
The Manning’s Roughness Coefficient Calibration Method to Improve Flood Hazard Analysis in the Absence of River Bathymetric Data: Application to the Urban Historical Zamora City Centre in Spain

 ,
,  , and
, and 
Abstract
:Featured Application
Abstract
1. Introduction
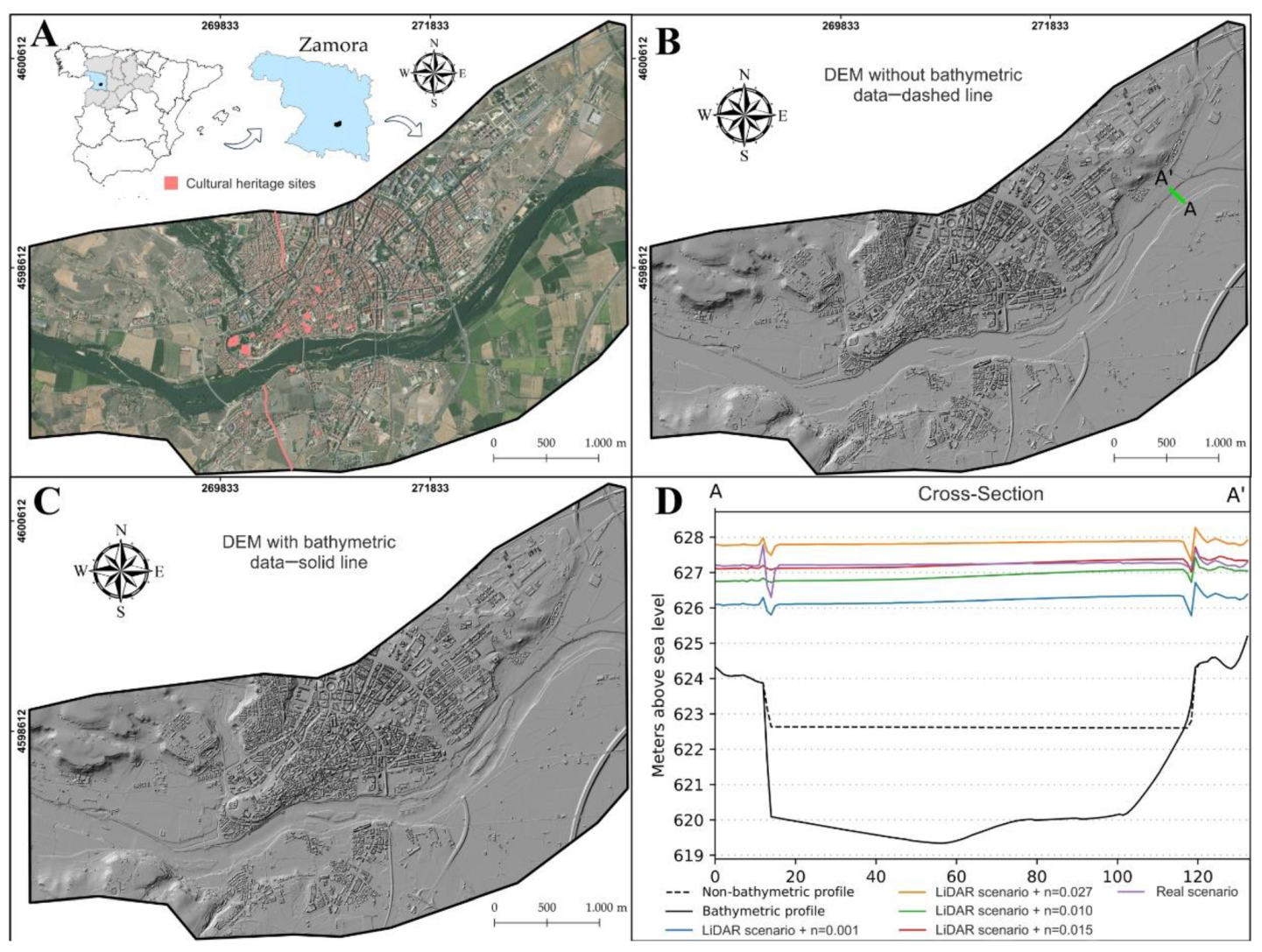
2. Study Area and Data Description
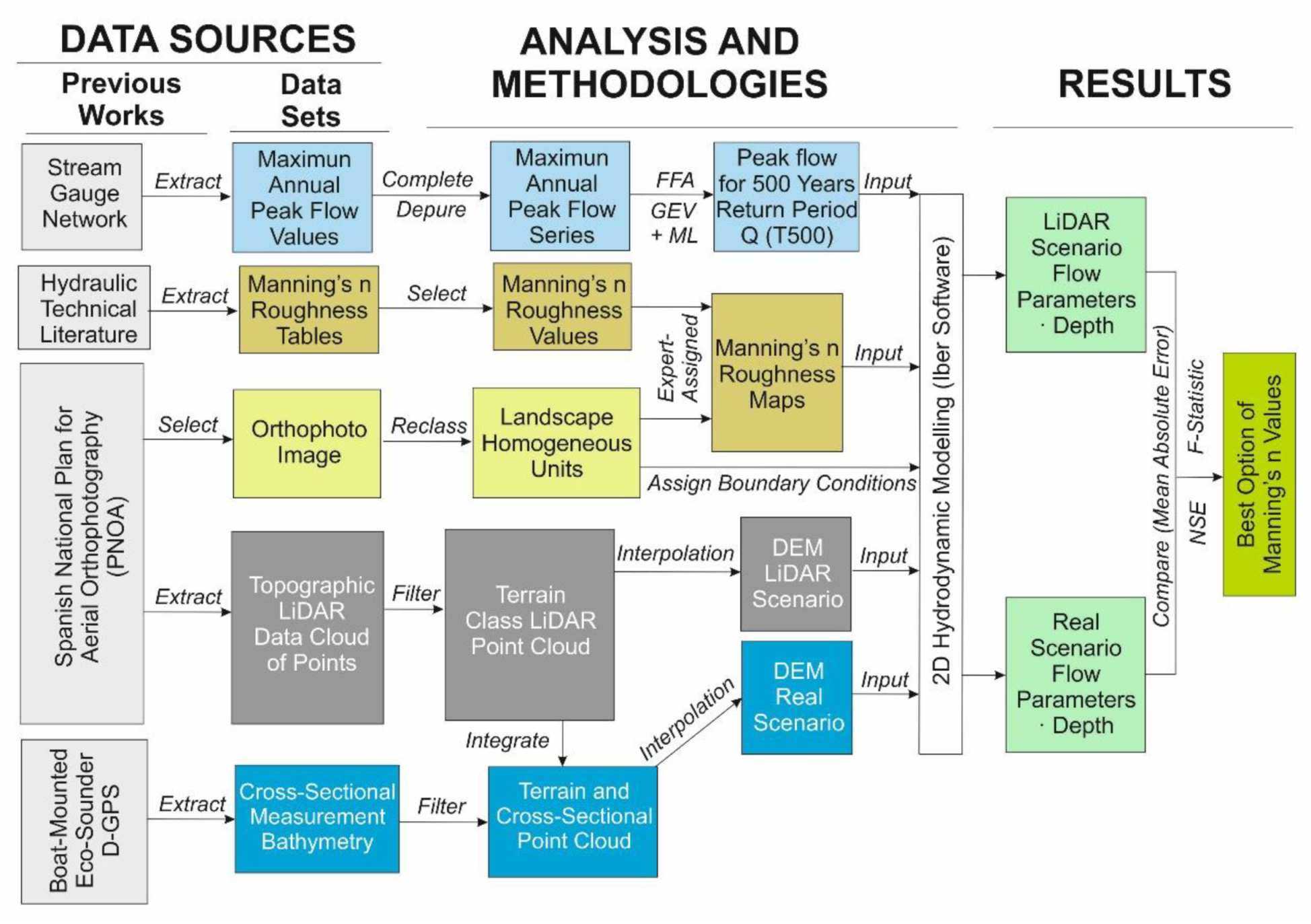
3. Methodology
3.1. Comparison of Bathymetric Representation
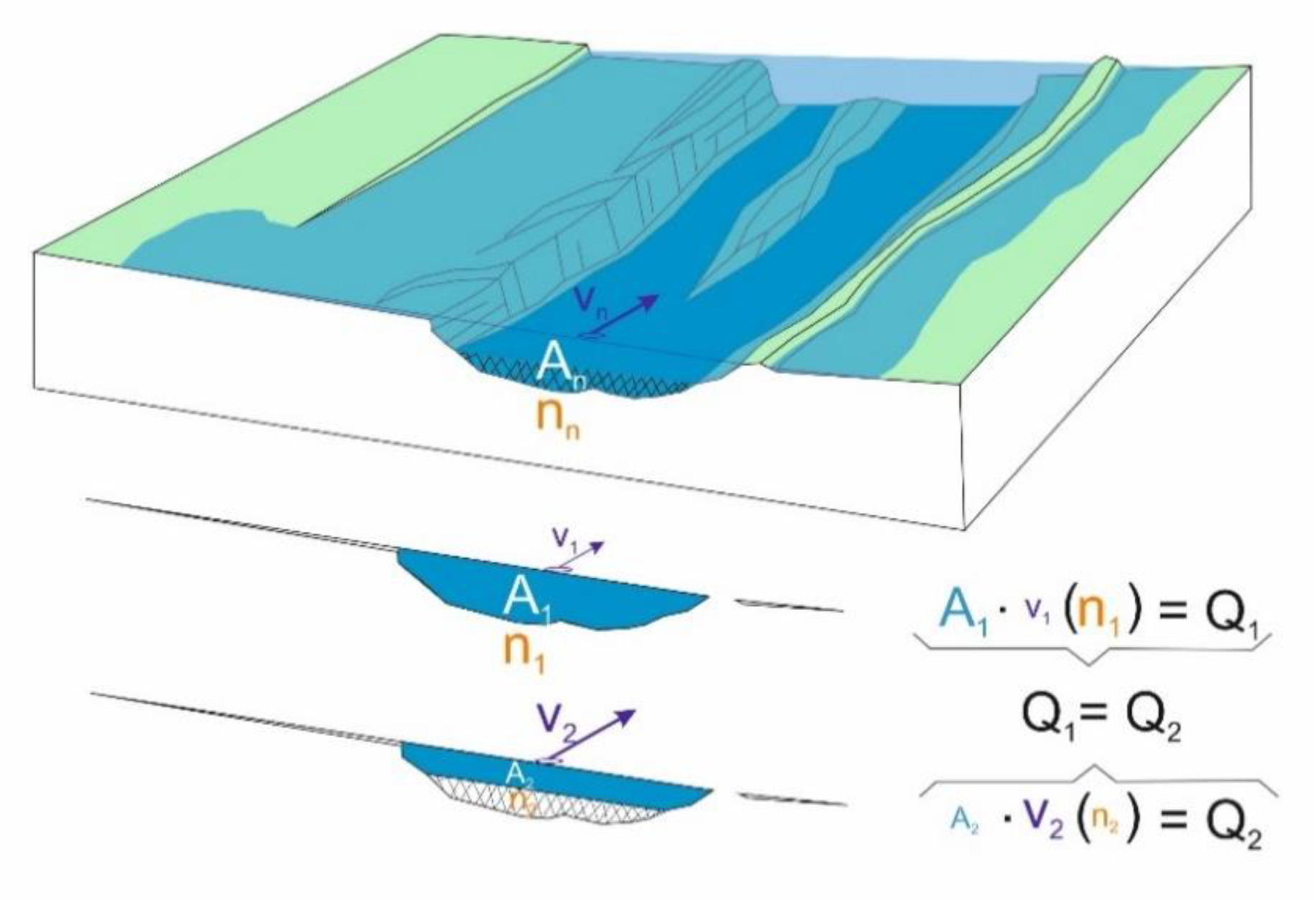
3.2. Hydraulic Modelling and Calibration Process
3.3. Comparison of Hydrodynamic Model Outputs
4. Results and Discussion
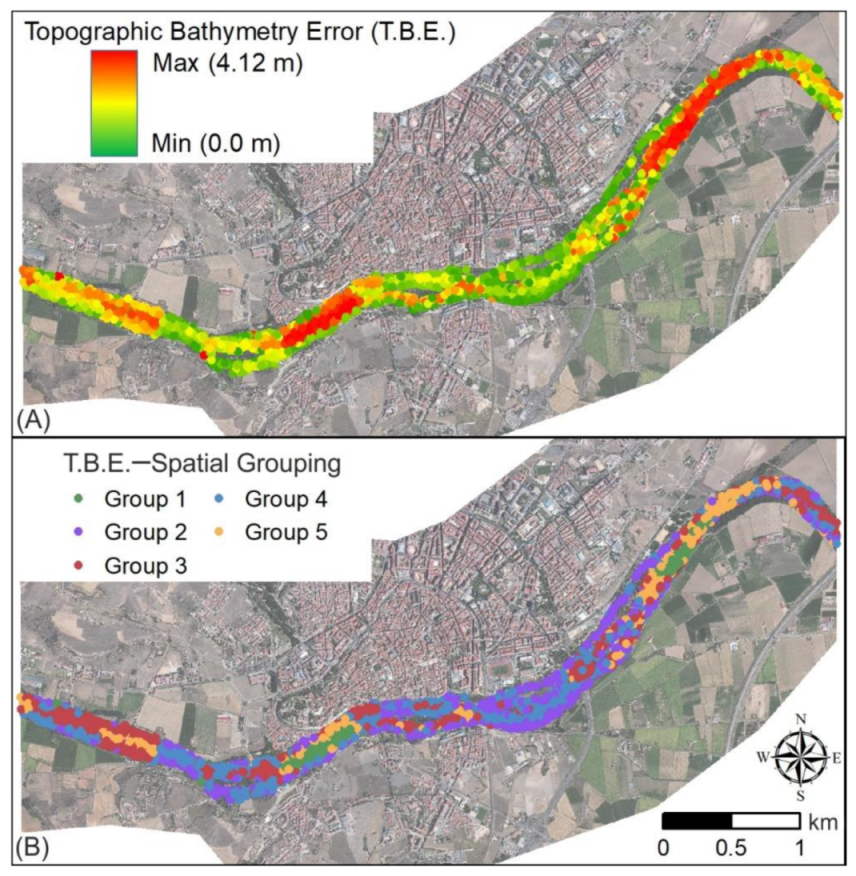
4.1. “Real Scenario” vs. “LiDAR Scenario” Bathymetric Differences
4.2. Manning’s n Value Calibration
