
Evaluation of Autonomous Mowers Weed Control Effect in Globe Artichoke Field


 ,
,  ,
, 



Abstract
:1. Introduction
2. Materials and Methods
2.1. The Globe Artichoke Field
2.2. Experimental Set up and Design of the Two Trials
2.2.1. Trial 1: Performance Evaluation of Three different Autonomous Mowers
2.2.2. Trial 2: Comparison between the Weed Control Effect of Autonomous Mower and Conventional Weed Management
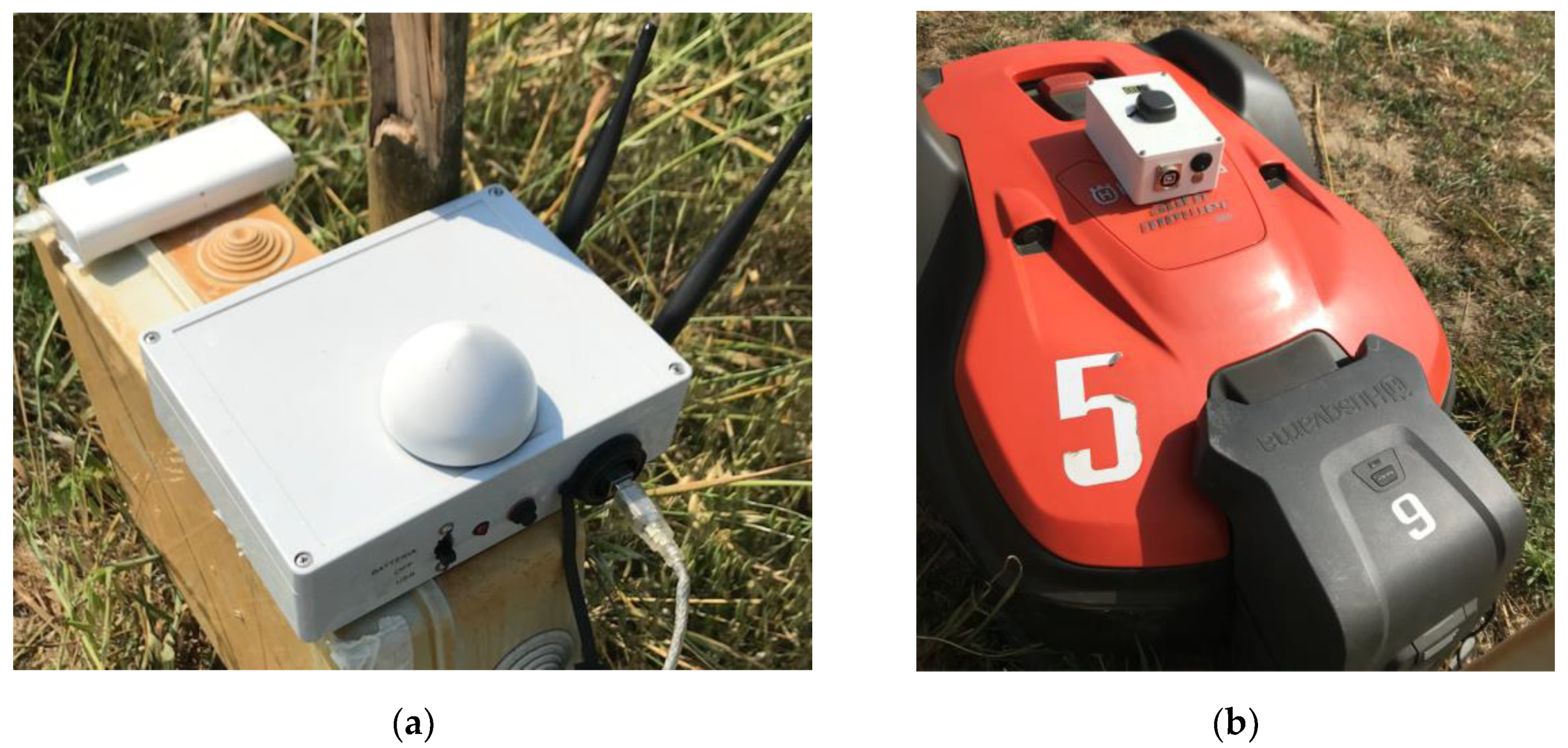
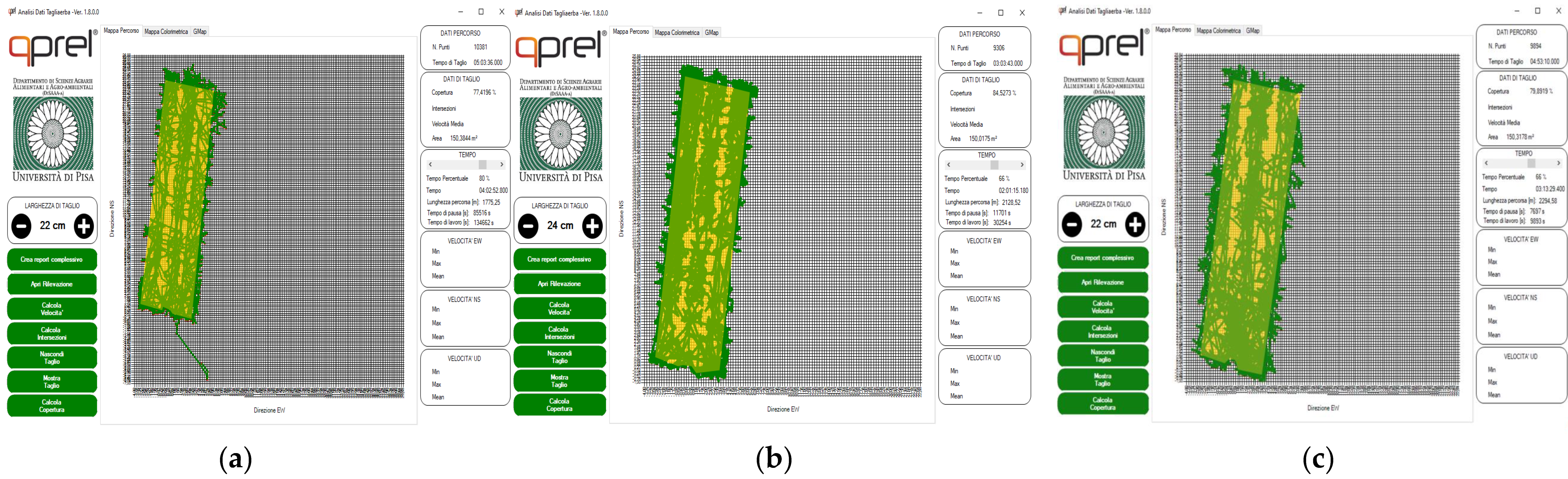
2.3. Data Collection
2.4. Statistical Analysis
3. Results
3.1. Performances of the Three Autonomous Mowers
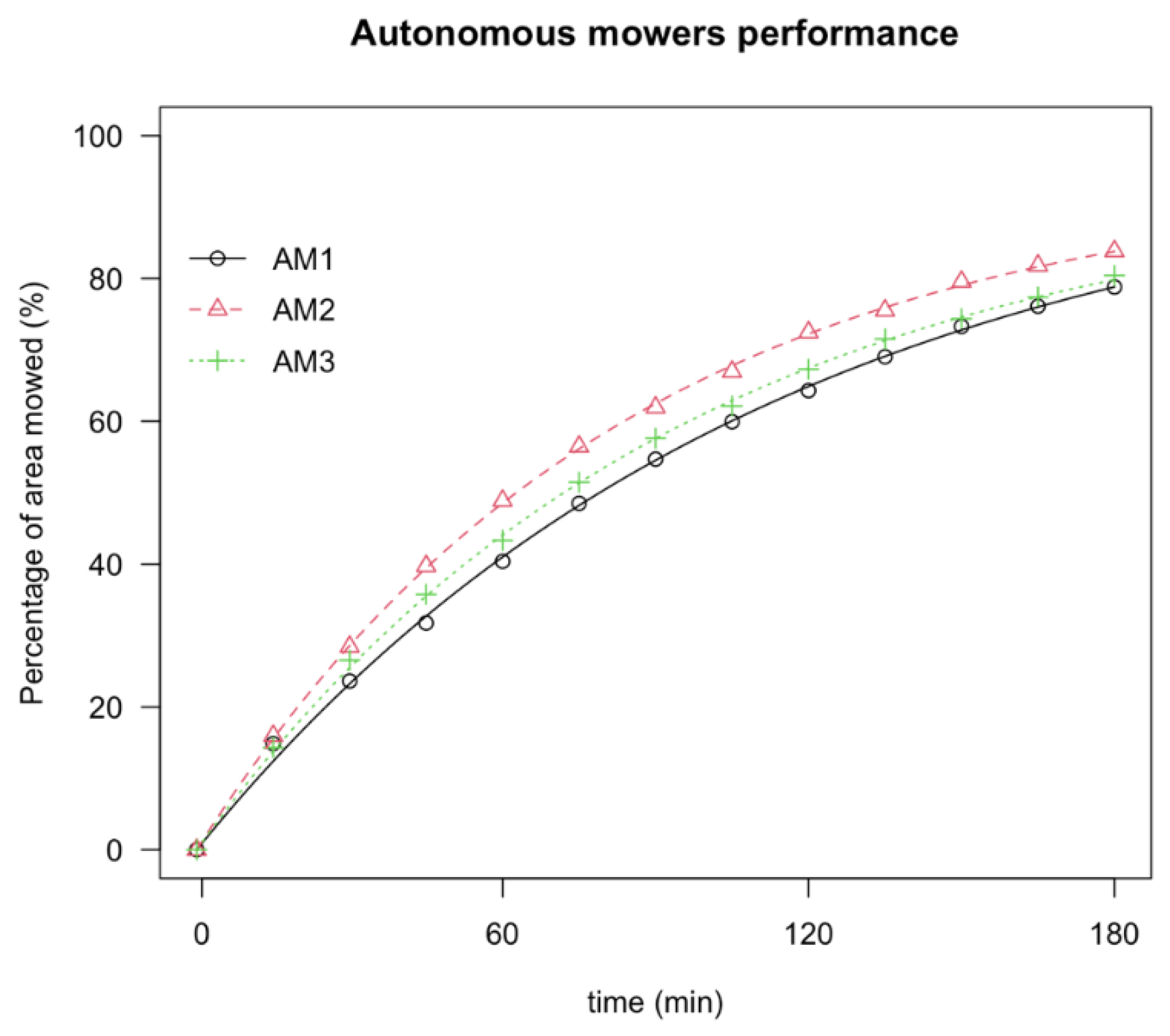
3.1.1. The Percentage of Area Mowed
3.1.2. Energy Consumption of the Three Autonomous Mowers
3.2. Comparison of the Two Weed Management Systems
3.2.1. Energy Consumption of the Flail Mower
3.2.2. Average Weeds Height, Weed Cover Percentage, Above-Ground Weed Biomass and Globe Artichoke Yield
3.2.3. Estimated Cost of the Two Weed Management Systems
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Marinoudi, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Robotics and Labour in Agriculture. A Context Consideration. Biosyst. Eng. 2019, 184, 111–121. [Google Scholar] [CrossRef]
- Auat Cheein, F.A.; Carelli, R. Agricultural Robotics: Unmanned Robotic Service Units in Agricultural Tasks. IEEE Ind. Electron. Mag. 2013, 7, 48–58. [Google Scholar] [CrossRef]
