Roll Control of Morphing Aircraft with Synthetic Jet Actuators at a High Angle of Attack

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Featured Application
Abstract
1. Introduction
2. Dynamic Modeling for Morphing Aircraft with SJA
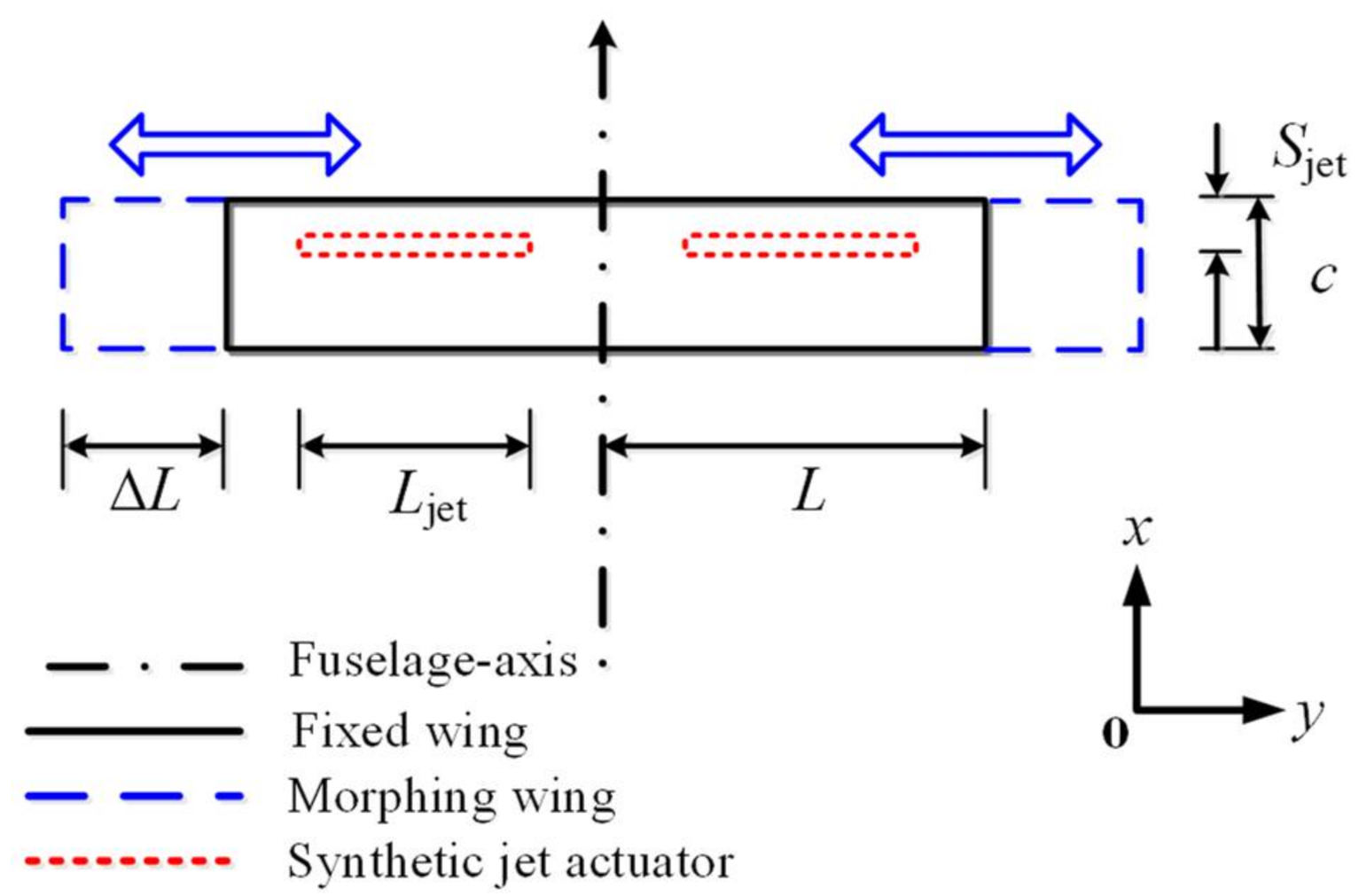
2.1. Description of the Model
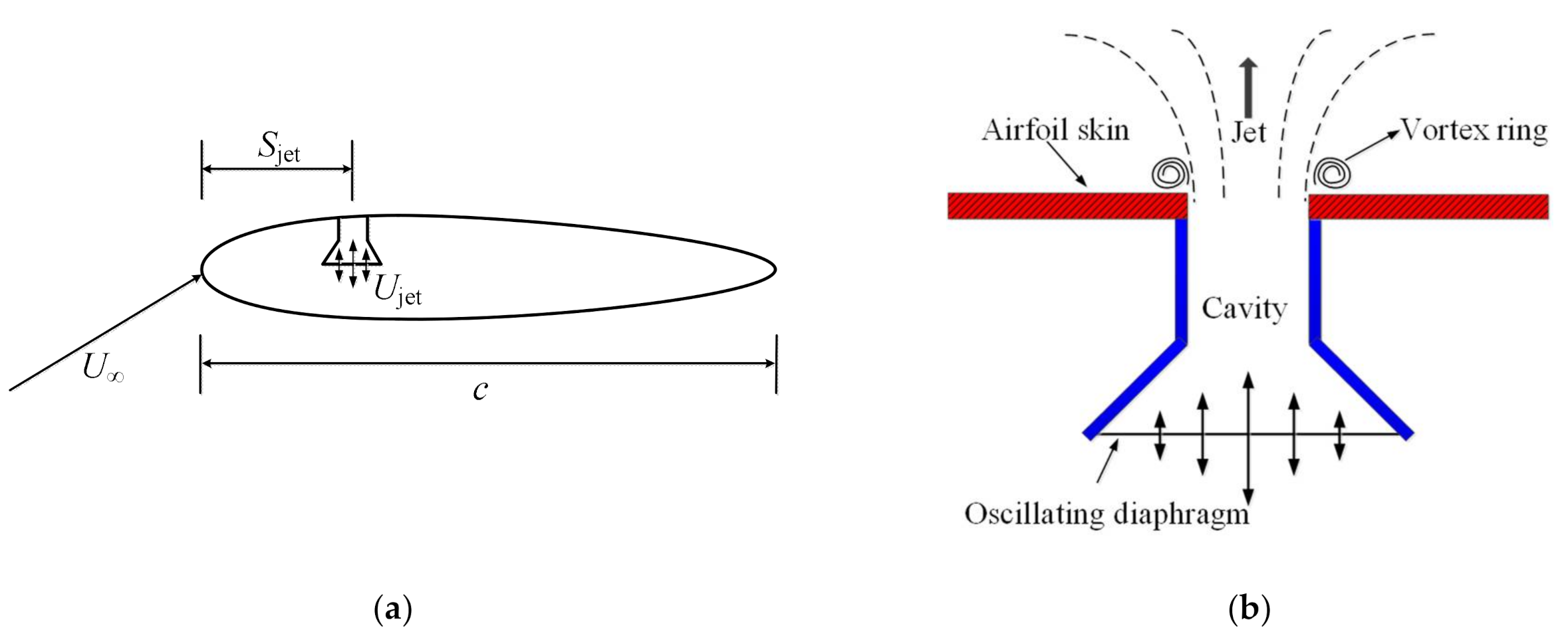
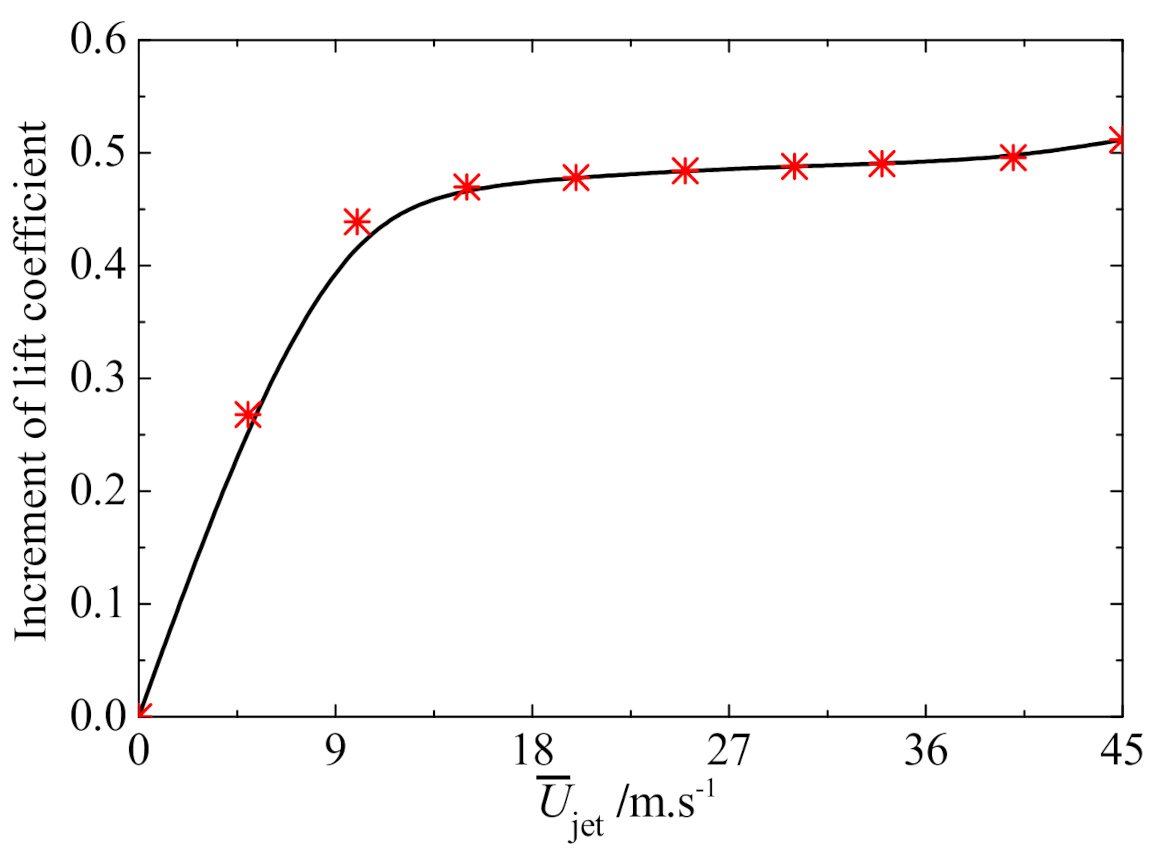
2.2. Modeling for Roll Moment for SJA
