
Gear Shift Coordinated Control Strategy Based on Motor Rotary Velocity Regulation for a Novel Hybrid Electric Vehicle




Abstract
:1. Introduction
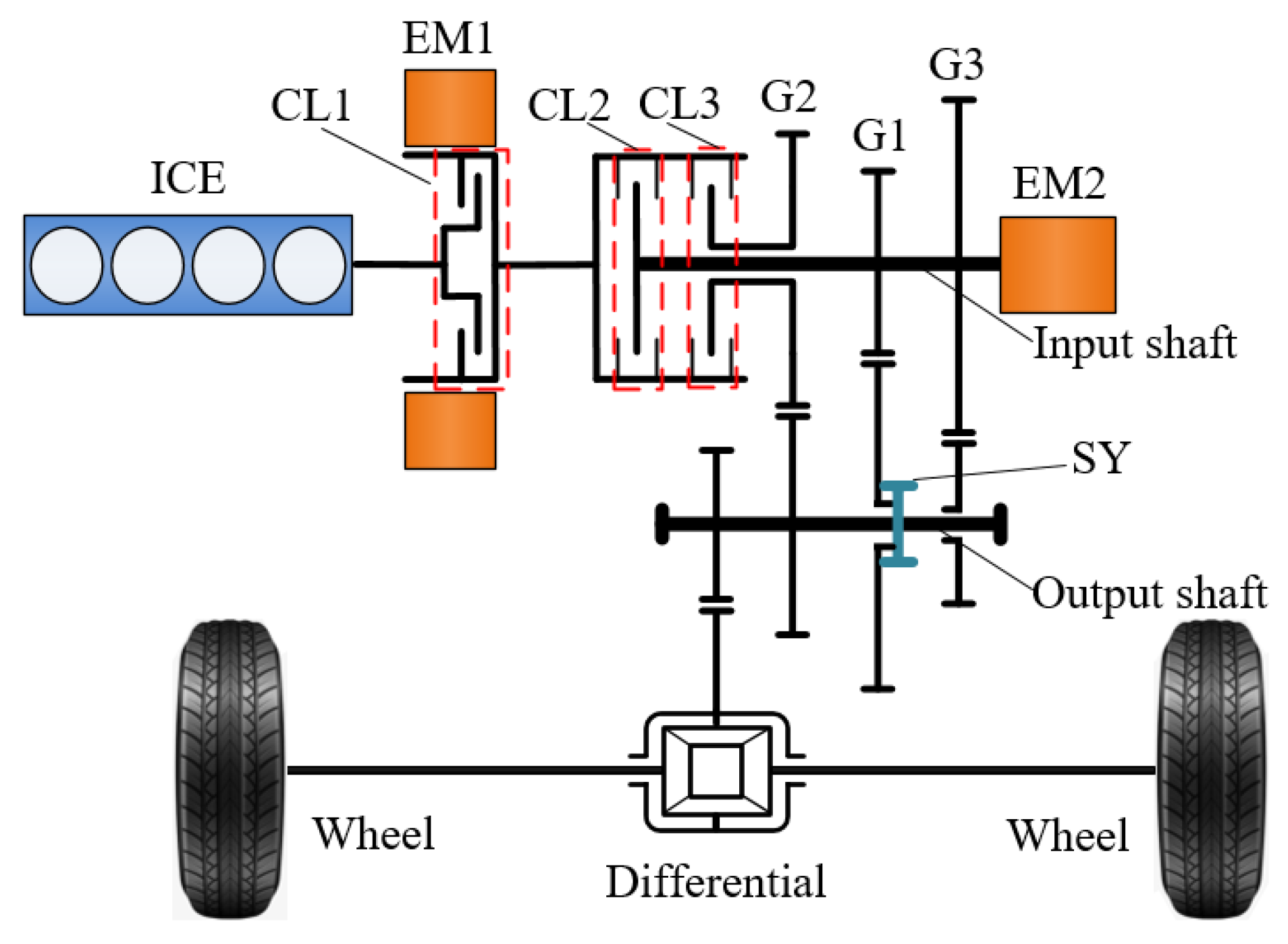
2. Configuration and Working Principles of Novel HEV
3. Modeling of Powertrain System
3.1. Motor Model
3.1.1. Motor Dynamic Torque
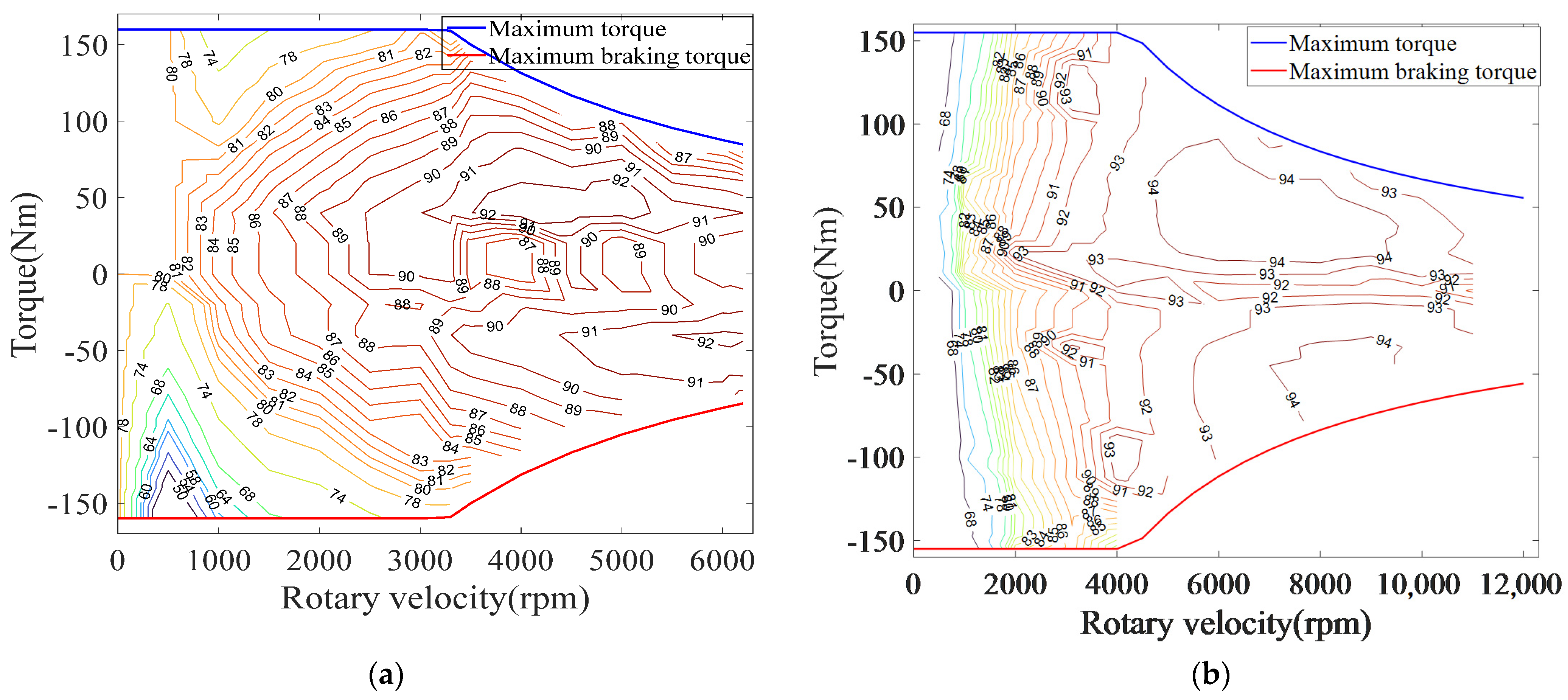
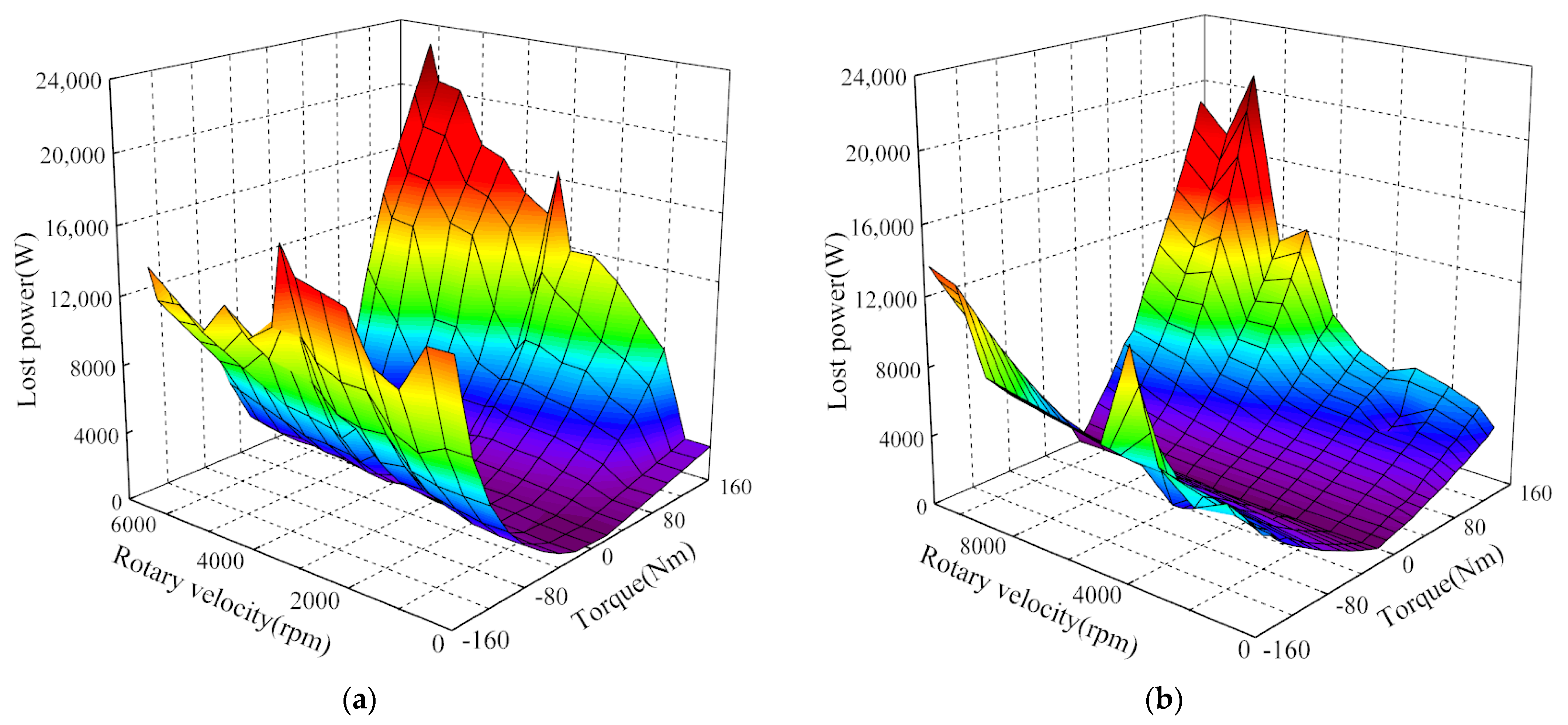