- Eberhardt, M.; Vollrath, D. The Effect of Agricultural Technology on the Speed of Development. World Dev. 2018, 109, 483–496. [Google Scholar] [CrossRef]
- Vasconez, J.P.; Kantor, G.A.; Auat Cheein, F.A. Human–Robot Interaction in Agriculture: A Survey and Current Challenges. Biosyst. Eng. 2019, 179, 35–48. [Google Scholar] [CrossRef]
- Walker, D.; Kurth, T.; Wyck, J.V.; Tilney, M. Lessons from the Front Lines of the Agtech Revolution. Boston Consult. Group 2016, 4, 2020. [Google Scholar]
- Oberti, R.; Shapiro, A. Advances in Robotic Agriculture for Crops. Biosyst. Eng. 2016, 146, 1–2. [Google Scholar] [CrossRef]
- Spykman, O.; Gabriel, A.; Ptacek, M.; Gandorfer, M. Farmers’ Perspectives on Field Crop Robots—Evidence from Bavaria, Germany. Comput. Electron. Agric. 2021, 186, 106176. [Google Scholar] [CrossRef]
- Raja, R.; Nguyen, T.T.; Slaughter, D.C.; Fennimore, S.A. Real-Time Weed-Crop Classification and Localisation Technique for Robotic Weed Control in Lettuce. Biosyst. Eng. 2020, 192, 257–274. [Google Scholar] [CrossRef]
- Smith, R.; Klonsky, K.; De Moura, R. Sample Costs to Produce Iceberg Lettuce; University of California Cooperative Extension Publication: Davis, CA, USA, 2007. [Google Scholar]
- Dusky, J.A.; Stall, W.M. Weed Management Practices for Lettuce Production Using Imazethapyr. In Proceedings of the the 108th Florida State Horticultural Society, Lake Alfred, FL, USA, 22 October 1995; pp. 204–207. [Google Scholar]