4.3. Flow Depth Models Analysis and Optimal Model Selection
4.4. Local Results at Cultural Heritage Sites in Zamora (Spain)
5. Conclusions
- -
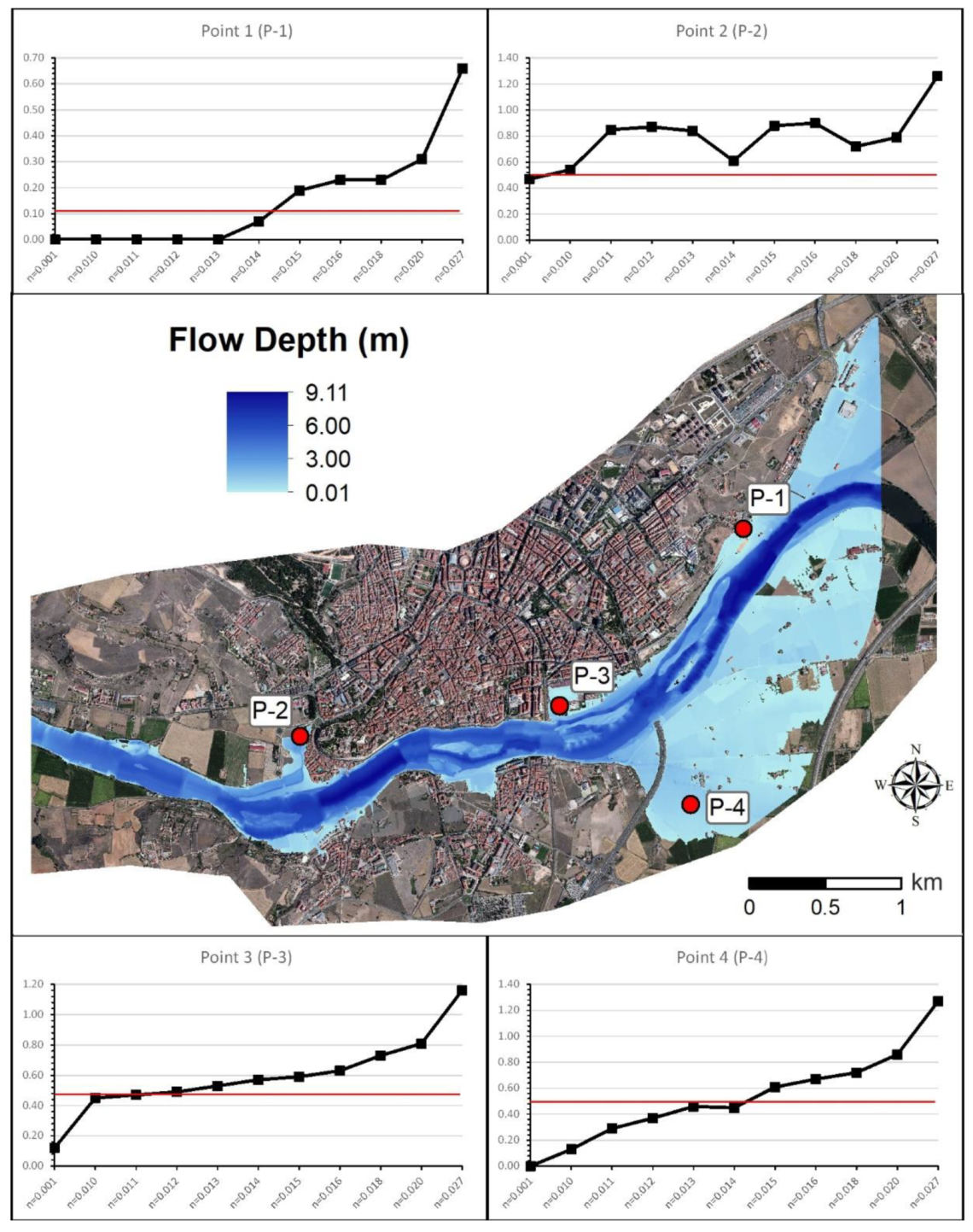
- The results obtained show a clear improvement when compared to the direct use of LiDAR topographic information combined with a Manning’s n value according to the characteristics of the river channel studied. The results from the methodological developed model (500-year return period peak flow) and the methodological testing model (100-year return period peak flow) converged toward a range of Manning’s n values from 0.014 to 0.016, which is far from the 0.027 that is selected based on the Douro River reach characteristics. A slight uncertainty in the best range of the Manning’s n value was seen depending on the magnitude of the peak flow rate used. The magnitude of the peak flow rate and the optimal Manning’s value show an inverse relationship.
- -
- For the case of the Douro River in Zamora, the results of the hydrodynamic modelling under the “LiDAR scenario” and the “natural” Manning’s n value conditions (n = 0.027) caused average errors of 50–75 cm in the flow depth estimation. By calibrating the Manning’s n value, these average errors could be reduced to a value close to 10 cm.
- -
- By transferring the errors in flow depth to the estimation of direct damage due to floods (based on the widely used USACE damage magnitude model), we achieved a reduction in the error in the percentage of damage from values of 25–30% to errors close to 5%.
