Effects of Stratification on Soil–Foundation–Structure Interaction: Centrifugal Observation and Numerical Simulation



Abstract
1. Introduction
2. Model Preparation and Testing Procedure
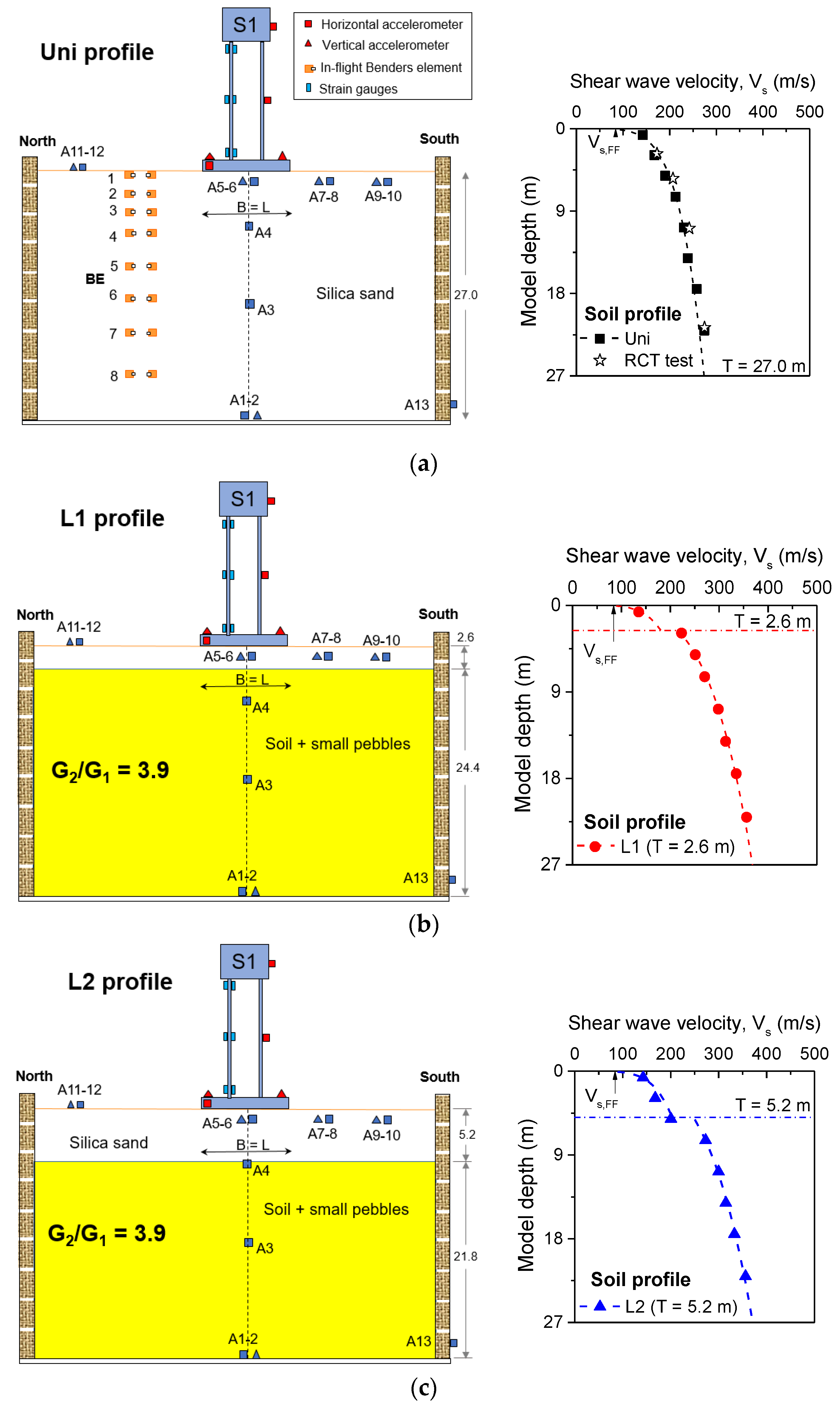
2.1. Soil Models
2.2. Structural Models
2.3. Sensor Arrangements
2.4. Input Motion and Studying Program
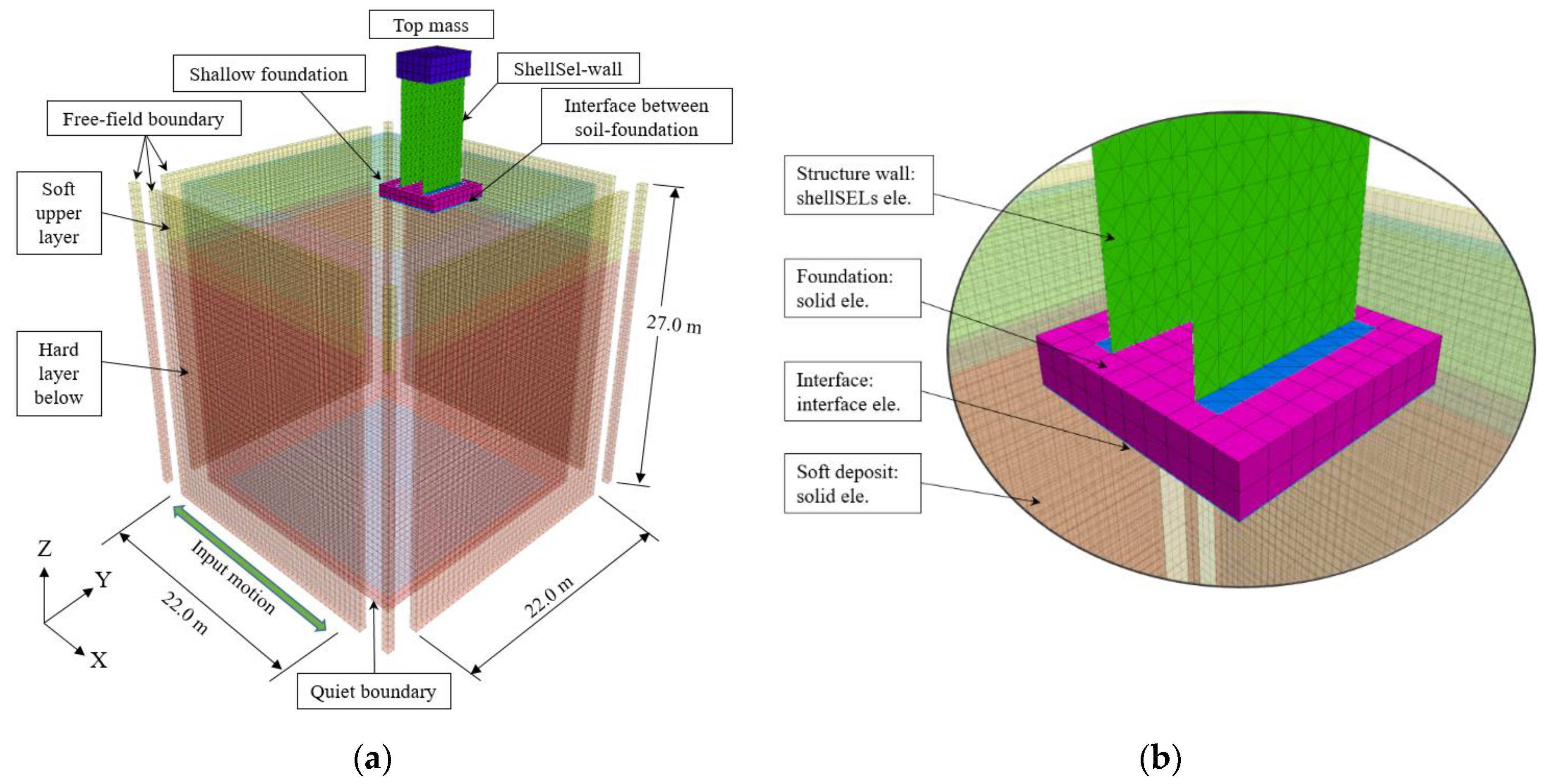
3. Numerical Simulation
3.1. Numerical Model Properties
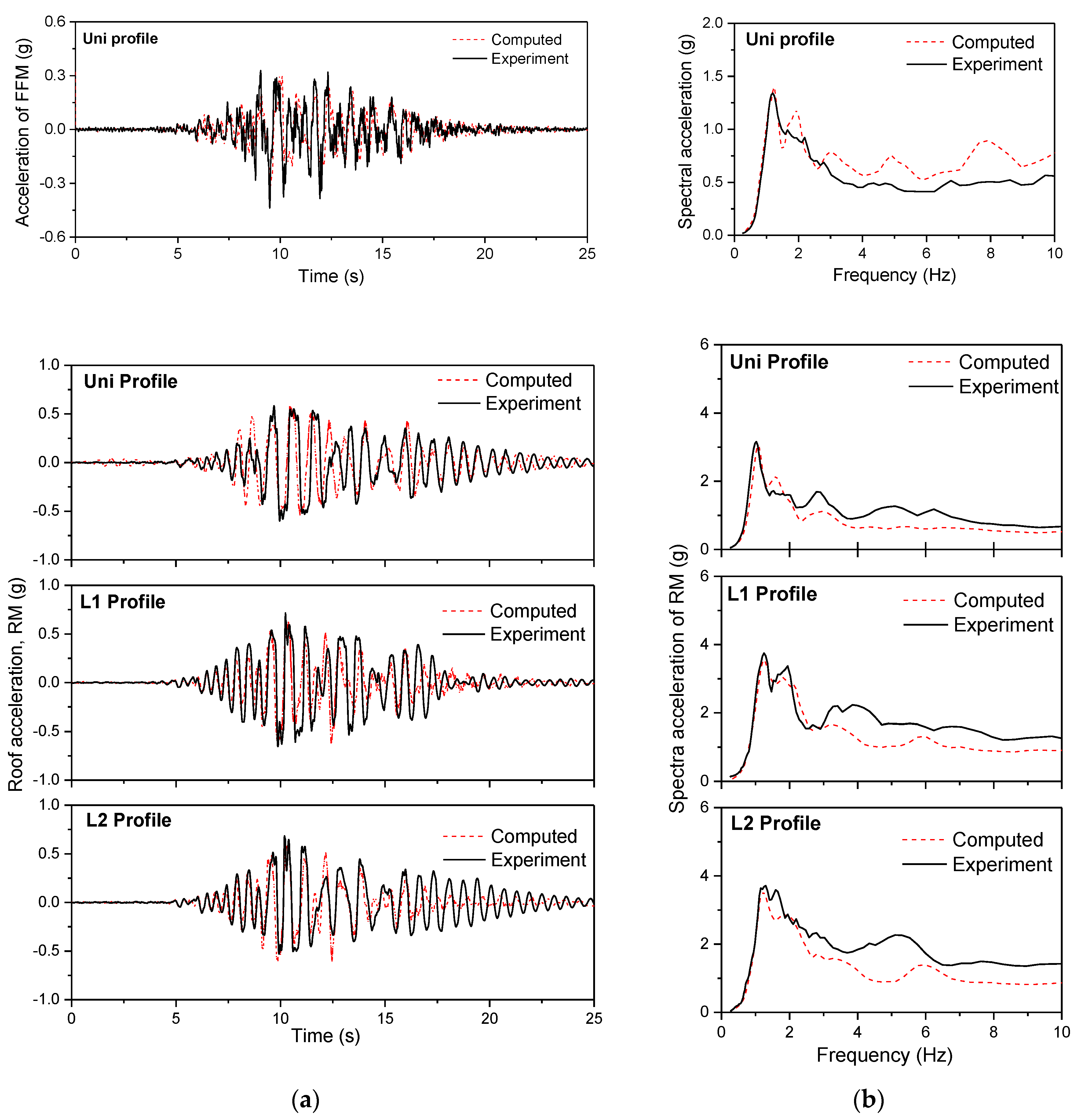
3.2. Model Verification
4. Results and Discussion
