
3D Texture Feature Extraction and Classification Using GLCM and LBP-Based Descriptors



Abstract
1. Introduction
2. Background
2.1. Local Binary Patterns (LBP)
2.2. Block Matching and 3D Filtering Extended Local Binary Patterns (BM3DELBP)
2.3. 2D Gray-Level Co-Occurrence Matrix (2D GLCM)
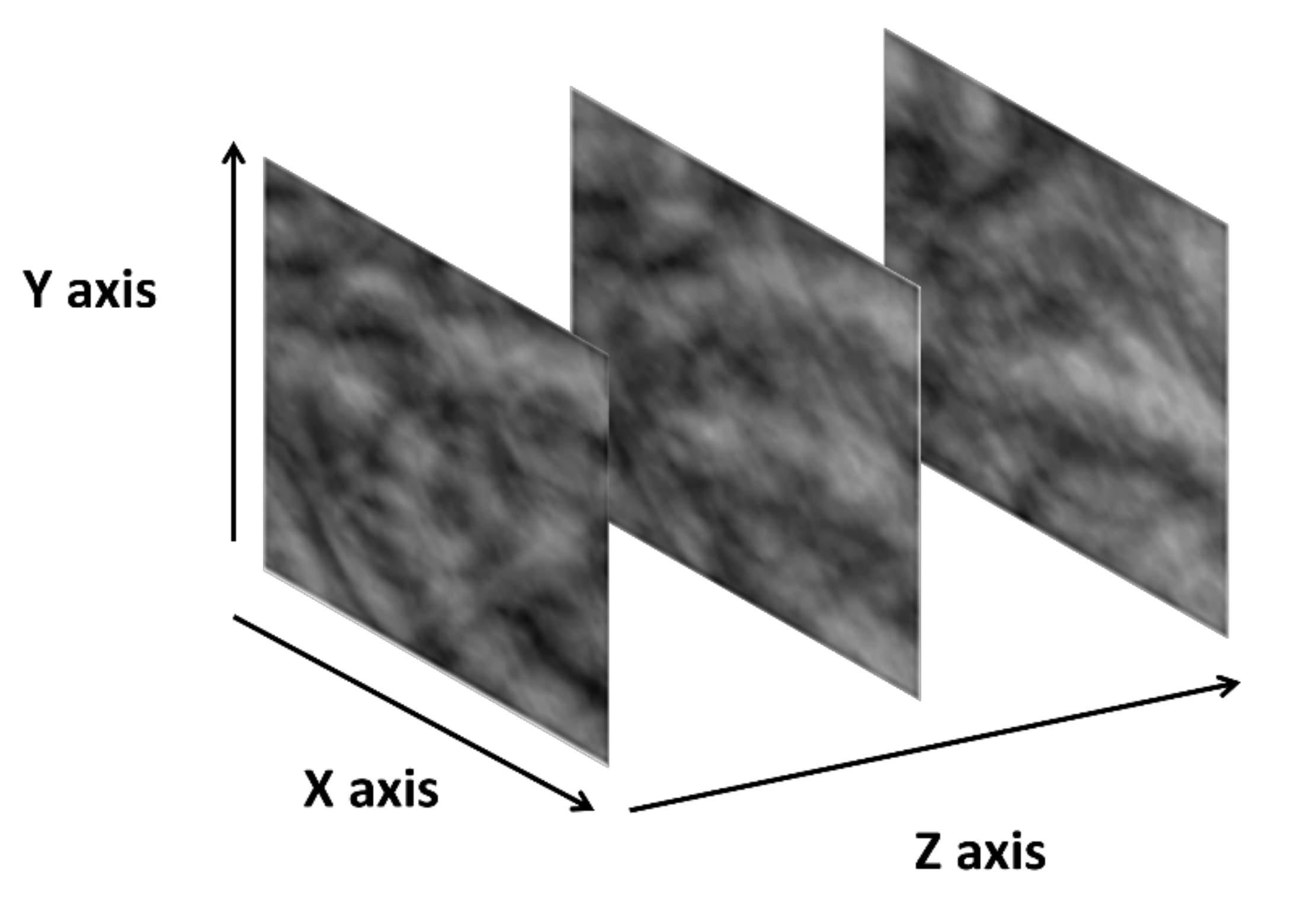