- -
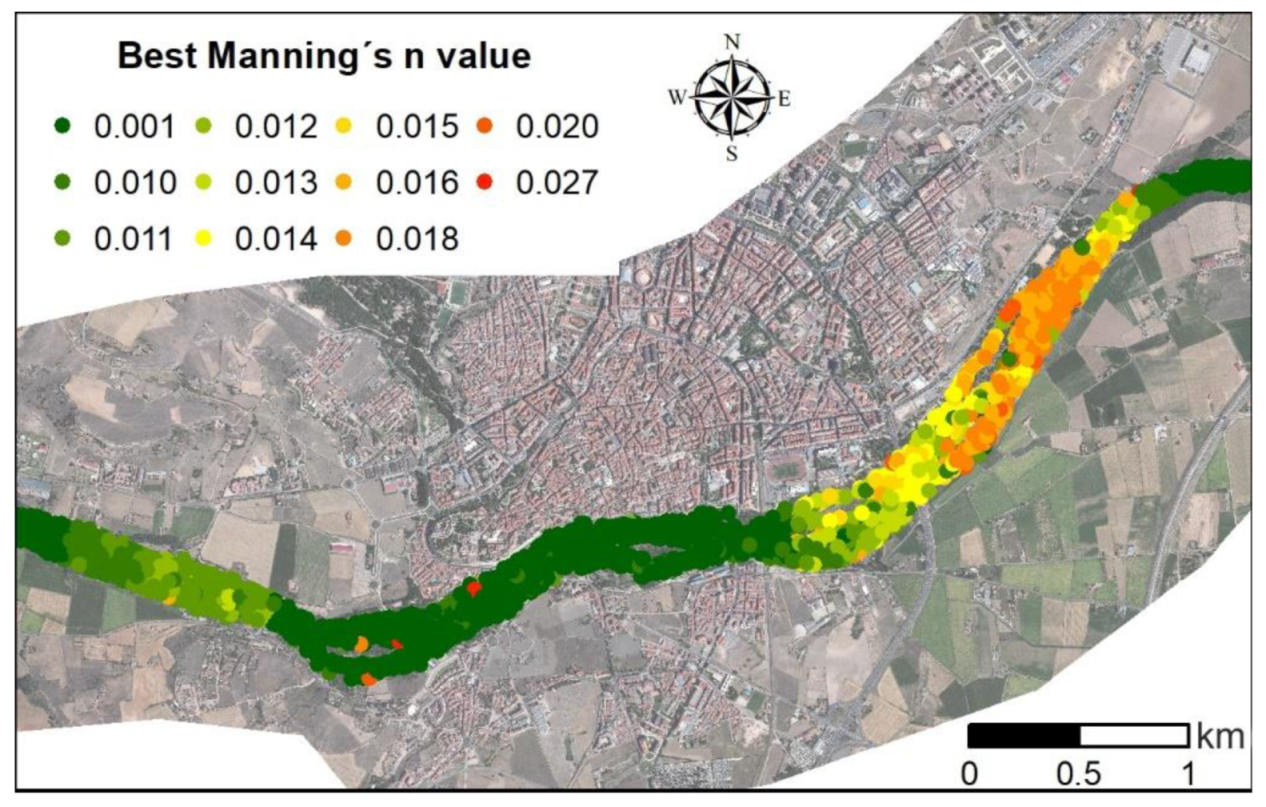
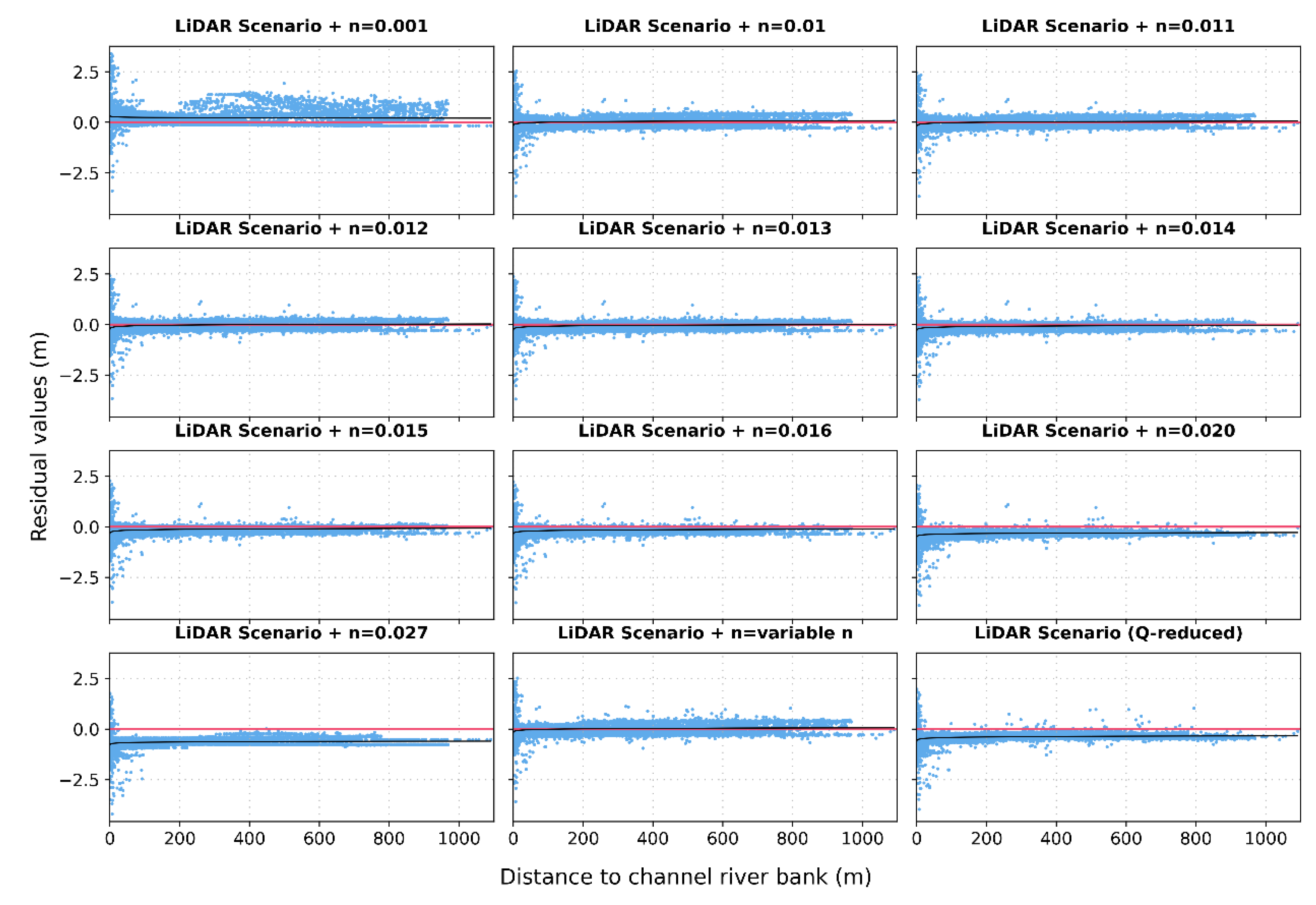
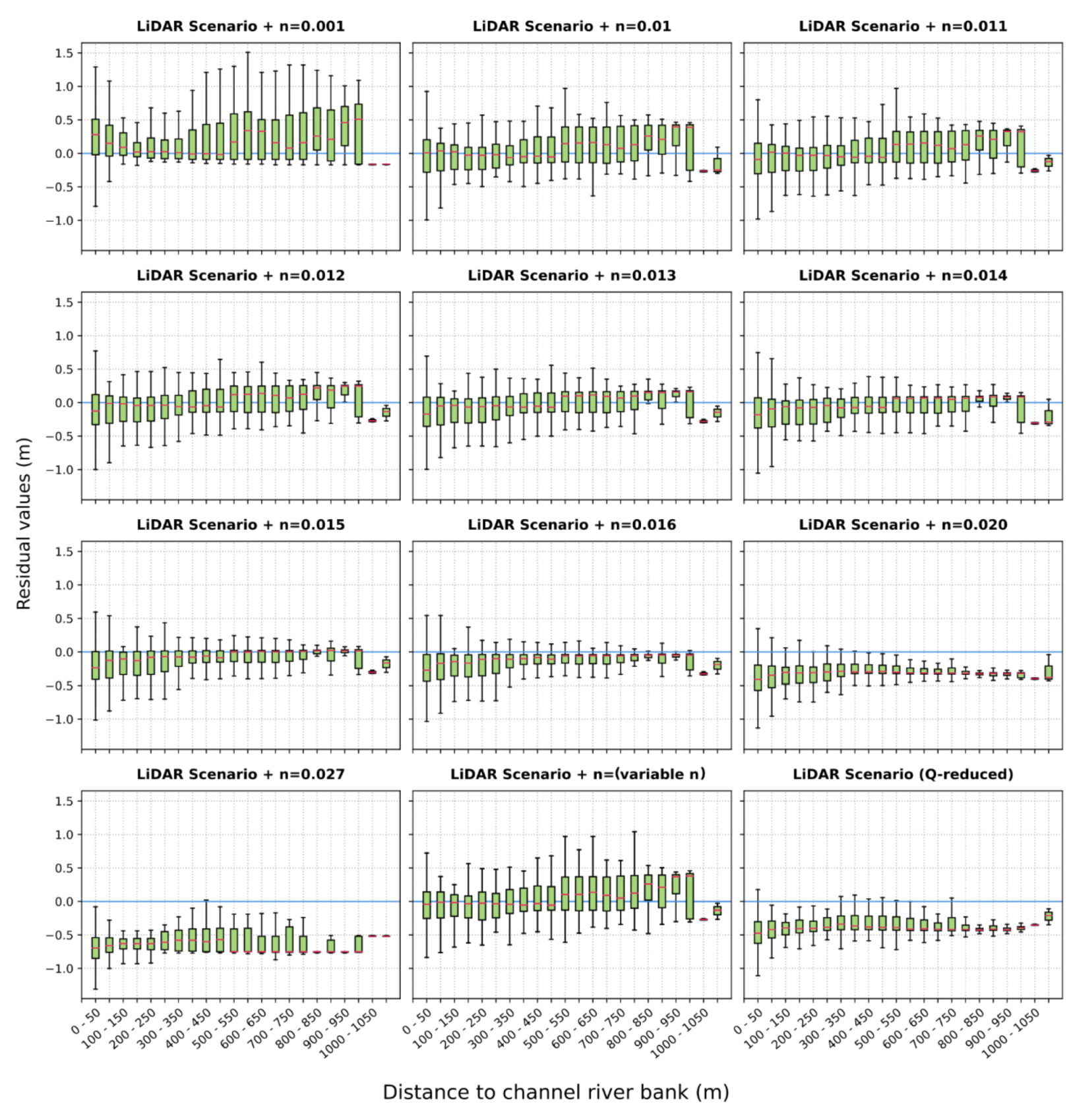
- The results of the calibration of the Manning’s n value for the 500-year return period peak flow showed that the best fit varied according to the distance from the riverbank such that we could select different values of n (within a range between 0.011 and 0.014) depending on whether the area of greatest interest (in the hazard assessment) was close to the channel (lower value of n) or far from it (higher value of n). In any case, this implied the use of values of approximately half those used in real conditions. In the case of the 100-year return period peak flow, the best option of Manning’s value for areas far from the riverbank went up to 0.016.
- -
- A uniform Manning’s n value (for the river channel) was used both for the control “real scenario” and for each Manning’s n value calibrated model. However, a spatially distributed Manning’s n value was used too, and the results, although good, did not significantly improve on those obtained in the constant value models. In fact, it was observed that this model offered better results for distances up to 550 m from the riverbed, but at greater distances, the results worsen.
- -
- A hydraulic approach, namely, the HDCM, was also used, but the results were far from satisfactory. In fact, the results associated with this model were among the worst of those obtained in the present study. This situation calls into question the usefulness of this approach as a solution to the absence of bathymetric data in cases where the flow rates (on the date of acquisition of the topographic data, and those associated with the study) are very different.
- -
