Non-Invasive Testing of Physical Systems Using Topological Sensitivity





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Formulation of the Inverse Problem
3. Application to SHM Using Guided Lamb Waves
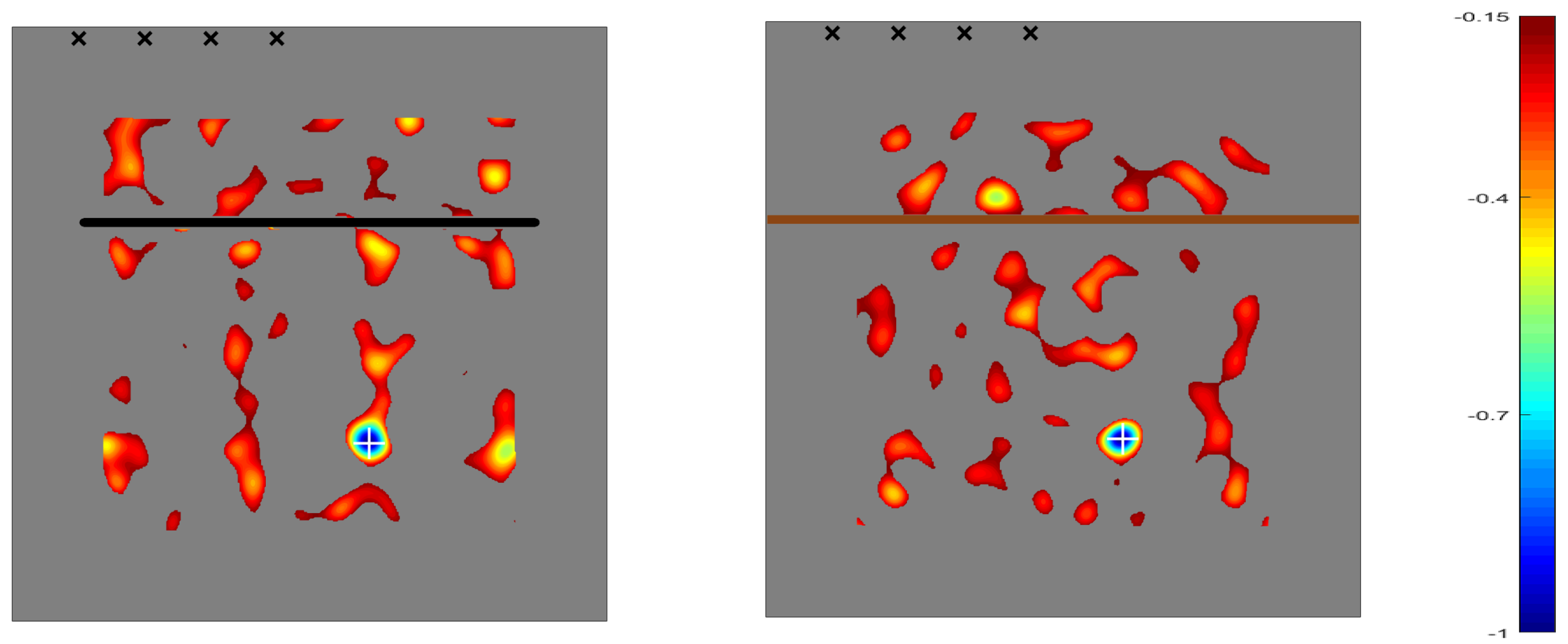
- Rectangular plates with constant thickness, but exhibiting either (i) an elongate through slit or (ii) an elongated inclusion of a different material, such as Titanium. Note that, in case (i), the through slit does not permit any transmission of the waves through it. Thus, the elongated slit cannot go from side to side transversally to the plate but should leave free portions of the plate at both sides of the slit. In case (ii), instead, the elongated inclusion permits partial transmission of the waves; thus, it can completely cover a section in the plate, from side to side. The elongated inclusion somewhat mimics the effect of stringers in the outer surface of aircraft wings. This application of topological sensitivity was performed in Reference [43], where it was seen that the method identifies defects, even in cases in which all emitters and receivers are at one side of the elongated artifact, while the defects are located at the other side.