- Bell, C.E. Broccoli (Brassica Oleracea Var. Botrytis) Yield Loss from Italian Ryegrass (Lolium Perenne) Interference. Weed Sci. 1995, 43, 117–120. [Google Scholar] [CrossRef]
- Mennan, H.; Jabran, K.; Zandstra, B.H.; Pala, F. Non-Chemical Weed Management in Vegetables by Using Cover Crops: A Review. Agronomy 2020, 10, 257. [Google Scholar] [CrossRef] [Green Version]
- Fennimore, S.A.; Cutulle, M. Robotic Weeders Can Improve Weed Control Options for Specialty Crops. Pest Manag. Sci. 2019, 75, 1767–1774. [Google Scholar] [CrossRef]
- Turini, T.; Stewart, D.; Murdock, J. Sample Costs to Produce Processing Tomatoes, Sub-Surface, Drip Irrigated (SDI), San Joaquin Valley South, Fresno County; UC Cooperative Extension-Agricultural Issues Center: Davis, CA, USA, 2018. [Google Scholar]
- Fennimore, S.A.; Slaughter, D.C.; Siemens, M.C.; Leon, R.G.; Saber, M.N. Technology for Automation of Weed Control in Specialty Crops. Weed Technol. 2016, 30, 823–837. [Google Scholar] [CrossRef]
- ROBOVATOR. Available online: Https://Www.Robovator.Com/ (accessed on 21 June 2021).
- Lati, R.N.; Siemens, M.C.; Rachuy, J.S.; Fennimore, S.A. Intrarow Weed Removal in Broccoli and Transplanted Lettuce with an Intelligent Cultivator. Weed Technol. 2016, 30, 655–663. [Google Scholar] [CrossRef]
