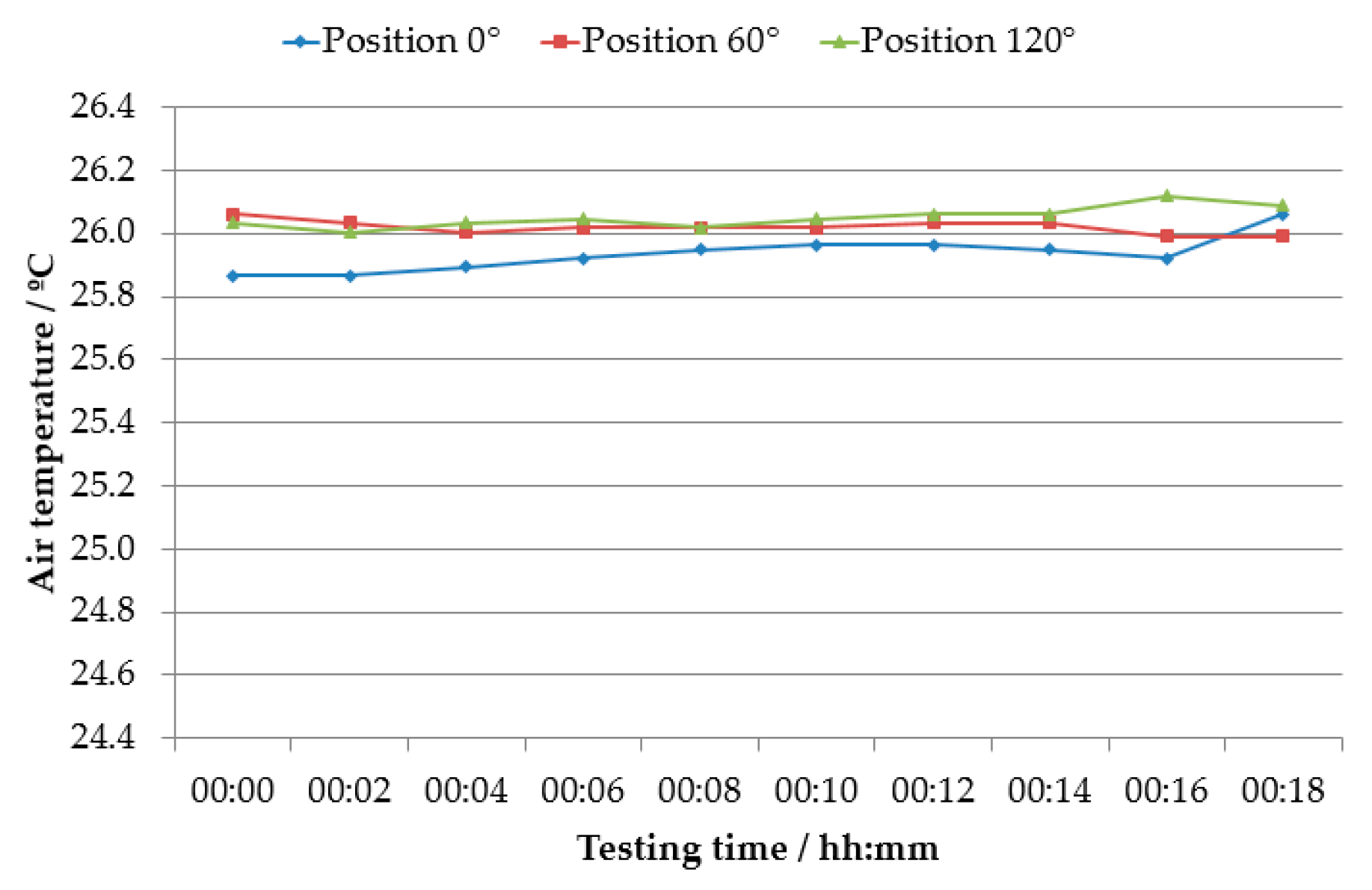
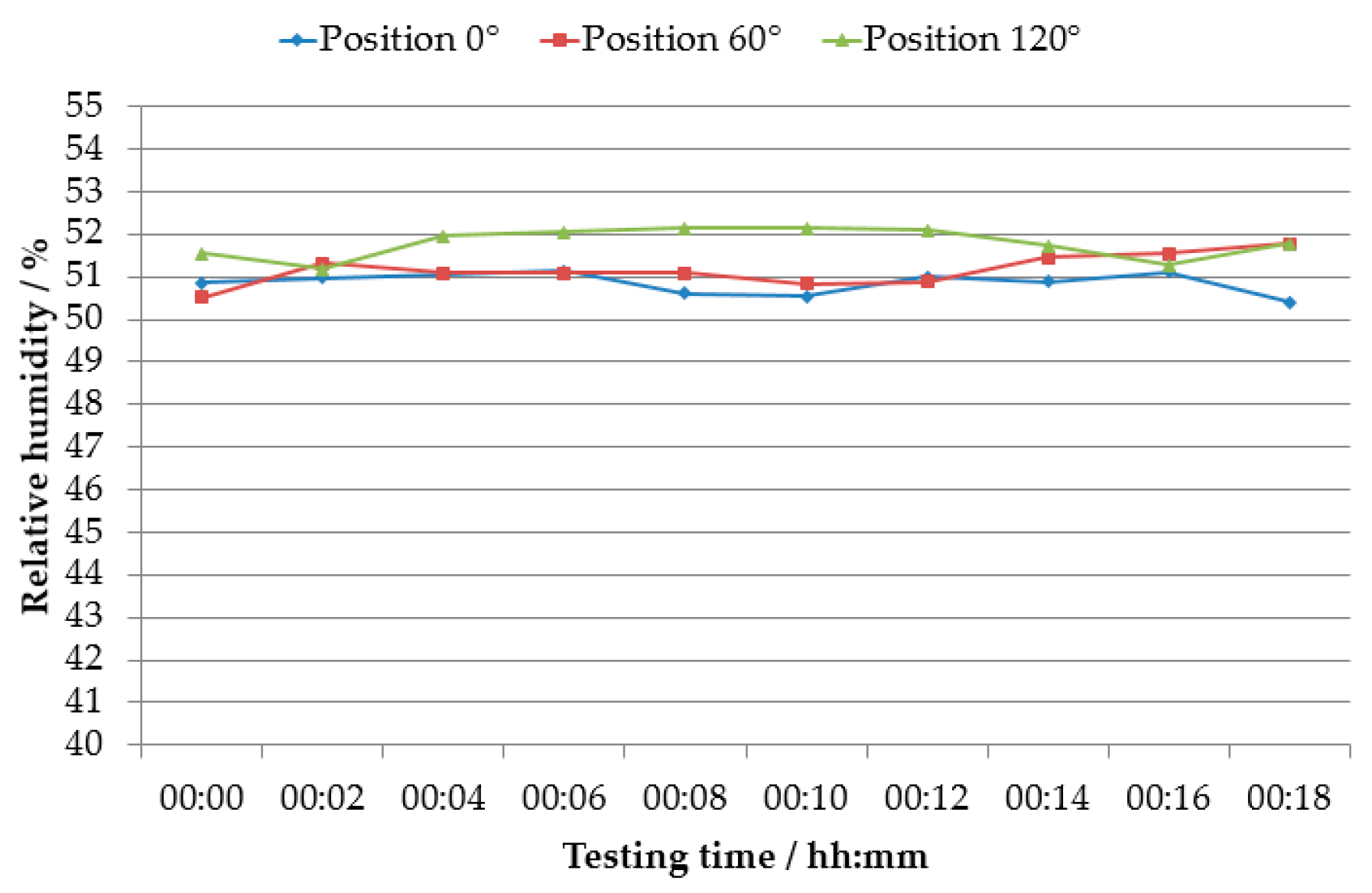
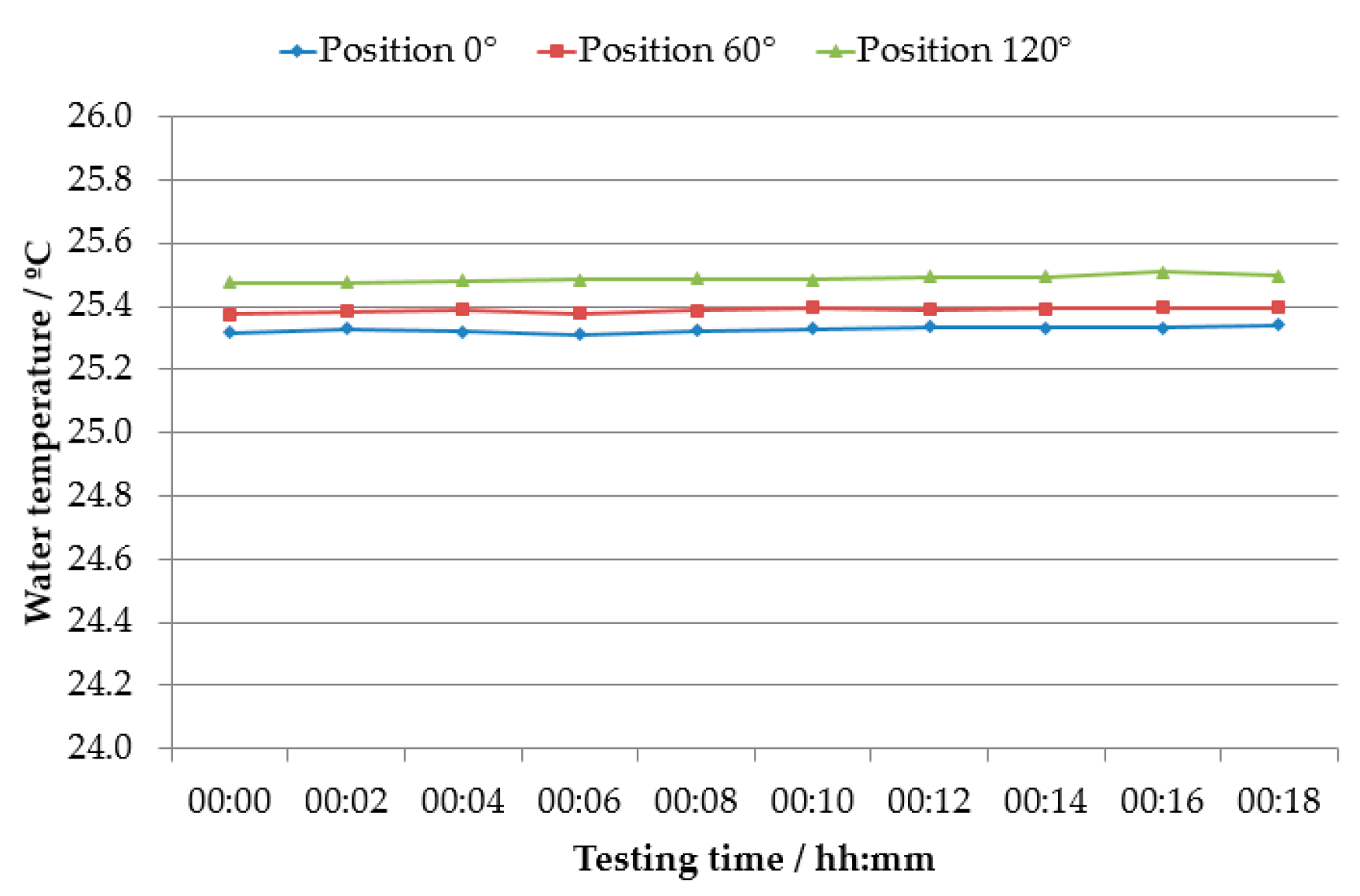
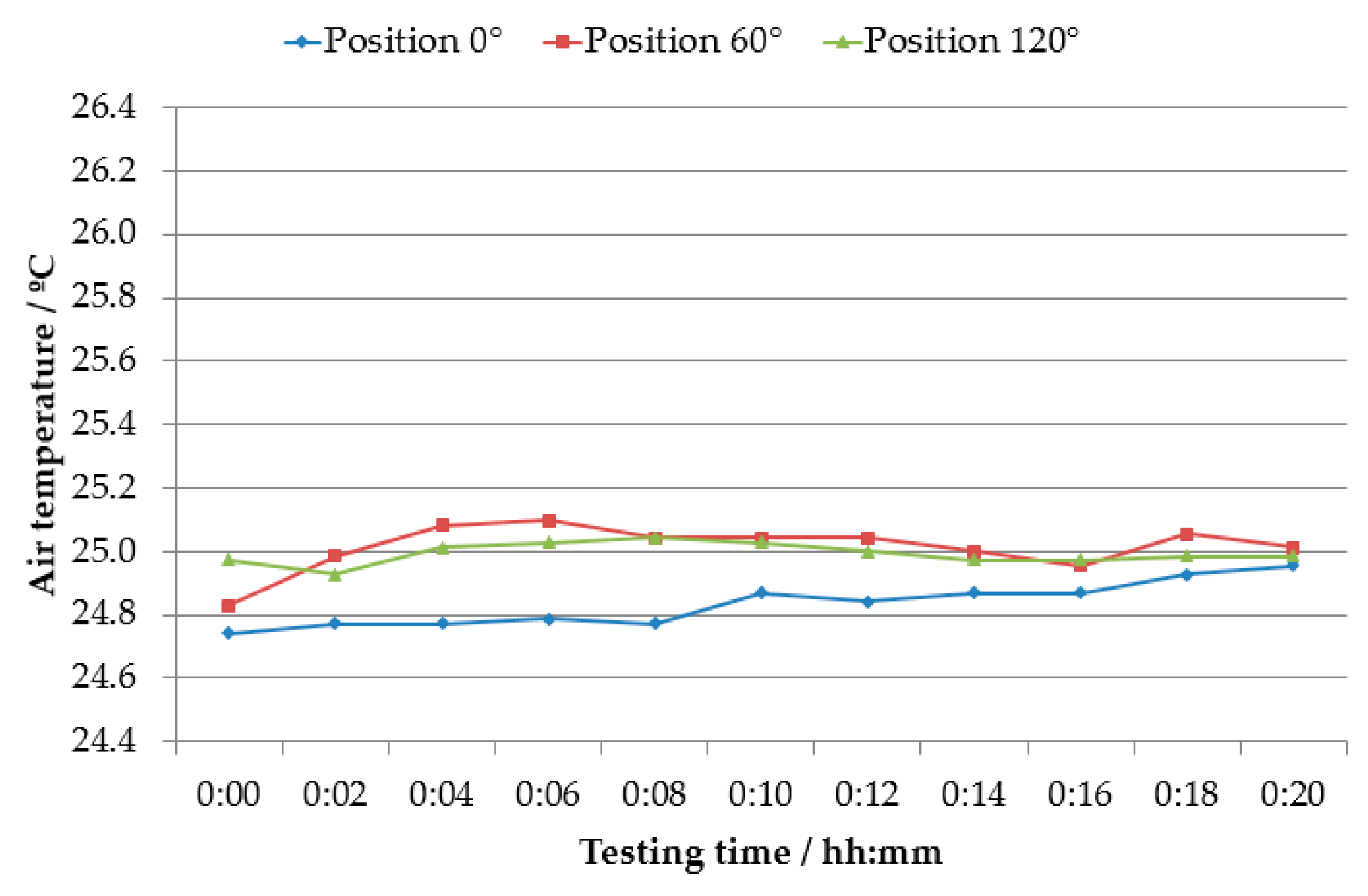
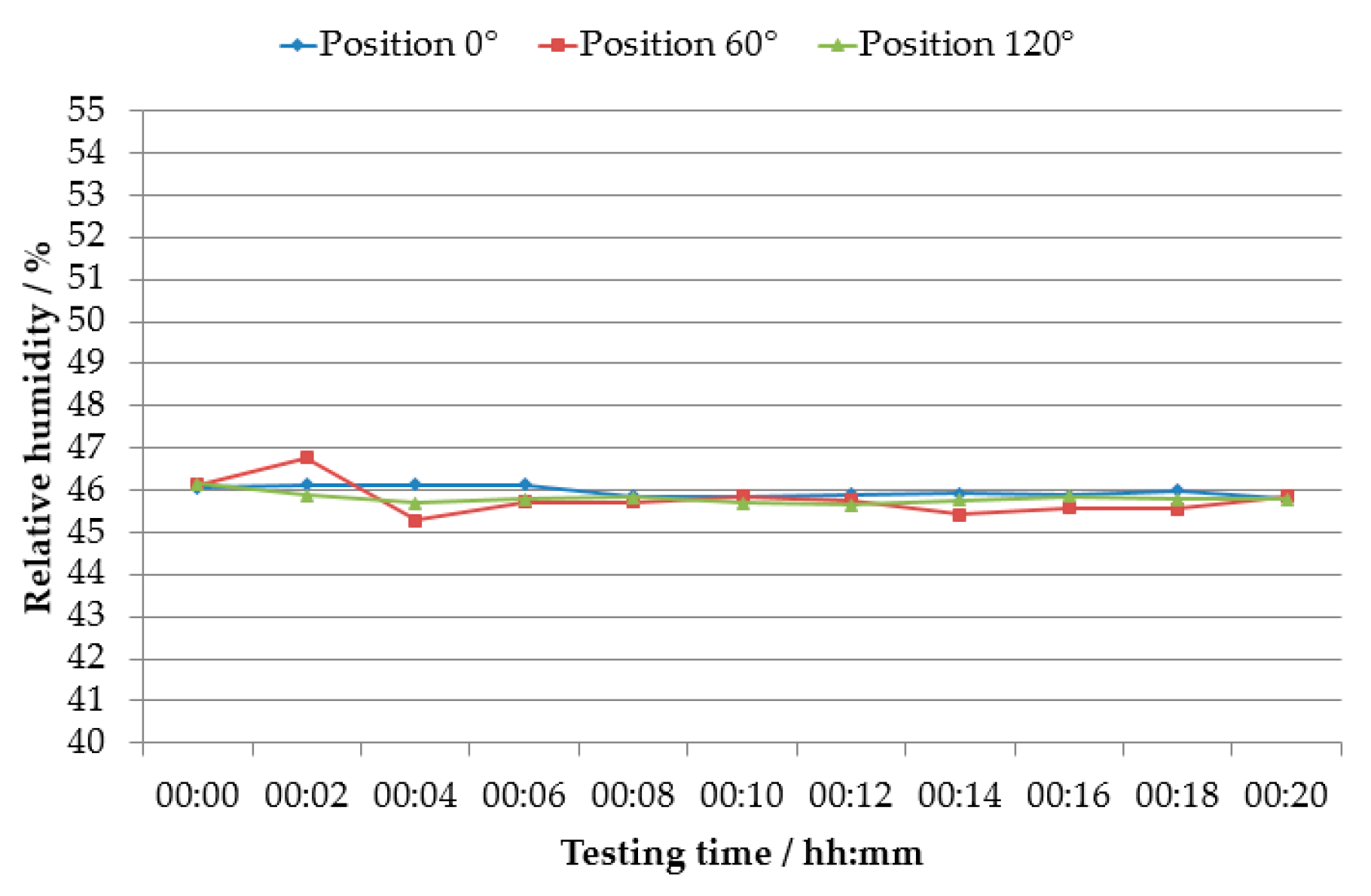
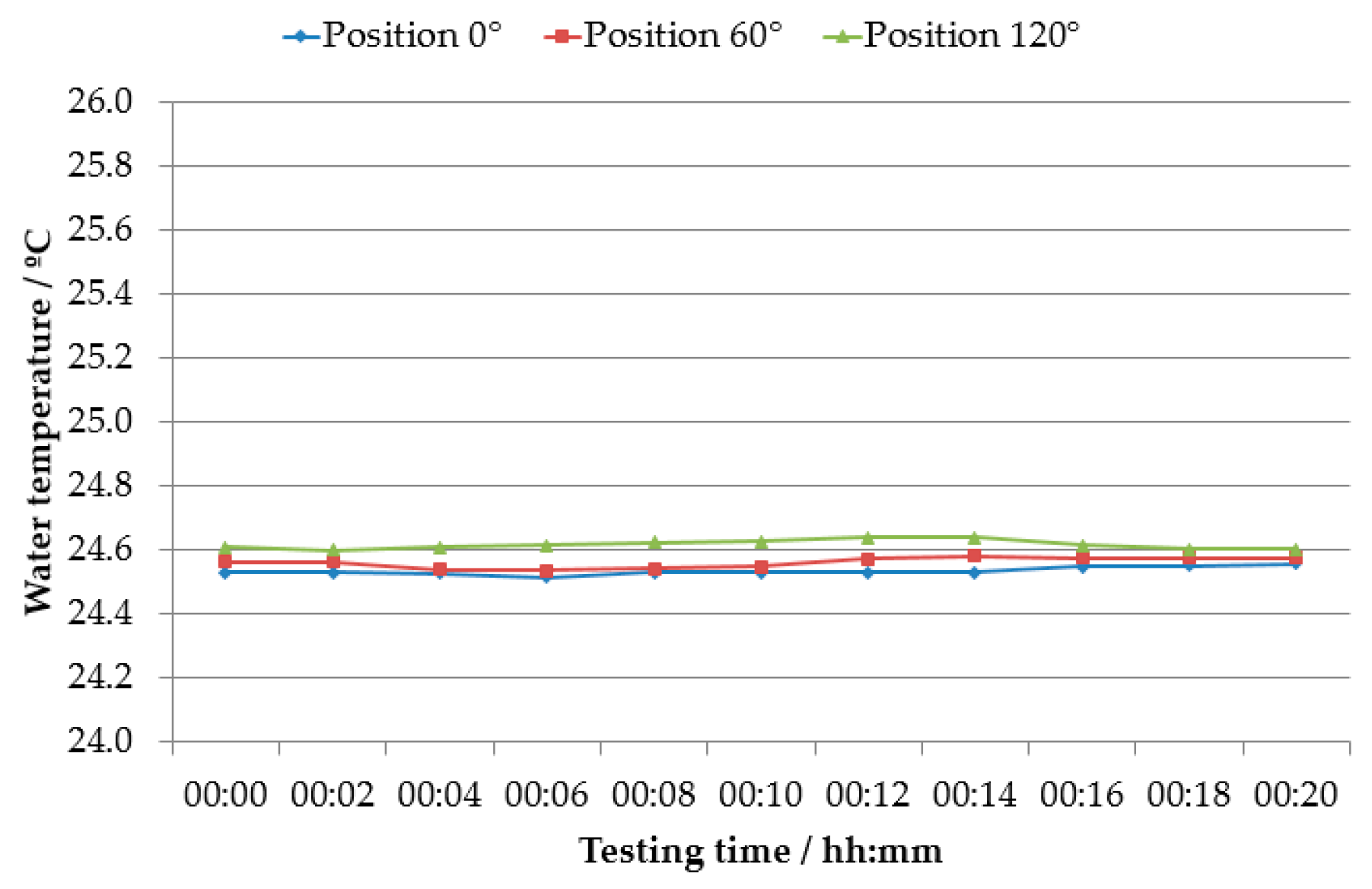
The conductance sensor top end-point can be mechanically fixed to the movable cross head of the testing machine and inserted inside the transparent column, which is installed in the lower region of the load frame. In order to reduce the perpendicularity deviation