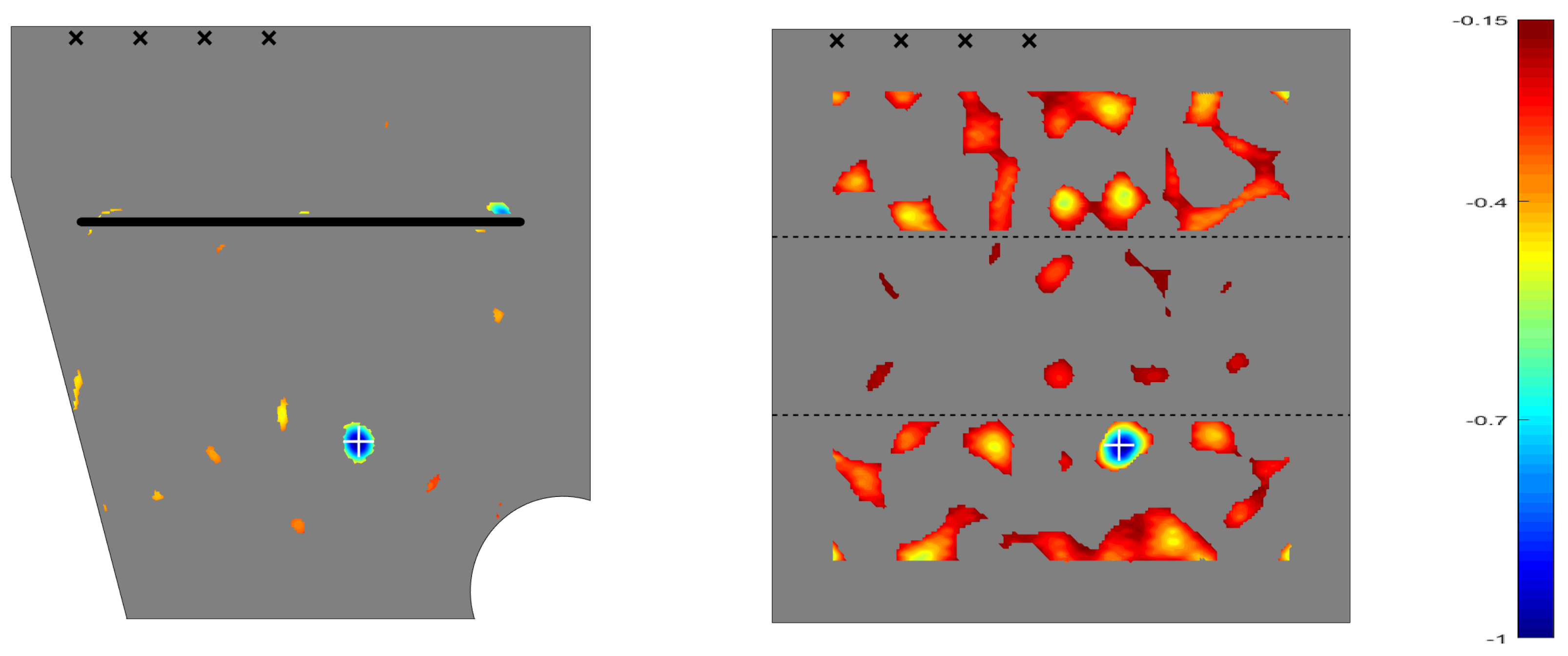
- Non-rectangular plates, exhibiting a complex planform or variable thickness. Difficulties for classical methods arise here from wave reflections in the boundaries and variable wave propagation speed (for guided waves) due to the variable thickness. This application was considered in Reference [44], where it was seen that, again, the method performs quite well.
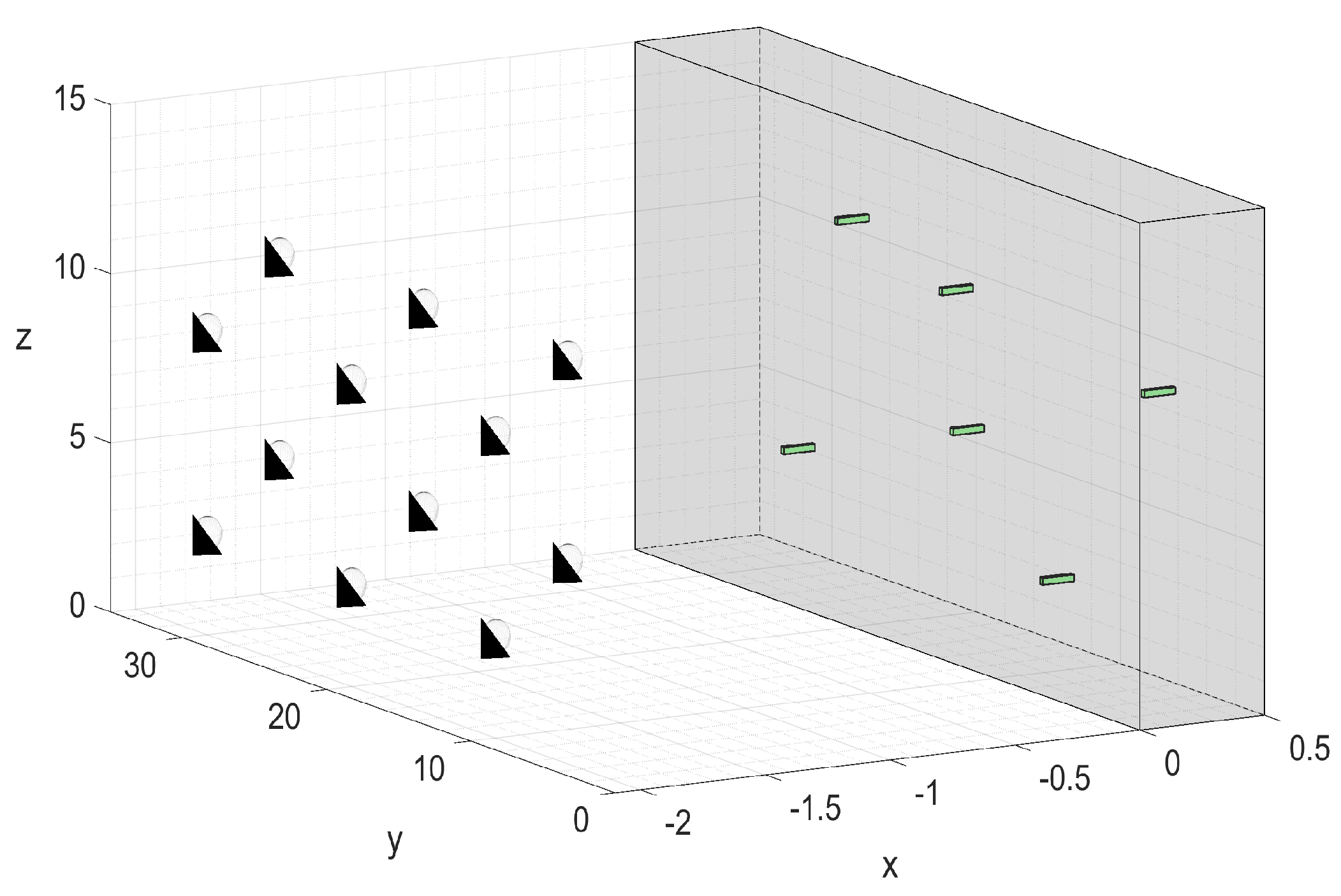
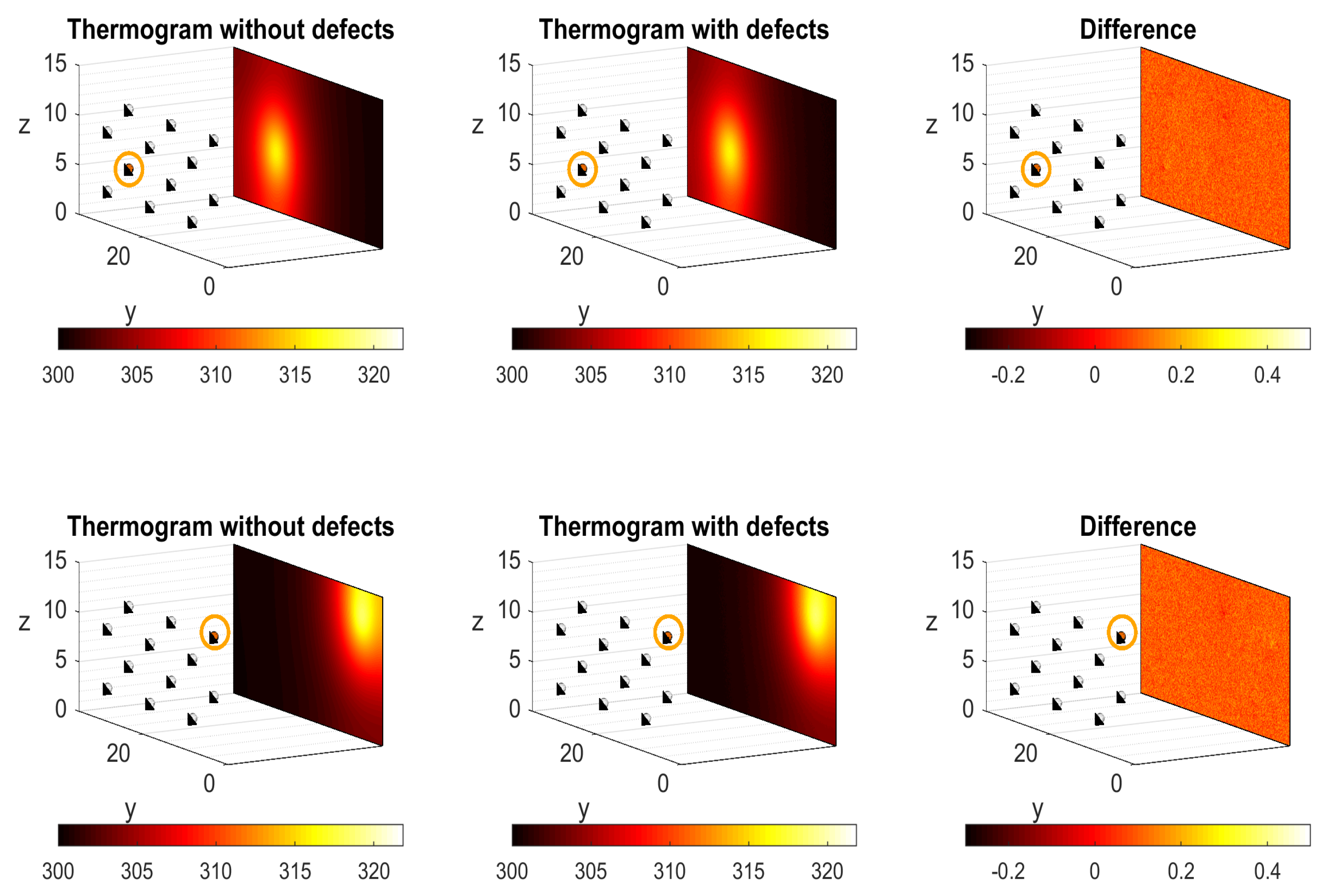
4. Application to SHM Using Infrared Thermography
- Precise modeling of the process, which is needed to solve the direct and adjoint problems, is problematic, specially in connection with modeling the lamps energy deposition.
- Experimental steady thermograms are difficult to obtain, specially due to the large thermal relaxation time needed to reach each steady state.
5. On Inverse Problems Associated with Diagnosis/Prognosis of Engineering Devices
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kac, M. Can one hear the shape of a drum? Am. Math. Mon. 1966, 73, 1–23. [Google Scholar] [CrossRef]
- Protter, M.H. Can one hear the shape of a drum? revisited. SIAM Rev. 1987, 29, 185–197. [Google Scholar] [CrossRef]
- Balageas, D.; Fritzen, C.P.; Güemes, J.A. Structural Health Monitoring; Wiley: Newport Beach, CA, USA; London, UK, 2010. [Google Scholar]
- Carpio, A.; Rapún, M.-L. Solving inhomogeneous inverse problems by topological derivative methods. Inverse Probl. 2008, 24, 045014. [Google Scholar] [CrossRef]
- Le Louër, F.; Rapún, M.-L. Detection of multiple impedance obstacles by non-iterative topological gradient based methods. J. Comput. Phys. 2019, 388, 534–560. [Google Scholar] [CrossRef]
- Le Louër, F.; Rapún, M.-L. Topological sensitivity for solving inverse multiple scattering problems in three-dimensional electromagnetism. Part I: One step method. SIAM J. Imaging Sci. 2017, 10, 1291–1321. [Google Scholar] [CrossRef]
- Le Louër, F.; Rapún, M.-L. Topological sensitivity for solving inverse multiple scattering problems in three-dimensional electromagnetism. Part II: Iterative method. SIAM J. Imaging Sci. 2018, 11, 734–769. [Google Scholar] [CrossRef]
- Larrabide, I.; Novotny, A.A.; Feijóo, R.A.; Taroco, E. A medical image enhancement algorithm based on topological derivative and anisotropic diffusion. In Proceedings of the XXVI Iberian Latin-American Congress on Comput, Methods in Engineering-CILAMCE Guarapari, Espirito Santo, Brazil, 19–21 October 2005; pp. 1–14. [Google Scholar]
- Meju, M.A. Geoelectromagnetic exploration for natural resources: Models, case studies and challenges. Surv. Geophys. 2002, 23, 133–205. [Google Scholar] [CrossRef]
- Scott, W.R.; Schroeder, C.T.; Martin, J.S.; Larson, G.D. Use of elastic waves for the detection of buried land mines. In Proceedings of the Geoscience and Remote Sensing Symposium, IGARSS′01, IEEE 2001 International, Sydney, Australia, 9–13 July 2001; Volume 3, pp. 1116–1118. [Google Scholar]
