
Identification of Close Modes on Frequency in Rotating Systems




Abstract
:1. Introduction
2. Close modes in Frequency
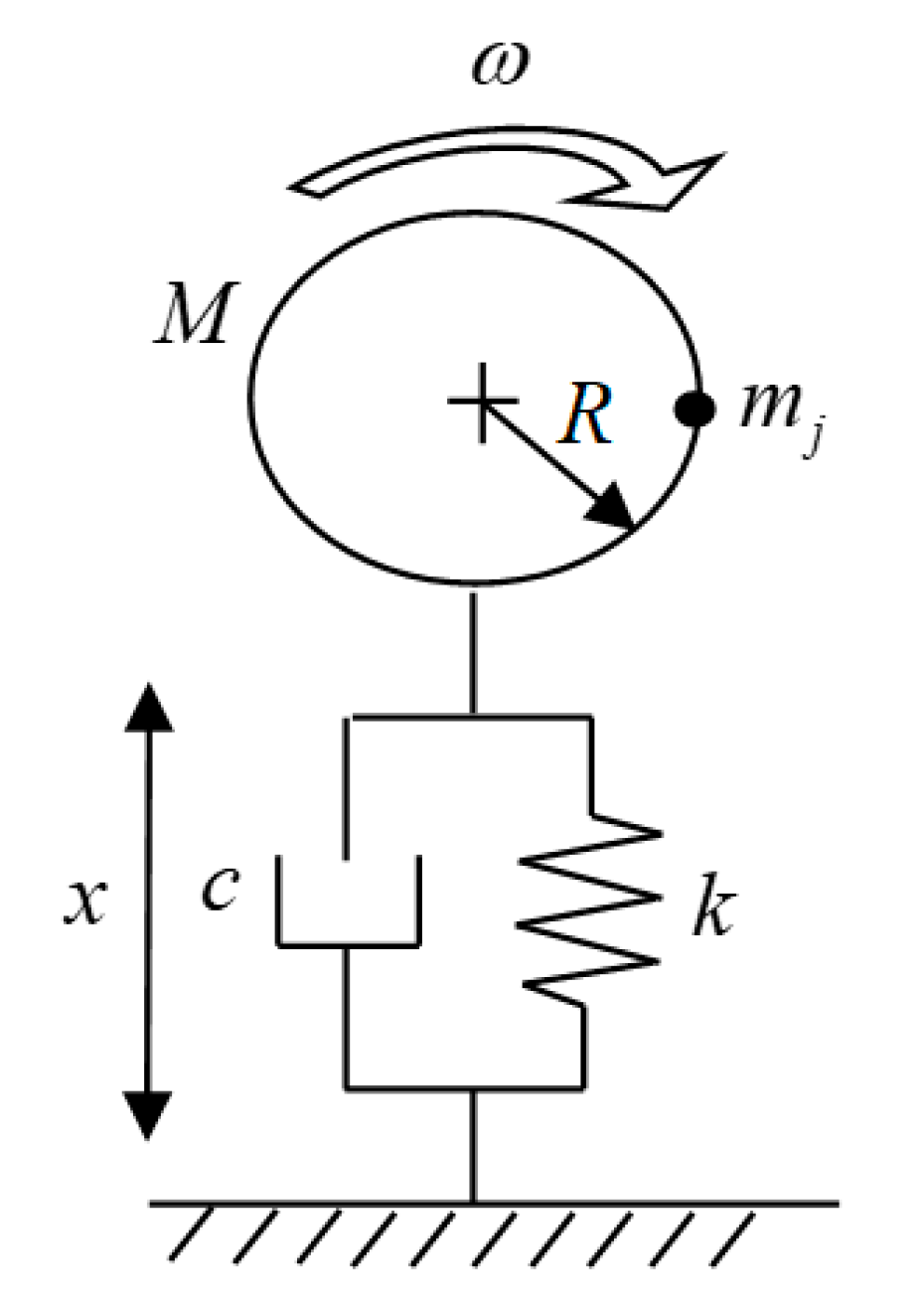
2.1. Mathemathical Model
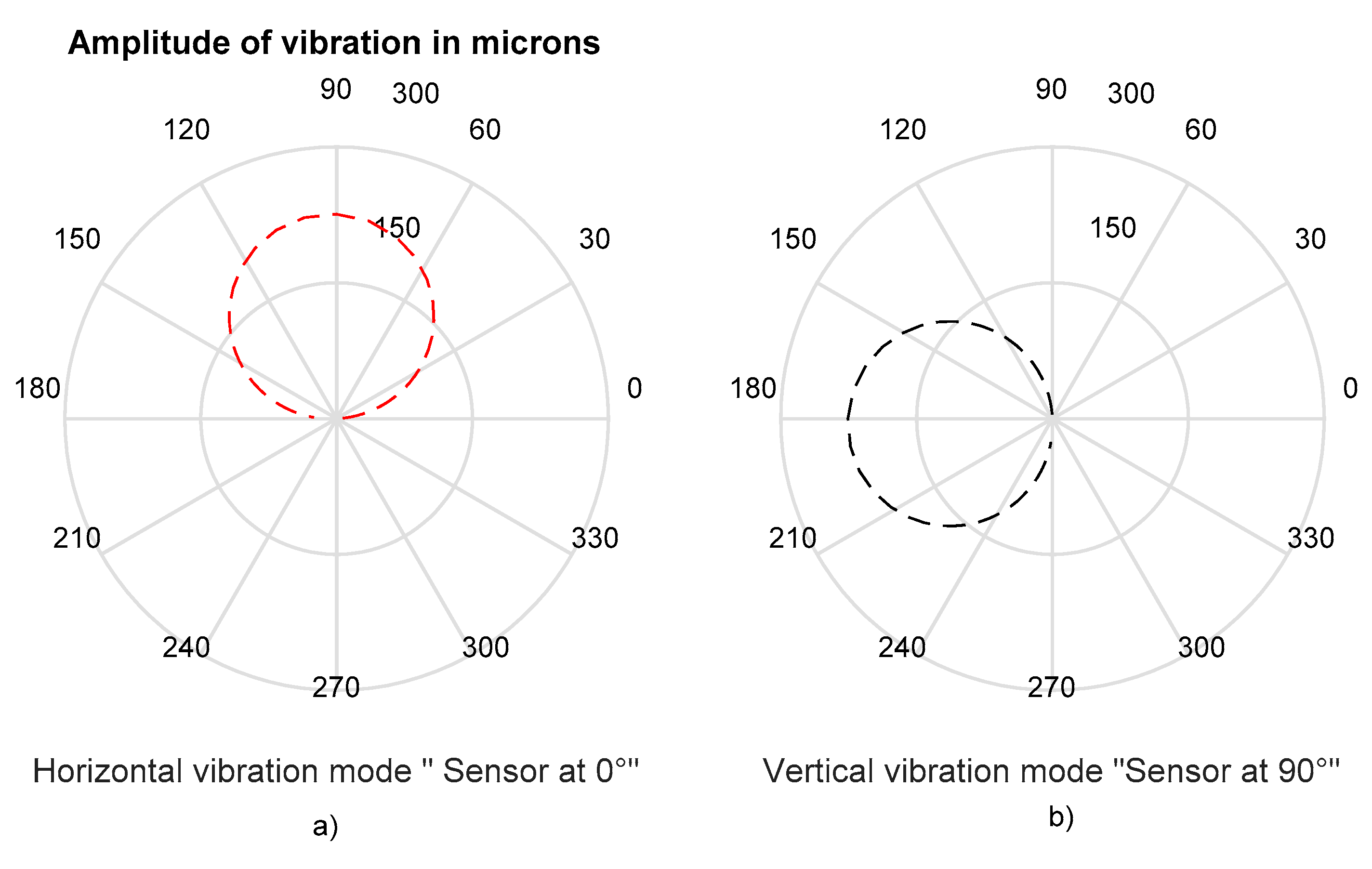
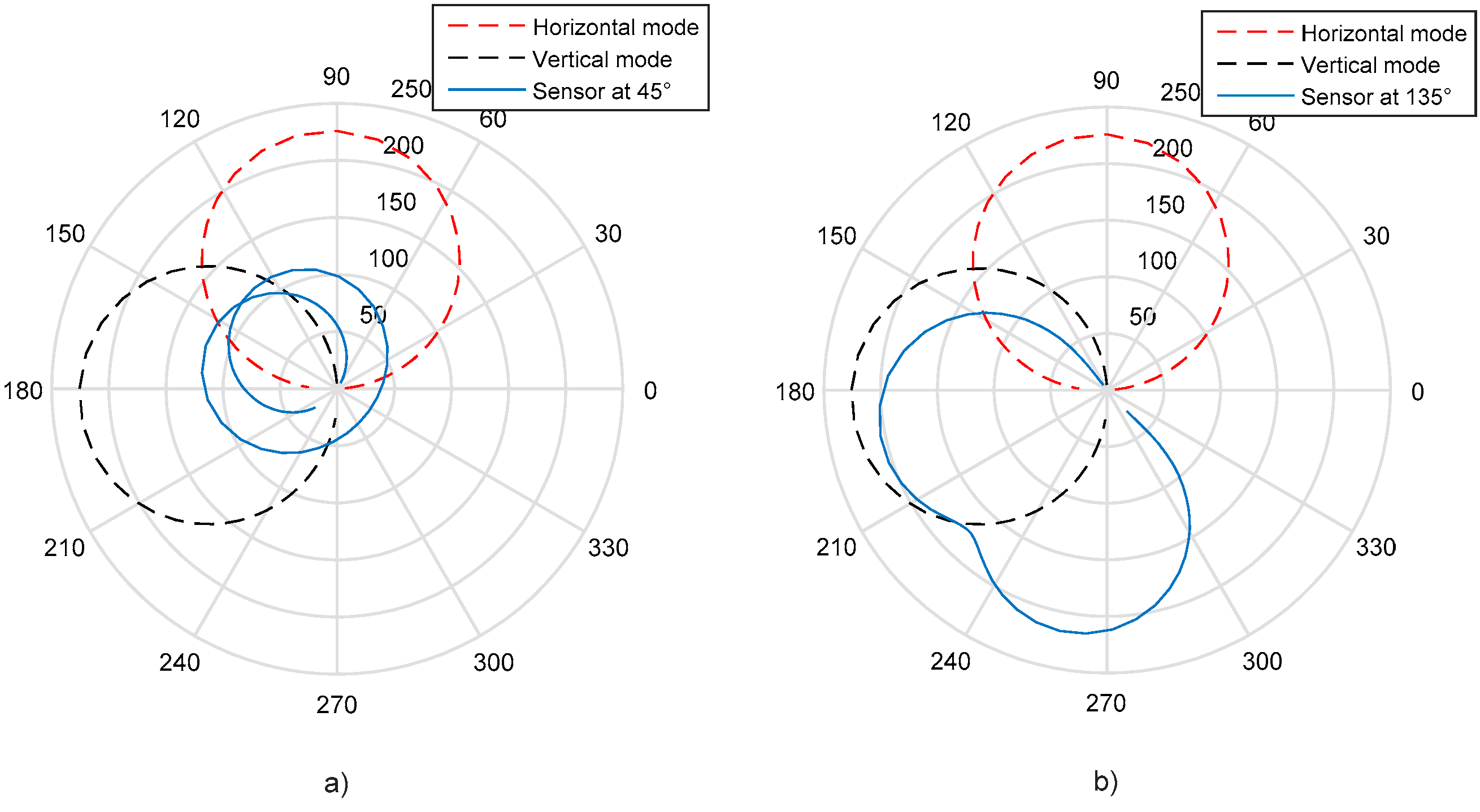
2.2. Signals Coupling Using Imaginary Sensor
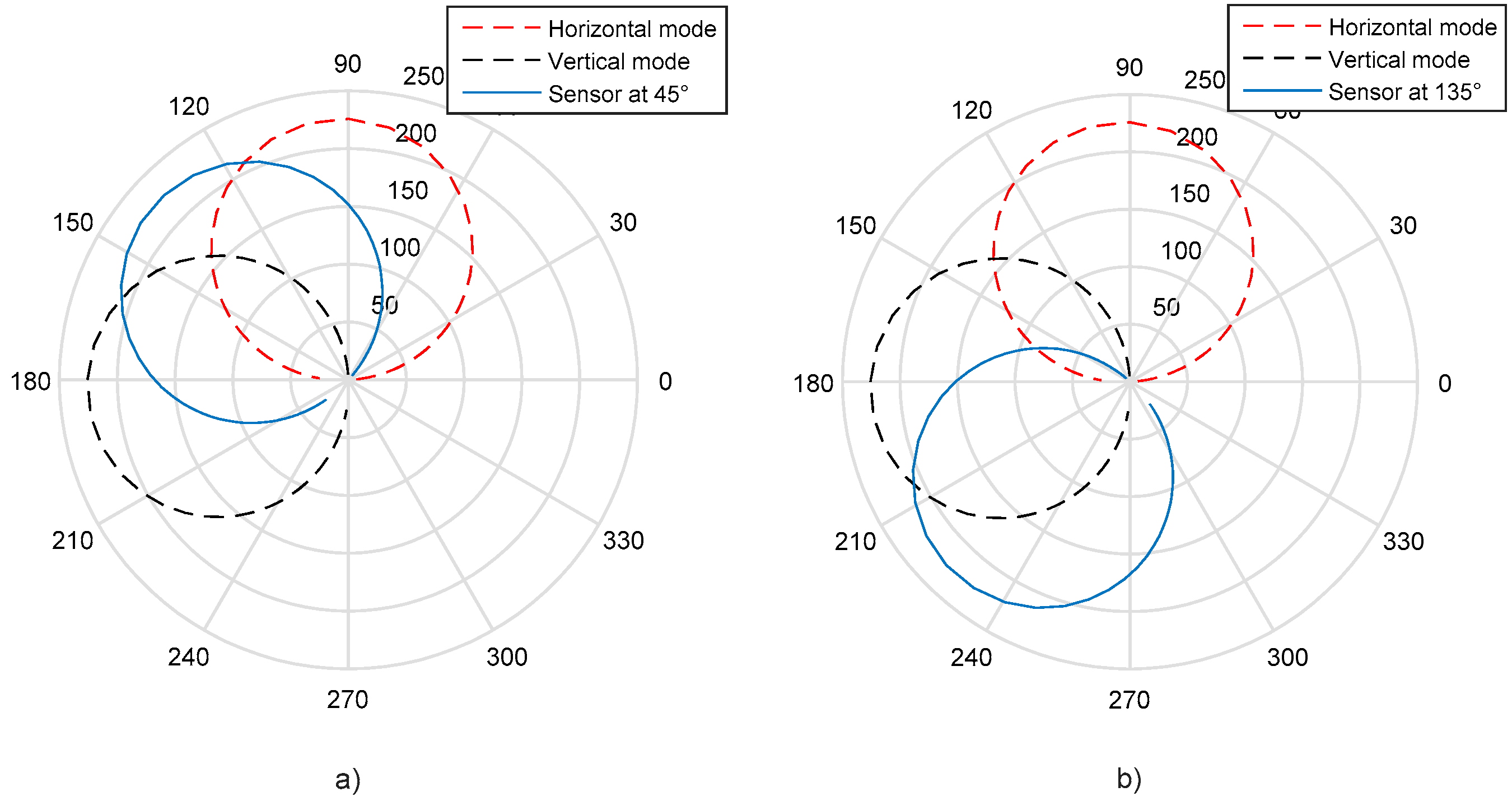