3.1.2. Motor Efficiency
3.2. Wet Clutch Model
3.3. Vehicle Longitudinal Dynamics Model
3.4. Model Validation
4. Method Analysis and Control Strategy Development
4.1. Motor Rotary Velocity Regulation Control Algorithm
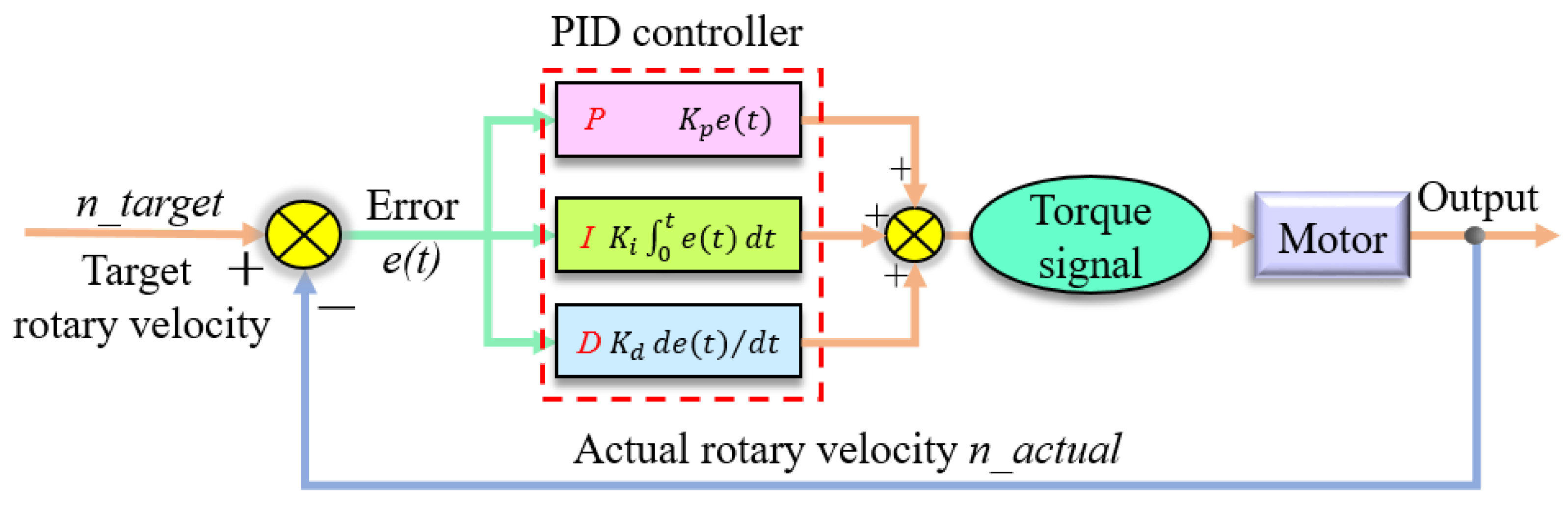
4.1.1. PID Algorithm
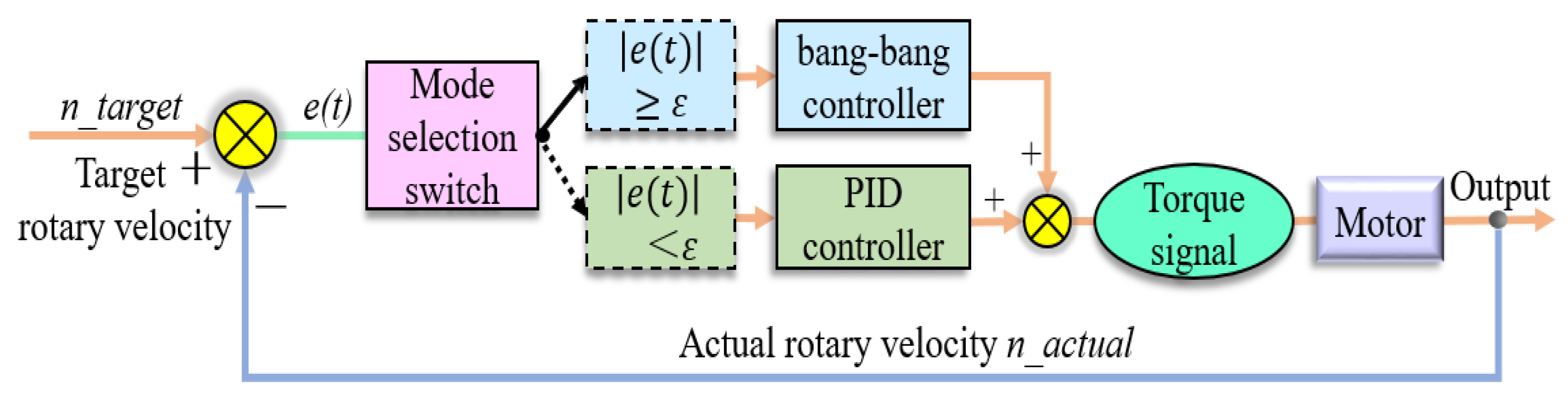
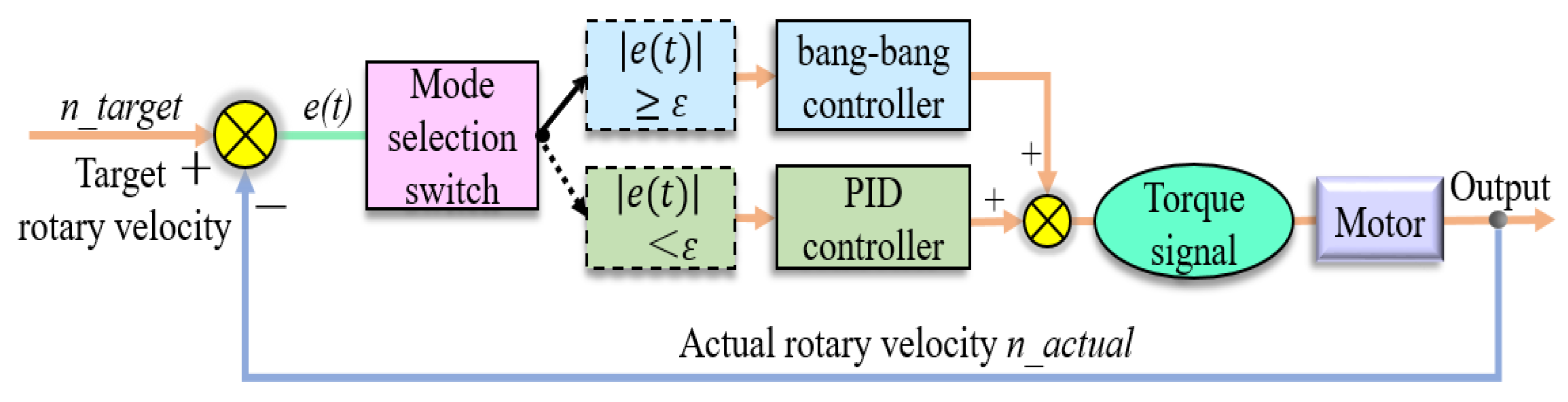