2.4. 3D Gray-Level Co-Occurrence Matrix (3D GLCM)
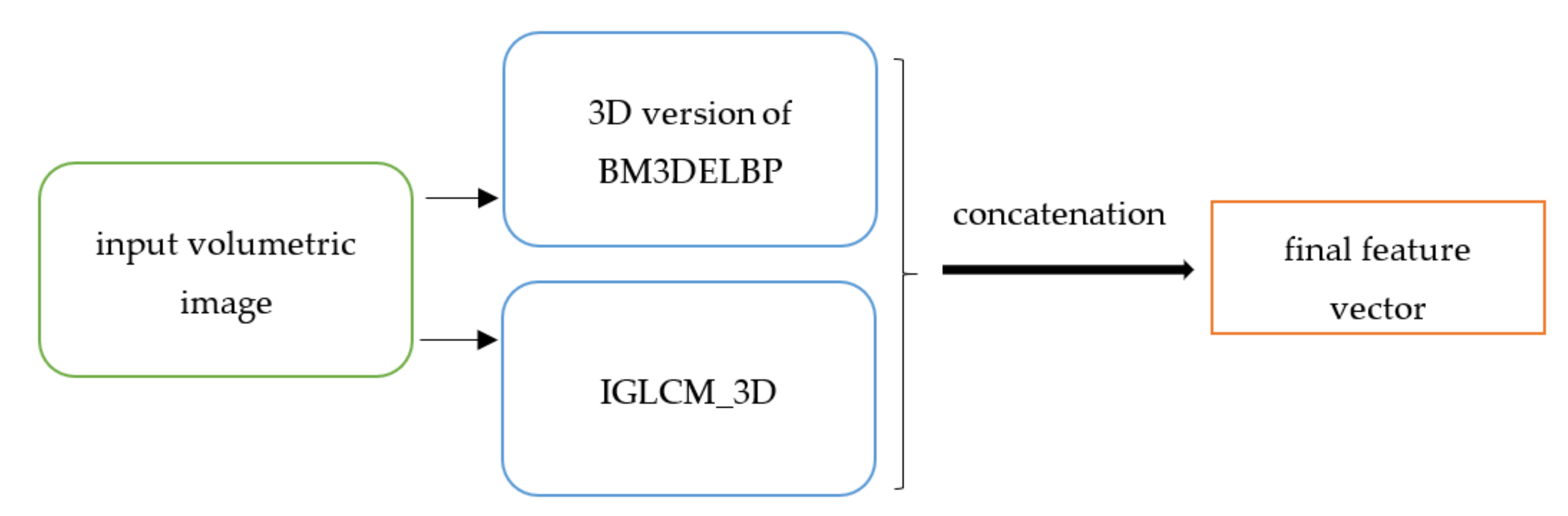
3. The Proposed Method
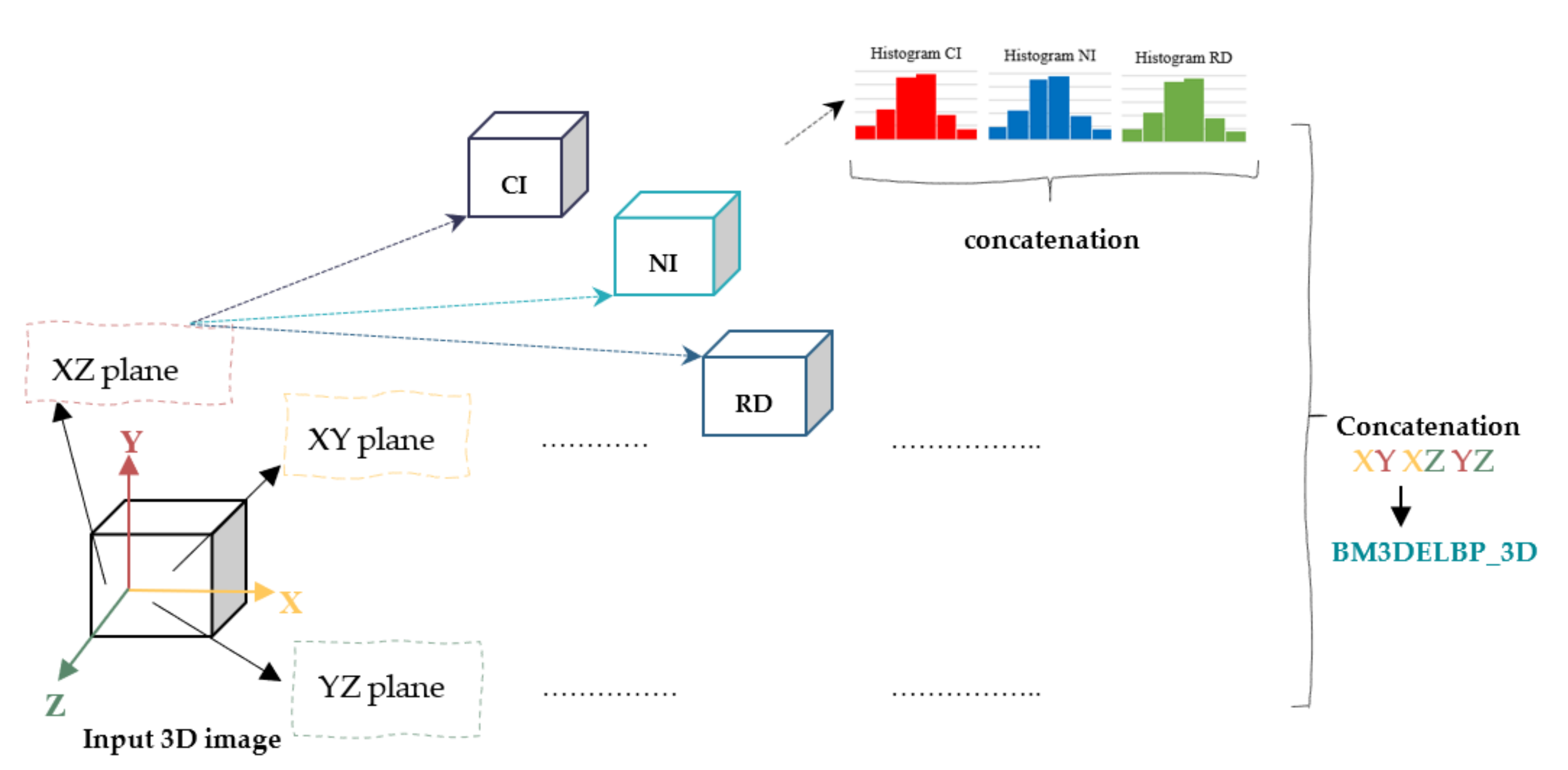
3.1. The Extension of BM3DELBP to 3D (BM3DELBP_3D)
3.2. The Improved 3D Gray-Level Co-Occurrence Matrix (IGLCM_3D)
3.2.1. Definition and Method Overview
3.2.2. Computation of the Haralick Feature Vector