2.3. Identification of Close Modes in Frequency
3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Parkinson, A.G.; Jackson, K.L.; Bishop, R.E.D. Some Experiments on the Balancing of Small Flexible Rotors: Part II-Experiments. J. Mech. Eng. Sci. 1963, 5, 133–145. [Google Scholar] [CrossRef]
- Delgado, E.P.; Bannister, R.H. Balancing of an Experimental Rotor without Trial Runs. Int. J. Rotating Mach. 2002, 8, 99–108. [Google Scholar] [CrossRef] [Green Version]
- Figueroa Díaz, R.A. Técnicas para Extracción de los Parámetros Modales de la Respuesta de Dinámica de un Rotor Desbalan-ceado, Mediante el Giro de un Transductor Hipotético. Ph.D. Thesis, CENIDET Cuernavaca, Morelos, Mexico, 2012. [Google Scholar]
- Ewins, D.J. Modal Testing: Theory and Practice; Research Studies Press LTD, 2000; ISBN 0863802184. Available online: https://books.google.com.hk/books?hl=zh-CN&lr=&id=09_zDwAAQBAJ&oi=fnd&pg=PA1&dq=Modal+Testing:+Theory+and+Practice&ots=fu01qWR5Mr&sig=oGWN60WWAXXmBvTrG7qjThKlJfo&redir_esc=y&hl=zh-CN&sourceid=cndr#v=onepage&q&f=false (accessed on 4 October 2021).
