
Applying Machine Learning Models to First Responder Collisions Beside Roads: Insights from “Two Vehicles Hit a Parked Motor Vehicle” Data

 ,
,  ,
,
Abstract
1. Introduction
2. Background
2.1. Factors Influencing Road Traffic Collisions
2.2. First Responder’s Collisions
3. Materials and Methods
3.1. Data
3.2. Methodology and Algorithms
4. Result and Discussion
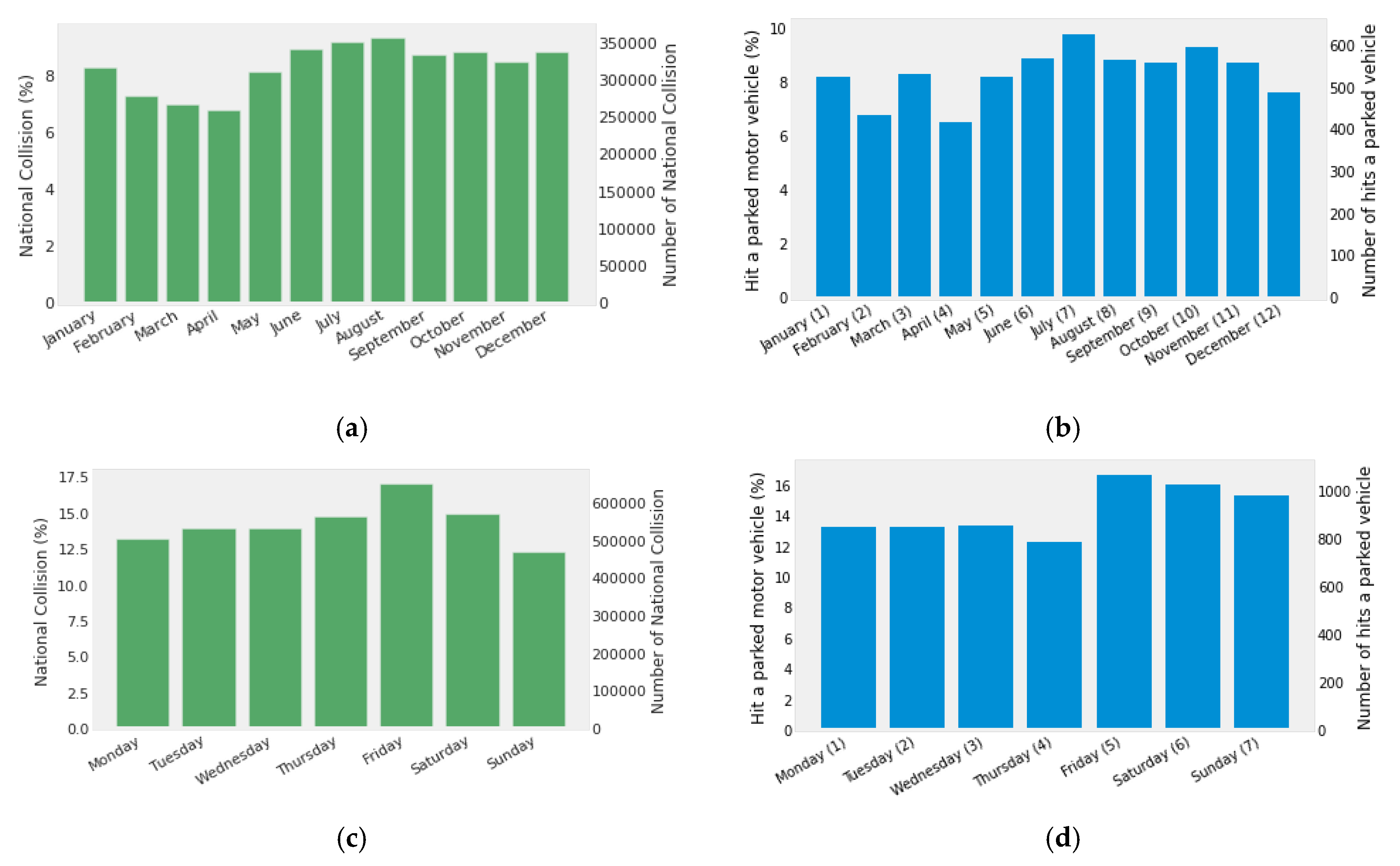