2.3. Modeling of Roll Moment Due to the Morphing Motion
2.4. Equations of Motion
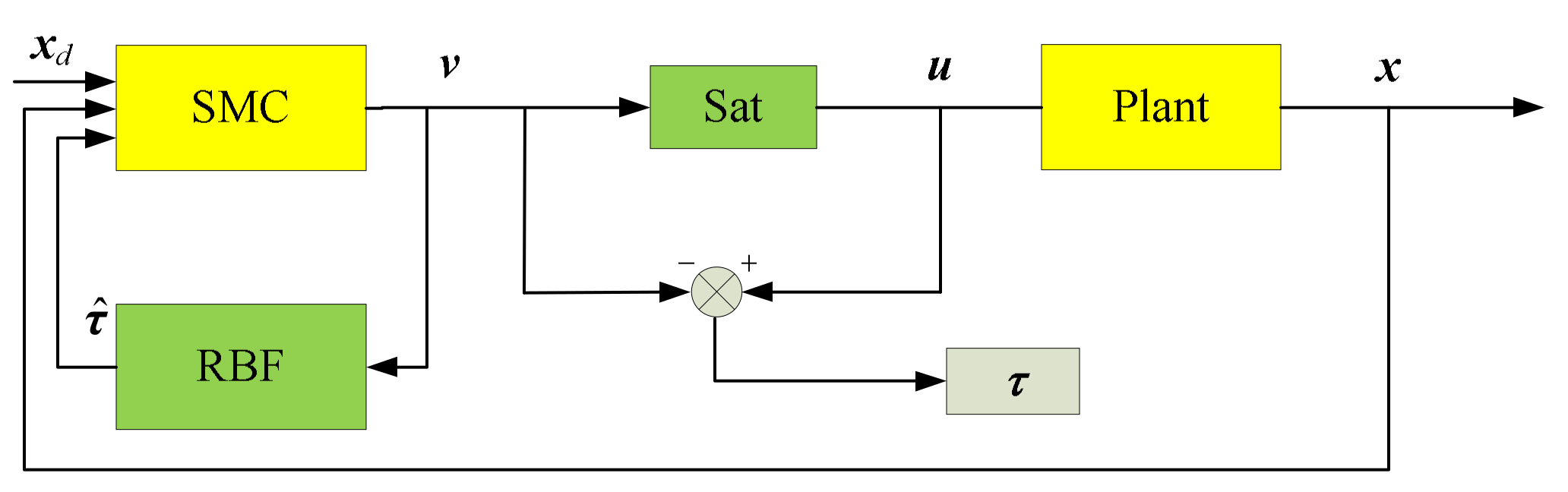
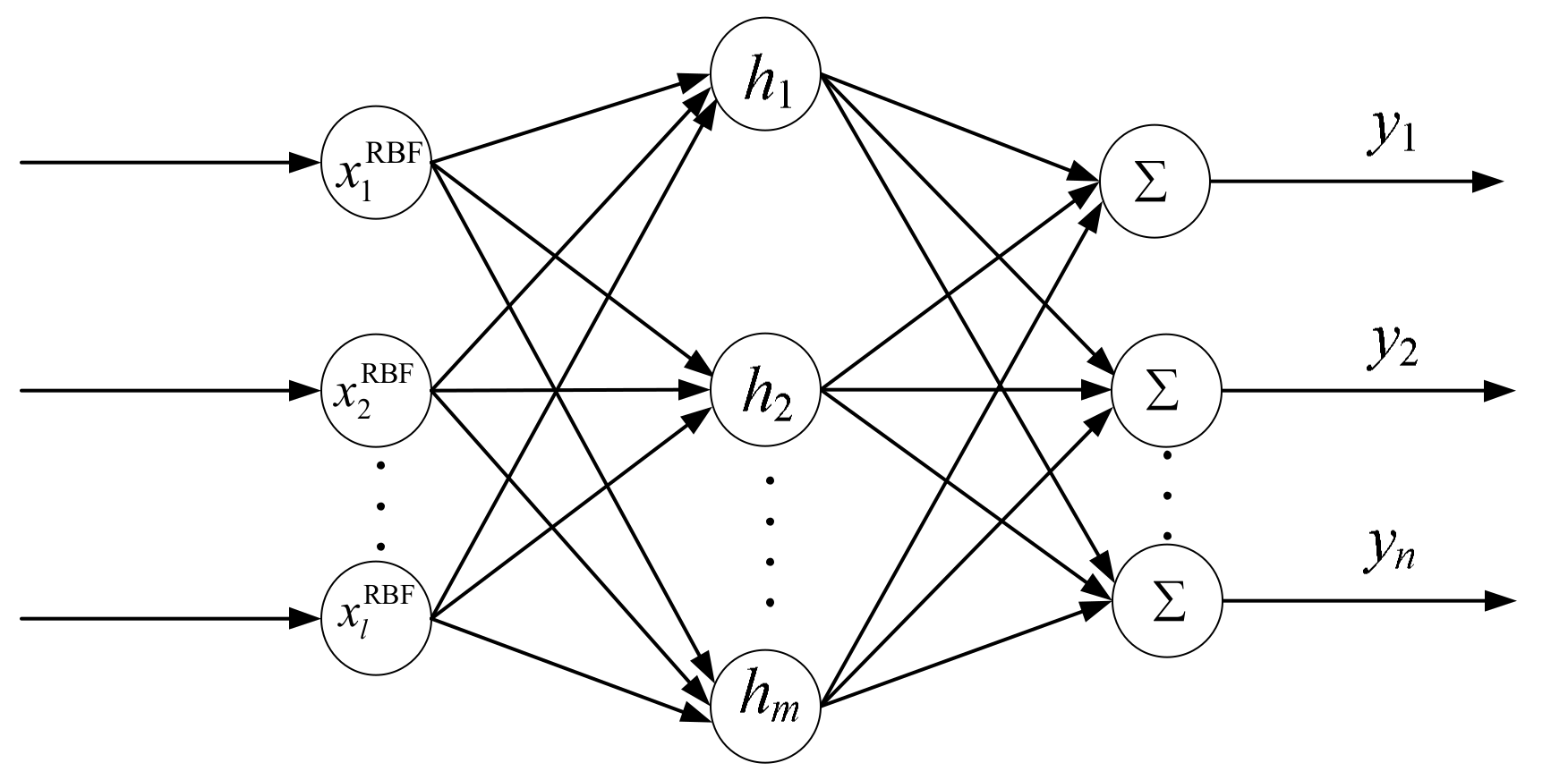
3. Controller Design
4. Simulation Results and Discussion
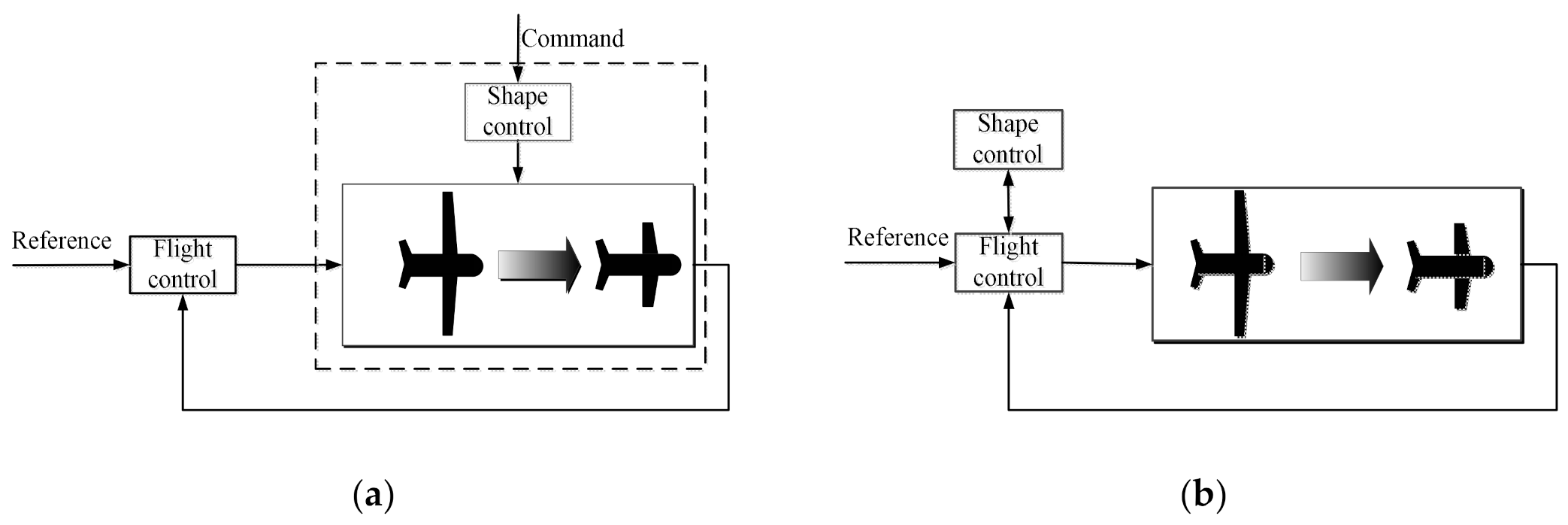
- The first approach is based on a priori estimate of the long-term vehicle performance, and the shape control operates in an open-manner, which is independent of the instantaneous aircraft state, and
- The second approach is the integrated shape and flight control, and considers the morphing part as an additional input. Then, the morphing can be achieved by the feedback controller according to the instantaneous state. This method is available in both short-term and long-term maneuvering, and it is the most similar to the bird-like morphing flight found in nature.
