
Analyzing the Stability for the Motion of an Unstretched Double Pendulum near Resonance




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
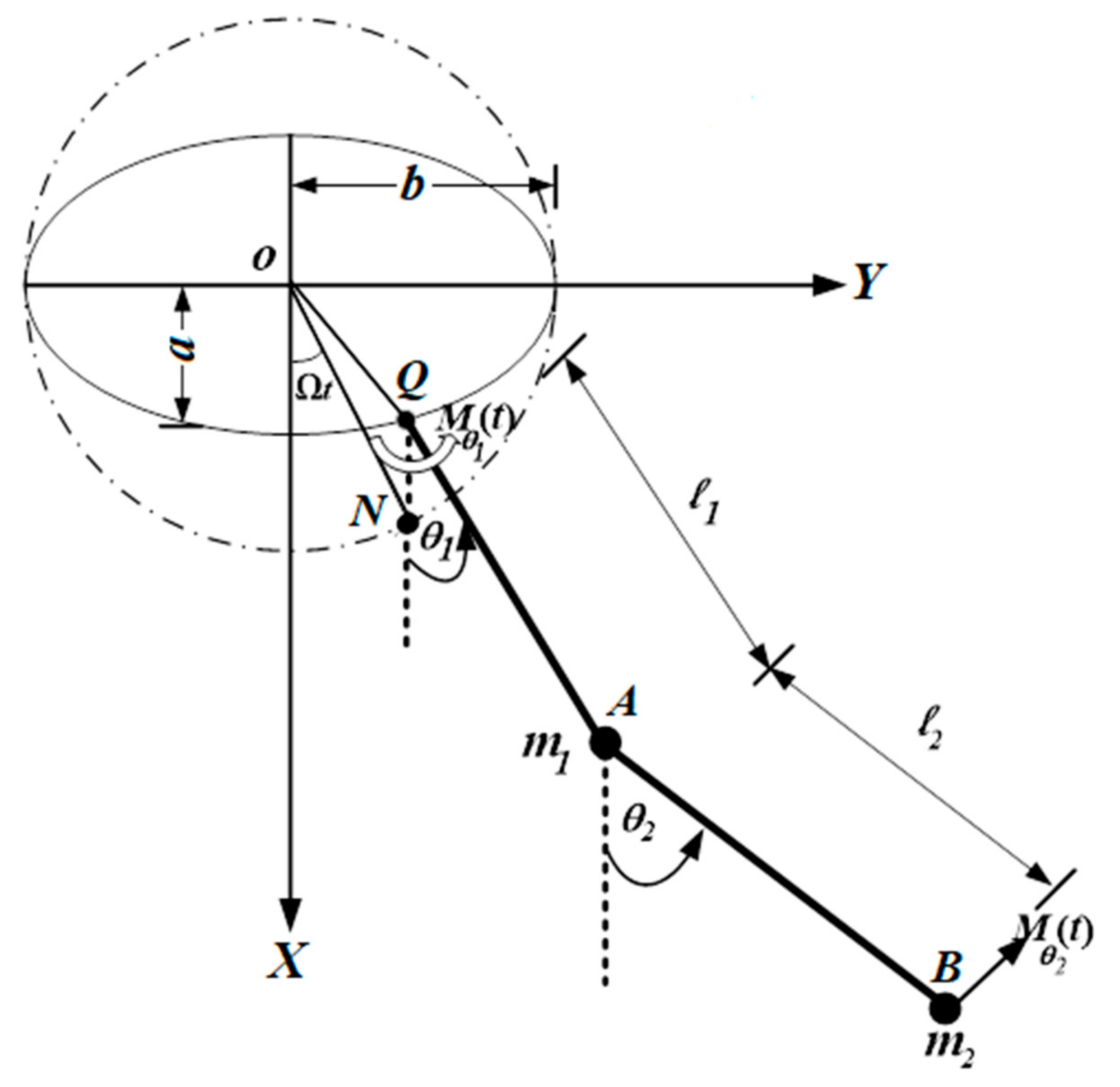
2. Dynamical Modelling
3. Analysis of the Solution
4. Vibrations and Conditions of Resonance
- For the second order approximation
- For the third order approximation
5. Steady-State Case
6. Non-Linear Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Strogatz, S.H. Nonlinear Dynamics and Chaos: With Applications to Physics, Biology, Chemistry, and Engineering, 2nd ed.; Princeton University Press: Princeton, NJ, USA, 2015. [Google Scholar]
- Melby, P.; Weber, N.; Hübler, A. Dynamics of self-adjusting systems with noise. Chaos 2005, 15, 33902. [Google Scholar] [CrossRef]
- Jackson, T.; Radunskaya, A. Applications of Dynamical Systems in Biology and Medicine; Springer: New York, NY, USA, 2015. [Google Scholar]
- Dubey, N.H. Engineering Mechanics: Statics and Dynamics; Tata McGraw-Hill Education: New York, NY, USA, 2013. [Google Scholar]
- Kyoung, L.W.; Dong, P.H. Chaotic dynamics of a harmonically excited spring-pendulum system with internal resonance. Nonlinear Dyn. 1197, 14, 211–229. [Google Scholar]
- Lee, W.; Hsu, C. A Global Analysis of an Harmonically Excited Spring-Pendulum System with Internal Resonance. J. Sound Vib. 1994, 171, 335–359. [Google Scholar] [CrossRef]
- Alasty, A.; Shabani, R. Chaotic motions and fractal basin boundaries in spring-pendulum system. Nonlinear Anal. Real World Appl. 2006, 7, 81–95. [Google Scholar] [CrossRef]
- Lee, W.K.; Park, H.D. Second-order approximation for chaotic responses of a harmonically excited spring–pendulum system. Int. J. Non-linear Mech. 1999, 34, 749–757. [Google Scholar] [CrossRef]
- Awrejcewicz, J.; Starosta, R.; Sypniewska-Kamińska, G. Asymptotic Analysis and Limiting Phase Trajectories in the Dynamics of Spring Pendulum; Springer International Publishing: Cham, Switzerland, 2014; pp. 161–173. [Google Scholar]
- Eissa, M.; Kamel, M.; El-Sayed, A.T. Vibration reduction of multi-parametric excited spring pendulum via a transversally tuned absorber. Nonlinear Dyn. 2010, 61, 109–121. [Google Scholar] [CrossRef]
- Awrejcewicz, J.; Starosta, R.; Sypniewska-Kamińska, G. Stationary and Transient Resonant Response of a Spring Pendulum. Procedia IUTAM 2016, 19, 201–208. [Google Scholar] [CrossRef] [Green Version]