4.1.2. PID–Bang-Bang Compound Algorithm
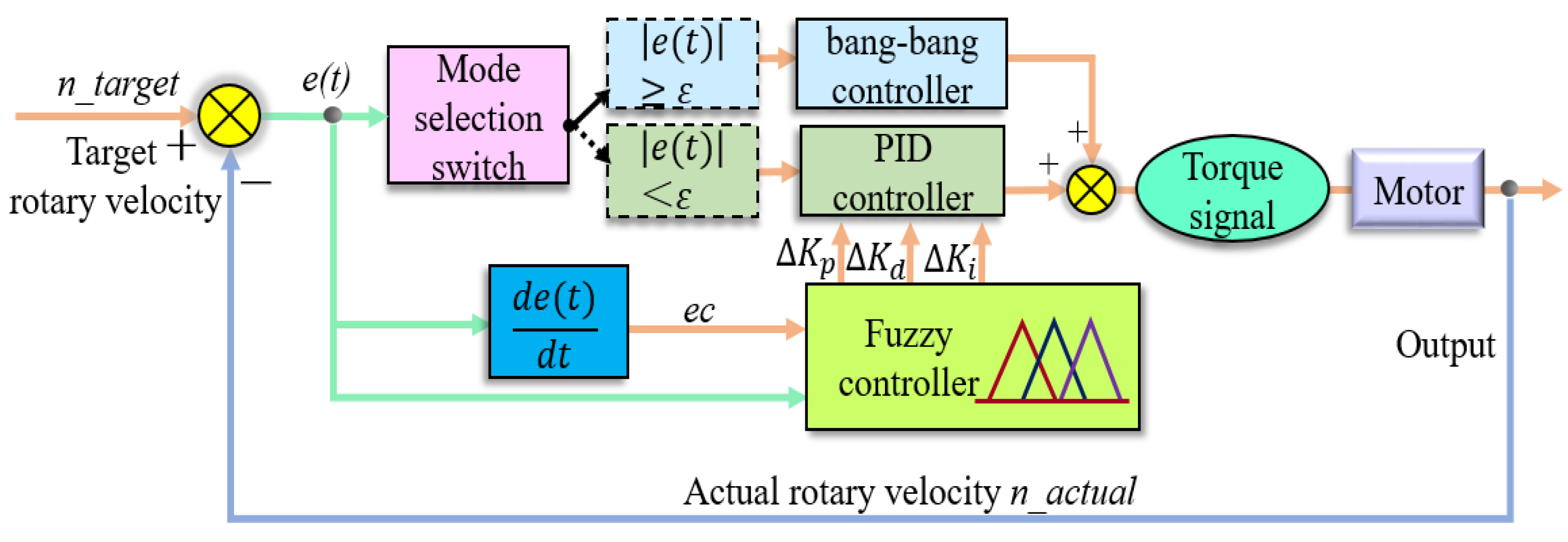
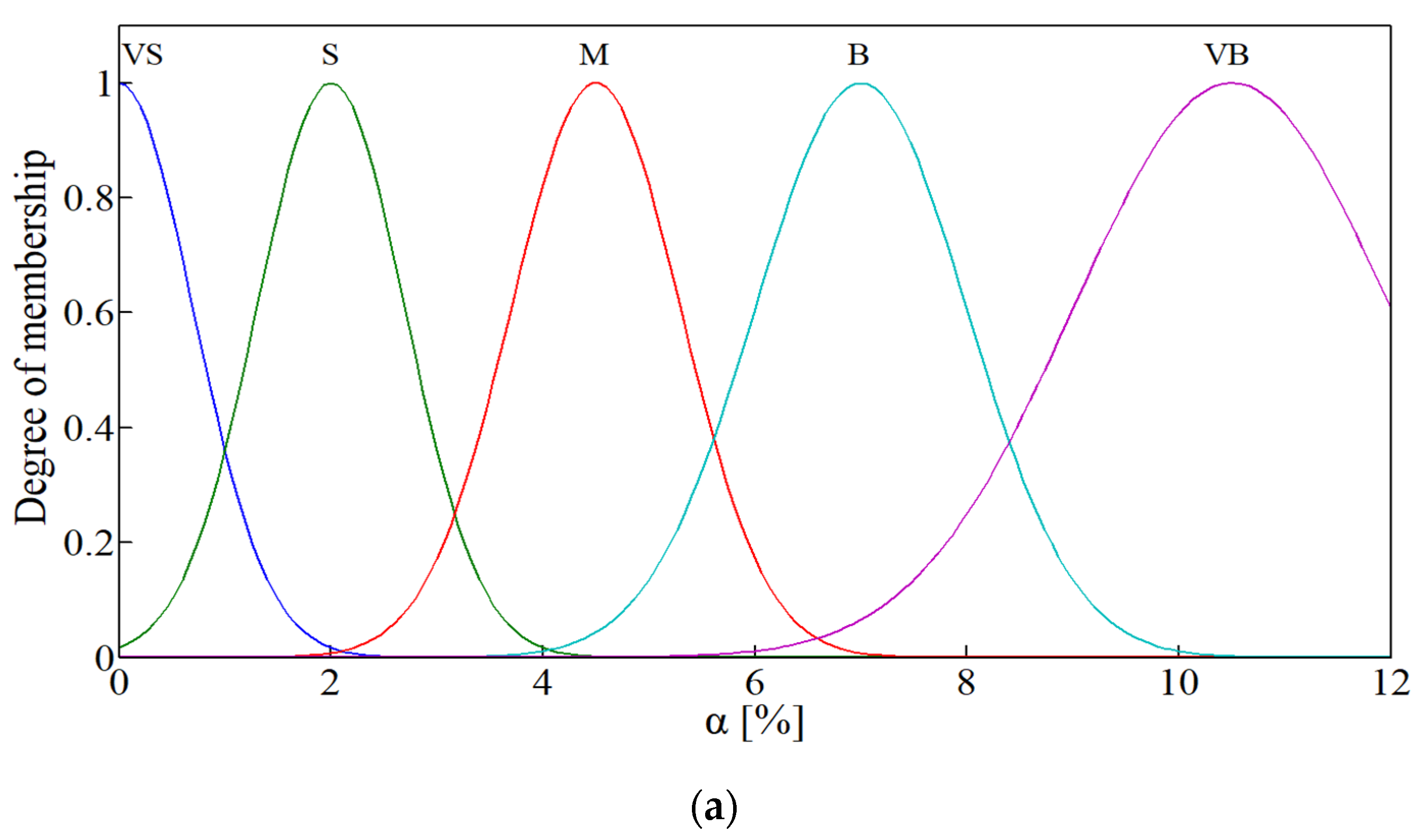
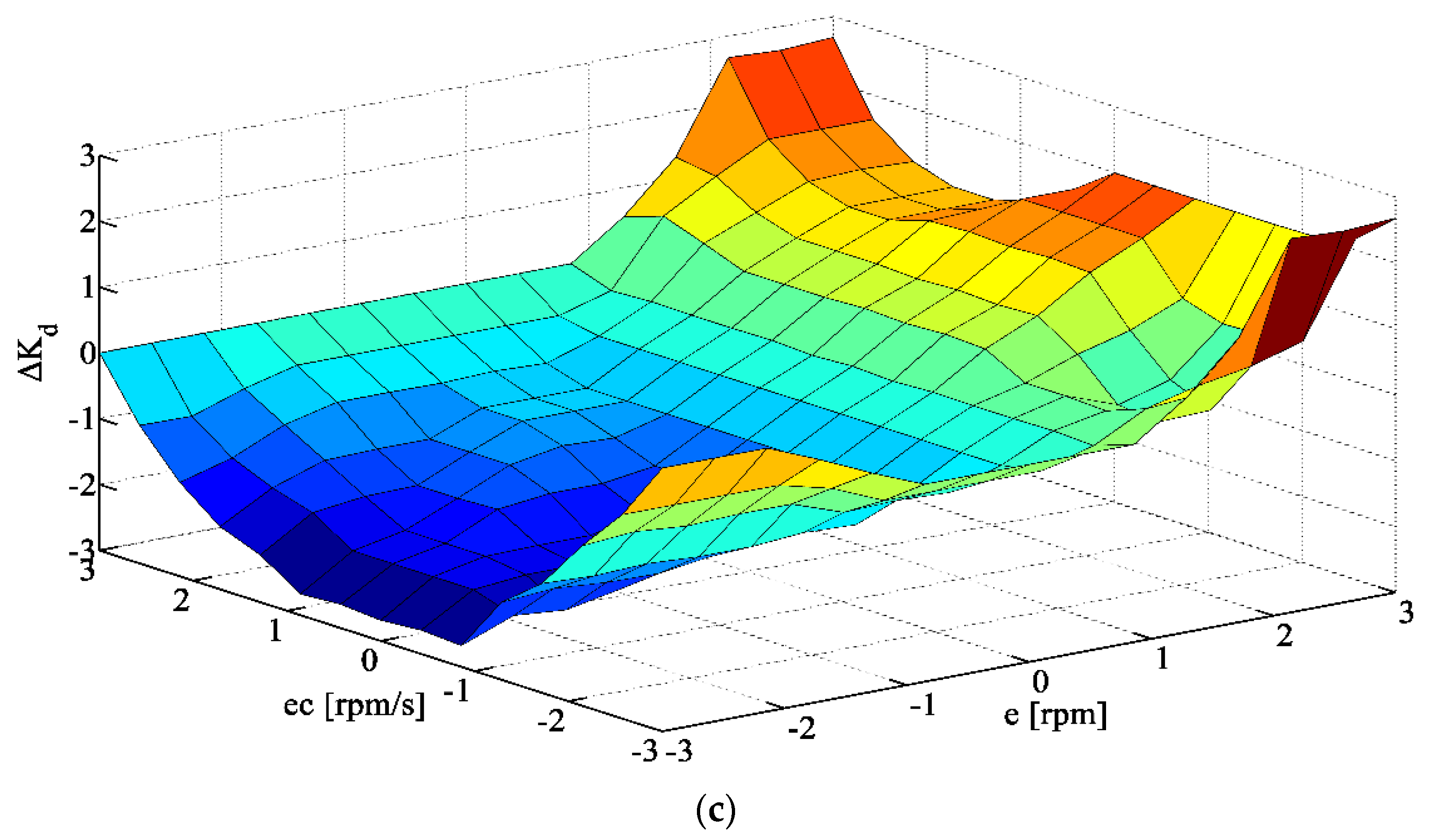
4.1.3. PID–Bang-Bang–Fuzzy Compound Intelligent Algorithm
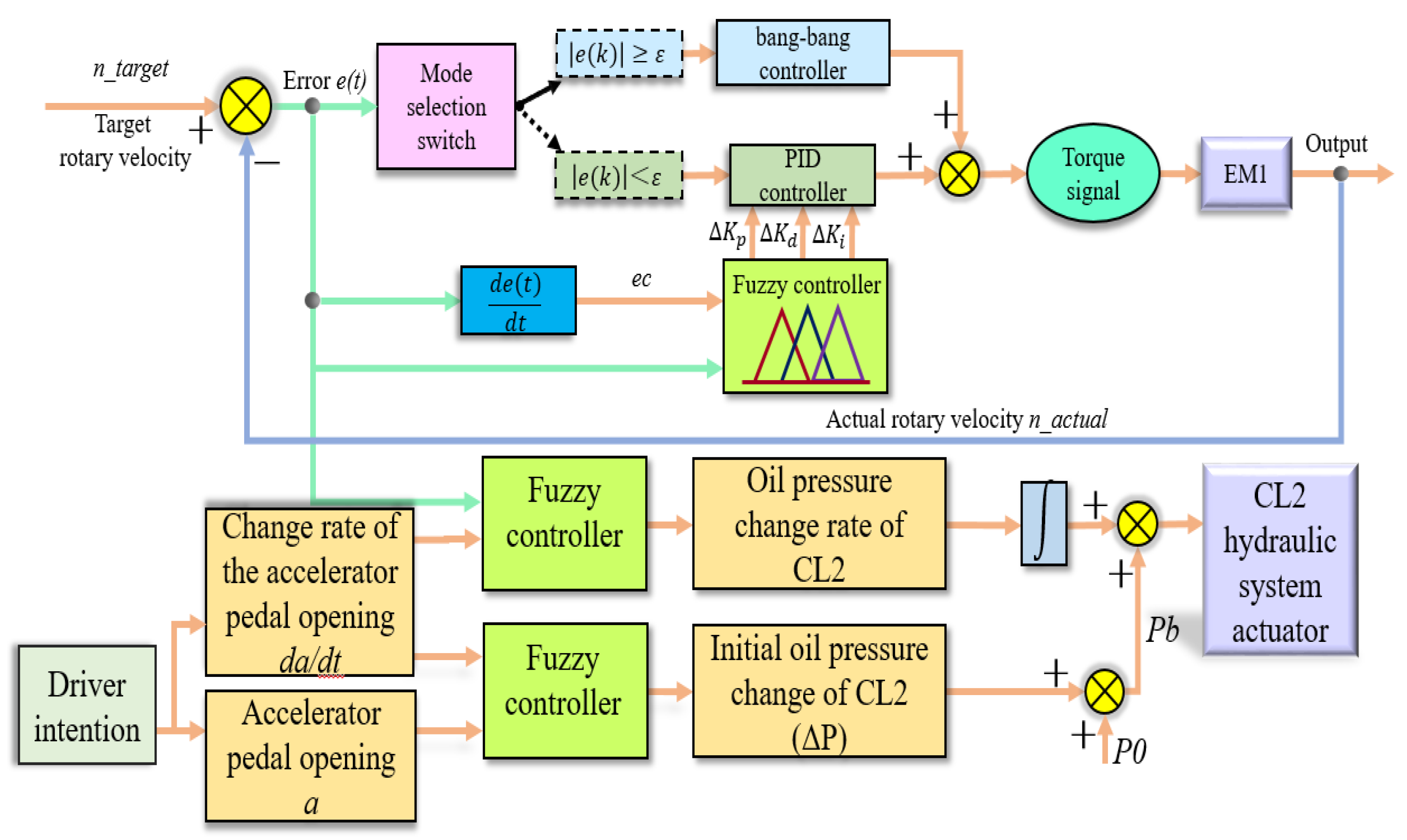
4.2. Coordinated Control Strategy for Motor and Clutch
5. Simulation Results and Analysis
5.1. Motor Rotary Velocity Regulation Performance Analysis