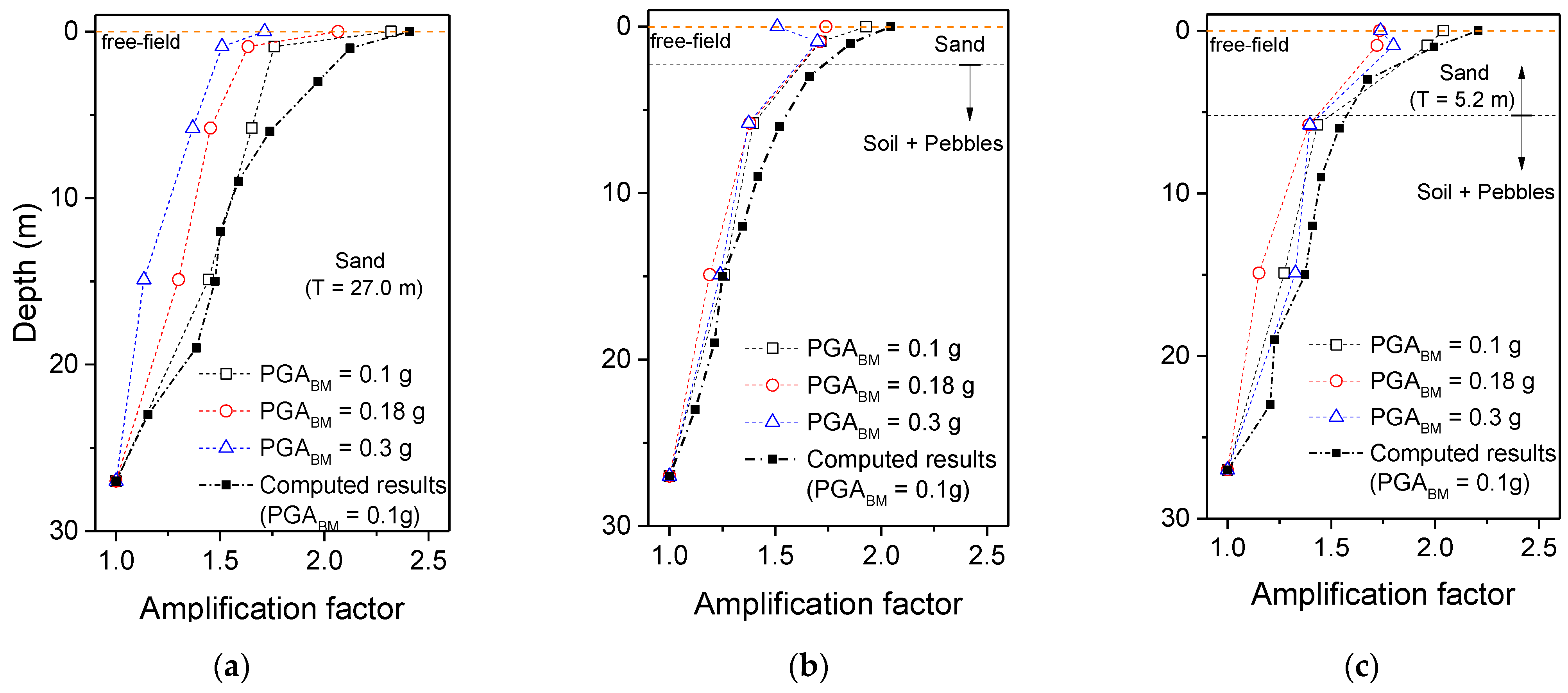
4.1. Soil Amplification
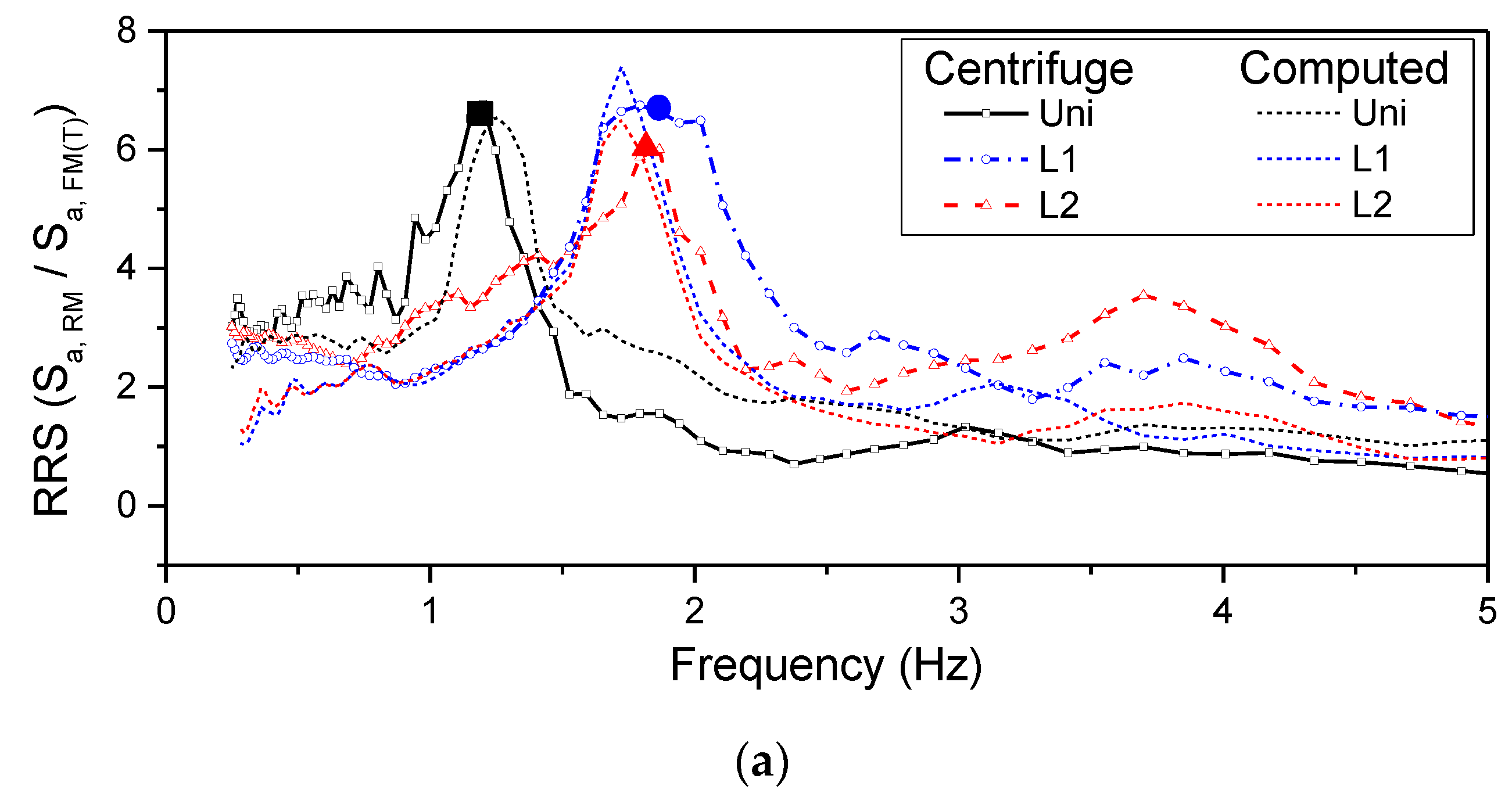
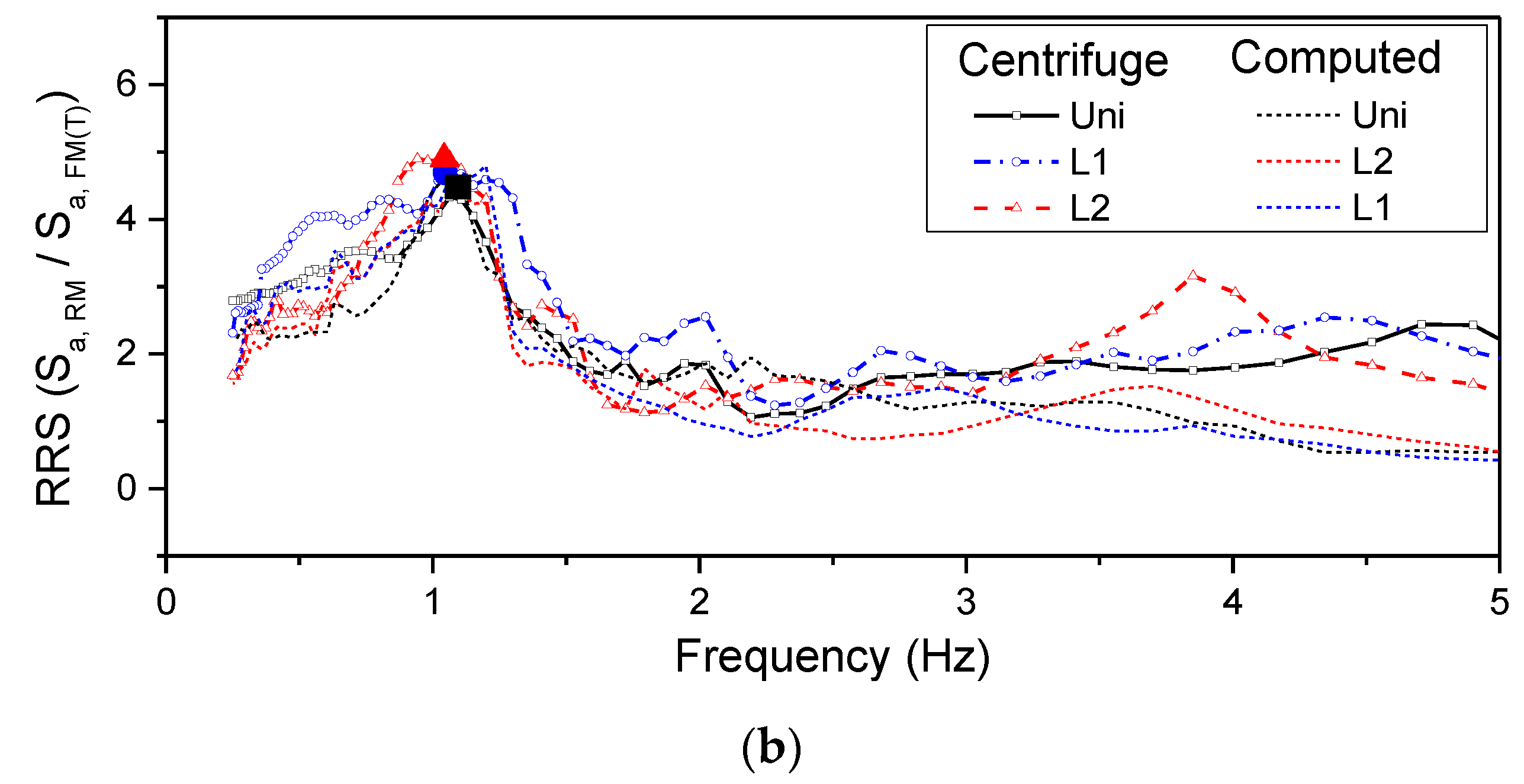
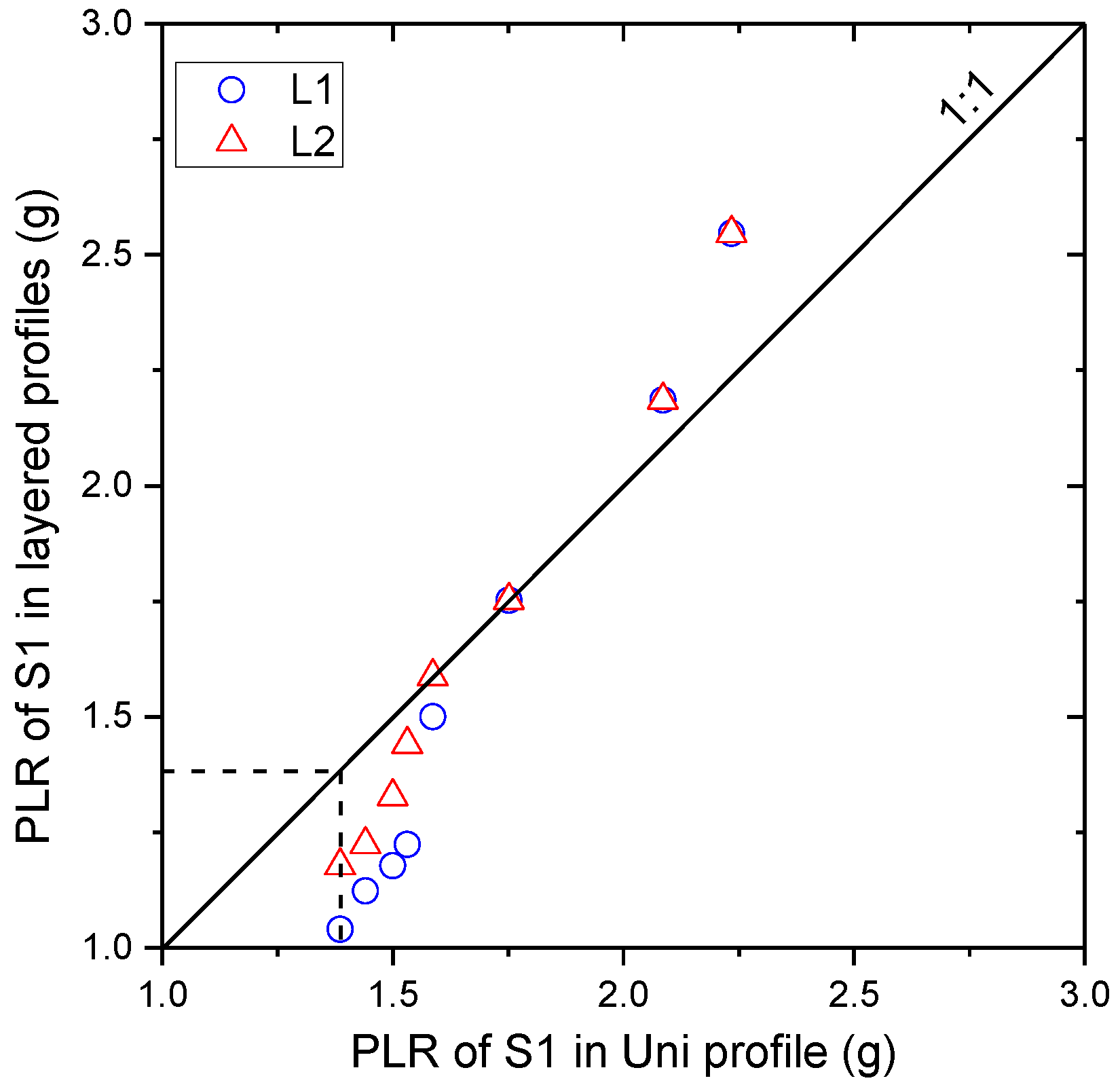
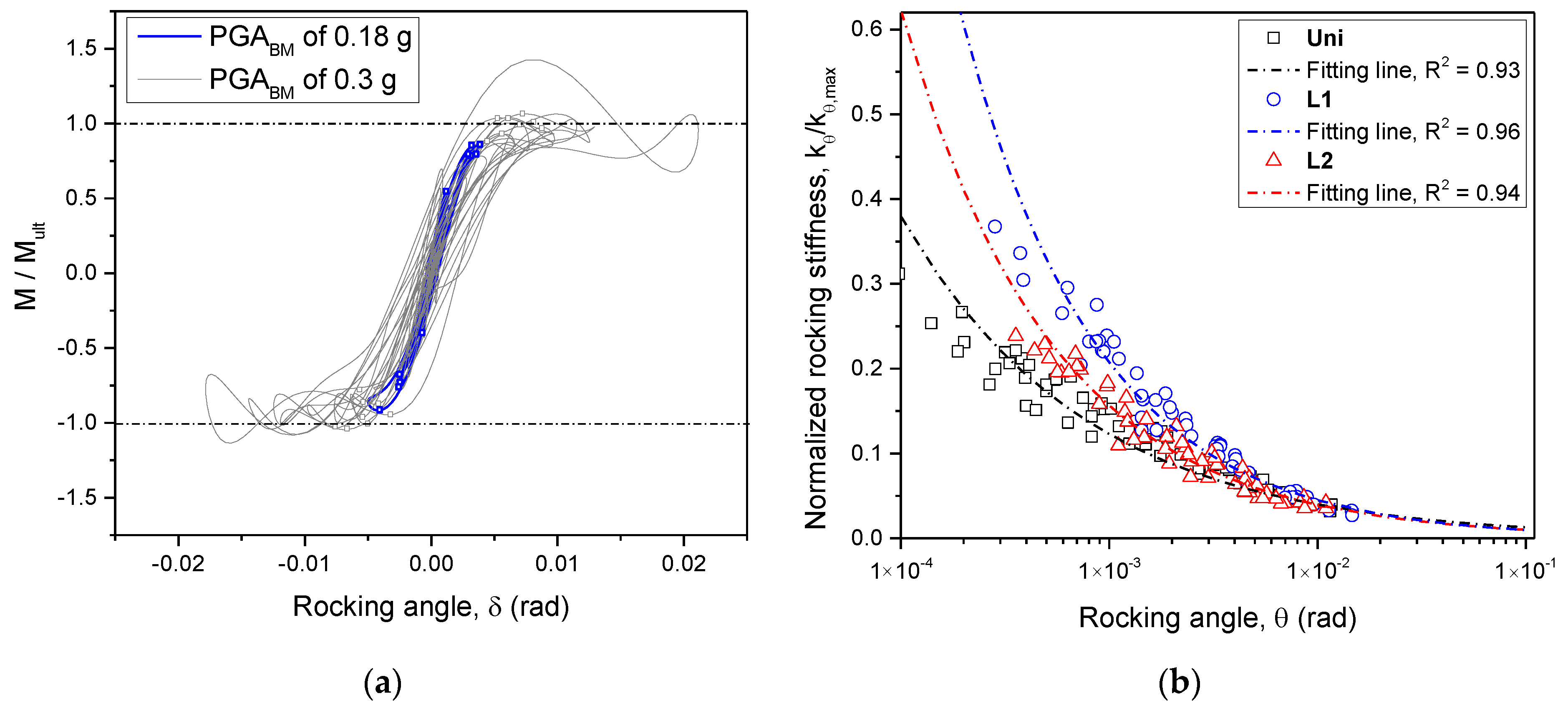
4.2. Inertial Interaction, Flexible-Base Frequency, and Rocking Effects
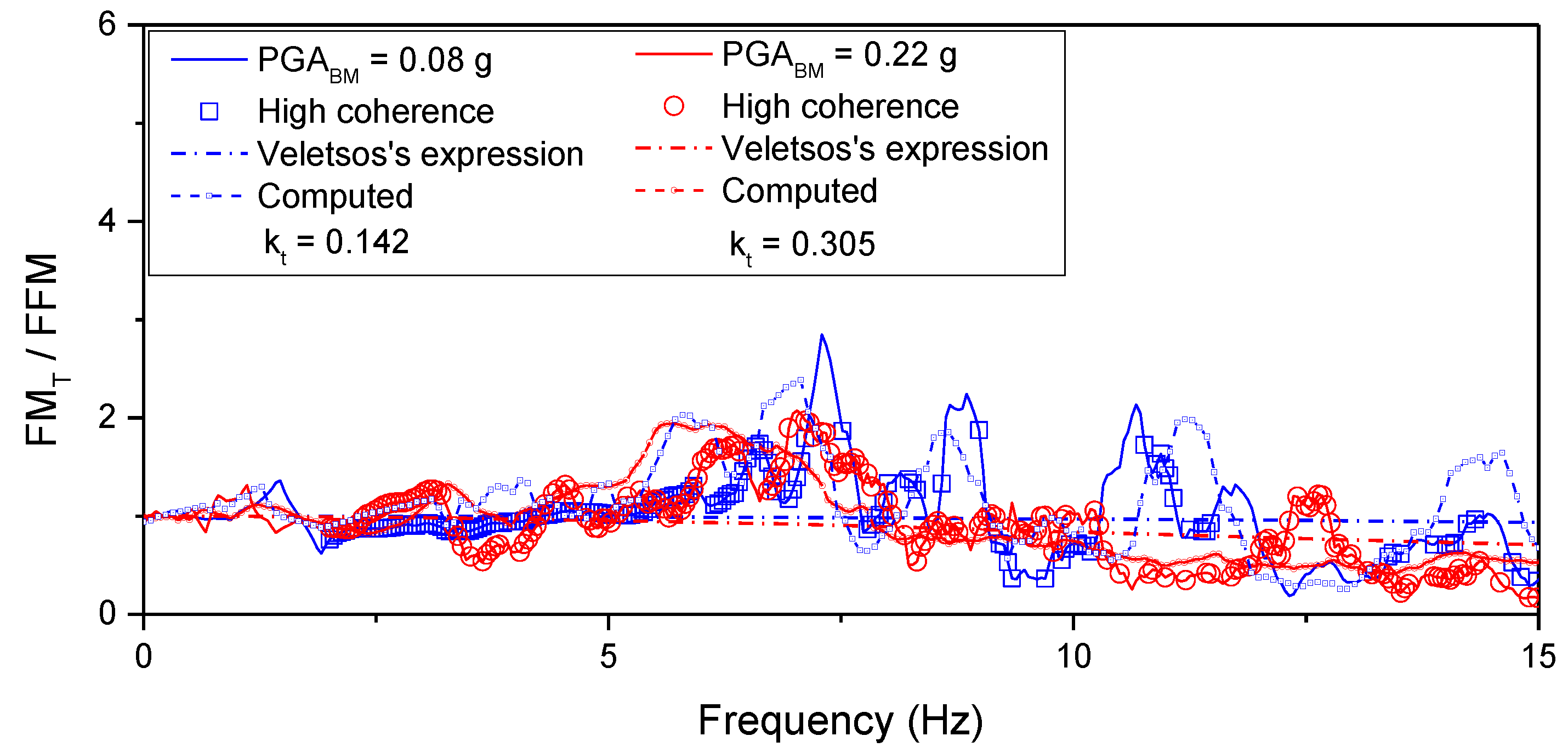
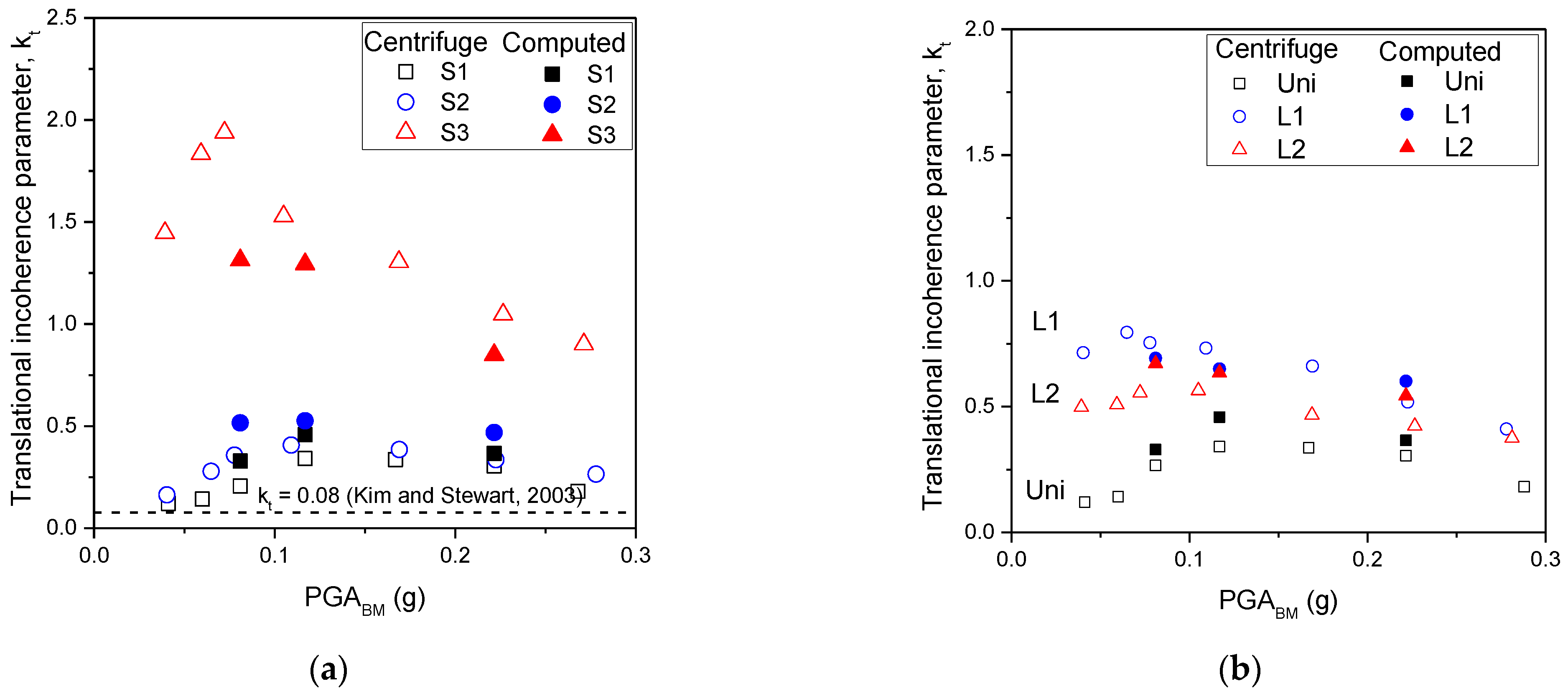
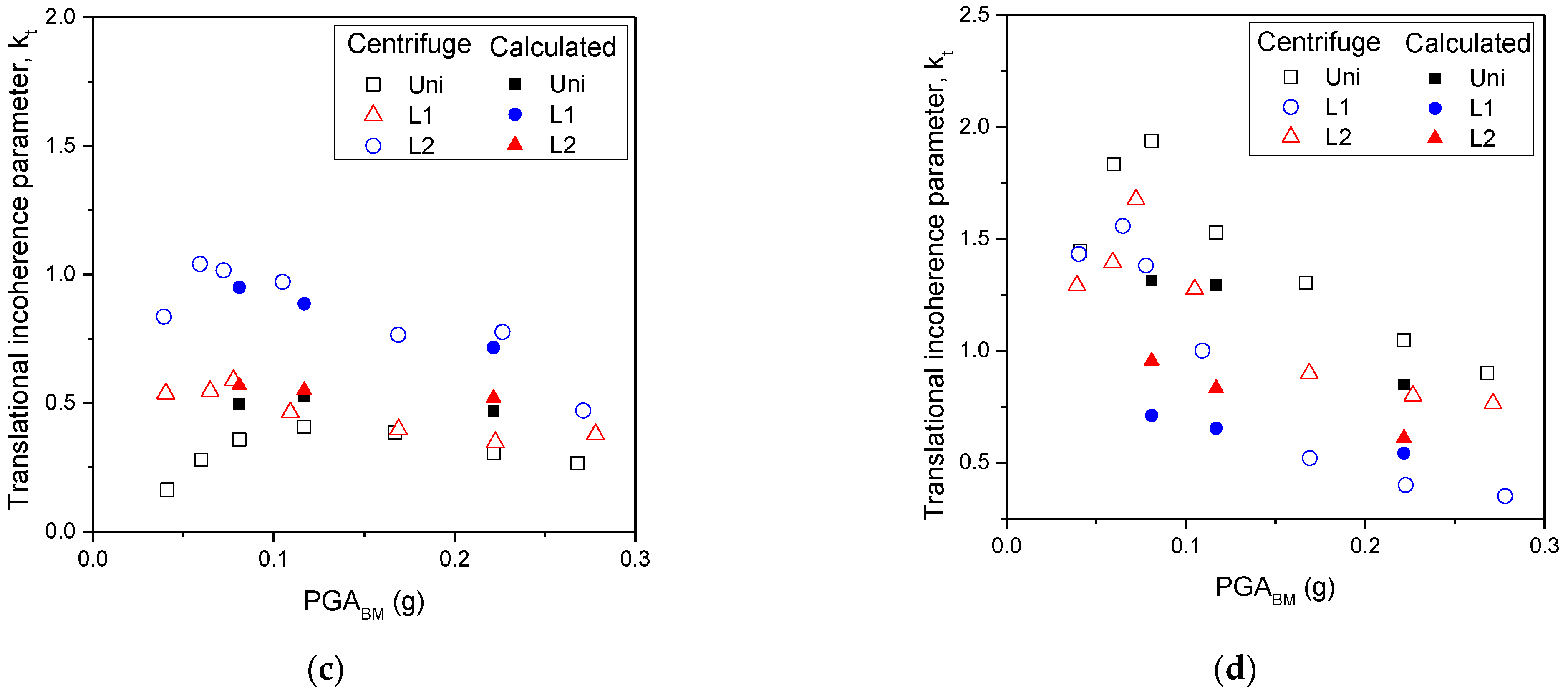
4.3. Kinematic Interaction and Incoherence Parameter
4.4. Structure Responses