- Wunsch, C. The Ocean Circulation Inverse Problem; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Su, Z.; Ye, L.; Lu, Y. Guided Lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]
- Yan, F.; Boyer, F.L.; Rose, J.L. Ultrasonic guided wave imaging techniques in structural health monitoring. J. Intell. Mater. Syst. Struct. 2010, 21, 377–384. [Google Scholar] [CrossRef]
- Zhu, X.; Rizzo, P.; Marzani, A.; Bruck, J. Ultrasonic guided waves for nondestructive evaluation/structural health monitoring of trusses. Meas. Sci. Technol. 2010, 21, 045701. [Google Scholar] [CrossRef]
- Eschenauer, H.A.; Kobelev, V.; Schumacher, A. Bubble method for topology and shape optimization of structures. Struct. Optim. 1994, 8, 42–51. [Google Scholar] [CrossRef]
- Sokowloski, J.; Zochowski, A. On the topological derivative in shape optimization. SIAM J. Control Optim. 1999, 37, 1251–1272. [Google Scholar] [CrossRef]
- Ammari, H.; Garnier, J.; Jugnon, V.; Kang, H. Stability and resolution analysis for a topological derivative based imaging functional. SIAM J. Control Optim. 2012, 50, 48–76. [Google Scholar] [CrossRef]
- Carpio, A.; Johansson, B.T.; Rapún, M.-L. Determining planar multiple sound-soft obstacles from scattered acoustic fields. J. Math. Imaging Vis. 2010, 36, 185–199. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Topological derivatives for shape reconstruction. In Inverse Problems and Imaging, Lecture Notes in Mathematics; Springer: Berlin, Germany, 2008; pp. 85–134. [Google Scholar]
- Feijoo, G.R. A new method in inverse scattering based on the topological derivative. Inverse Probl. 2004, 20, 1819–1840. [Google Scholar] [CrossRef]
- Guzina, B.B.; Bonnet, M. Small-inclusion asymptotic of misfit functionals for inverse problems in acoustics. Inverse Probl. 2006, 22, 1761–1785. [Google Scholar] [CrossRef]
- Ammari, H.; Bretin, E.; Garnier, J.; Jing, W.; Kang, H.; Wahab, A. Localization, stability, and resolution of topological derivative based imaging functionals in elasticity. SIAM J. Imaging Sci. 2013, 50, 48–76. [Google Scholar]
- Bellis, C.; Bonnet, M. A fem-based topological sensitivity approach for fast qualitative identification of buried cavities from elastodynamic overdetermined boundary data. Int. J. Solids Struct. 2010, 47, 1221–1242. [Google Scholar] [CrossRef][Green Version]
- Bonnet, M.; Guzina, B.B. Sounding of finite solid bodies by way of topological derivative. Int. J. Numer. Meth. Eng. 2004, 61, 2344–2373. [Google Scholar] [CrossRef]
- Guzina, B.B.; Bonnet, M. Topological derivative for the inverse scattering of elastic waves. Q. J. Mech. Appl. Math. 2004, 57, 161–179. [Google Scholar] [CrossRef]