3.2.3. Computation of the Three Gradient-Based Matrices and the Corresponding Feature Vectors
- Quantity of strong edges (Q):
- Slightly textured image indicator (STI):
- Uniformity (U):
- Strong edges indicator (S):
3.2.4. Final Feature Vector Computation
3.3. Fusion of the BM3DELBP_3D and IGLCM_3D Complementary Features
3.4. Invariance Properties of the Proposed Method
4. Experimental Setup
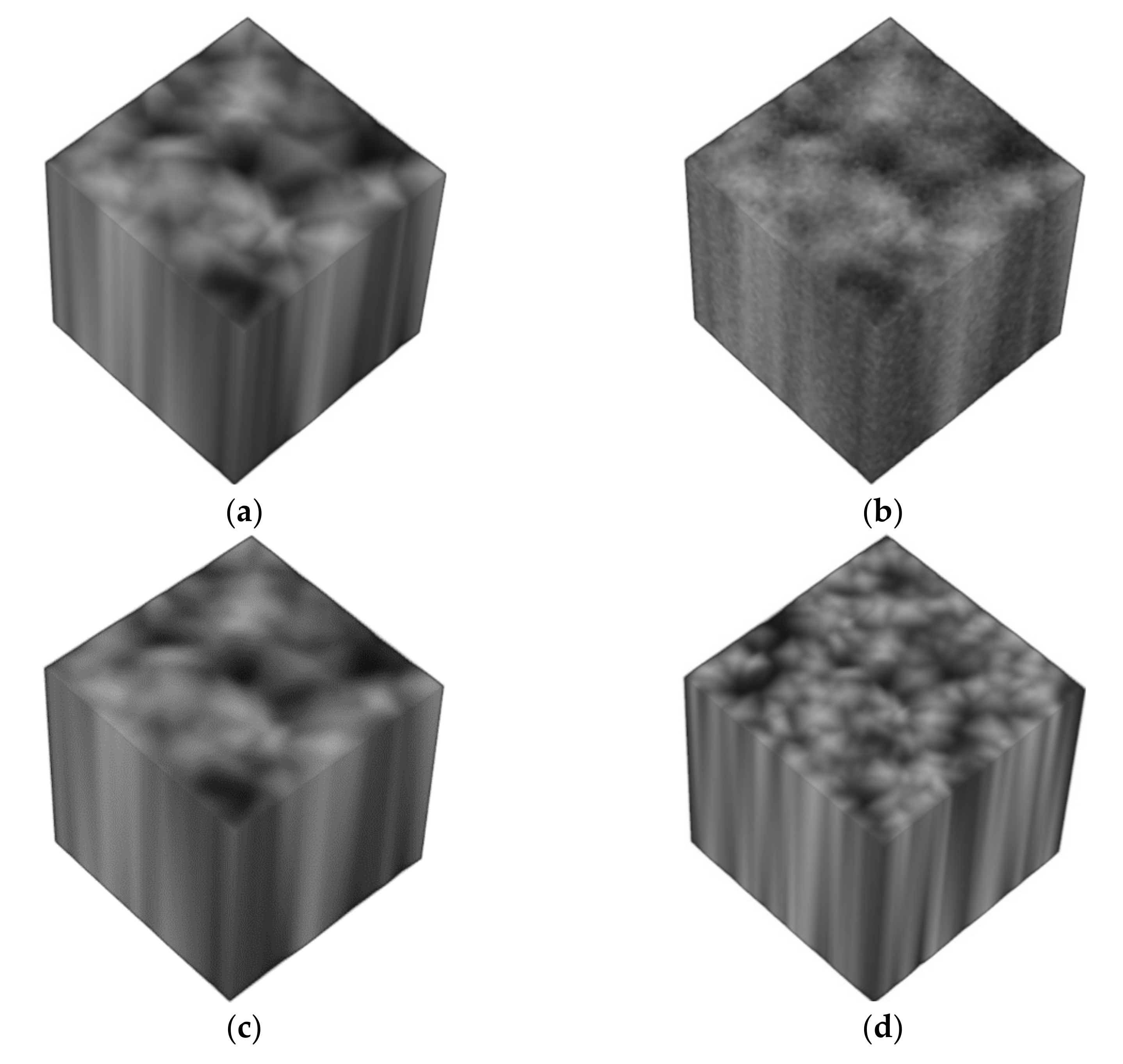
4.1. Dataset
4.2. Considered Methods in the Experimental Configuration
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Parameters for the Methods Considered in the Experimental Section
- 1.
- The extension of the BM3DELBP to 3D
- 2.
- 3D GLCM
- 3.
- IGLCM_3D
- 4.
- LBP_2D
- 5.
