Modified Viterbi Algorithm with Feedback Using a Two-Dimensional 3-Way Generalized Partial Response Target for Bit-Patterned Media Recording Systems


Abstract
:1. Introduction
2. N-Way GPR Target and N-Way Detection
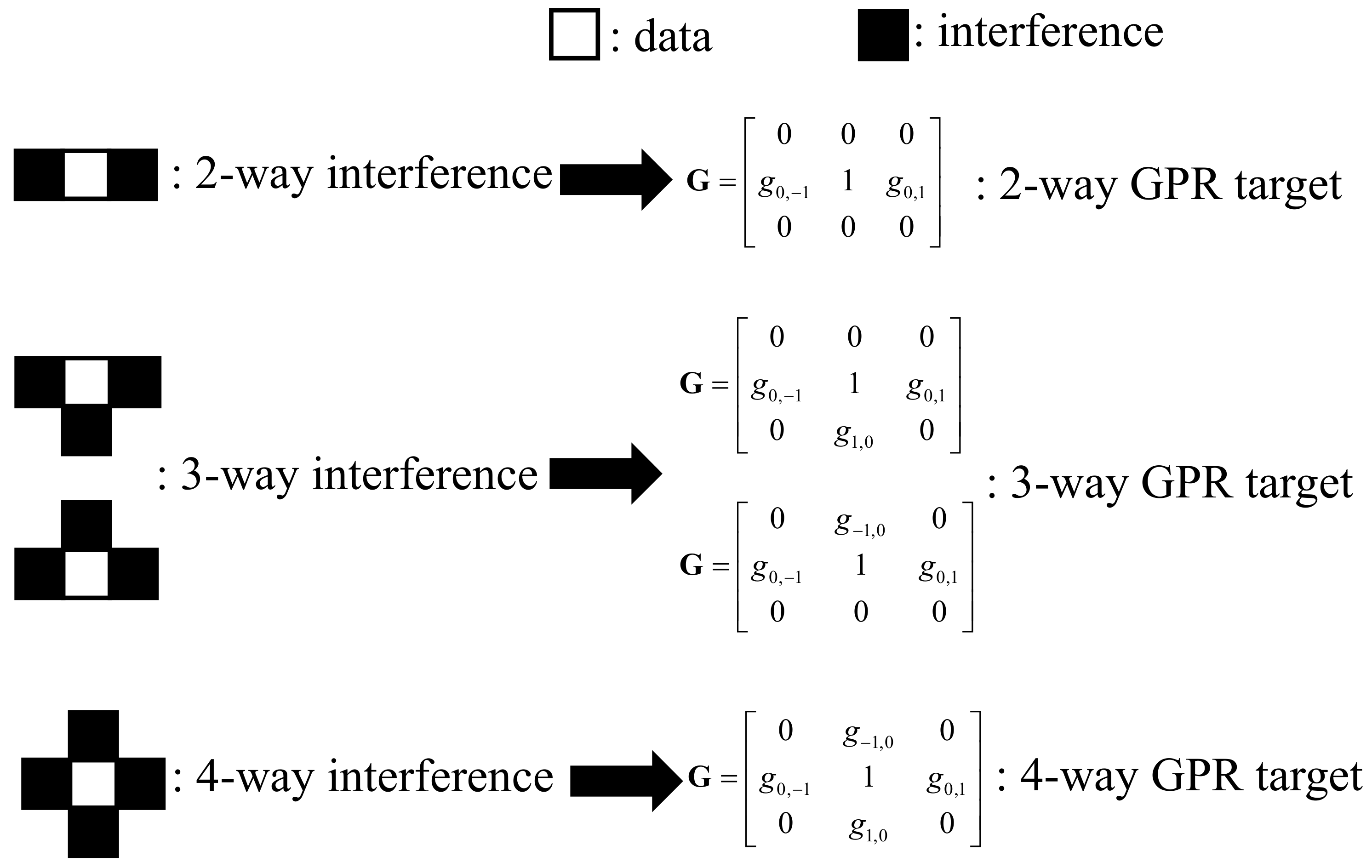
2.1. N-Way GPR Target
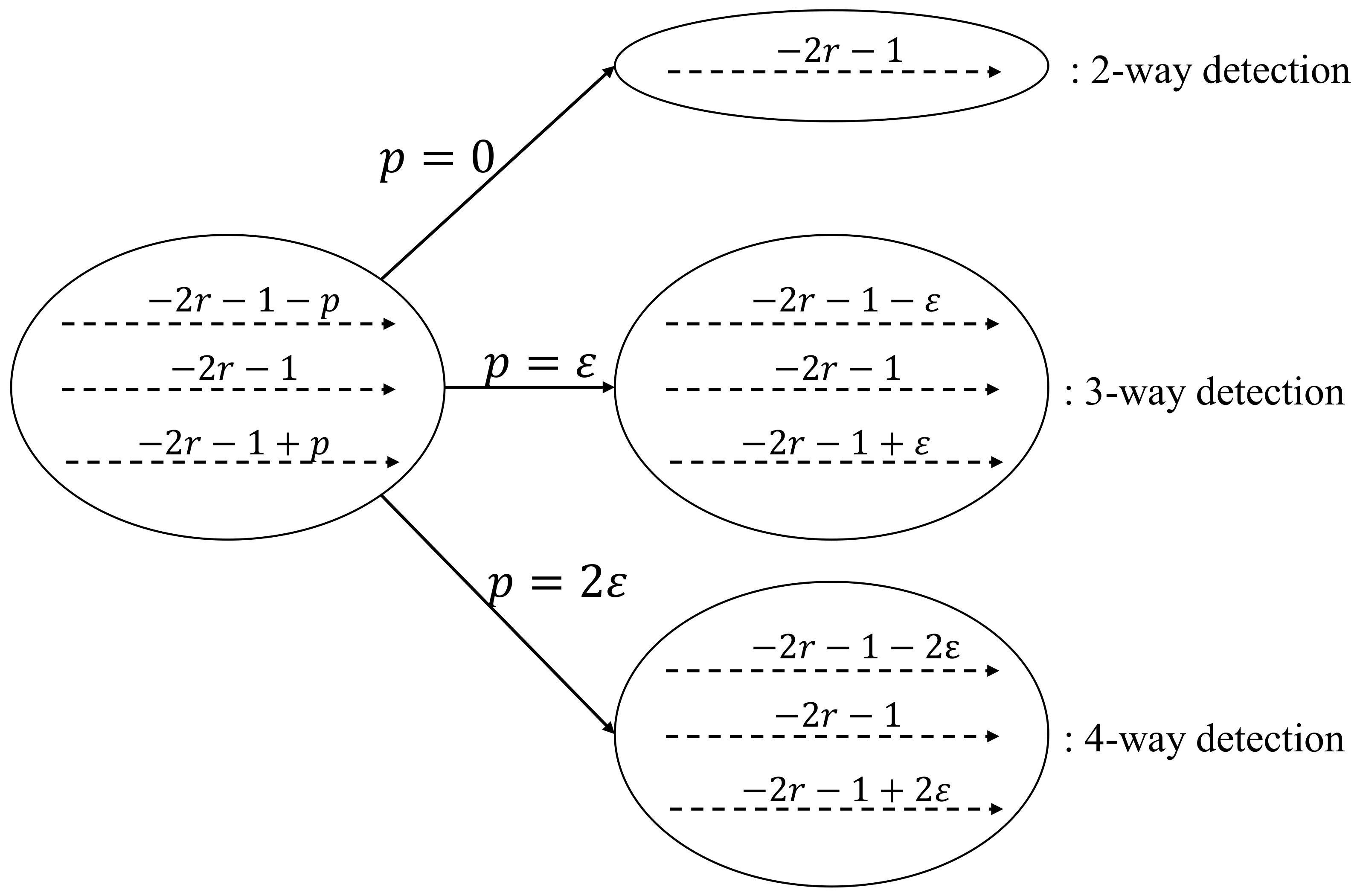
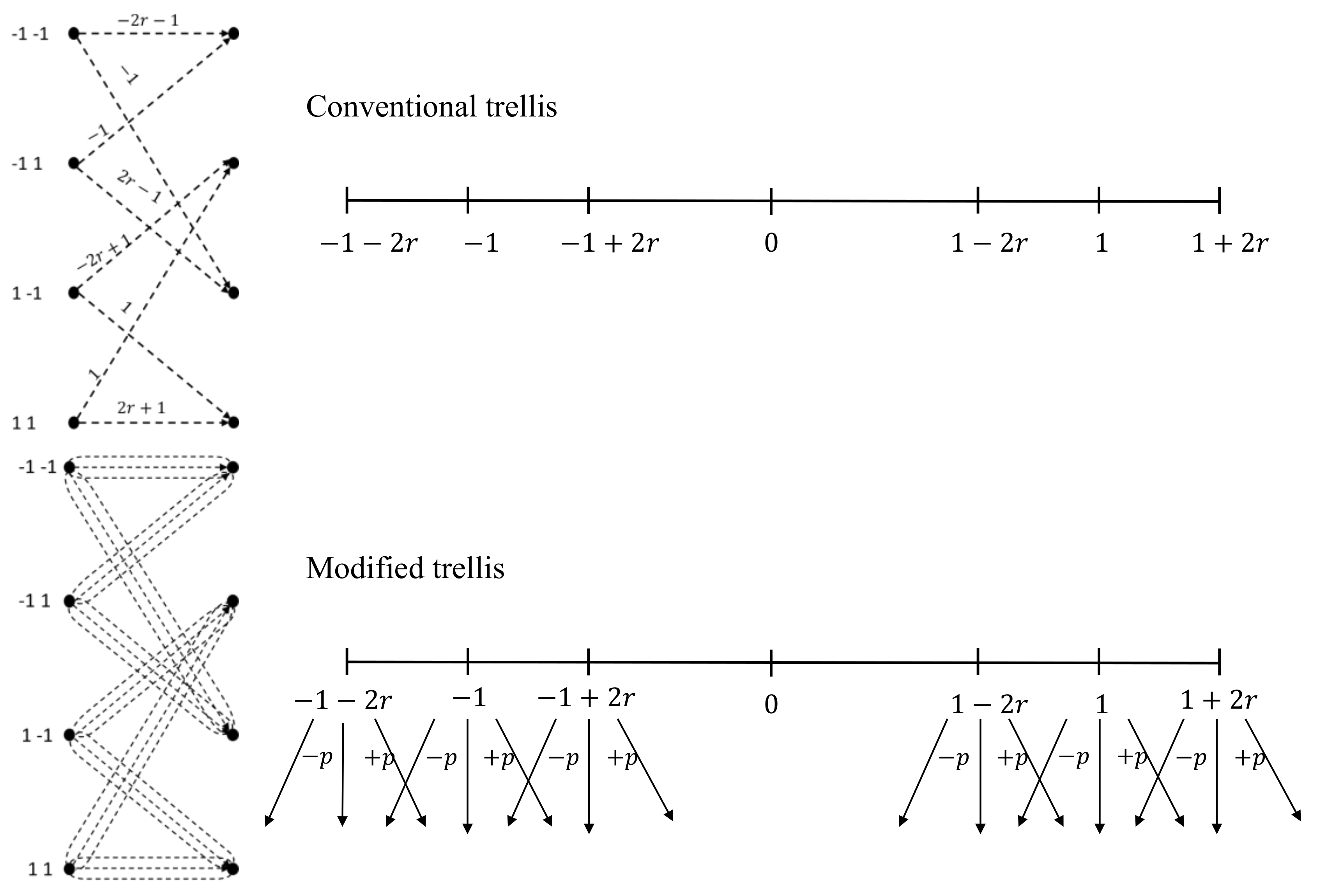
2.2. N-Way Detection
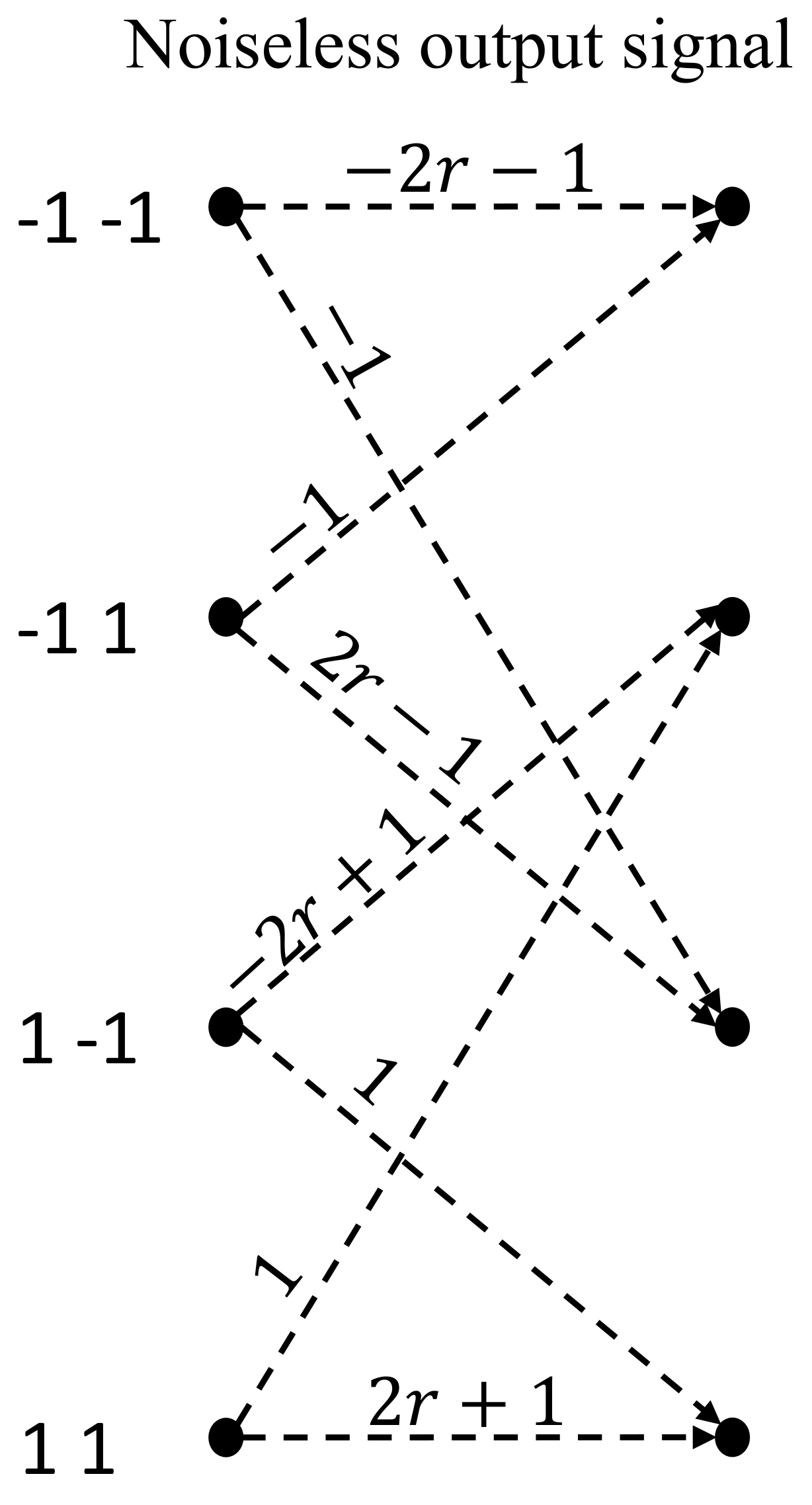
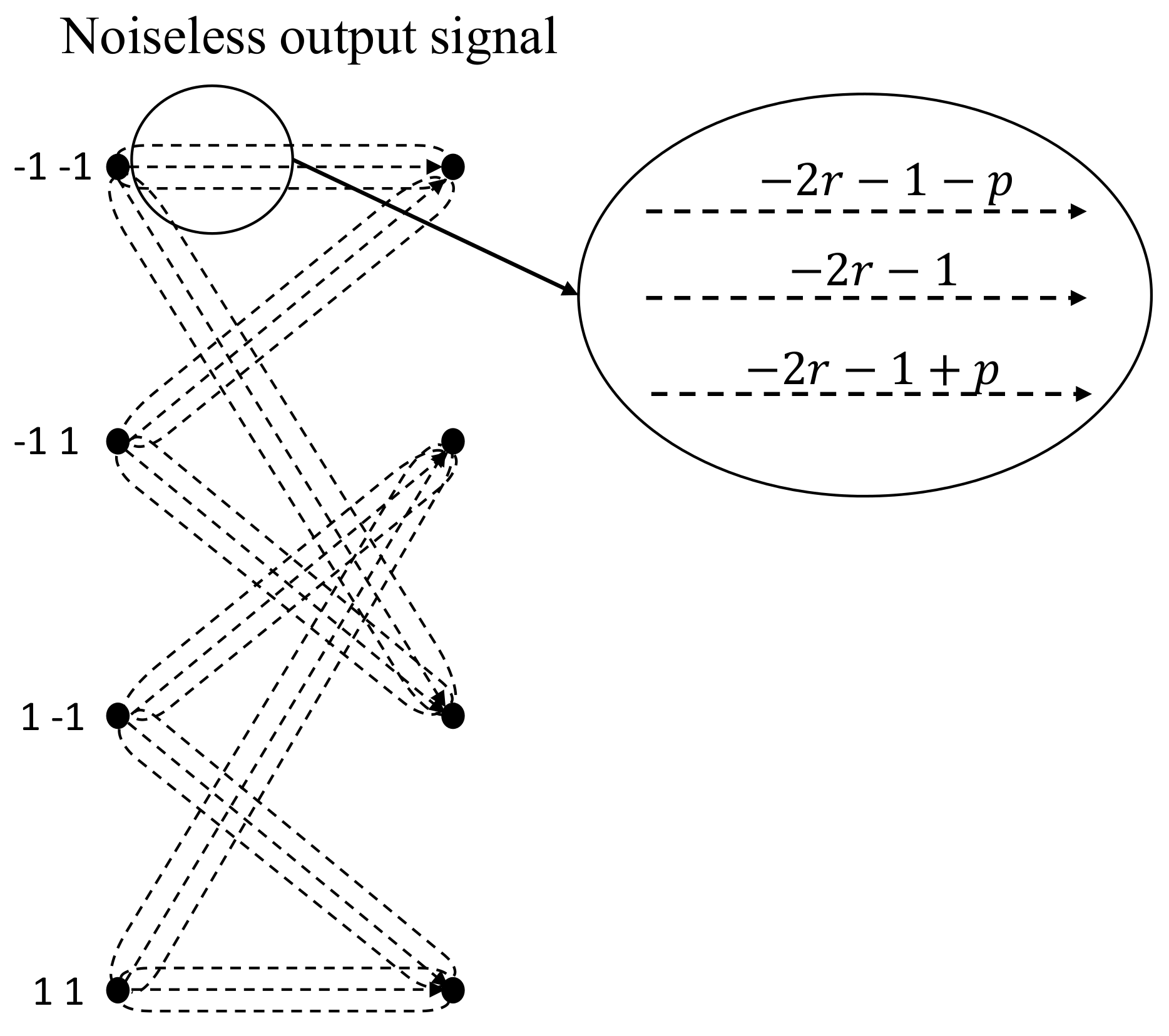
2.3. Alias Phenomenon of the Output Value
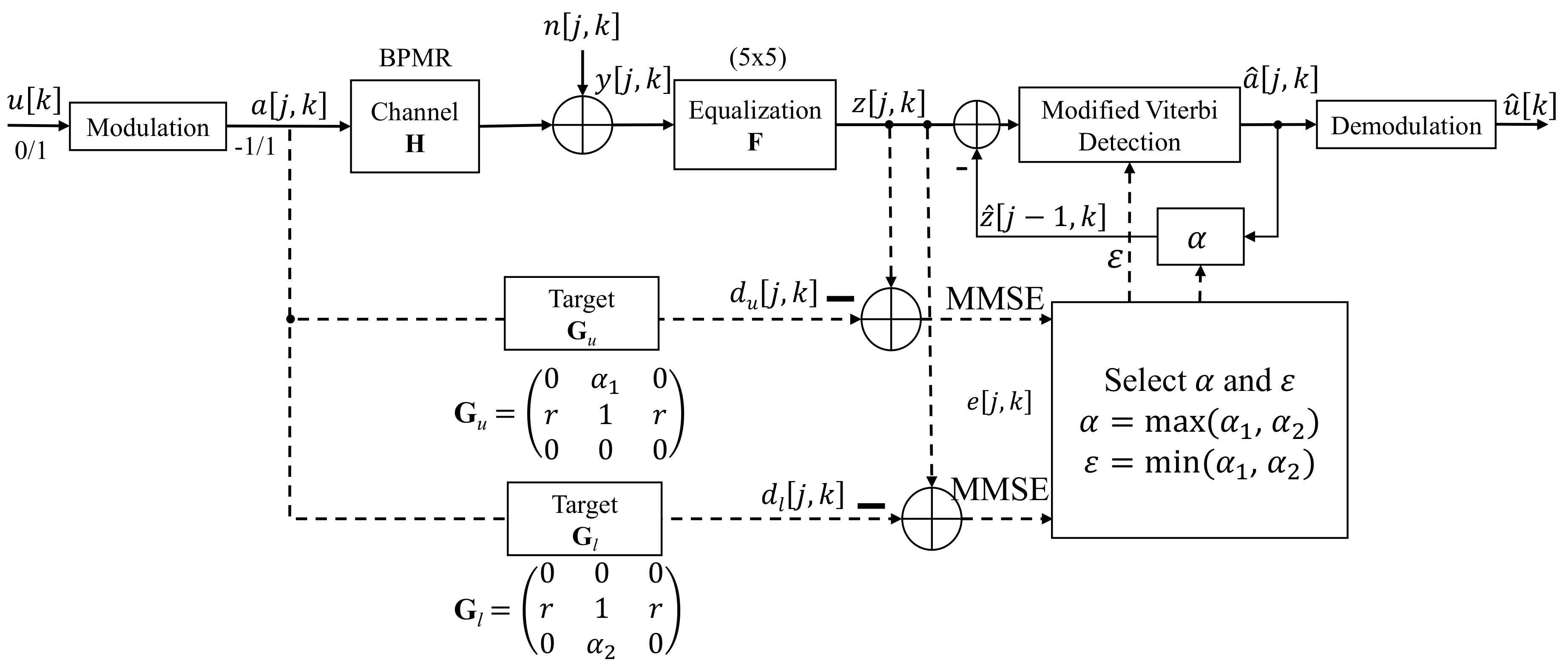
3. Proposed System Model
3.1. BPMR Channel
3.2. Equalizer and GPR Target
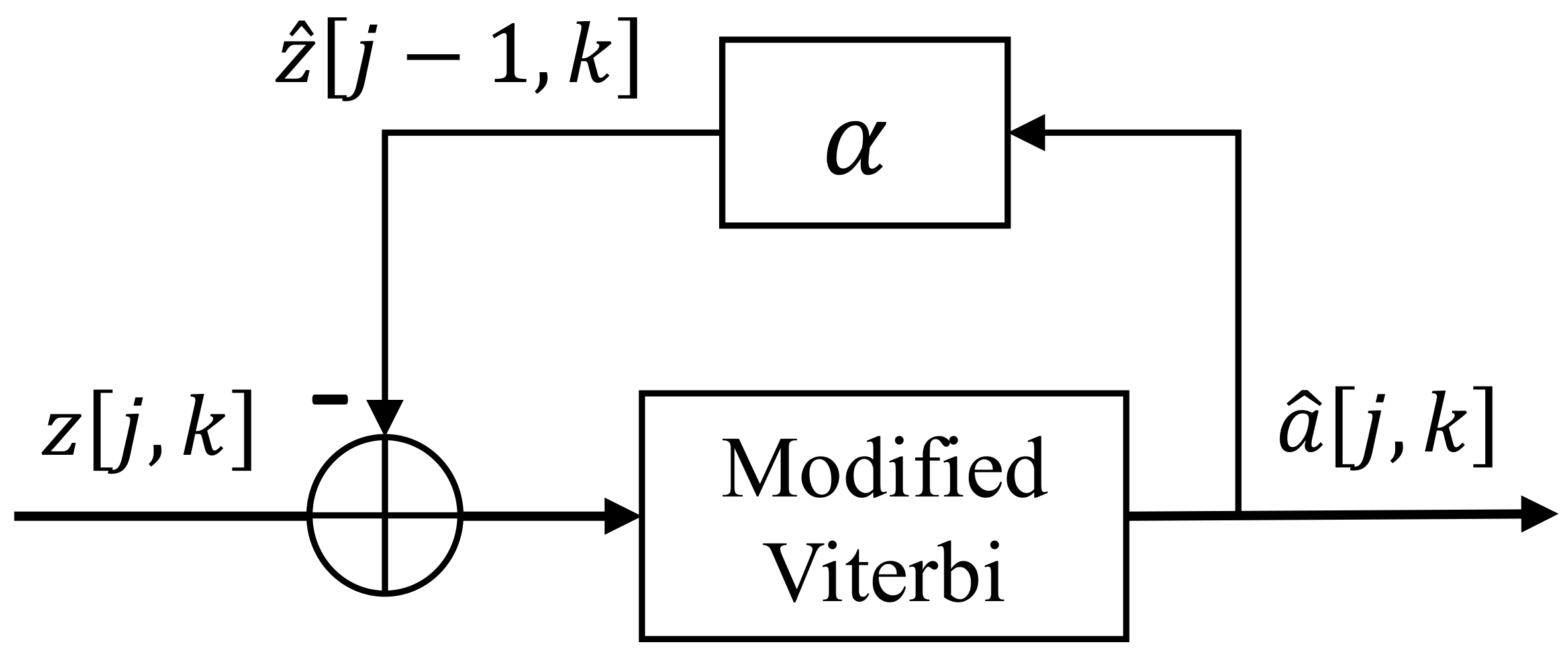
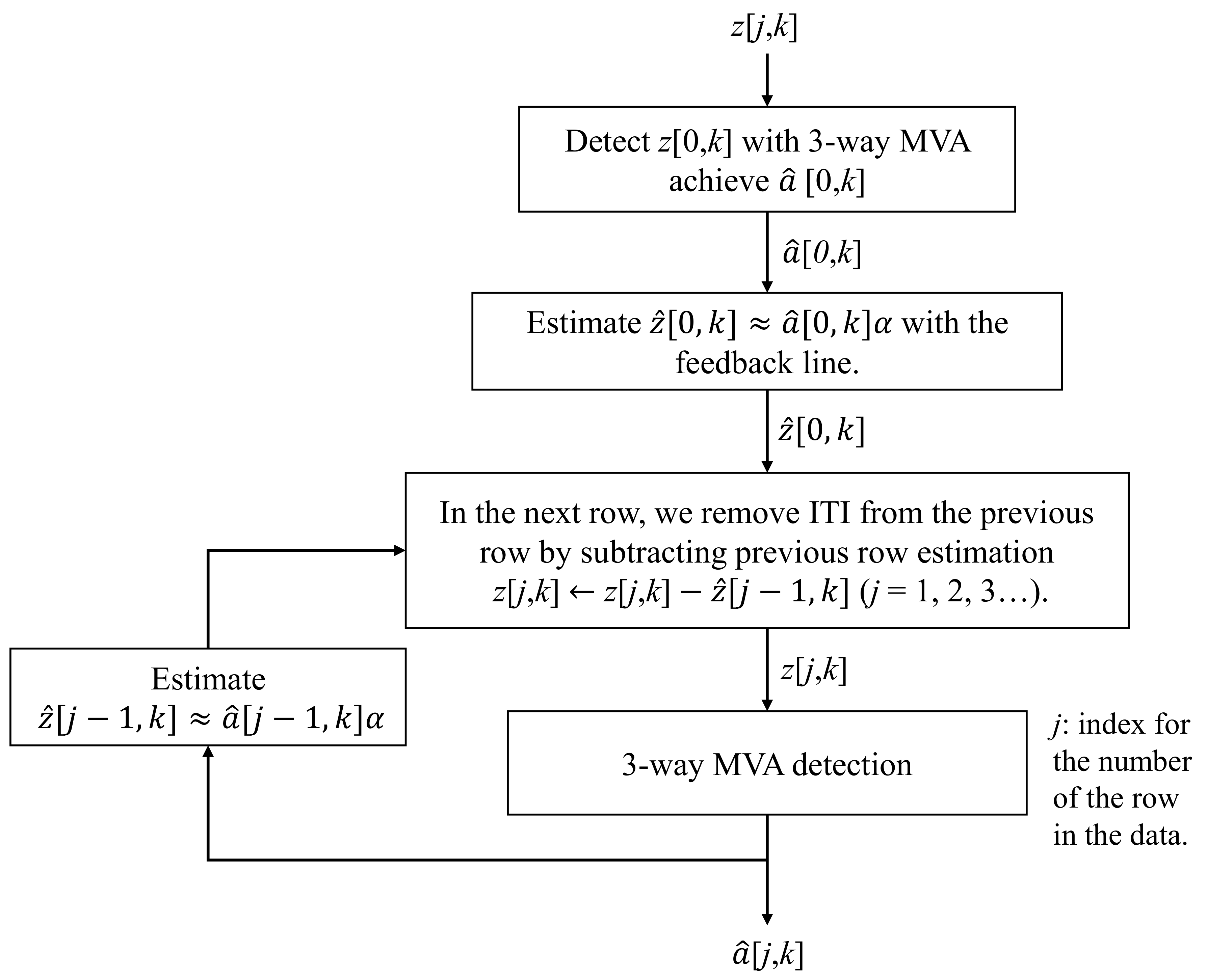
3.3. Three-Way GPR Target and Three-Way MVA with Feedback
| Algorithm 1 Detection procedure of three-way MVA with feedback |
| Input: Received data . Output: Estimation of original signal [j,k]. 1: Detect the first row of using a three-way MVA. 2:. 3: while number of rows do 4: Compute . ( is known from the estimated target.) 5: Calculate . 6: Detect using a three-way MVA. 7:. 8: end while 9: Return [j,k]. |
4. Simulation Results and Discussion
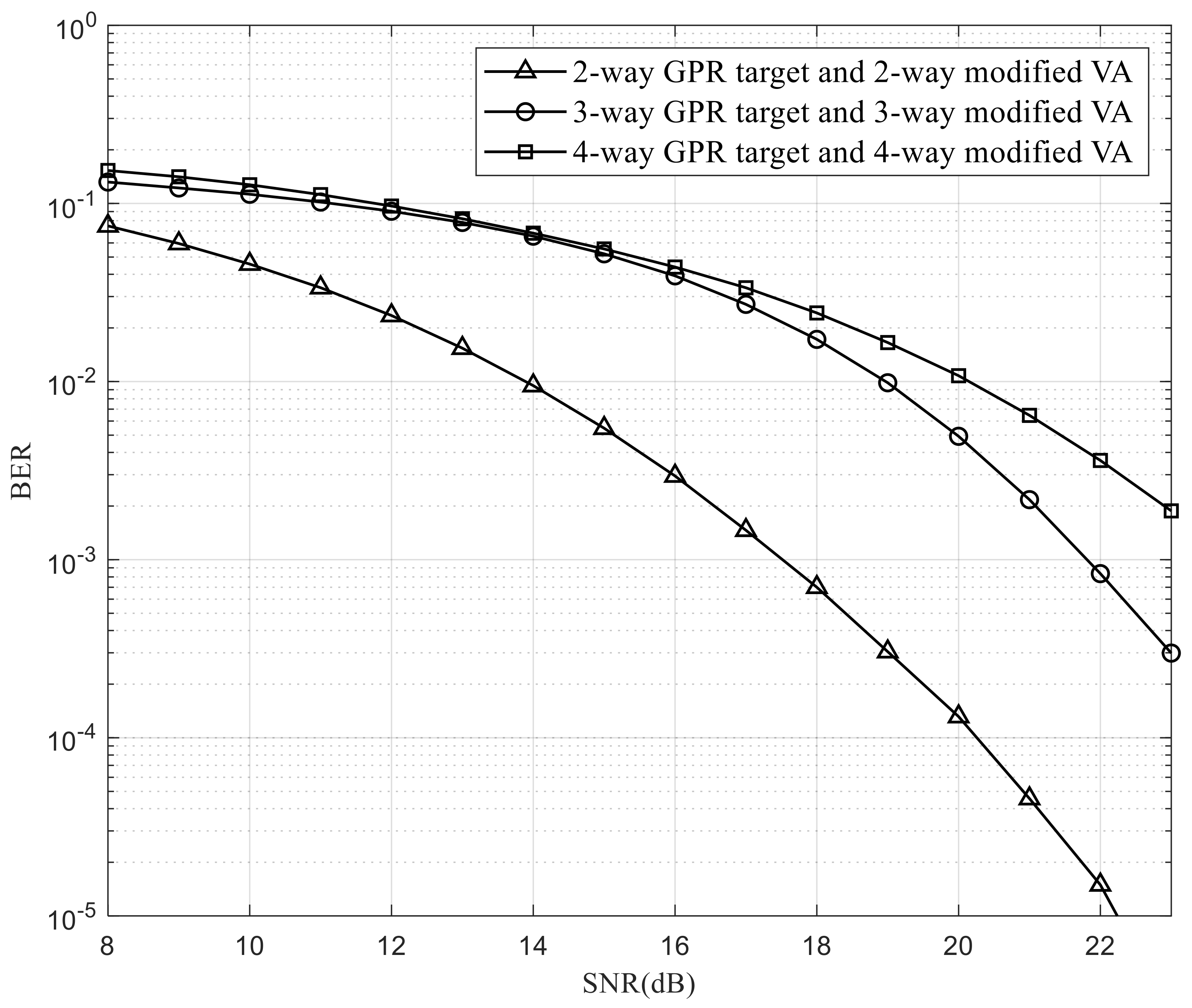