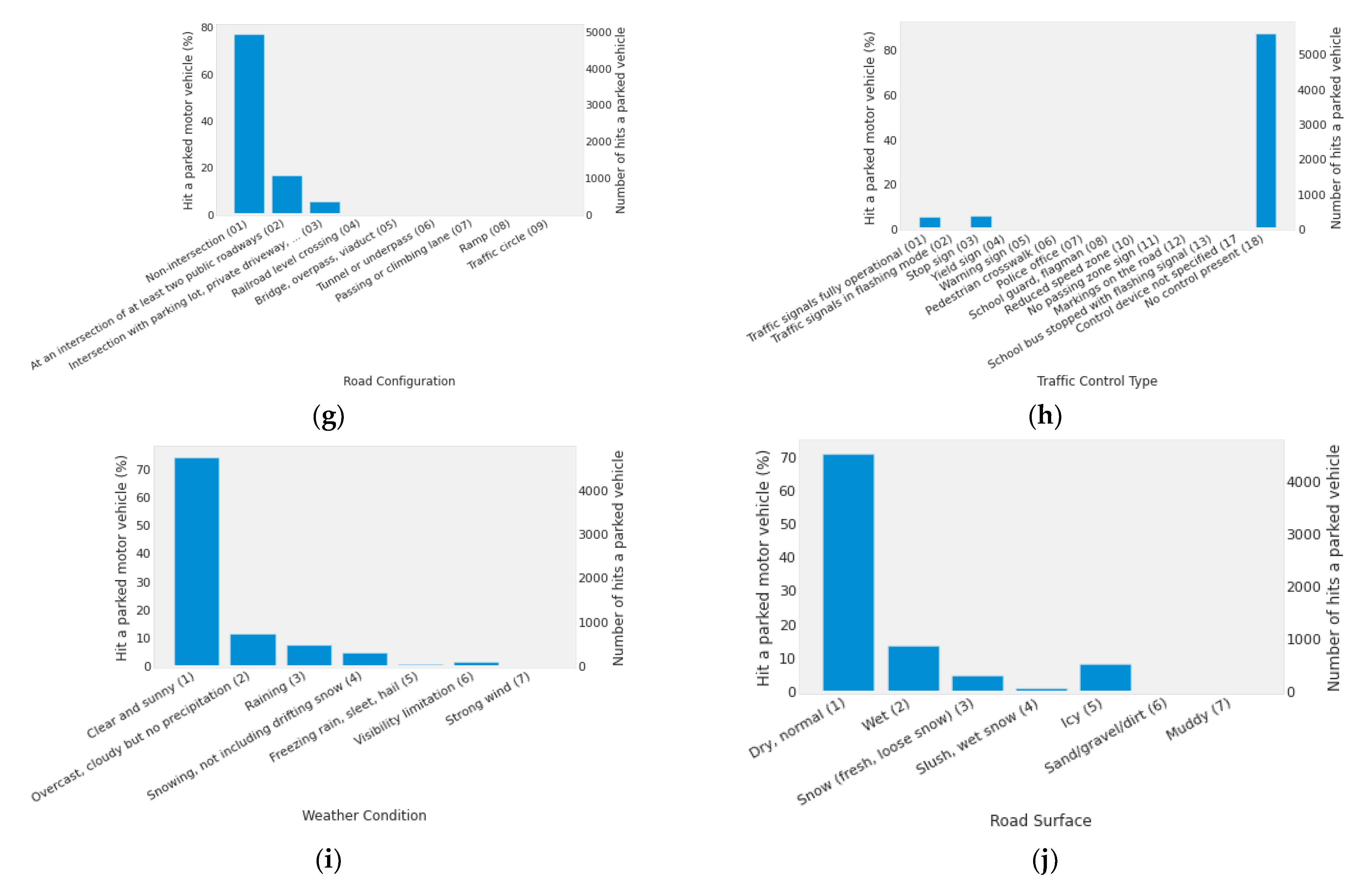
4.1. Findings on Established Factors in Roadside Collision Research
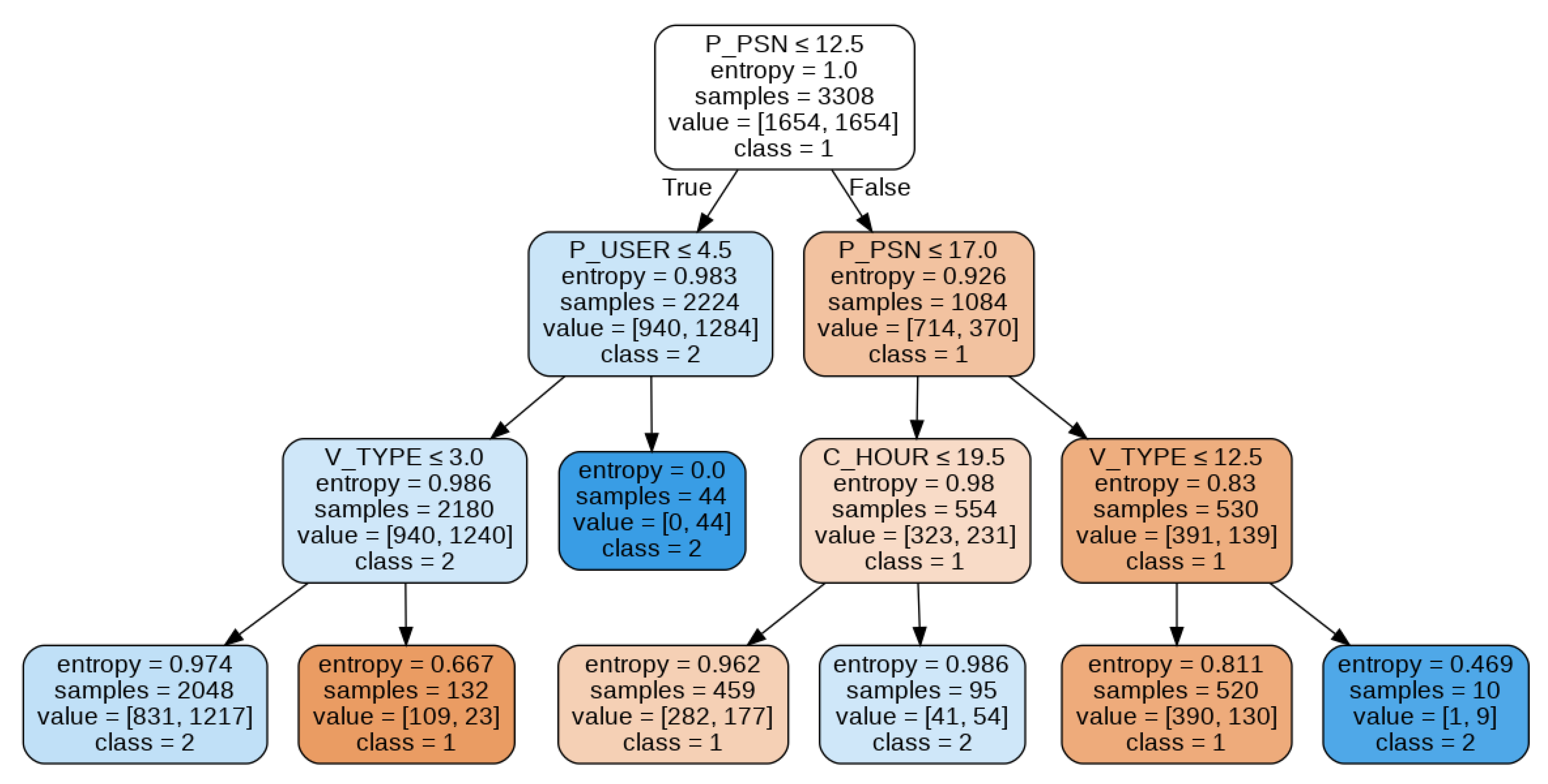
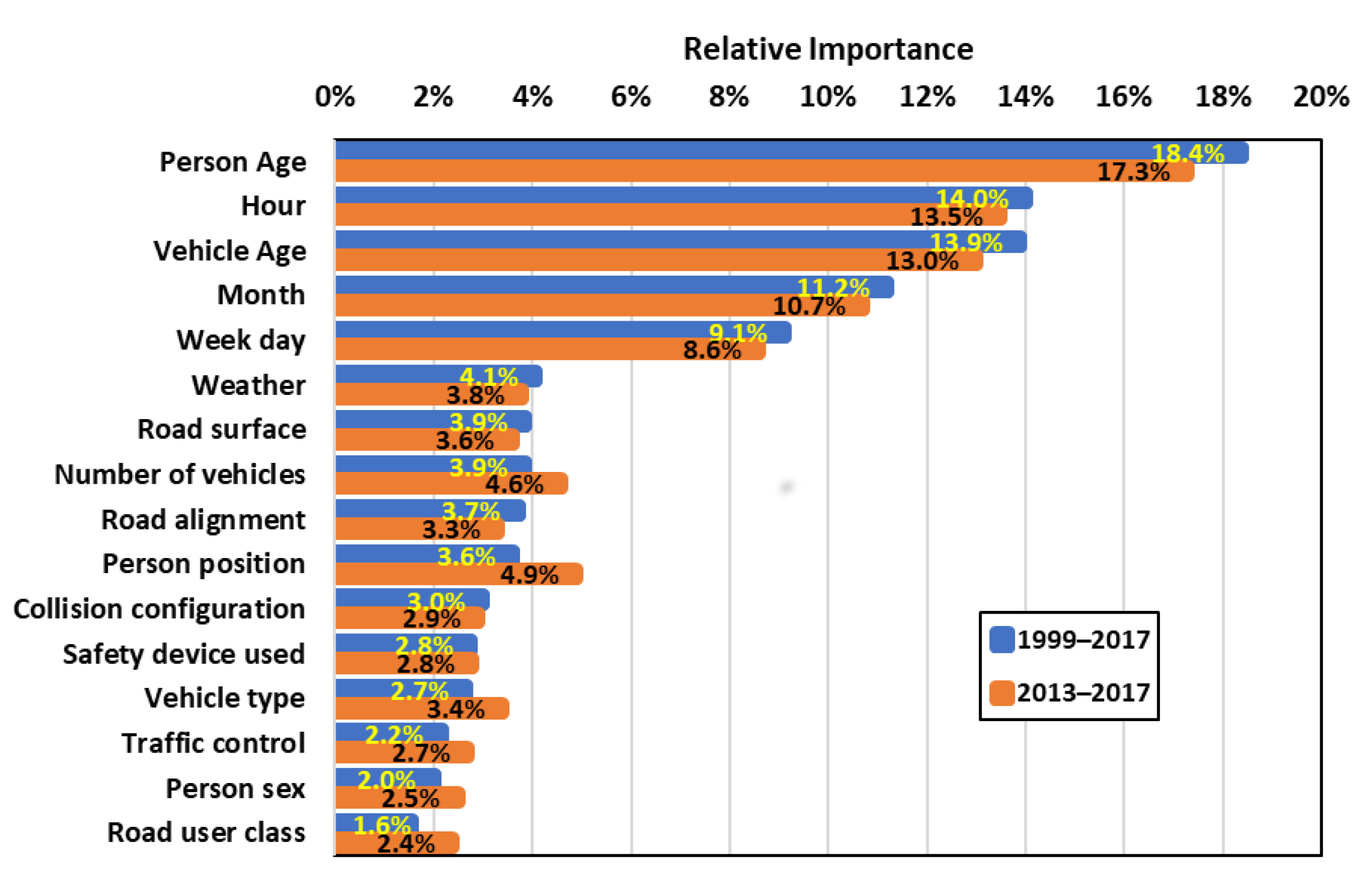
4.2. Examining Predictions through the Machine Learning Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Federal Bureau of Investigation. Law Enforcement Officers Killed and Assaulted; U.S. Department of Justice: Washington, DC, USA, 2017.