- Su, W.-H.; Fennimore, S.A.; Slaughter, D.C. Development of a Systemic Crop Signalling System for Automated Real-Time Plant Care in Vegetable Crops. Biosyst. Eng. 2020, 193, 62–74. [Google Scholar] [CrossRef]
- Raja, R.; Slaughter, D.C.; Fennimore, S.A.; Nguyen, T.T.; Vuong, V.L.; Sinha, N.; Tourte, L.; Smith, R.F.; Siemens, M.C. Crop Signalling: A Novel Crop Recognition Technique for Robotic Weed Control. Biosyst. Eng. 2019, 187, 278–291. [Google Scholar] [CrossRef]
- Steward, B.L.; Gai, J.; Tang, L. The Use of Agricultural Robots in Weed Management and Control. In Robotics and Automation for Improving Agriculture; Billingsley, J., Ed.; Burleigh Dodds Science Publishing Limited: Cambridge, UK, 2019. [Google Scholar]
- Slaughter, D.C.; Chen, P.; Curley, R.G. Vision Guided Precision Cultivation. Precis. Agric. 1999, 1, 199–216. [Google Scholar] [CrossRef]
- Milioto, A.; Lottes, P.; Stachniss, C. Real-Time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots Leveraging Background Knowledge in CNNs. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21 May 2018; p. 7. [Google Scholar]
- Slaughter, D.C.; Giles, D.K.; Fennimore, S.A.; Nguyen, T.T.; Vuong, V.; Neilson, L.; Vannucci, B. Robotic Plant Care Systems and Methods: Google Patents. 2019. Available online: https://patents.google.com/patent/WO2017181127A1/en. (accessed on 22 June 2021).
