
Design Study of Multi-Rotor and Multi-Generator Wind Turbine with Lattice Tower—A Mechatronic Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
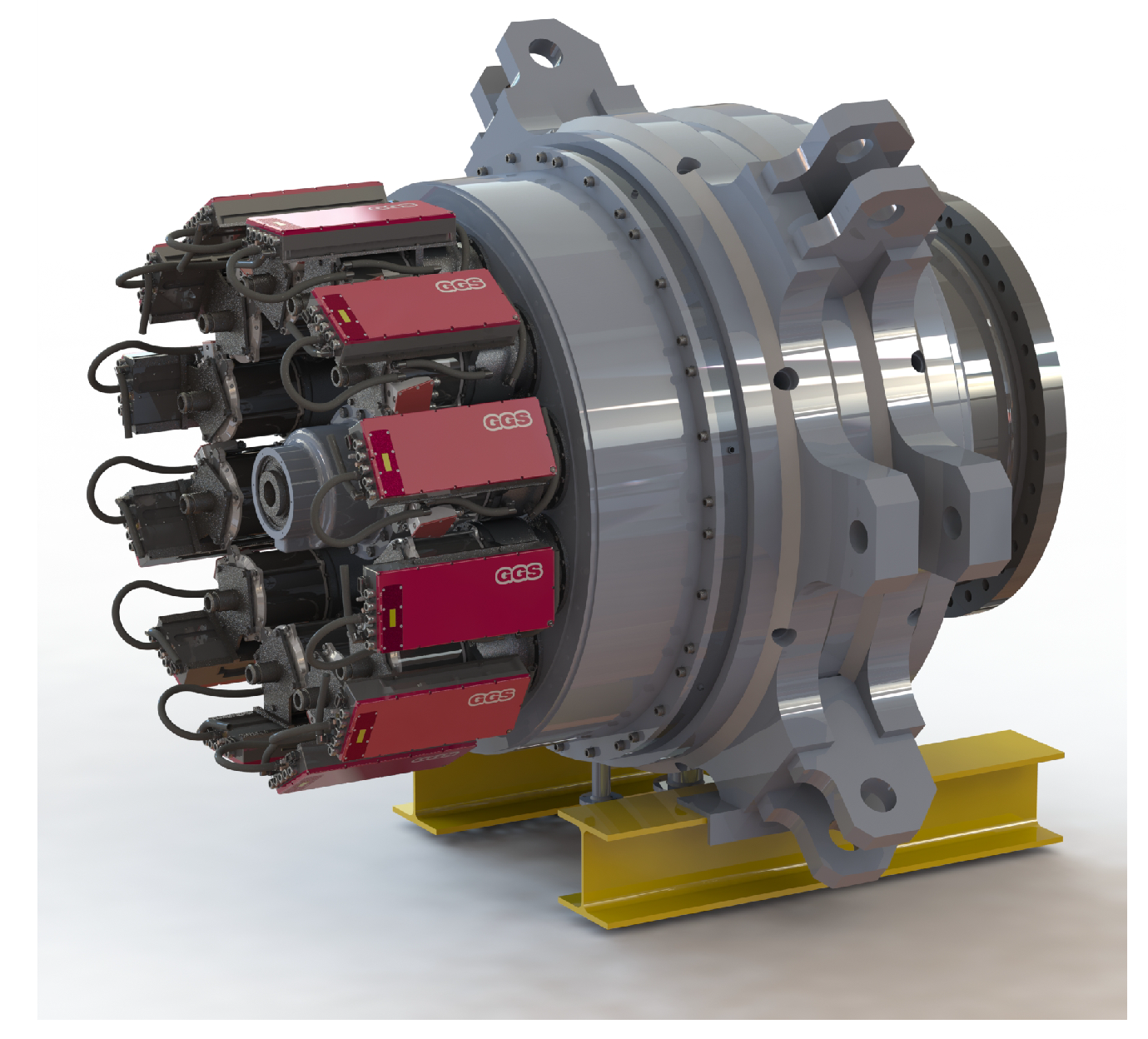
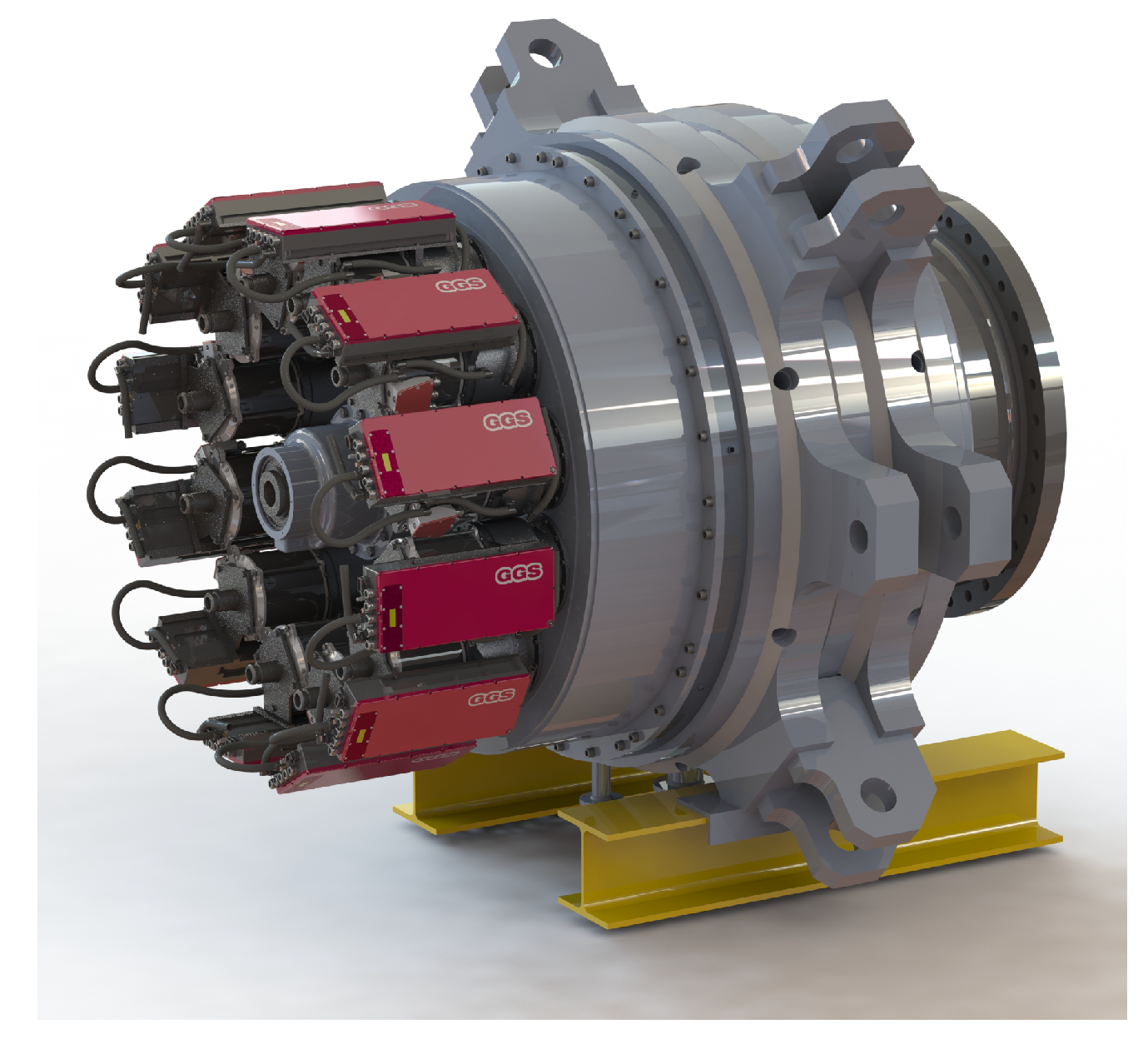
- Standardization of the multi-generator drive train: Components such as the single high-speed generators of the multi-generator drive-train in the power range of car/truck drive motors (200–220 kW) will allow for stable serial production at a size comfortably within industry experience. It will lead to very substantial cost reductions and improvements in reliability.
