3D Roughness Measurement of Failure Surface in CFA Pile Samples Using Three-Dimensional Laser Scanning


Abstract
1. Introduction
2. Test Materials
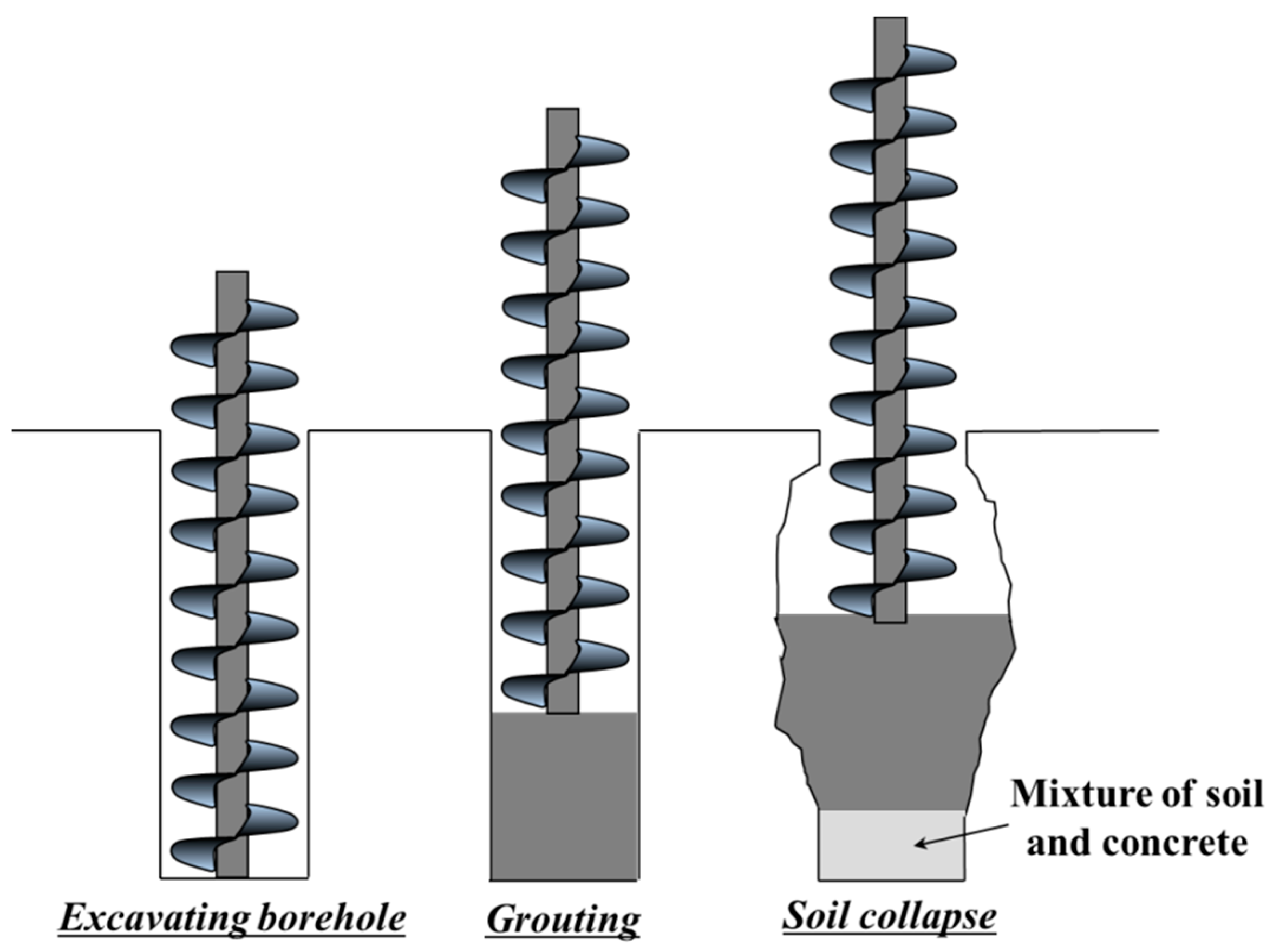
2.1. Ground Collapse in CFA Pile
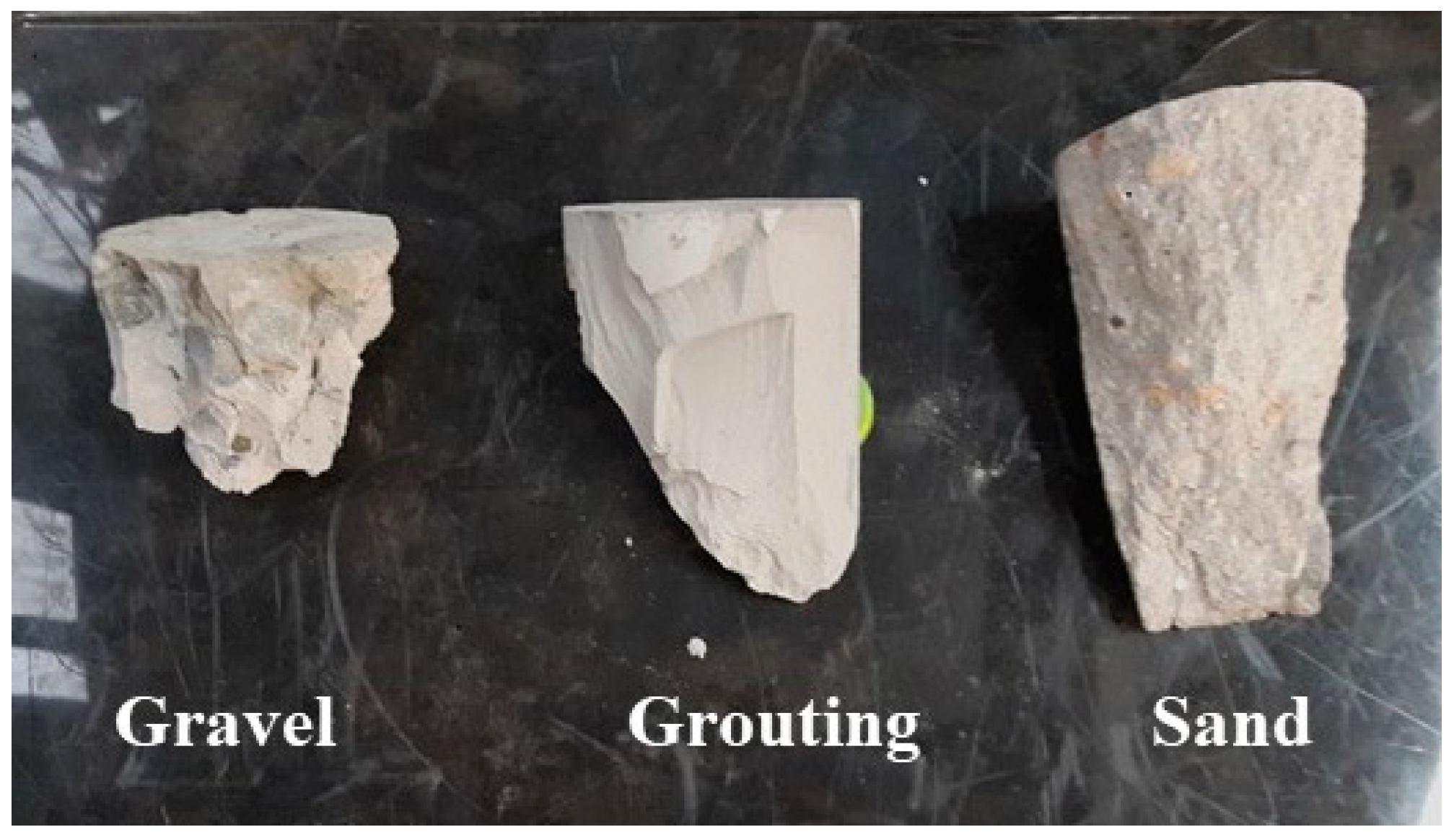