- Kamińska, G.S.; Awrejcewicz, J.; Kamiński, H. Resonance study of spring pendulum based on asymptotic solutions with polynomial approximation in quadratic means. Meccanica 2020, 56, 963–980. [Google Scholar] [CrossRef]
- Bek, M.; Amer, T.; Sirwah, M.A.; Awrejcewicz, J.; Arab, A.A. The vibrational motion of a spring pendulum in a fluid flow. Results Phys. 2020, 19, 103465. [Google Scholar] [CrossRef]
- Starosta, R.; Sypniewska-Kaminska, G.; Awrejcewicz, J. Parametric and external resonances in kinematically and externally excited nonlinear spring pendulum. Int. J. Bifurc. Chaos 2011, 21, 3013–3021. [Google Scholar] [CrossRef]
- Amer, T.; Bek, M. Chaotic responses of a harmonically excited spring pendulum moving in circular path. Nonlinear Anal. Real World Appl. 2009, 10, 3196–3202. [Google Scholar] [CrossRef]
- Amer, T.S.; Bek, M.A.; Hamada, I.S. On the Motion of Harmonically Excited Spring Pendulum in Elliptic Path Near Resonances. Adv. Math. Phys. 2016, 2016, 15. [Google Scholar] [CrossRef] [Green Version]
- Amer, T.S.; Bek, M.A.; Abouhmr, M.K. On the vibrational analysis for the motion of a harmonically damped rigid body pendulum. Nonlinear Dyn. 2018, 91, 2485–2502. [Google Scholar] [CrossRef]
- Amer, T.; Bek, M.; Abohamer, M. On the motion of a harmonically excited damped spring pendulum in an elliptic path. Mech. Res. Commun. 2019, 95, 23–34. [Google Scholar] [CrossRef]
- Amer, W.; Bek, M.; Abohamer, M. On the motion of a pendulum attached with tuned absorber near resonances. Results Phys. 2018, 11, 291–301. [Google Scholar] [CrossRef]
- Starosta, R.; Sypniewska-Kaminska, G.; Awrejcewicz, J. Asymptotic analysis of kinematically excited dynamical systems near resonances. Nonlinear Dyn. 2012, 68, 459–469. [Google Scholar] [CrossRef]
- Awrejcewicz, J.; Starosta, R.; Sypniewska-Kamińska, G. Asymptotic Analysis of Resonances in Nonlinear Vibrations of the 3-dof Pendulum. Differ. Equ. Dyn. Syst. 2013, 21, 123–140. [Google Scholar] [CrossRef]
- El-Sabaa, F.M.; Amer, T.S.; Gad, H.M.; Bek, M.A. On the motion of a damped rigid body near resonances under the influence of harmonically external force and moments. Results Phys. 2020, 19, 103352. [Google Scholar] [CrossRef]