of the sensor relative to the water surface, namely in the case of high magnitude displacements, the test should be performed three times, applying a rotation of, approximately, 60° relative to the vertical axis between consecutive tests, as shown in
Figure 4.
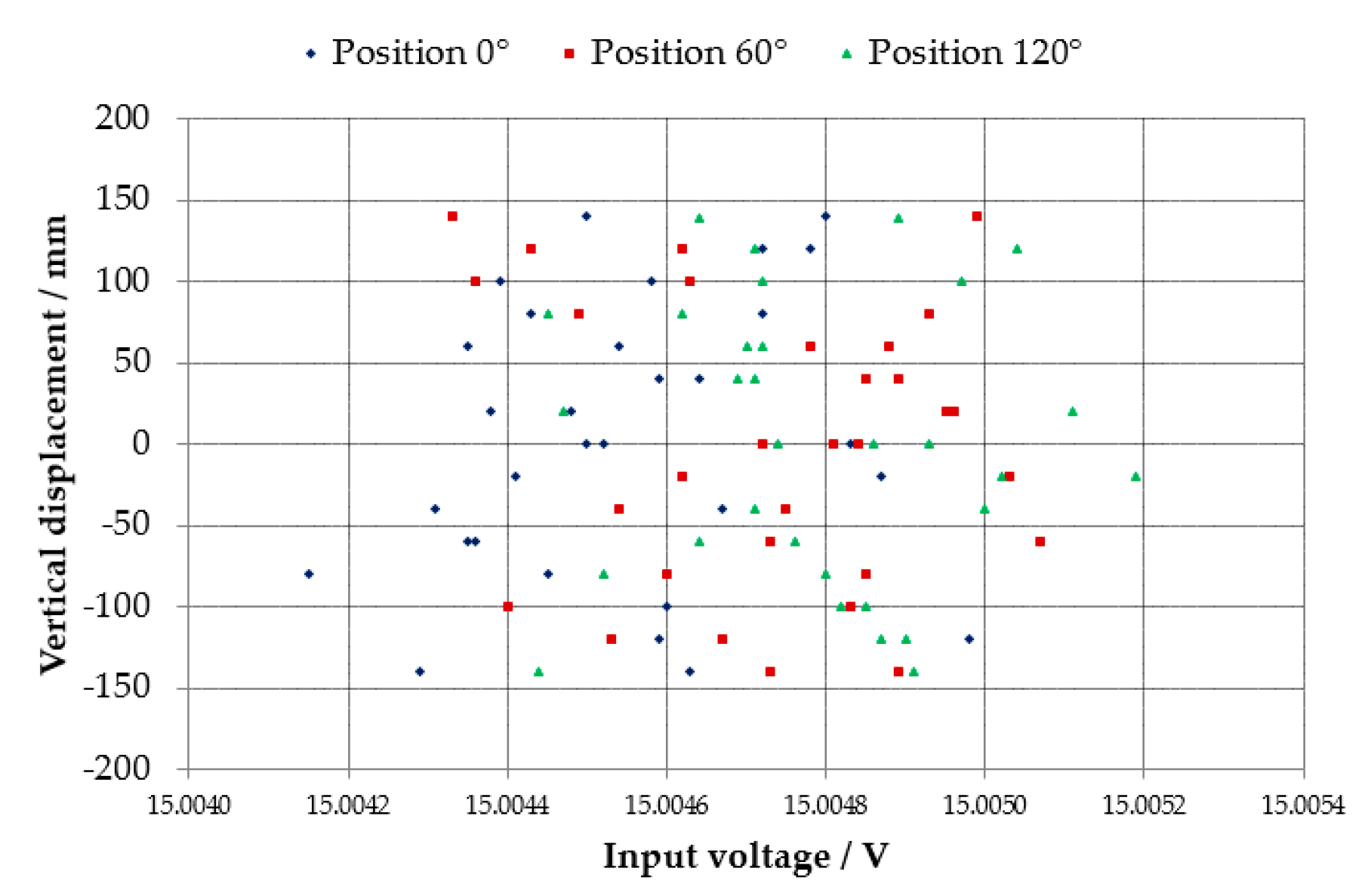
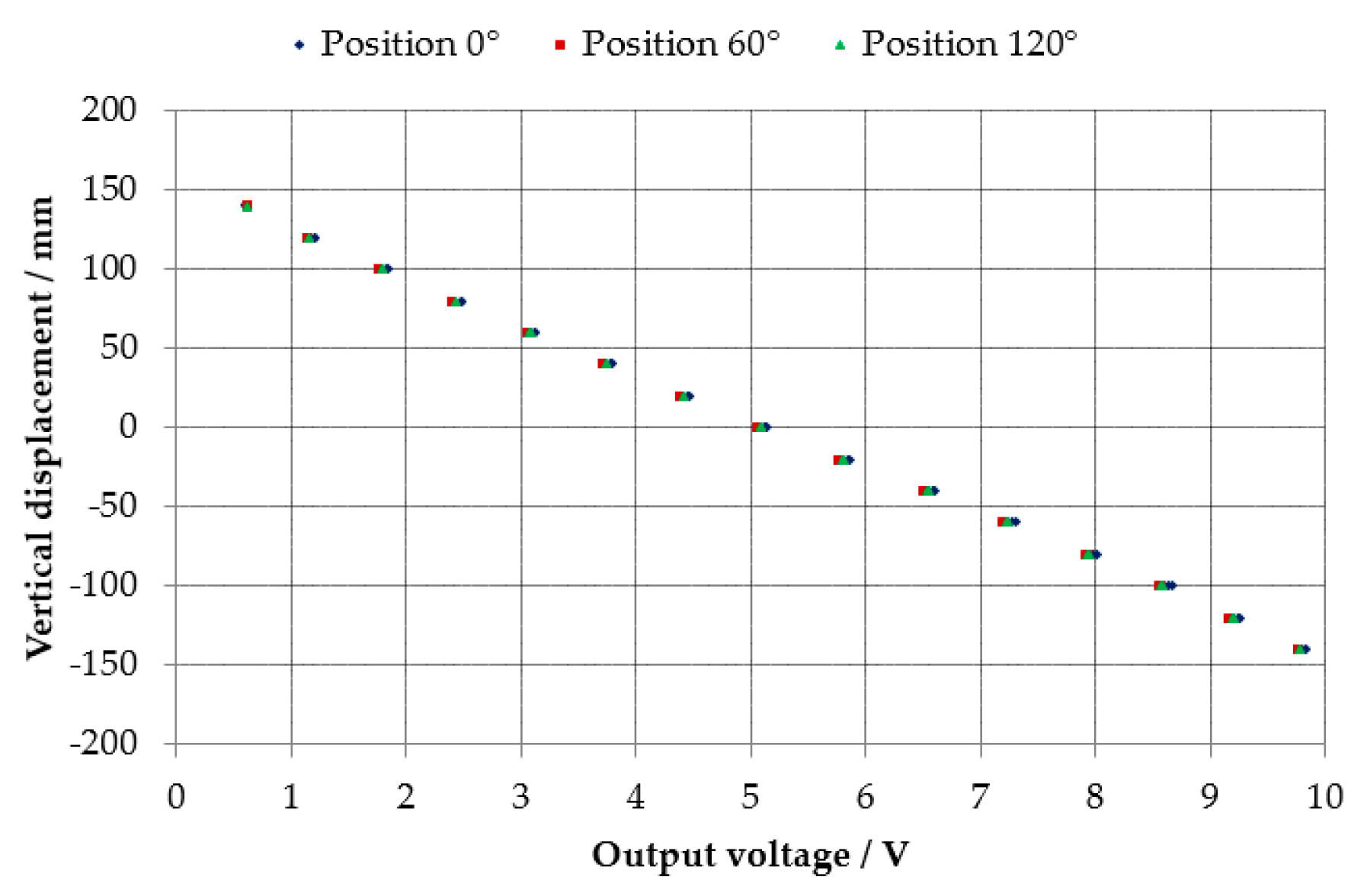
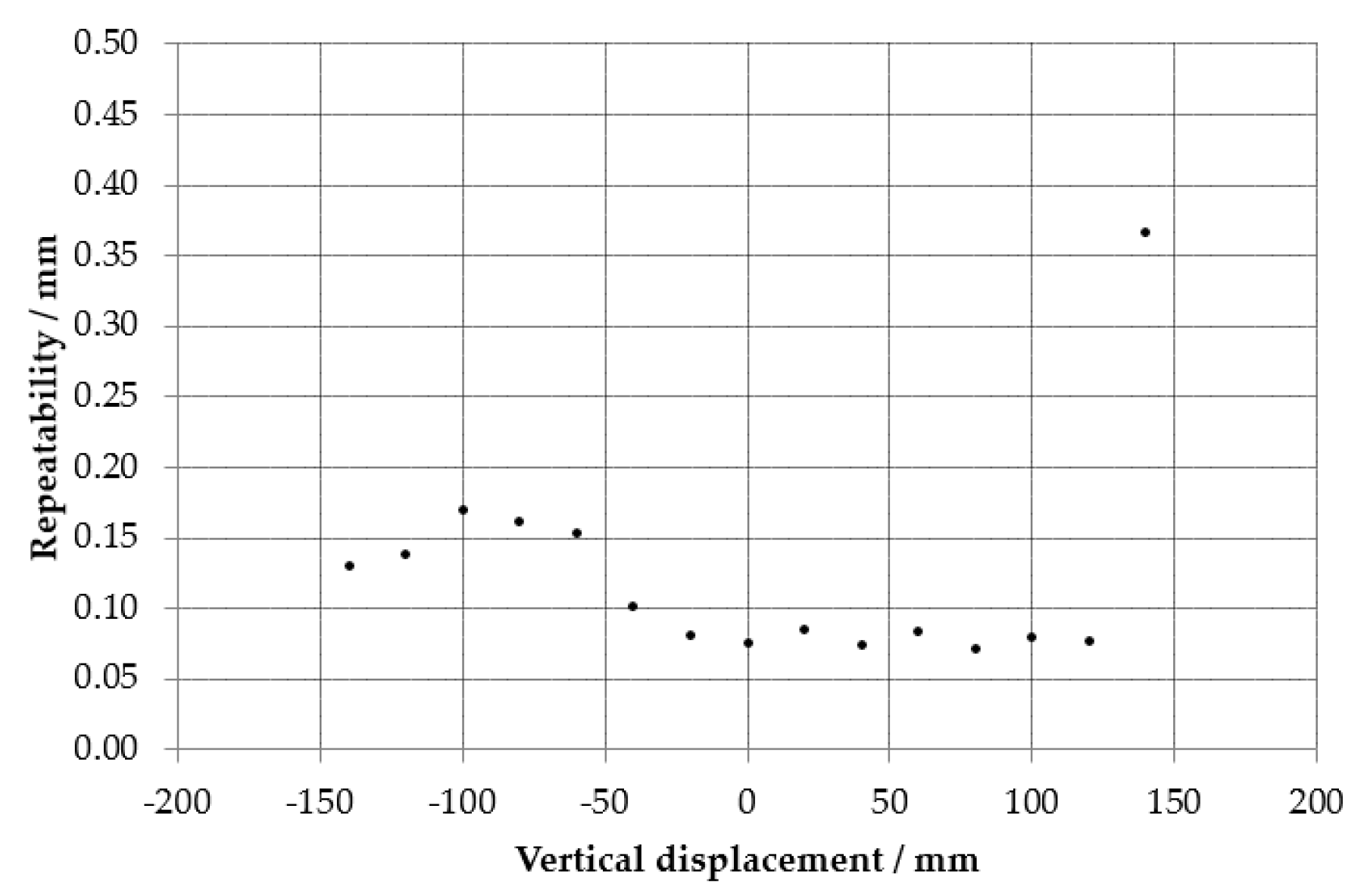
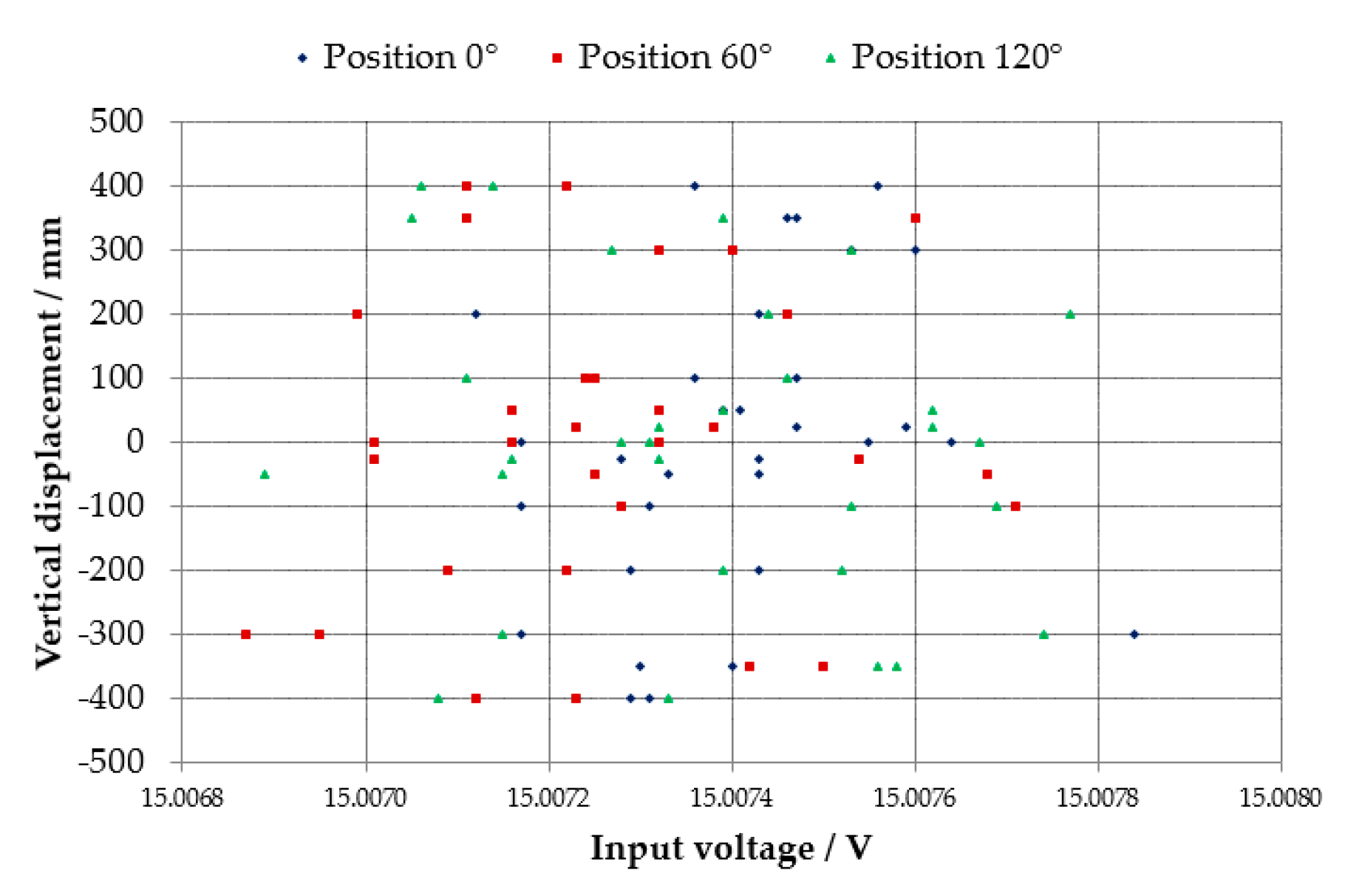
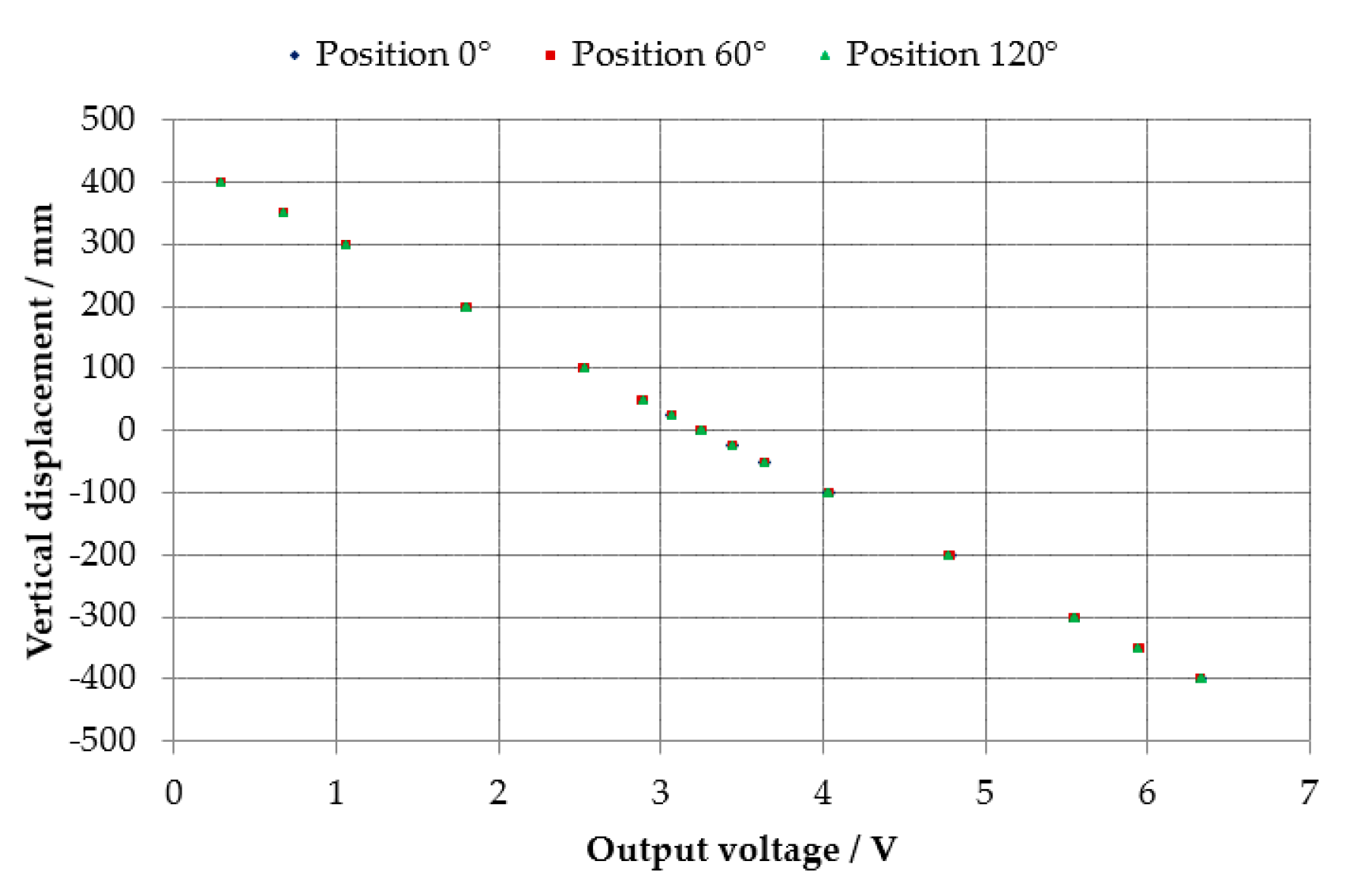
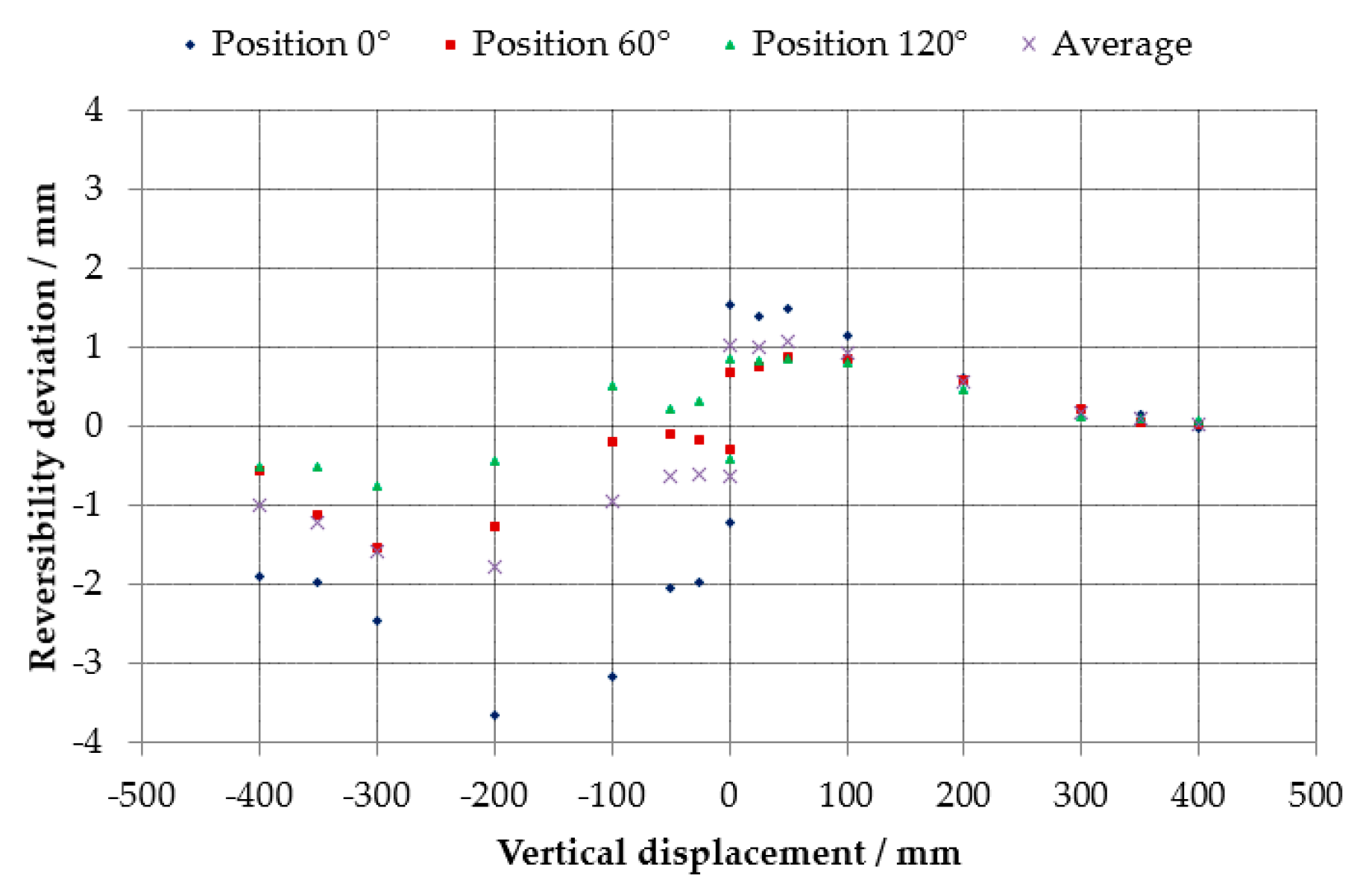