- Fault tolerance/Resilience: Faults on an individual rotor, generators, or power electronics do not affect the operation of the entire plant. The wind turbine system can continue to produce power in the occurrence of individual faults. In [8], a fault-tolerant control concept for the multirotor system was presented for achieving this.
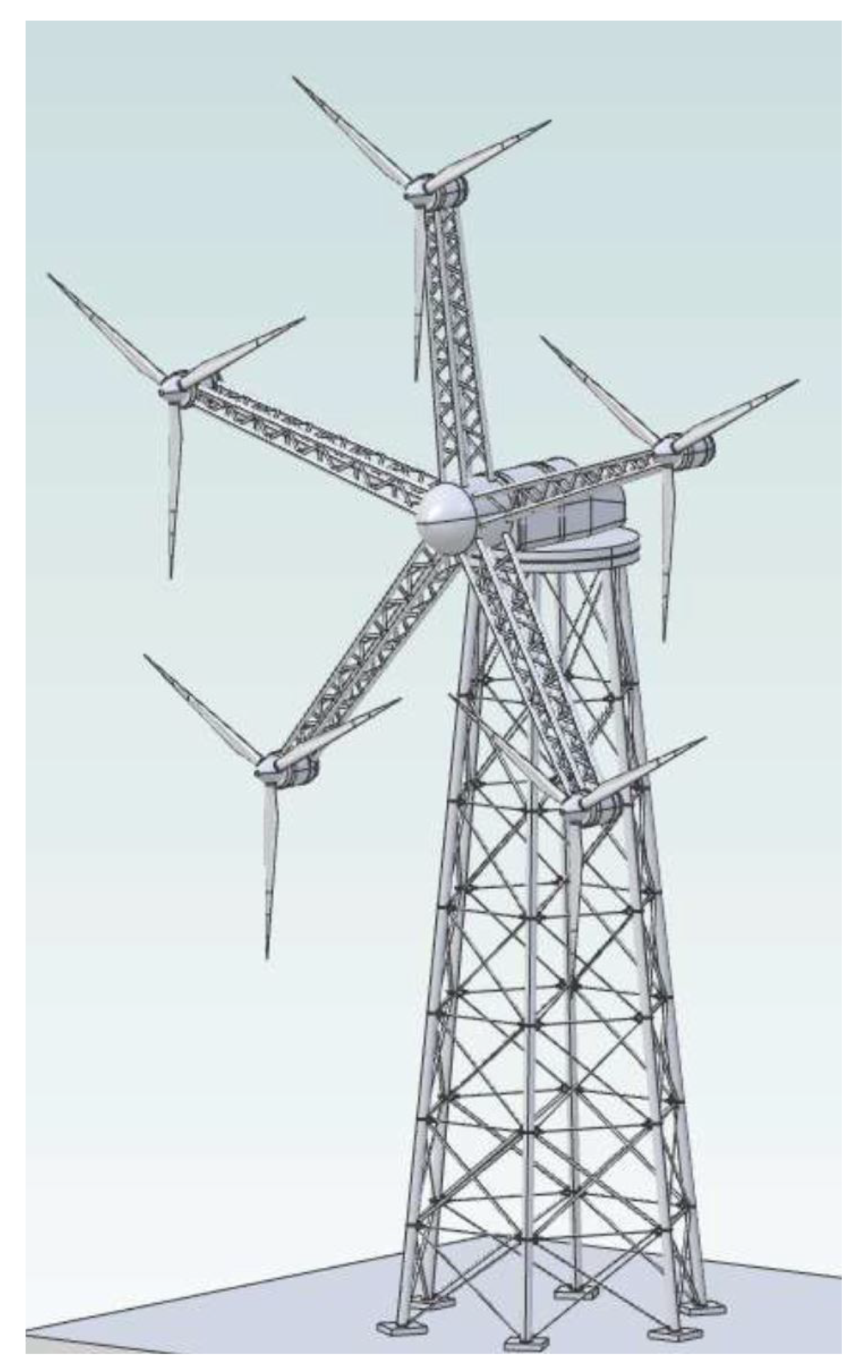
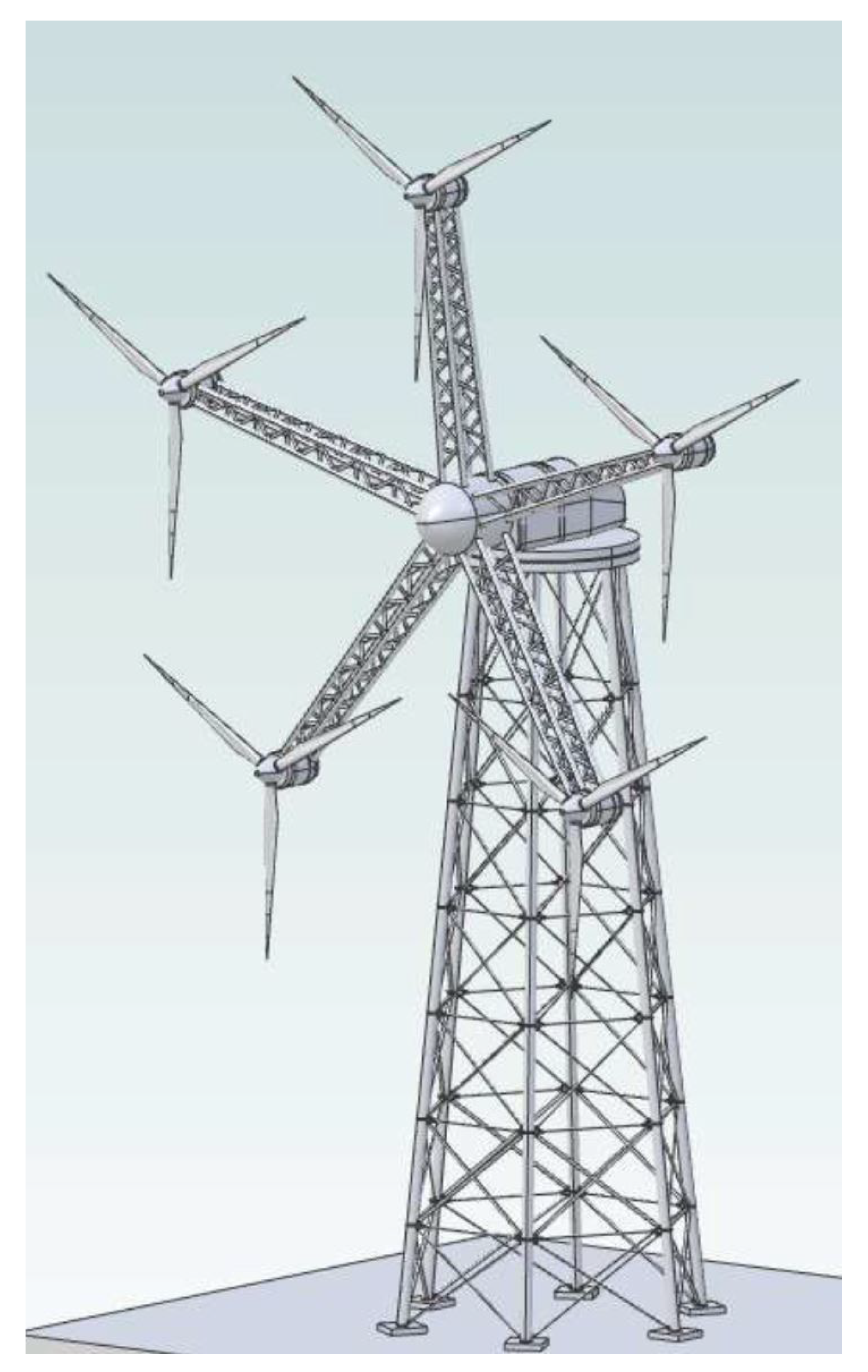