- Federal Bureau of Investigation. Law Enforcement Officers Accidentally Killed- Type of Accident and Activity of Victim Officer at Time of Incident; U.S. Department of Justice: Washington, DC, USA, 2018.
- International Association of Fire Fighters. Best Practices for Emergency Vehicle and Roadway Operations Safety in the Emergency Services; International Association of Fire Fighters: Washington, DC, USA, 2010; ISBN 0-942920-52-X. [Google Scholar]
- LaTourrette, T. Risk factors for injury in law enforcement officer vehicle crashes. Polic. Int. J. Police Strateg. Manag. 2015, 38, 478–504. [Google Scholar] [CrossRef]
- US Fire Administration. Traffic Incident Management Systems; United States Department of Homeland Security: Washington, DC, USA, 2012.
- Fahy, R.; Molis, J. Firefighter Fatalities in the United States; National Fire Protection Association: Quincy, MA, USA, 2019. [Google Scholar]
- Komackova, L.; Poliak, M. Factors affecting the road safety. J. Commun. Comput. 2016, 13, 146–152. [Google Scholar] [CrossRef][Green Version]
- Mohanty, M.; Gupta, A. Factors affecting road crash modeling. J. Transp. Lit. 2015, 9, 15–19. [Google Scholar] [CrossRef]
- Cantillo, V.; Garcés, P.; Márquez, L. Factors influencing the occurrence of traffic accidents in urban roads: A combined gis-empirical bayesian approach. DYNA 2016, 83, 21–28. [Google Scholar] [CrossRef]
- Zhang, G.; Cao, L.; Hu, J.; Yang, K.H. A field data analysis of risk factors affecting the injury risks in vehicle-to-pedestrian crashes. Ann. Adv. Automot. Med. 2008, 52, 199–214. [Google Scholar] [PubMed]
- Vodden, K.; Smith, D.; Eaton, F.; Mayhew, D. Analysis and Estimation of the Social Cost of Motor Vehicle Collisions in Ontario: Final Report; Transport Canada: Ottawa, ON, Canada, 2007. [Google Scholar]
- Redelmeier, D.A.; Tibshirani, R.J.; Evans, L. Traffic-law enforcement and risk of death from motor-vehicle crashes: Case-crossover study. Lancet 2003, 361, 2177–2182. [Google Scholar] [CrossRef]
- Tay, R.; Rifaat, S.M. Factors contributing to the severity of intersection crashes. J. Adv. Transp. 2007, 41, 245–265. [Google Scholar] [CrossRef]
- Savolainen, P.T.; Dey, K.C.; Ghosh, I.; Karra, T.L.; Lamb, A. Investigation of Emergency Vehicle Crashes in the State of Michigan; Purdue University: West Lafayette, IN, USA, 2009. [Google Scholar]
- Sanddal, T.L.; Sanddal, N.D.; Ward, N.; Stanley, L. Ambulance crash characteristics in the US defined by the popular press: A retrospective analysis. Emerg. Med. Int. 2010, 2010, 525979. [Google Scholar] [CrossRef] [PubMed]
- Yasmin, S.; Anowar, S.; Tay, R. Injury Risk of Traffic Accidents Involving Emergency Vehicles in Alberta; University of Calgary: Calgary, AB, Canada, 2014. [Google Scholar]