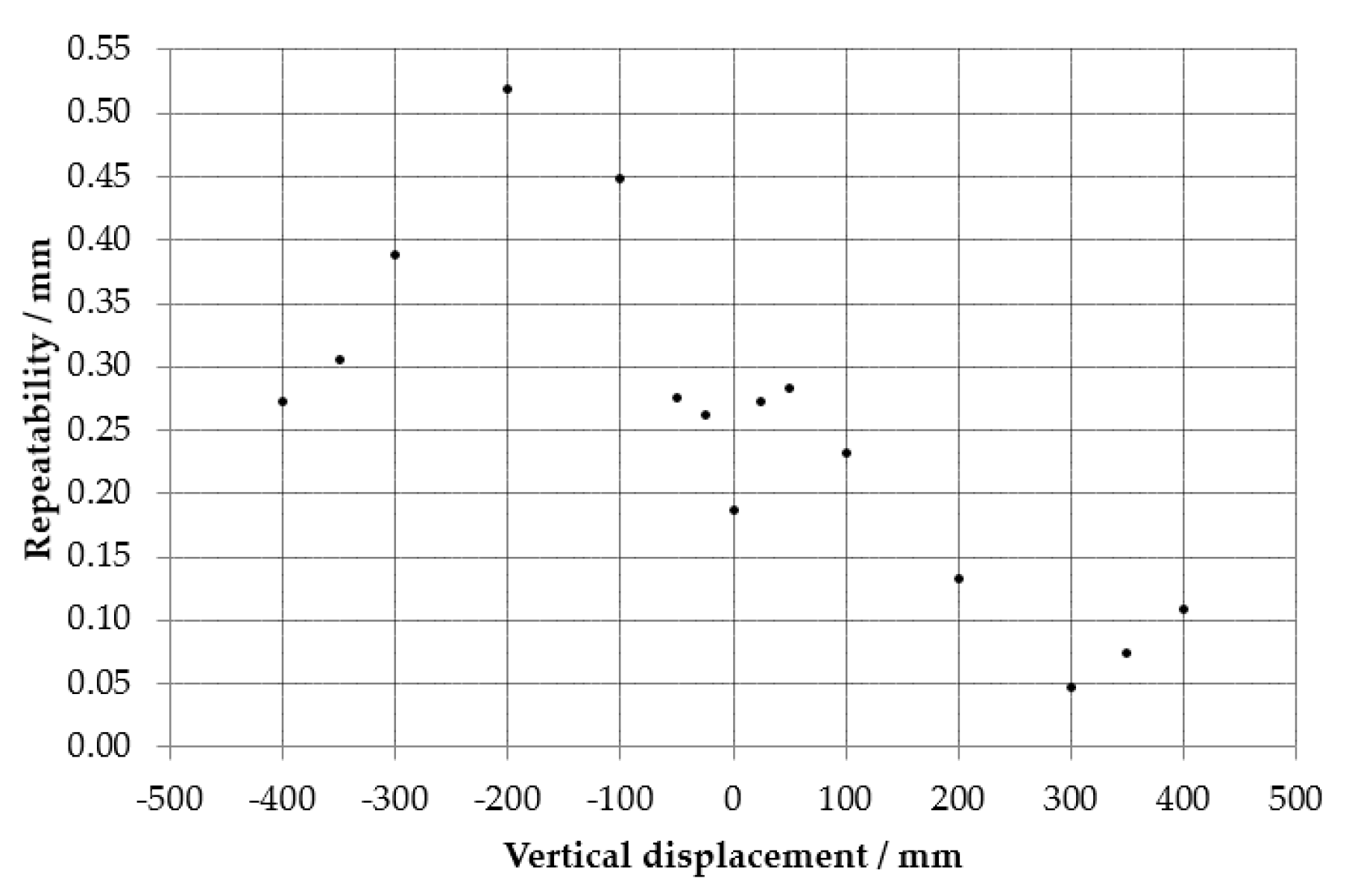
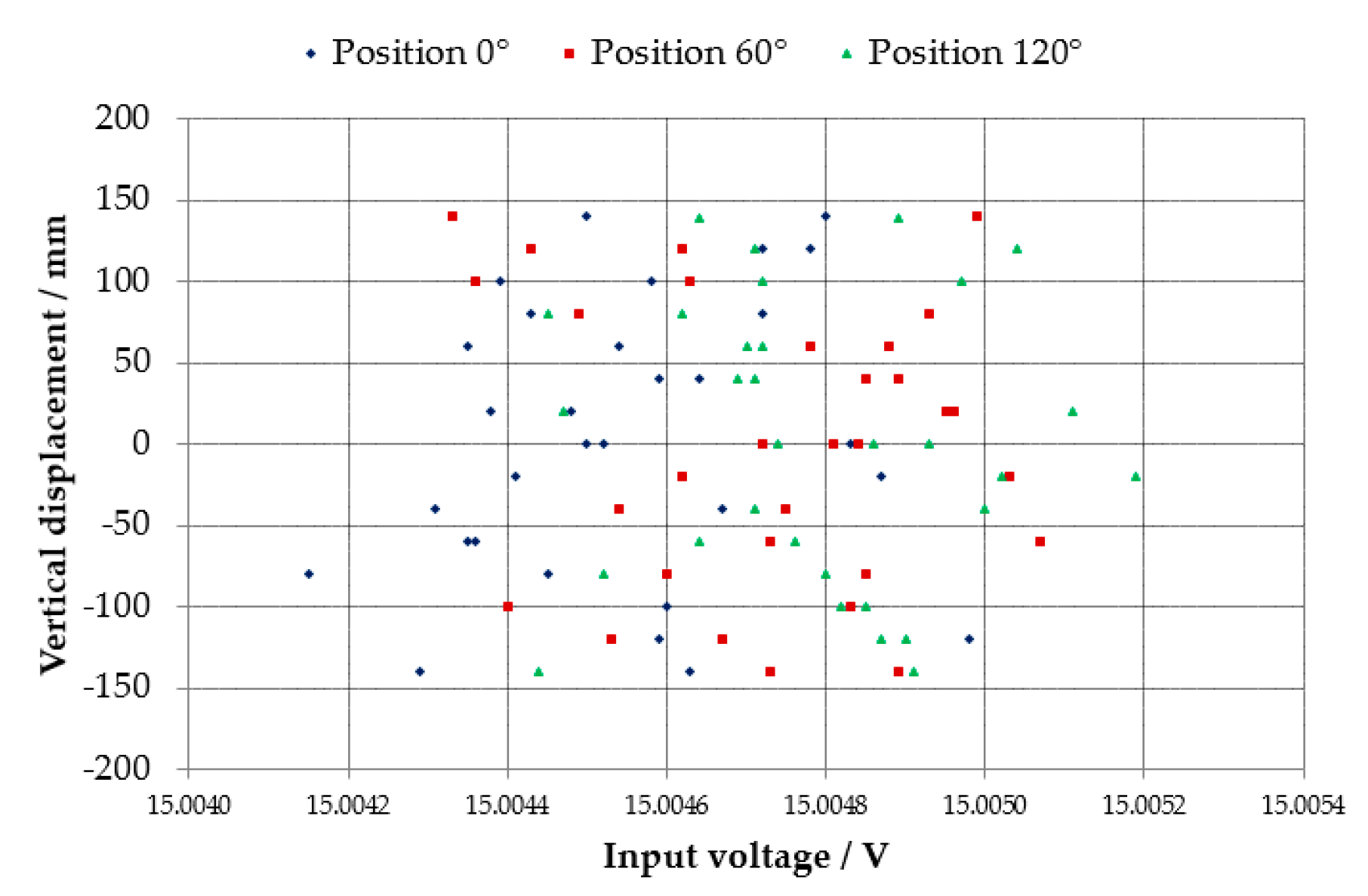
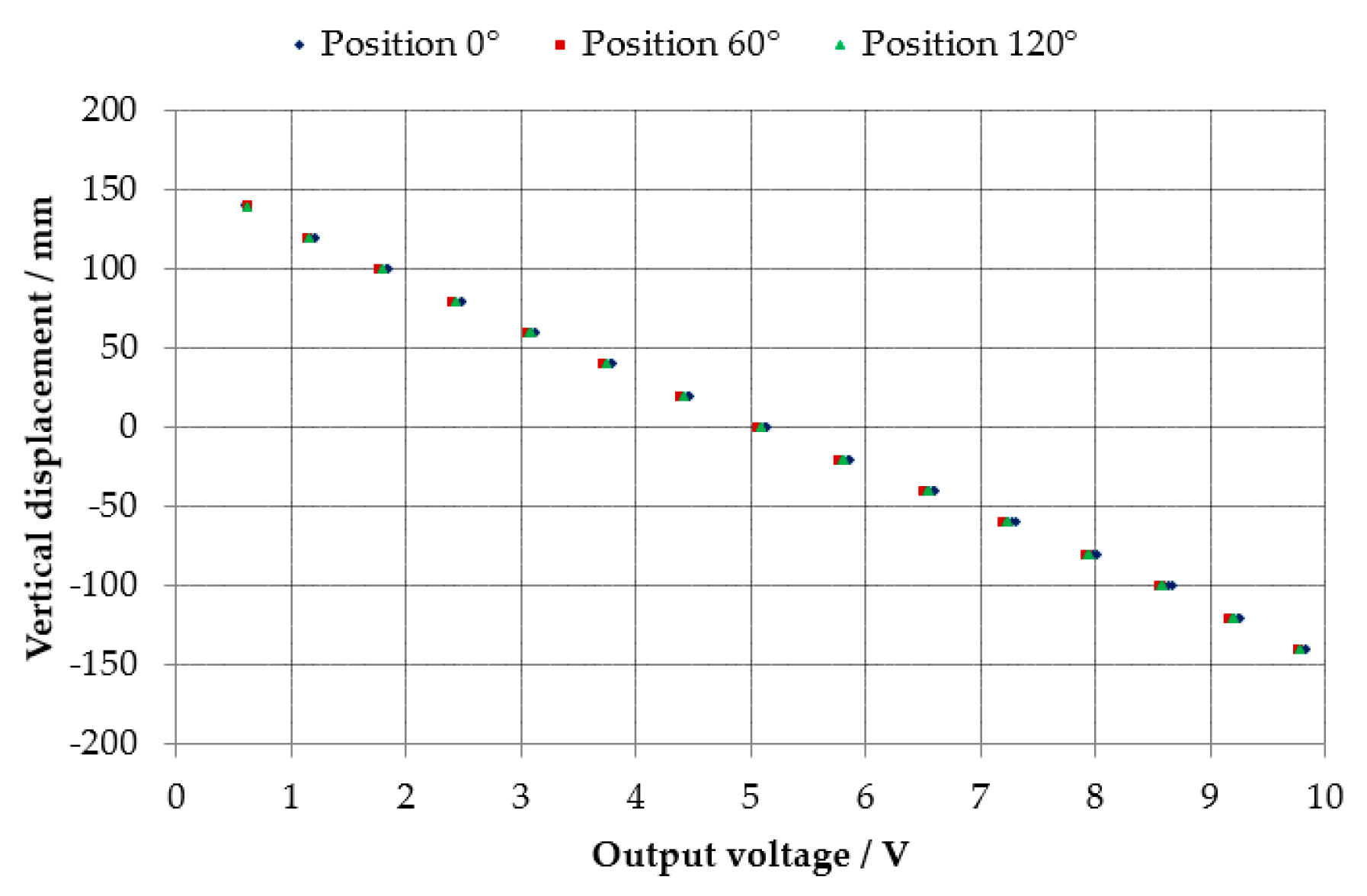
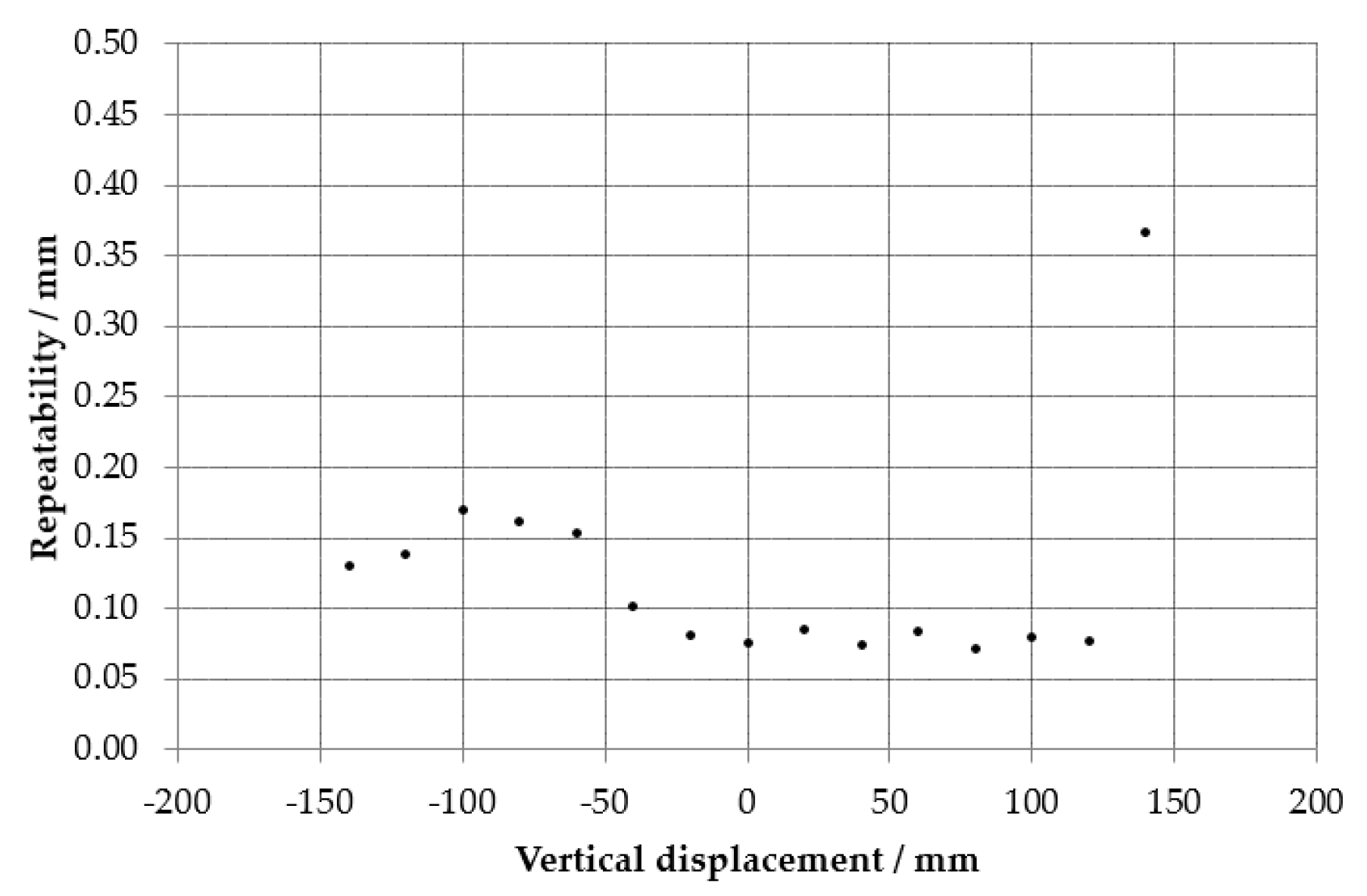
In these tests, the applied displacement to the conductance transducer is assumed as negative in the downward direction, while displacement in the upward direction is considered positive. The first testing step (considered as the zero reference for displacement) corresponds to the half-immersion position of the transducer in the water. In addition to this initial setting, a total of 30 displacement steps equally distributed in the transducer measurement range was applied, considering the following sequence: (i) a downward cycle, starting from the zero position up to the transducer’s upper water level threshold; (ii) an upward cycle, from the transducer’s upper water level threshold to its lower water level threshold, passing by the zero position; (iii) a downward cycle, returning from the lower water level threshold to the zero position.