2.2. Uniaxial Compression Test to Obtain Failure Surfaces of CFA Pile Samples
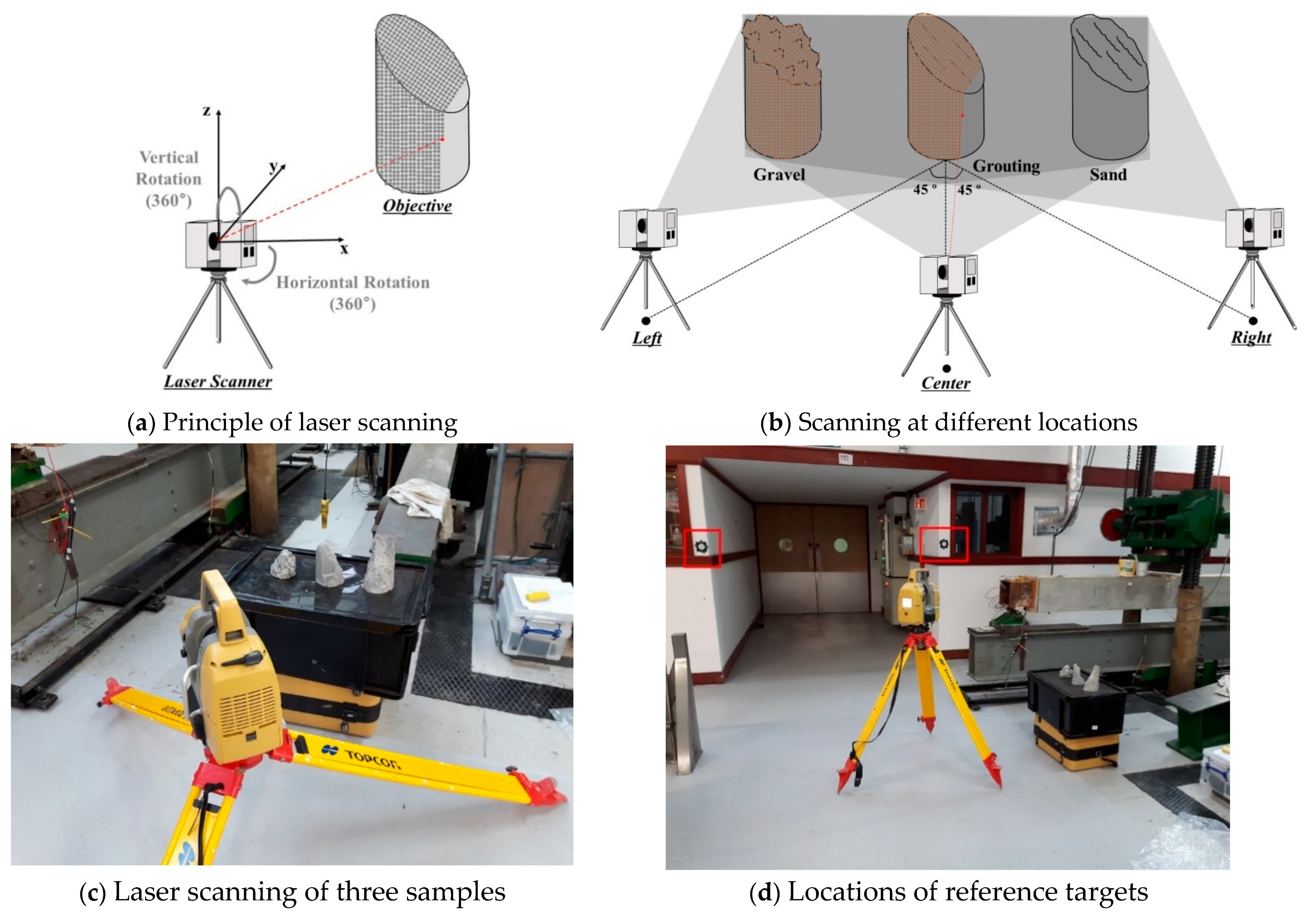
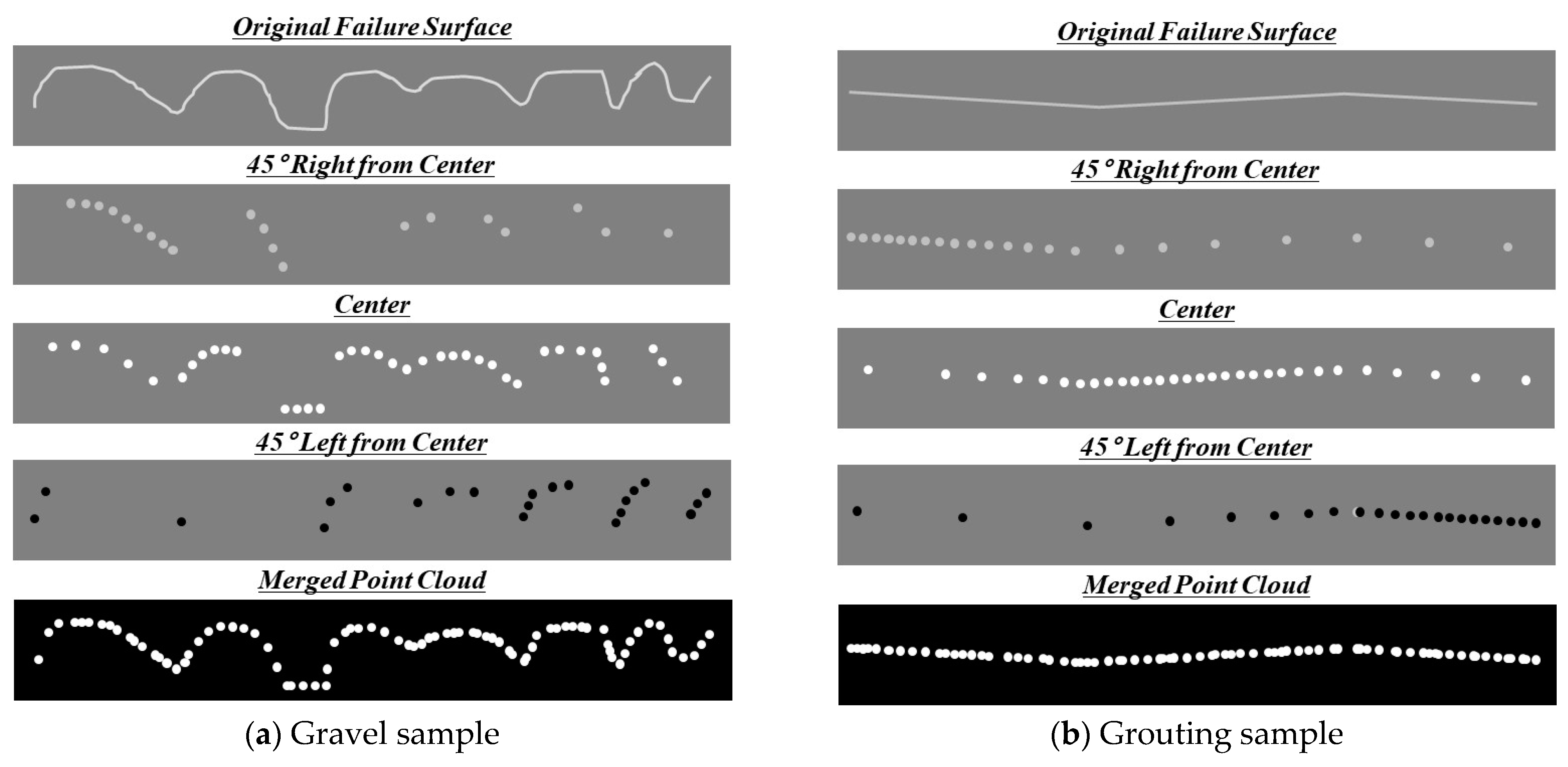
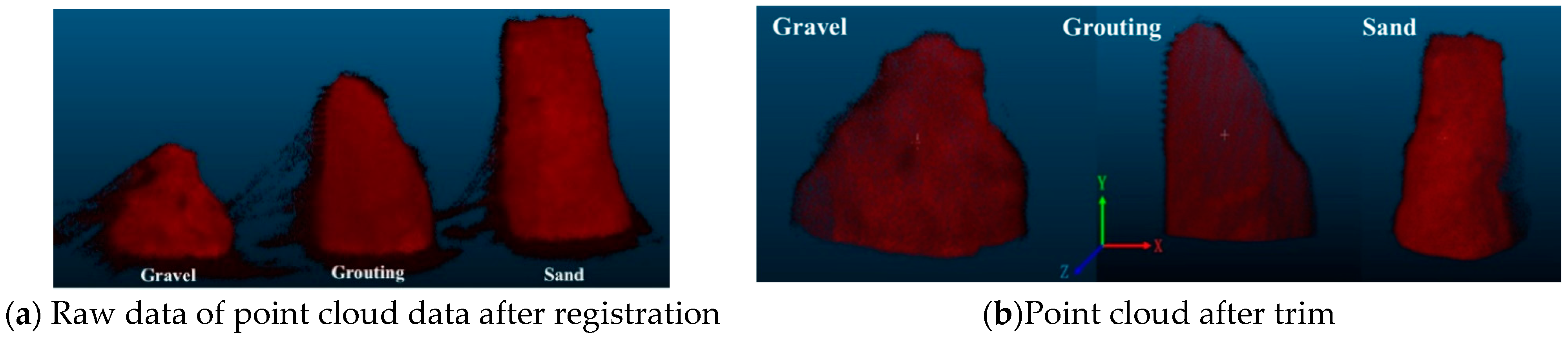
3. Test Method: 3D Laser Scanning
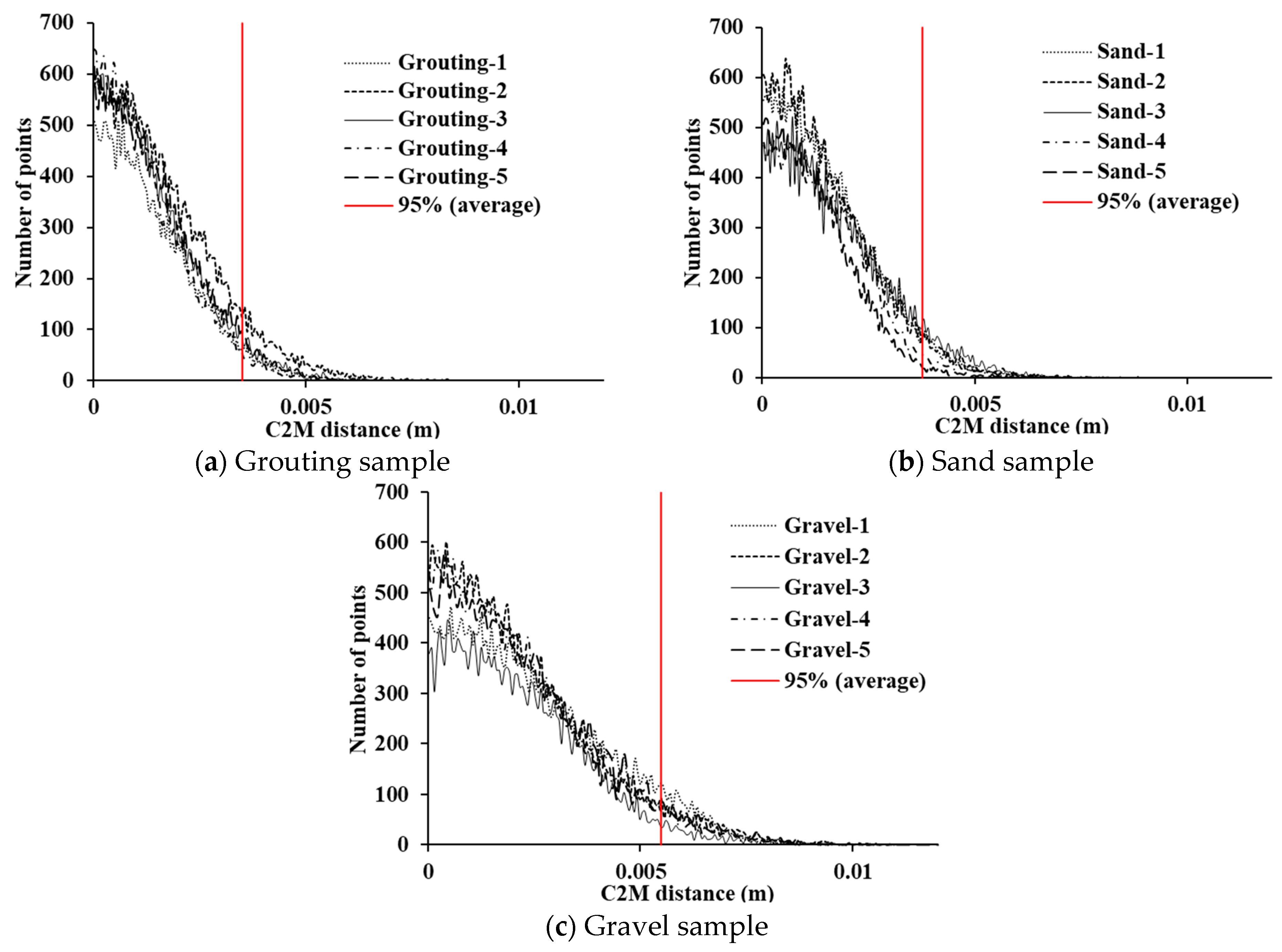