- CNN approach

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Layer Type | Kernel Size/Pool Size/Neurons | Stride | Number of Feature Maps | Output Size |
|---|---|---|---|---|---|
| 1 | Input | - | - | - | 64 × 64 × 64 × 1 |
| 2 | Convolutional 1 | 3 × 3 × 3 × 1 | [2 2 2] | 8 | 32 × 32 × 32 × 8 |
| 3 | Batch normalization | - | - | - | 32 × 32 × 32 × 8 |
| 4 | RELU | - | - | - | 32 × 32 × 32 × 8 |
| 5 | Max pooling 1 | 2 × 2 × 2 | [2 2 2] | - | 16 × 16 × 16 × 8 |
| 6 | Convolutional 2 | 5 × 5 × 5 × 8 | [2 2 2] | 16 | 8 × 8 × 8 × 16 |
| 7 | Batch normalization | - | - | - | 8 × 8 × 8 × 16 |
| 8 | RELU | - | - | - | 8 × 8 × 8 × 16 |
| 9 | Max pooling 2 | 2 × 2 × 2 | [2 2 2] | - | 4 × 4 × 4 × 16 |
| 10 | Fully connected | number of classes (9 or 95) | - | - | 1 × 1 × 1 × number of classes |
| 11 | Soft max | - | - | - | 1 × 1 × 1 × number of classes |
- 6.
- Proposed method
References
- Nath, S.S.; Mishra, G.; Kar, J.; Chakraborty, S.; Dey, N. A survey of image classification methods and techniques. In Proceedings of the 2014 International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kanyakumari District, India, 10–11 July 2014; pp. 554–557. [Google Scholar]
- Thakur, N.; Maheshwari, D. A review of image classification techniques. Int. Res. J. Eng. Technol. (IRJET) 2017, 4, 1588–1591. [Google Scholar]
- Humeau-Heurtier, A. Texture Feature Extraction Methods: A Survey. IEEE Access 2019, 7, 8975–9000. [Google Scholar] [CrossRef]
- Das, R. Content-Based Image Classification: Efficient Machine Learning Using Robust Feature Extraction Techniques; CRC Press: London, UK, 2020. [Google Scholar] [CrossRef]
- Yin, X.-X.; Yin, L.; Hadjiloucas, S. Pattern Classification Approaches for Breast Cancer Identification via MRI: State-Of-The-Art and Vision for the Future. Appl. Sci. 2020, 10, 7201. [Google Scholar] [CrossRef]
- Otesteanu, M.; Gui, V. 3D Image Sensors, an Overview. WSEAS Trans. Electron. 2008, 5, 53–56. [Google Scholar]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Paulhac, L.; Makris, P.; Ramel, J. Comparison between 2D and 3D Local Binary Pattern Methods for Characterisation of Three-Dimensional Textures. In Proceedings of the 5th International Conference, Image Analysis and Recognition, Lisbon, Portugal, 25–27 June 2008; Springer: Berlin/Heidelberg, Germany. [Google Scholar] [CrossRef]
- Citraro, L.; Mahmoodi, S.; Darekar, A.; Vollmer, B. Extended three-dimensional rotation invariant local binary patterns. Image Vis. Comput. 2017, 62, 8–18. [Google Scholar] [CrossRef][Green Version]
- Fehr, J.; Burkhardt, H. 3D Rotation Invariant Local Binary Patterns. Int. Conf. Pattern Recognit. 2008, 1–4. [Google Scholar] [CrossRef]
- Kurani, A.S.; Xu, D.-H.; Furst, J.; Raicu, D.S. Co-occurrence matrices for volumetric data. In Proceedings of the 7th IASTED International Conference on Computer Graphics and Imaging, Kauai, HI, USA, 17–19 August 2004. [Google Scholar]
- Xu, D.H.; Kurani, A.S.; Furst, J.D.; Raicu, D.S. Run-length encoding for volumetric texture. In 4th IASTED International Conference on Visualization, Imaging, and Image Processing; ACTA Press: Calgary, AB, Canada, 2004; pp. 6–8. [Google Scholar]
- Chen, W.; Giger, M.L.; Li, H.; Bick, U.; Newstead, G.M. Volumetric Texture Analysis of Breast Lesions on Contrast-Enhanced Magnetic Resonance Images. Magn. Reson. Med. 2007, 58, 562–571. [Google Scholar] [CrossRef]