- The present work is the first contribution to a methodological framework that should be improved by applying it in other areas where the river characteristics (river slope, channel typology, sinuosity, percentage of reduction of the channel cross-section, etc.) are different from those shown in the present work. In this way, the objective of having a range of Manning’s n values depending on the specific characteristics of the study area could be achieved. This approach could represent an interesting scientific-technical innovation in the analysis of flood risks. Furthermore, in the present state, the use of “not natural lower Manning’s n value” was shown to be an optimal option for the improvement of flood damage estimates in urban areas where there is no availability of bathymetric data.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DEM | Digital elevation model |
| FEMA | Federal Emergency Management Agency |
| HDCM | Horizontally divided channel method |
| LiDAR | Light detection and ranging |
| MAE | Mean absolute error |
| NSE | Nash–Sutcliffe efficiency index |
| PNOA | Plan Nacional Orto-fotografía Aérea (Aerial Ortho-photography National Plan) |
| SNCZI | Sistema Nacional de Cartografía de Zonas Inundables (Flood Prone Areas Mapping National Plan) |
| VDCM | Vertically divided channel method |
References
- Istituto Centrale per il Restauro, Carta del Rischio, versione 2.1.1, Direzione Generale Sicurezza del Patrimonio Culturale (MIBACT). Available online: http://www.cartadelrischio.beniculturali.it/webgis/ (accessed on 30 October 2020).
- Consiglio Nazionale Delle Ricerche, NOAH’s Ark project, CORDIS EU research results. Available online: https://cordis.europa.eu/project/id/501837 (accessed on 30 October 2020).