5.1.1. Based on PID Algorithm
5.1.2. Based on PID–Bang-Bang Compound Algorithm
5.1.3. Based on PID–Bang-Bang–Fuzzy Compound Intelligent Algorithm
5.1.4. Comparison of Different Control Algorithms
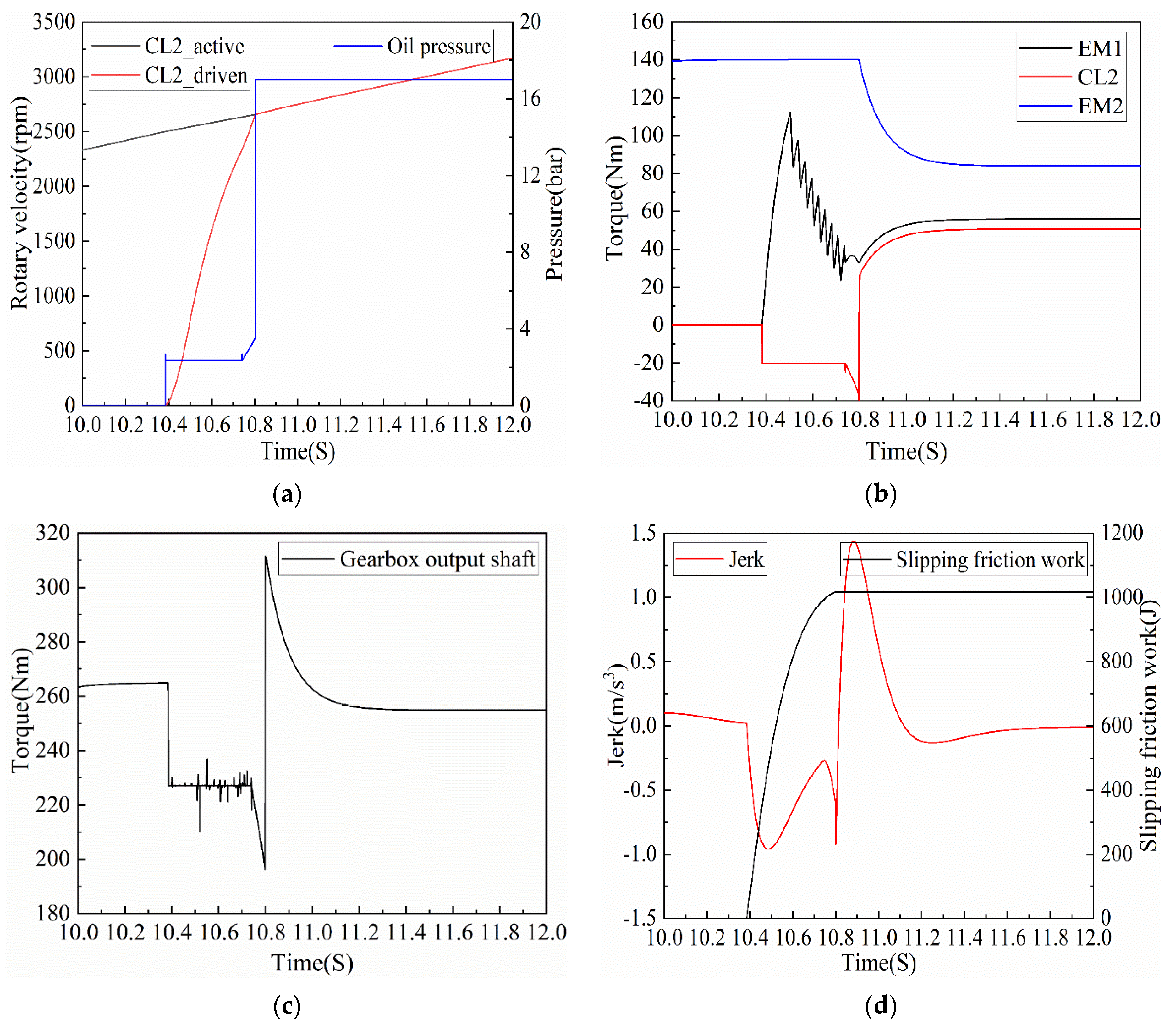
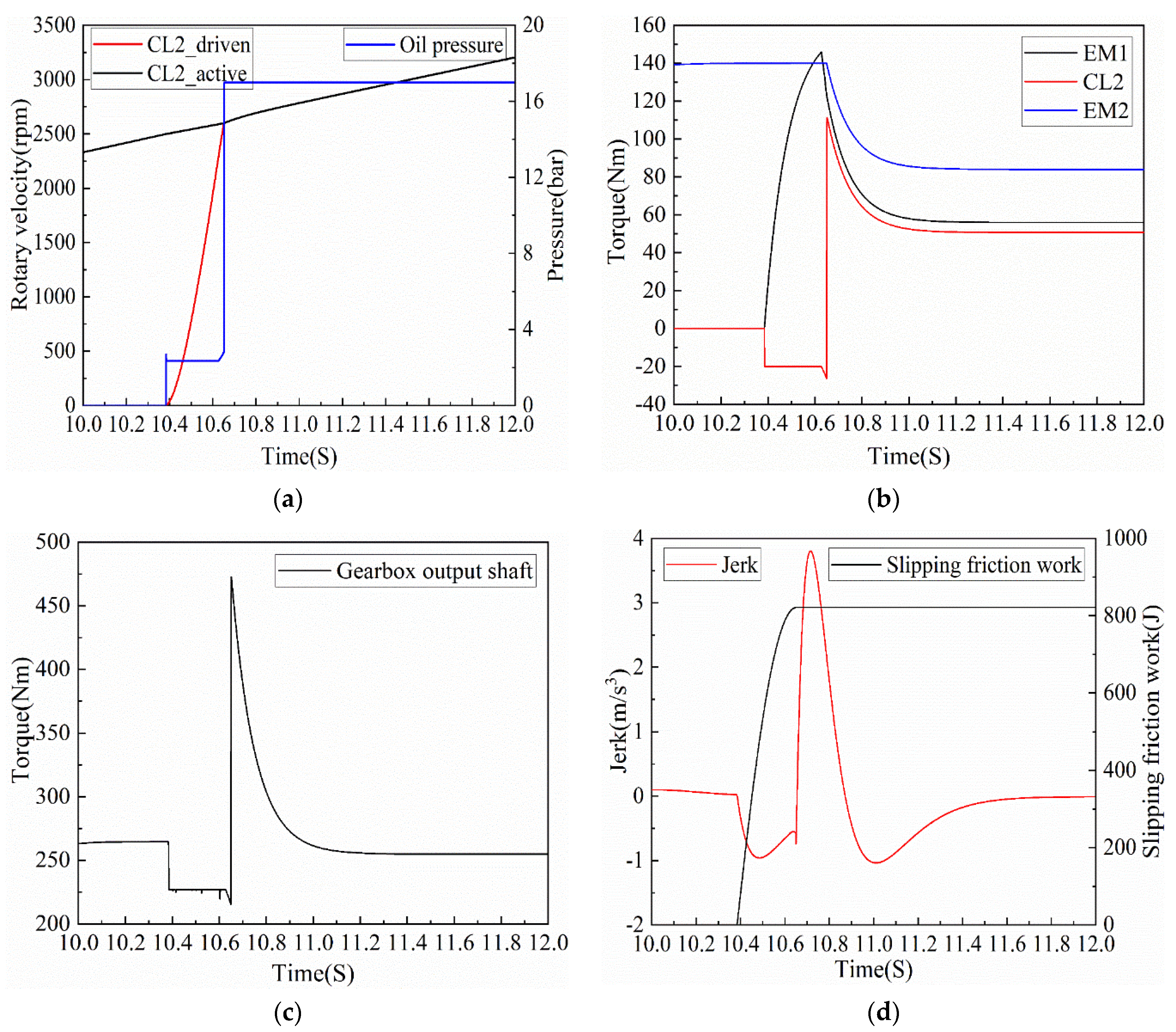
5.2. Gear Shift Performance Analysis
6. Conclusions
- (1)
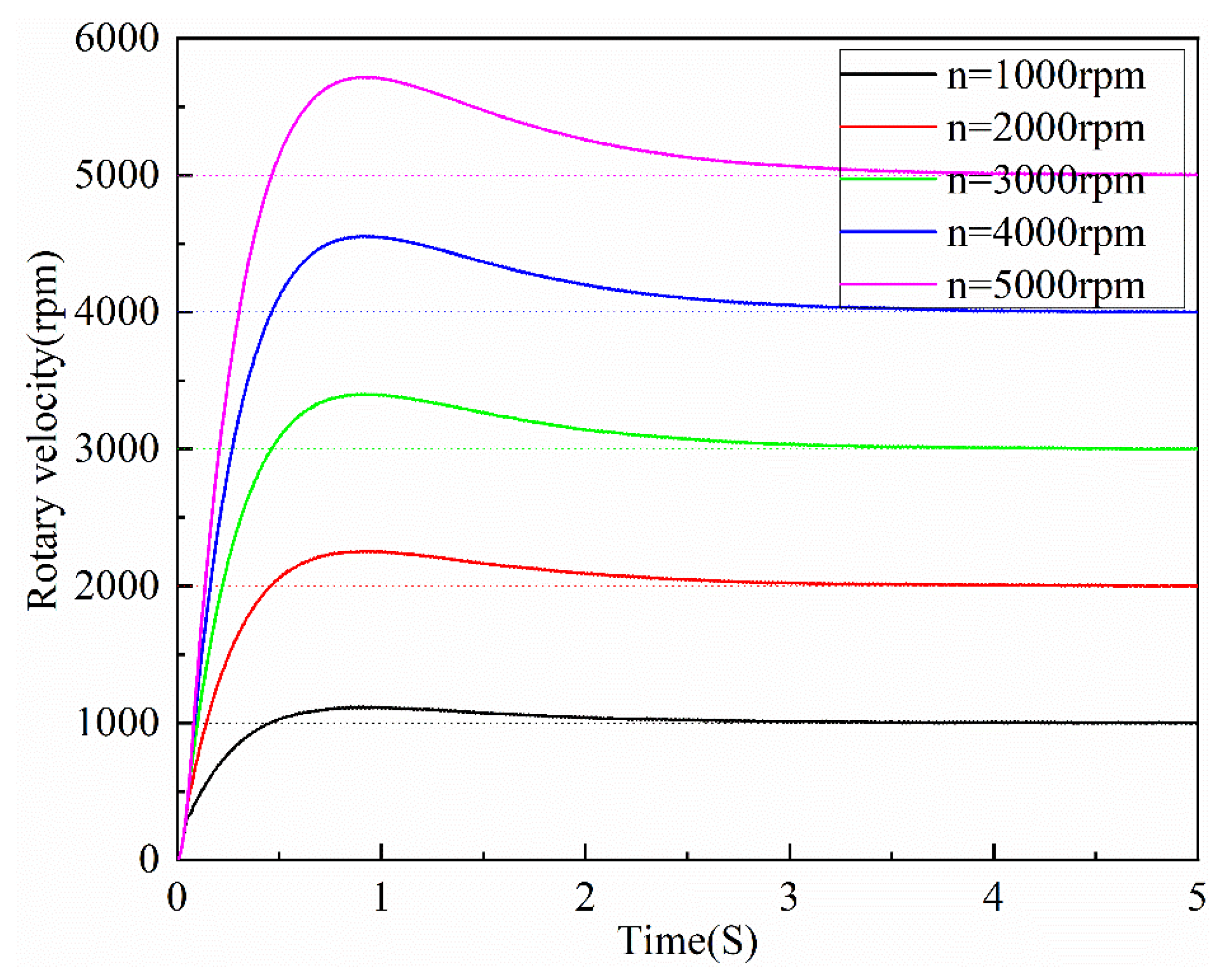