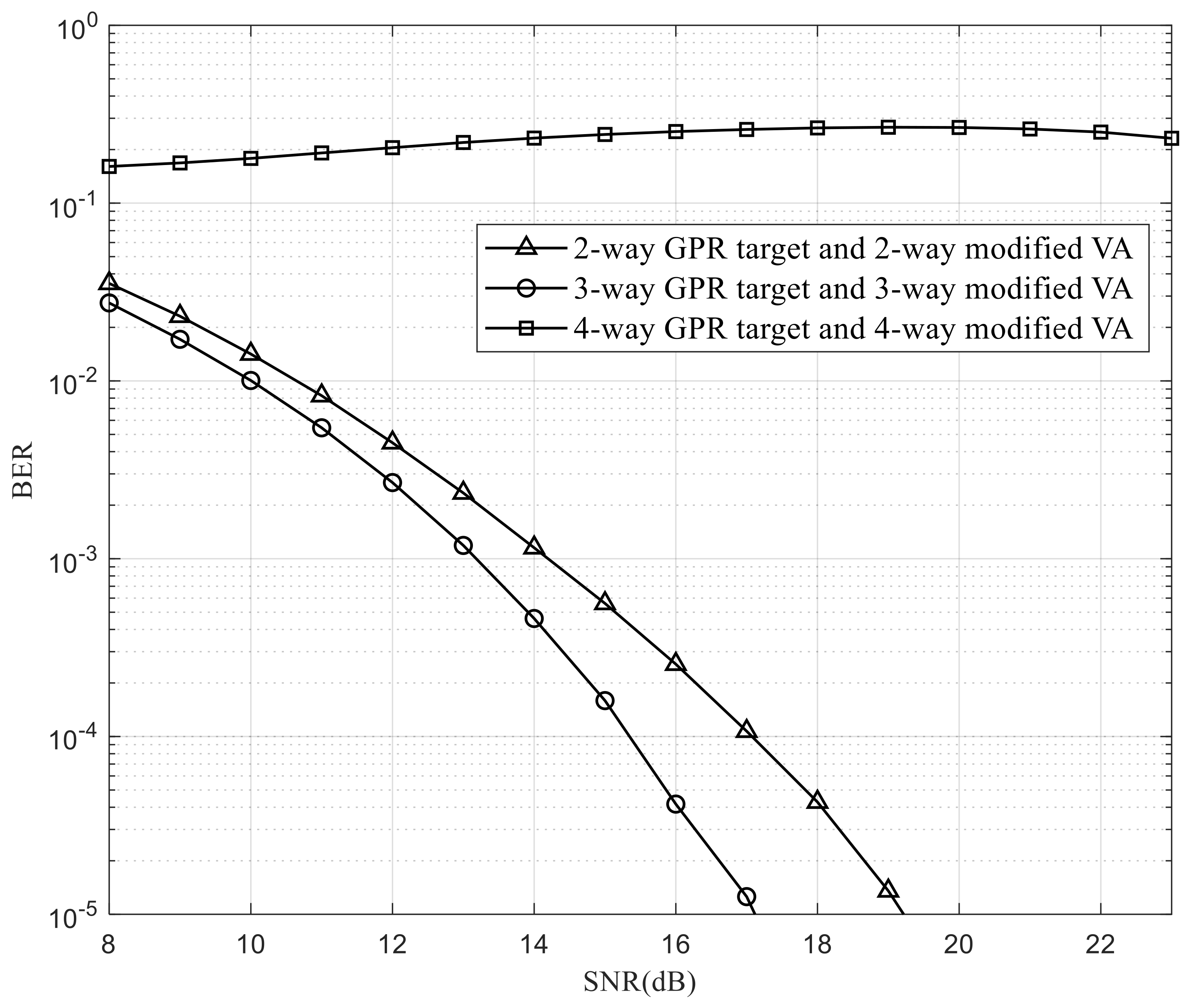
4.1. N-Way GPR Target and N-Way Detection
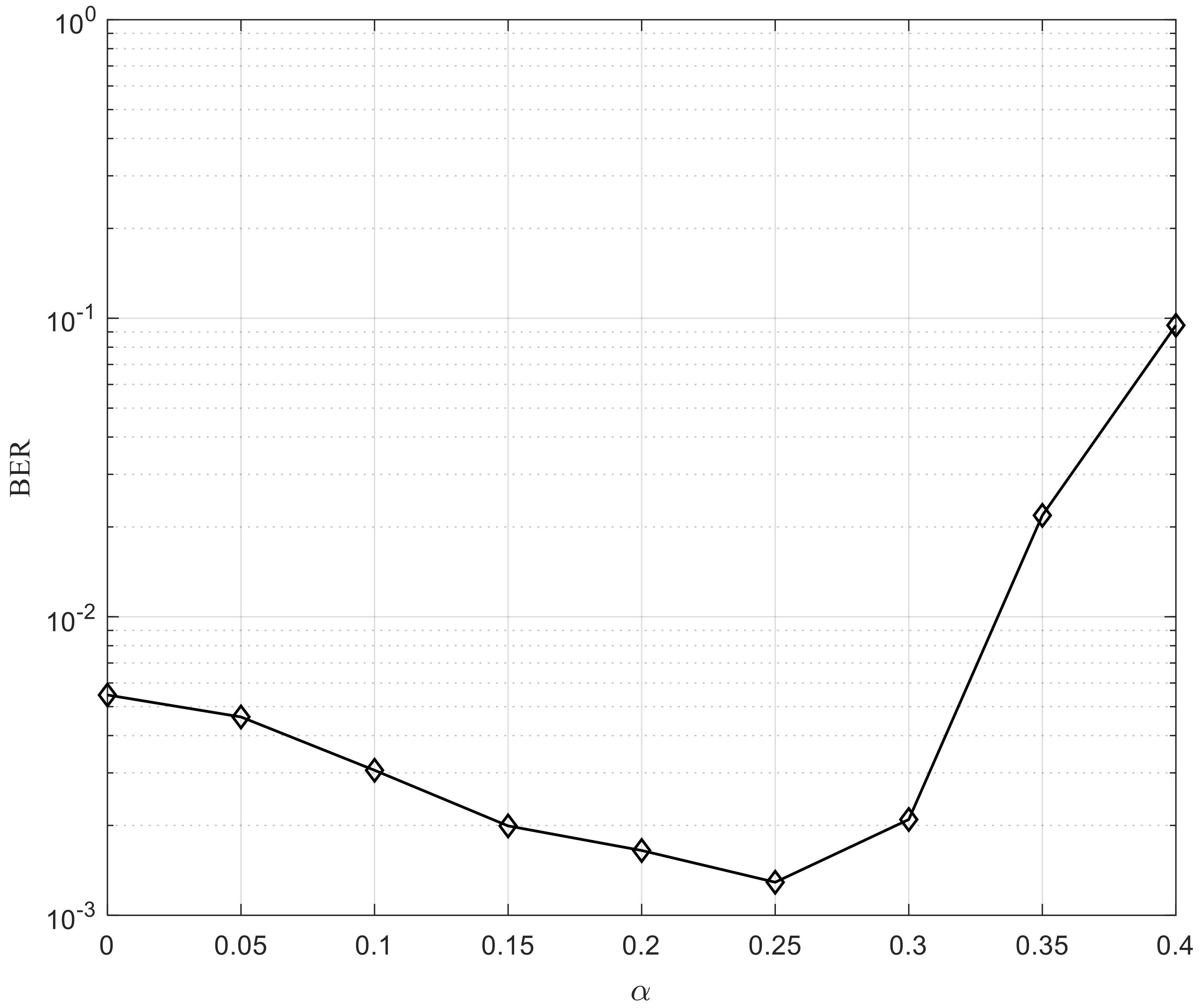
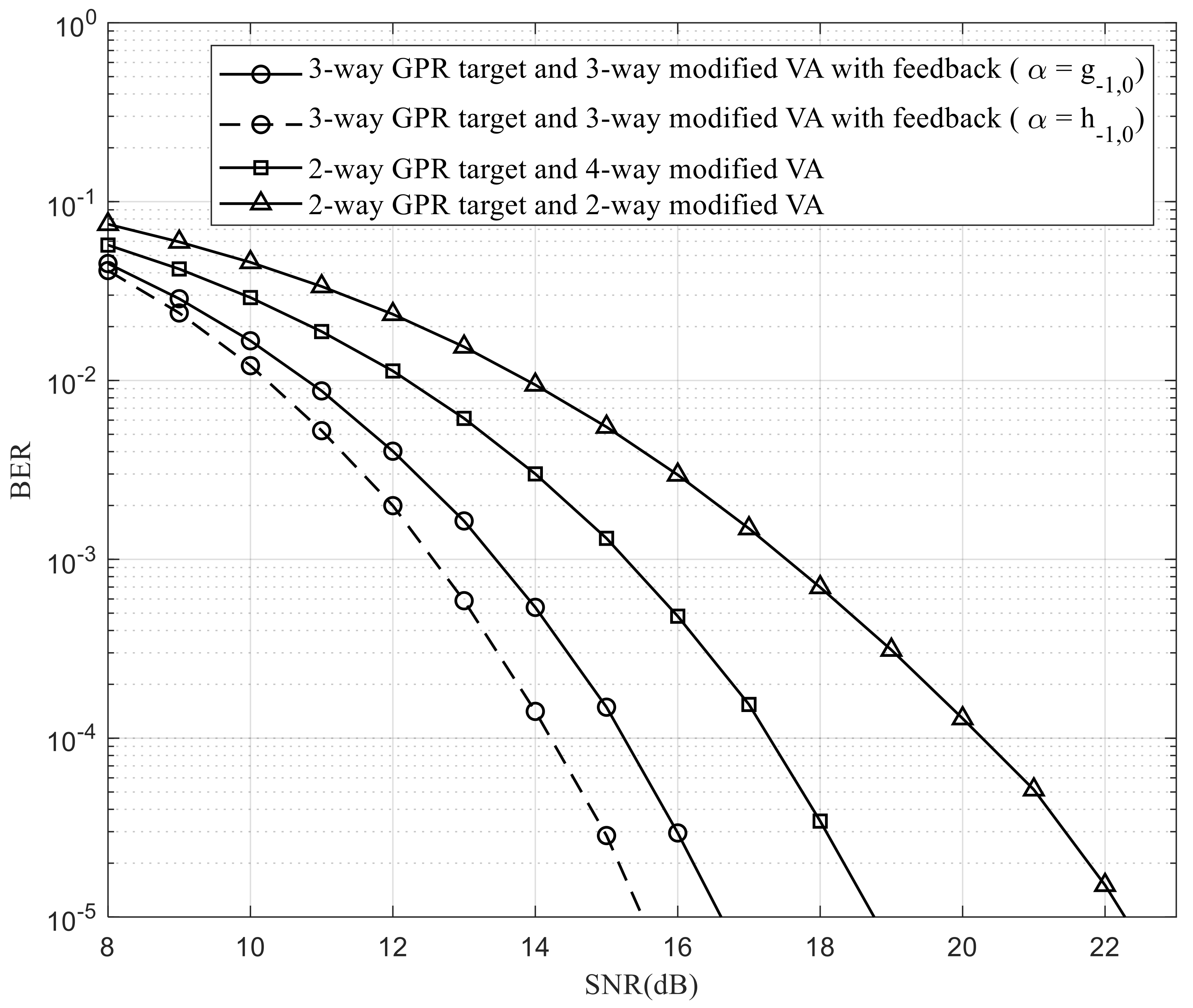
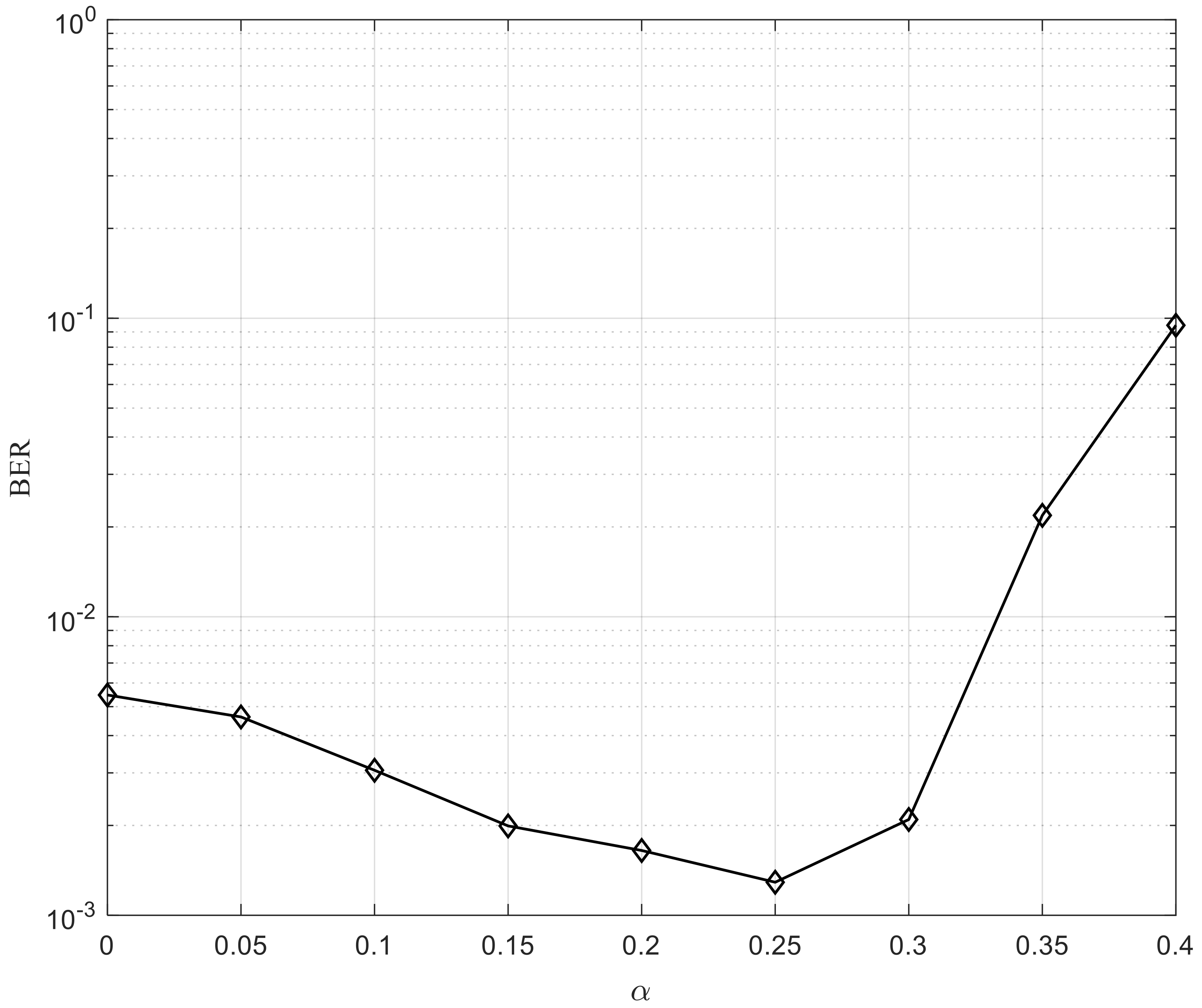
4.2. The Proposed Model
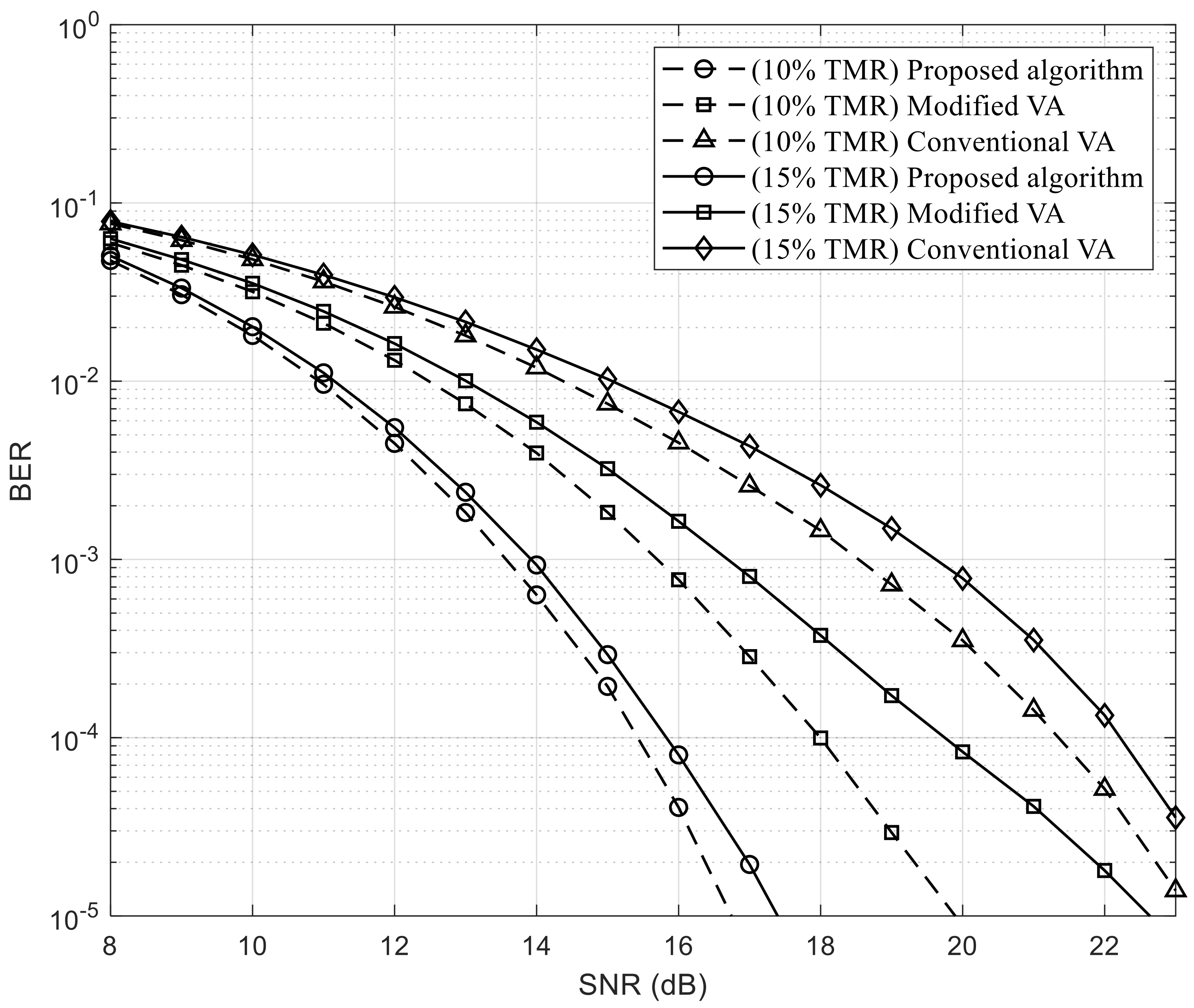
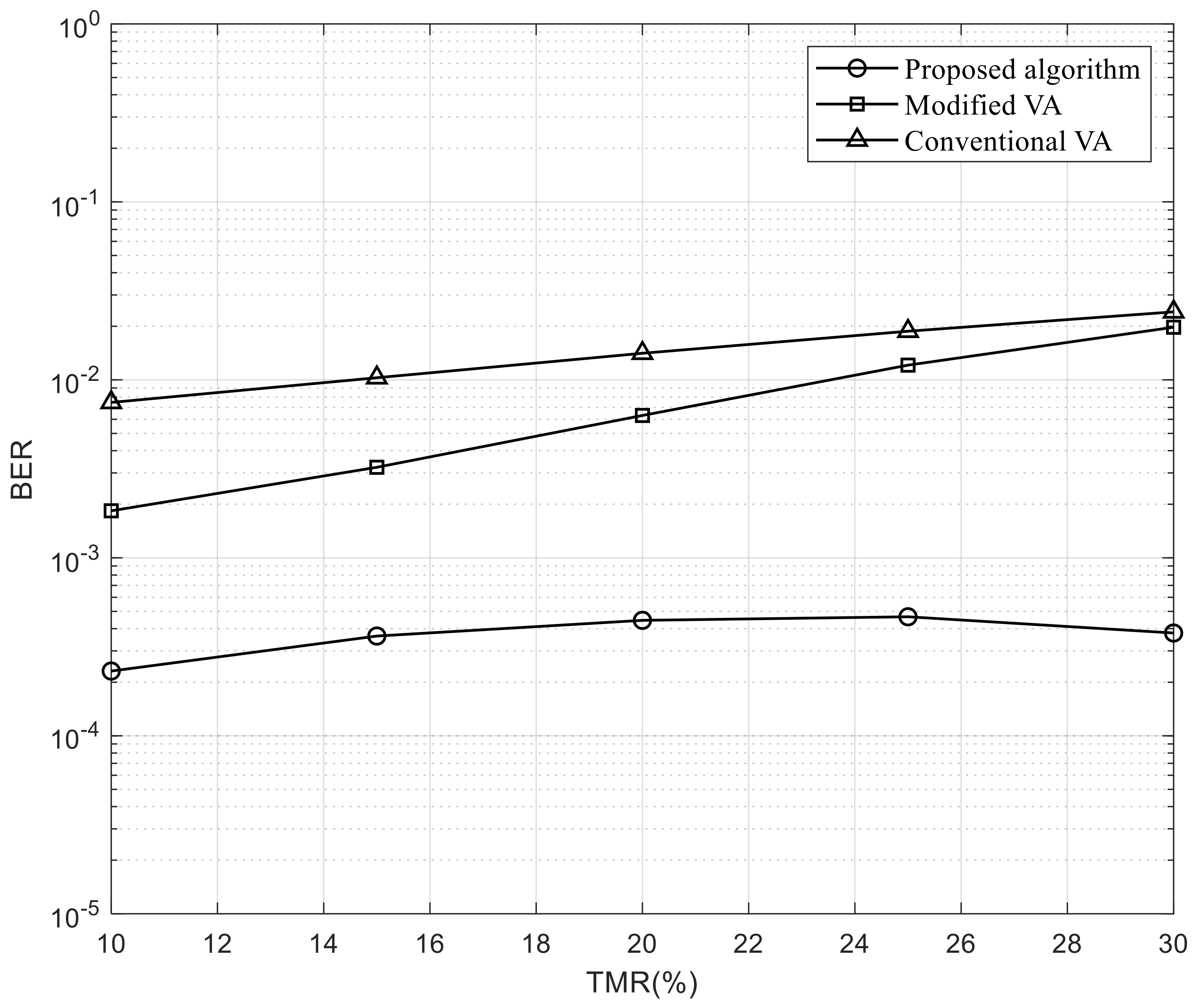
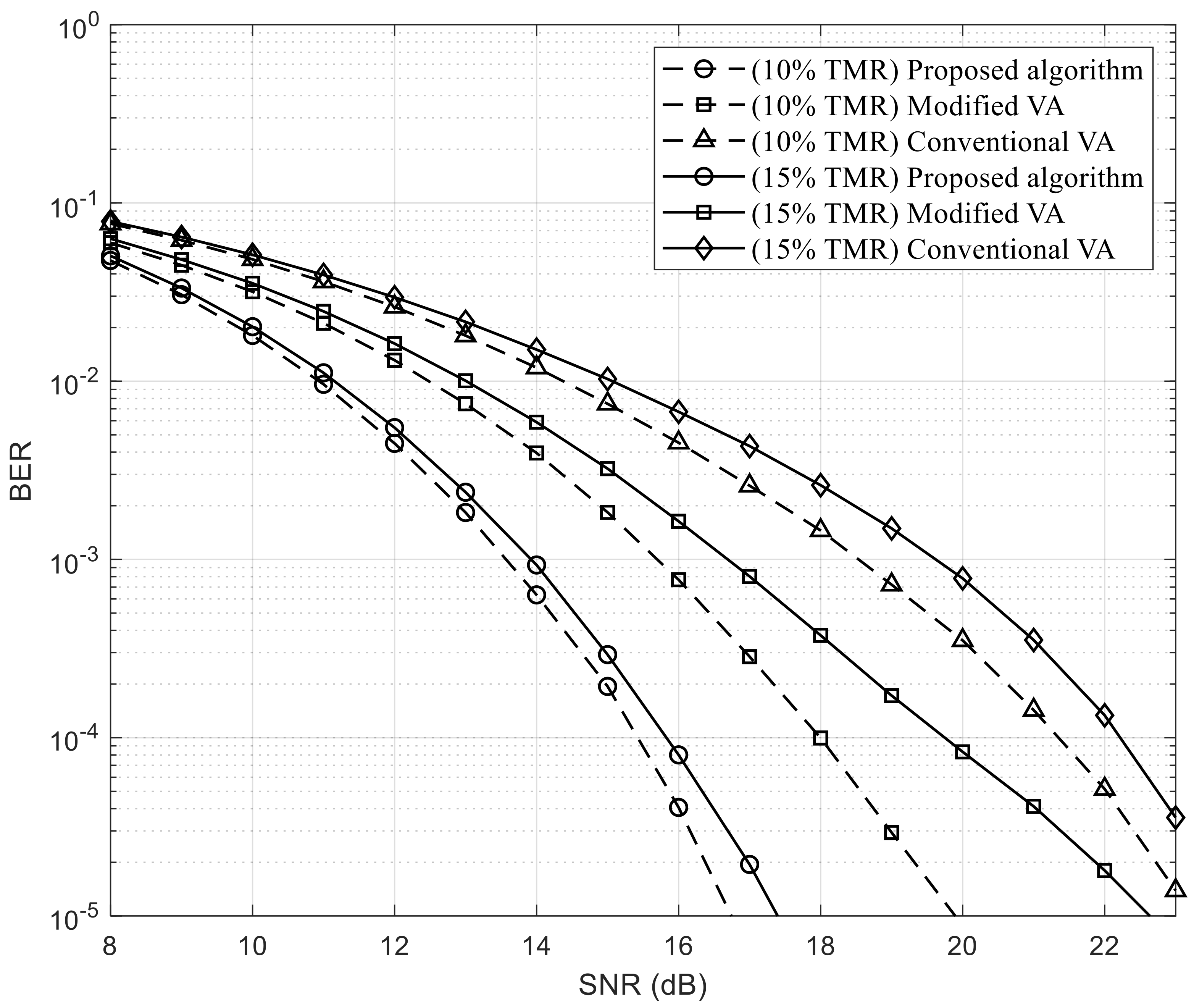
4.3. TMR Effect in BPMR Channel
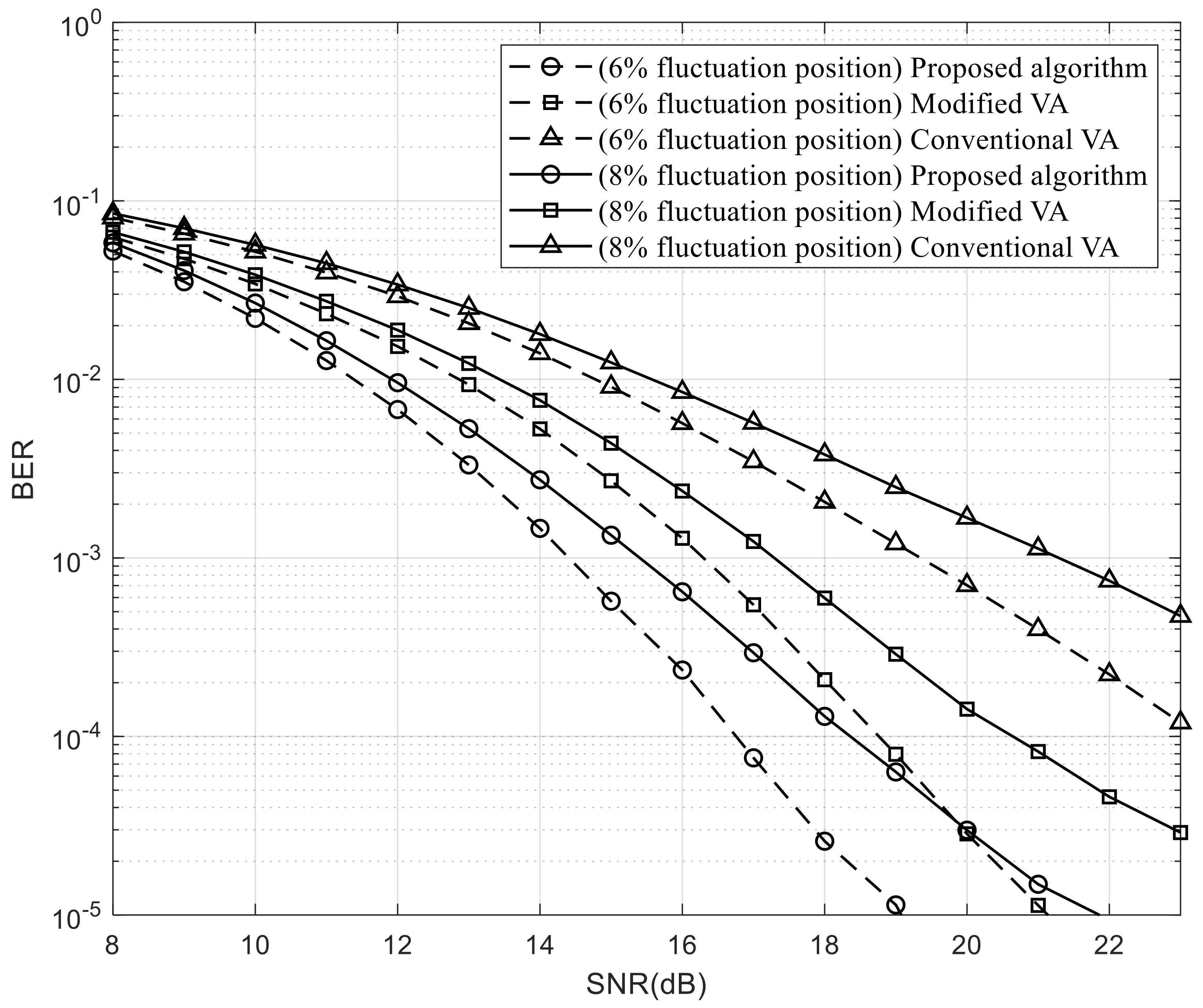
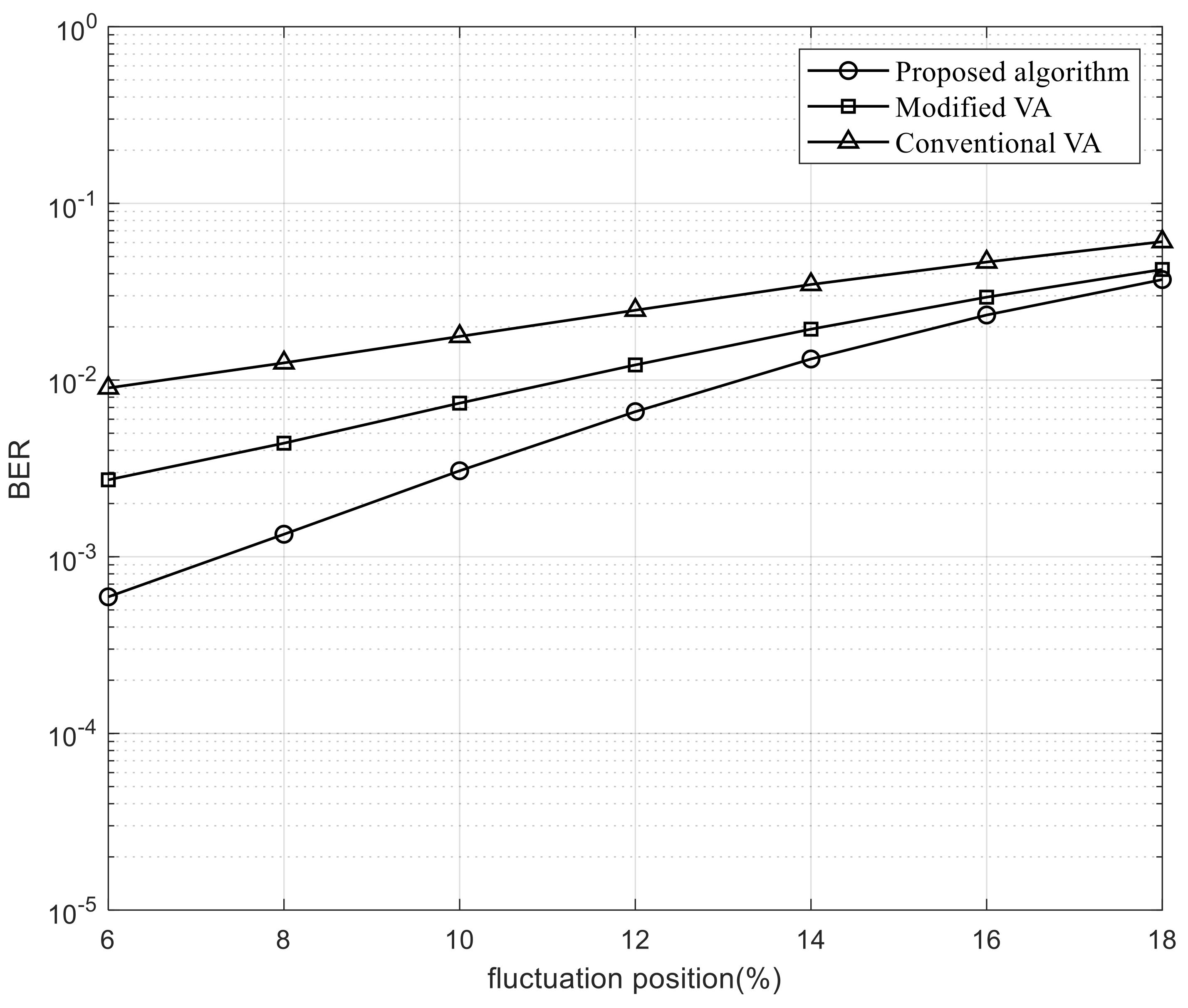
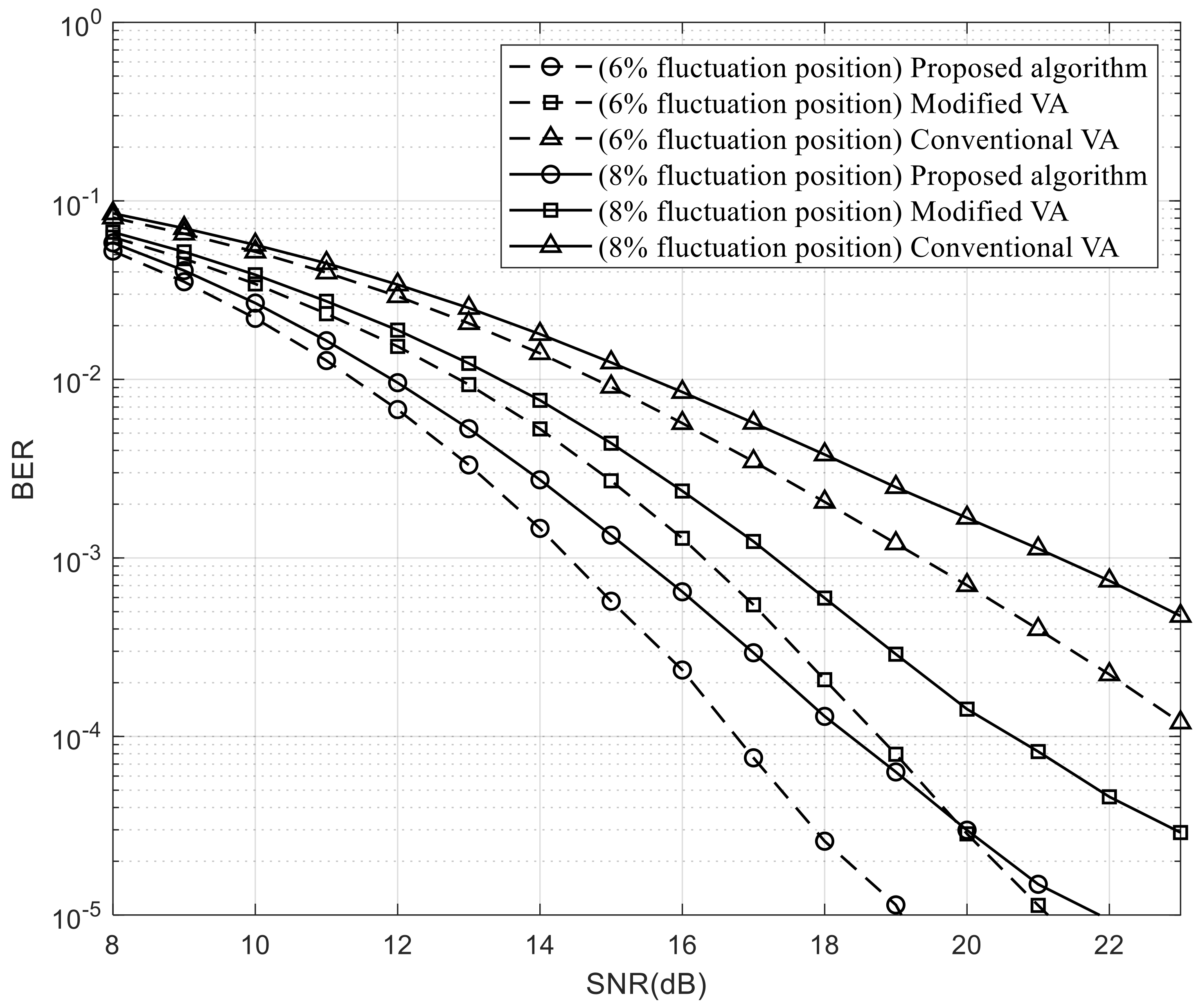
4.4. Media Noise in BPMR Channel
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Thompson, D.A.; Best, J.S. The future of magnetic data storage technology. IBM J. Res. Dev. 2000, 44, 311–322. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, J. Three typical bit position patterns of bit-patterned media recording. IEEE Magn. Lett. 2018, 9, 1–4. [Google Scholar] [CrossRef]
- Rottmayer, R.E.; Batra, S.; Buechel, D.; Challener, W.A.; Hohlfeld, J.; Kubota, Y.; Li, L.; Lu, B.; Mihalcea, C.; Mountfield, K.; et al. Heat-assisted magnetic recording. IEEE Trans. Magn. 2006, 42, 2417–2421. [Google Scholar] [CrossRef]