- Kovalev, V.; Kruggel, F.; Gertz, H.-J.; Von Cramon, D. Three-dimensional texture analysis of MRI brain datasets. IEEE Trans. Med. Imaging 2001, 20, 424–433. [Google Scholar] [CrossRef]
- Reyes-Aldasoro, C.C.; Bhalerao, A. Volumetric Texture Classification and Discriminant Feature Selection for MRI. Proc. Inf. Process. Med. Imaging 2003, 2732, 282–293. [Google Scholar]
- Roy, S.S.; Rodrigues, N.; Taguchi, Y.-H. Incremental Dilations Using CNN for Brain Tumor Classification. Appl. Sci. 2020, 10, 4915. [Google Scholar] [CrossRef]
- Badža, M.M.; Barjaktarović, M.Č. Classification of Brain Tumors from MRI Images Using a Convolutional Neural Network. Appl. Sci. 2020, 10, 1999. [Google Scholar] [CrossRef]
- Cid, Y.D.; Muller, H.; Platon, A.; Poletti, P.-A.; Depeursinge, A. 3D Solid Texture Classification Using Locally-Oriented Wavelet Transforms. IEEE Trans. Image Process. 2017, 26, 1899–1910. [Google Scholar] [CrossRef]
- Almakady, Y.; Mahmoodi, S.; Conway, J.; Bennett, M. Volumetric Texture Analysis based on Three Dimensional Gaussian Markov Random Fields for COPD Detection. In Proceedings of the 22nd Conference of Medical Image Understanding and Analysis, Southampton, UK, 9–11 July 2018. [Google Scholar] [CrossRef]
- Jain, S.; Papadakis, M.; Upadhyay, S.; Azencott, R. Rigid-Motion-Invariant Classification of 3-D Textures. IEEE Trans. Image Process. 2012, 21, 2449–2463. [Google Scholar] [CrossRef] [PubMed]
- Ojala, T.; Pietikäinen, M.; Harwood, D. A comparative study of texture measures with classification based on featured distributions. Pattern Recognit. 1996, 29, 51–59. [Google Scholar] [CrossRef]
- Barburiceanu, S.R.; Meza, S.; Germain, C.; Terebes, R. An Improved Feature Extraction Method for Texture Classification with Increased Noise Robustness. In Proceedings of the 27th European Signal Processing Conference (EUSIPCO), A Coruna, Spain, 2–6 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, L.; Lao, S.; Fieguth, P.W.; Guo, Y.; Wang, X.; Pietikainen, M. Median Robust Extended Local Binary Pattern for Texture Classification. IEEE Trans. Image Process. 2016, 25, 1368–1381. [Google Scholar] [CrossRef] [PubMed]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image Denoising by Sparse 3-D Transform-Domain Collaborative Filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef]
- Burger, H.C.; Schuler, C.J.; Harmeling, S. Image denoising: Can plain neural networks compete with BM3D? In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 2392–2399. [Google Scholar] [CrossRef]
- Liu, L.; Zhao, L.; Long, Y.; Kuang, G.; Fieguth, P. Extended local binary patterns for texture classification. Image Vis. Comput. 2012, 30, 86–99. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man, Cybern. 1973, 3, 610–621. [Google Scholar] [CrossRef]
- Barburiceanu, S.; Terebes, R.; Meza, S. 3D Texture Feature Extraction and Classification using the BM3DELBP approach. In Proceedings of the 2020 IEEE 16th International Conference on Intelligent Computer Communication and Processing (ICCP), Cluj-Napoca, Romania, 3–5 September 2020. [Google Scholar] [CrossRef]
- Barburiceanu, S.; Terebes, R.; Meza, S. Improved 3D Co-Occurrence Matrix for Texture Description and Classification. In Proceedings of the International Symposium on Electronics and Telecommunications 2020 (ISETC), Timisoara, Romania, 5–6 November 2020. [Google Scholar] [CrossRef]
- Mathworks. Available online: https://www.mathworks.com/help/images/ref/imgradient3.html (accessed on 25 November 2020).
