
Experimental Study on the Influence of Water and Cavitation on Propeller Load during Ice-Propeller Milling

Abstract
:1. Introduction
2. Test Model
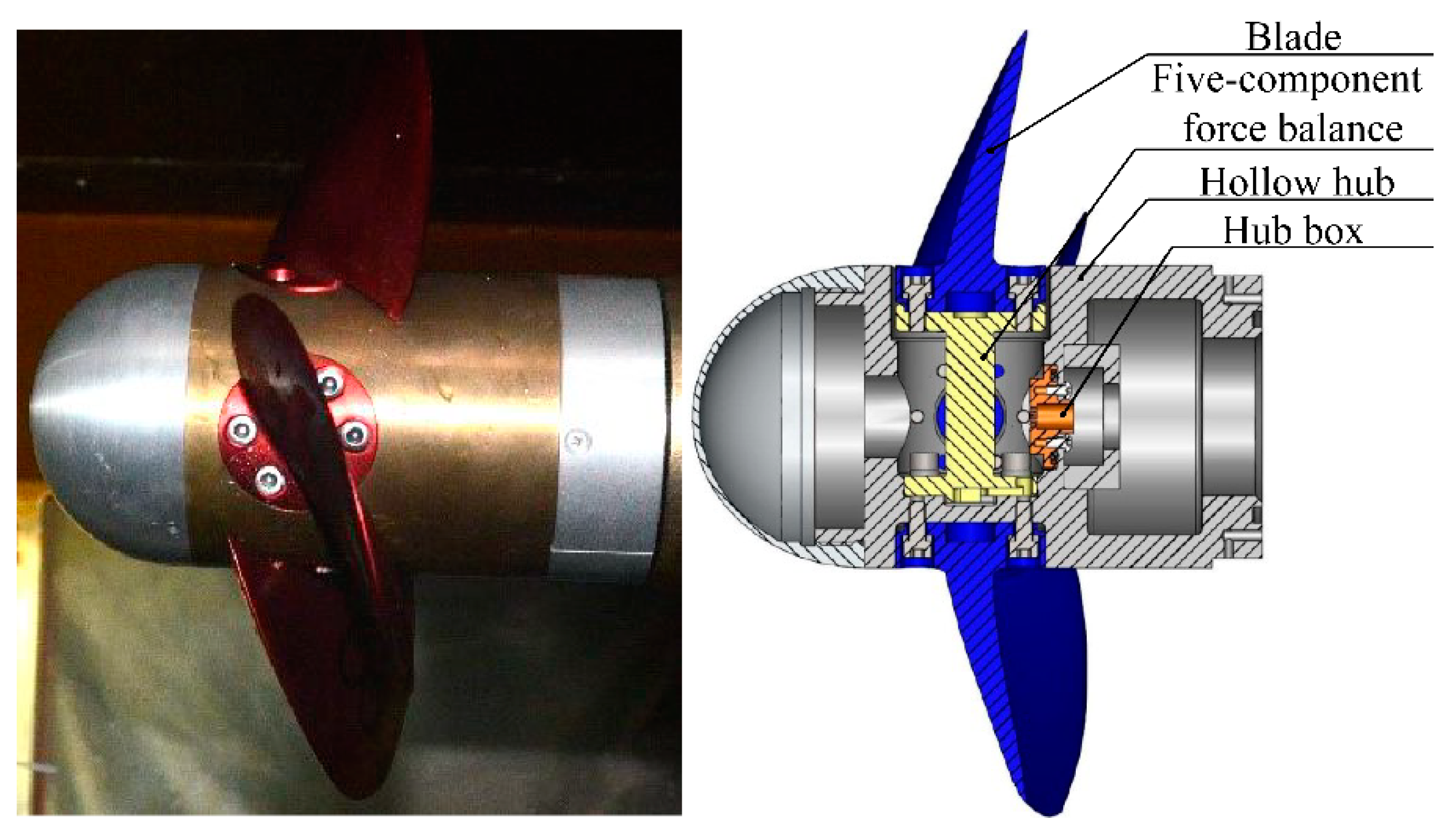
2.1. Propeller Model
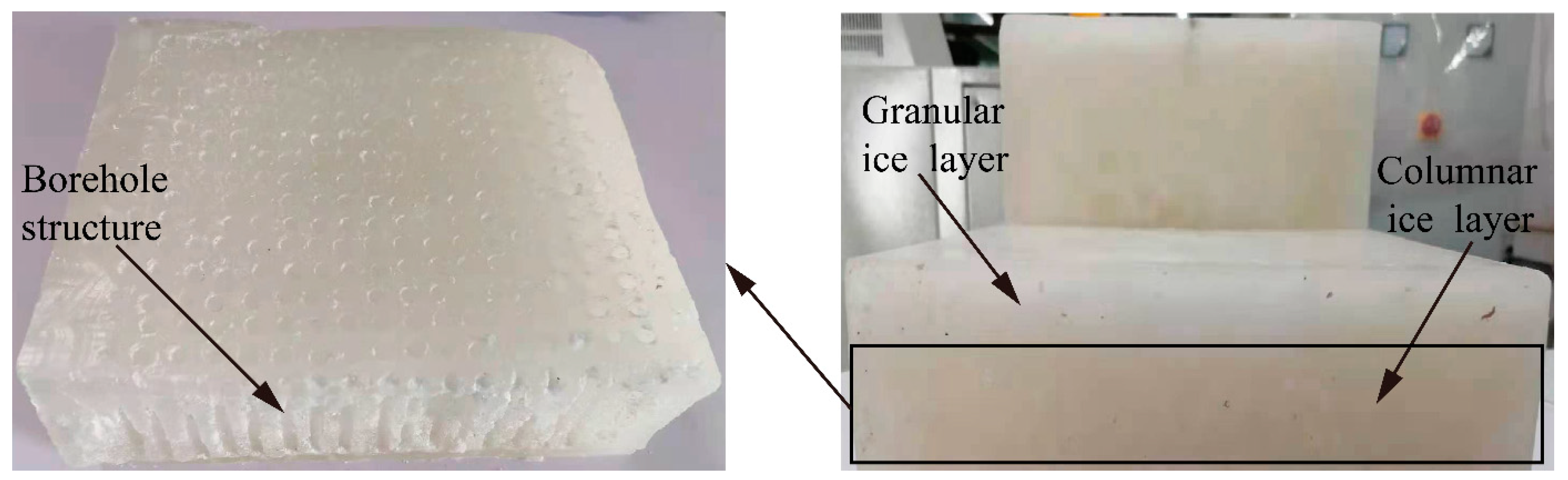
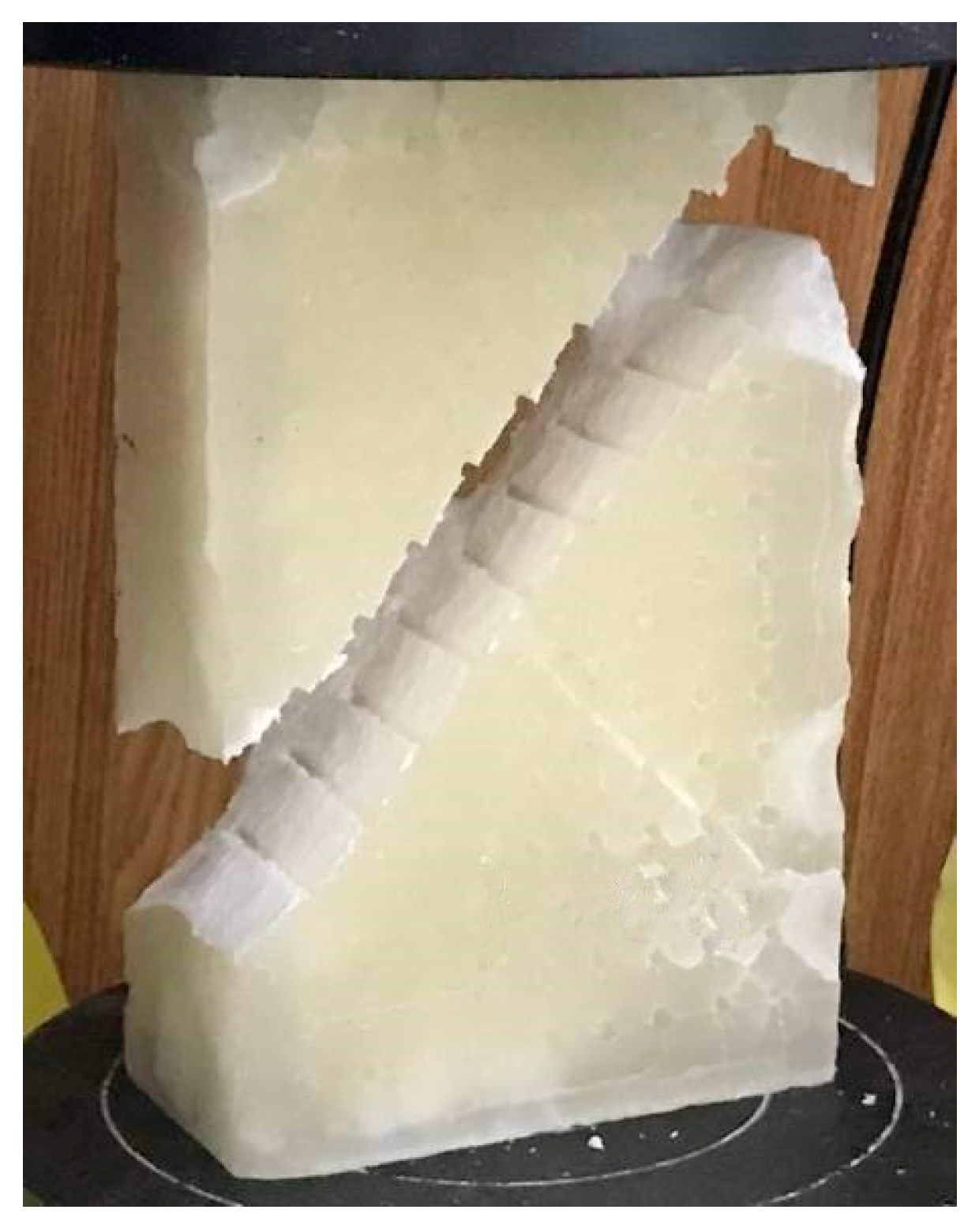
2.2. Mixed Paraffin Model Ice
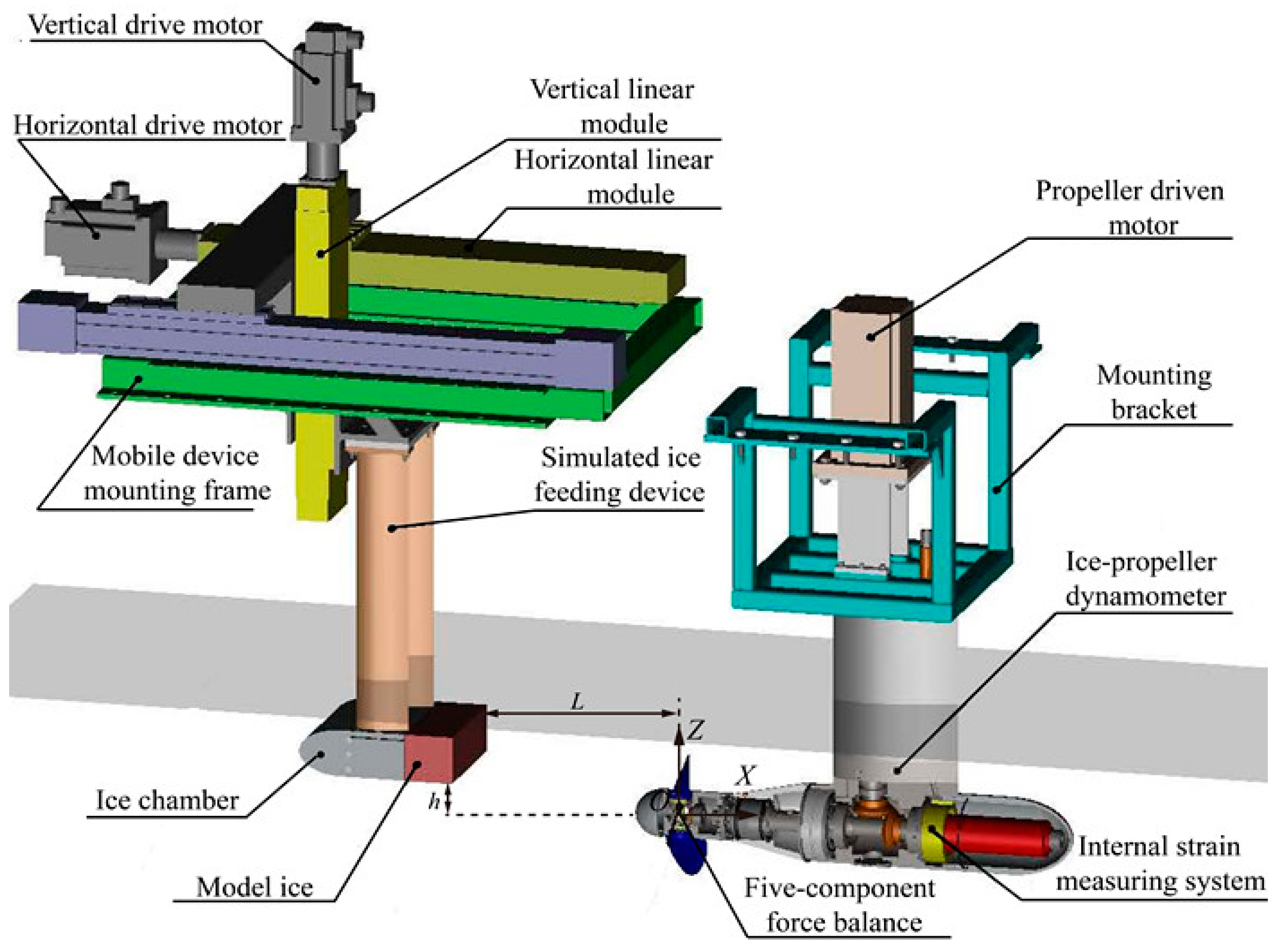