- Sun, W.; Hou, L.; Sun, M. Close-mode identification based on wavelet scalogram reassignment. In Proceedings of the 24th Conference and Exposition on Structural Dynamics (IMAC-2006), St. Louis, MO, USA, 30 January–2 February 2006. [Google Scholar]
- Mottershead, J.E.; Mares, C.; James, S. Separation of close modes in axisymmetric structures. In Proceedings of the International Modal Analysis Conference: Proceedings of IMAC-XX, Los Angeles, CA, USA, 4–6 February 2002; pp. 1452–1457. [Google Scholar]
- Malekjafarian, A.; Brincker, R.; Ashory, M.; Khatibi, M. Identification of close spaced modes using Ibrahim Time Domain method. In Proceedings of the International Operational Modal Analysis Conference IOMAC’11, Istanbul, Turkey, 9–11 May 2011; pp. 120–126. [Google Scholar]
- Feng, X.; Zhou, J. Identification of Modal Parameters for Close-Mode Structures with Output-Only Data. Earth Space 2006, 1–8. [Google Scholar] [CrossRef]
- Liu, X.; Hu, J. Low order vibration control for structures with highly correlated close modes. Sci. China Ser. E Technol. Sci. 2011, 54, 1855–1864. [Google Scholar] [CrossRef]
- Brincker, R.; López-Aenlle, M. Mode shape sensitivity of two closely spaced eigenvalues. J. Sound Vib. 2015, 334, 377–387. [Google Scholar] [CrossRef]
- Kim, Y.S.; Chen, L.-Q. Separation of closely spaced modes by combining complex envelope displacement analysis with method of generating intrinsic mode functions through filtering algorithm based on wavelet packet decomposition. Appl. Math. Mech. 2013, 34, 801–810. [Google Scholar] [CrossRef]
- Au, S.-K.; Brownjohn, J. Asymptotic identification uncertainty of close modes in Bayesian operational modal analysis. Mech. Syst. Signal Process. 2019, 133. [Google Scholar] [CrossRef]
- Gutierrez, W.E.; Vélez, C.G.; Szwedowicz, W.D.; Bedolla, H.J.; Cortés, G.C. Identification of close vibration modes of a quasi-axisymmetric structure: Complementary study. Ing. Investig. Tecnol. 2013, 14, 207–222. [Google Scholar]
- Au, S.-K.; Brownjohn, J.M.; Li, B.; Raby, A. Understanding and managing identification uncertainty of close modes in operational modal analysis. Mech. Syst. Signal Process. 2021, 147, 107018. [Google Scholar] [CrossRef]
- Muszynska, A.; Bently, D.E. Measurement of rotor system dynamic stiffness by perturbation testing. In Proceedings of the Symposium on Instability in Rotating Machinery, Carson City, NV, USA, 10 June 1985; pp. 47–58. [Google Scholar]
- Alsaleh, A.; Ouakad, H. Analysis of lateral vibrations of an unbalanced Jeffcott rotor. In Proceedings of the 14th International Conference on Vibration Engineering and Technology of Machinery (VETOMAC XIV), Lisbon, Portugal, 10–13 September 2018. [Google Scholar]
- Díaz, R.A.F.; Sarellano, M.H.; Alcantar, P.C.; Verduzco, I.M. Dynamic response in non-perpendicular stiff main directional rotors using coordinate transformation. J. Braz. Soc. Mech. Sci. Eng. 2015, 37, 1615–1622. [Google Scholar] [CrossRef]