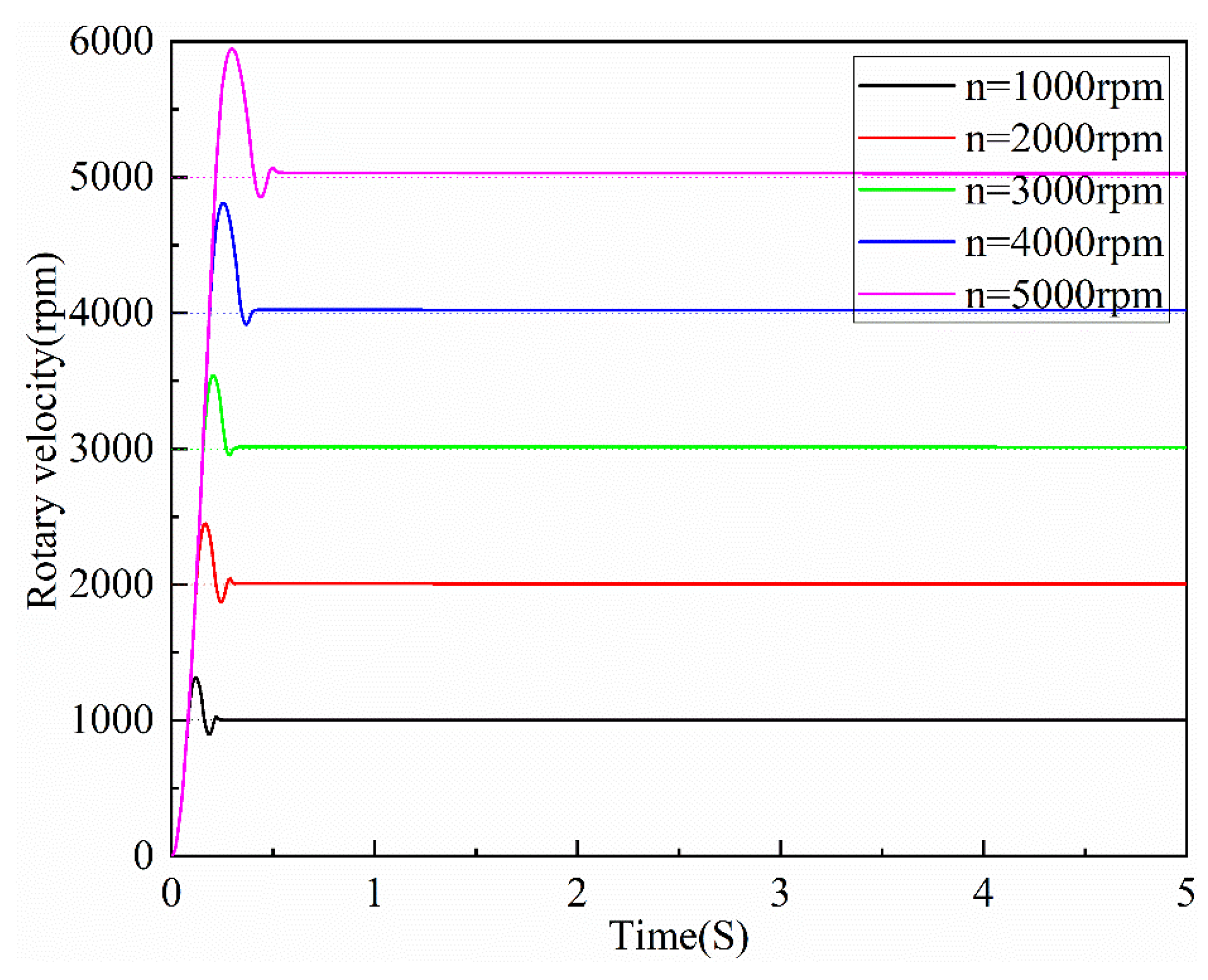
- When the PID algorithm was applied to the motor rotary velocity control system, with an increase in the target rotary velocity, the rise time and peak time of the motor rotary velocity regulation were basically unchanged, while the regulation time and maximum overshoot both gradually increased with an approximately linear growth trend.