2.3. Experimental Setup
3. Test Method
3.1. Similarity Criteria
- (1)
- Geometric similarity
- (2)
- Motion similarity
- (3)
- Viscous force similarity
- (4)
- Cavitation similarity
- (5)
- Similarity with the mechanical properties of ice
3.2. Operating Conditions
4. Analysis of Experimental Results
4.1. Load Characteristic Analysis
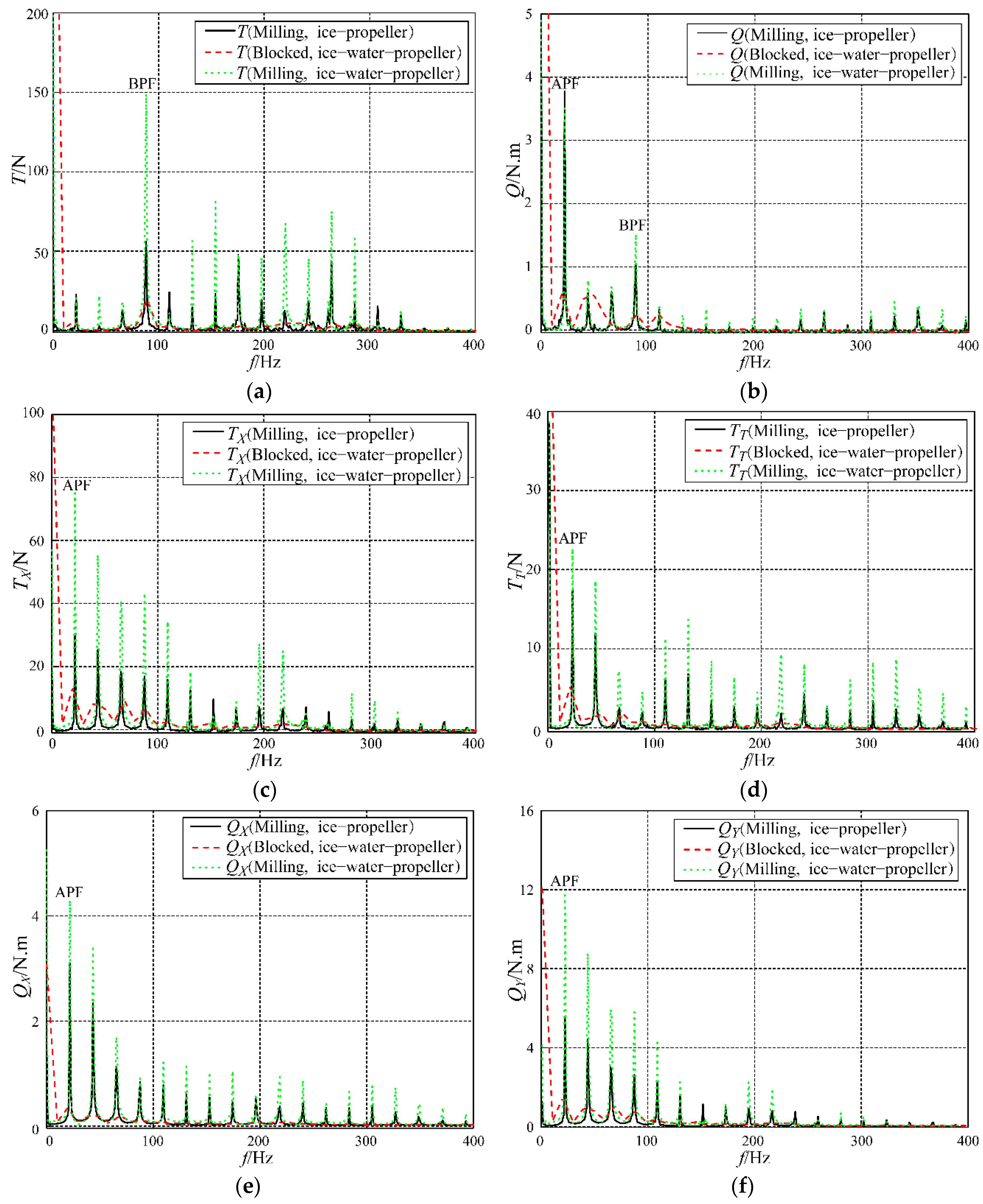
4.2. Bearing Force Analysis
5. Conclusions
- (1)
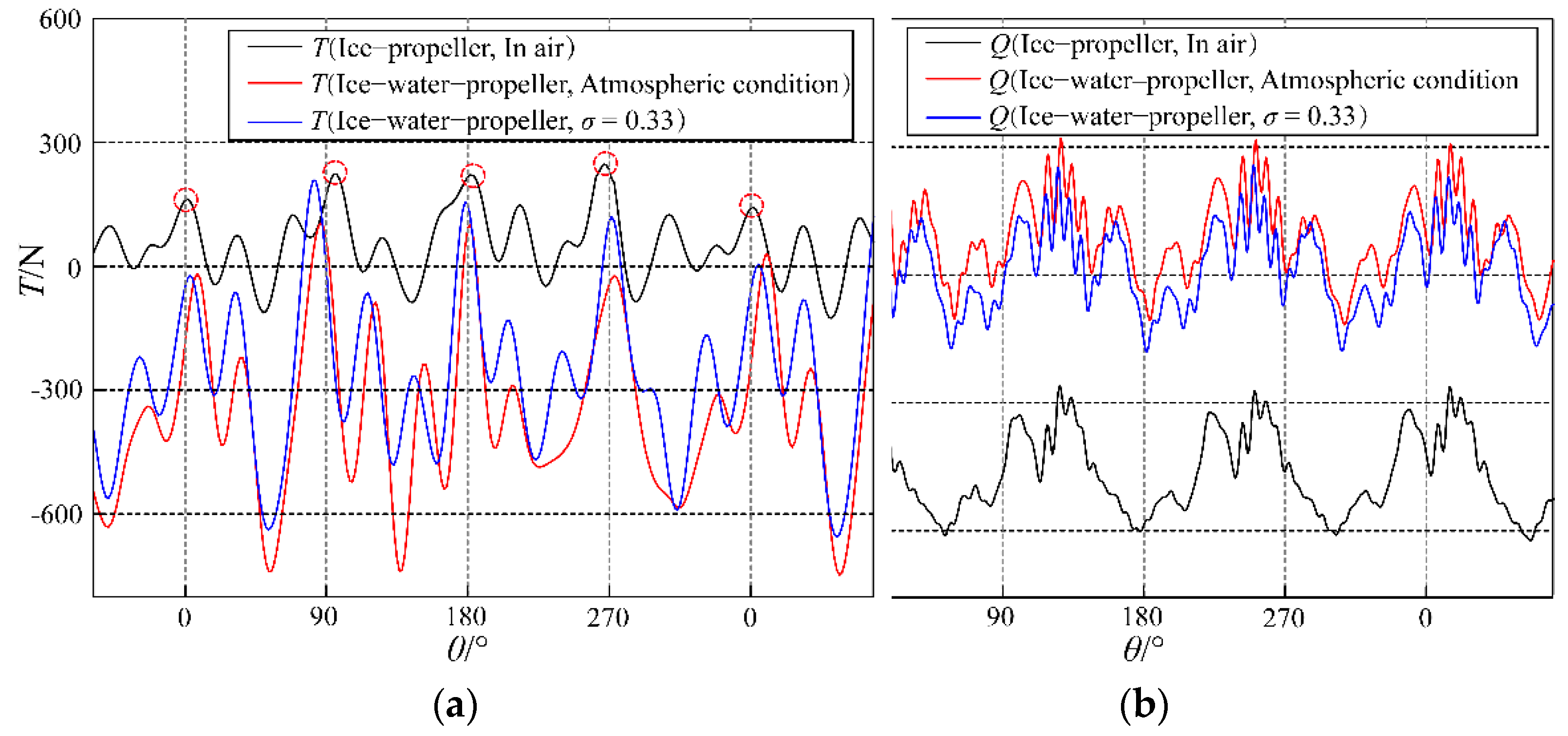
- In the ice–water propeller milling process, the presence of water causes propeller thrust and axial force generated by ice to act in opposite directions, and their combined action results in loss of propeller thrust. The water and ice have the same direction of influence on the propeller torque, and the combined action of the two causes the propeller torque to increase. The thrust and torque of the single-blade mixed load increased significantly in the presence of water. The occurrence of cavitation reduces the thrust and torque of the propeller and single-blade mixed load.