- Díaz, R.A.F.; Romano, J.E.A.; García, A.B.; Alcantar, P.C. Methodology to improve mode identification and modal parameter extraction for rotor dynamic analysis. J. Vibroeng. 2017, 19, 2806–2821. [Google Scholar] [CrossRef] [Green Version]
- Deng, W.; Tong, M.; Zheng, Q.; Ren, X.; Yang, Y. Investigation on transient dynamic balancing of the power turbine rotor and its application. Adv. Mech. Eng. 2021, 13, 16878140211007325. [Google Scholar] [CrossRef]
- Gunter, E.J.; Barrett, L.E.; Allaire, P.E. Balancing of Multimass Flexible Rotors; Texas A&M University, Gas Turbine Laboratories: College Station, TX, USA, 1976; Available online: https://hdl.handle.net/1969.1/163821 (accessed on 4 October 2021).
- Vance, J.M.; Murphy, B.; Tripp, H. Critical Speeds of Turbomachinery: Computer Predictions vs. Experimental Measurements; Texas A&M University, Turbomachinery Laboratories: College Station, TX, USA, 1984; Available online: https://hdl.handle.net/1969.1/163651 (accessed on 4 October 2021).
- Maxwell, A.S.; Sanderson, A.F.P. Site Balancing of a Large Flexible Rotor Containing Unbalance Eccentricity and Permanent Residual Bow; Texas A&M University, Gas Turbine Laboratories: College Station, TX, USA, 1976; Available online: https://hdl.handle.net/1969.1/163824 (accessed on 4 October 2021).
- Figueroa Díaz, R.A.; Aguirre Romano, J.E.; Cruz Alcantar, P.; Murillo Verduzco, I.; Sarellano, M.H. Application of coordinate transformation for detection of vibration modes: A comparative study in 2 turbogenerators. J. Vibroeng. 2015, 17, 2108–2120. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Quantity |
|---|---|
| Modal mass of the first mode () | 55,337.11 (kg) |
| Horizontal mode natural circular frequency () | 159.79 (rad/s) |
| Horizontal mode damping ratio () | 0.05 |
| Vertical mode natural circular frequency () | 129.85 (rad/s) |
| Vertical mode damping ratio () | 0.05 |
| Imbalance mass () | 2 to 0° (kg) |
| Imbalance mass placement radius | 0.45 (m) |
| Angular velocity | 0–188.49 (rad/s) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Figueroa-Díaz, R.A.; Cruz-Alcantar, P.; Balvantín-García, A.d.J. Identification of Close Modes on Frequency in Rotating Systems. Appl. Sci. 2021, 11, 9963. https://doi.org/10.3390/app11219963
Figueroa-Díaz RA, Cruz-Alcantar P, Balvantín-García AdJ. Identification of Close Modes on Frequency in Rotating Systems. Applied Sciences. 2021; 11(21):9963. https://doi.org/10.3390/app11219963
Chicago/Turabian StyleFigueroa-Díaz, Rafael A., Pedro Cruz-Alcantar, and Antonio de J. Balvantín-García. 2021. "Identification of Close Modes on Frequency in Rotating Systems" Applied Sciences 11, no. 21: 9963. https://doi.org/10.3390/app11219963
APA StyleFigueroa-Díaz, R. A., Cruz-Alcantar, P., & Balvantín-García, A. d. J. (2021). Identification of Close Modes on Frequency in Rotating Systems. Applied Sciences, 11(21), 9963. https://doi.org/10.3390/app11219963