- Magni, S.; Sportelli, M.; Grossi, N.; Volterrani, M.; Minelli, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Gaetani, M.; Martelloni, L.; et al. Autonomous Mowing and Turf-Type Bermudagrass as Innovations for An Environment-Friendly Floor Management of a Vineyard in Coastal Tuscany. Agriculture 2020, 10, 189. [Google Scholar] [CrossRef]
- Sportelli, M.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Raffaelli, M.; Magni, S.; Caturegli, L.; Volterrani, M.; Mainardi, M.; Peruzzi, A. Autonomous Mowing and Complete Floor Cover for Weed Control in Vineyards. Agronomy 2021, 11, 538. [Google Scholar] [CrossRef]
- Sportelli, M.; Pirchio, M.; Fontanelli, M.; Volterrani, M.; Frasconi, C.; Martelloni, L.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; et al. Autonomous Mowers Working in Narrow Spaces: A Possible Future Application in Agriculture? Agronomy 2020, 10, 553. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, J.; Gallandt, E.R. Functionality and Efficacy of Franklin Robotics’ TertillTM Robotic Weeder. Weed Technol. 2021, 35, 166–170. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural Robots for Field Operations. Part 2: Operations and Systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A Survey on Coverage Path Planning for Robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef] [Green Version]
- Pergher; Gubiani; Mainardis Field Testing of a Biomass-Fueled Flamer for In-Row Weed Control in the Vineyard. Agriculture 2019, 9, 210. [CrossRef] [Green Version]
- Raffaelli, M.; Filippi, F.; Peruzzi, A.; Graifenberg, A. Flaming for Intra-Row Weed Control in Globe Artichoke. In Proceedings of the 6th EWRS Workshop on Physical and Cultural Weed Control, Lillehammer, Norway, 8 March 2004; p. 1. [Google Scholar]
- Lenzi, A.; Baldi, A.; Tesi, R. Artichoke (Cynara Scolymus L.) as Cash-Cover Crop in an Organic Vegetable System. Acta Agric. Slov. 2015, 105, 53–60. [Google Scholar] [CrossRef]
- FAO FAOSTAT. Statistical Database. Available online: https://www.fao.org/faostat/en/#home (accessed on 15 September 2021).
- Calabrese, N. Impianto. In Il Carciofo e il Cardo; Bayer Crop Science Inc., Script: Bologna, Italy, 2009; pp. 168–171. [Google Scholar]
- Husqvarna. Husqvarna Automower 310/315 Operator’s Manual; Husqvarna AB: Stockholm, Sweden, 2016. [Google Scholar]
- Husqvarna. Husqvarna Automower 520/550 Operator’s Manual; Husqvarna AB: Stockholm, Sweden, 2018. [Google Scholar]
- Husqvarna. Husqvarna Automower 535 AWD Operator’s Manual; Husqvarna AB: Stockholm, Sweden, 2019. [Google Scholar]
- Orec. Orec HR531 Operator’s Manual; Orec CO., LTD: Fukuoka, Japan, 2008. [Google Scholar]
- Martelloni, L.; Fontanelli, M.; Pieri, S.; Frasconi, C.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; Pirchio, M.; Raffaelli, M.; et al. Assessment of the Cutting Performance of a Robot Mower Using Custom Built Software. Agronomy 2019, 9, 230. [Google Scholar] [CrossRef] [Green Version]
- Emlid. A Reach RTK Docs. Specification. Available online: https://docs.emlid.com/reach/specs/ (accessed on 31 August 2021).
- Takasu, T. RTKLIB Ver. 2.4.2 Manual. Available online: http://www.rtklib.com/prog/manual_2.4.2.pdf (accessed on 31 August 2021).
- Honda GX200, Horizontal Shaft Gasoline (Petrol) Engine Manual. Available online: https://www.honda-engines-eu.com›TS_GX200 (accessed on 1 September 2021).
- Hoepli, Manuali Hoepli.It. 2019. Available online: https://www.manualihoepli.it/media/doc/pr243.pdf (accessed on 1 September 2021).
- Pirchio, M.; Fontanelli, M.; Labanca, F.; Sportelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; et al. Energetic Aspects of Turfgrass Mowing: Comparison of Different Rotary Mowing Systems. Agriculture 2019, 9, 178. [Google Scholar] [CrossRef] [Green Version]
- ISPRA—Istituto Superiore per La Protezione e La Ricerca Ambientale. Rapporti 343/2021. Available online: https://www.isprambiente.gov.it/files2021/pubblicazioni/rapporti/r343-2021.pdf (accessed on 1 September 2021).