- Domke, K.; Wandachowicz, K.; Zalesińska, M.; Mroczkowska, S.; Skrzypczak, P. Digital billboards and road safety. Light Eng. Archit. Environ. 2011, 87, 119–131. [Google Scholar]
- Decker, J.S.; Stannard, S.J.; McManus, B.; Wittig, S.M.; Sisiopiku, V.P.; Stavrinos, D. The impact of billboards on driver visual behavior: A systematic literature review. Traffic Inj. Prev. 2015, 16, 234–239. [Google Scholar] [CrossRef]
- Bui, D.P.; Pollack Porter, K.; Griffin, S.; French, D.D.; Jung, A.M.; Crothers, S.; Burgess, J.L. Risk management of emergency service vehicle crashes in the United States fire service: Process, outputs, and recommendations. BMC Public Health 2017, 17, 885. [Google Scholar] [CrossRef]
- Drucker, C.; Gerberich, S.G.; Manser, M.P.; Alexander, B.H.; Church, T.R.; Ryan, A.D.; Becic, E. Factors associated with civilian drivers involved in crashes with emergency vehicles. Accid. Anal. Prev. 2013, 55, 116–123. [Google Scholar] [CrossRef] [PubMed]
- Hsiao, H.; Chang, J.; Simeonov, P. Preventing emergency vehicle crashes: Status and challenges of human factors issues. Hum. Fact. 2018, 60, 1048–1072. [Google Scholar] [CrossRef]
- Thomas, P.; Frampton, R. Large and small cars in real-world crashes -patterns of use, collision types and injury outcomes. Annu. Proc. Assoc. Adv. Automot. Med. 1999, 43, 101–118. [Google Scholar]
- Petridou, E.; Moustaki, M. Human factors in the causation of road traffic crashes. Eur. J. Epidemiol. 2000, 16, 819–826. [Google Scholar] [CrossRef] [PubMed]
- NHTSA. Occupant Fatalities in Law Enforcement Vehicles Involved in Motor Vehicle Traffic Crashes; NHTSA’s National Center for Statistics and Analysis, The U.S. National Highway Traffic Safety Administration: Washington, DC, USA, 2018.
- Dumont, E.; Brémond, R.; Hautière, N. Night-time visibility as a function of headlamps beam patterns and pavement reflection properties. In Proceedings of the VISION 2008, Marseille, France, 12–18 October 2008; 8p. [Google Scholar]
- Farber, G. Seeing with Headlights; The U.S. National Highway Traffic Safety Administration: Washington, DC, USA, 2004.
- Centers for Disease Control and Prevention. Impaired Driving: Get the Facts-BAC Effects. Available online: https://www.cdc.gov/transportationsafety/impaired_driving/impaired-drv_factsheet.html (accessed on 24 August 2020).
- Pinizzotto, A.; Davis, E.; Miller, C., III. Accidentally Dead: Accidental Line-of-Duty Deaths of Law Enforcement Officers; Federal Bureau of Investigation Bulletin; United States Department of Justice: Washington, DC, USA, 2002; Volume 7, pp. 8–13.
- Transport Canada National Collision Database 1999 to 2017. Available online: https://open.canada.ca/data/en/dataset/1eb9eba7-71d1-4b30-9fb1-30cbdab7e63a (accessed on 18 June 2019).