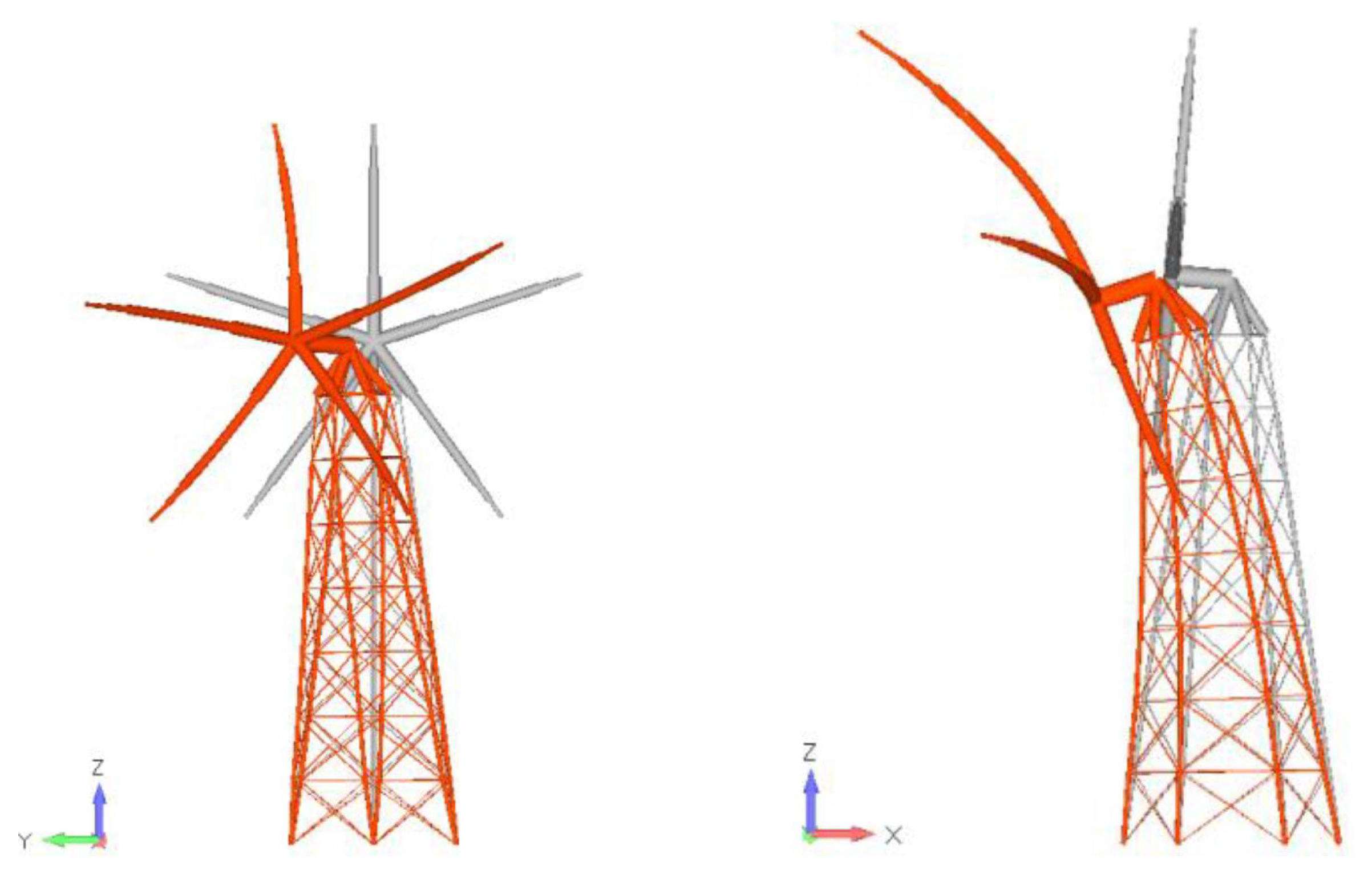
- Maintenance: The simplified maintainability results from the ability to disassemble the components of the drive train and the option to use an on-board crane and on-board elevator. The star of the five rotors could be turned so that the nacelle to be maintained remains on the six o’clock position (see Figure 1).
2. Plant Description and Control Objectives