4.5. Effects of Stratification on SFSI with Various Structures
5. Conclusions
- Soil response was amplified less at higher input intensity because the soil’s damping significantly increased with increasing strain level. As the thickness of the soft, upper layer (T) decreased, PGAFFM reduced due to the reduced amplification from the layered profiles. For layered ground, the motion of the soil beneath the structure was highly amplified both horizontally and vertically due to feedback from the structure, reflected waves from the interface, and the reduction in stiffness of soil in the soft, upper layer. The motion of the soil beneath the structure became more amplified when T decreased, which indicates that the layered effects had become more significant.
- For earthquakes with low intensity, the flexible-base frequency (fflex) of the structure increased for layered soil profiles, while the period lengthening ratio (PLR) decreased. The increase in rocking stiffness was also observed for the S1 structure. However, at higher input intensity, fflex of the S1 structure on layered soils sharply decreased to that observed on uniform soil due to a reduction in stiffness of the soft, upper layer. This reduction in soil stiffness resulted in a reduction in rocking stiffness on the layered profiles compared to on the uniform profile at a large rocking angle.
- Compared to the uniform profile, the kinematic interaction of the S1 structure on the layered profiles was more severe, which was indicated by a higher translational (kt) incoherence parameter. The kt parameter was experimentally and numerically found to increase with a decrease in T due to the inclination of wave path in the layered profiles.
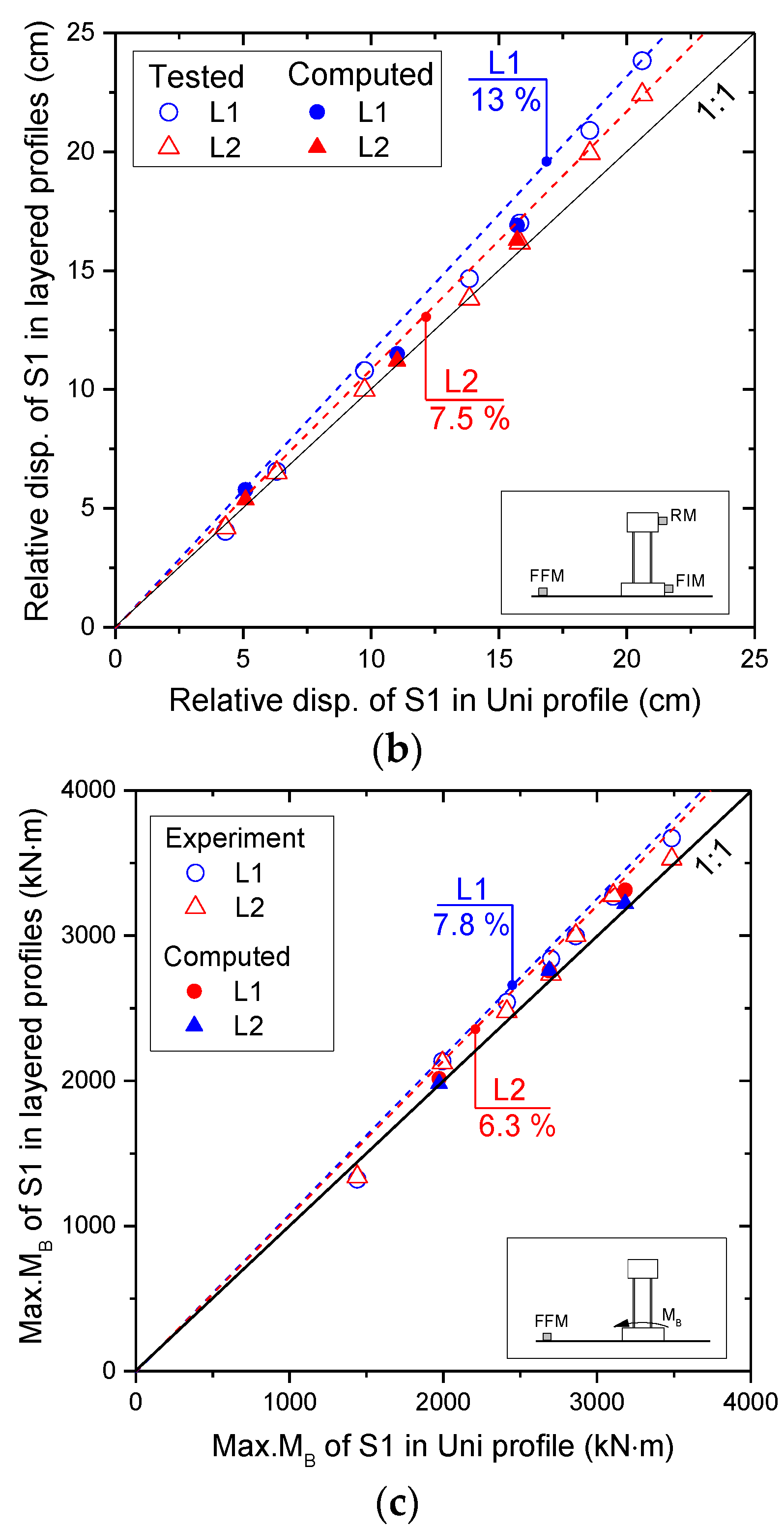
- The structures placed on the layered profiles also experienced higher peak acceleration for roof motion (PGARM), relative displacement, and bending moment compared to structures located on uniform ground. The observed relative displacement, rocking angle, and bending moment increased as T decreased, especially for relatively small values of T.