- Lanza, S.G. Flood hazard threat on cultural heritage in the town of Genoa (Italy). J. Cult. Herit. 2003, 4, 159–167. [Google Scholar] [CrossRef]
- Mazzanti, M. Valuing cultural heritage in a multi-attribute framework microeconomic perspectives and policy implications. J. Socio-Econ. 2003, 32, 549–569. [Google Scholar] [CrossRef]
- Ortiz, R.; Ortiz, P.; Martín, J.M.; Vázquez, M.A. A new approach to the assessment of flooding and dampness hazards in cultural heritage, applied to the historic centre of Seville (Spain). Sci. Total Environ. 2016, 551–552, 546–555. [Google Scholar] [CrossRef]
- Arrighi, C.; Brugioni, M.; Castelli, F.; Franceschini, S.; Mazzanti, B. Flood risk assessment in art cities: The exemplary case of Florence (Italy). J. Flood Risk Manag. 2018, 11, S616–S631. [Google Scholar] [CrossRef]
- Figueiredo, R.; Romão, X.; Paupério, E. Flood risk assessment of cultural heritage at large spatial scales: Framework and application to mainland Portugal. J. Cult. Herit. 2020, 43, 163–174. [Google Scholar] [CrossRef]
- CRED. The International Disaster Database [online], Centre for Research on the Epidemiology of Disasters. Available online: http://emdat.be/emdat_db/ (accessed on 10 April 2021).
- Munich RE. NatCatSERVICE Database. Available online: https://natcatservice.munichre.com/ (accessed on 17 July 2020).
- Ward, P.J.; Jongman, B.; Sperna Weiland, F.C.; Bouwman, A.; Van Beek, R.; Bierkens, M.; Ligtvoet, W.; Winsemius, H.C. Assessing flood risk at the global scale: Model setup, results, and sensitivity. Environ. Res. Lett. 2013, 8, 044019. [Google Scholar] [CrossRef]
- Visser, H.; Bouwman, A.; Petersen, A.; Ligtvoet, W. A Statistical Study of Weather–Related Disasters: Past, Present and Future; PBL Netherlands Environmental Assessment Agency: The Hague, The Netherlands, 2012.
- Merz, B.; Kreibich, H.; Schwarze, R.; Thieken, A. Assessment of economic flood damage. Nat Hazards Earth Syst. Sci. 2010, 10, 1697–1724. [Google Scholar] [CrossRef]
- USACE. Economic Guidance Memorandum (EGM) 04-01, Generic Depth-Damage Relationships for Residential Structures with Basements; USACE: Washington, DC, USA, 2003. [Google Scholar]
- Garrote, J.; Alvarenga, F.M.; Díez-Herrero, A. Quantification of flash flood economic risk using ultra-detailed stage–damage functions and 2-D hydraulic models. J. Hydrol. 2016, 541, 611–625. [Google Scholar] [CrossRef]
- Huizinga, J.; De Moel, H.; Szewczyk, W. Global Flood Depth–Damage Functions: Methodology and the Database with Guidelines; Joint Research Centre: Luxembourg, 2017. [Google Scholar]
- Deniz, D.; Arneson, E.E.; Liel, A.B.; Dashti, S.; Javernick-Will, A.N. Flood loss models for residential buildings, based on the 2013 Colorado floods. Nat. Hazards 2017, 85, 977–1003. [Google Scholar] [CrossRef]
- Zabret, K.; Hozjan, U.; Kryžanowsky, A.; Brilly, M.; Vidmar, A. Development of model for the estimation of direct flood damage including the movable property. J. Flood Risk Manag. 2018, 11, S527–S540. [Google Scholar] [CrossRef]
- Schoppa, L.; Sieg, T.; Vogel, K.; Zöller, G.; Kreibich, H. Probabilistic flood loss models for companies. Water Resour. Res. 2020, 56, e2020WR027649. [Google Scholar] [CrossRef]
- Paprotny, D.; Kreibich, H.; Morales-Nápoles, O.; Castellarin, A.; Carisi, F.; Schröter, K. Exposure and vulnerability estimation for modelling flood losses to commercial assets in Europe. Sci. Total Environ. 2020, 737, 140011. [Google Scholar] [CrossRef]
- Díez-Herrero, A.; Lain-Huerta, L.; Llorente-Isidro, M. A Handbook on Flood Hazard Mapping Methodologies; Publications of the Geological Survey of Spain (IGME): Madrid, Spain, 2009. [Google Scholar]
- Casas, A.; Benito, G.; Thorndycraft, V.R.; Rico, M. The topographic data source of digital terrain models as a key element in the accuracy of hydraulic flood modelling. Earth Surf. Proc. Land. 2006, 31, 444–456. [Google Scholar] [CrossRef]
- Bermúdez, M.; Zischg, A.P. Sensitivity of flood loss estimates to building representation and flow depth attribution methods in micro–scale flood modelling. Nat. Hazards 2018, 92, 1633. [Google Scholar] [CrossRef] [Green Version]
- Dey, S.; Saksena, S.; Merwade, V. Assessing the effect of different bathymetric models on hydraulic simulation of rivers in data sparse regions. J. Hydrol. 2019, 575, 838–851. [Google Scholar] [CrossRef]
- Arrighi, C.; Campo, L. Effects of digital terrain model uncertainties on high resolution urban flood damage assessment. J. Flood Risk Manag. 2019, 12, e12530. [Google Scholar] [CrossRef] [Green Version]
- Vieux, B.E. Hydraulic Roughness. In Distributed Hydrologic Modeling Using GIS; Vieux, B.E., Ed.; Springer: Heidelberg, Germany, 2016; pp. 101–114. [Google Scholar] [CrossRef]
- Boyer, M. Estimating the Manning coefficient from an average bed roughness in open channels. Eos. Trans. Am. Geophys. Union 1954, 35, 957–961. [Google Scholar] [CrossRef]
- Kidson, R.; Richards, K.; Carling, P. Hydraulic model calibration for extreme floods in bedrock-confined channels: Case study from northern Thailand. Hydrol. Process. 2006, 20, 329–344. [Google Scholar] [CrossRef]
- Ballesteros, J.; Bodoque, J.; Díez-Herrero, A.; Sanchez-Silva, M.; Stoffel, M. Calibration of floodplain roughness and estimation of flood discharge based on treering evidence and hydraulic modelling. J. Hydrol. 2011, 403, 103–115. [Google Scholar] [CrossRef]
- Cook, A.; Merwade, V. Effect of topographic data, geometric configuration and modeling approach on flood inundation mapping. J. Hydrol. 2009, 377, 131–142. [Google Scholar] [CrossRef]
- Boettle, M.; Kropp, J.P.; Reiber, L.; Roithmeier, O.; Rybski, D.; Walther, C. About the influence of elevation model quality and small-scale damage functions on flood damage estimation. Nat. Hazards Earth Syst. Sci. 2011, 11, 3327–3334. [Google Scholar] [CrossRef]
- Kinzel, P.J.; Legleiter, C.J.; Nelson, J.M. Mapping River Bathymetry with a Small Footprint Green LiDAR: Applications and Challenges. J. Am. Water Resour. Ass. (JAWRA) 2012, 49, 183–204. [Google Scholar] [CrossRef]