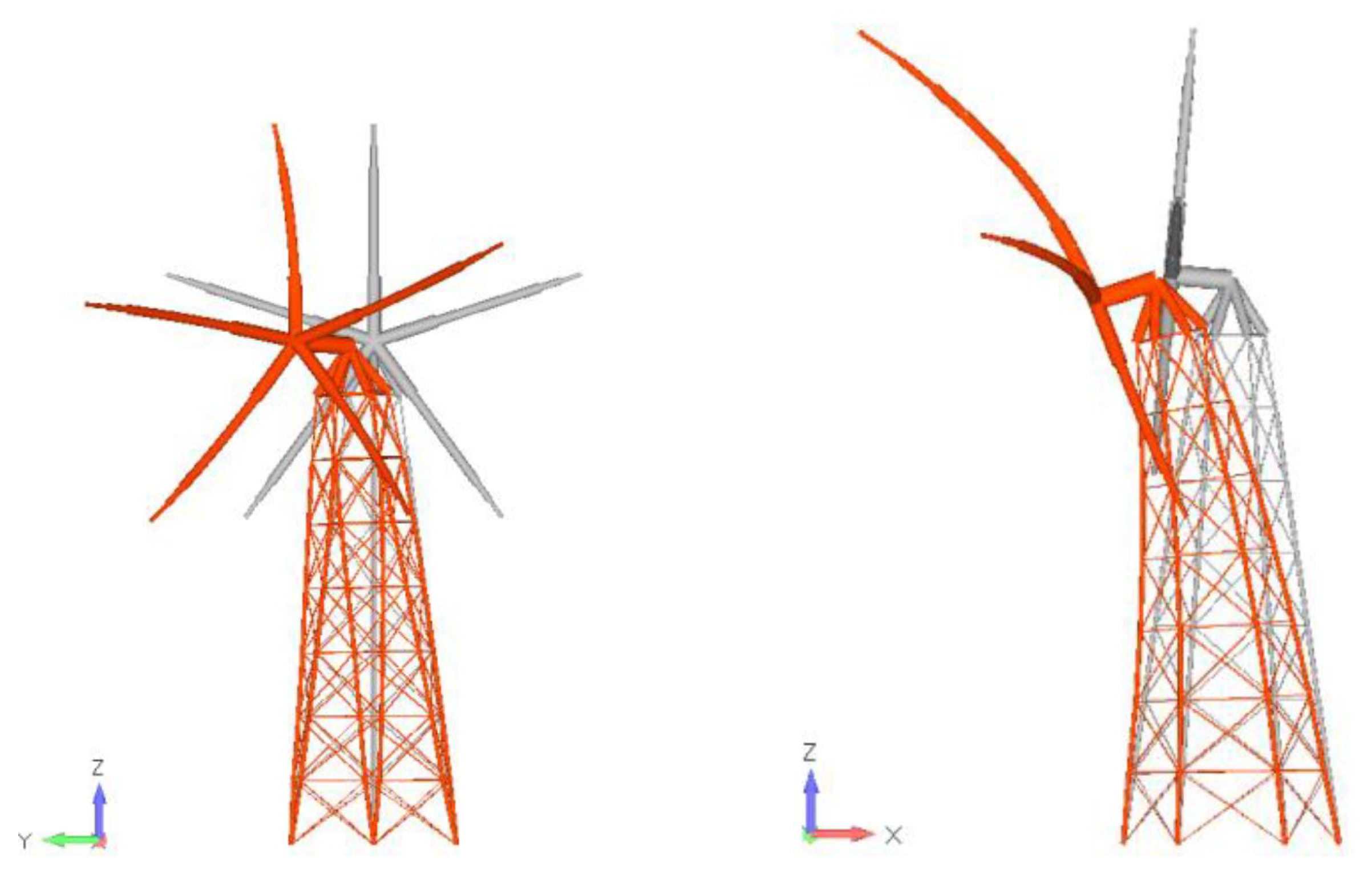
2.1. Structure of Lattice Main Tower and Support Arms
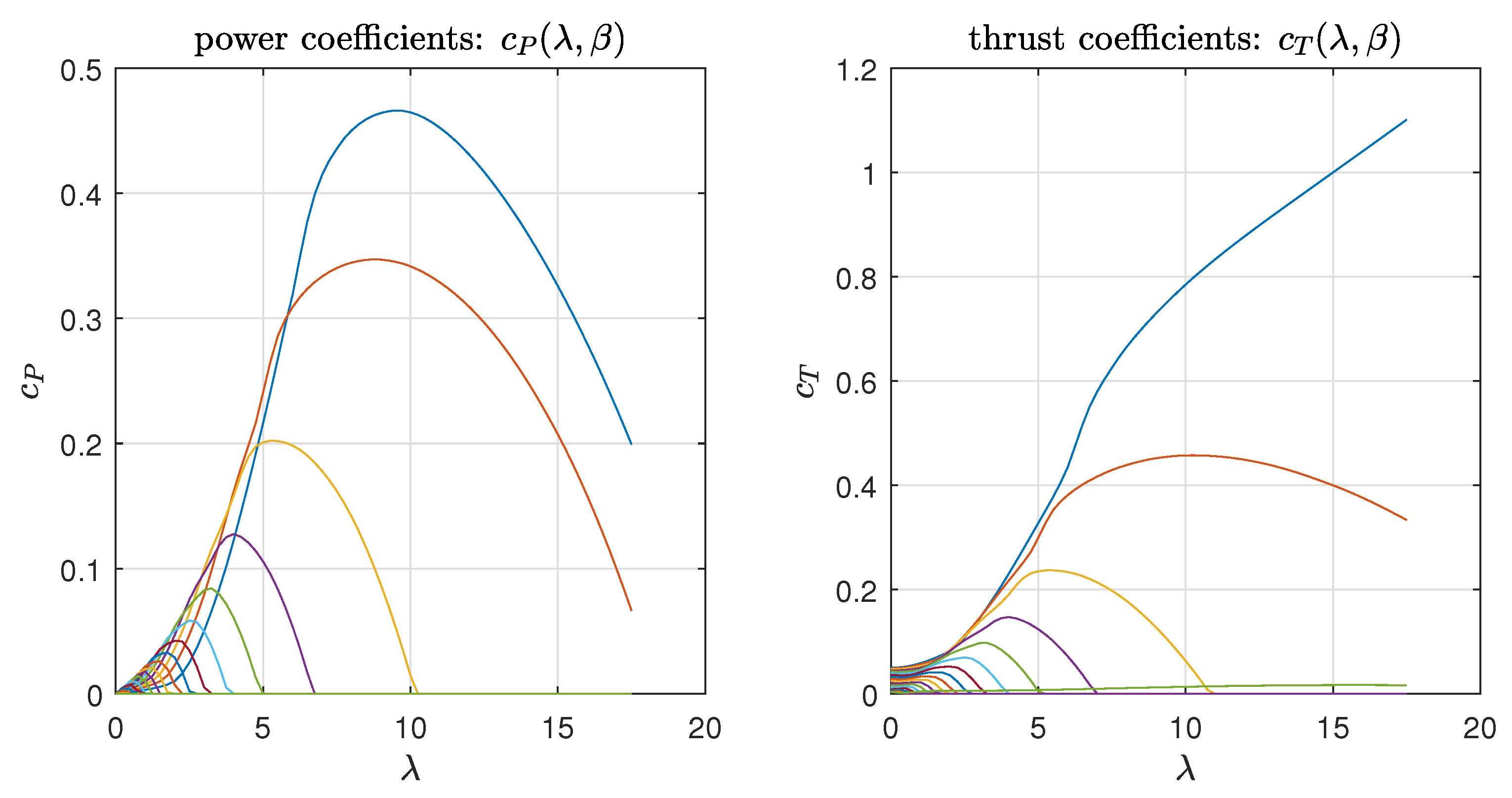
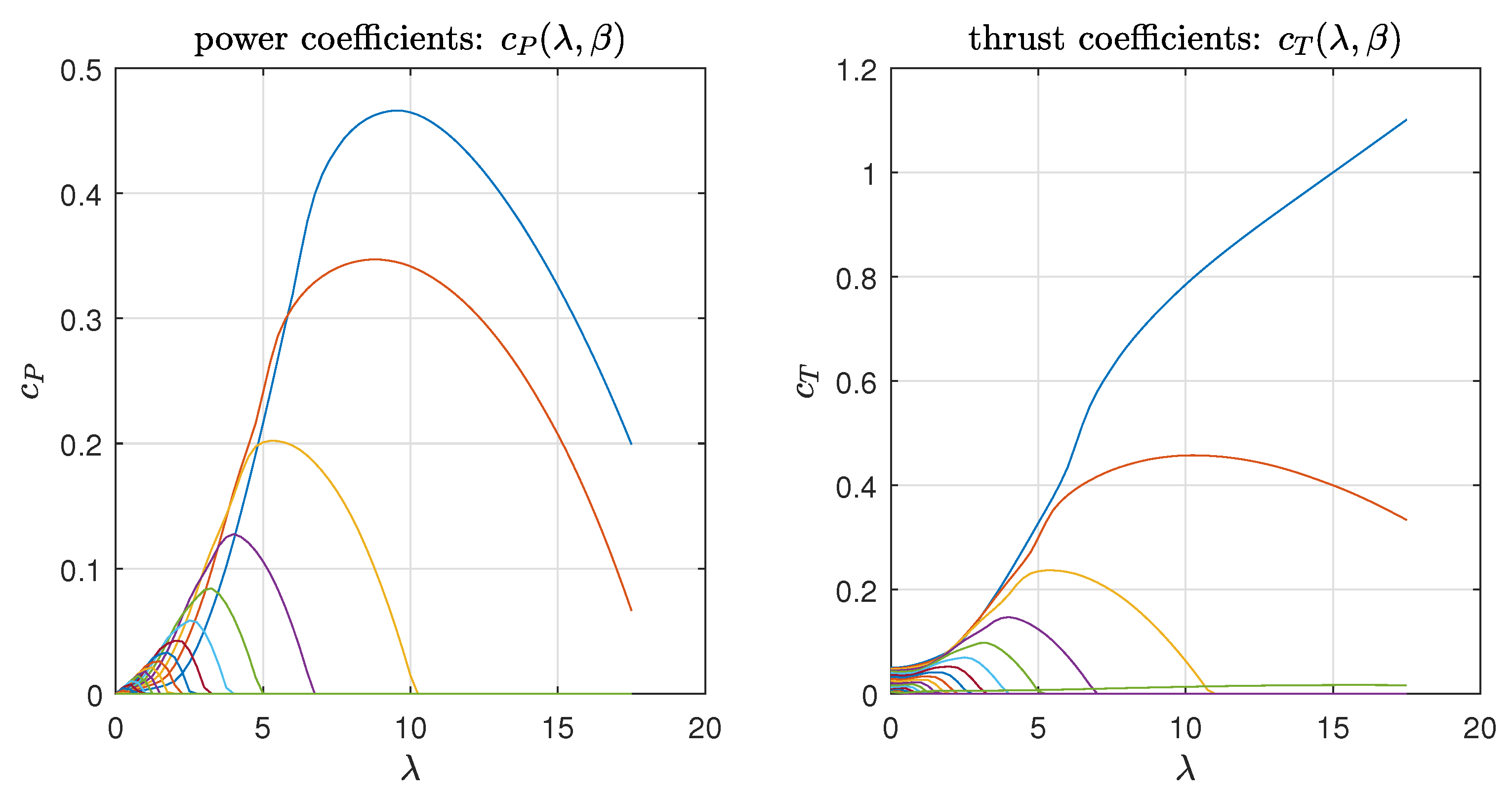
2.2. Aerodynamics of Single Wind Turbine Rotor
- Airfoil losses at the rotor blade sections due to drag forces;
- Tip losses due to flow around the blade tip;
- Wake vortex losses due to the downward wake vortex rotation.