- Valøen, L.O.; Shoesmith, M.I. The Effect of PHEV and HEV Duty Cycles on Battery and Battery Pack Performance. In Proceedings of the The PHEV 2007 Conference: Where the Grid Meets the Road, Winnipeg, MB, Canada, 1–2 November 2007; p. 9. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021. [Google Scholar]
- Ritz, C.; Baty, F.; Streibig, J.C.; Gerhard, D. Dose-Response Analysis Using R. PLoS ONE 2015, 10, e0146021. [Google Scholar] [CrossRef] [Green Version]
- Ritz, C. Asymptotic Regression Model. In Analysis of Dose-Response Curves; Ritz, C., Strebig, J.C., The Comprehensive R Archive Network, Eds.; 2016; pp. 7–8. [Google Scholar]
- Sheley, R. Mowing to Manage Noxious Weeds. Ext. Serv. MontGuide 2017, MT200104AG. [Google Scholar]
- Adeux, G.; Vieren, E.; Carlesi, S.; Bàrberi, P.; Munier-Jolain, N.; Cordeau, S. Mitigating Crop Yield Losses through Weed Diversity. Nat. Sustain. 2019, 2, 1018–1026. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; Caturegli, L.; Volterrani, M.; et al. Autonomous Mower vs. Rotary Mower: Effects on Turf Quality and Weed Control in Tall Fescue Lawn. Agronomy 2018, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Grossi, N.; Fontanelli, M.; Garramone, E.; Peruzzi, A.; Raffaelli, M.; Pirchio, M.; Martelloni, L.; Frasconi, C.; Caturegli, L.; Gaetani, M.; et al. Autonomous Mower Saves Energy and Improves Quality of Tall Fescue Lawn. HortTechnology 2016, 26, 825–830. [Google Scholar] [CrossRef] [Green Version]
- Antichi, D.; Sbrana, M.; Martelloni, L.; Abou Chehade, L.; Fontanelli, M.; Raffaelli, M.; Mazzoncini, M.; Peruzzi, A.; Frasconi, C. Agronomic Performances of Organic Field Vegetables Managed with Conservation Agriculture Techniques: A Study from Central Italy. Agronomy 2019, 9, 810. [Google Scholar] [CrossRef] [Green Version]
- Campiglia, E.; Mancinelli, R.; Radicetti, E.; Caporali, F. Effect of Cover Crops and Mulches on Weed Control and Nitrogen Fertilization in Tomato (Lycopersicon Esculentum Mill.). Crop Prot. 2010, 29, 354–363. [Google Scholar] [CrossRef]
- Chand, A.A.; Prasad, K.A.; Mar, E.; Dakai, S.; Mamun, K.A.; Islam, F.R.; Mehta, U.; Kumar, N.M. Design and Analysis of Photovoltaic Powered Battery-Operated Computer Vision-Based Multi-Purpose Smart Farming Robot. Agronomy 2021, 11, 530. [Google Scholar] [CrossRef]
- Charania, I.; Li, X. Smart Farming: Agriculture’s Shift from a Labor Intensive to Technology Native Industry. Internet Things 2020, 9, 100142. [Google Scholar] [CrossRef]
- Saiz-Rubio, V.; Rovira-Más, F. From Smart Farming towards Agriculture 5.0: A Review on Crop Data Management. Agronomy 2020, 10, 207. [Google Scholar] [CrossRef] [Green Version]
- Zasada, I.; Weltin, M.; Zoll, F.; Benninger, S.L. Home Gardening Practice in Pune (India), the Role of Communities, Urban Environment and the Contribution to Urban Sustainability. Urban Ecosyst. 2020, 23, 403–417. [Google Scholar] [CrossRef]
- Caputo, P.; Zagarella, F.; Cusenza, M.A.; Mistretta, M.; Cellura, M. Energy-Environmental Assessment of the UIA-OpenAgri Case Study as Urban Regeneration Project through Agriculture. Sci. Total Environ. 2020, 729, 138819. [Google Scholar] [CrossRef]
- Orsini, F.; Pennisi, G.; Michelon, N.; Minelli, A.; Bazzocchi, G.; Sanyé-Mengual, E.; Gianquinto, G. Features and Functions of Multifunctional Urban Agriculture in the Global North: A Review. Front. Sustain. Food Syst. 2020, 4, 562513. [Google Scholar] [CrossRef]
- FAO. Urban and Peri-Urban Agriculture. FAO: Rome, Italy, 1999. [Google Scholar]
- Langemeyer, J.; Madrid-Lopez, C.; Mendoza Beltran, A.; Villalba Mendez, G. Urban Agriculture—A Necessary Pathway towards Urban Resilience and Global Sustainability? Landsc. Urban Plan. 2021, 210, 104055. [Google Scholar] [CrossRef]