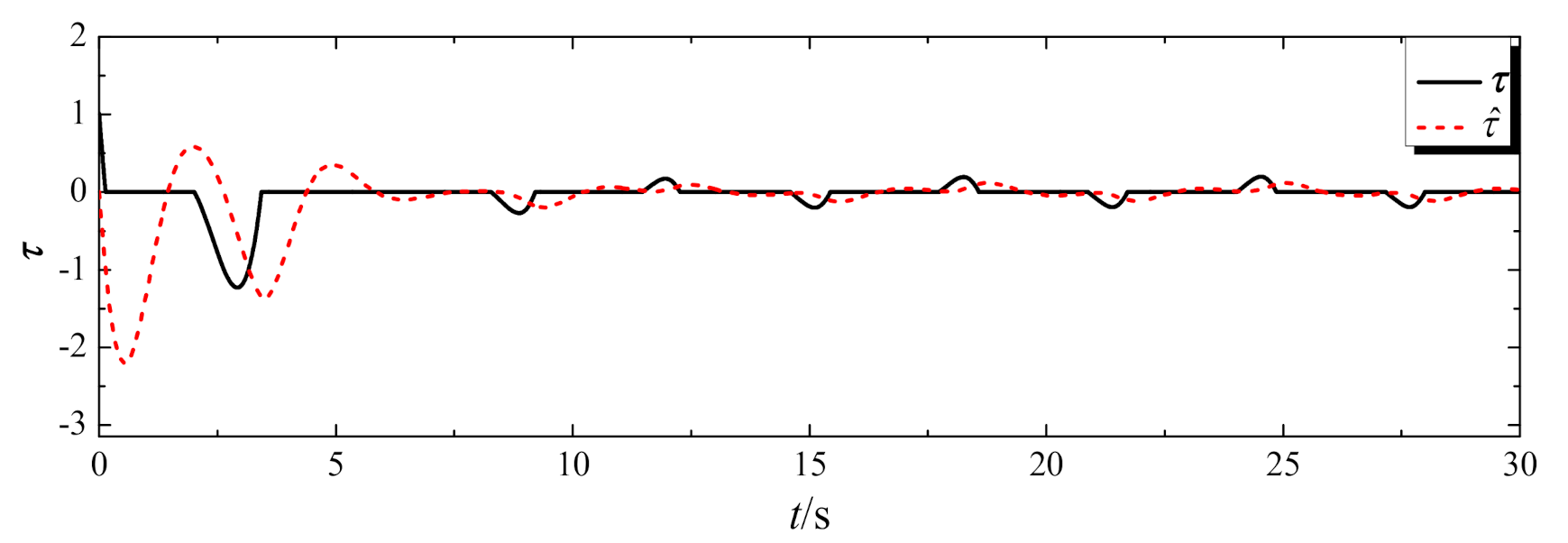
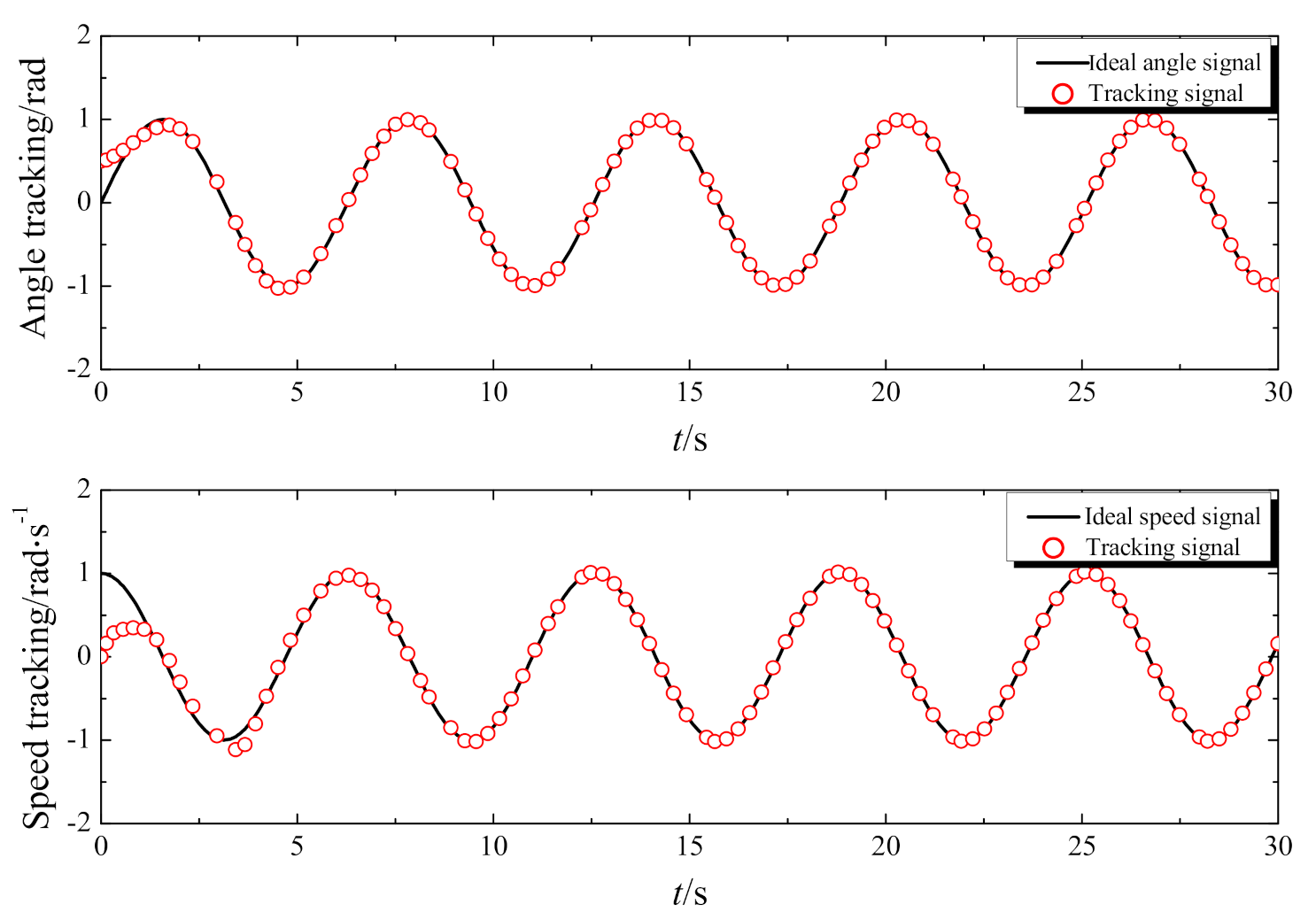
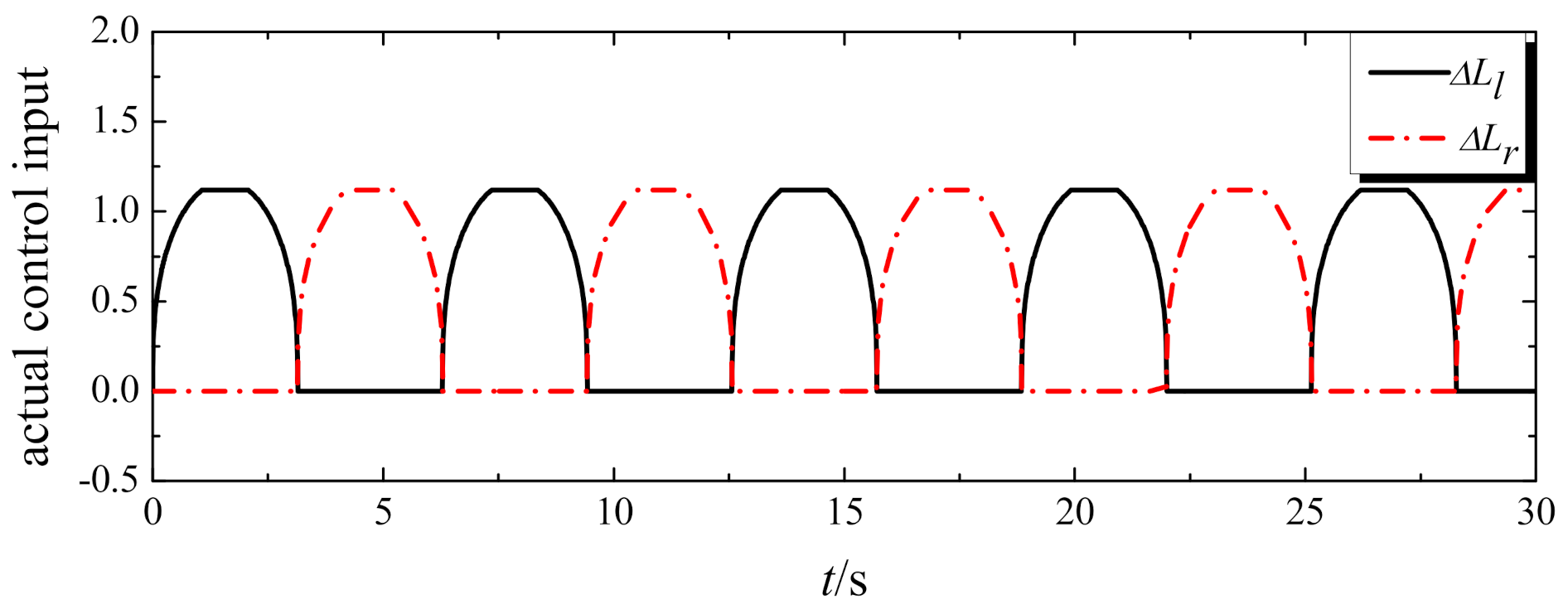
4.1. Roll Controlled by the Morphing Span
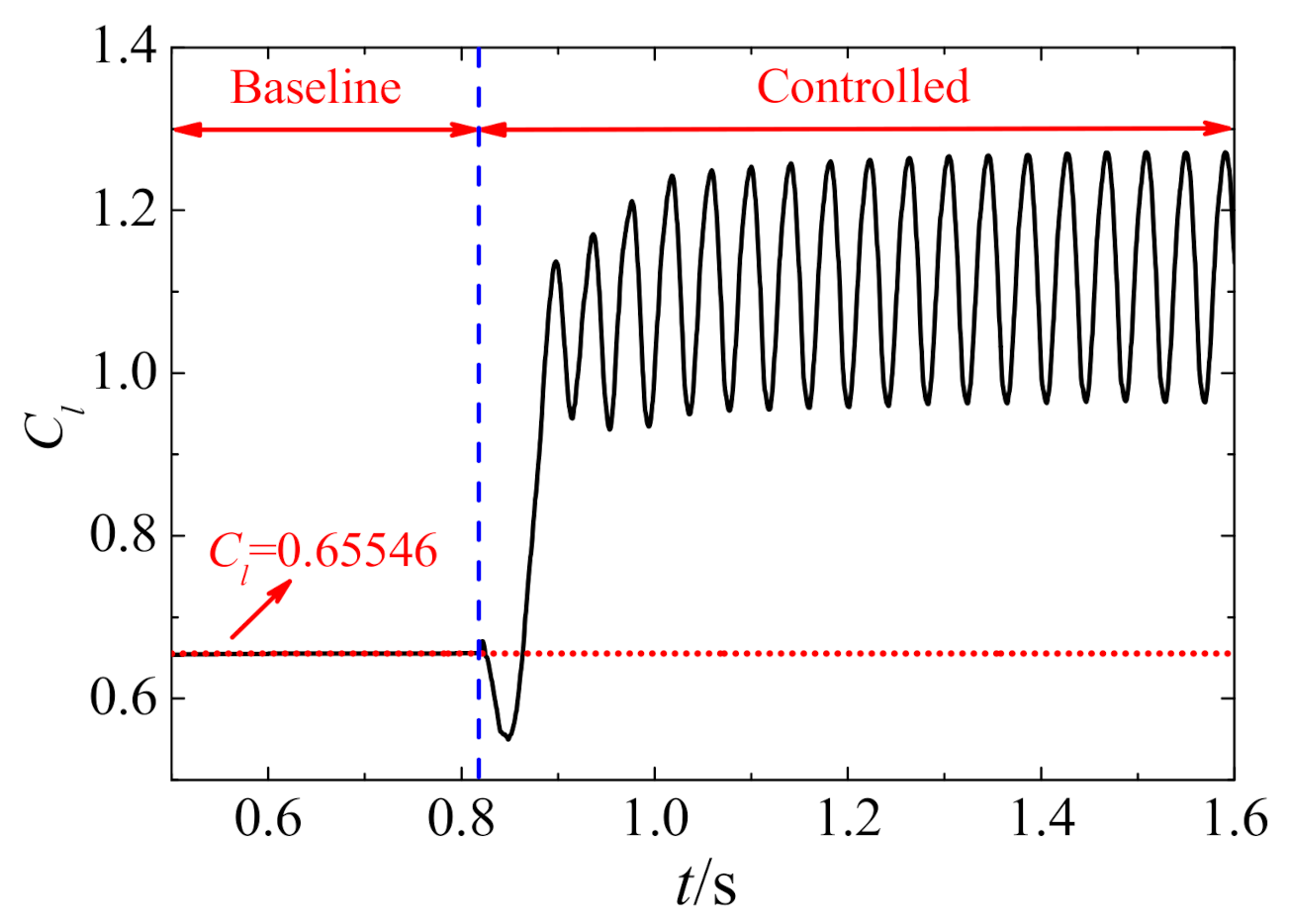
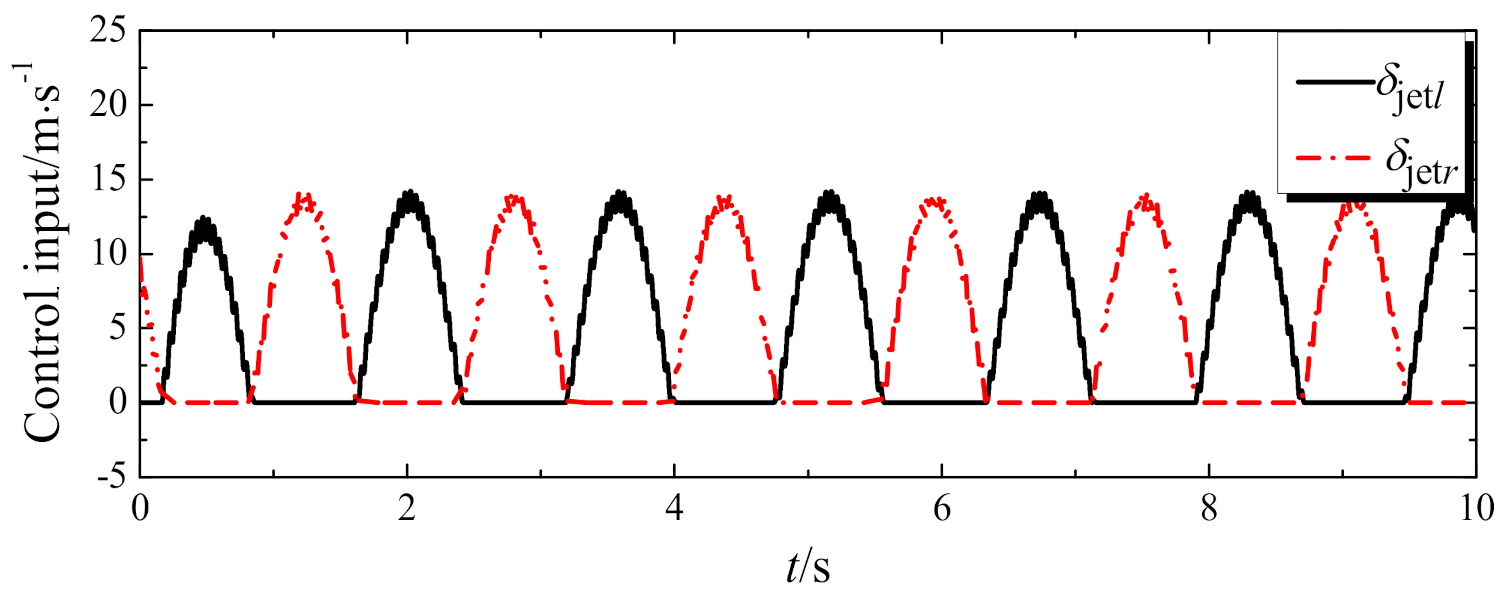
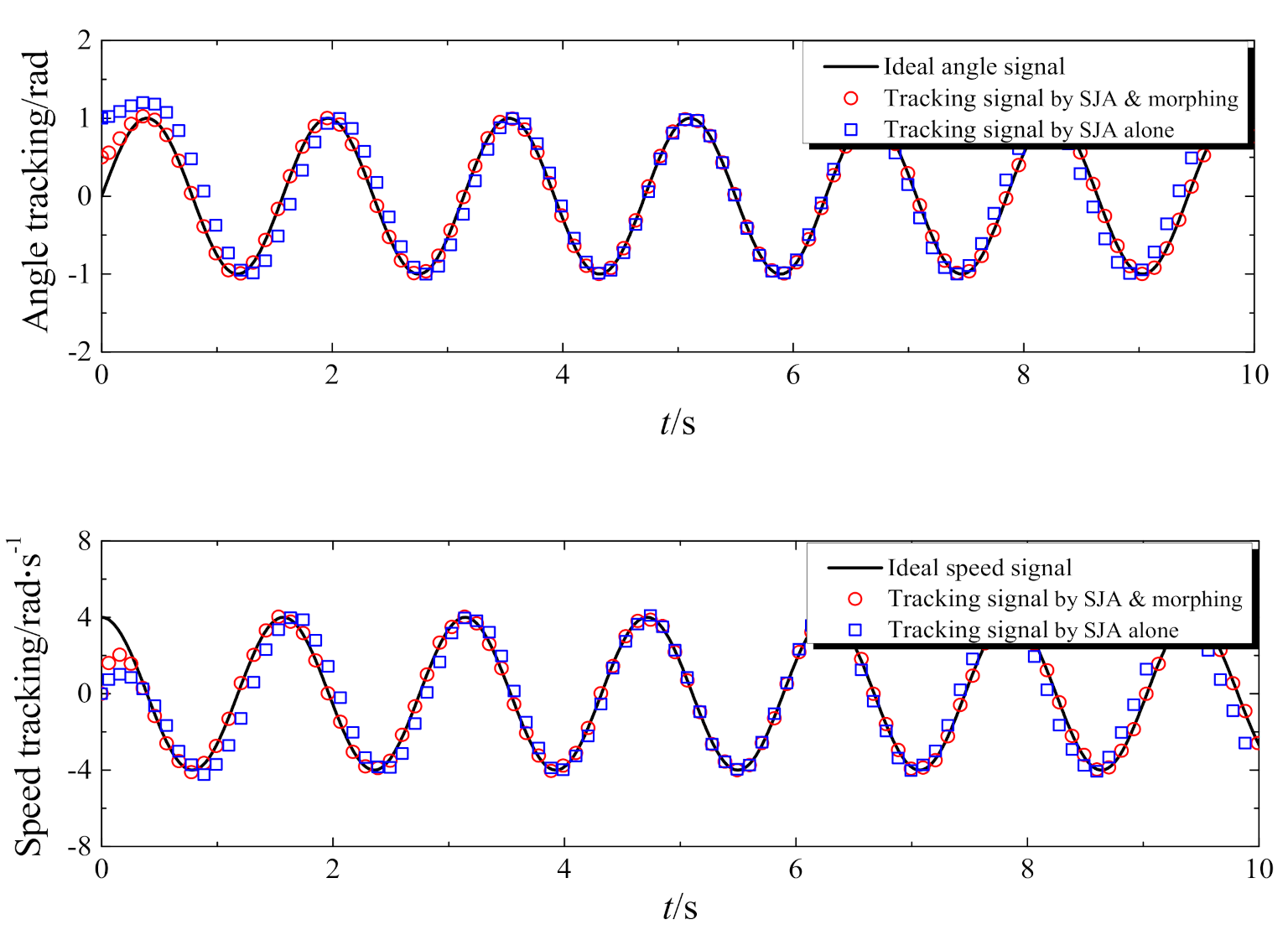
4.2. Roll Controlled by SJA
5. Conclusions
- The roll dynamic with a low frequency of morphing aircraft can be controlled by the morphing motion, which can track the ideal response within a few seconds, and
- By introducing active flow control based on SJA, roll motion with a higher frequency at a high AOA can be controlled within a fraction of a second, and an additional redundant controlled input provided by motion morphing will be conducive to improving the control performance of the system.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huang, R.; Yang, Z.; Yao, X.; Zhao, Y.; Hu, H. Parameterized Modeling Methodology for Efficient Aeroservoelastic Analysis of a Morphing Wing. AIAA J. 2019, 57, 5543–5552. [Google Scholar] [CrossRef]