- Gupta, M.K.; Sinha, N.; Bansal, K.; Singh, A.K. Natural frequencies of multiple pendulum systems under free condition. Arch. Appl. Mech. 2016, 86, 1049–1061. [Google Scholar] [CrossRef]
- Gupta, M.K.; Sharma, P.; Mondal, A.K.; Kumar, A. Visual Recurrence Analysis of Chaotic and Regular Motion of a Multiple Pendulum System. Arab. J. Sci. Eng. 2017, 42, 2711–2716. [Google Scholar] [CrossRef]
- Amer, T.; Bek, M.; Hassan, S.; Elbendary, S. The stability analysis for the motion of a nonlinear damped vibrating dynamical system with three-degrees-of-freedom. Results Phys. 2021, 28, 104561. [Google Scholar] [CrossRef]
- Nayfeh, A.H. Perturbations Methods; WILEY-VCH Verlag GmbH and Co. KGaA: Weinheim, Germany, 2004. [Google Scholar]
- Gantmacher, F.R. Applications of the Theory of Matrices; John Wiley & Sons: New York, NY, USA, 2005. [Google Scholar]
- Abady, I.; Amer, T.; Gad, H.; Bek, M. The asymptotic analysis and stability of 3DOF non-linear damped rigid body pendulum near resonance. Ain Shams Eng. J. 2021. [Google Scholar] [CrossRef]
- Abohamer, M.K.; Awrejcewicz, J.; Starosta, R.; Amer, T.S.; Bek, M.A. Influence of the Motion of a Spring Pendulum on Energy-Harvesting Devices. Appl. Sci. 2021, 11, 8658. [Google Scholar] [CrossRef]
- He, J.-H.; Amer, T.S.; Elnaggar, S.; Galal, A.A. Periodic Property and Instability of a Rotating Pendulum System. Axioms 2021, 10, 191. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amer, T.S.; Starosta, R.; Elameer, A.S.; Bek, M.A. Analyzing the Stability for the Motion of an Unstretched Double Pendulum near Resonance. Appl. Sci. 2021, 11, 9520. https://doi.org/10.3390/app11209520
Amer TS, Starosta R, Elameer AS, Bek MA. Analyzing the Stability for the Motion of an Unstretched Double Pendulum near Resonance. Applied Sciences. 2021; 11(20):9520. https://doi.org/10.3390/app11209520
Chicago/Turabian StyleAmer, Tarek S., Roman Starosta, Abdelkarim S. Elameer, and Mohamed A. Bek. 2021. "Analyzing the Stability for the Motion of an Unstretched Double Pendulum near Resonance" Applied Sciences 11, no. 20: 9520. https://doi.org/10.3390/app11209520
APA StyleAmer, T. S., Starosta, R., Elameer, A. S., & Bek, M. A. (2021). Analyzing the Stability for the Motion of an Unstretched Double Pendulum near Resonance. Applied Sciences, 11(20), 9520. https://doi.org/10.3390/app11209520