- Zhu, J.; Zhu, X.; Tang, Y. Microwave assisted magnetic recording. IEEE Trans. Magn. 2008, 44, 125–131. [Google Scholar] [CrossRef]
- Wood, R.; Williams, M.; Kavcic, A.; Miles, J. The feasibility of magnetic recording at 10 terabits per square inch on conventional media. IEEE Trans. Magn. 2009, 45, 917–923. [Google Scholar] [CrossRef]
- Honda, N.; Yamakawa, K.; Ouchi, K. Recording simulation of patterned media toward 2 Tb/in2. IEEE Trans. Magn. 2007, 43, 2142–2144. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, J. Modulation code and multilayer perceptron decoding for bit-patterned media recording. IEEE Magn. Lett. 2020, 11, 1–5. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. Error-correcting 5/6 modulation code for staggered bit-patterned media recording systems. IEEE Magn. Lett. 2019, 10, 1–5. [Google Scholar] [CrossRef]
- Buajong, C.; Warisarn, C. Improve in bit error rate with a combination of a rate-3/4 modulation code and intertrack interference subtraction for array-reader-based magnetic recording. IEEE Magn. Lett. 2019, 10, 1–5. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Partial response maximum likelihood detections using two-dimensional soft output viterbi algorithm with two-dimensional equalizer for holographic data storage. Jpn. J. Appl. Phys. 2009, 48, 03A003. [Google Scholar] [CrossRef]