This characterization method was applied to the two previously mentioned (see
Section 3.1) conductance transducers (with measurement intervals of ±400 mm and ±140 mm) and power supply, regulated for an input voltage equal to 15 V (DC).In each testing step, both the input and the output voltage of the transducer are measured with a digital multimeter (already mentioned in
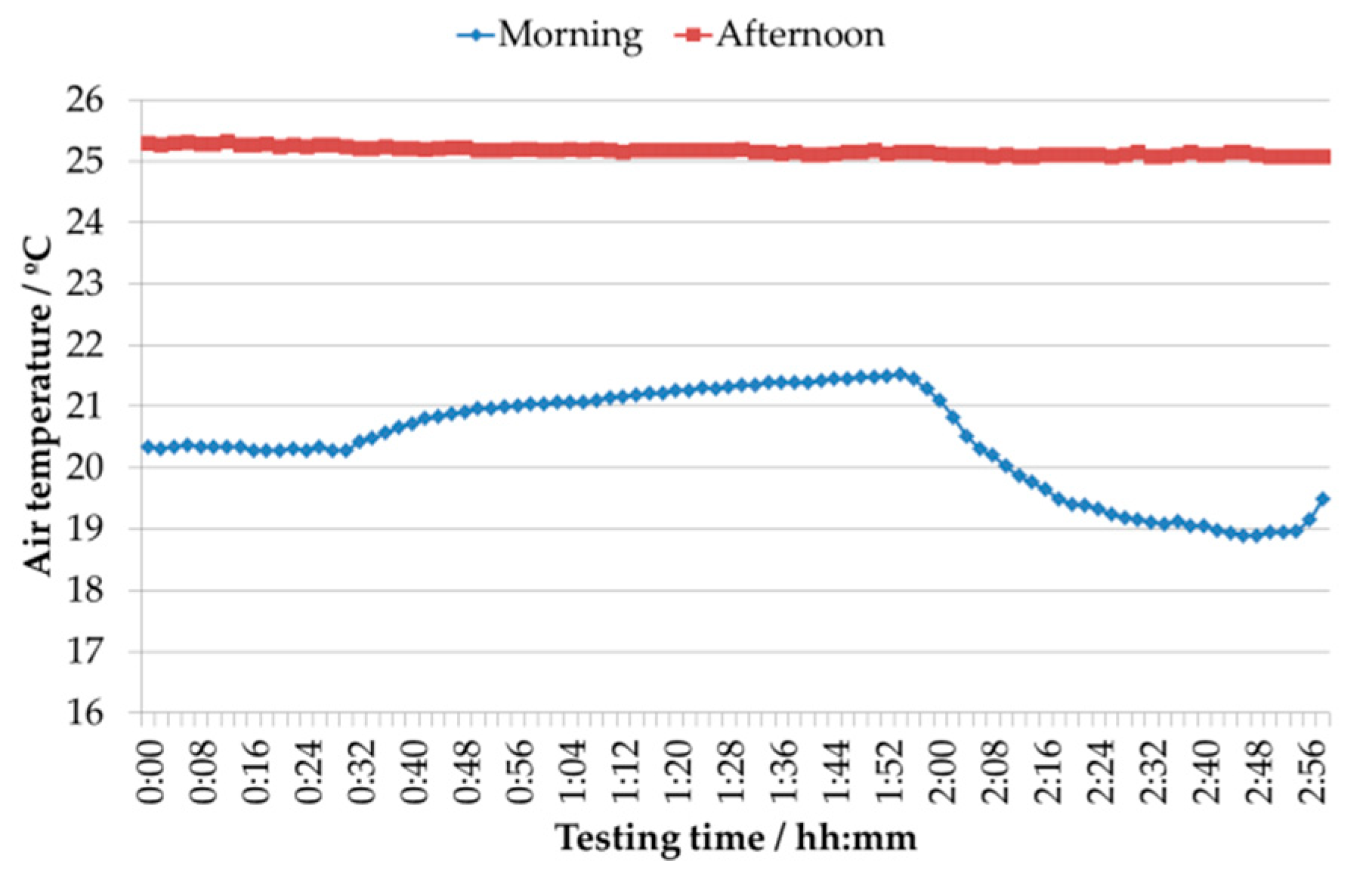
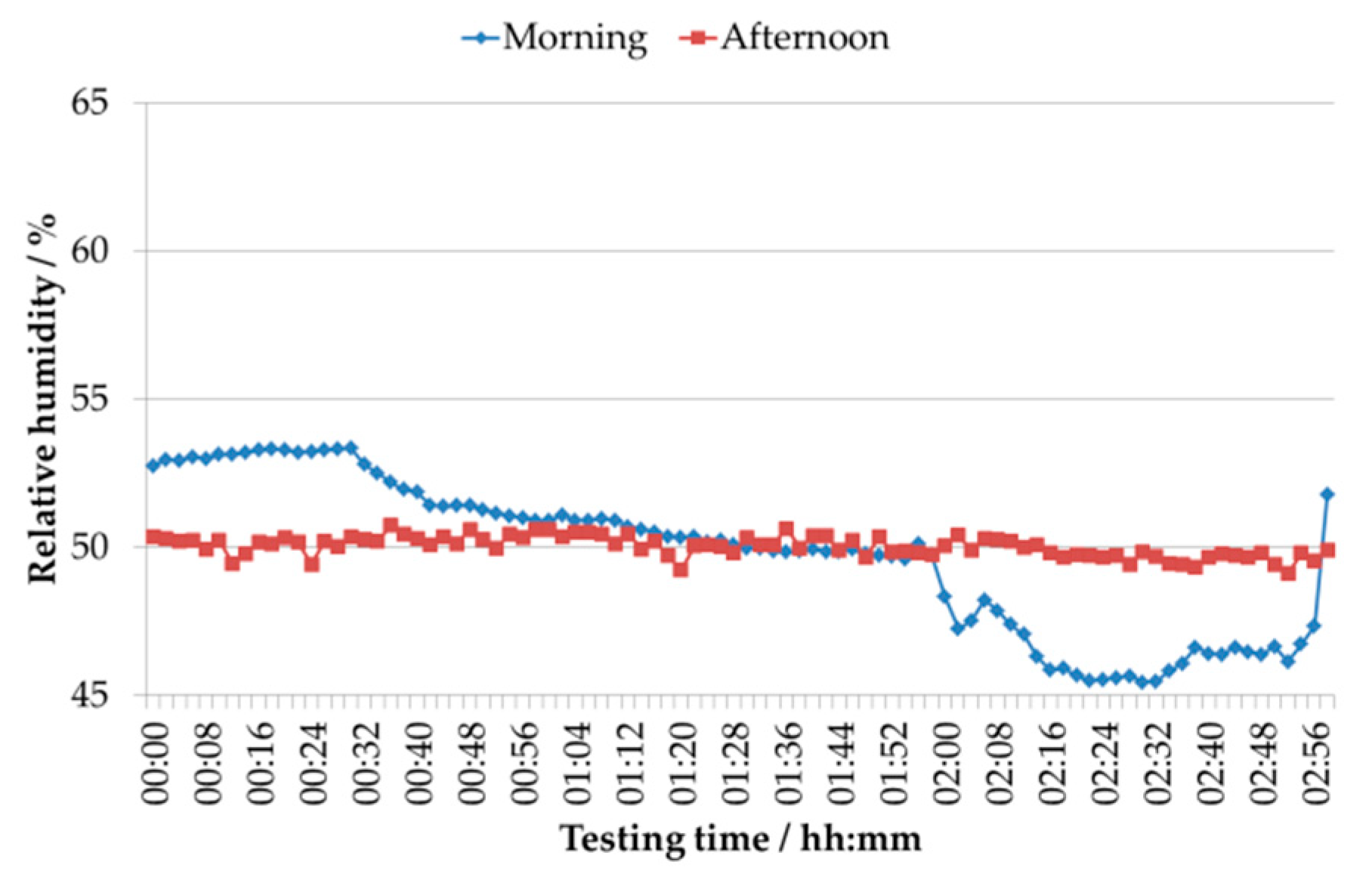
Section 3.1), in addition to the displacement quantity obtained from the dimensional measuring chain of the testing machine (Instron, model 4467). Air temperature and relative humidity and water temperature measurements are performed in a similar way, as mentioned in
Section 3.1.
3.3. Thermal Influence
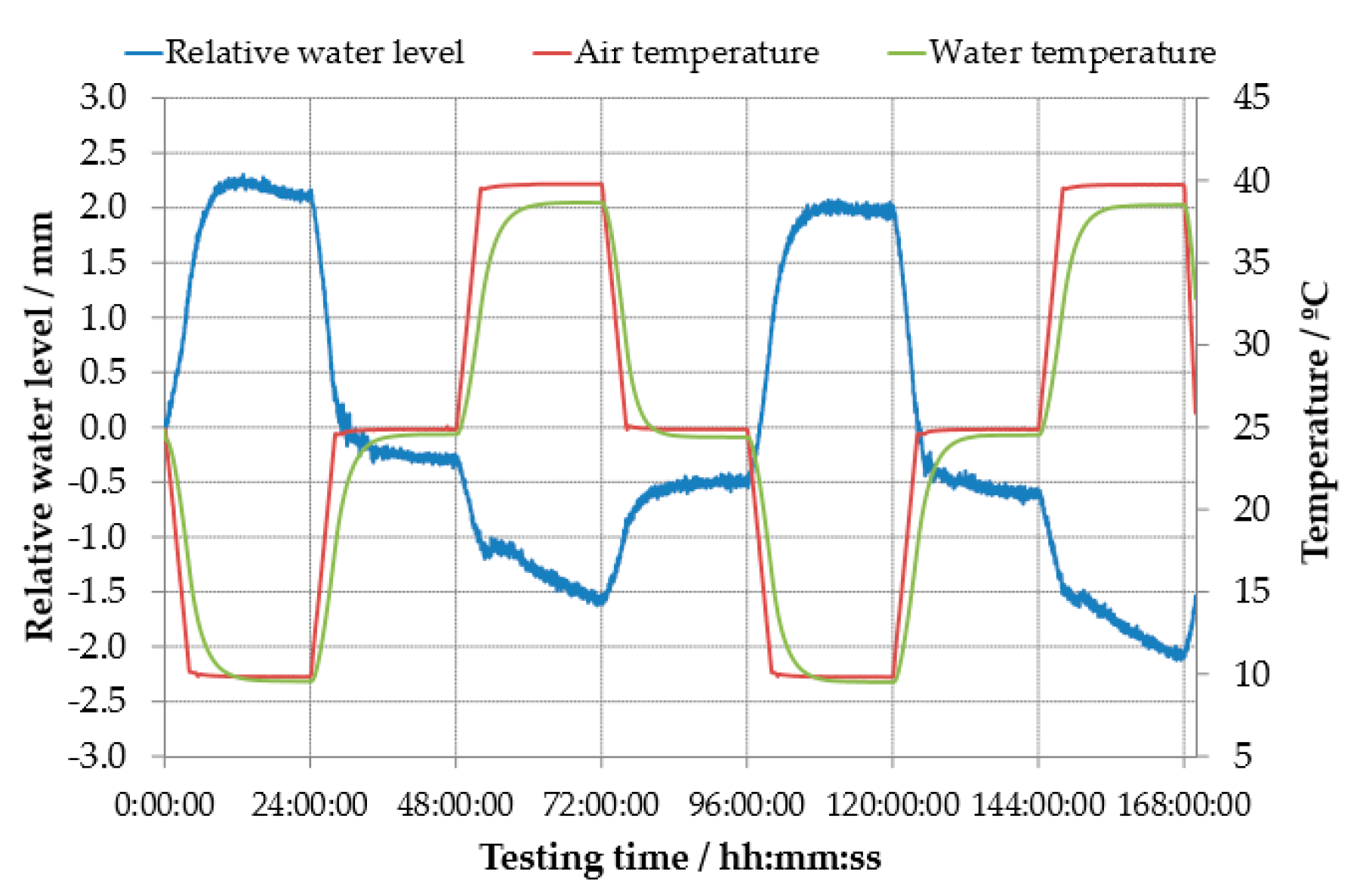
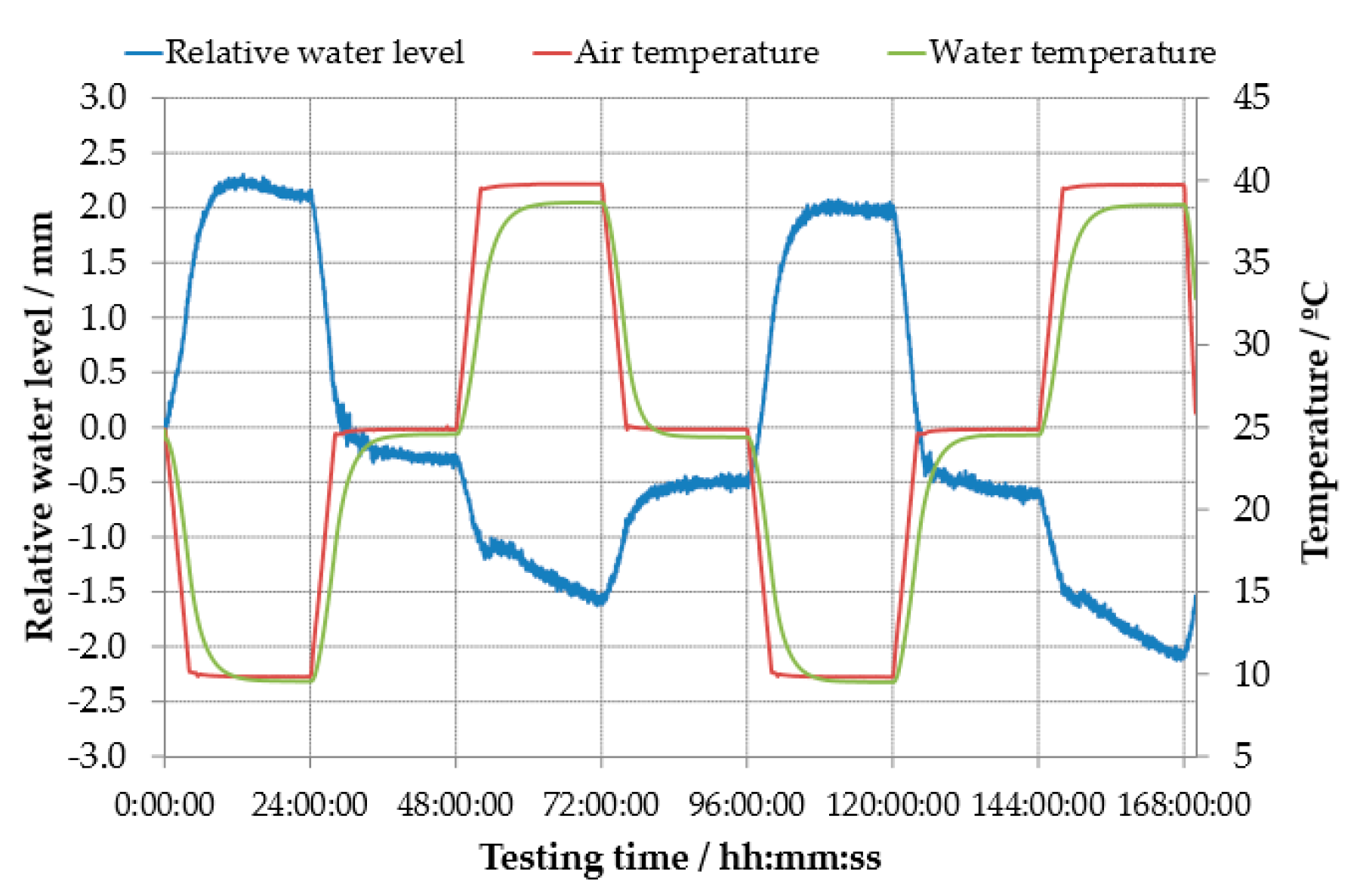
The characterization of the thermal influence on conductance transducers is considered a relevant condition to be studied, namely in the temperature interval ranging from 10 °C up to 40 °C, since maritime reduced-scale models are usually tested in large experimental indoor facilities where the air temperature can easily reach these extreme values between winter and summer seasons.