- Guzina, B.B.; Chikichev, I. From imaging to material identification: A generalized concept of topological sensitivity. J. Mech. Phys. Solids 2007, 55, 245–279. [Google Scholar] [CrossRef]
- Oberai, A.A.; Gokhale, N.H.; Feijoo, G.R. Solution of inverse problems in elasticity imaging using the adjoint method. Inverse Probl. 2003, 19, 297–313. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Domain reconstruction using photothermal techniques. J. Comput. Phys. 2008, 227, 8083–8106. [Google Scholar]
- Carpio, A.; Rapún, M.-L. Parameter identification in photothermal imaging. J. Math. Imaging Vis. 2014, 49, 273–288. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Hybrid topological derivative and gradient-based methods for electrical impedance tomography. Inverse Probl. 2012, 28, 095010. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Hybrid topological derivative-gradient based methods for nondestructive testing. Abstr. Appl. Anal. 2013, 2013, 816134. [Google Scholar] [CrossRef]
- Chaabane, S.; Masmoudi, M.; Meftahi, H. Topological and shape gradient strategy for solving geometrical inverse problems. J. Math. Anal. Appl. 2013, 400, 724–742. [Google Scholar] [CrossRef]
- Ferreira, A.D.; Novotny, A.A. A new non-iterative reconstruction method for the electrical impedance tomography problem. Inverse Probl. 2017, 33, 035005. [Google Scholar] [CrossRef]
- Hintermüller, M.; Laurain, A. Electrical impedance tomography: From topology to shape. Control Cybern. 2008, 37, 913–933. [Google Scholar]
- Ahn, C.Y.; Jeon, K.; Ma, Y.-K.; Park, W.-K. A study on the topological derivative-based imaging of thin electromagnetic inhomogeneities in limited-aperture problems. Inverse Probl. 2004, 30, 105004. [Google Scholar] [CrossRef]
- Masmoudi, M.; Pommier, J.; Samet, B. The topological asymptotic expansion for the Maxwell equations and some applications. Inverse Probl. 2005, 21, 547–564. [Google Scholar] [CrossRef]
- Park, W.-K. Topological derivative strategy for one-step iteration imaging of arbitrary shaped thin, curve-like electromagnetic inclusions. J. Comput. Phys. 2012, 231, 1426–1439. [Google Scholar] [CrossRef]
- Wahab, A. Stability and resolution analysis of topological derivative based localization of small electromagnetic inclusions. SIAM J. Imaging Sci. 2015, 8, 1687–1717. [Google Scholar] [CrossRef]
- Wahab, A.; Abbas, T.; Ahmed, N.; Zia, Q.M.Z. Detection of electromagnetic inclusions using topological sensitivity. J. Comput. Math. 2017, 35, 642–671. [Google Scholar] [CrossRef]
- Carpio, A.; Dimiduk, T.G.; Rapún, M.-L.; Selgas, V. Noninvasive imaging of three-dimensional micro and nanostructures by topological methods. SIAM J. Imaging Sci. 2016, 9, 1324–1354. [Google Scholar] [CrossRef]
- Carpio, A.; Dimiduk, T.G.; Le Louër, F.; Rapún, M.-L. When topological derivatives met regularized Gauss-Newton iterations in holographic 3D imaging. J. Comput. Phys. 2019, 388, 224–251. [Google Scholar] [CrossRef]