- Yue, T.; Zhang, X.; Wang, L.; Ai, J. Flight Dynamic Modeling and Control for a Telescopic Wing Morphing Aircraft via Asymmetric Wing Morphing. Aerosp. Sci. Technol. 2017, 70, 328–338. [Google Scholar] [CrossRef]
- Zhao, Y.; Hu, H. Prediction of Transient Responses of a Folding Wing during the Morphing Process. Aerosp. Sci. Technol. 2013, 24, 89–94. [Google Scholar] [CrossRef]
- Weisshaar, T.A. Morphing Aircraft Systems: Historical Perspectives and Future Challenges. J. Aircr. 2013, 50, 337–353. [Google Scholar] [CrossRef]
- Seigler, T.M.; Neal, D.A. Analysis of Transition Stability for Morphing Aircraft. J. Guid. Control Dyn. 2009, 32, 1947–1954. [Google Scholar] [CrossRef]
- Huang, R.; Zhao, Y.; Hu, H. Wind-Tunnel Tests for Active Flutter Control and Closed-Loop Flutter Identification. AIAA J. 2016, 54, 2089–2099. [Google Scholar] [CrossRef]
- Waszak, M.R. Robust Multivariable Flutter Suppression for Benchmark Active Control Technology Wind-Tunnel. Model. J. Guid. Control Dyn. 2001, 24, 147–153. [Google Scholar] [CrossRef]
- Huang, R.; Hu, H.; Zhao, Y. Single-Input/Single-Output Adaptive Flutter Suppression of a Three-Dimensional Aeroelastic System. J. Guid. Control Dyn. 2015, 35, 659–665. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, J.; Huang, S.; Lin, Y.; Jiang, J. Computational Study of Axisymmetric Divergent Bypass Dual Throat Nozzle. Aerosp. Sci. Technol. 2019, 86, 177–190. [Google Scholar] [CrossRef]
- Cassaro, M.; Battipede, M.; Marzocca, P.; Behal, A. Comparison of Adaptive Control Architectures for Flutter Suppression. J. Guid. Control Dyn. 2015, 38, 346–355. [Google Scholar] [CrossRef]
- Ben-Asher, J.Z.; Cohen, K.; Adin, Z.; Moulin, B.; Weller, T. Flutter Supression Using Linear Optimal and Fuzzy Logic Techniques. J. Guid. Control Dyn. 2003, 26, 173–177. [Google Scholar] [CrossRef]
- Luo, M.; Gao, M.; Cai, G. Delayed Full-State Feedback Control of Airfoil Flutter Using Sliding Mode Control Method. J. Fluids Struct. 2016, 61, 262–273. [Google Scholar] [CrossRef]
- Huang, R.; Qian, W.; Hu, H.; Zhao, Y. Design of Active Flutter Suppression and Wind-Tunnel Tests of a Wing Model Involving a Control Delay. J. Fluids Struct. 2015, 55, 409–427. [Google Scholar] [CrossRef]
- Shi, R.; Peng, J. Morphing Strategy Design for Variable-Wing Aircraft. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar]