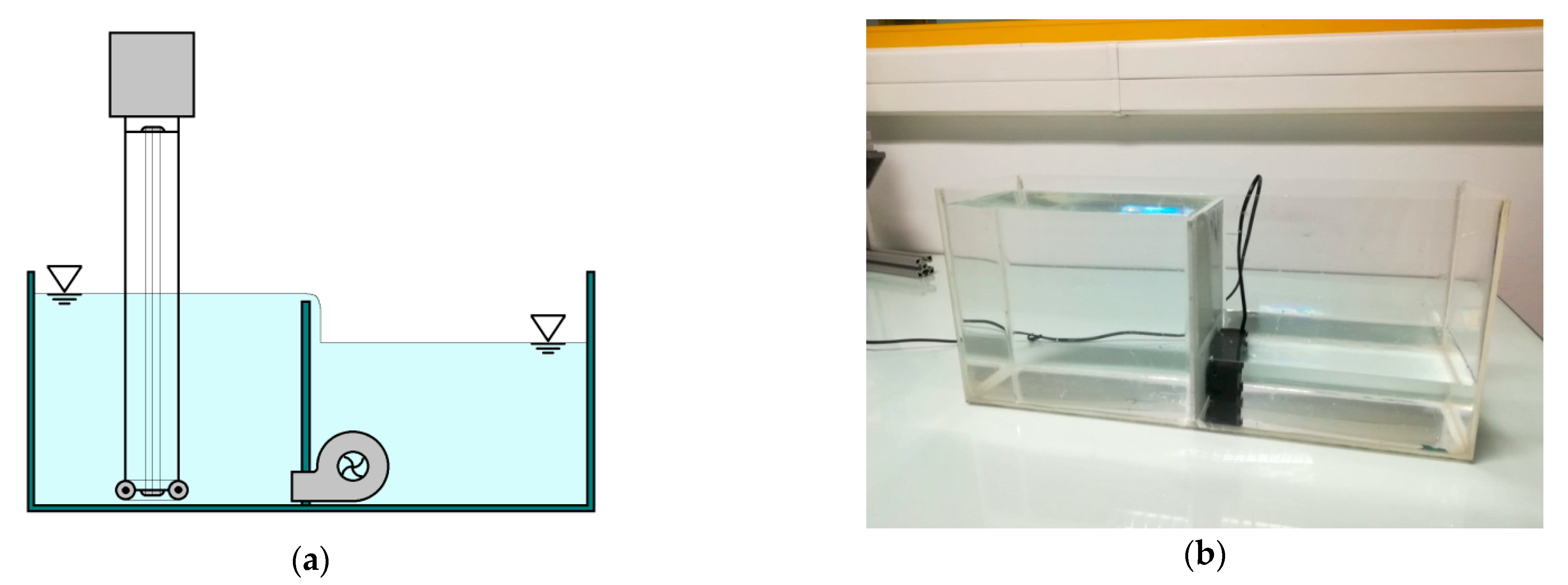
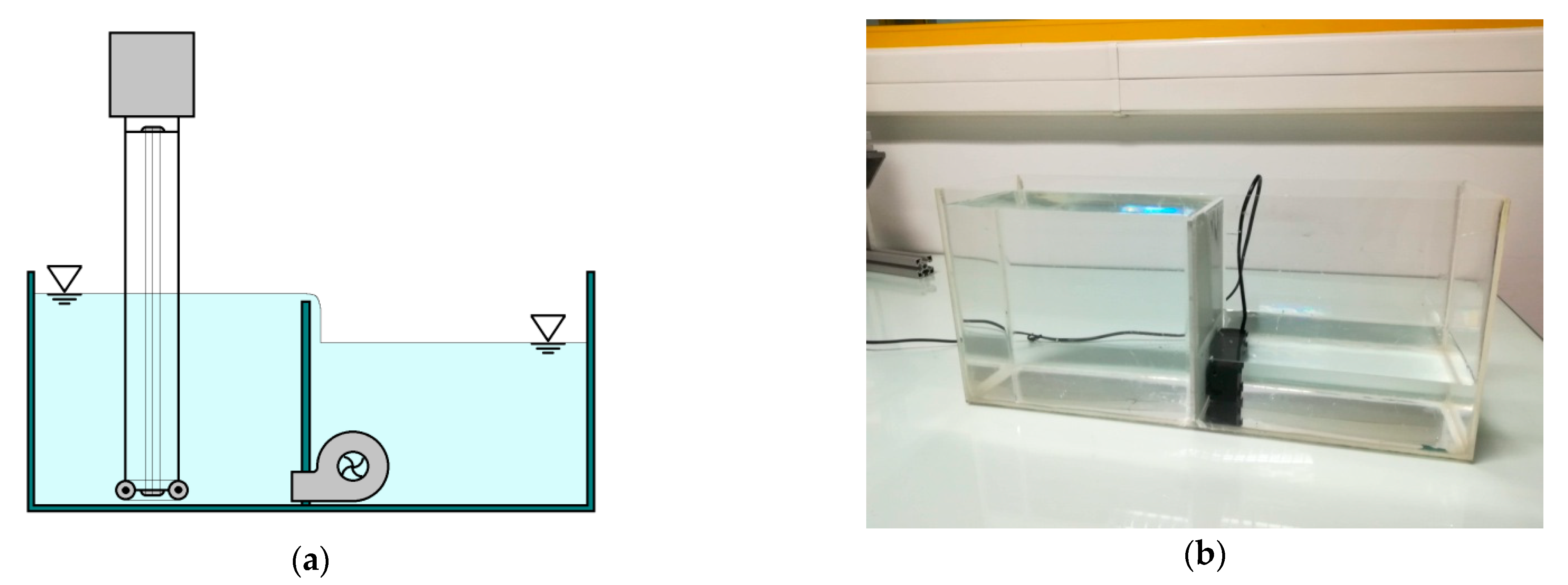
The proposed characterization method is supported in the use of a climatic chamber, where a conductance sensor can be installed, having half-immersion position at the water level. Due to the evaporation phenomenon, the water level can be significantly reduced, namely, if long-term thermal testing is made. In order to maintain a constant water level in the testing box of the conductance transducer, a water reservoir prototype was designed and produced, being composed by two separated compartments, being the water circulation between the compartments assured by a system of a propeller connected to an electrical engine, as seen in
Figure 5.
The established hydraulic circuit originates different, but nearly stationary, water levels in each compartment. One of them is used for the conductance transducer immersion, while the remaining one contains the propeller and the electrical engine.
In this study, due to the volume restriction inside the climatic chamber (Aralab, model Fitoclima 300, with known thermal stability and uniformity), this assembly was applied to the thermal testing of a conductance transducer (id. 57.12) with a measurement interval of ±140 mm, connected to the studied off-the-shelf power source, regulated for a nominal input voltage of 15 V (DC). Water and air temperature measurements were obtained from two resistance thermometers connected to a Wheatstone bridge (ASL, model F250) and installed, respectively, in the water compartment of the conductance transducer and in the climatic chamber, as shown in
Figure 6.
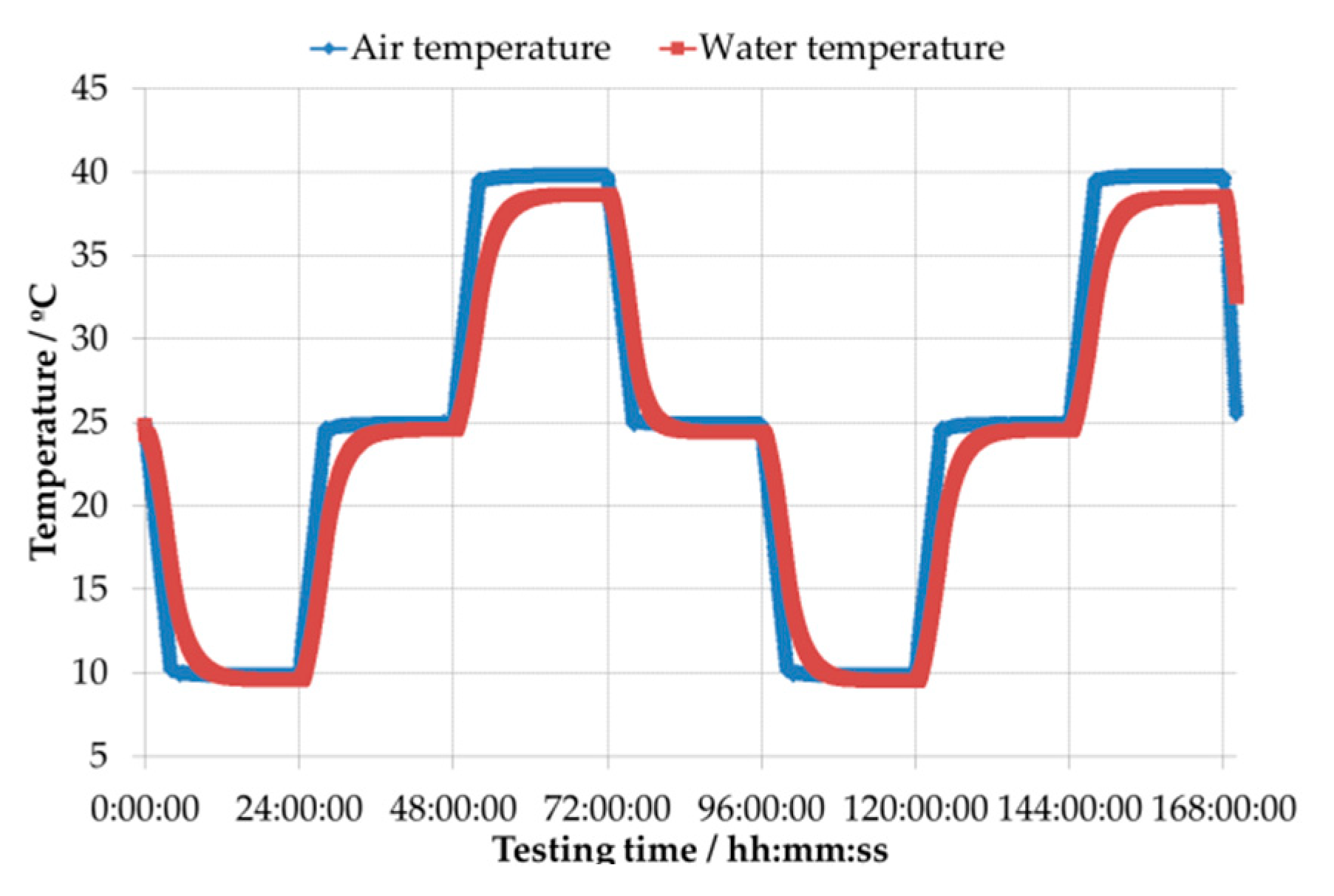
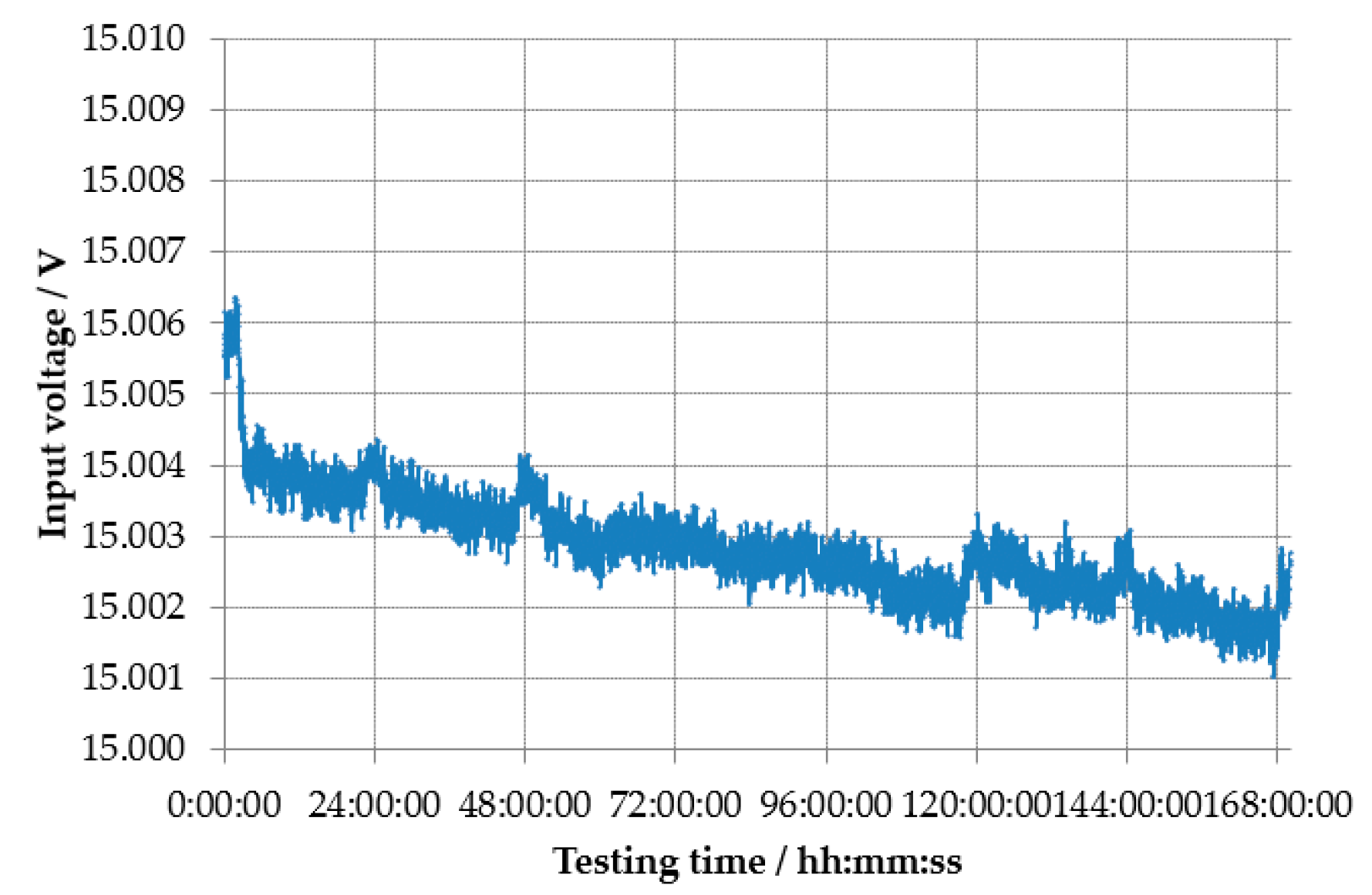
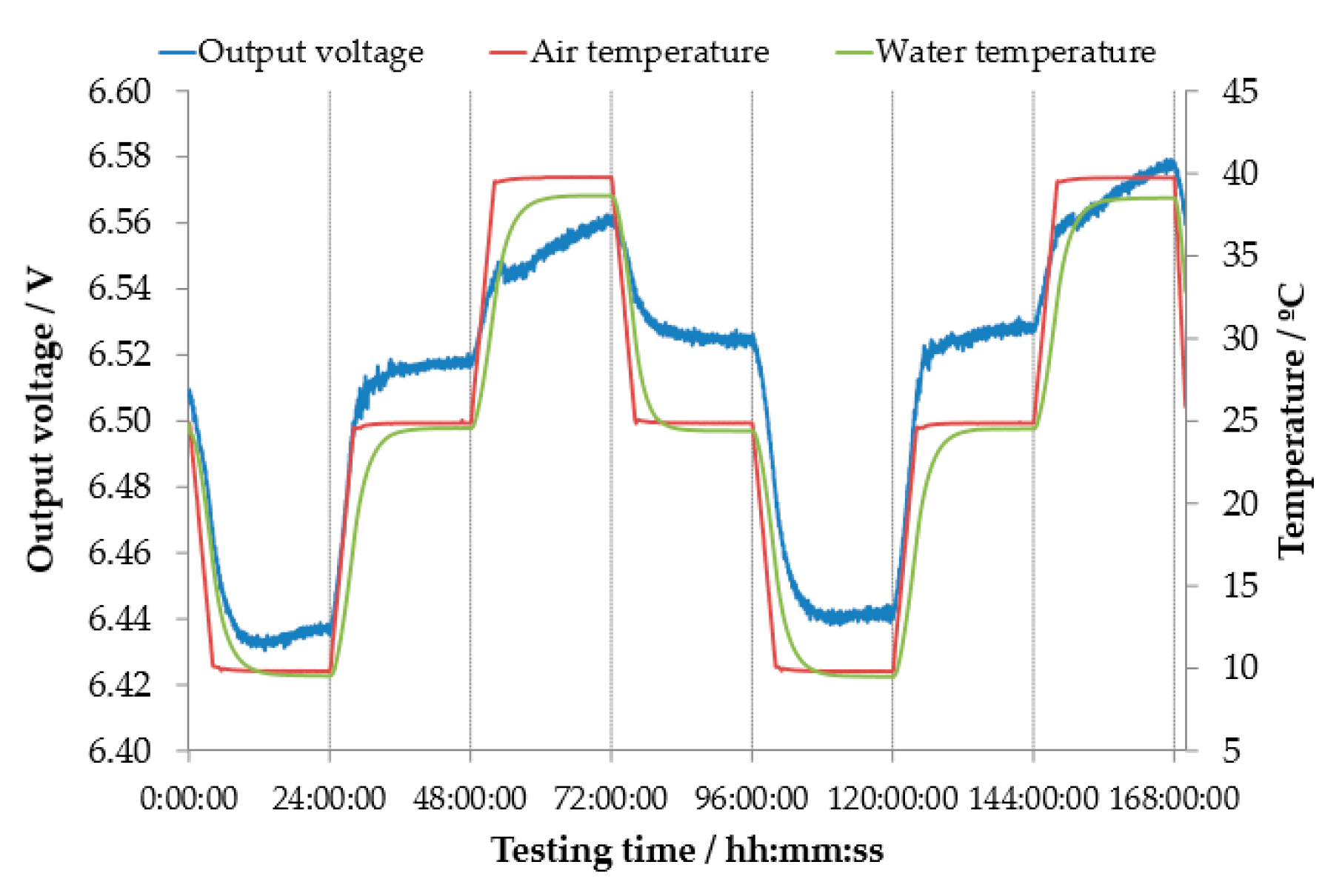
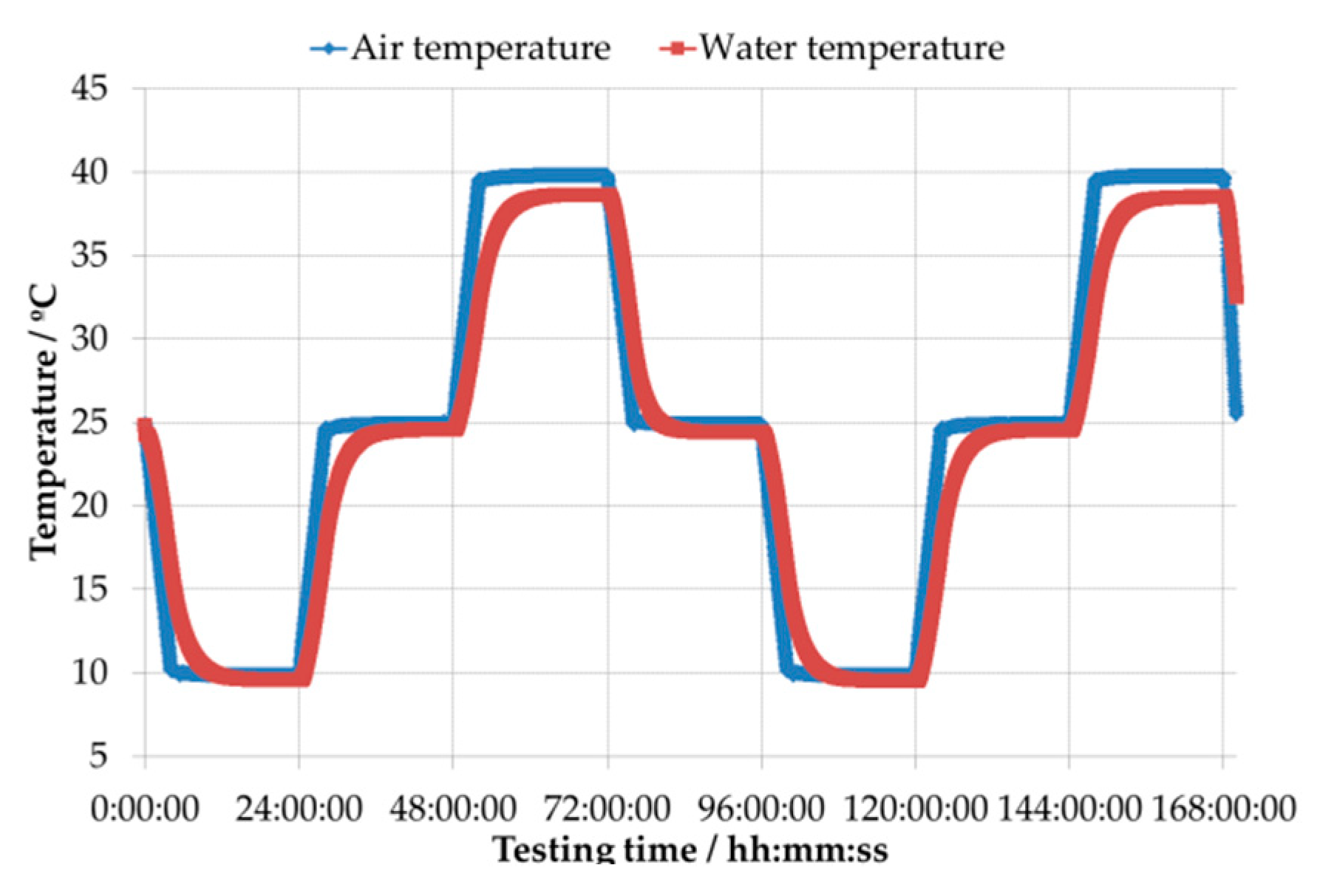
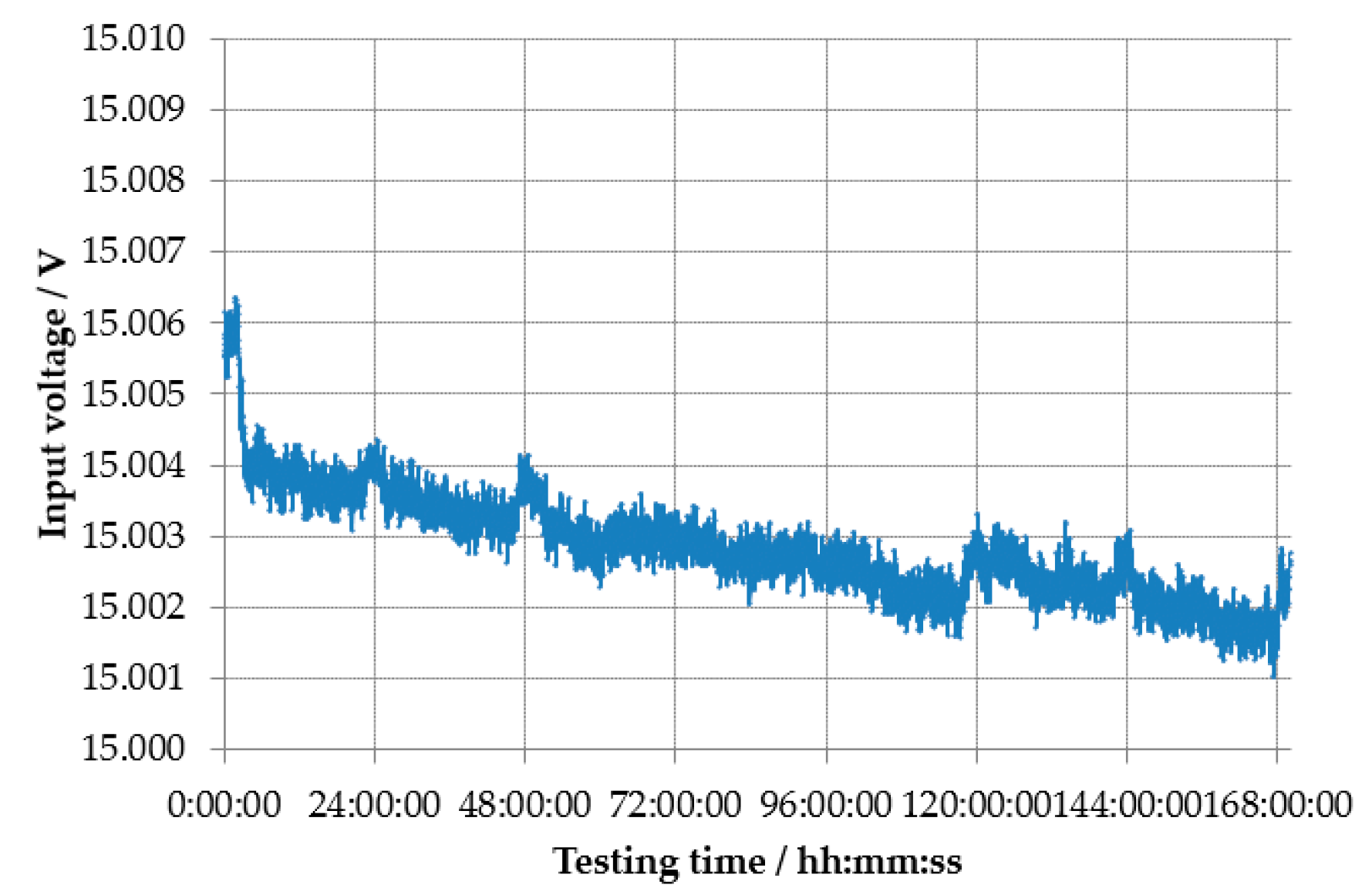
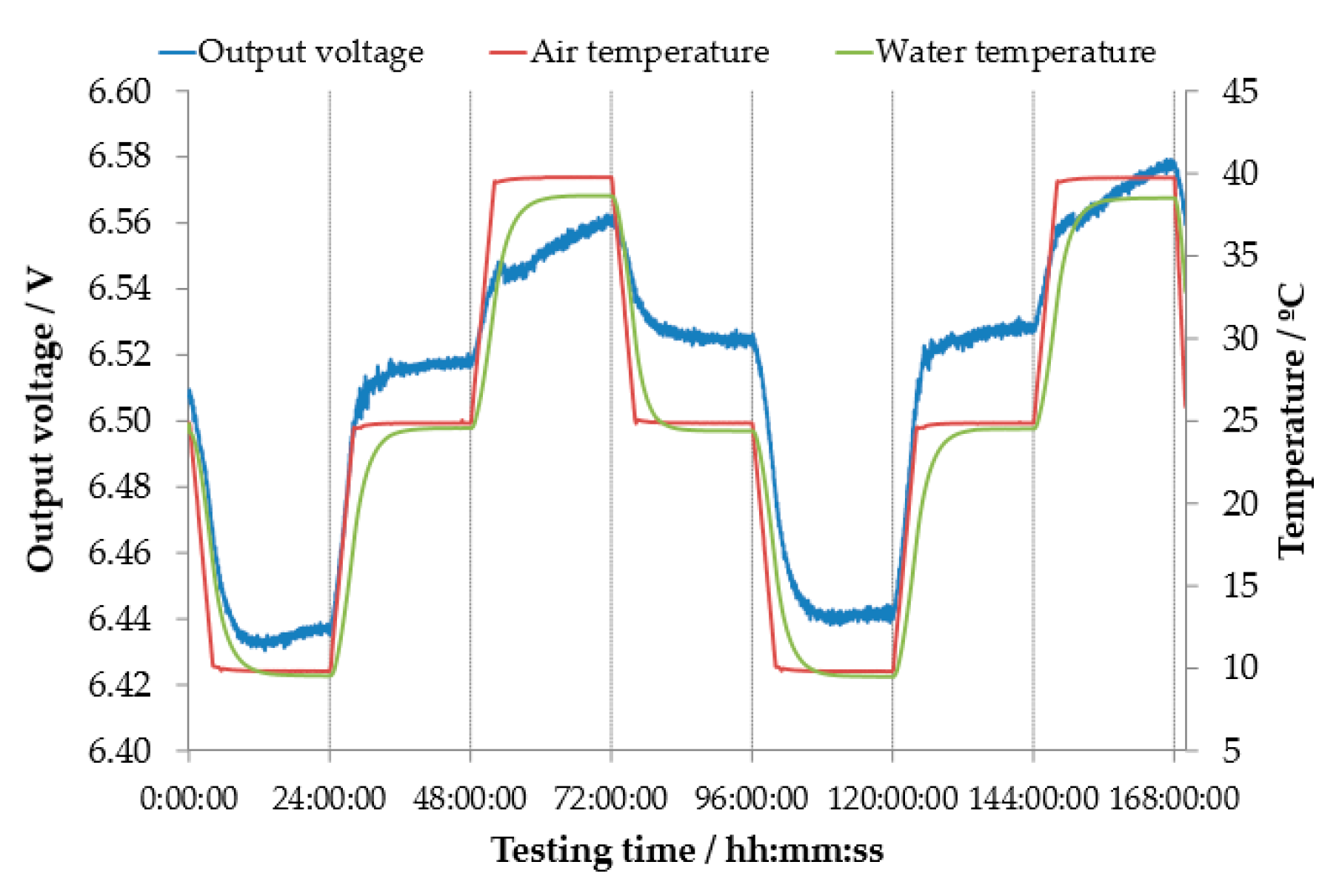