- Novotny, A.A.; Sokolowski, J.; Zochowski, A. Topological derivatives of shape functionals. Part II: First-order method and applications. J. Optim. Theory Appl. 2019, 180, 683–710. [Google Scholar] [CrossRef]
- Martinez, A.; Güemes, J.A.; Perales, J.M.; Vega, J.M. SHM via topological derivative. Smart Mater. Struct. 2018, 27, 085002. [Google Scholar]
- Martinez, A.; Güemes, J.A.; Perales, J.M.; Vega, J.M. Variable thickness in plates: A solution for SHM based on the topological derivative. Sensors 2020, 20, 2529. [Google Scholar] [CrossRef]
- Aubert, G.; Drogoul, A. Topological gradient for fourth-order PDE and application to the detection of fine structures in 2D images. R. Acad. Sci. Paris 2014, 352, 609–613. [Google Scholar] [CrossRef]
- Dominguez, N.; Gibiat, N. Non-destructive imaging using the time domain topological energy method. Ultrasonics 2010, 50, 367–372. [Google Scholar] [CrossRef] [PubMed]
- Tokmashev, R. Experimental Validation of the Topological Sensitivity Approach to Elastic-Wave Imaging. Ph.D. Thesis, University of Minnesota, Minneapolis, MN, USA, 2015. [Google Scholar]
- Tokmashev, R.; Tixier, A.; Guzina, B.B. Experimental validation of the topological sensitivity approach to elastic-wave imaging. Inverse Probl. 2013, 29, 125005. [Google Scholar] [CrossRef]
- Xavier, M.; Fancello, E.A.; Farias, J.M.C.; Van Goethem, N.; Novotny, A.A. Topological derivative-based fracture modelling in brittle materials: A phenomenological approach. Eng. Fract. Mech. 2017, 179, 13–27. [Google Scholar] [CrossRef]
- Yuang, H.; Guzina, B.B.; Chen, S.; Kinnick, R.; Fatemi, M. Application of topological sensitivity toward soft-tissue characterization from vibroacoustography measurements. J. Comput. Nonlinear Dyn. 2013, 8, 034503. [Google Scholar] [CrossRef]
- Rodriguez, S.; Veidt, M.; Castaings, M.; Ducasse, E.; Deschamps, M. One channel defect imaging in a reverberating medium. Appl. Phys. Lett. 2014, 105, 1–5. [Google Scholar] [CrossRef]
- Metwally, K.; Lubeigt, E.; Rakotonarivo, S.; Chaix, J.F.; Baqué, F.; Gobillot, G.; Mensah, S. Weld inspection by focused adjoint method. Ultrasonics 2018, 83, 80–88. [Google Scholar] [CrossRef]
- Ben Hassen, M.F.; Erhard, K.; Potthast, R. The point-source method for 3D reconstructions for the Helmholtz equation and Maxwell equations. Inverse Probl. 2006, 22, 331–353. [Google Scholar] [CrossRef]
- Cakoni, F.; Colton, D. Qualitative Methods in Inverse Scattering Theory: An Introduction; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Colton, D.; Kirsch, A. A simple method for solving inverse scattering problems in the resonance region. Inverse Probl. 1996, 12, 383–393. [Google Scholar] [CrossRef]
- Ikehata, M. Reconstruction of an obstacle from the scattering amplitude at a fixed frequency. Inverse Probl. 1998, 14, 949–954. [Google Scholar] [CrossRef]