- Kim, J.; Moon, Y.; Lee, J. Iterative two-dimensional soft output viterbi algorithm for patterned media. IEEE Trans. Magn. 2011, 47, 594–597. [Google Scholar] [CrossRef]
- Nabavi, S.; Kumar, B.V.K.V.; Zhu, J. Modifying viterbi algorithm to mitigate intertrack interference in bit-patterned media. IEEE Trans. Magn. 2007, 43, 2274–2276. [Google Scholar] [CrossRef]
- Wang, Y.; Kumar, B.V.K.V. Bidirectional decision feedback modified viterbi detection (BD-DFMV) for shingled bit-patterned magnetic recording (BPMR) with 2D sectors and alternating track widths. IEEE J. Sel. Areas Commun. 2016, 34, 2450–2462. [Google Scholar] [CrossRef]
- Nabavi, S.; Kumar, B.V.K.V.; Bain, J.A. Mitigating the effects of track mis-registration in bit-patterned media. In Proceedings of the IEEE International Conference on Communications (ICC), Bejing, China, 19–23 May 2008; pp. 2061–2065. [Google Scholar] [CrossRef]
- Wang, Y.; Kumar, B.V.K.V. Improved multitrack detection with hybrid 2-D equalizer and modified viterbi detector. IEEE Trans. Magn. 2017, 53, 1–10. [Google Scholar] [CrossRef]