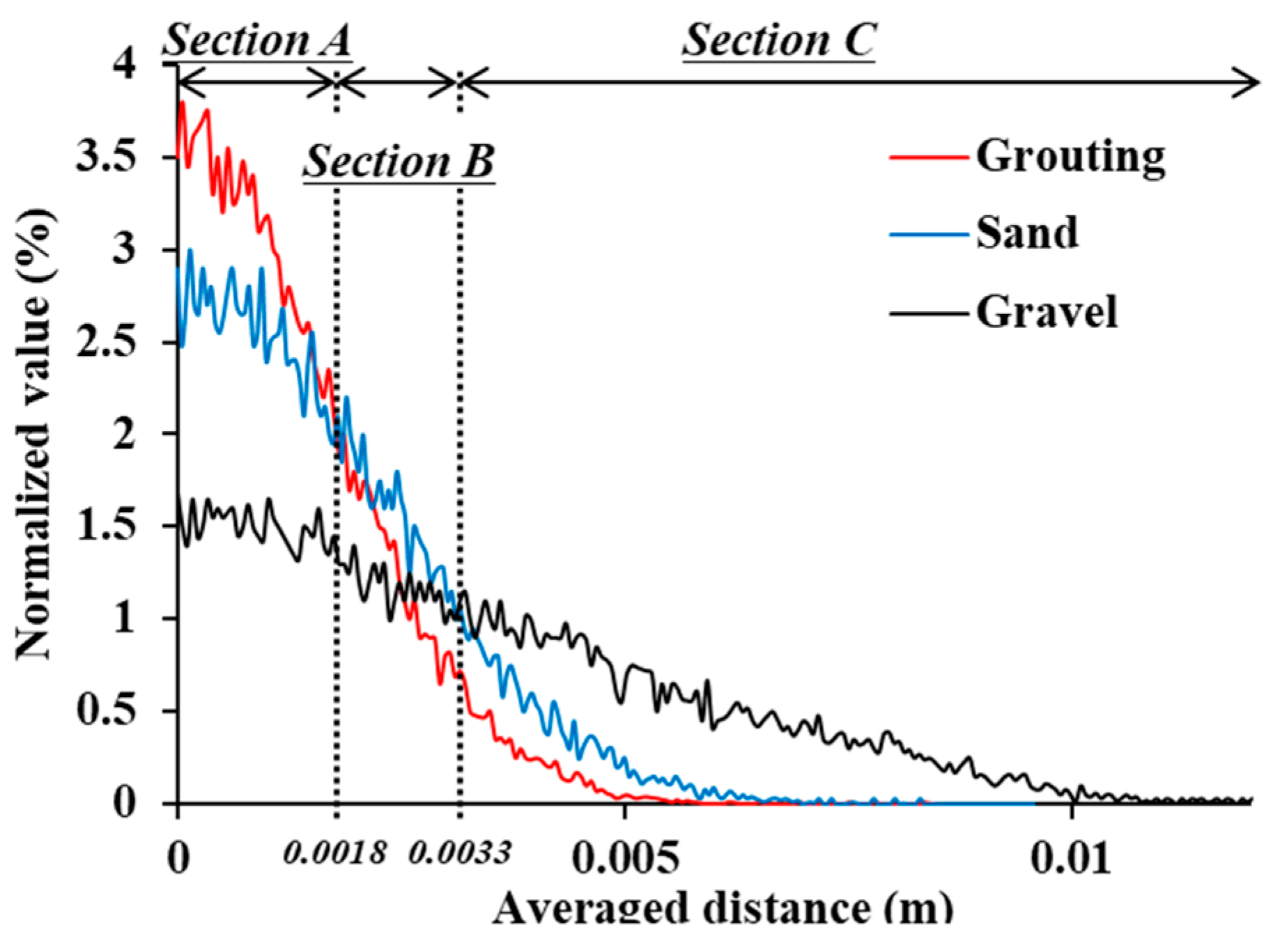
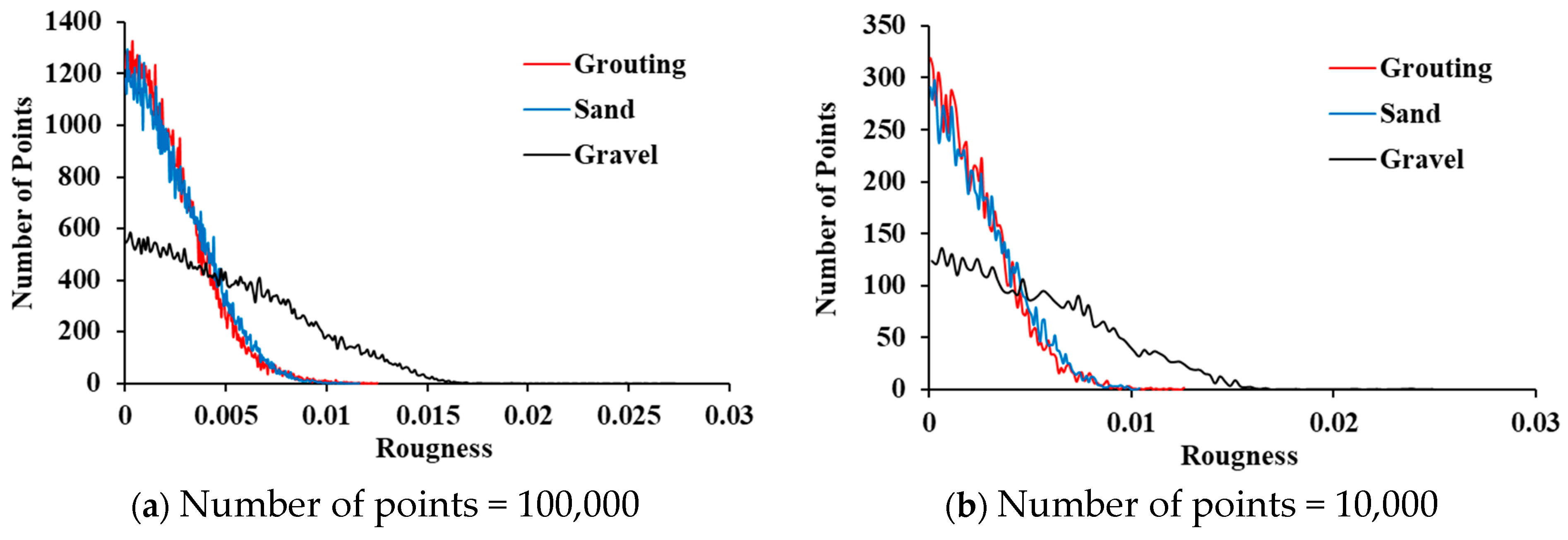
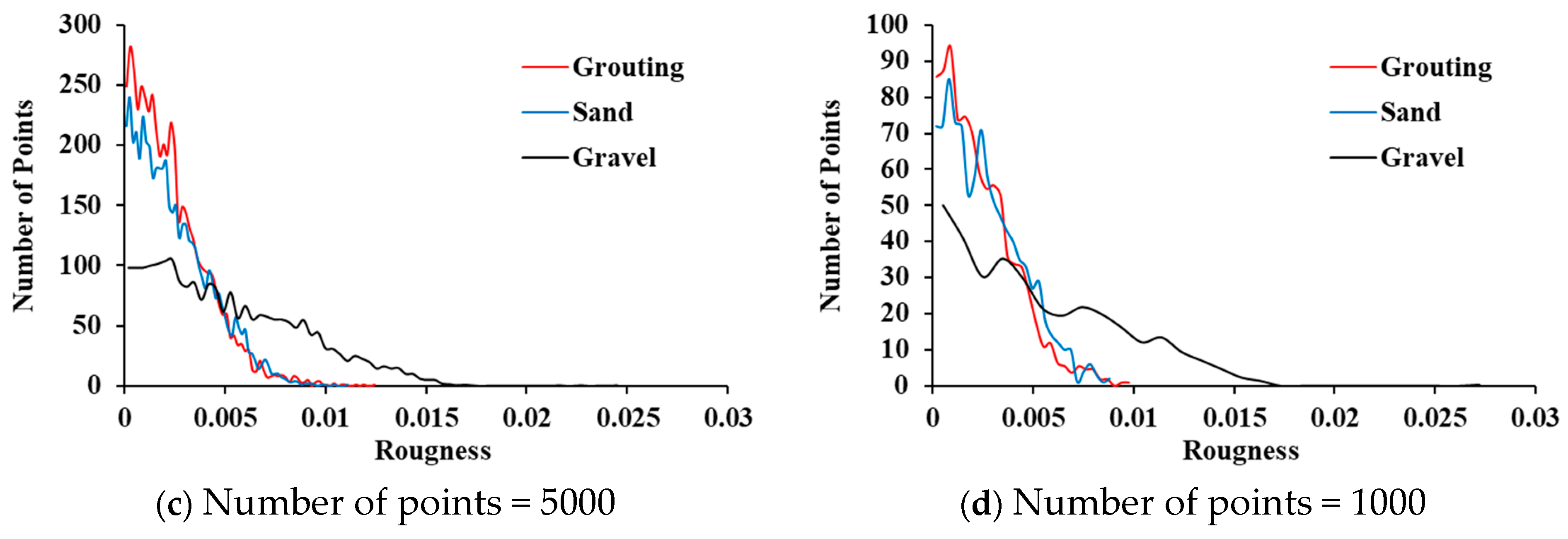
4. Analysis of Plane to Points Histogram (P2PH)
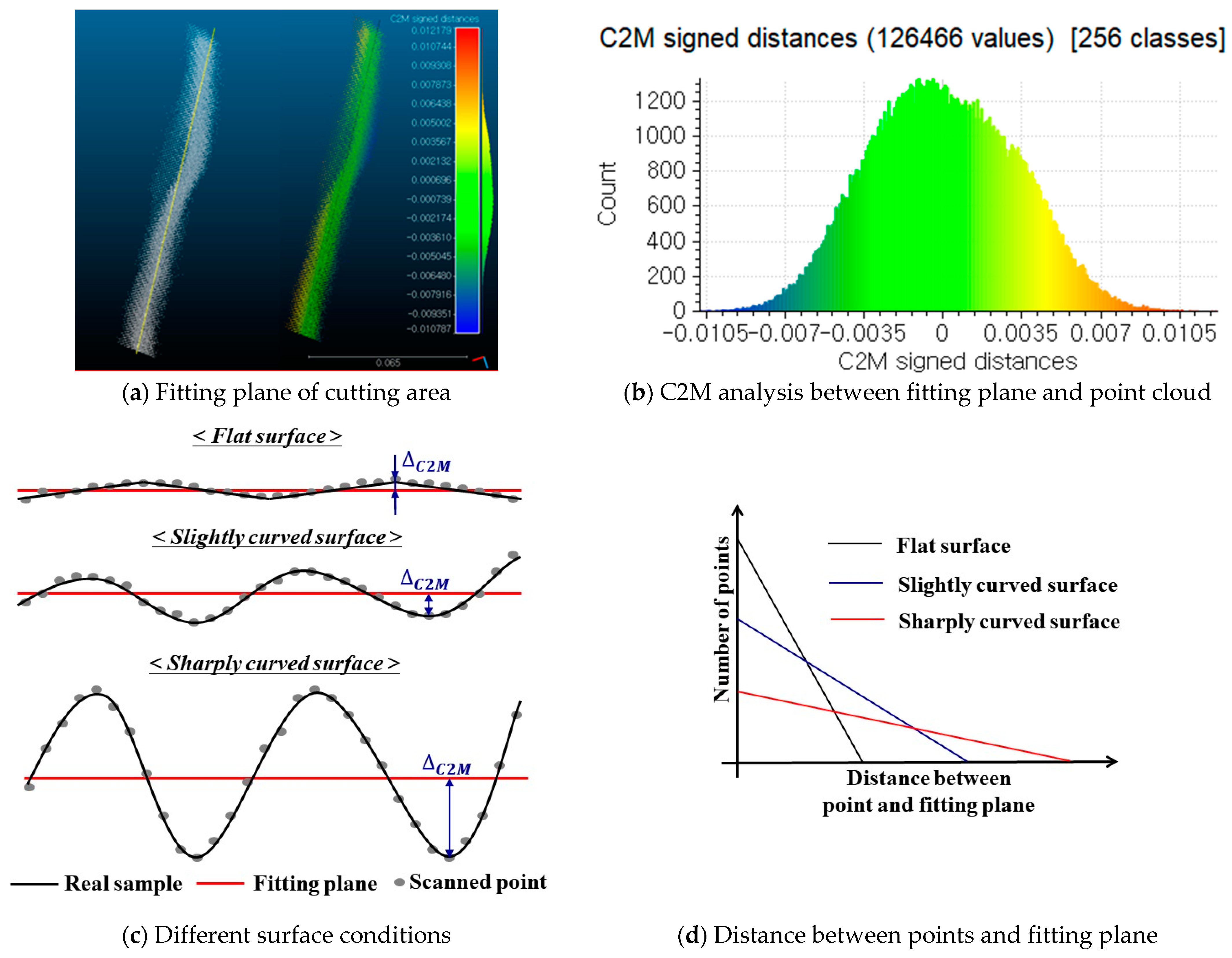
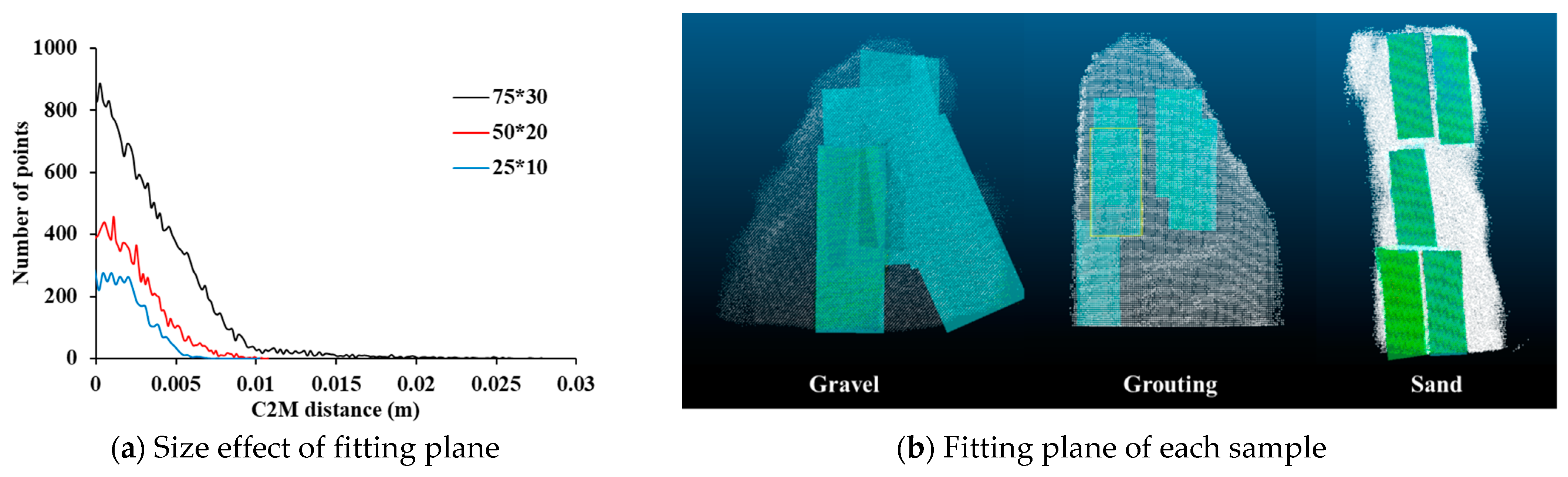
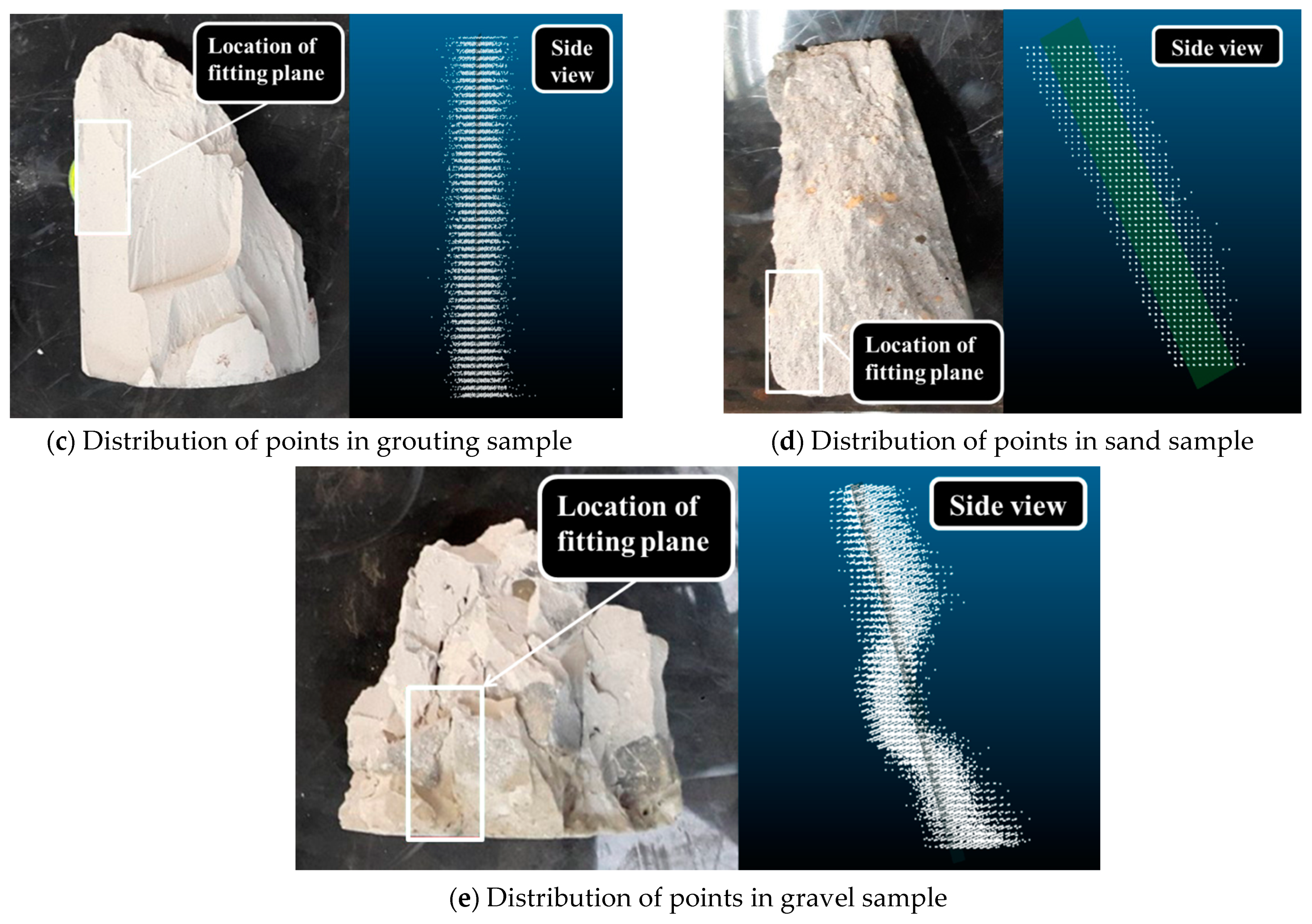