- (2)
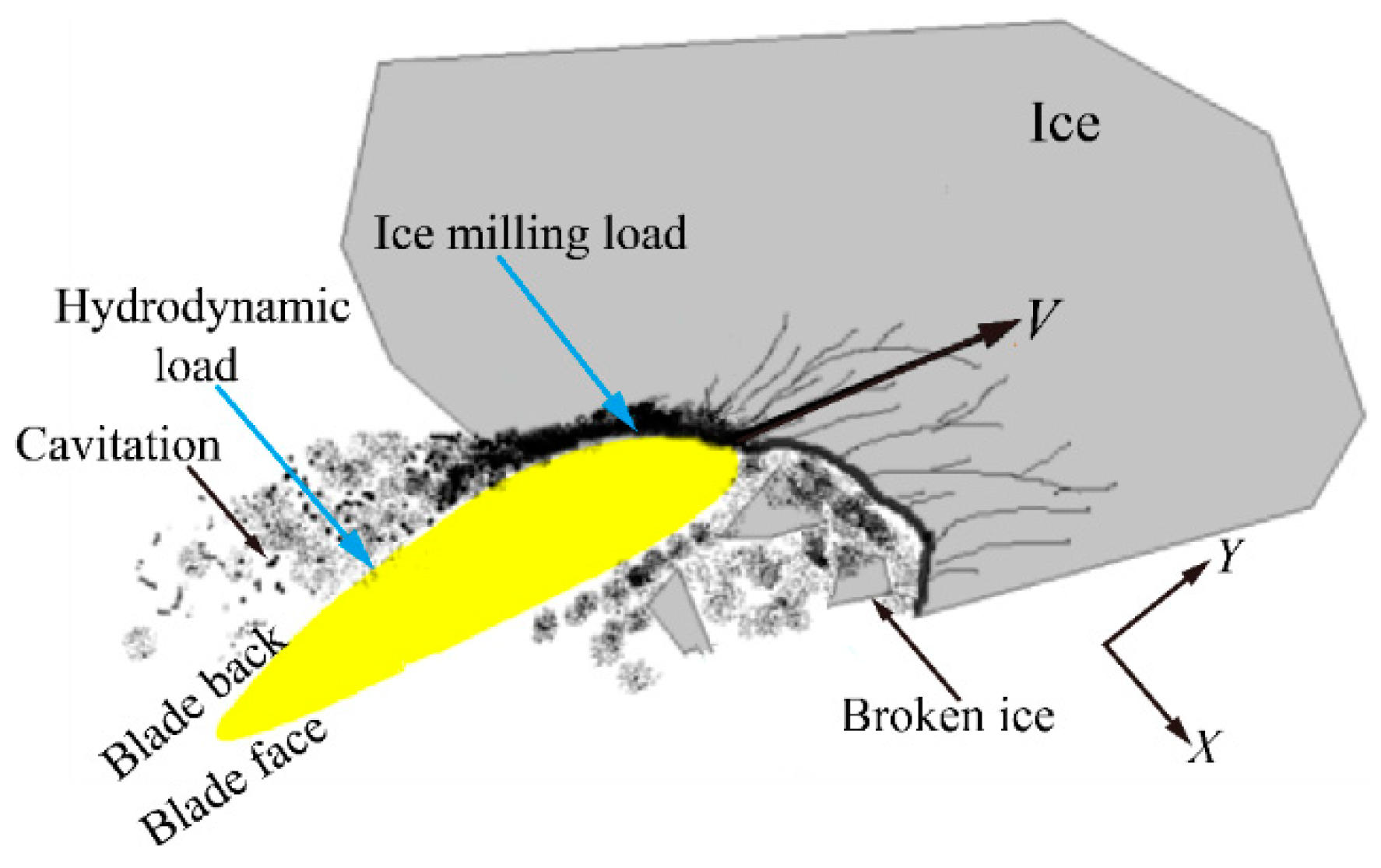
- When ice, water, and propeller interact under the decompression condition, the blockage effect of the ice block generates blade sheet cavitation. The larger the axial milling depth of the ice-propeller, the larger the area of sheet cavitation on the surface of the non-milling blade, and the thicker the tip vortex filament; moreover, the closer the blade is to the blocked area, the more evident the increase in the area of sheet cavitation on the blade surface. Compared with atmospheric pressure, the decompression environment causes the blade tip vortex to collapse in the blocked area, and the tip vortex size of the propeller wake in the blocked area evidently increased.
- (3)
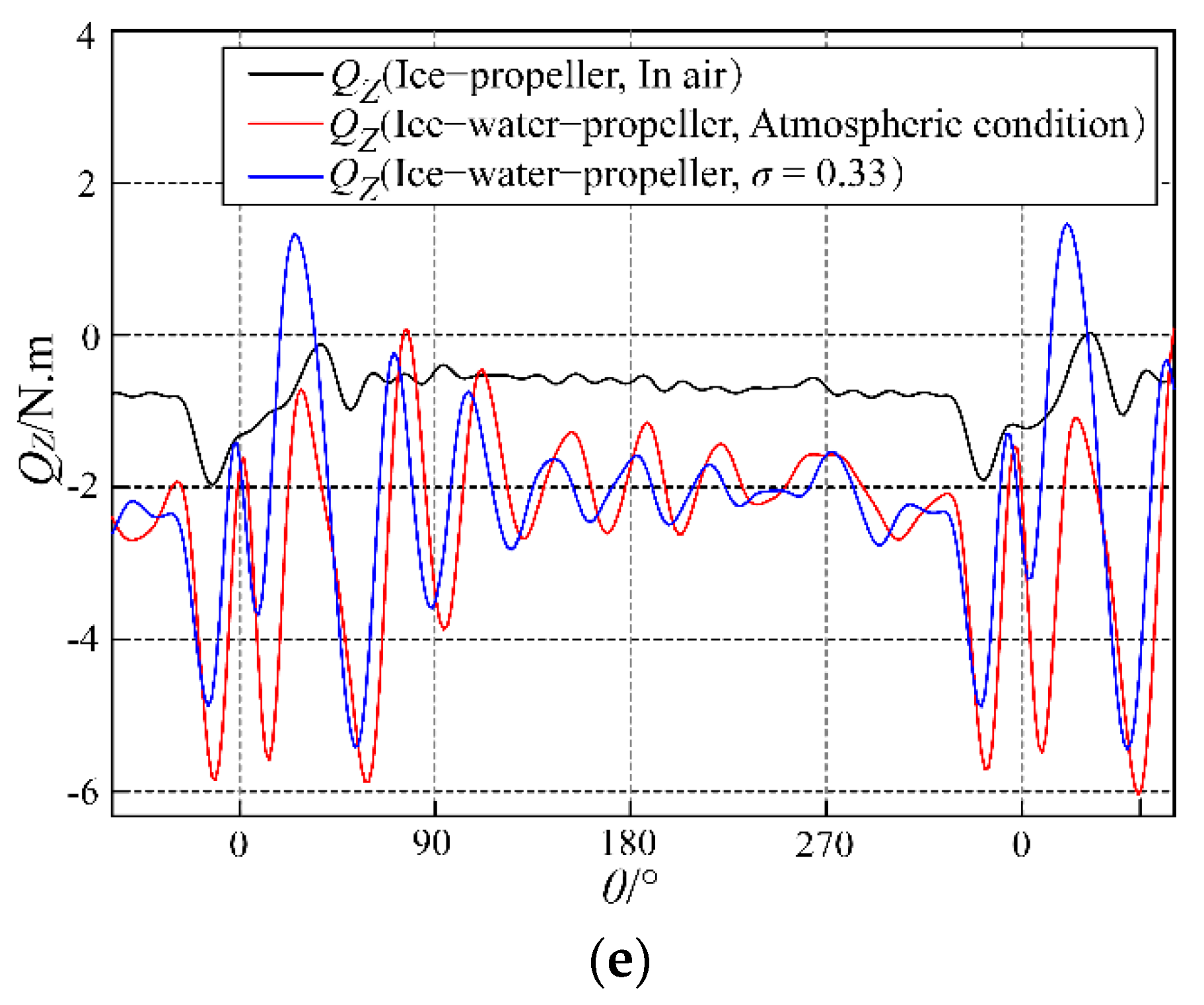
- In the analysis of the bearing forces of the propeller and blade, the presence of water causes the fluctuating amplitudes of propeller thrust and blade bearing force to increase significantly, but it has no evident effect on the fluctuating amplitude of the torque under mixed load of the propeller. Cavitation results in an increase in thrust fluctuating amplitude and a decrease in tangential force fluctuating amplitude of the single blade.