- Shi, Y.; Nutter, P.W.; Miles, J.J. Performance evaluation of bit patterned media channels with island size variations. IEEE Trans. Commun. 2013, 61, 228–236. [Google Scholar] [CrossRef]
- Cheng, T.; Belzer, B.J.; Sivakumar, K. Row-column soft-decision feedback algorithm for two-dimensional intersymbol interference. IEEE Signal Proc. Lett. 2007, 14, 433–436. [Google Scholar] [CrossRef]
- Zheng, J.; Ma, X.; Guan, Y.L.; Cai, K.; Chan, K.S. Low-complexity iterative row-column soft decision feedback algorithm for 2-d inter-symbol interference channel detection with gaussian approximation. IEEE Trans. Magn. 2013, 49, 4768–4773. [Google Scholar] [CrossRef]
- Jeong, S.; Kim, J.; Lee, J. Performance of bit-patterned media recording according to island patterns. IEEE Trans. Magn. 2018, 54, 1–4. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Lee, J. Twin iterative detection for bit-patterned media recording systems. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Nabavi, S.; Kumar, B.V.K.V.; Bain, J.A. Two-dimensional pulse response and media noise modeling for bit-patterned media. IEEE Trans. Magn. 2008, 44, 3789–3792. [Google Scholar] [CrossRef]