- Henry, J.; Pines, D.A. Mathematical Model for Roll Dynamics by Use of a Morphing-Span Wing. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007. [Google Scholar]
- Ajaj, R.M.; Friswell, M.I. Aeroelasticity of Compliant Span Morphing Wings. Smart Mater. Struct. 2018, 27, 105052. [Google Scholar] [CrossRef]
- Ajaj, R.M.; Friswell, M.I.; Flores, E.I.S.; Isikveren, A.T.; Allegri, G.; Adhikari, S.; Chaouk, H. An Integrated Conceptual Design Study Using Span Morphing Technology. J. Intell. Mater. Syst. Struct. 2013, 25, 989–1008. [Google Scholar] [CrossRef]
- Ajaj, R.M.; Friswell, M.; Flores, E.I.S.; Isikveren, A.T.; Little, O. Span Morphing: A Conceptual Design Study. In Proceedings of the 20th AIAA/ASME/AHS Adaptive Structures Conference, Honolulu, HI, USA, 23–26 April 2012. [Google Scholar]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A Review of Morphing Aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Mcgowan, A.R.; Waszak, M.R. NASA’s Morphing Project Research Summaries in Fiscal Year 2002. 2005. Available online: https://ntrs.nasa.gov/api/citations/20050137467/downloads/20050137467.pdf (accessed on 18 December 2020).