2.3. Multi-Generator Drive Train
2.4. Control Objectives
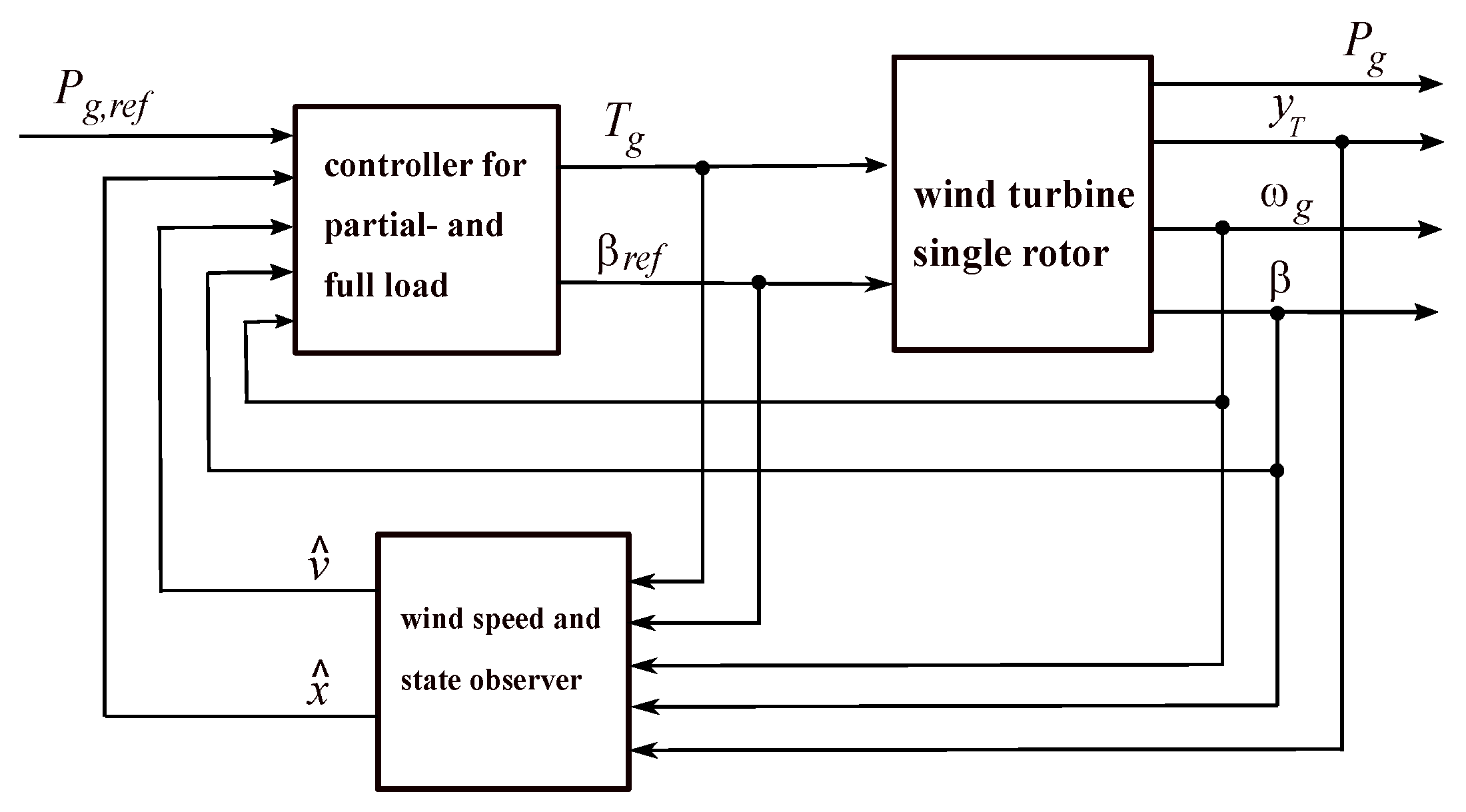
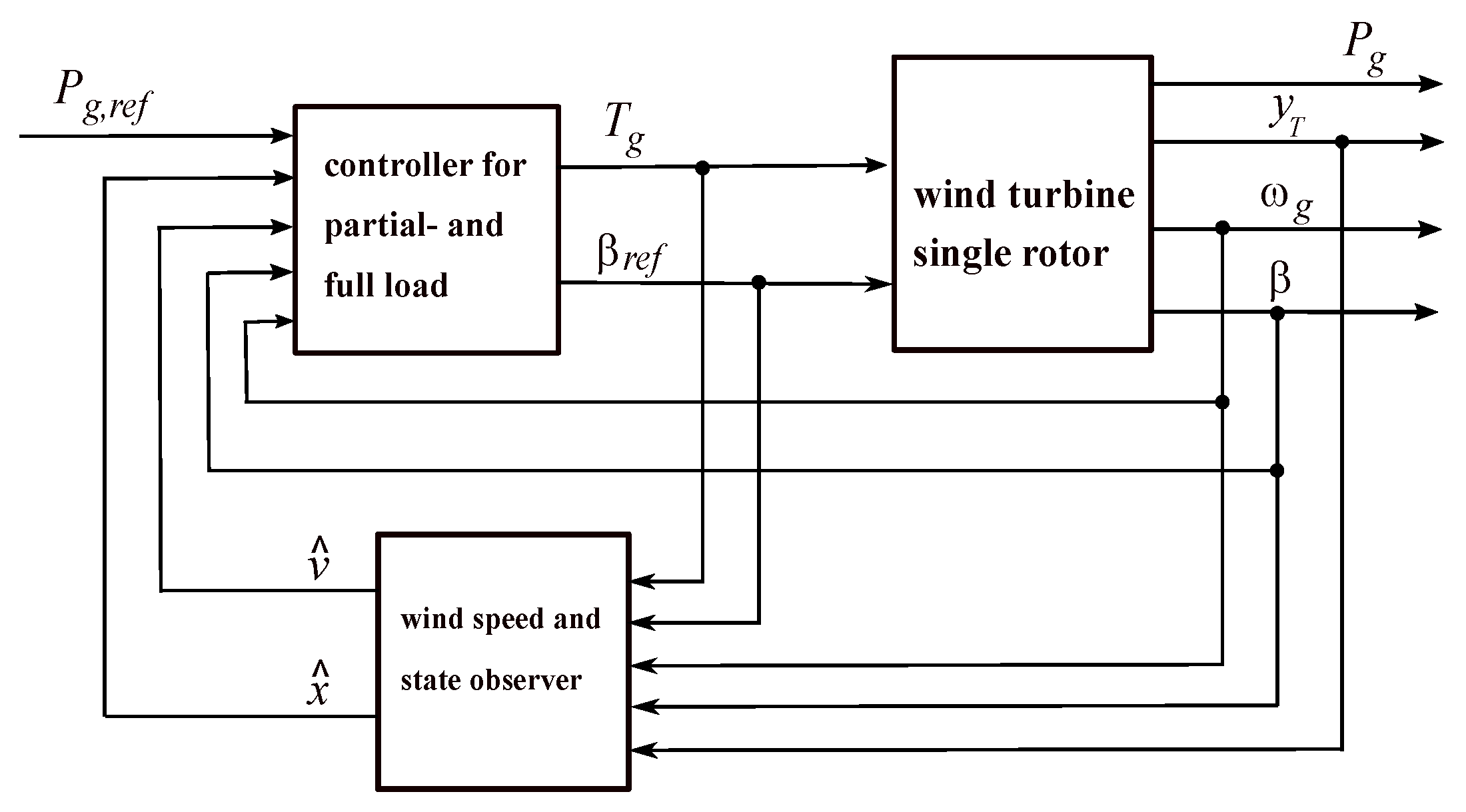
2.5. Control Scheme for Power Control and Load Mitigation
3. Methods
3.1. Reduced Dynamic Model for Observer and Controller Design
3.2. Effective Wind Speed and State Observer
4. Results
4.1. Control Laws for Partial-Load and Full-Load Operating Region
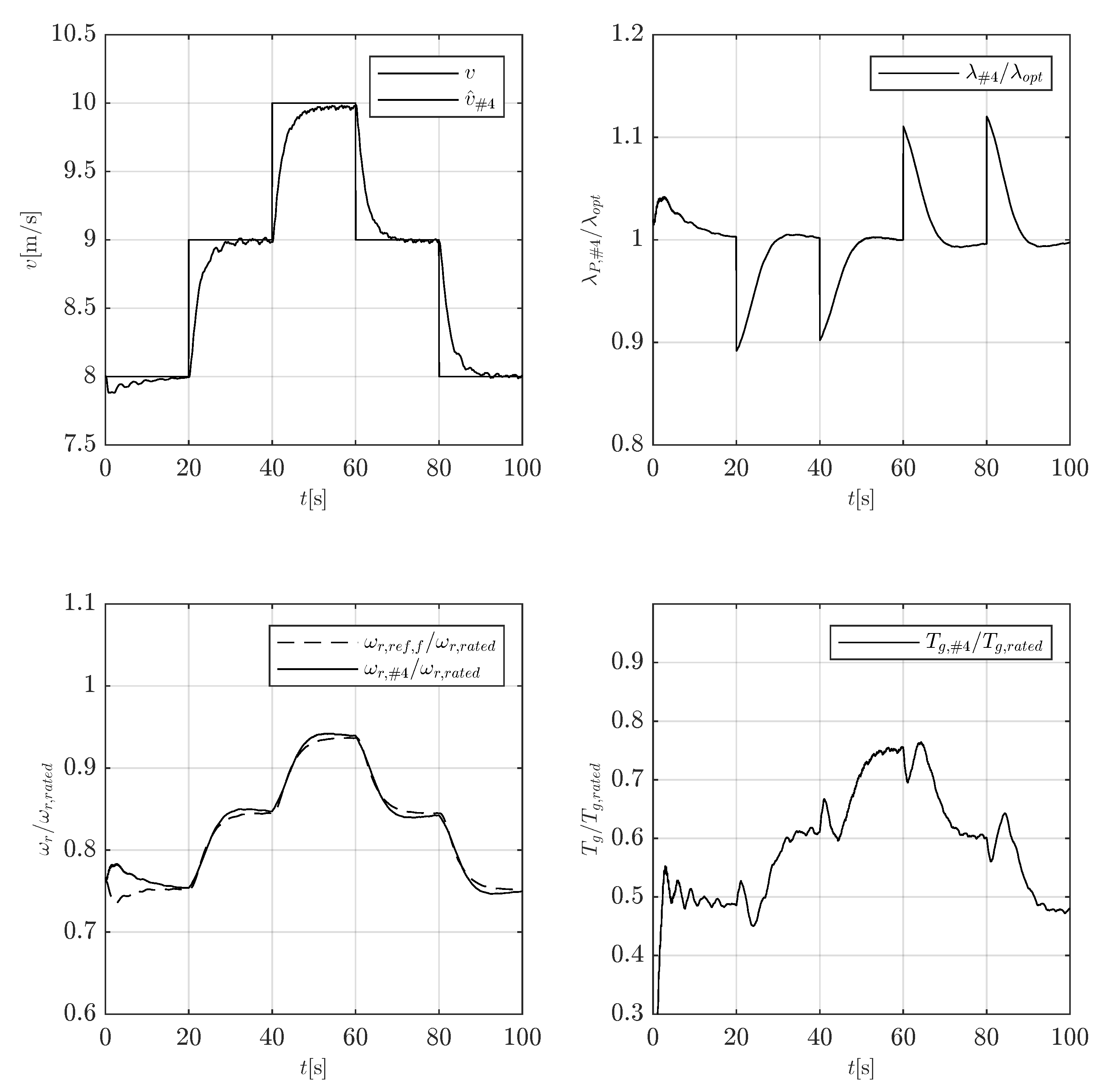
- The partial-load controller adjusts the generator torque to track the rotor speed following with , cf. Equation (3) where the pitch angle is set constantly to zero . According to Equation (2), this results directly from the control objective of maximizing the rotor power by tracking the rotor speed so that an optimum value is reached. Here, the dynamics is limited by the achievable actuating variable effort (generator torque).