- Tapia, C.; Randall, L.; Wang, S.; Aguiar Borges, L. Monitoring the Contribution of Urban Agriculture to Urban Sustainability: An Indicator-Based Framework. Sustain. Cities Soc. 2021, 74, 103130. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Autonomous Mowers | ||||||
|---|---|---|---|---|---|---|
| Automower® 310 (AM1) | Automower® 550 (AM2) | Automower® 535 (AM3) 1 | ||||
| Type of engine | electric | electric | electric | |||
| Dimensions (lenght × height × width) | cm | 63 × 25 × 51 | 72 × 31 × 56 | 93 × 29 × 55 | ||
| Vehicle weight | kg | 9 | 13.9 | 17.3 | ||
| Number of driving wheels | 2 | 2 | 4 | |||
| Cutting width | cm | 22 | 24 | 22 | ||
| Working capacity | m2⋅day−1 | 1000 ± 20% | 5000 ± 20% | 3500 ± 20% | ||
| Average mowing time on one recharge | min | 70 | 270 | 100 | ||
| Average charging time | min | 60 | 60 | 30 | ||
| Blade motor speed | rpm | 2300 | 2300 | 2475 | ||
| Total power consumption during mowing 2 | W | 25 ± 20% | 35 ± 20% | 40 ± 20% | ||
| Max active time per day 3 | min⋅day−1 | 1080 | 1440 | 1440 | ||
| Standby time per day | min⋅day−1 | 360 | 0 | 0 | ||
| Forward speed | m⋅s−1 | 0.38 | 0.65 | 0.61 | ||
| Percentage of Area Mowed (%) | ||||||||
|---|---|---|---|---|---|---|---|---|
| Autonomous Mower Type | ||||||||
| Mowing Time (min) | AM1 | AM2 | AM3 | LSD | p-Value | |||
| 30 | 23.27 | 28.33 | 26.15 | ns | ||||
| 60 | 40.18 | b | 48.84 | a | 43.06 | ab | 0.582 | . |
| 90 | 54.58 | b | 61.85 | a | 57.50 | ab | 0.466 | . |
| 120 | 64.19 | b | 72.42 | a | 64.39 | ab | 0.358 | * |
| 150 | 73.20 | b | 79.54 | a | 74.34 | ab | 0.307 | . |
| 180 | 78.75 | b | 83.83 | a | 80.41 | ab | 0.214 | * |
| Effective Time (min) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Autonomous Mower | d | e | ET50 | ET80 | ||||||
| AM1 | 98.275 | (4.025) | 111.144 | (8.265) | 77.039 | (5.729) | 178.879 | (13.302) | ||
| AM2 | 94.808 | (2.504) | 83.616 | (4.739) | 57.958 | (3.285) | 134.575 | (7.627) | ||
| AM3 | 93.803 | (3.066) | 94.544 | (6.149) | 65.533 | (4.262) | 152.163 | (9.896) | ||
| Autonomous Mower Type | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| AM1 | AM2 | AM3 | ||||||||||
| Unit | Values | |||||||||||
| Effective mowing time per day | h | 9.71 | 19.64 | 18.47 | ||||||||
| Effective charging time per day | h | 8.29 | 4.36 | 5.53 | ||||||||
| Effective time for mowing 150 m2 1 | h | 2.98 | 2.24 | 2.54 | ||||||||
| Mowable area per day 2 | m2 | 488.30 | 1313.22 | 1092.45 | ||||||||
| Mowable area per week | m2 | 1709.03 | 4596.28 | 3823.57 | ||||||||
| Weekly electric energy consumption during mowing | kWh⋅week−1 | 1.70 | 4.81 | 5.17 | ||||||||
| Annually electric energy consumption during mowing | kWh⋅year−1 | 30.57 | 86.60 | 93.09 | ||||||||
| Annually electric energy consumption considering the mowing of 1 ha per week | kWh⋅ha−1⋅year−1 | 178.88 | 188.41 | 243.46 | ||||||||
| Number of autonomous mowers required to mow 1 ha per week | 5.85 | 2.2 | 2.62 | |||||||||
| Primary energy consumption of the autonomous mowers per year | kWh⋅ha−1⋅year−1 | 349.77 | 368.40 | 476.05 | ||||||||
| Electric energy consumption of the charging base with the boundary wire per week | kWh·week−1 | 0.17 | 0.81 | 0.76 | ||||||||
| Electric energy consumption of the charging base with the boundary wire per year | kWh·year−1 | 3.06 | 14.60 | 13.73 | ||||||||
| Electric energy consumption of the charging bases with the boundary wires of all necessary autonomous mowers to mow 1 ha | kWh⋅ha−1·year−1 | 17.89 | 31.76 | 35.91 | ||||||||