- The increase in the response of structures on layered soil was more significant for the structures that have a fixed-base frequency close to the site-fundamental frequency. These layered effects increased with a decrease in the thickness of the soft, upper layer. The layered effects were diminished for structure with the smallest foundation width (i.e., S3). The translational incoherence parameter decreased on the layered profiles for the S3 structure, the opposite to what was observed for the S1 and S2 structures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stewart, J.P.; Gregory, L.F.; Raymond, B.S. Seismic Soil-Structure Interaction in Buildings. I: Analytical Methods. J. Geotech. Geoenviron. Eng. 1999, 125, 26–37. [Google Scholar] [CrossRef]
- Ghayoomi, M.; Dashti, S. Effect of Ground Motion Characteristics on Seismic Soil-Foundation-Structure Interaction. Earthq. Spectra 2015, 31, 1789–1812. [Google Scholar] [CrossRef]
- Mylonakis, G.; Nikolaou, S.; Gazetas, G. Footings under seismic loading: Analysis and design issues with emphasis on bridge foundations. Soil Dyn. Earthq. Eng. 2006, 26, 824–853. [Google Scholar] [CrossRef]
- Stewart, J.P.; Seed, R.B.; Fenves, G.L. Empirical Evaluation of Inertial Soil-Structure Interaction Effects; Pacific Earthquake Engineering Research Center University of California: Berkeley, CA, USA, 1998. [Google Scholar]
- Borghei, A.; Ghayoomi, M. The role of kinematic interaction on measured seismic response of soil-foundation-structure systems. Soil Dyn. Earthq. Eng. 2019, 125, 105674. [Google Scholar] [CrossRef]
- Veletsos, A.S.; Prasad, A.M.; Wu, W.H. Transfer Functions For Rigid Rectangular Foundations. Earthq. Eng. Struct. Dyn. 1997, 26, 5–17. [Google Scholar] [CrossRef]
- Mita, A.; Luco, J. Response of Structures to a Spatially Random Ground Motion. In Proceedings of the 3rd US National Conference on Earthquake Engineering, Charleston, SC, USA, 24–28 August 1986; Earthquake Engineering Research Inst.: San Francisco, CA, USA, 1986. [Google Scholar]
- Kim, S.; Stewart, J.P. Kinematic Soil-Structure Interaction from Strong Motion Recordings. J. Geotech. Geoenviron. Eng. 2003, 129, 323–335. [Google Scholar] [CrossRef]
- Seed, H.B.; Romo, M.P.; Sun, J.I.; Jaime, A.; Lysmer, J. The Mexico Earthquake of September 19, 1985—Relationships between Soil Conditions and Earthquake Ground Motions. Earthq. Spectra 1988, 4, 687–729. [Google Scholar] [CrossRef]
- Kokusho, T.; Aoyagi, T.; Wakunami, A. In Situ Soil-Specific Nonlinear Properties Back-Calculated from Vertical Array Records during 1995 Kobe Earthquake. J. Geotech. Geoenviron. Eng. 2005, 131, 1509–1521. [Google Scholar] [CrossRef]
- Fukushima, Y. Characteristics of Observed Peak Amplitude for Strong Ground Motion from the 1995 Hyogoken Nanbu (Kobe) Earthquake. Bull. Seism. Soc. Am. 2000, 90, 545–565. [Google Scholar] [CrossRef]
- Trifunac, M.D. Site conditions and earthquake ground motion—A review. Soil Dyn. Earthq. Eng. 2016, 90, 88–100. [Google Scholar] [CrossRef]
- Ahmad, S.; Rupani, A. Horizontal impedance of square foundation in layered soil. Soil Dyn. Earthq. Eng. 1999, 18, 59–69. [Google Scholar] [CrossRef]
- Jaya, V.; Dodagoudar, G.R.; Boominathan, A. Seismic soil-structure interaction analysis of tall slender structures. Int. J. Geotech. Eng. 2008, 2, 381–393. [Google Scholar] [CrossRef]
- Liang, J.; Fu, J.; Todorovska, M.; Trifunac, M.D. Effects of the site dynamic characteristics on soil–structure interaction (I): Incident SH-Waves. Soil Dyn. Earthq. Eng. 2013, 44, 27–37. [Google Scholar] [CrossRef]
- Liang, J.; Fu, J.; Todorovska, M.; Trifunac, M.D. Effects of site dynamic characteristics on soil–structure interaction (II): Incident P and SV waves. Soil Dyn. Earthq. Eng. 2013, 51, 58–76. [Google Scholar] [CrossRef]
- Rayhani, M.H.T.; El Naggar, M.H. Centrifuge modeling of seismic response of layered soft clay. Bull. Earthq. Eng. 2007, 5, 571–589. [Google Scholar] [CrossRef]
- Schofield, A.N. Cambridge Geotechnical Centrifuge Operations. Géotechnique 1980, 30, 227–268. [Google Scholar] [CrossRef]
- Ha, J.-G.; Lee, S.-H.; Kim, N.-S.; Choo, Y.W. Simulation of soil–foundation–structure interaction of Hualien large-scale seismic test using dynamic centrifuge test. Soil Dyn. Earthq. Eng. 2014, 61, 176–187. [Google Scholar] [CrossRef]
- Lee, S.-H.; Choo, Y.-W.; Kim, D.-S. Performance of an equivalent shear beam (ESB) model container for dynamic geotechnical centrifuge tests. Soil Dyn. Earthq. Eng. 2013, 44, 102–114. [Google Scholar] [CrossRef]
- Lanzano, G.; Bilotta, E.; Russo, G.; Silvestri, F.; Madabhushi, S.P.G. Centrifuge Modeling of Seismic Loading on Tunnels in Sand. Geotech. Test. J. 2012, 35, 854–869. [Google Scholar] [CrossRef]
- Lanzano, G.; Bilotta, E.; Russo, G.; Silvestri, F. Experimental and numerical study on circular tunnels under seismic loading. Eur. J. Environ. Civ. Eng. 2014, 19, 539–563. [Google Scholar] [CrossRef]
- Trombetta, N.; Mason, H.; Chen, Z.; Hutchinson, T.; Bray, J.; Kutter, B. Nonlinear dynamic foundation and frame structure response observed in geotechnical centrifuge experiments. Soil Dyn. Earthq. Eng. 2013, 50, 117–133. [Google Scholar] [CrossRef]
- Ngo, V.-L.; Kim, J.-M.; Lee, C. Influence of structure-soil-structure interaction on foundation behavior for two adjacent structures: Geo-centrifuge experiment. Geomech. Eng. 2019, 19, 407–420. [Google Scholar]