- Zhao, G.; Zhao, Q. Parametric Analyses for Synthetic Jet Control on Separation and Stall over Rotor Airfoil. Chin. J. Aeronaut. 2014, 27, 1051–1061. [Google Scholar] [CrossRef]
- Deb, D.; Tao, G.; Burkholder, J.O.; Smith, D.R. Adaptive Compensation Control of Synthetic Jet Actuator Arrays for Airfoil Virtual Shaping. J. Aircr. 2007, 44, 616–626. [Google Scholar] [CrossRef]
- Wei, Q.; Niu, Z.; Chen, B.; Huang, X. Bang-Bang Control Applied in Airfoil Roll Control with Plasma Actuators. J. Aircr. 2013, 50, 670–677. [Google Scholar] [CrossRef][Green Version]
- Li, C.; Yang, J. Roll Control Using Only Synthetic Jet Actuators at High Angle of Attack. J. Aircr. 2017, 54, 369–375. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X. Active Flow Control for Supersonic Aircraft: A Novel Hybrid Synthetic Jet Actuator. Sens. Actuators A Phys. 2020, 302, 111770. [Google Scholar] [CrossRef]
- He, W.; Luo, Z.; Deng, X.; Peng, W.Q.; Zhao, Z. Experimental Investigation on the Vectoring Spray Based on a Novel Synthetic Jet Actuator. Appl. Therm. Eng. 2020, 179, 115677. [Google Scholar] [CrossRef]
- Xu, X.; Zhou, Z. Study on Longitudinal Stability Improvement of Flying Wing Aircraft Based on Synthetic Jet Flow Control. Aerosp. Sci. Technol. 2015, 46, 287–298. [Google Scholar] [CrossRef]
- Li, W.; Jin, D.; Zhao, Y. Efficient Nonlinear Reduced-Order Modeling for Synthetic-Jet-Based Control at High Angle of Attack. Aerosp. Sci. Technol. 2017, 62, 98–107. [Google Scholar] [CrossRef]
- Melin, T. A Vortex Lattice Matlab Implementation for Linear Aerodynamic Wing Applications; Royal Institute of Technology: Stockholm, Sweden, 2000. [Google Scholar]
- He, Y.; Cary, A.; Peters, D. Parametric and Dynamic Modeling for Synthetic Jet Control of a Post-stall Airfoil. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar]
- Dahech, K.; Allouche, M.; Damak, T.; Tadeo, F. Backstepping Sliding Mode Control for Maximum Power Point Tracking of a Photovoltaic System. Electr. Power Syst. Res. 2017, 143, 182–188. [Google Scholar] [CrossRef]
- Efimov, D.; Polyakov, A.; Fridman, L.; Perruquetti, W.; Richard, J.P. Delayed Sliding Mode Control. Automatica 2016, 64, 37–43. [Google Scholar] [CrossRef]
- Liu, J. Radial Basis Function (RBF) Neural Network Control for Mechanical Systems Neural Network Sliding Mode Control; Tsinghua University Press: Beijing, China, 2013. [Google Scholar]
- Bradley, J.B. Neural Networks: A Comprehensive Foundation. Inf. Process. Manag. 1995, 31, 786. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, B.; Ye, Z.; Quan, J. Efficient Method for Limit Cycle Flutter Analysis Based on Nonlinear Aerodynamic Reduced-Order Models. AIAA J. 2012, 50, 1019–1028. [Google Scholar] [CrossRef]
- Seigler, T.M.; Neal, D.A.; Bae, J.; Inman, D.J. Modeling and Flight Control of Large-Scale Morphing Aircraft. J. Aircr. 2007, 44, 1077–1087. [Google Scholar] [CrossRef]
- Valasek, M. Design and Control of Under-actuated and over-Actuated Mechanical Systems: Challenges of Mechanics and Mechatronics. Veh. Syst. Dyn. 2003, 40, 37–49. [Google Scholar]
- Shi, R.; Wan, W. Analysis of Flight Dynamics for Large-Scale Morphing Aircraft. Aircr. Eng. Aerosp. Technol. 2015, 87, 38–44. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Wang, W.; Huang, X.; Zhang, S.; Li, C. Roll Control of Morphing Aircraft with Synthetic Jet Actuators at a High Angle of Attack. Appl. Sci. 2021, 11, 505. https://doi.org/10.3390/app11020505
Li W, Wang W, Huang X, Zhang S, Li C. Roll Control of Morphing Aircraft with Synthetic Jet Actuators at a High Angle of Attack. Applied Sciences. 2021; 11(2):505. https://doi.org/10.3390/app11020505
Chicago/Turabian StyleLi, Wencheng, Wenyun Wang, Xiaomao Huang, Shun Zhang, and Chenyang Li. 2021. "Roll Control of Morphing Aircraft with Synthetic Jet Actuators at a High Angle of Attack" Applied Sciences 11, no. 2: 505. https://doi.org/10.3390/app11020505
APA StyleLi, W., Wang, W., Huang, X., Zhang, S., & Li, C. (2021). Roll Control of Morphing Aircraft with Synthetic Jet Actuators at a High Angle of Attack. Applied Sciences, 11(2), 505. https://doi.org/10.3390/app11020505