4.1. Analysis Method
4.2. Analysis Results
4.3. Discussion
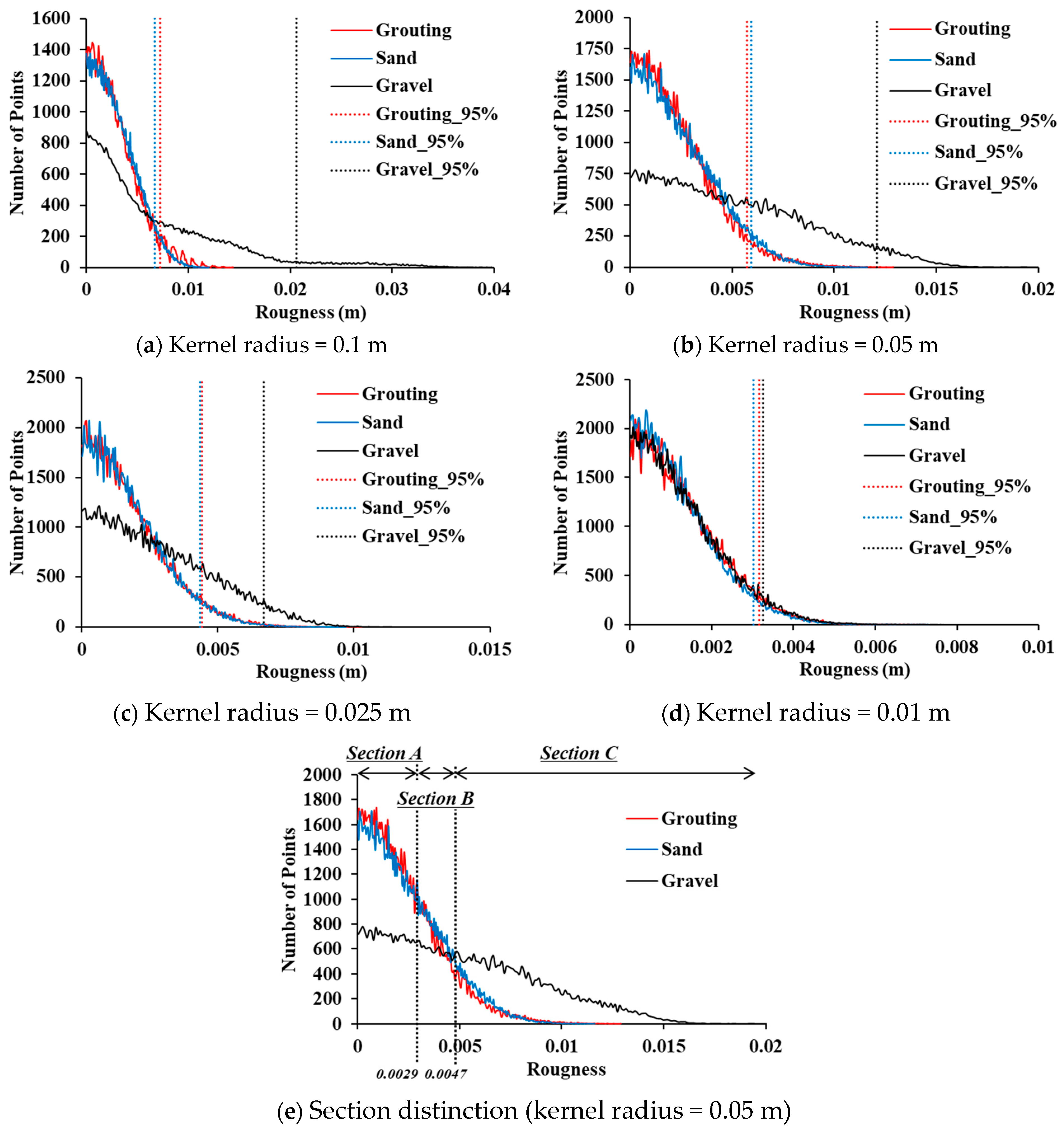
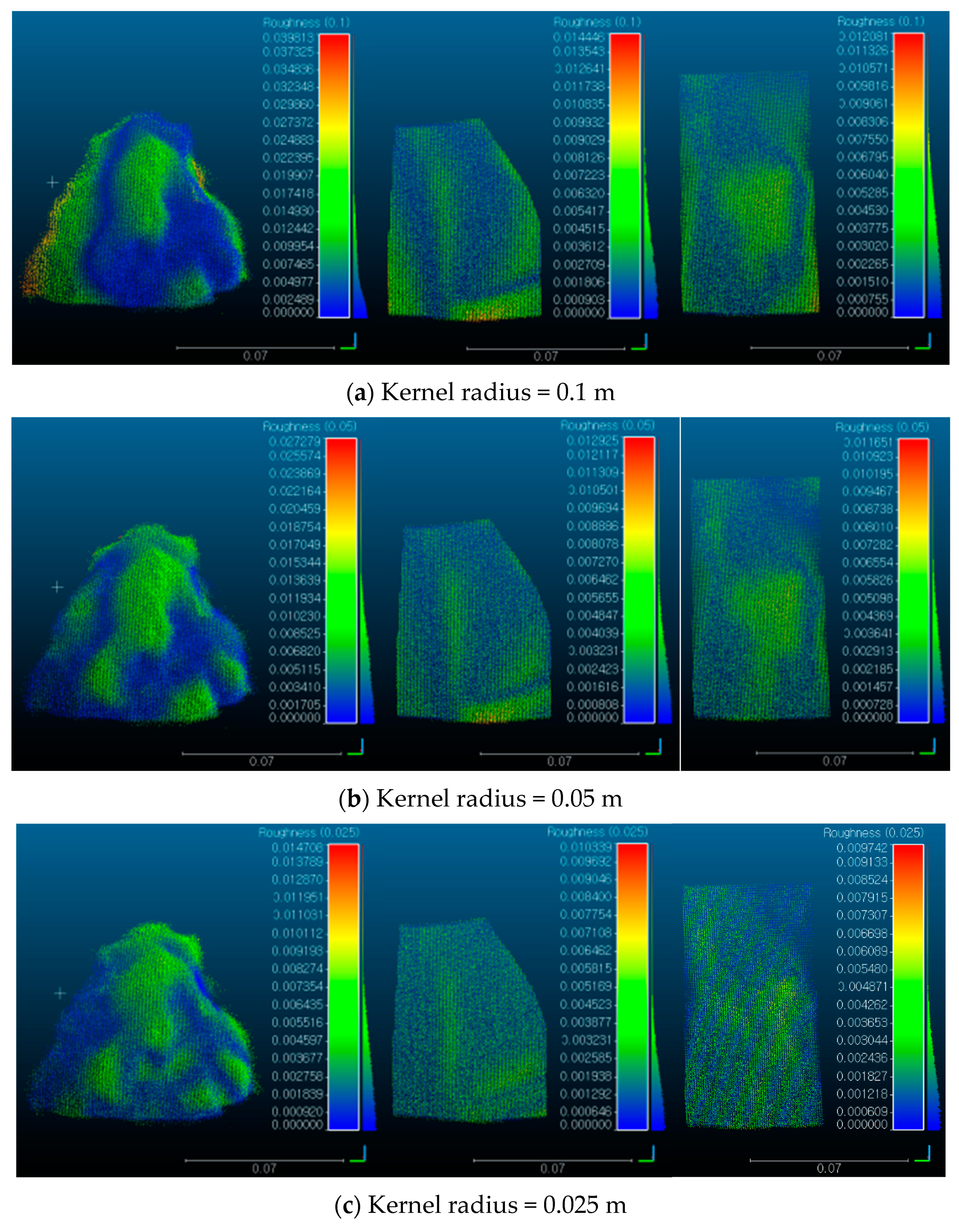
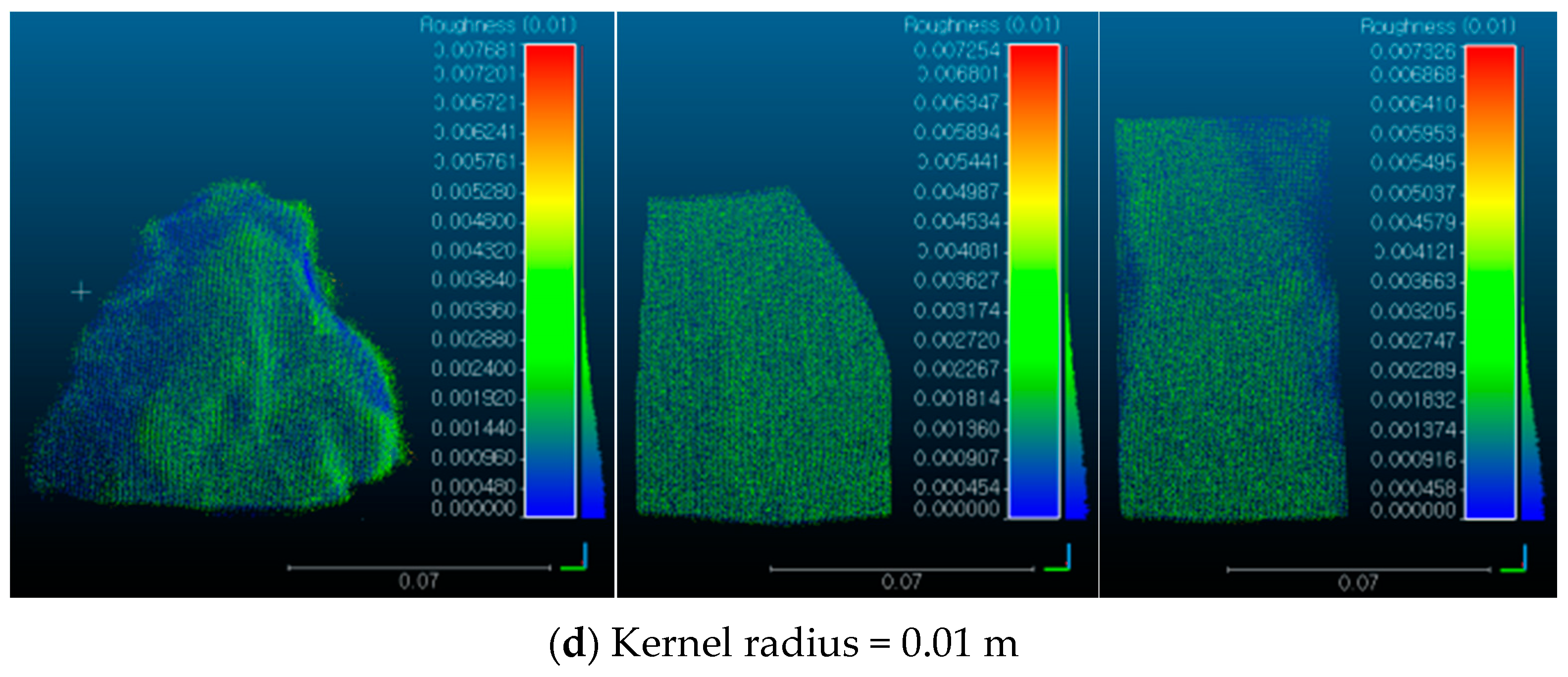
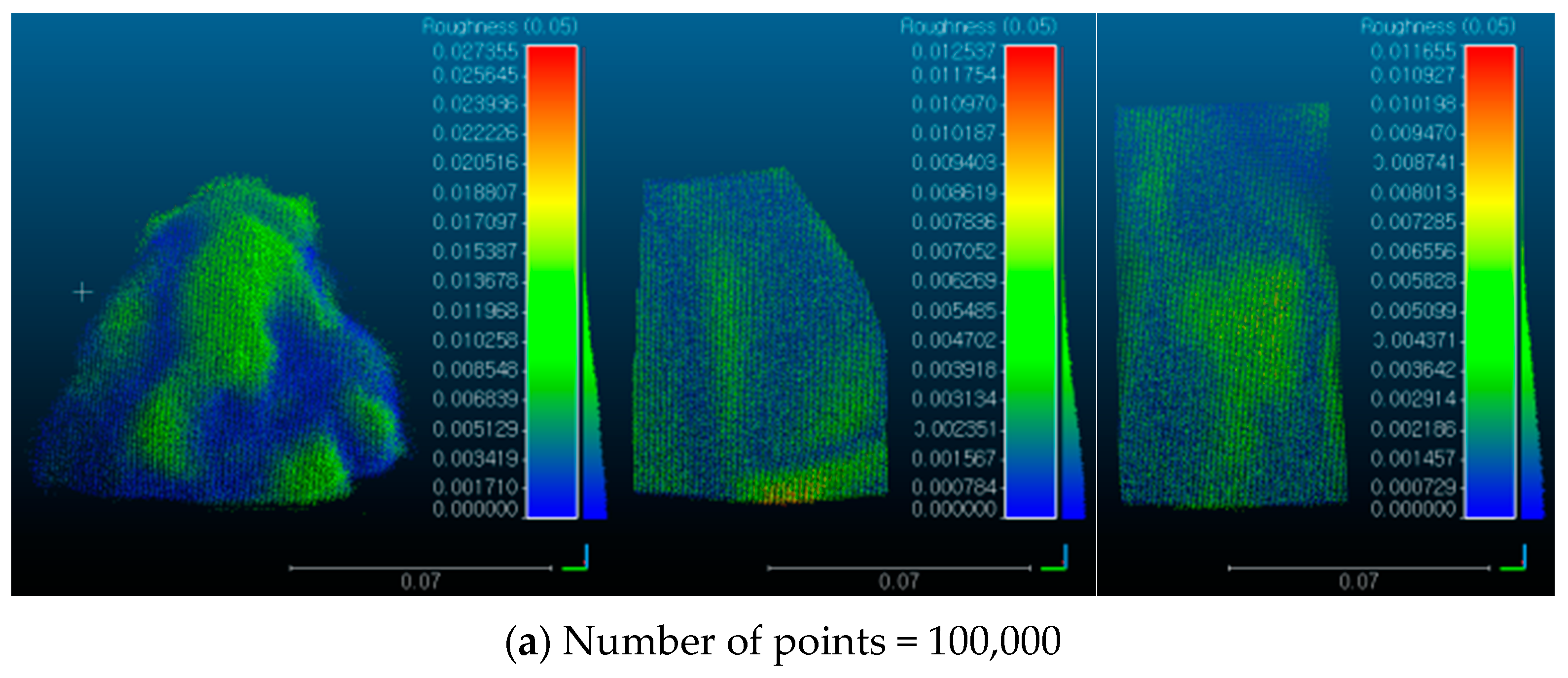
5. Analysis of Roughness Detection Method by Kernel