- Nabavi, S.; Kumar, B.V.K.V. Two-dimensional generalized partial response equalizer for bit-patterned media. In Proceedings of the IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007; pp. 6249–6254. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. One-dimensional serial detection using new two-dimensional partial response target modeling for bit-patterned media recording. IEEE Magn. Lett. 2020, 11, 1–5. [Google Scholar] [CrossRef]
- Nabavi, S.; Kumar, B.V.K.V.; Bain, J.A.; Hogg, C.; Majetich, S.A. Application of image processing to characterize patterning noise in self-assembled nano-masks for bit-patterned media. IEEE Trans. Magn. 2009, 45, 3523–3526. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | r | p | −1 + 2r + p |
|---|---|---|---|
| 8 dB | 0.2130 | 0 | −0.5740 |
| 9 dB | 0.2248 | 0 | −0.5504 |
| 10 dB | 0.2363 | 0 | −0.5274 |
| 11 dB | 0.2471 | 0 | −0.5058 |
| 12 dB | 0.2565 | 0 | −0.4870 |
| 13 dB | 0.2642 | 0 | −0.4716 |
| 14 dB | 0.2698 | 0 | −0.4604 |
| 15 dB | 0.2730 | 0 | −0.4540 |
| 16 dB | 0.2735 | 0 | −0.4530 |
| 17 dB | 0.2713 | 0 | −0.4574 |
| 18 dB | 0.2663 | 0 | −0.4674 |
| 19 dB | 0.2585 | 0 | −0.4830 |
| 20 dB | 0.2481 | 0 | −0.5038 |
| 21 dB | 0.2353 | 0 | −0.5294 |
| 22 dB | 0.2206 | 0 | −0.5588 |