- (2)
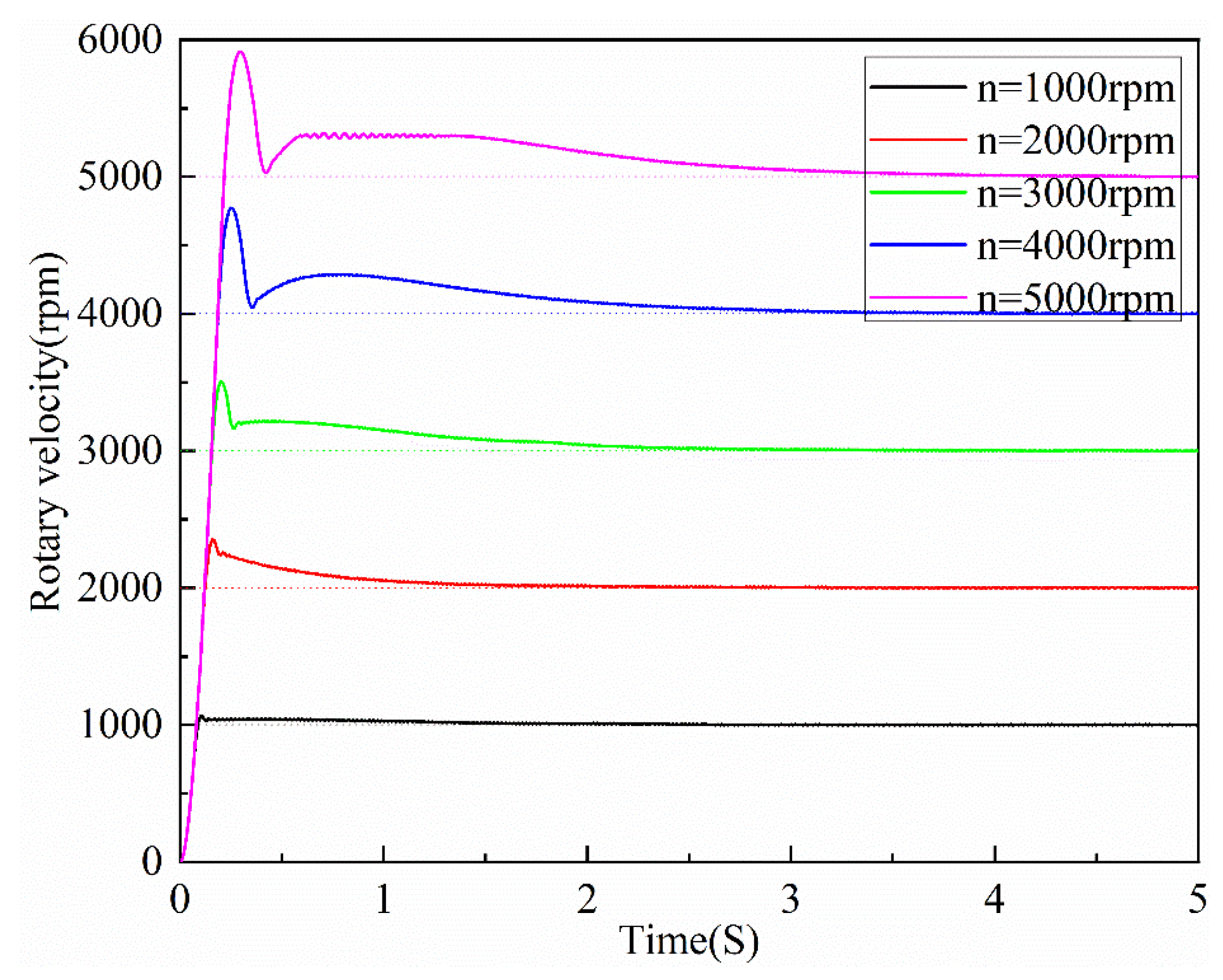
- When the PID–bang-bang compound algorithm was applied to the motor rotary velocity control system, as the target rotary velocity was increased, the rise time, peak time, and regulation time of the motor rotary velocity regulation gradually increased with an approximately linear growth trend. Meanwhile, the maximum overshoot also gradually increased with a nonlinear increasing trend.
- (3)
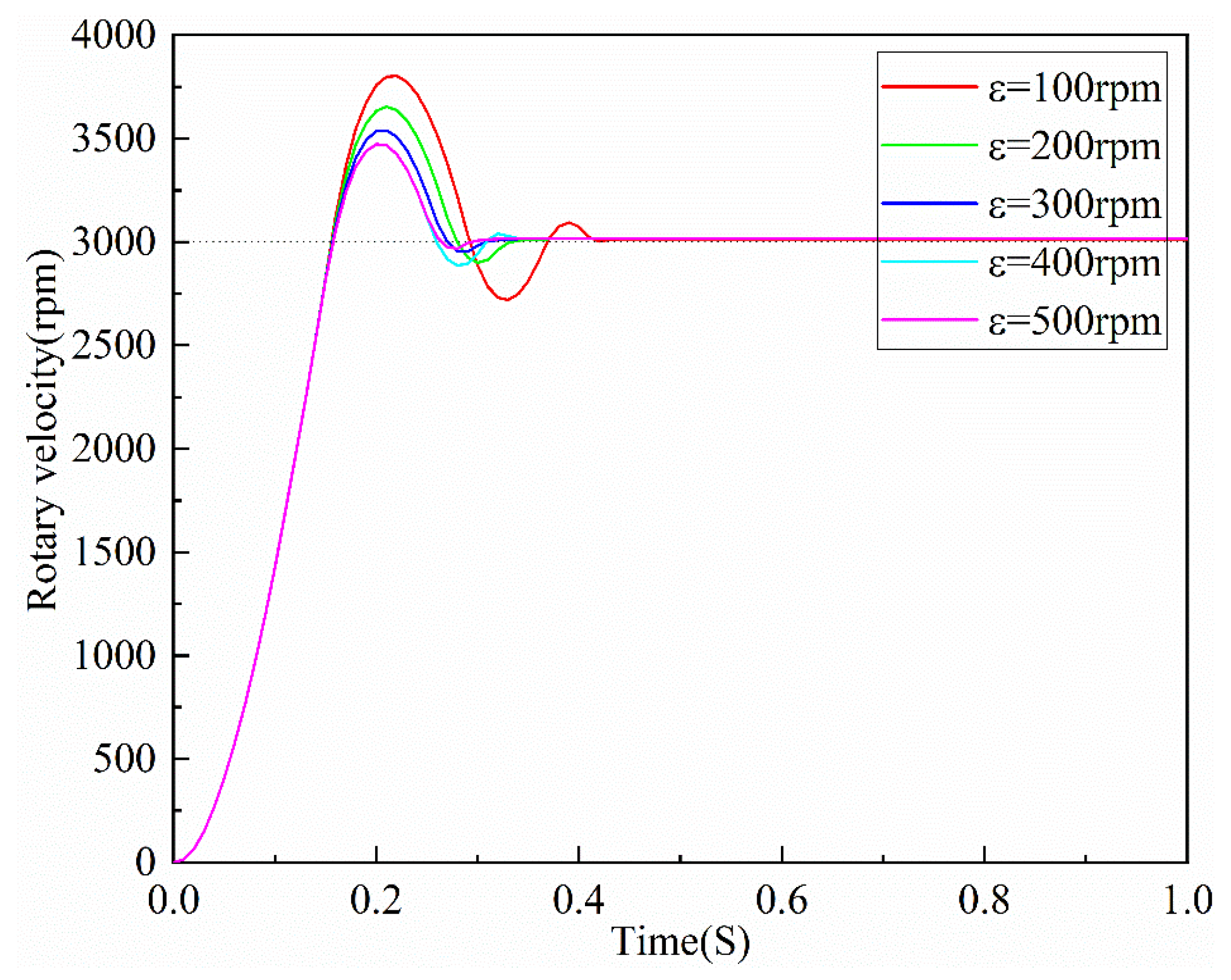
- When the PID–bang-bang–fuzzy compound intelligent algorithm was applied to a motor rotary velocity control system, with an increase in the target rotary velocity, the rise time, peak time, and regulation time of the motor rotary velocity regulation gradually increased, and it showed an approximately linear growth trend. However, the maximum overshoot gradually decreased, and its decreasing trend presented a nonlinear law. Furthermore, when the target rotary velocity was a constant value (3000 rpm), with an increase in the algorithm threshold, the rise time of the motor rotary velocity regulation remained unchanged. The peak time, regulation time, and maximum overshoot gradually decreased, and the decreasing trend was nonlinear.
- (4)
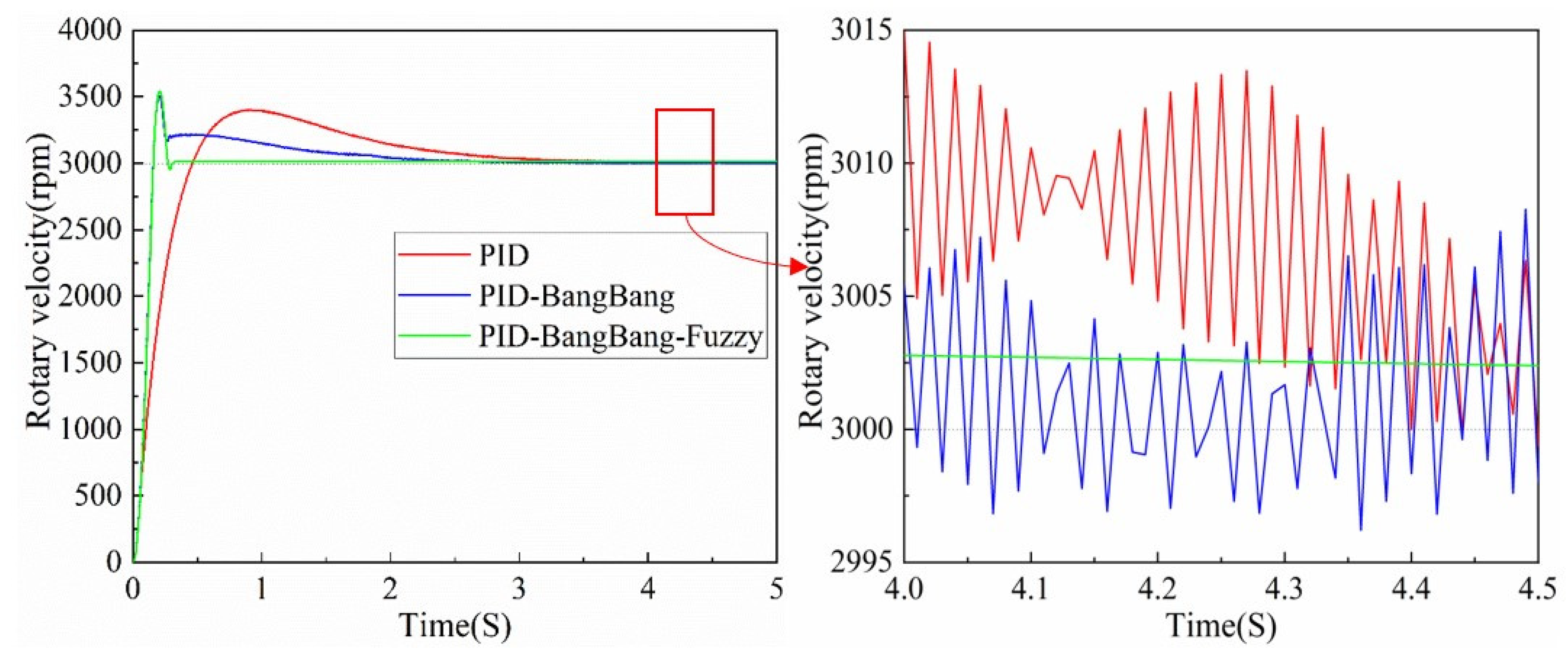
- For the motor rotary velocity regulation control algorithm, different control algorithms have different effects on the rotary velocity regulation effect. Compared with PID and PID–bang-bang, the steady-state response and dynamic response of the motor rotary velocity regulation process are significantly improved by using the PID–bang-bang–fuzzy compound intelligent control algorithm proposed in this paper.