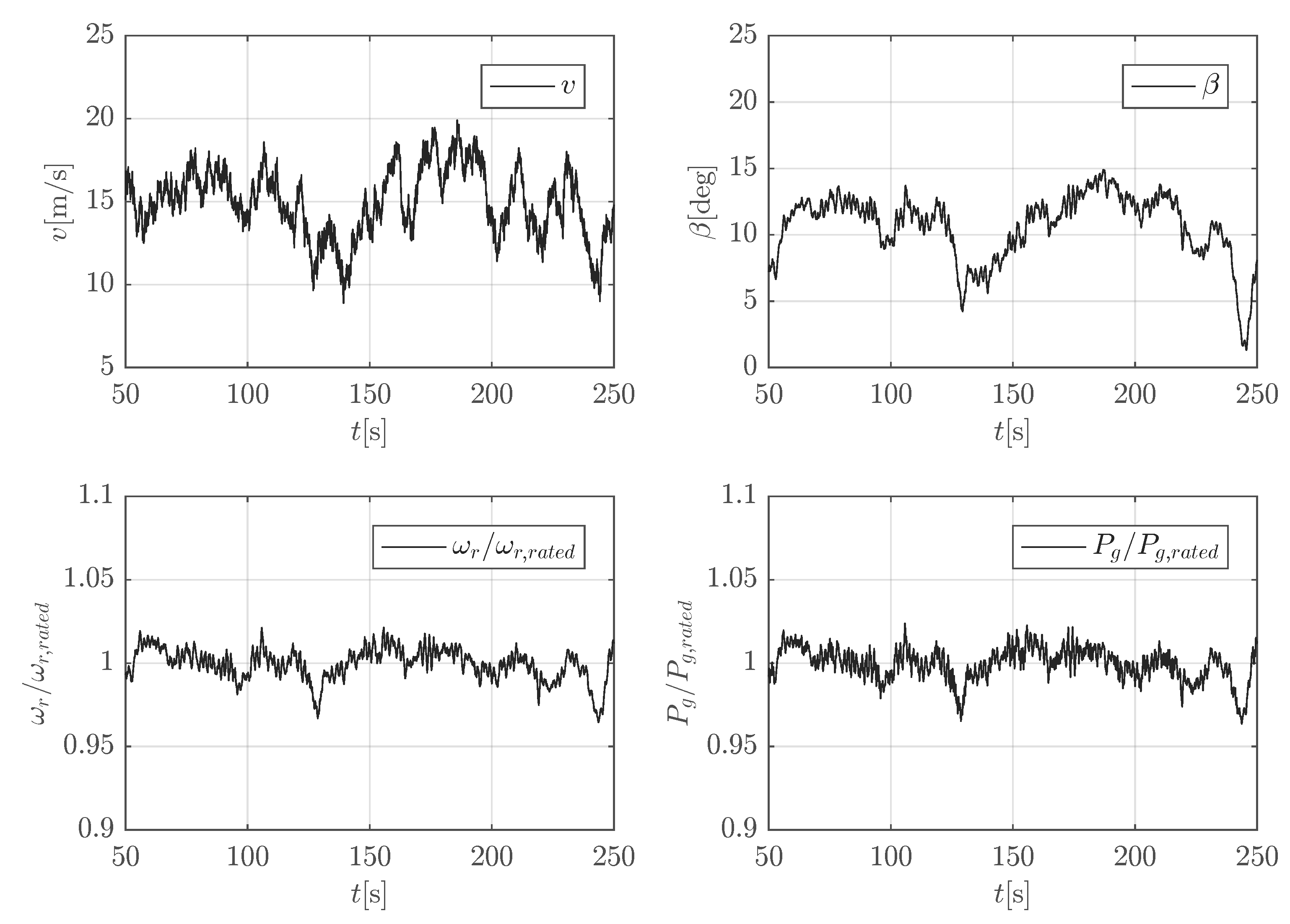
- On the other hand, the controller of the full-load region adjusts the pitch angle set point so that the rotor speed is kept to its rated value, i.e., . To obtain rated power if , the generator torque is simultaneously kept to its rated value .
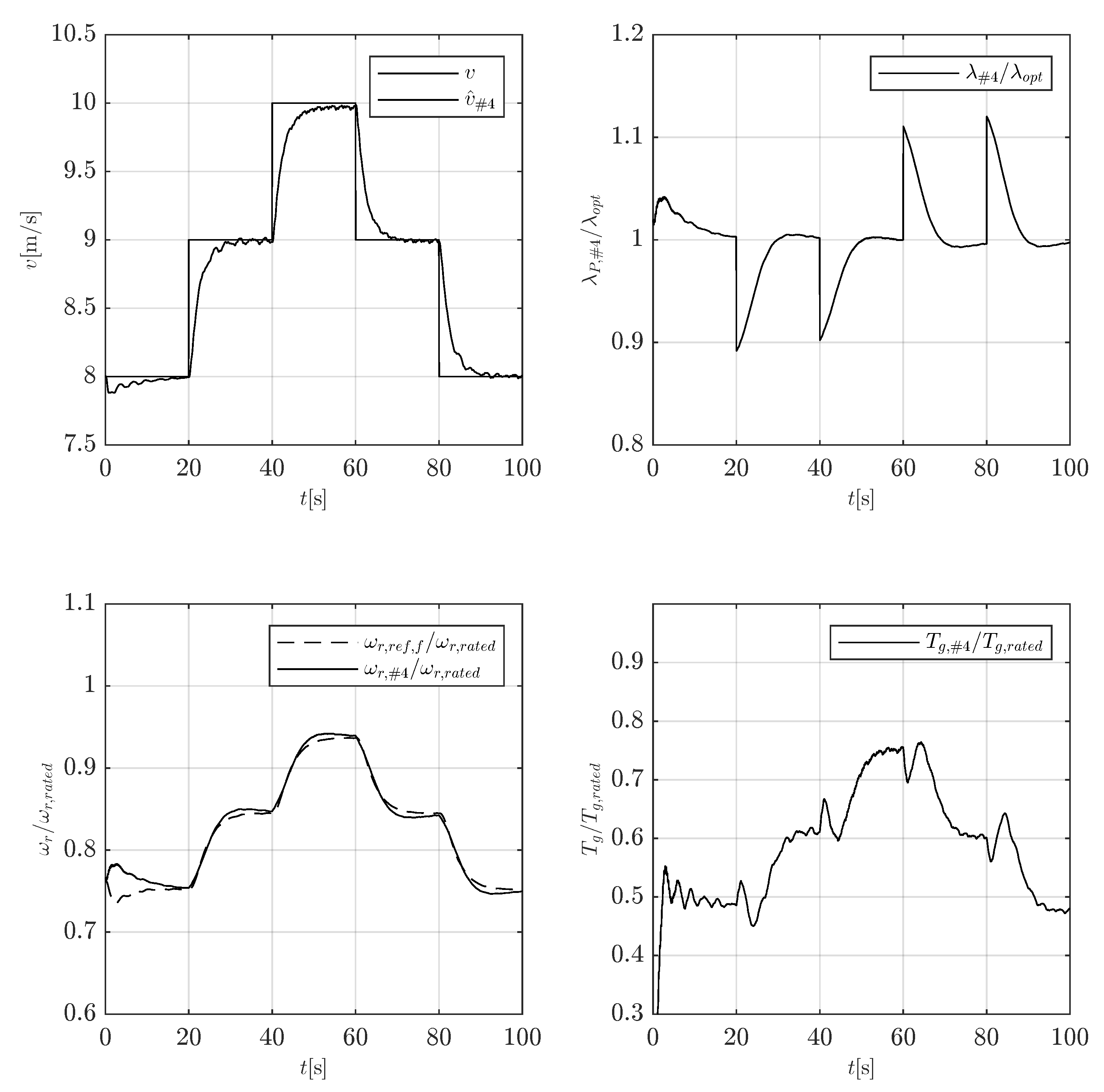
4.2. Simulation Results in the Partial-Load Region
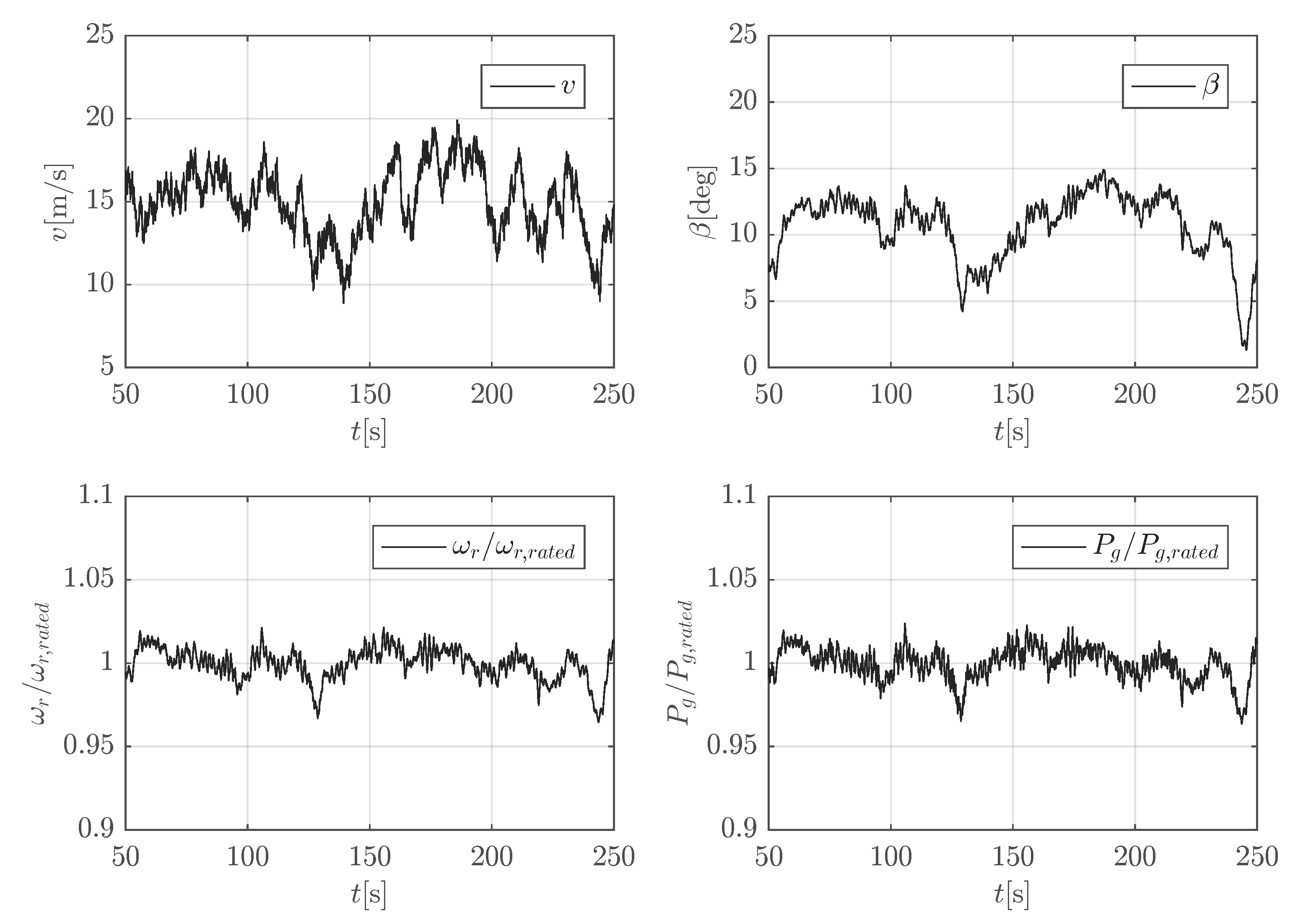
4.3. Simulation Results in the Full-Load Region
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| LMI | Linear Matrix Inequality |
| PDC | Parallel Distributed Compensation |
| TS | Takagi–Sugeno |
| WT | Wind turbine |
References
- Weber, T. Zehn-Megawatt-Prototypen für die Weltmeere; Erneuerbare Energien: Stuttgart, Germany, 2021. [Google Scholar]
- Barber, S.; Boller, S.; Nordborg, H. Feasibility study for 100% renewable energy microgrids in Switzerland. Wind Energy Sci. 2019, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Jamieson, P.; Branney, M. Multi-Rotors; A Solution to 20 MW and Beyond? Energy Procedia 2012, 24, 52–59. [Google Scholar] [CrossRef] [Green Version]
- Jamieson, P.; Branney, M. Structural Considerations of a 20 MW Multi-Rotor Wind Energy System. IOP Conf. Ser. J. Phys. 2014, 555, 012013. [Google Scholar] [CrossRef]
- Kale, S.A.; Sapali, S.N. A Review of Multi-Rotor Wind Turbine Systems. J. Sustain. Manuf. Renew. Energy 2013, 2, 60–68. [Google Scholar]
- Jamieson, P. Innovation in Wind Turbine Design, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Sandhu, N.S.; Chanana, S. Performance and Economic Analysis of Multi-Rotor Wind Turbine. Int. J. Eng. Technol. 2018, 6, 289–316. [Google Scholar] [CrossRef]
- Giger, U.; Kühne, P.; Schulte, H. Fault Tolerant and Optimal Control of Wind Turbines with Distributed High-Speed Generators. Energies 2017, 10, 149. [Google Scholar] [CrossRef]
- Tah, A.M.; Alsilevanai, K.M.; Özakca, M. Comparison of Various Bracing System for Self-Supporting Steel Lattice Structure Towers. Nonlinear model predictive control of wind turbines using LIDAR. Am. J. Civ. Eng. 2017, 5, 60–68. [Google Scholar] [CrossRef] [Green Version]
- Gauterin, E.; Kammerer, P.; Kühn, M.; Schulte, H. Effective wind speed estimation: Comparison between Kalman Filter and Takagi–Sugeno observer. ISA Trans. 2016, 62, 60–72. [Google Scholar] [CrossRef]
- Pöschke, F.; Gauterin, E.; Kühn, M.; Fortmann, J.; Schulte, H. Load mitigation and power tracking capability for wind turbines using linear matrix inequality-based control design. Wind Energy 2020, 23, 1792–1809. [Google Scholar] [CrossRef]