| 23 dB | 0.2043 | 0 | −0.5914 |
| SNR | r | p | −1 + 2r + p |
|---|---|---|---|
| 8 dB | 0.1769 | 0.5275 | −0.1187 |
| 9 dB | 0.1786 | 0.5458 | −0.0970 |
| 10 dB | 0.1799 | 0.5613 | −0.0789 |
| 11 dB | 0.1809 | 0.5741 | −0.0641 |
| 12 dB | 0.1813 | 0.5844 | −0.0530 |
| 13 dB | 0.1812 | 0.5922 | −0.0454 |
| 14 dB | 0.1805 | 0.5977 | −0.0413 |
| 15 dB | 0.1791 | 0.6010 | −0.0408 |
| 16 dB | 0.1768 | 0.6025 | −0.0439 |
| 17 dB | 0.1736 | 0.6023 | −0.0505 |
| 18 dB | 0.1694 | 0.6007 | −0.0605 |
| 19 dB | 0.1641 | 0.5978 | −0.0740 |
| 20 dB | 0.1577 | 0.5941 | −0.0905 |
| 21 dB | 0.1502 | 0.5896 | −0.1100 |
| 22 dB | 0.1417 | 0.5847 | −0.1319 |
| 23 dB | 0.1325 | 0.5795 | −0.1555 |
| SNR | r | p | −1 + 2r + p |
|---|---|---|---|
| 8 dB | 0.1533 | 0.8725 | 0.1791 |
| 9 dB | 0.1498 | 0.8867 | 0.1863 |
| 10 dB | 0.1462 | 0.8972 | 0.1896 |
| 11 dB | 0.1428 | 0.9044 | 0.1900 |
| 12 dB | 0.1396 | 0.9085 | 0.1877 |
| 13 dB | 0.1367 | 0.9099 | 0.1833 |
| 14 dB | 0.1340 | 0.9089 | 0.1769 |
| 15 dB | 0.1315 | 0.9058 | 0.1688 |
| 16 dB | 0.1289 | 0.9010 | 0.1588 |
| 17 dB | 0.1262 | 0.8946 | 0.1470 |
| 18 dB | 0.1232 | 0.8871 | 0.1335 |
| 19 dB | 0.1198 | 0.8787 | 0.1183 |