- Kirsch, A. Characterization of the shape of a scattering obstacle using the spectral data of the far field operator. Inverse Probl. 1998, 14, 1489–1512. [Google Scholar] [CrossRef]
- Kirsch, A. The music algorithm and the factorization method in inverse scattering theory for inhomogeneous media. Inverse Probl. 2002, 18, 1025–1040. [Google Scholar] [CrossRef]
- Potthast, R. Stability estimates and reconstructions in inverse acoustic scattering using singular sources. J. Comput. Appl. Math. 2000, 114, 247–274. [Google Scholar] [CrossRef]
- Potthast, R. A study on orthogonality sampling. Inverse Probl. 2010, 26, 074015. [Google Scholar] [CrossRef]
- Dorn, O.; Lesselier, D. Level set methods for inverse scattering. Inverse Probl. 2006, 22, R67–R131. [Google Scholar] [CrossRef]
- Harbrecht, H.; Hohage, T. Fast methods for three-dimensional inverse obstacle scattering problems. J. Integral Equ. Appl. 2007, 19, 237–260. [Google Scholar] [CrossRef]
- Hettlich, F. Frechét derivatives in inverse obstacle scattering. Inverse Probl. 1995, 11, 371–382. [Google Scholar] [CrossRef]
- Ivanyshyn Yaman, O.; Le Louër, F. Material derivatives of boundary integral operators in electromagnetism and application to inverse scattering problems. Inverse Probl. 2016, 32, 095003. [Google Scholar] [CrossRef]
- Kirsch, A. The domain derivative and two applications in inverse scattering theory. Inverse Probl. 1993, 9, 81–96. [Google Scholar] [CrossRef]
- Kress, R. Newton’s method for inverse obstacle scattering meets the method of least squares. Inverse Probl. 2003, 19, 91–104. [Google Scholar] [CrossRef]
- Kress, R.; Rundell, W. A quasi-Newton method in inverse obstacle scattering. Inverse Probl. 1994, 10, 1145–1157. [Google Scholar] [CrossRef]
- Ferreira de Rezende, S.W.; Vieira de Moura, J.; Mendes Finzi Neto, R.; Gallo, C.A.; Steffen, V. Convolutional neural network and impedance-based SHM applied to damage detection. Eng. Res. Express 2020, 2, 035031. [Google Scholar] [CrossRef]
- Selva, P.; Cherrier, O.; Budinger, V.; Lachaud, F.; Morlier, J. Smart monitoring of aeronautical composites plates based on electromechanical impedance measurements and artificial neural network. Eng. Struct. 2013, 56, 794–804. [Google Scholar] [CrossRef]
- Sepehry, N.; Shamshirsaz, M.; Abdollahi, F. Temperature variation effect compensation in impedance-based structural health monitoring using neural networks. J. Intell. Mater. Syst. Struct. 2011, 22, 1975–1982. [Google Scholar] [CrossRef]
- Dung, C.V.; Anh, L.D. Autonomous concrete crack detection using deep fully convolutional neural network. Autom. Constr. 2019, 99, 52–58. [Google Scholar] [CrossRef]
- Ebrahimkhanlou, A.; Salamonte, S. Single-sensor acoustic emission source location in plate-like structures using deep learning. Aerospacecraft 2018, 5, 50. [Google Scholar] [CrossRef]