- Al-Ghamdi, A.S. Using logistic regression to estimate the influence of accident factors on accident severity. Accid. Anal. Prev. 2002, 34, 729–741. [Google Scholar] [CrossRef]
- Sze, N.N.; Wong, S.C. Diagnostic analysis of the logistic model for pedestrian injury severity in traffic crashes. Accid. Anal. Prev. 2007, 39, 1267–1278. [Google Scholar] [CrossRef] [PubMed]
- Kashani, A.; Shariat, A. Analysis of the traffic injury severity on two-lane, two-way rural roads based on Classification tree models. Saf. Sci. 2011, 49, 1314–1320. [Google Scholar] [CrossRef]
- Montella, A.; Aria, M.; D’Ambrosio, A.; Mauriello, F. analysis of powered two-wheeler crashes in italy by classification trees and rules discovery. Accid. Anal. Prev. 2012, 49, 58–72. [Google Scholar] [CrossRef]
- Wei, X.; Shu, X.; Huang, B.; Taylor, E.L.; Chen, H. Analyzing traffic crash severity in work zones under different light conditions. J. Adv. Transp. 2017, 2017, 10. [Google Scholar] [CrossRef]
- Feurer, M.; Klein, A.; Eggensperger, K.; Springenberg, J.; Blum, M.; Hutter, F. Efficient and Robust Automated Machine Learning. In Advances in Neural Information Processing Systems; Cortes, C., Lawrence, N., Lee, D., Sugiyama, M., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2015; Volume 28, pp. 2962–2970. [Google Scholar]
- Carvalho, D.V.; Pereira, E.M.; Cardoso, J.S. Machine learning interpretability: A survey on methods and metrics. Electronics 2019, 8, 832. [Google Scholar] [CrossRef]
- Statistics Canada. Table 20-10-0001-01 New Motor Vehicle Sales. 2019. Available online: https://www150.statcan.gc.ca/t1/tbl1/en/tv.action?pid=2010000101 (accessed on 15 June 2020).
- Insurance Institute for Highway Safety (IIHS) Fatality Facts 2018, Gender. Available online: https://www.iihs.org/iihs/topics/t/general-statistics/fatalityfacts/gender (accessed on 29 March 2021).
- Chang, L.-Y.; Chien, J.-T. Analysis of driver injury severity in truck-involved accidents using a non-parametric classification tree model. Saf. Sci. 2013, 51, 17–22. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Involving Parameters |
|---|---|
| Road characteristics | Geometry (e.g., curving parameters, lane width, …) Type (e.g., local, collector, minor arterial, …) Location (land use, such as residential or economic zones, rural areas, …) Surface condition Configuration Drivers view and visibility Traffic control devices and surveillance camera Lighting condition Traffic (e.g., speed, flow, density, congestion, …) |
| Vehicle characteristics | Vehicle types Safety equipment |
| Driver characteristics | Age Gender Conditions (e.g., confusion, alcohol consumption, helmet or seat belt usage, …) Driving license (e.g., type, experience, deprivation, …) Familiarity with road |
| Environmental attributes | Weather Time |
| Category | Involving Factors | Code |
|---|---|---|
| Collision | Year | C_YEAR |
| Month | C_MNTH | |
| Day of week | C_WDAY | |
| Collision hour | C_HOUR | |
| Collision severity (At least one fatality, Non-fatal injury) | C_SEV | |
| Number of vehicles involved in collisions | C_VEHS | |
| Collision configuration (Single Vehicle in Motion, Two Vehicles in Motion-Same or Different Direction of Travel, Two Vehicles-Hit a Parked Motor Vehicle) | C_CONF | |
| Roadway configuration (e.g., Non-intersection, Intersection, Railroad level crossing, Bridge, …) | C_RCFG | |