5.1. Analysis Method
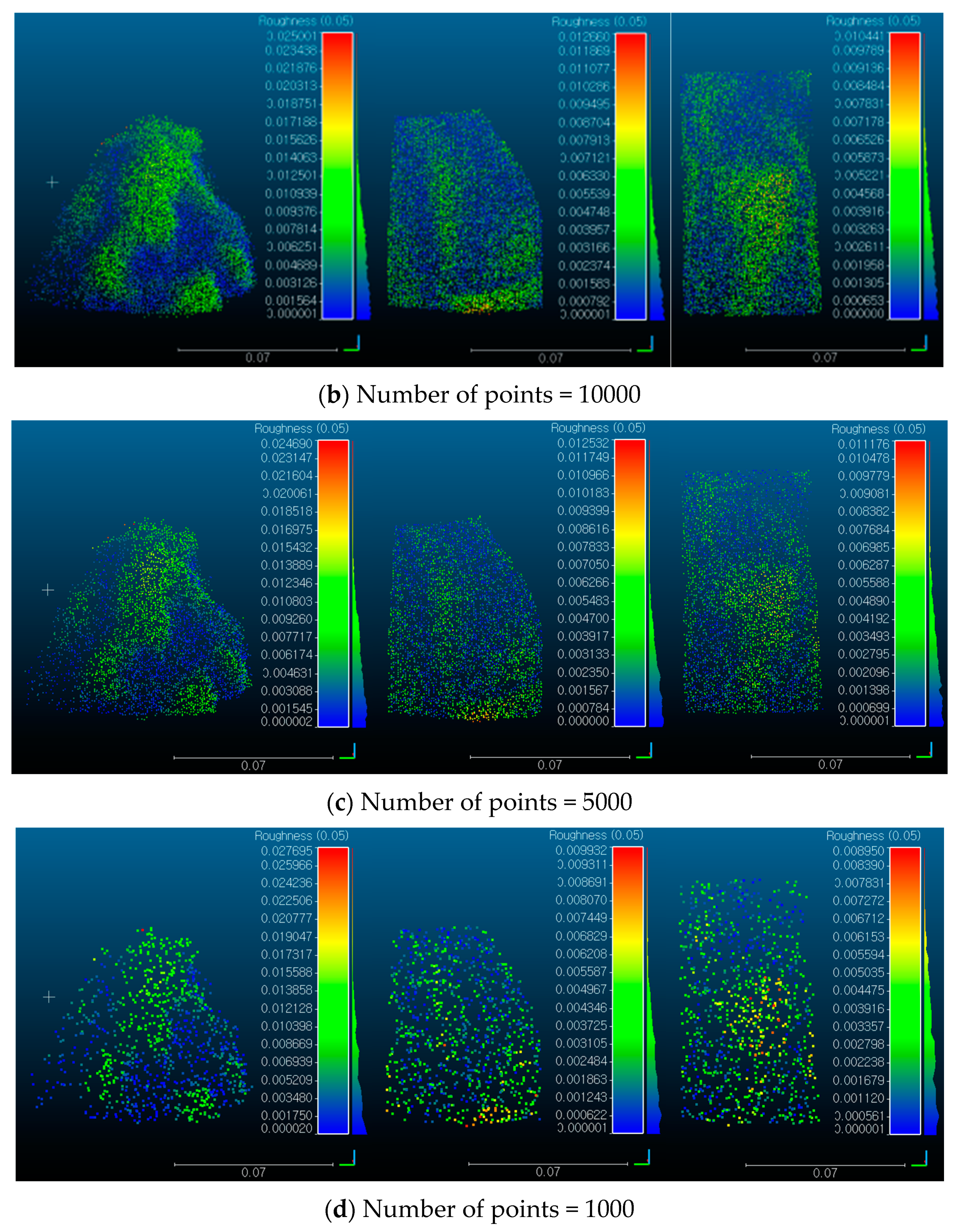
5.2. Analysis Results
5.3. Discussion
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Battista, N.D.; Kechavarzi, C.; Seo, H.; Soga, K.; Pennington, S. Distributed Fibre Optic Sensors for Measuring Strain and Temperature of Cast-in-situ Concrete Test Piles. In Proceedings of the International Conference on Smart Infrastructure and Construction Construction, Cambridge, UK, 27–29 June 2016. [Google Scholar]
- Bauret, S.; Rivard, P. Experimental Assessment of the Tensile Bond Strength of Mortar-Mortar Interfaces: Effects of Interface Roughness and Mortar Strength. Geotech. Test. J. 2018, 41, 1139–1146. [Google Scholar] [CrossRef]
- CLOUDCOMPARE. CloudCompare 2.9.1 ed. 2018. Available online: https://www.danielgm.net/cc/ (accessed on 17 March 2021).