- Azimi, M.; Eslamlou, A.D.; Pekcan, G. Data-driven structural health monitoring and damage detection through deep learning: State-of-the-art review. Sensors 2020, 20, 2778. [Google Scholar] [CrossRef] [PubMed]
- Yuan, F.-G.; Zargar, A.; Chen, K.; Wang, S. Machine learning for structural health monitoring: Challenges and opportunities. In Proceedings of the SPIE 11379, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2020, Bellingham, WA, USA, 27 April–8 May 2020. [Google Scholar]
- Seventekidis, P.; Giagopoulos, D.; Arailopous, A.; Markogiannaki, O. Structural health monitoring using deep learning with optimal finite element model generated data. Mech. Syst. Signal Process. 2020, 145, 106972. [Google Scholar] [CrossRef]
- Fletcher, R. Practical Methods of Optimization; Wiley: Hoboken, NJ, USA, 1987. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer: New York, NY, USA, 2006. [Google Scholar]
- Giles, M.B.; Pierce, N.A. An introduction to the adjoint approach to design. Flow Turbul. Combust. 2000, 65, 393–415. [Google Scholar] [CrossRef]
- Funes, J.F.; Perales, J.M.; Rapún, M.-L.; Vega, J.M. Defect detection from multi-frequency limited data via topological sensitivity. J. Math. Imaging Vis. 2016, 55, 19–35. [Google Scholar] [CrossRef]
- Royer, D.; Noroy, M.H.; Fink, M. Optical generation and detection of elastic waves in solids. J. Phys. IV 1994, 4, 673–683. [Google Scholar] [CrossRef]
- Higuera, M.; Perales, J.M.; Rapún, M.-L.; Vega, J.M. Solving inverse geometry heat conduction problems by postprocessing steady thermograms. Int. J. Heat Mass Transf. 2019, 143, 118490. [Google Scholar] [CrossRef]
- Pena, M.; Rapún, M.-L. Detecting damage in thin plates by processing infrared thermographic data with topological derivatives. Adv. Math. Phys. 2019, 2019, 5494795. [Google Scholar] [CrossRef]
- Pena, M.; Rapún, M.-L. Application of the topological derivative to post-processing infrared time-harmonic thermograms for defect detection. J. Math. Ind. 2020, 10, 4. [Google Scholar] [CrossRef]
- Ciampa, F.; Mahmoodi, P.; Pinto, F.; Meo, M. Recent advances in active infrared thermography for non-destructive testing of aerospace components. Sensors 2018, 18, 609. [Google Scholar] [CrossRef] [PubMed]
- Cramer, K.E.; Howell, P.A.; Syed, H.I. Quantitative thermal imaging of aircraft structures. Proc. SPIE Thermosense XVII 1995, 2473, 226232. [Google Scholar]
- Kandlikar, S.G.; Perez-Raya, I.; Raghupathi, P.A.; Gonzalez-Hernandez, J.L.; Dabydeen, D.; Medeiros, L.; Phatak, P. Infrared imaging technology for breast cancer detection—Current status, protocols and new directions. Int. J. Heat Mass Transf. 2017, 108, 2303–2320. [Google Scholar] [CrossRef]
- Ring, E.F.J.; Ammer, K. Infrared thermal imaging in medicine. Physiol. Meas. 2012, 33, R33–R46. [Google Scholar] [CrossRef] [PubMed]