- (4)
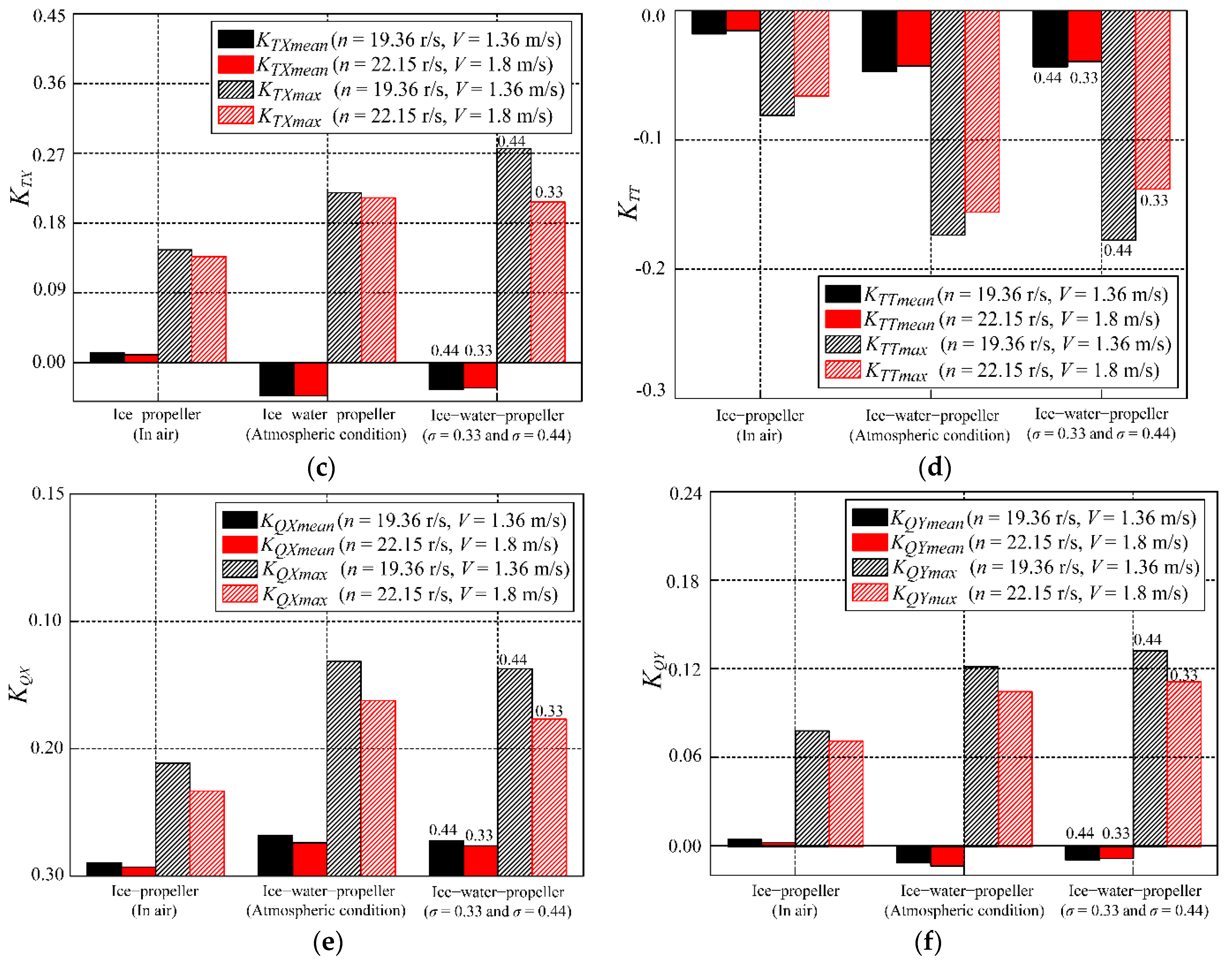
- During the ice-propeller milling in air, the higher the propeller rotational speed, the smaller the peak values of the axial force and torque of the propeller and single blade, but the greater the fluctuating amplitudes of the axial force and torque of the propeller and single blade. At atmospheric pressure, with an increase in the advance coefficient, the peak values of the thrust and torque of the propeller and single blade as well as the fluctuating amplitude of the propeller torque decrease, whereas the fluctuating amplitudes of the propeller thrust and the single-blade thrust and torque increase. Under decompression conditions, the smaller the cavitation number, the smaller the peak values of the thrust and torque of the propeller and single blade, but the larger the fluctuating amplitudes of the thrust and torque of the propeller and single blade.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kinnunen, A.; Tikanmäki, M.; Heinonen, J.; Koskinen, P. Dynamic ice contact load model for azimuthing thrusters. Ships Offshore Struct. 2019, 14, 890–898. [Google Scholar] [CrossRef]
- Matsui, S.; Uto, S.; Yamada, Y.; Watanabe, S. Numerical study on the structural response of energy-saving device of ice-class vessel due to impact of ice block. Int. J. Nav. Architect. Ocean Eng. 2018, 10, 367–375. [Google Scholar] [CrossRef]
- Walker, D.; Bose, N.; Yamaguchi, H. Influence of Cavitation on Canadian R-Class Propellers. J. Offshore Mech. Arct. 1995, 116, 185–189. [Google Scholar] [CrossRef]
- Bose, N. Ice Blocked Propeller Performance Prediction Using a Panel Method. Trans. RINA 1996, 138, 213–226. [Google Scholar]
- Morin, A.; Caron, S.; Neste, R.V.; Edgecombe, M.H. Field monitoring of the ice load of an icebreaker propeller blade using fiber optic strain gauges. In Symposium on Smart Structures and Materials; International Society for Optics and Photonics: San Diego, CA, USA, 1996; pp. 427–438. [Google Scholar]
- Moores, C.; Veitch, B.; Bose, N.; Jones, S.J.; Carlton, J. Multi-component blade load measurements on a propeller in ice. Soc. Nav. Archit. Mar. Eng. Trans. 2002, 110, 169–188. [Google Scholar]
- Searle, S.; Veitch, B.; Bose, N. Experimental investigation of a highly skewed propeller in ice. Offshore Mech. Arct. Eng. 2001, 123, 191–197. [Google Scholar] [CrossRef]
- Wang, J.Y.; Akinturk, A.; Bose, N.; Jones, S.J.; Song, Y.Y.; Chun, H.H.; Kim, M.C. Experimental study on a model azimuthing podded propulsor in ice. J. Mar. Sci. Technol. 2008, 13, 244–255. [Google Scholar] [CrossRef]
- Karulina, M.M.; Karulin, E.B.; Belyashov, V.A.; Belov, I.M. Assessment of Periodical Ice Loads Acting on Screw Propeller during its Interaction with Ice. In Proceedings of the International Conference and Exhibition on Performance of Ships and Structures in Ice, Banff, AB, Canada, 20–23 July 2008; pp. 1–7. [Google Scholar]
- Brouwer, J.; Hagesteijn, G.; Bosman, R. Propeller-ice impacts measurements with a six-component blade load sensor. In Proceedings of the Third International Symposium on Marine Propulsorssmp, Tasmania, Australia, 5–8 May 2013; pp. 47–54. [Google Scholar]