- Allouis, T.; Bailly, J.S.; Pastol, Y.; LeRoux, C. Comparison of LiDAR Waveform Processing Methods for Very Shallow Water Bathymetry Using Raman, Near-Infrared and Green Signals. Earth Surf. Proc. Land. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Bangen, S.G.; Wheaton, J.M.; Bouwes, N.; Bouwes, B.; Jordan, C. A methodological intercomparison of topographic survey techniques for characterizing wadeable streams and rivers. Geomorphology 2014, 206, 343–361. [Google Scholar] [CrossRef]
- Hostache, R.; Matgen, P.; Giustarini, L.; Teferle, F.N.; Tailliez, C.; Iffly, J.; Corato, G. A drifting GPS buoy for retrieving effective riverbed bathymetry. J. Hydrol. 2015, 520, 397–406. [Google Scholar] [CrossRef] [Green Version]
- Fonstad, M.A.; Marcus, W.A. Remote sensing of stream depths with hydraulically assisted bathymetry (HAB) models. Geomorphology 2005, 72, 320–339. [Google Scholar] [CrossRef]
- Trigg, M.A.; Wilson, M.D.; Bates, P.D.; Horritt, M.S.; Alsdorf, D.E.; Forsberg, B.R.; Vega, M.C. Amazon flood wave hydraulics. J. Hydrol. 2009, 374, 92–105. [Google Scholar] [CrossRef]
- Gichamo, T.Z.; Popescu, I.; Jonoski, A.; Solomatine, D. River cross-section extraction from the ASTER global DEM for flood modeling. Environ. Model. Softw. 2012, 31, 37–46. [Google Scholar] [CrossRef]
- Grimaldi, S.; Li, Y.; Walker, J.P.; Pauwels, V.R.N. Effective representation of river geometry in hydraulic flood forecast models. Water Resour. Res. 2018, 54, 1031–1057. [Google Scholar] [CrossRef]
- Bradbrook, K.F.; Lane, S.N.; Waller, S.G.; Bates, P.D. Two dimensional diffusion wave modelling of flood inundation using a simplified channel representation. Int. J. River Basin Manag. 2004, 2, 211–223. [Google Scholar] [CrossRef]
- Choné, G.; Biron, P.M.; Buffin-Bélanger, T. Flood hazard mapping techniques with LiDAR in the absence of river bathymetry data. In E3S Web of Conferences, Proceedings of the River Flow 2018—Ninth International Conference on Fluvial Hydraulics, Lyon, France, 5–8 September 2018; EDP Science: Les Ulis, France, 2018; Abstract 06005. [Google Scholar]
- Wolman, M.G.; Miller, J.P. Magnitude and Frequency of Forces in Geomorphic Processes. J. Geol. 1960, 68, 54–74. [Google Scholar] [CrossRef] [Green Version]
- Ardıçlıoğlu, M.; Kuriqi, A. Calibration of channel roughness in intermittent rivers using HEC-RAS model: Case of Sarimsakli creek, Turkey. SN Appl. Sci. 2019, 1, 1080. [Google Scholar] [CrossRef] [Green Version]
- Hawker, L.; Bates, P.; Neal, J.; Rougier, J. Perspectives on Digital Elevation Model (DEM) Simulation for Flood Modeling in the Absence of a High-Accuracy Open Access Global DEM. Front. Earth Sci. 2018, 6, 233. [Google Scholar] [CrossRef] [Green Version]
- Instituto Geográfico Nacional, LiDAR PNOA. 2014. Available online: https://pnoa.ign.es/el-proyecto-pnoa-lidar (accessed on 30 October 2020).
- Arcement, G.J.; Schneider, V.R. Guide for Selecting Manning’s Roughness Coefficients for Natural Channels and Flood Plains; USGS: Denver, CO, USA, 1989.
- Brunner, G.W. HEC-RAS, River Analysis System Hydraulic Reference Manual, Version 4.1; U.S. Army Corps of Engineers: Davis, CA, USA, 2010. [Google Scholar]
- Bladé, E.; Cea, L.; Corestein, G.; Escolano, E.; Puertas, J.; Vázquez-Cendón, E.; Dolz, J.; Coll, A. Iber: Herramienta de simulación numérica del flujo en ríos. Rev. Intern. Met. Num. Calc. Dis. Ingen. 2014, 30, 1–10. [Google Scholar] [CrossRef] [Green Version]
- ESRI. ArcMap. 2011. Available online: https://desktop.arcgis.com/es/arcmap/ (accessed on 30 October 2020).
- Hunter, J.D. Matplotlib: A 2D Graphics Environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Bates, P.D.; De Roo, A.P.J. A simple raster-based model for flood inundation simulation. J. Hydrol. 2000, 236, 54–77. [Google Scholar] [CrossRef]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Tayefi, V.; Lane, S.N.; Hardy, R.J.; Yu, D. A comparison of one- and two dimensional approaches to modelling flood inundation over complex upland floodplains. Hydrol. Process. 2007, 21, 3190–3202. [Google Scholar] [CrossRef]
- Saleh, F.; Ducharne, A.; Flipo, N.; Oudin, L.; Ledoux, E. Impact of river bed morphology on discharge and water levels simulated by a 1D Saint—Venant hydraulic model at regional scale. J. Hydrol. 2012, 476, 1–9. [Google Scholar] [CrossRef]
- Casas, A.; Lane, S.; Hardy, R.J.; Benito, G.; Whiting, P.J. Reconstruction of subgrid-scale topographic variability and its effect upon the spatial structure of three-dimensional river flow. Water Resour. Res. 2010, 46, W03519. [Google Scholar] [CrossRef] [Green Version]
- Casas, A.; Stuart, L.; Dapeng, Y.; Benito, G. A method for parameterising roughness and topographic sub-grid scale effects in hydraulic modelling from LiDAR data. Hydrol. Earth Syst. Sci. 2010, 14, 1567–1579. [Google Scholar] [CrossRef] [Green Version]
- Benito, G.; Díez-Herrero, A. Palaeoflood Hydrology: Reconstructing Rare Events and Extreme Flood Discharges. In Hydro-Meteorological Hazards, Risks, and Disasters; Paron, P., Di Baldassarre, G., Eds.; Elsevier: Amsterdam, The Netherlands, 2015; pp. 65–104. [Google Scholar]
- Cowan, W.L. Estimating hydraulic roughness coefficients. Agr. Eng. 1956, 37, 473–475. [Google Scholar]
- Chow, V.T. Open-Channel Hydraulics; McGraw-Hill Book Co.: New York, NY, USA, 1959; 680p. [Google Scholar]
- Ercan, A.; Kavvas, M.L. Scaling and self-similarity in two-dimensional hydrodynamics. Chaos 2015, 25, 075404. [Google Scholar] [CrossRef] [PubMed]
- Larsen, L.G.; Ma, J.; Kaplan, D. How Important Is Connectivity for Surface Water Fluxes? A Generalized Expression for Flow Through Heterogeneous Landscapes. Geophys. Res. Lett. 2017, 44, 10349–10358. [Google Scholar] [CrossRef]
- Prior, E.M.; Aquilina, C.A.; Czuba, J.A.; Pingel, T.J.; Hession, W.C. Estimating Floodplain Vegetative Roughness Using Drone-Based Laser Scanning and Structure from Motion Photogrammetry. Remote Sens. 2021, 13, 2616. [Google Scholar] [CrossRef]
- Limerinos, J.T. Determination of the Manning Coefficient from Measured Bed Roughness in Natural Channels; United States Geological Survey: Washington, DC, USA, 1970; 53p.