| Primary energy consumption of the charging bases with the boundary wires per year | kWh⋅ha−1⋅year−1 | 34.98 | 62.10 | 70.22 | ||||||||
| Total primary energy consumption per year 3 | kWh⋅ha−1⋅year−1 | 384.75 | 430.50 | 546.27 | ||||||||
| Flail Mower | ||||
|---|---|---|---|---|
| Unit | Values | |||
| Hourly gasoline consumption | kg⋅h−1 | 0.75 | ||
| Estimated work capacity | m2⋅h−1 | 567.06 | ||
| Hourly Energy requirement | kWh⋅h−1 | 9.20 | ||
| Time needed to mow 1 ha | h | 17.63 | ||
| Number of treatments per year per hectare | 7 | |||
| Total mowing time per year | h | 123.44 | ||
| Primary energy consumption per year | kWh⋅ha−1⋅year−1 | 1135.13 | ||
| Average Weeds Height | Weed Cover Percentage | Above-Ground Weed Biomass | Number of Artichoke Heads per Hectare | Weight of Artichoke Heads per Hectare | |
|---|---|---|---|---|---|
| Pr(>F) | Pr(>F) | Pr(>F) | Pr(>F) | Pr(>F) | |
| Factors | |||||
| Weed management systems | 0.0064 ** | 0.0007 *** | 0.0402 * | ns | ns |
| Positions | ns | ns | 0.0593 | − | − |
| Dates | ns | 0.0015 ** | ns | − | − |
| Average Weeds Height | Weed Cover Percentage | Above-Ground Weed Biomass | Number of Artichoke Heads per Hectare | Weight of Artichoke Heads per Hectare | ||||
|---|---|---|---|---|---|---|---|---|
| Weed management systems | (cm) | (%) | (g d.m.⋅m−2) | n⋅ha−1 | Mg⋅ha−1 | |||
| Autonomous mower weed management system | 3.40 | 9.41 | 71.76 | 32,098.77 | 6.58 | |||
| Conventional weed management system | 13.63 | 18.67 | 143.67 | 35,185.19 | 6.12 | |||
| Flail Mower | ||
|---|---|---|
| Unit | Values | |
| Purchase cost | EUR€ | 3280.00 |
| Depreciation of purchase cost | EUR⋅ha−1⋅year−1 | 269.92 |
| Maintenance cost | EUR | 1640.00 |
| Depreciation of maintenence cost | EUR⋅ha−1⋅year−1 | 134.96 |
| Labor cost | EUR⋅ha−1⋅year−1 | 3086.00 |
| Gasoline cost | EUR⋅ha−1⋅year−1 | 170.91 |
| Total annual cost | EUR⋅ha−1⋅year−1 | 3661.80 |
| Autonomous Mower (AM2) | ||
| Purchase cost 1 | EUR | 5190.00 |
| Depreciation of purchase cost 1 | EUR⋅year−1 | 856.23 |
| Maintenance cost 1 | EUR | 1557.00 |
| Depreciation of maintenence cost 1 | EUR⋅year−1 | 256.87 |
| Electric energy cost 1 | EUR⋅year−1 | 17.13 |
| Cost of an autonomous mower | EUR⋅year−1 | 1130.22 |
| Cost of all the autonomous mowers needed 2 | EUR⋅ha−1⋅year−1 | 2486.49 |
| Cost of the boundary wire installation 3 | EUR⋅ha−1 | 1089.99 |
| Depreciation of boundary wire installation | EUR⋅ha−1⋅year−1 | 109.00 |
| Electric energy cost of charging bases with boundary wires | EUR⋅ha−1⋅year−1 | 6.35 |
| Total annual cost | EUR⋅ha−1⋅year−1 | 2601.84 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gagliardi, L.; Sportelli, M.; Frasconi, C.; Pirchio, M.; Peruzzi, A.; Raffaelli, M.; Fontanelli, M. Evaluation of Autonomous Mowers Weed Control Effect in Globe Artichoke Field. Appl. Sci. 2021, 11, 11658. https://doi.org/10.3390/app112411658
Gagliardi L, Sportelli M, Frasconi C, Pirchio M, Peruzzi A, Raffaelli M, Fontanelli M. Evaluation of Autonomous Mowers Weed Control Effect in Globe Artichoke Field. Applied Sciences. 2021; 11(24):11658. https://doi.org/10.3390/app112411658
Chicago/Turabian StyleGagliardi, Lorenzo, Mino Sportelli, Christian Frasconi, Michel Pirchio, Andrea Peruzzi, Michele Raffaelli, and Marco Fontanelli. 2021. "Evaluation of Autonomous Mowers Weed Control Effect in Globe Artichoke Field" Applied Sciences 11, no. 24: 11658. https://doi.org/10.3390/app112411658
APA StyleGagliardi, L., Sportelli, M., Frasconi, C., Pirchio, M., Peruzzi, A., Raffaelli, M., & Fontanelli, M. (2021). Evaluation of Autonomous Mowers Weed Control Effect in Globe Artichoke Field. Applied Sciences, 11(24), 11658. https://doi.org/10.3390/app112411658