| 20 dB | 0.1158 | 0.8697 | 0.1013 |
| 21 dB | 0.1111 | 0.8604 | 0.0826 |
| 22 dB | 0.1058 | 0.8511 | 0.0627 |
| 23 dB | 0.0999 | 0.8420 | 0.0418 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.A.; Lee, J. Modified Viterbi Algorithm with Feedback Using a Two-Dimensional 3-Way Generalized Partial Response Target for Bit-Patterned Media Recording Systems. Appl. Sci. 2021, 11, 728. https://doi.org/10.3390/app11020728
Nguyen TA, Lee J. Modified Viterbi Algorithm with Feedback Using a Two-Dimensional 3-Way Generalized Partial Response Target for Bit-Patterned Media Recording Systems. Applied Sciences. 2021; 11(2):728. https://doi.org/10.3390/app11020728
Chicago/Turabian StyleNguyen, Thien An, and Jaejin Lee. 2021. "Modified Viterbi Algorithm with Feedback Using a Two-Dimensional 3-Way Generalized Partial Response Target for Bit-Patterned Media Recording Systems" Applied Sciences 11, no. 2: 728. https://doi.org/10.3390/app11020728
APA StyleNguyen, T. A., & Lee, J. (2021). Modified Viterbi Algorithm with Feedback Using a Two-Dimensional 3-Way Generalized Partial Response Target for Bit-Patterned Media Recording Systems. Applied Sciences, 11(2), 728. https://doi.org/10.3390/app11020728