- Simons, D.B.; Richardson, E.V. Resistance to Flow in Alluvial Channels; United States Geological Survey: Washington, DC, USA, 1966; 70p.
- Horritt, M.S. A linearized approach to flow resistance uncertainty in a 2-D finite volume model of flood flow. J. Hydrol. 2006, 316, 13–27. [Google Scholar] [CrossRef]
- Timbadiya, P.V.; Patel, P.L.; Porey, P.D. Calibration of HEC-RAS model on prediction of flood for lower Tapi River, India. J. Water Resour. Prot. 2011, 3, 805–811. [Google Scholar] [CrossRef] [Green Version]
- Attari, M.; Hosseini, S.M. A simple innovative method for calibration of Manning’s roughness coefficient in rivers using a similarity concept. J. Hydrol. 2019, 575, 810–823. [Google Scholar] [CrossRef]
- Wagenaar, D.J.; de Bruijn, K.M.; Bouwer, L.M.; de Moel, H. Uncertainty in flood damage estimates and its potential effect on investment decisions. Nat. Hazards Earth Syst. Sci. 2016, 16, 1–14. [Google Scholar] [CrossRef] [Green Version]
- FEMA. Federal Emergency Management Agency, Flood Map, Flood Insurance Rate Map (FIRM). 2009. Available online: https://floodpartners.com/fema-flood-map/ (accessed on 30 October 2020).
- Dirección General del Agua, Sistema Nacional de Cartografía de Zonas Inundables (SNCZI). 2013. Available online: https://sig.mapama.gob.es/snczi/index.html?herramienta=DPHZI (accessed on 25 October 2020).
- First Street Foundation, Flood Factor. 2019. Available online: https://floodfactor.com/ (accessed on 27 October 2020).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean | Median | Mode | Standard Deviation | Variance | F-Statistic | NSE Index | |
|---|---|---|---|---|---|---|---|
| LiDAR Scenario + n = 0.001 | 0.231 | 0.417 | 0.100 | −0.110 | 0.174 | 81.76 | 0.9976 |
| LiDAR Scenario + n = 0.010 | 0.024 | 0.326 | 0.026 | 0.050 | 0.106 | 91.94 | 0.9998 |
| LiDAR Scenario + n = 0.011 | 0.000 | 0.311 | 0.010 | 0.050 | 0.096 | 92.30 | 0.9976 |
| LiDAR Scenario + n = 0.012 | −0.029 | 0.298 | −0.007 | 0.050 | 0.089 | 92.68 | 0.9860 |
| LiDAR Scenario + n = 0.013 | −0.061 | 0.287 | −0.027 | 0.050 | 0.082 | 93.19 | 0.9944 |
| LiDAR Scenario + n = 0.014 | −0.094 | 0.280 | −0.045 | 0.050 | 0.079 | 93.46 | 0.9727 |
| LiDAR Scenario + n = 0.015 | −0.130 | −0.073 | 0.030 | 0.269 | 0.073 | 93.92 | 0.9994 |
| LiDAR Scenario + n = 0.016 | −0.169 | −0.106 | 0.040 | 0.263 | 0.069 | 93.34 | 0.9985 |
| LiDAR Scenario + n = 0.018 | −0.251 | 0.257 | −0.191 | −0.182 | 0.066 | 91.11 | 0.9953 |
| LiDAR Scenario + n = 0.020 | −0.332 | 0.254 | −0.314 | −0.312 | 0.065 | 89.10 | 0.9920 |
| LiDAR Scenario + n = 0.027 | −0.641 | 0.260 | −0.660 | −0.750 | 0.068 | 84.19 | 0.9236 |
| LiDAR Scenario + ndistrib | 0.010 | 0.005 | 0.050 | 0.316 | 0.100 | 93.05 | 0.9981 |
| real Scenario + Q reduced + n = 0.027 | −0.393 | −0.407 | −0.416 | 0.258 | 0.067 | 87.65 | 0.9894 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garrote, J.; González-Jiménez, M.; Guardiola-Albert, C.; Díez-Herrero, A. The Manning’s Roughness Coefficient Calibration Method to Improve Flood Hazard Analysis in the Absence of River Bathymetric Data: Application to the Urban Historical Zamora City Centre in Spain. Appl. Sci. 2021, 11, 9267. https://doi.org/10.3390/app11199267
Garrote J, González-Jiménez M, Guardiola-Albert C, Díez-Herrero A. The Manning’s Roughness Coefficient Calibration Method to Improve Flood Hazard Analysis in the Absence of River Bathymetric Data: Application to the Urban Historical Zamora City Centre in Spain. Applied Sciences. 2021; 11(19):9267. https://doi.org/10.3390/app11199267
Chicago/Turabian StyleGarrote, Julio, Miguel González-Jiménez, Carolina Guardiola-Albert, and Andrés Díez-Herrero. 2021. "The Manning’s Roughness Coefficient Calibration Method to Improve Flood Hazard Analysis in the Absence of River Bathymetric Data: Application to the Urban Historical Zamora City Centre in Spain" Applied Sciences 11, no. 19: 9267. https://doi.org/10.3390/app11199267
APA StyleGarrote, J., González-Jiménez, M., Guardiola-Albert, C., & Díez-Herrero, A. (2021). The Manning’s Roughness Coefficient Calibration Method to Improve Flood Hazard Analysis in the Absence of River Bathymetric Data: Application to the Urban Historical Zamora City Centre in Spain. Applied Sciences, 11(19), 9267. https://doi.org/10.3390/app11199267