| Weather condition (e.g., Clear and sunny, Overcast cloudy, Raining, Snowing, Freezing Rain, Sleet, Hail, Visibility limitation, Strong wind) | C_WTHR | |
| Road surface (e.g., Dry, normal, Wet, Snow, Slush, Icy, Muddy, Flooded, …) | C_RSUR | |
| Road alignment (e.g., Straight and level, Straight with gradient, Curved and level, …) | C_RALN | |
| Traffic control (e.g., Traffic signals, Stop sign, Yield sign, Warning sign, …) | C_TRAF | |
| Vehicle | Vehicle sequence number | V_ID |
| Vehicle type (e.g., Light Duty Vehicle, Panel/cargo van, Bicycle, …) | V_TYPE | |
| Vehicle model year | V_YEAR | |
| Person | Person sequence number | P_ID |
| Person sex (Female, Male, Unknown) | P_SEX | |
| Person’s age | P_AGE | |
| Person position (e.g., Driver, Front row, Second row, Third row, Position, Sitting on someone’s lap, Outside passenger compartment, Pedestrian) | P_PSN | |
| Medical treatment required (e.g., No Injury, Injury, Fatality) | P_ISEV | |
| Safety device used (e.g., No safety device, Helmet worn, Reflective clothing worn, …) | P_SAFE | |
| Road user class (e.g., Motor Vehicle Driver, Motor Vehicle Passenger, Pedestrian, Bicyclist, Motorcyclist) | P_USER |
| Rank | Classifier | Test Score | Balanced Accuracy | Precision | Recall | f1 | Custom Error |
|---|---|---|---|---|---|---|---|
| 1 | AdaBoost (Adaptive Boosting) | 0.64 | 0.64 | 0.60 | 0.75 | 0.67 | 0.36 |
| 2 | RF (Random Forest) | 0.62 | 0.62 | 0.61 | 0.60 | 0.61 | 0.38 |
| 3 | LDA (Linear Discriminant Analysis) | 0.62 | 0.62 | 0.59 | 0.73 | 0.65 | 0.38 |
| 4 | Extra Trees | 0.62 | 0.62 | 0.60 | 0.62 | 0.61 | 0.38 |
| 4 | MLP (Multi-Layer Perceptron) | 0.62 | 0.62 | 0.60 | 0.66 | 0.63 | 0.38 |
| 6 | GaussianNB (Gaussian Naive Bayes) | 0.57 | 0.56 | 0.56 | 0.47 | 0.52 | 0.43 |
| 7 | DT (Decision Tree) | 0.56 | 0.56 | 0.54 | 0.63 | 0.58 | 0.44 |
| 8 | LinearSVC (Linear Support Vector Classification) | 0.49 | 0.50 | 0.49 | 1.00 | 0.65 | 0.51 |
| Category | All Records | Hit a Parked Vehicle |
|---|---|---|
| No Injury | 43.0% | 25.8% |
| Injury | 56.4% | 73.8% |
| Fatality | 0.6% | 0.4% |
| Total number of collisions | 3,817,613 | 6399 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tofighi, M.; Asgary, A.; Tofighi, G.; Podloski, B.; Cronemberger, F.; Mukherjee, A.; Liu, X. Applying Machine Learning Models to First Responder Collisions Beside Roads: Insights from “Two Vehicles Hit a Parked Motor Vehicle” Data. Appl. Sci. 2021, 11, 11198. https://doi.org/10.3390/app112311198
Tofighi M, Asgary A, Tofighi G, Podloski B, Cronemberger F, Mukherjee A, Liu X. Applying Machine Learning Models to First Responder Collisions Beside Roads: Insights from “Two Vehicles Hit a Parked Motor Vehicle” Data. Applied Sciences. 2021; 11(23):11198. https://doi.org/10.3390/app112311198
Chicago/Turabian StyleTofighi, Mohammadali, Ali Asgary, Ghassem Tofighi, Brady Podloski, Felippe Cronemberger, Abir Mukherjee, and Xia Liu. 2021. "Applying Machine Learning Models to First Responder Collisions Beside Roads: Insights from “Two Vehicles Hit a Parked Motor Vehicle” Data" Applied Sciences 11, no. 23: 11198. https://doi.org/10.3390/app112311198
APA StyleTofighi, M., Asgary, A., Tofighi, G., Podloski, B., Cronemberger, F., Mukherjee, A., & Liu, X. (2021). Applying Machine Learning Models to First Responder Collisions Beside Roads: Insights from “Two Vehicles Hit a Parked Motor Vehicle” Data. Applied Sciences, 11(23), 11198. https://doi.org/10.3390/app112311198