- Le Clainche, S.; Vega, J.M. Higher order dynamic mode decomposition. SIAM J. Appl. Dyn. Syst. 2017, 16, 882–925. [Google Scholar] [CrossRef]
- Vega, J.M.; Le Clainche, S. Higher Order Dynamic Mode Decomposition and Its Applications; Academic Press Cambridge: Cambridge, MA, USA, 2020. [Google Scholar]
- Schmid, P.J.; Sesterhenn, J.L. Dynamic Mode Decomposition of numerical and experimental data. In Proceedings of the American Physical Society, 61st APS Meeting, San Antonio, CA, USA, 23–25 November 2008; p. 208. [Google Scholar]
- Schmid, P.J. Dynamic mode decomposition of numerical and experimental data. J. Fluid Mech. 2010, 656, 5–28. [Google Scholar] [CrossRef]
- Song, Y. A review of developments of EEG-based automatic medical support systems for epilepsy diagnosis and seizure detection. J. Biomed. Sci. Eng. 2011, 4, 788–796. [Google Scholar] [CrossRef][Green Version]
- Garcia-Crespo, A.; Alonso-Hernandez, G.; Battistella, L.; Rodriguez-Gonzalez, A. Methods and models for diagnosis and prognosis in medical systems. Comput. Math. Meth. Med. 2013, 2013, 184257. [Google Scholar] [CrossRef] [PubMed]
- Urban, L. Gas path analysis applied to turbine engine condition monitoring. J. Aircr. 1973, 10, 400–406. [Google Scholar] [CrossRef]
- Goriveau, R.; Medjaher, K.; Zerhouni, N. From Prognostics and Health Systems Management to Predictive Maintenance 1: Monitoring and Prognostics; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- EcosimPro Proosis. Available online: https://www.ecosimpro.com/ (accessed on 29 November 2020).
- Sanchez de León, L.; Rodrigo, J.; Vega, J.M.; Montañés, J.L. Gradient-like minimization methods for aeroengines diagnosis and control. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020. [Google Scholar] [CrossRef]
- Rodrigo, J.; Sánchez de León, L.; Montañés, J.L.; Vega, J.M. An efficient method for performing aeroengines diagnosis. Preprint 2020. submitted. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Higuera, M.; Perales, J.M.; Rapún, M.-L.; Vega, J.M. Non-Invasive Testing of Physical Systems Using Topological Sensitivity. Appl. Sci. 2021, 11, 1341. https://doi.org/10.3390/app11031341
Higuera M, Perales JM, Rapún M-L, Vega JM. Non-Invasive Testing of Physical Systems Using Topological Sensitivity. Applied Sciences. 2021; 11(3):1341. https://doi.org/10.3390/app11031341
Chicago/Turabian StyleHiguera, María, José M. Perales, María-Luisa Rapún, and José M. Vega. 2021. "Non-Invasive Testing of Physical Systems Using Topological Sensitivity" Applied Sciences 11, no. 3: 1341. https://doi.org/10.3390/app11031341
APA StyleHiguera, M., Perales, J. M., Rapún, M.-L., & Vega, J. M. (2021). Non-Invasive Testing of Physical Systems Using Topological Sensitivity. Applied Sciences, 11(3), 1341. https://doi.org/10.3390/app11031341