- (5)
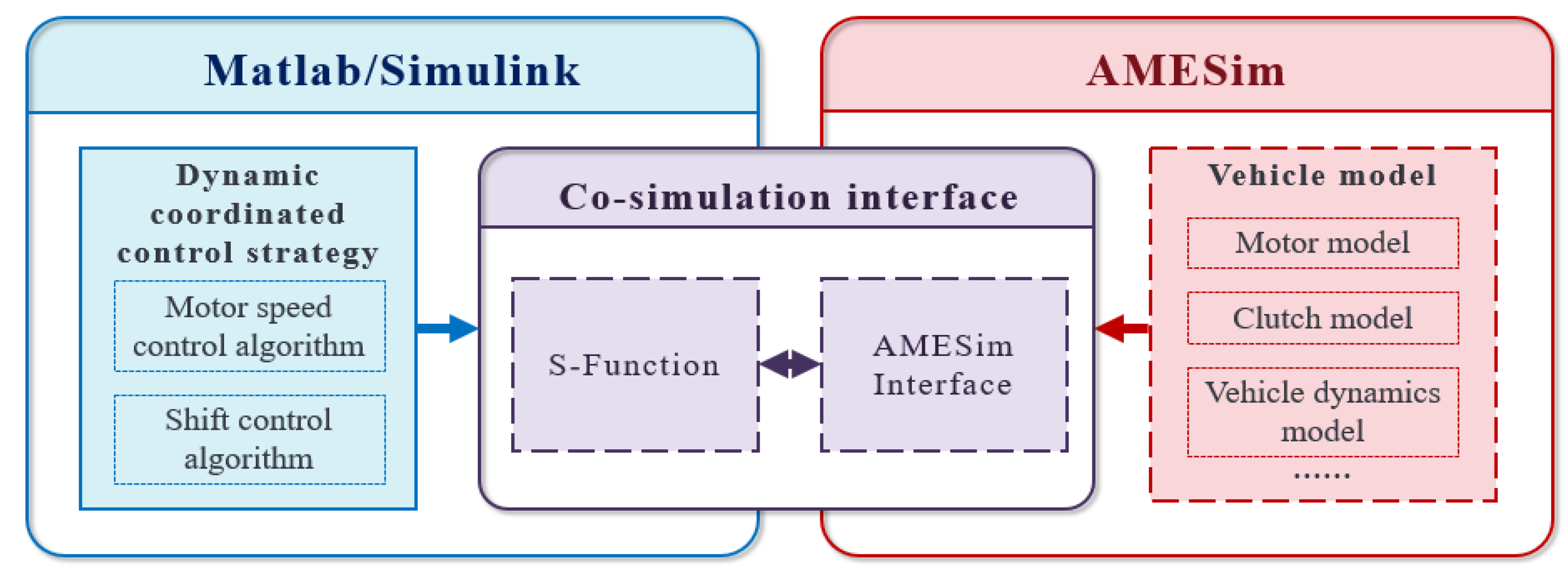
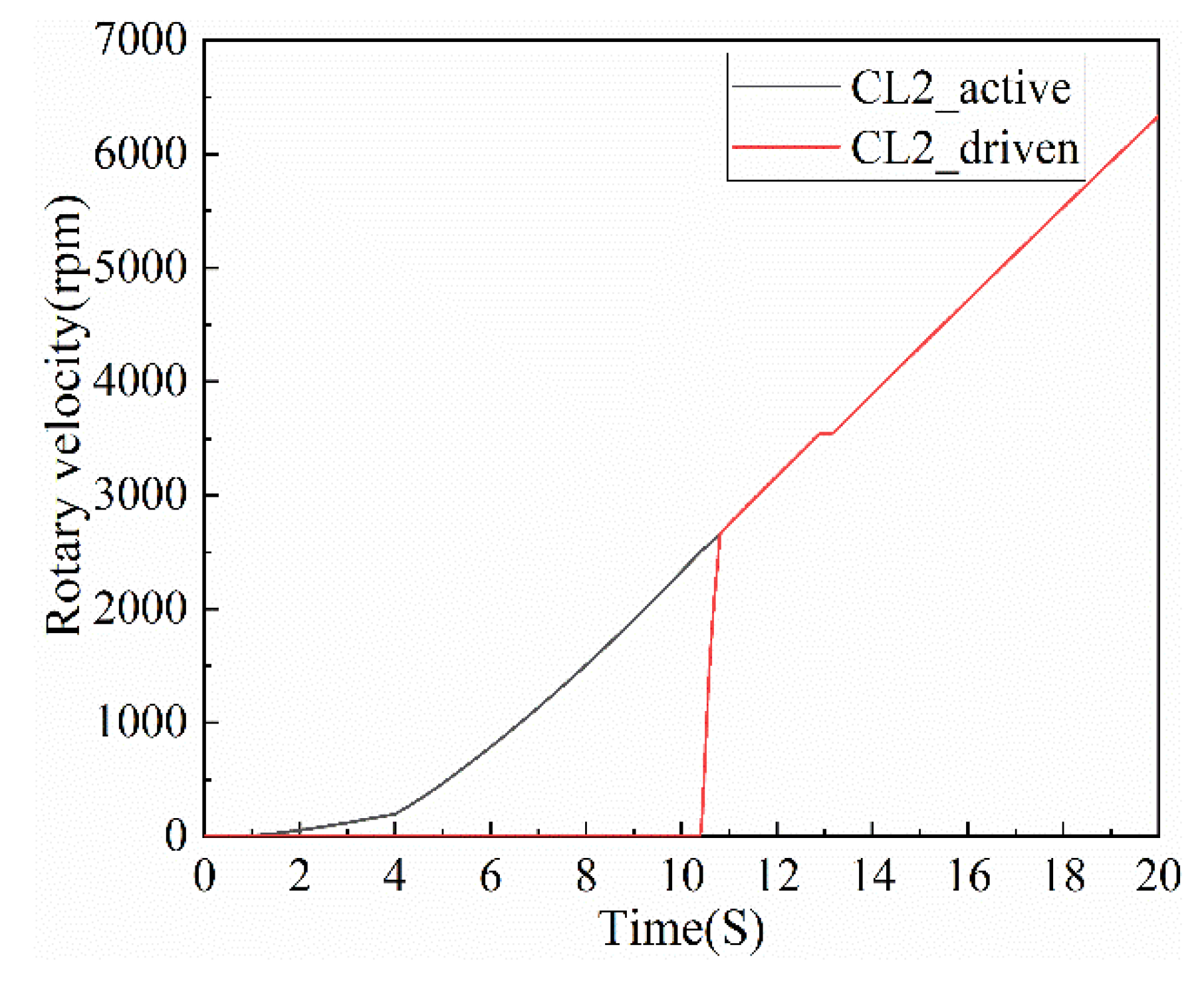
- In this paper, a coordinated control strategy for shifting gears, based on motor rotary velocity regulation, is designed for the novel hybrid electric vehicle. Compared with the gear shift coordinated control strategy based on the PID control algorithm, the control strategy, based on the PID–bang-bang–fuzzy compound intelligent control algorithm proposed in this paper, reduced the shift time and clutch slipping friction work by 35.7% and 19.2%, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
References
- Balali, Y.; Stegen, S. Review of energy storage systems for vehicles based on technology, environmental impacts, and costs. Renew. Sustain. Energy Rev. 2021, 135, 110185. [Google Scholar] [CrossRef]
- Laberteaux, K.P.; Hamza, K. A study on opportune reduction in greenhouse gas emissions via adoption of electric drive vehicles in light duty vehicle fleets. Transp. Res. Part D Transp. Environ. 2018, 63, 839–854. [Google Scholar] [CrossRef]
- Won, H.W. A Method and System for Combining the Advantages of Gasoline Compression Ignition (GCI) Engine Technologies into Hybrid Electric Vehicles (HEVs). Appl. Sci. 2021, 11, 9934. [Google Scholar] [CrossRef]
- Gu, J.; Zhao, Z.; Chen, Y.; He, L.; Zhan, X. Integrated optimal design of configuration and parameter of multimode hybrid powertrain system with two planetary gears. Mech. Mach. Theory 2020, 143, 103630. [Google Scholar] [CrossRef]
- Anselma, P.G.; Del Prete, M.; Belingardi, G. Battery High Temperature Sensitive Optimization-Based Calibration of Energy and Thermal Management for a Parallel-through-the-Road Plug-in Hybrid Electric Vehicle. Appl. Sci. 2021, 11, 8593. [Google Scholar] [CrossRef]
- Spano, M.; Anselma, P.G.; Misul, D.A.; Belingardi, G. Exploitation of a Particle Swarm Optimization Algorithm for Designing a Lightweight Parallel Hybrid Electric Vehicle. Appl. Sci. 2021, 11, 6833. [Google Scholar] [CrossRef]
- Cong, T.N.; Walker, P.D.; Nong, Z. Shifting strategy and energy management of a two-motor drive powertrain for extended-range electric buses. Mech. Mach. Theory 2020, 153, 103966. [Google Scholar]
- Dong, P.; Wu, S.; Guo, W.; Xu, X.; Wang, S.; Liu, Y. Coordinated clutch slip control for the engine start of vehicles with P2-hybrid automatic transmissions. Mech. Mach. Theory 2020, 153, 103899. [Google Scholar] [CrossRef]
- Zhou, J.; Xue, S.; Xue, Y.; Liao, Y.; Liu, J.; Zhao, W. A novel energy management strategy of hybrid electric vehicle via an improved TD3 deep reinforcement learning. Energy 2021, 224, 120118. [Google Scholar] [CrossRef]
- Singh, K.V.; Bansal, H.O.; Singh, D. Fuzzy logic and Elman neural network tuned energy management strategies for a power-split HEVs. Energy 2021, 225, 120152. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, L.; Guo, X.; Yuan, X. Stage-by-phase multivariable combination control for centralized and distributed drive modes switching of electric vehicles. Mech. Mach. Theory 2020, 147, 103752. [Google Scholar] [CrossRef]
- Biswas, A.; Anselma, P.G.; Rathore, A.; Emadi, A. Effect of coordinated control on real-time optimal mode selection for multi-mode hybrid electric powertrain. Appl. Energy 2021, 289, 116695. [Google Scholar] [CrossRef]
- Fu, J.; Song, S.; Fu, Z.; Ma, J. Coordinated control strategy to reduce torque fluctuation for parallel hybrid electric vehicles. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 4181–4186. [Google Scholar] [CrossRef]
- Sim, K.; Oh, S.-M.; Namkoong, C.; Lee, J.-S.; Han, K.-S.; Hwang, S.-H. Control strategy for clutch engagement during mode change of plug-in hybrid electric vehicle. Int. J. Automot. Technol. 2017, 18, 901–909. [Google Scholar] [CrossRef]
- Zeng, X.; Yang, N.; Wang, J.; Song, D.; Zhang, N.; Shang, M.; Liu, J. Predictive-model-based dynamic coordination control strategy for power-split hybrid electric bus. Mech. Syst. Signal Process. 2015, 60–61, 785–798. [Google Scholar] [CrossRef]
- Liu, L.; Liang, X.; Zuo, M.J. Vibration signal modeling of a planetary gear set with transmission path effect analysis. Measurement 2016, 85, 20–31. [Google Scholar] [CrossRef]
- Yu, Z.; Hou, Y.; Leng, B.; Xiong, L.; Li, Y. Disturbance Compensation and Torque Coordinated Control of Four In-Wheel Motor Independent-Drive Electric Vehicles. IEEE Access 2020, 8, 119758–119767. [Google Scholar] [CrossRef]
- Zhang, F.-Q.; Hu, Y.-H.; Xi, J.-Q.; Li, Y. The Coordinate Control Strategy of Torque Recovery for the Parallel Hybrid Electric Vehicle. Asian J. Control 2016, 18, 40–54. [Google Scholar] [CrossRef]
- López, I.; Ibarra, E.; Matallana, A.; Andreu, J.; Kortabarria, I. Next generation electric drives for HEV/EV propulsion systems: Technology, trends and challenges. Renew. Sustain. Energy Rev. 2019, 114, 109336. [Google Scholar] [CrossRef]
- Wu, G.; Dong, Z. Design, analysis and modeling of a novel hybrid powertrain system based on hybridized automated manual transmission. Mech. Syst. Signal Process. 2017, 93, 688–705. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, X.; Dong, Z. Powertrain architectures of electrified vehicles: Review, classification and comparison. J. Frankl. Inst. 2015, 352, 425–448. [Google Scholar] [CrossRef]
- Huang, W.; Huang, J.; Yin, C. Optimal Design and Control of a Two-Speed Planetary Gear Automatic Transmission for Electric Vehicle. Appl. Sci. 2020, 10, 6612. [Google Scholar] [CrossRef]
- Zhao, K.; Liu, Y.; Huang, X.; Yang, R.; Wei, J. Uninterrupted Shift Transmission and Its Shift Characteristics. IEEE/ASME Trans. Mechatron. 2013, 19, 374–383. [Google Scholar] [CrossRef]