- Rayhani, M.H.; El Naggar, M.H. Numerical Modeling of Seismic Response of Rigid Foundation on Soft Soil. Int. J. Géoméch. 2008, 8, 336–346. [Google Scholar] [CrossRef]
- Xu, R.; Fatahi, B. Novel application of geosynthetics to reduce residual drifts of mid-rise buildings after earthquakes. Soil Dyn. Earthq. Eng. 2019, 116, 331–344. [Google Scholar] [CrossRef]
- Rayhani, M.; El Naggar, M.H. Physical and Numerical Modeling of Seismic Soil-Structure Interaction in Layered Soils. Geotech. Geol. Eng. 2011, 30, 331–342. [Google Scholar] [CrossRef]
- Itasca, F.D. Fast Lagrangian Analysis of Continua in 3 Dimensions. In User Manual, Version 5.0; Itasca Consulting Group: Minneapolis, MN, USA, 2012. [Google Scholar]
- Comte, C.; Von Stebut, J. Microprobe-type measurement of Young’s modulus and Poisson coefficient by means of depth sensing indentation and acoustic microscopy. Surf. Coat. Technol. 2002, 154, 42–48. [Google Scholar] [CrossRef]
- Bazzurro, P.; Cornell, C.A. Ground-Motion Amplification in Nonlinear Soil Sites with Uncertain Properties. Bull. Seismol. Soc. Am. 2005, 95, 2027. [Google Scholar] [CrossRef][Green Version]
- Alterio, L.; Russo, G.; Silvestri, F. Seismic Vulnerability Reduction for Historical Buildings with Non-Invasive Subsoil Treatments: The Case Study of the Mosaics Palace at Herculaneum. Int. J. Arch. Heritage 2017, 11, 1–17. [Google Scholar] [CrossRef][Green Version]
- Apsel, R.J.; Luco, J.E. Impedance functions for foundations embedded in a layered medium: An integral equation approach. Earthq. Eng. Struct. Dyn. 1987, 15, 213–231. [Google Scholar] [CrossRef]
- Ko, K.-W.; Ha, J.-G.; Park, H.-J.; Kim, D.-S. Investigation of Period-Lengthening Ratio for Single-Degree-of-Freedom Structures Using Dynamic Centrifuge Test. J. Earthq. Eng. 2019, 1–23. [Google Scholar] [CrossRef]
- Gajan, S.; Kutter, B.L.; Phalen, J.D.; Hutchinson, T.C.; Martin, G.R. Centrifuge modeling of load-deformation behavior of rocking shallow foundations. Soil Dyn. Earthq. Eng. 2005, 25, 773–783. [Google Scholar] [CrossRef]
- Gazetas, G.; Anastasopoulos, I.; Adamidis, O.; Kontoroupi, T. Nonlinear rocking stiffness of foundations. Soil Dyn. Earthq. Eng. 2013, 47, 83–91. [Google Scholar] [CrossRef]
- Gajan, S.; Kutter, B.L. Contact Interface Model for Shallow Foundations Subjected to Combined Cyclic Loading. J. Geotech. Geoenviron. Eng. 2009, 135, 407–419. [Google Scholar] [CrossRef]
- Anastasopoulos, I.; Kourkoulis, R.S.; Gelagoti, F.; Papadopoulos, E. Rocking response of SDOF systems on shallow improved sand: An experimental study. Soil Dyn. Earthq. Eng. 2012, 40, 15–33. [Google Scholar] [CrossRef]
- Kim, D.-K.; Lee, S.-H.; Choo, Y.W.; Park, H.-G. Rocking Effect of a Mat Foundation on the Earthquake Response of Structures. J. Geotech. Geoenviron. Eng. 2015, 141, 04014085. [Google Scholar] [CrossRef]
- Gajan, S.; Kutter, B.L. Capacity, Settlement, and Energy Dissipation of Shallow Footings Subjected to Rocking. J. Geotech. Geoenviron. Eng. 2008, 134, 1129–1141. [Google Scholar] [CrossRef]
- Gajan, S.; Kutter, B.L. Effects of Moment-to-Shear Ratio on Combined Cyclic Load-Displacement Behavior of Shallow Foundations from Centrifuge Experiments. J. Geotech. Geoenviron. Eng. 2009, 135, 1044–1055. [Google Scholar] [CrossRef]
- Gazetas, G. Foundation Vibrations. In Foundation Engineering Handbook; Fang, H.-Y., Ed.; Springer US: Boston, MA, USA, 1991; pp. 553–593. [Google Scholar]
- Meyerhof, G.G.; Hanna, A.M. Ultimate bearing capacity of foundations on layered soils under inclined load. Can. Geotech. J. 1978, 15, 565–572. [Google Scholar] [CrossRef]
- ASCE/SEI. Minimum Design Loads and Associated Criteria for Buildings and Other Structures; American Society of Civil Engineers: Reston, VA, USA, 2017. [Google Scholar]
- FEMA. Improvement of Nonlinear Static Seismic Analysis Procedures; FEMA 440; ATC-55 Project; Applied Technology Council: Redwood City, CA, USA, 2005. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structures | S1 | S2 | S3 |
|---|---|---|---|
| Foundations | |||
| Dimension L × B × H (m) | 5.22 × 5.22 × 0.9 | 5.22 × 3.94 × 0.9 | 1.2 × 2.0 × 0.9 |
| rs = (m) | 2.95 | 2.55 | 0.82 |
| Structures | |||
| fn at 1 g (Hz) | 98.6 | 82.0 | 317.4 |
| fn at 45 g (Hz) | 2.19 | 1.82 | 7.05 |
| Structure height, h (m) | 9.4 | 8.25 | 2.97 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ngo, V.-L.; Lee, C.; Kim, J.-M. Effects of Stratification on Soil–Foundation–Structure Interaction: Centrifugal Observation and Numerical Simulation. Appl. Sci. 2021, 11, 623. https://doi.org/10.3390/app11020623
Ngo V-L, Lee C, Kim J-M. Effects of Stratification on Soil–Foundation–Structure Interaction: Centrifugal Observation and Numerical Simulation. Applied Sciences. 2021; 11(2):623. https://doi.org/10.3390/app11020623
Chicago/Turabian StyleNgo, Van-Linh, Changho Lee, and Jae-Min Kim. 2021. "Effects of Stratification on Soil–Foundation–Structure Interaction: Centrifugal Observation and Numerical Simulation" Applied Sciences 11, no. 2: 623. https://doi.org/10.3390/app11020623
APA StyleNgo, V.-L., Lee, C., & Kim, J.-M. (2021). Effects of Stratification on Soil–Foundation–Structure Interaction: Centrifugal Observation and Numerical Simulation. Applied Sciences, 11(2), 623. https://doi.org/10.3390/app11020623