- Paulhac, L.; Makris, P.; Ramel, J.-Y. A Solid Texture Database for Segmentation and Classification Experiments. In Proceedings of the 4th International Conference on Computer Vision Theory and Applications, Lisboa, Portugal, 5–8 February 2009; pp. 135–141. [Google Scholar]
- Wagner, F.W.; Gryanik, A.; Schulzwendtland, R.; Fasching, P.A.; Wittenberg, T. 3D Characterization of Texture: Evaluation for the Potential Application in Mammographic Mass Diagnosis. Biomed. Tech. Eng. 2012, 57, 490–493. [Google Scholar] [CrossRef]
- Oshiro, T.; Perez, P.; Baranauskas, J. How Many Trees in a Random Forest? In International Workshop on Machine Learning and Data Mining in Pattern Recognition (MLDM 2012); Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7376. [Google Scholar] [CrossRef]
- Burges, C.J. A Tutorial on Support Vector Machines for Pattern Recognition. Data Min. Knowl. Discov. 1998, 2, 121–167. [Google Scholar] [CrossRef]

















| Direction | Displacement Vector |
|---|---|
| 0° | (distance 1, 0) |
| 45° | (distance, distance) |
| 90° | (0, distance) |
| 135° | (−distance, distance) |
| Displacement Vector |
|---|
| (distance 1, 0, distance) |
| (distance, 0, 0) |
| (distance,0, −distance) |
| (distance, distance, distance) |
| (distance, distance, 0) |
| (distance, distance, −distance) |
| (0, distance, distance) |
| (0, distance, 0) |
| (0, distance, −distance) |
| (−distance, distance, distance) |
| (−distance, distance, 0) |
| (−distance, distance, −distance) |
| (0, 0, distance) |
| Texture Class Name | The Number of Texture Samples Per Class |
|---|---|
| Blobs | 40 |
| Blocks | 40 |
| PerlinAmp | 40 |
| PerlinNoise | 40 |
| RidgedPerlin | 40 |
| SinusSynthesis | 40 |
| Stone | 40 |
| Uwari | 40 |
| Veins | 40 |
| Metric/Operator | Average Accuracy and Associated Standard Deviation | Macro-Averaging Precision and Associated Standard Deviation |
|---|---|---|
| 3D GLCM [11] | 74.01 ± 4.36 | 75.27 ± 4.5 |
| IGLCM_3D [29] | 86.44 ± 3.09 | 87.4 ± 3.24 |
| LBP_2D [8] | 78.02 ± 7.54 | 81.1 ± 6.6 |
| BM3DELBP_3D [28] | 94.2 ± 2.66 | 94.76 ± 2.32 |
| Typical CNN | 92.88 ± 3.1 | 93 ± 1.72 |
| Proposed method | 99.63 ± 0.63 | 99.67 ± 0.56 |
| Metric/Operator | Average Accuracy and Associated Standard Deviation | Macro-Averaging Precision and Associated Standard Deviation |
|---|---|---|
| 3D GLCM [11] | 67.73 ± 4.26 | 68.52 ± 4.80 |
| IGLCM_3D [29] | 73.24 ± 4.35 | 74.57 ± 4.37 |
| LBP_2D [8] | 75.36 ± 7.61 | 79.39 ± 6.24 |
| BM3DELBP_3D [28] | 77.29 ± 4.47 | 80.04 ± 4.45 |
| Proposed method | 89.20 ± 3.10 | 89.73 ± 3.31 |
| Metric/Operator | Average Accuracy and Associated Standard Deviation | Macro-Averaging Precision and Associated Standard Deviation |
|---|---|---|
| 3D GLCM [11] | 70.53 ± 4.63 | 71.83 ± 5.12 |