- Walker, P.D.; Zhang, N. Active damping of transient vibration in dual clutch transmission equipped powertrains: A comparison of conventional and hybrid electric vehicles. Mech. Mach. Theory 2014, 77, 1–12. [Google Scholar] [CrossRef]
- Lei, Z.; Sun, D.; Liu, Y.; Qin, D.; Zhang, Y.; Yang, Y.; Chen, L. Analysis and coordinated control of mode transition and shifting for a full hybrid electric vehicle based on dual clutch transmissions. Mech. Mach. Theory 2017, 114, 125–140. [Google Scholar] [CrossRef]
- Gao, B.; Liang, Q.; Xiang, Y.; Guo, L.; Chen, H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mech. Syst. Signal Process. 2015, 50–51, 615–631. [Google Scholar] [CrossRef]
- Yu, C.-H.; Tseng, C.-Y. Research on gear-change control technology for the clutchless automatic–manual transmission of an electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1446–1458. [Google Scholar] [CrossRef]
- Tseng, C.-Y.; Yu, C.-H. Advanced shifting control of synchronizer mechanisms for clutchless automatic manual transmission in an electric vehicle. Mech. Mach. Theory 2015, 84, 37–56. [Google Scholar] [CrossRef]
- Mo, W.; Wu, J.; Walker, P.D.; Zhang, N. Shift characteristics of a bilateral Harpoon-shift synchronizer for electric vehicles equipped with clutchless AMTs. Mech. Syst. Signal Process. 2021, 148, 107166. [Google Scholar] [CrossRef]
- Walker, P.; Zhu, B.; Zhang, N. Powertrain dynamics and control of a two speed dual clutch transmission for electric vehicles. Mech. Syst. Signal Process. 2017, 85, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Wang, X.; Xiong, R.; He, K.; Li, X. AMT downshifting strategy design of HEV during regenerative braking process for energy conservation. Appl. Energy 2016, 183, 914–925. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Item | Value/Unit |
|---|---|---|
| Vehicle | Vehicle mass | 1545 kg |
| Wheel radius | 0.347 m | |
| Drag coefficient | 0.36 | |
| Rolling resistance coefficient | 0.008 | |
| Windward area | 2.638 m2 | |
| ICE | Maximum power | 110 kW |
| Maximum torque | 210 Nm | |
| Operating speed range | 700–5500 rpm | |
| EM1 | Peak torque | 160 Nm |
| Peak power | 55 kW | |
| Peak speed | 6200 rpm | |
| EM2 | Peak torque | 155 Nm |
| peak power | 70 kW | |
| Peak speed | 12,000 rpm | |
| Gearbox | First gear ratio | 2.03 |
| Second gear ratio | 1.1 | |
| Three gear ratio | 0.63 | |
| Main reducer | Gear ratio | 3.9 |
| SY | CL2 | CL3 | Gear Path | ID | |
|---|---|---|---|---|---|
| EM1 | EM2 | ||||
| 1 | 0 | 0 | 0 | 1 | 01 |
| 1 | 0 | 1 | 2 | 1 | 21 |
| 1 | 1 | 0 | 1 | 1 | 11 |
| 1 | 1 | 1 | X | X | X |
| N | 0 | 0 | 0 | 0 | 00 |
| N | 0 | 1 | 2 | 0 | 20 |
| N | 1 | 0 | 0 | 0 | 00 |
| N | 1 | 1 | 2 | 2 | 22 |
| 3 | 0 | 0 | 0 | 3 | 03 |
| 3 | 0 | 1 | 2 | 3 | 23 |
| 3 | 1 | 0 | 3 | 3 | 33 |
| 3 | 1 | 1 | X | X | X |
| Clutch | Coefficient of Friction | Number of Friction Surfaces | Outer Diameter of Friction Surface/mm | Inner Diameter of Friction Surface/mm |
|---|---|---|---|---|
| CL1 | 0.12 | 8 | 129 | 108.1 |
| CL2 | 0.12 | 10 | 120.1 | 107 |
| CL3 | 0.12 | 12 | 126.7 | 110.8 |
| Clutch Hydraulic Cylinder | Piston Diameter/mm | Piston Rod Diameter/mm | Piston Stroke/mm | Maximum Force on Piston/N |
|---|---|---|---|---|
| CL1 | 60 | 30 | 2 | 8984 |
| CL2 | 45 | 25 | 1.3 | 5779.94 |
| CL3 | 45 | 25 | 1.5 | 6027.34 |
| Control Algorithm | Advantages | Disadvantages |
|---|---|---|
| PID | The principle of the algorithm is simple; Effective control can be achieved even when the model of the controlled object is not known. | Conventional PID algorithm is prone to problems such as excessive adjustment time and excessive overshoot; The ability to adapt to model parameter changes and interference is poor. |
| Bang-bang | Response time is fast. | It is easy to cause overshoot and fluctuation and reduce the system accuracy. The steady-state error is large. |
| Fuzzy logic | Fuzzy controller has good robustness and does not depend on accurate mathematical model. It is suitable for nonlinear and large time-delay control systems. | There is static error; Poor tracking quality. |
| PID–bang-bang–fuzzy | PID–bang-bang–fuzzy composite controller has good quality in robustness, steady-state error and dynamic tracking performance. | The structure of the control algorithm is complex. |
| Gear Shift Control Strategy | Shift Time | Maximum Jerk | CL2 Slipping Friction Work |
|---|---|---|---|
| Based on PID | 0.42 s | 1.46 m/s3 | 1017 J |
| Based on PID–bang-bang–fuzzy | 0.27 s | 3.77 m/s3 | 821.3 J |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, Q.; Zhang, X.; Geng, C.; Teng, T. Gear Shift Coordinated Control Strategy Based on Motor Rotary Velocity Regulation for a Novel Hybrid Electric Vehicle. Appl. Sci. 2021, 11, 12118. https://doi.org/10.3390/app112412118
Xue Q, Zhang X, Geng C, Teng T. Gear Shift Coordinated Control Strategy Based on Motor Rotary Velocity Regulation for a Novel Hybrid Electric Vehicle. Applied Sciences. 2021; 11(24):12118. https://doi.org/10.3390/app112412118
Chicago/Turabian StyleXue, Qicheng, Xin Zhang, Cong Geng, and Teng Teng. 2021. "Gear Shift Coordinated Control Strategy Based on Motor Rotary Velocity Regulation for a Novel Hybrid Electric Vehicle" Applied Sciences 11, no. 24: 12118. https://doi.org/10.3390/app112412118
APA StyleXue, Q., Zhang, X., Geng, C., & Teng, T. (2021). Gear Shift Coordinated Control Strategy Based on Motor Rotary Velocity Regulation for a Novel Hybrid Electric Vehicle. Applied Sciences, 11(24), 12118. https://doi.org/10.3390/app112412118