- Khan, A.G.; Hisette, Q.; Streckwall, H.; Liu, P.F. Numerical investigation of propeller-ice interaction effects. Ocean Eng. 2020, 216, 107716. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, D.S.; Sun, J.Q. Model test of propeller-ice milling process under typical navigation mode of polar ships. J. Exp. Mech. 2020, 35, 1003–1013. (In Chinese) [Google Scholar]
- Wu, S.; Song, M.T.; Rui, W. Application of high-speed photography and hydrodynamic synchronous measurement in model tests of ice-propeller collision. J. Vib. Shock 2021, 40, 161–166. (In Chinese) [Google Scholar]
- Atlar, M.; Prasetyawan, I.; Aryawan, W.D.; Wang, D.Z.; Sasaki, N. Cavitation in Ice-Milling with a Podded Propulsor. In Proceedings of the 4th Asme/jsme Joint Fluids Summer Engineering Conference, Honolulu, HI, USA, 6–10 July 2003; pp. 269–278. [Google Scholar]
- Sampson, R.; Atlar, M.; Sasaki, N. Propeller Ice Interaction-Effect of Blockage Proximity. In Proceedings of the First International Symposium on Marine Propulsors smp’09, Trondheim, Norway, 22–24 June 2009. [Google Scholar]
- Sampson, R.; Atlar, M.; St John, J.W.; Sasaki, N. Podded propeller ice interaction in a cavitation tunnel. In Proceedings of the Third International Symposium on Marine Propulsors SMP, Launceston, TAS, Australia, 5–8 May 2013; pp. 34–46. [Google Scholar]
- Huisman, T.J.; Bose, R.W.; Brouwer, J.; Hagesteijn, G.; de Koning Gans, H.J. Interaction between Warm Model Ice and a Propeller. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; pp. 8–19. [Google Scholar]
- Guo, C.Y.; Xu, P.; Zhao, D.G.; Luo, W.Z.; Song, M.Y. Test of contact loads during propeller-ice milling process. J. Harbin Eng. Univ. 2018, 39, 1172–1178. (In Chinese) [Google Scholar]
- Wang, J.; Akinturk, A.; Bose, N. Numerical Prediction of Propeller Performance during Propeller-Ice Interaction. Mar. Technol. 2009, 46, 123–139. [Google Scholar] [CrossRef]
- Wang, F.; Zou, Z.J.; Zhou, L.; Wang, Y.; Yu, H.; Zhang, H.H. Numerical simulation of ice milling loads on propeller blade with cohesive element method. Brodogradnja 2019, 70, 109–128. [Google Scholar] [CrossRef]
- Ye, L.Y.; Wang, C.; Chang, X.; Zhang, H.Y. Propeller-ice Contact Modeling with Peridynamics. Ocean Eng. 2017, 139, 54–64. [Google Scholar] [CrossRef]
- Ye, L.Y.; Guo, C.Y.; Wang, C.; Wang, C.H. Prediction of the dynamic pressure distribution on a propeller blade under ice milling. Ocean Eng. 2019, 188, 106284. [Google Scholar] [CrossRef]
- Wang, C.; Xiong, W.P.; Chang, X.; Ye, L.Y.; Li, X. Analysis of variable working conditions for propeller-ice interaction. Ocean Eng. 2018, 156, 277–293. [Google Scholar] [CrossRef]
- Yang, D.B.; Ji, S.Y. Analysis of sea ice milling with propeller based on coupled DEM-FEM model. Ocean Eng. 2021, 39, 134–143. (In Chinese) [Google Scholar]
- Wang, C.; Hu, X.H.; Tian, T.P.; Guo, C.Y.; Wang, C.H. Numerical simulation of ice loads on a ship in broken ice fields using an elastic ice model. Int. J. Nav. Archit. Ocean Eng. 2020, 12, 414–427. [Google Scholar] [CrossRef]
- Tian, Y.F.; Huang, Y. Non Frozen Model Ice Preparation Method with Columnar Texture Features: China. CN110779250B. 25 September 2020. Available online: https://t.cnki.net/kcms/detail?v=kxaUMs6x74I2jr5WTdXti3zQ9F92xu0rndOfNvsE3i8yuDfLlQZcrV5SKNhOn05gPqicRgPRmJZw8tvYrI9oIX4eJphCsV8&uniplatform=NZKPT (accessed on 1 December 2021).