The thermal cycle setup in the climatic chamber was composed by the following air temperature sequence: 10 °C; 25 °C; 40 °C; 25 °C; 10 °C; 25 °C; 40 °C. Each of the mentioned testing steps had a duration of 20 h with a transition ramp of four hours between steps; therefore, the total duration of the thermal testing corresponded to 172 h. For these temperatures, input and output voltages were measured at conductance transducer terminals (using a digital multimeter HP, model 3457A) having a sampling rate for all the measured quantities of two minutes between consecutive measurements.
5. Instrumental Measurement Uncertainty
Based on the results obtained from the performed experimental activities described in
Section 4, several uncertainty components were identified, each one contributing for the instrumental measurement uncertainty of the conductance transducer.
A first group of uncertainty components is related to the input quantities—output voltage and linear parameters of the calibration curve—which can be propagated to the output quantity—water level—by application of the GUM Law of Propagation of Uncertainty [
9], resulting in the following expression:
taking into account the uncertainty contribution,
u(
h)
cur, of the adopted linear calibration curve of the conductance transducer
where
h is the water level (in mm),
m is the slope linear parameter (expressed in mm∙V
−1),
V is the output voltage of the conductance transducer (expressed in V) and
b is the intercept linear parameter (in mm).
The sensitivity coefficients shown in Expression (2) are given by the following expressions:
allowing to write Expression (3) as
Both the standard uncertainties related to linear parameters,
u(
m) and
u(
b), as well as the correlation factor between parameters,
r(
m,
b), can be obtained from the application of the Least Squares Method (examples shown in
Table 1 and
Table 2 of
Section 4.2).