- Farrell, E.R.; Lawler, M.L. CFA pile behaviour in very stiff lodgement till. Proc. Inst. Civ. Eng. Geotech. Eng. 2008, 161, 49–57. [Google Scholar] [CrossRef]
- Gavin, K.G.; Cadogan, D.; Casey, P. Shaft Capacity of Continuous Flight Auger Piles in Sand. J. Geotech. Geoenviron. Eng. 2009, 135, 790–798. [Google Scholar] [CrossRef]
- Hong, E.-S.; Lee, I.-M.; Lee, J.-S. Measurement of Rock Joint Roughness by 3D Scanner. Geotech. Test. J. 2006, 29, 482–489. [Google Scholar]
- Lee, D.-H.; Juang, C. A New Technique for Measuring the Roughness Profile of Rock Joints. Geotech. Test. J. 1991, 14, 320. [Google Scholar]
- Leznicki, J.K.; Esrig, M.I.; Gaibrois, R.G. Loss of Ground during CFA Pile Installation in Inner Urban Areas. J. Geotech. Eng. 1992, 118, 947–950. [Google Scholar] [CrossRef]
- Li, Y.; Mo, P.; Aydin, A.; Zhang, X. Spiral Sampling Method for Quantitative Estimates of Joint Roughness Coefficient of Rock Fractures. Geotech. Test. J. 2018, 42, 245–255. [Google Scholar] [CrossRef]
- Loveridge, F.; Cecinato, F. Thermal performance of thermoactive continuous flight auger piles. Environ. Geotech. 2016, 3, 265–279. [Google Scholar] [CrossRef]
- Pelecanos, L.; Soga, K.; Elshafie, M.Z.E.B.; Battista, N.; Kechavarzi, C.; Gue, C.Y.; Ouyang, Y.; Seo, H.J. Distributed Fibre Optic Sensing of Axially Loaded Bored Piles. J. Geotech. Geoenviron. Eng. 2018, 144, 1–16. [Google Scholar] [CrossRef]
- Rauthause, M.P.; Stuedlein, A.W.; Olsen, M.J. Quantification of Surface Roughness Using Laser Scanning with Application to the Frictional Resistance of Sand-Timber Pile Interfaces. Geotech. Test. J. 2020, 43, 966–984. [Google Scholar] [CrossRef]
- Seo, H. Monitoring of CFA pile test using three dimensional laser scanning and distributed fiber optic sensors. Opt. Lasers Eng. 2020, 130, 106089. [Google Scholar] [CrossRef]
- Seo, H. Long-term Monitoring of zigzag-shaped concrete panel in retaining structure using laser scanning and analysis of influencing factors. Opt. Lasers Eng. 2021, 139, 106498. [Google Scholar] [CrossRef]
- Seo, H.J.; Jeong, K.H.; Choi, H.S.; Lee, I.M. Pullout Resistance Increase of Soil Nailing Induced by Pressurized Grouting. J. Geotech. Geoenviron. Eng. 2012, 138, 604–613. [Google Scholar] [CrossRef]
- Seo, H.J.; Lee, I.M.; Lee, S.W. Optimization of Soil Nailing Design Considering Three Failure Modes. KSCE J. Civil Eng. 2014, 18, 488–496. [Google Scholar] [CrossRef]
- Seo, H.J.; Lee, I.M.; Ryu, Y.M.; Jung, J.H. Mechanical Behavior of Hybrid Soil Nail-Anchor System. KSCE J. Civil Eng. 2019, 23, 4201–4211. [Google Scholar] [CrossRef]
- Seo, H.J.; Pelecanos, L.; Kwon, Y.S.; Lee, I.M. Net Load-displacement Estimation in Soil-nailing Pullout Tests. Proc. Inst. Civil Eng. Geotech. Eng. 2017, 170, 534–547. [Google Scholar] [CrossRef]
- Seo, H.; Zhao, Y.; Wang, J. Monitoring of Retaining Structures on an Open Excavation Site with 3D Laser Scanning. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Cambridge, UK, 8–10 July 2019; ICE Publishing: London, UK, 2019; pp. 665–672. [Google Scholar]
- Sethy, B.P.; Patra, C.R.; Das, B.M.; Sobhan, K. Bearing Capacity of Circular Foundation on Sand Layer of Limited Thickness Underlain by Rigid Rough Base Subjected to Eccentrically Inclined Load. Geotech. Test. J. 2018, 42, 597–609. [Google Scholar] [CrossRef]
- Sobola, D.; Talu, S.; Sadovsky, P.; Papez, N.; Grmela, L. Application of AFM Measurement and Fractal Analysis to Study the Surface of Natural Optical Structures. Adv. Electr. Electron. Eng. 2017, 15, 569—576. [Google Scholar] [CrossRef]
- Soga, K.; Kwan, V.; Pelecanos, L.; Rui, Y.; Schwamb, T.; Seo, H.; Wilcock, M. The Role of Distributed Sensing in Understanding the Engineering Performance of Geotechnical Structures. In Proceedings of the 15th European Conference on Soil Mechanics and Geotechnical Engineering, Edinburgh, UK, 13–17 September 2015. [Google Scholar]
- Tehrani, F.S.; Han, F.; Salgado, R.; Prezzi, M.; Tovar, R.D.; Castro, A.G. Effect of surface roughness on the shaft resistance of non-displacement piles embedded in sand. Géotechnique 2016, 66, 386–400. [Google Scholar] [CrossRef]
- Tran, T.V.; Tucker-Kulesza, S.E.; Bernhardt-Barry, M.L. Determining Surface Roughness in Erosion Testing Using Digital Photogrammetry. Geotech. Test. J. 2017, 40, 20160277. [Google Scholar] [CrossRef]
- Wang, Z.; Gu, L.; Shen, M.; Zhang, F.; Zhang, G.; Deng, S. Influence of Shear Rate on the Shear Strength of Discontinuities with Different Joint Roughness Coefficients. Geotech. Test. J. 2019, 43, 683–700. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Points | Roughness, mm (95% of Points) | Error (%) | ||||
|---|---|---|---|---|---|---|
| Grouting | Sand | Gravel | Grouting | Sand | Gravel | |
| 135,000 | 5.73 | 5.94 | 12.09 | - | - | - |
| 100,000 | 5.75 | 5.94 | 12.02 | 0.4 | 0.0 | 0.6 |
| 10,000 | 5.76 | 6.06 | 11.88 | 0.5 | 2.0 | 1.8 |
| 5000 | 5.62 | 5.83 | 11.98 | 1.9 | 1.8 | 0.9 |
| 1000 | 5.50 | 5.91 | 12.38 | 4.0 | 0.4 | 2.3 |
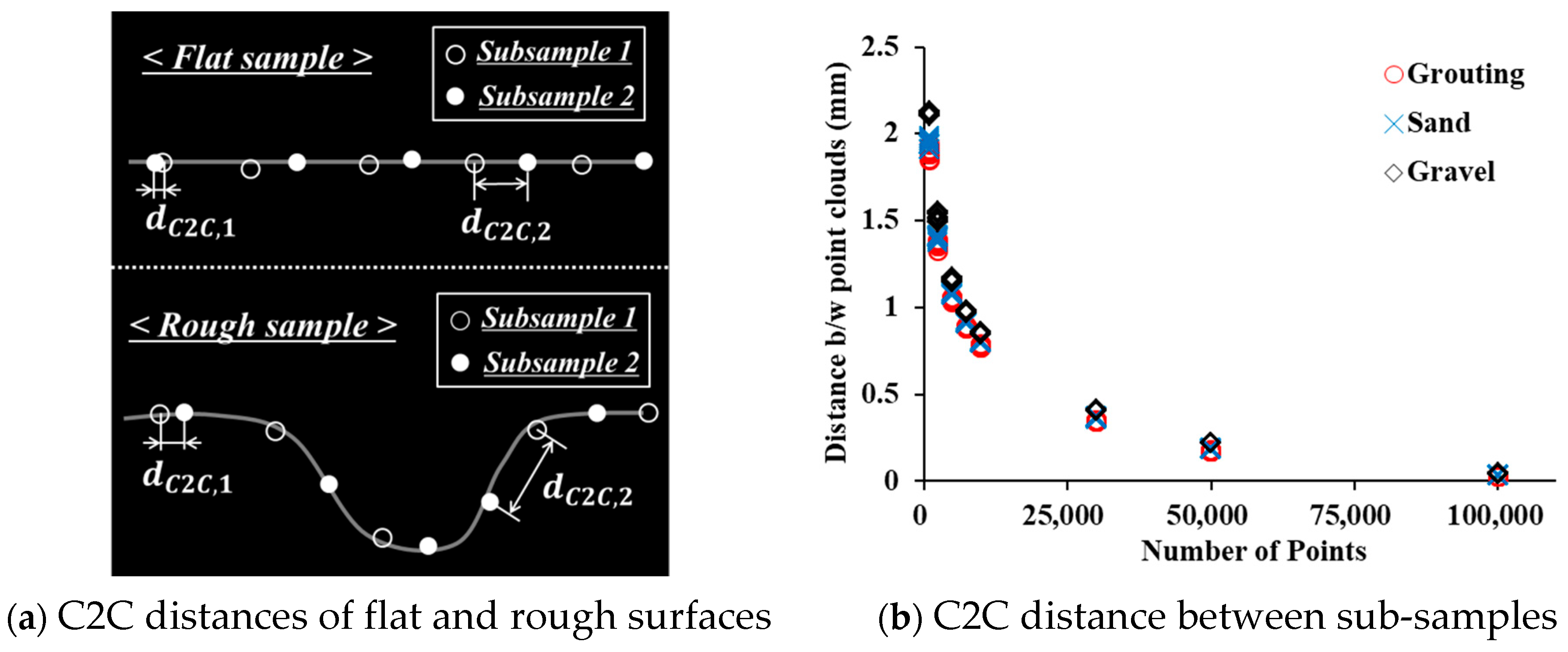
| No. of Points | Averaged C2C Distance (mm) | ||
|---|---|---|---|
| Grouting | Sand | Gravel | |
| 100,000 | 0.03 | 0.03 | 0.04 |
| 50,000 | 0.17 | 0.19 | 0.22 |
| 30,000 | 0.35 | 0.37 | 0.41 |
| 10,000 | 0.78 | 0.80 | 0.85 |
| 7500 | 0.89 | 0.92 | 0.98 |
| 5000 | 1.05 | 1.08 | 1.16 |
| 2500 | 1.37 | 1.40 | 1.53 |
| 1000 | 1.89 | 1.94 | 2.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seo, H. 3D Roughness Measurement of Failure Surface in CFA Pile Samples Using Three-Dimensional Laser Scanning. Appl. Sci. 2021, 11, 2713. https://doi.org/10.3390/app11062713
Seo H. 3D Roughness Measurement of Failure Surface in CFA Pile Samples Using Three-Dimensional Laser Scanning. Applied Sciences. 2021; 11(6):2713. https://doi.org/10.3390/app11062713
Chicago/Turabian StyleSeo, Hyungjoon. 2021. "3D Roughness Measurement of Failure Surface in CFA Pile Samples Using Three-Dimensional Laser Scanning" Applied Sciences 11, no. 6: 2713. https://doi.org/10.3390/app11062713
APA StyleSeo, H. (2021). 3D Roughness Measurement of Failure Surface in CFA Pile Samples Using Three-Dimensional Laser Scanning. Applied Sciences, 11(6), 2713. https://doi.org/10.3390/app11062713