- Timco, G.W.; Weeks, W.F. A review of the engineering properties of sea ice. Cold Reg. Sci. Technol. 2010, 60, 107–129. [Google Scholar] [CrossRef]
- Waal, R.D.; Bekker, A.; Heyns, P.S. Indirect load case estimation for propeller-ice moments from shaft line torque measurements. Cold Reg. Sci. Technol. 2018, 151, 237–248. [Google Scholar] [CrossRef] [Green Version]
- Williams, F.M.; Spencer, D.; Mathews, S.T.; Bayly, I. Full Scale trials in Level Ice with Canadian R-Class Icebreaker. Soc. Nav. Archit. Mar. Eng. Trans. 1992, 100, 293–313. [Google Scholar]
- Xiong, W.P.; Wang, C.; Wang, C.H.; Ma, Q.W.; Xu, P. Analysis of shadowing effect of propeller-ice milling conditions with peridynamics. Ocean Eng. 2020, 195, 106591. [Google Scholar] [CrossRef]
- Wang, C.; Sun, S.X.; Chang, X.; Ye, L.Y. Numerical simulation of hydrodynamic performance of ice class propeller in blocked flow–using overlapping grids method. Ocean Eng. 2017, 141, 418–426. [Google Scholar]
- Guo, C.Y.; Xu, P.; Wang, C.; Wang, L.Z.; Zhang, C.S. Influence of Ice Size Parameter Variation on Hydrodynamic Performance of Podded Propulsor. China Ocean Eng. 2020, 34, 30–45. [Google Scholar] [CrossRef]
- Wu, S.; Rui, W.; Zeng, Z.B. Investigation on the characteristics of cavitation excited force of propeller in ice block condition. Ship Sci. Technol. 2019, 41, 21–26. [Google Scholar]
- Sheng, Z.B.; Liu, Y.Z. Cavitation phenomenon on leaf cut surface and its effect on performance. In Ship Principle; Shanghai Jiaotong University Press: Shanghai, China, 2013; pp. 68–70. (In Chinese) [Google Scholar]
- Polić, D.; Ehlers, S.; Æsøy, V. Propeller torque load and propeller shaft torque response correlation during ice-propeller interaction. J. Mar. Sci. Appl. 2017, 16, 1–9. [Google Scholar] [CrossRef]
- There’s Something Wrong with the Second Boat! A Major Breakthrough in Russia’s Arctic Energy Strategy. Available online: http://www.eworldship.com/html/2021/ship_inside_and_outside_0124/167393.html (accessed on 24 January 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diameter/m | 0.25 | λ | 1:16.46 | Number of Blades | 4 |
|---|---|---|---|---|---|
| Rake/° | 10 | Hub ratio | 0.368 | Pitch ratio (0.7R) | 0.775 |
| Blade area ratio | 0.699 | Material | Aluminum | Direction of rotation | Right |
| Cavitation Number of Rotational Speed at 0.8R | Advance Coefficient J | Full-Scale Propeller Rotational Speed ns (r/s) | Full-Scale Ship Speed Vs (m/s) |
|---|---|---|---|
| σ = 0.33 | 0.325 | 162 | 3.61 |
| σ = 0.44 | 0.281 | 141 | 2.72 |
| Test Conditions | Depth of Cut h/D | Cavitation Number of Rotational Speed at 0.8R | Ice Moving Speed V (mm/s) | Advance Coefficient J | Rotational Speed nm (r/s) | Inflow Speed Vm (m/s) |
|---|---|---|---|---|---|---|
| Case 1 | 1/16 | Air | 30 | 0 | 19.36 | 0 |
| Case 2 | 1/16 | Atmospheric pressure | 30 | 0.281 | 19.36 | 1.36 |
| Case 3 | 1/16 | σ = 0.44 | 30 | 0.281 | 19.36 | 1.36 |
| Case 4 | 1/16 | Air | 30 | 0 | 22.15 | 0 |
| Case 5 | 1/16 | Atmospheric pressure | 30 | 0.325 | 22.15 | 1.8 |
| Case 6 | 1/16 | σ = 0.33 | 30 | 0.325 | 22.15 | 1.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, P.; Wang, C.; Ye, L. Experimental Study on the Influence of Water and Cavitation on Propeller Load during Ice-Propeller Milling. Appl. Sci. 2021, 11, 11578. https://doi.org/10.3390/app112411578
Xu P, Wang C, Ye L. Experimental Study on the Influence of Water and Cavitation on Propeller Load during Ice-Propeller Milling. Applied Sciences. 2021; 11(24):11578. https://doi.org/10.3390/app112411578
Chicago/Turabian StyleXu, Pei, Chao Wang, and Liyu Ye. 2021. "Experimental Study on the Influence of Water and Cavitation on Propeller Load during Ice-Propeller Milling" Applied Sciences 11, no. 24: 11578. https://doi.org/10.3390/app112411578
APA StyleXu, P., Wang, C., & Ye, L. (2021). Experimental Study on the Influence of Water and Cavitation on Propeller Load during Ice-Propeller Milling. Applied Sciences, 11(24), 11578. https://doi.org/10.3390/app112411578