The standard uncertainty related to the output voltage,
u(
V), results from the combination of the identified uncertainty components: (i) calibration and drift of the used multimeter,
u(
V)
cal and
u(
V)
drf, respectively; (ii) resolution of the selected DC voltage measurement scale,
u(
V)
res; (iii) stability (noise) of the output voltage signal,
u(
V)
stb. Therefore, the application of the Law of Propagation of Uncertainty allows determining the standard uncertainty of the output voltage by
In addition to the water level uncertainty component related with the calibration curve,
u(
h)
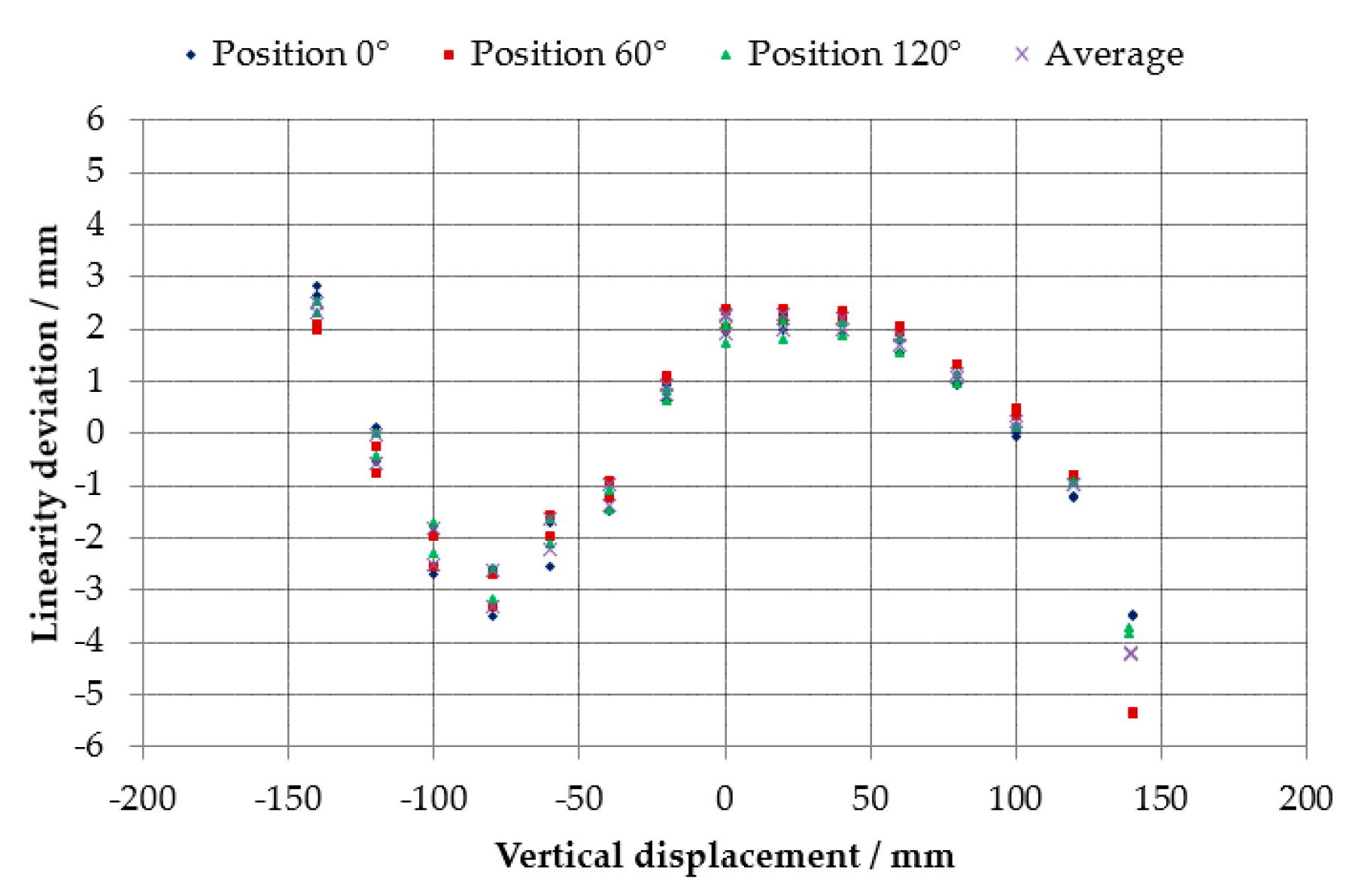
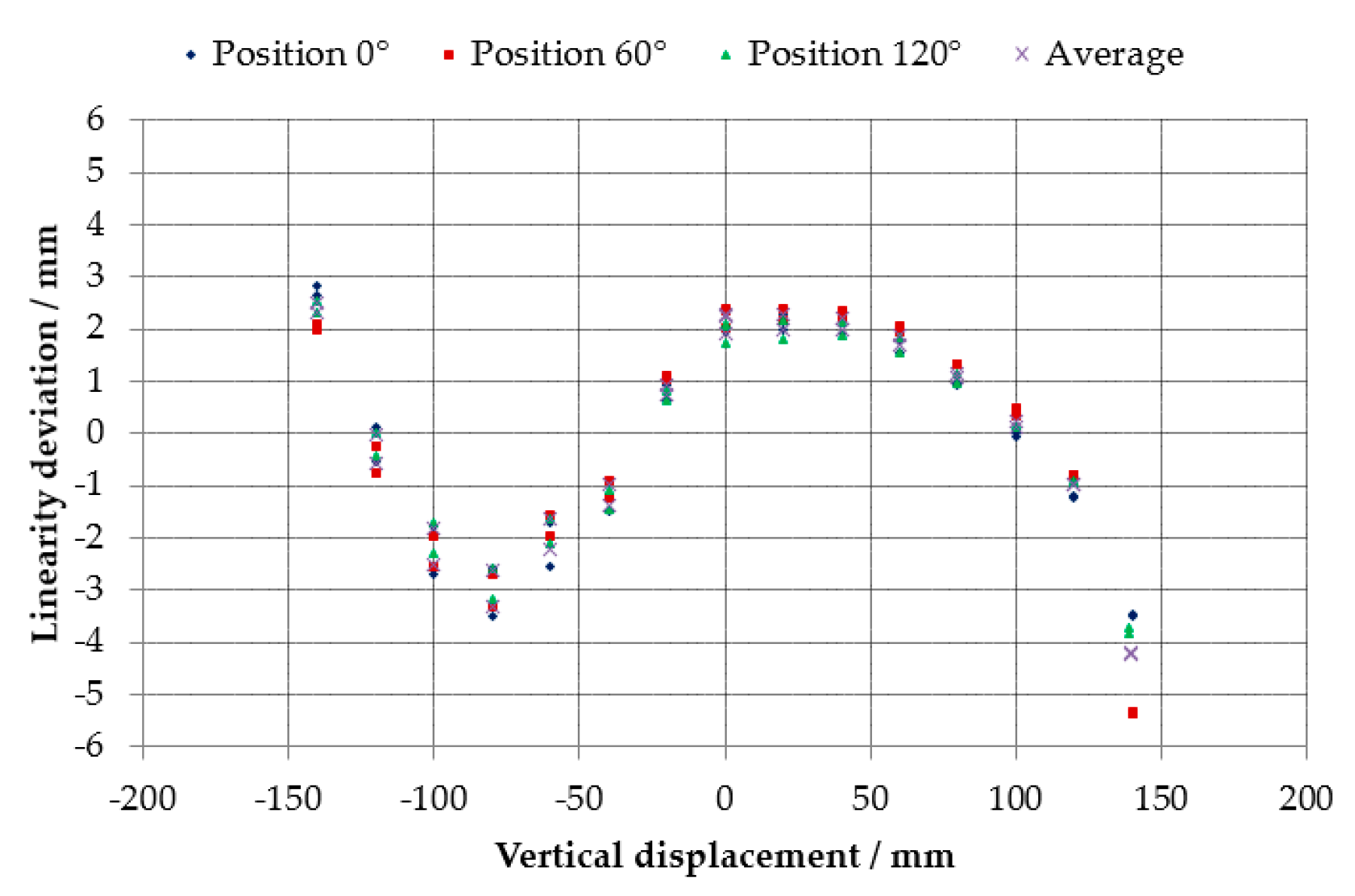
cur (given by Expression 7), the metrological characterization of the conductance transducers allowed to identify the following uncertainty components: linearity,
u(
h)
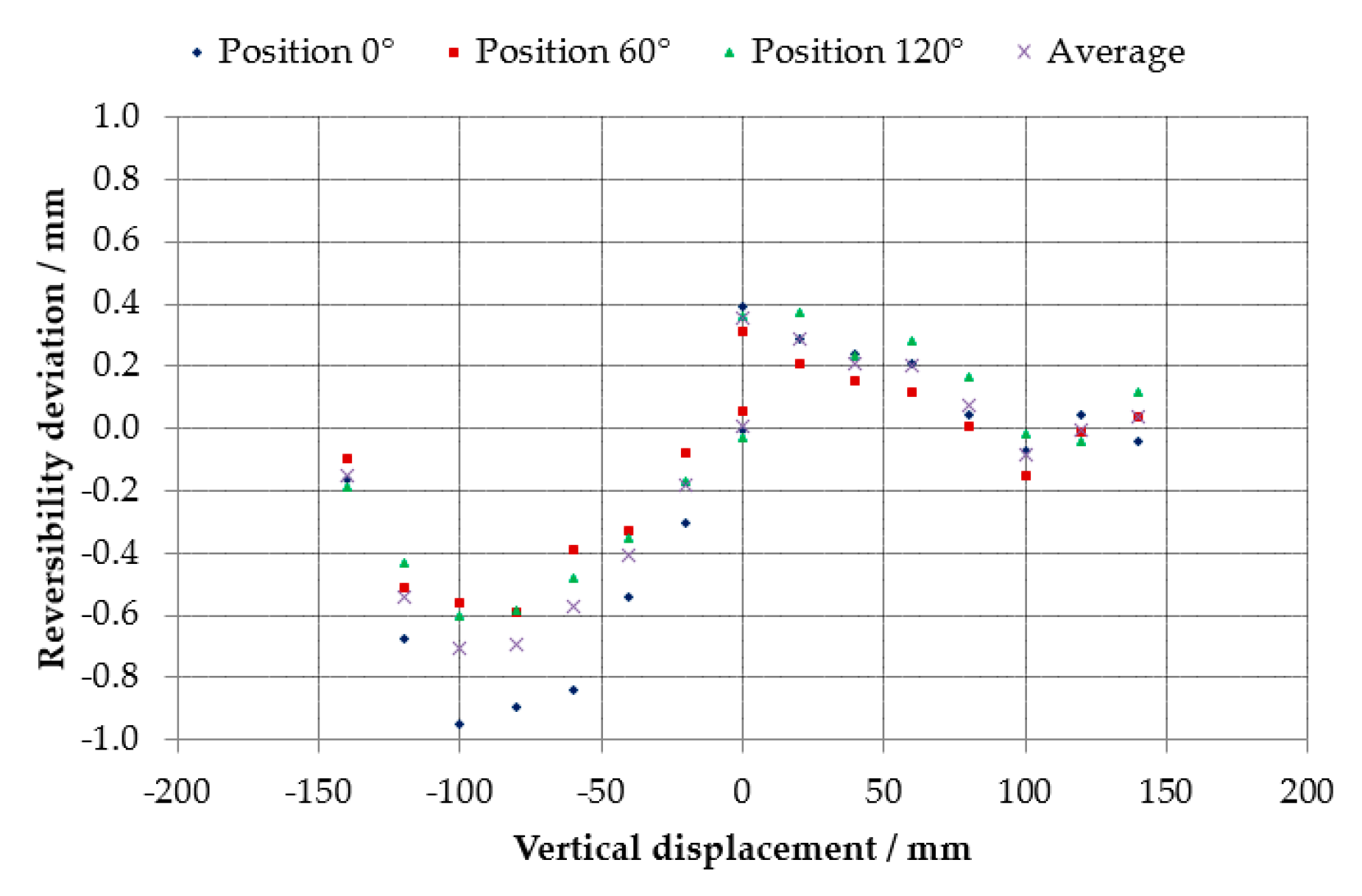
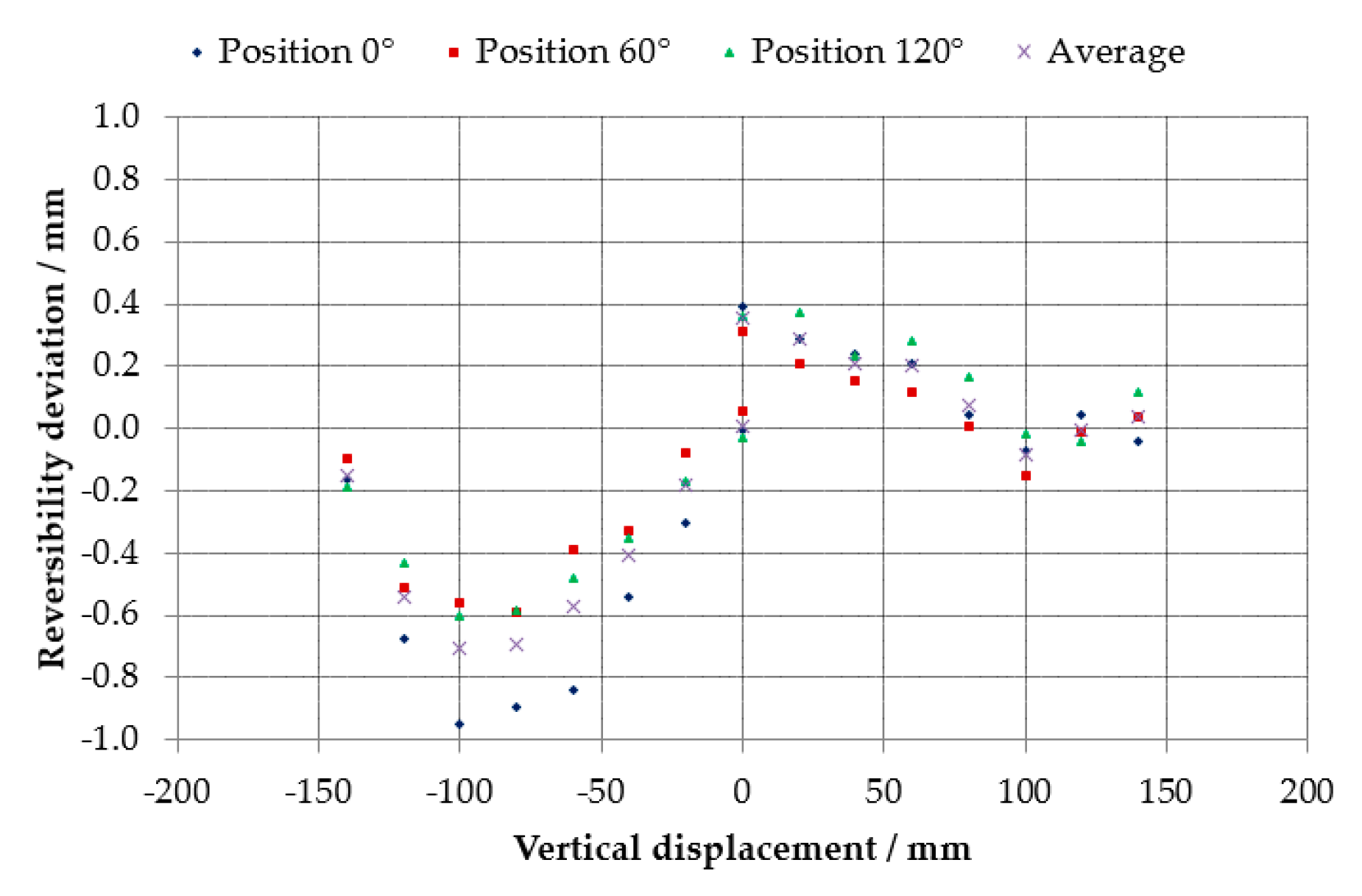
lin; dimensional reversibility,
u(
h)
rev; dimensional stability,
u(
h)
stb; temperature influence,
u(
h)
θ,t; and thermal reversibility,
u(
h)
θ,r. Therefore, the combined measurement uncertainty of the water level obtained by the conductance transducer is given by
Based on the presented formulation, and taking into account the experimental results shown in
Section 4,
Table 6 presents the measurement uncertainty budget, which supported the determination of the instrumental uncertainty of the short-range (±140 mm) conductance transducer, for a nominal output voltage equal to 5 V (DC), and considering a correlation factor of −0.88 between linear parameters of the calibration curve.
Based on the results presented in
Table 6, a combined measurement uncertainty of 1.7 mm was obtained for the conductance transducer. The calculated number of effective degrees of freedom is equal to 123, which gives a coverage factor of 2.02, considering a 95% level of confidence. Therefore, the expanded measurement uncertainty of the conductance transducer is equal to 3.5 mm. Additional calculations were performed the voltage measurement interval comprised between 0.5 V and 10 V, for which a maximum value of 3.7 mm for the expanded measurement uncertainty was obtained in the measurement interval limits. This minor increase is justified by the higher measurement uncertainty of the calibration curve in the extreme regions of the measurement interval, as expected.
Table 6 shows the linearity and the temperature influence as the two major uncertainty sources for the instrumental uncertainty of the conductance transducer, followed by the calibration curve. In the case of the linearity, this uncertainty component can be improved considering: (i) a reduction of the measurement interval (if suitable of the maritime reduced-scale model observation); (ii) or the use of a higher order calibration curve (a quadratic curve, for example), instead of a linear calibration curve. The temperature influence contribution to the instrumental uncertainty can be reduced if the conductance transducer is operated under controlled environmental conditions, as it was the case of the linearity, reversibility, and repeatability tests, which supported the determination of the calibration curve.
6. Discussion
The performed study showed that the proposed metrological characterization methods are suitable for the determination of the instrumental measurement uncertainty of conductance transducers used in maritime reduced-scale models, and can be used as a regular laboratorial calibration method, making water level measurements traceable to the SI. In this context, improvements are still possible, namely, the conductance transducer testing only in a wet condition, which should improve the repeatability and the reversibility of the conductance transducers measurements. Special care should also be given to measurements performed in extreme regions of the measurement interval.
The developed instrumental measurement uncertainty evaluation procedure is now available for application in the wide range of LNEC’s conductance transducers. The obtained values can be accounted for in field and computational simulations, therefore, improving the study of the physical phenomena.
Future work will be focused in the metrological study of in situ application of LNEC’s conductance transducers in maritime reduced-scale models, since this study revealed a significant impact of the electrical and environmental influence in the measurement accuracy. Validation of in situ on-the-job verification procedures is a key issue, which will be considered in the near future, namely, the development of measurement standards and methods able to provide in situ traceability transfer.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}