| IGLCM_3D [29] | 79.93 ± 4.27 | 80.97 ± 4.46 |
| LBP_2D [8] | 69.36 ± 8.41 | 74.73 ± 7.27 |
| BM3DELBP_3D [28] | 87.44 ± 3.35 | 88.33 ± 3.38 |
| Proposed method | 96.44 ± 1.96 | 96.72 ± 1.88 |
| Metric/Operator | Average Accuracy and Associated Standard Deviation | Macro-Averaging Precision and Associated Standard Deviation | Macro-Averaging Recall and Associated Standard Deviation |
|---|---|---|---|
| 3D GLCM [11] | 93.67 ± 0.57 | 94.04 ± 0.51 | 93.67 ± 0.57 |
| IGLCM_3D [29] | 95.44 ± 0.43 | 95.84 ± 0.4 | 95.44 ± 0.44 |
| LBP_2D [8] | 88.84 ± 1.03 | 89.9 ± 0.89 | 88.84 ± 1.03 |
| BM3DELBP_3D [28] | 96.86 ± 0.47 | 97.12 ± 0.42 | 96.86 ± 0.47 |
| Typical CNN | 75.04 ± 0.62 | 79.27 ± 1.02 | 75.08 ± 0.6 |
| Proposed method | 98.34 ± 0.36 | 98.51 ± 0.31 | 98.34 ± 0.36 |
| Metric/Operator | Average Accuracy and Associated Standard Deviation | Macro-Averaging Precision and Associated Standard Deviation | Macro-Averaging Recall and Associated Standard Deviation |
|---|---|---|---|
| 3D GLCM [11] | 86.61 ± 0.83 | 86.94 ± 0.96 | 86.61 ± 0.83 |
| IGLCM_3D [29] | 91.61 ± 0.78 | 92.18 ± 0.72 | 91.60 ± 0.78 |
| LBP_2D [8] | 82.63 ± 1.16 | 84.42 ± 1.16 | 82.63 ± 1.16 |
| BM3DELBP_3D [28] | 91.57 ± 0.72 | 92.41 ± 0.72 | 91.56 ± 0.72 |
| Proposed method | 93.98 ± 0.61 | 94.59 ± 0.60 | 93.97 ± 0.61 |
| Metric/Operator | Average Accuracy and Associated Standard Deviation | Macro-Averaging Precision and Associated Standard Deviation | Macro-Averaging Recall and Associated Standard Deviation |
|---|---|---|---|
| 3D GLCM [11] | 90.21 + −1.21 | 90.83 + −1.16 | 90.21 + −1.21 |
| IGLCM_3D [29] | 95.35 + −0.59 | 95.69 + −0.61 | 95.35 + −0.59 |
| LBP_2D [8] | 80.12 + −1.68 | 82.19 + −1.48 | 80.12 + −1.68 |
| BM3DELBP_3D [28] | 95.01 + −0.63 | 95.39 + −0.5 | 95.01 + −0.63 |
| Proposed method | 97.30 + −0.48 | 97.52 + −0.46 | 97.30 + −0.48 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barburiceanu, S.; Terebes, R.; Meza, S. 3D Texture Feature Extraction and Classification Using GLCM and LBP-Based Descriptors. Appl. Sci. 2021, 11, 2332. https://doi.org/10.3390/app11052332
Barburiceanu S, Terebes R, Meza S. 3D Texture Feature Extraction and Classification Using GLCM and LBP-Based Descriptors. Applied Sciences. 2021; 11(5):2332. https://doi.org/10.3390/app11052332
Chicago/Turabian StyleBarburiceanu, Stefania, Romulus Terebes, and Serban Meza. 2021. "3D Texture Feature Extraction and Classification Using GLCM and LBP-Based Descriptors" Applied Sciences 11, no. 5: 2332. https://doi.org/10.3390/app11052332
APA StyleBarburiceanu, S., Terebes, R., & Meza, S. (2021). 3D Texture Feature Extraction and Classification Using GLCM and LBP-Based Descriptors. Applied Sciences, 11(5), 2332. https://doi.org/10.3390/app11052332