- Pirrie, P.; Campos-Gaona, D.; Ana, O. Comparison of electrical collection topologies for multi-rotor wind turbines. Wind Energy Sci. 2020, Preprint. [Google Scholar] [CrossRef]
- Givaki, K. Different options for multi-rotor wind turbine grid connection. In Proceedings of the 9th International Conference on Power Electronics, Machines and Drives (PEMD 2018), Liverpool, UK, 17–19 April 2018. [Google Scholar]
- Ghaisas, N.S.; Ghate, A.S.; Lele, S.K. Large-eddy simulation study of multi-rotor wind turbines. J. Phys. Conf. Ser. 2018, 1037, 7. [Google Scholar] [CrossRef]
- Betz, A. Das Maximum der theoretisch möglichen Ausnützung des Windes durch Windmotoren. Zeitschrift Gesamte Turbinenwesen 1920, 26, 307–309. [Google Scholar]
- Lendek, Z.; Guerra, T.M.; Babuska, R.; Schutter, B.D. Stability Analysis and Nonlinear Observer Design Using Takagi-Sugeno Fuzzy Models; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Georg, S.; Müller, M.; Schulte, H. Wind Turbine Model and Observer in Takagi-Sugeno Model Structure. In Proceedings of the EAWE Conference ’The Science of Making Torque from Wind’, European Academy of Wind Energy, Oldenburg, Germany, 9–11 October 2012. [Google Scholar]
- Ekelund, T. Modeling and Linear Quadratic Optimal Control of Wind Turbines. Ph.D. Thesis, Chalmers University of Technology, Göteborg, Sweden, 1997. [Google Scholar]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; Technical Report; NREL/TP-500-38060; National Renewable Energy Laboratory: Golden, CO, USA, 2009.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giger, U.; Kleinhansl, S.; Schulte, H. Design Study of Multi-Rotor and Multi-Generator Wind Turbine with Lattice Tower—A Mechatronic Approach. Appl. Sci. 2021, 11, 11043. https://doi.org/10.3390/app112211043
Giger U, Kleinhansl S, Schulte H. Design Study of Multi-Rotor and Multi-Generator Wind Turbine with Lattice Tower—A Mechatronic Approach. Applied Sciences. 2021; 11(22):11043. https://doi.org/10.3390/app112211043
Chicago/Turabian StyleGiger, Urs, Stefan Kleinhansl, and Horst Schulte. 2021. "Design Study of Multi-Rotor and Multi-Generator Wind Turbine with Lattice Tower—A Mechatronic Approach" Applied Sciences 11, no. 22: 11043. https://doi.org/10.3390/app112211043
APA StyleGiger, U., Kleinhansl, S., & Schulte, H. (2021). Design Study of Multi-Rotor and Multi-Generator Wind Turbine with Lattice Tower—A Mechatronic Approach. Applied Sciences, 11(22), 11043. https://doi.org/10.3390/app112211043