
Publish and Subscribe-Based Formation and Containment Control of Heterogeneous Robotic System with Actuator Time Delay


Abstract
:1. Introduction
1.1. Motivation
1.2. Related Research
- the influence of the information transmission between the agents has been identified as a crucial factor in performance and reliability of the control design;
- the presence of parameters’ uncertainties and external disturbances may critically influence the performances of the prior.;
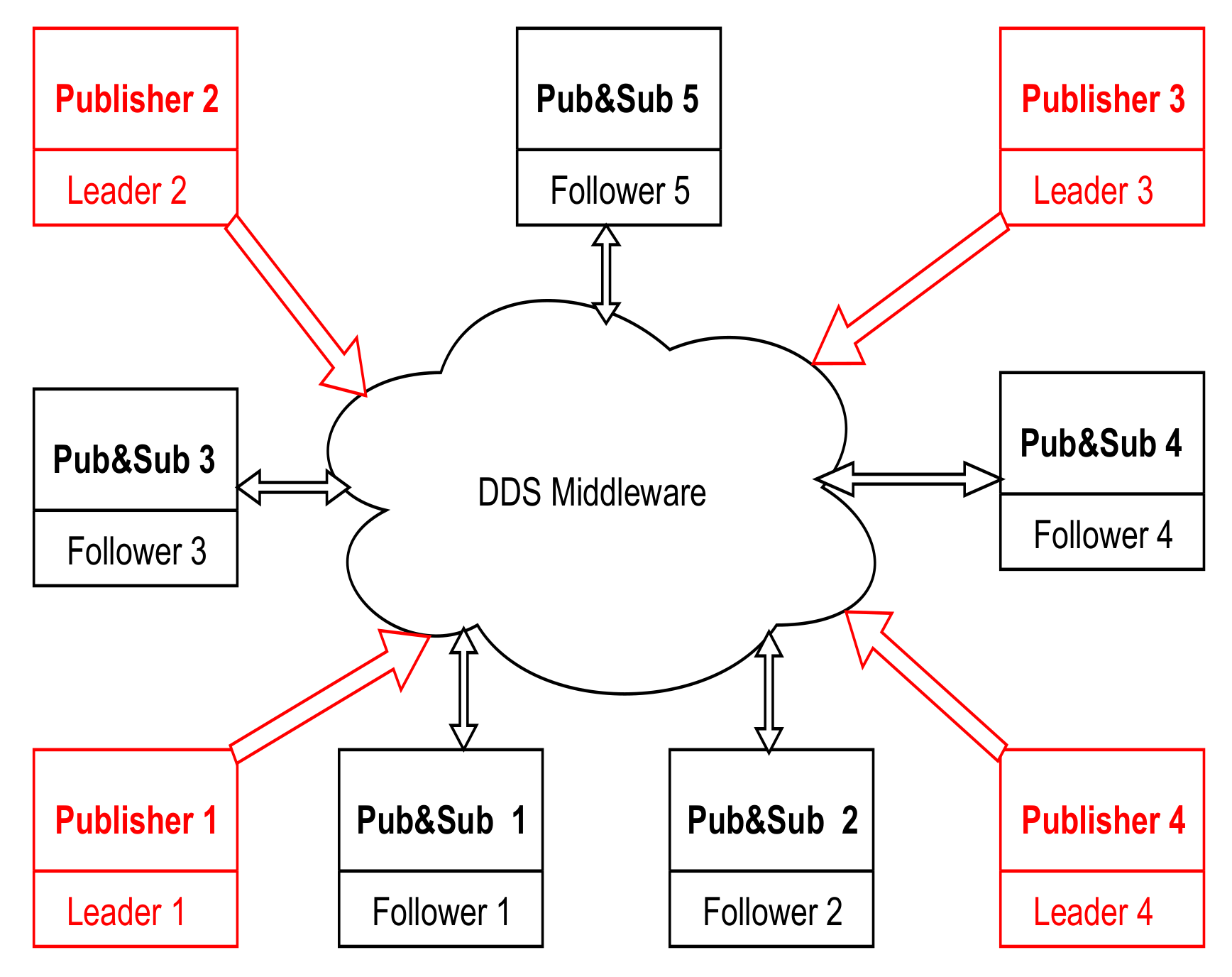
- application of the DDS middleware technique augmented with the flocking approach has not been applied for heterogeneous systems, which is closer to the real-word robotic applications.
- A robust architecture for the formation control design of heterogeneous systems has been developed.
- A robust navigation system for the containment control design of heterogeneous systems has been proposed and designed.
- The navigation algorithm avoids obstacles while still maintaining the required formation or containment.
- Reliable middleware for data transmission has been developed.
2. Preliminaries
2.1. Data Distribution Service (DDS)
- Durability: Determines whether or not the previous data sent by the publisher has been received by a new subscriber.
- Reliability: Specifies whether or not the publisher will resend information lost over the network. Reliability involves two setups: BEST EFFORT (not re-send data lost) and RELIABLE (resend data lost).
- History: Determines a publisher’s preservation of the data received or sent to a subscriber. History involves two setups: KEEP LAST and KEEP ALL.
- Ownership: Determines whether a subscriber will simultaneously accept new samples from multiple publishers. Ownership involves two setups: SHARED and EXCLUSIVE.
2.2. Dynamics of Quadrotor
2.3. Dynamics of Underwater Vehicles
3. Multiple AUVs-UAVs Control Design
3.1. L1 Adaptive Control with Actuator Time Delay
3.2. Flocking and Boids Mode
- Separation: The separation force is utilized for avoiding collision between the UAVs and AUVs, which is defined as follows:withwhere the position of agent s and agent j is represented by and respectively, n represents the agent’s number, k represents a positive constant, represents the Euclidean distance between the agent s from the agent j, the separation gain is represented by , and represents the constant distance between the agents.
- Alignment: The matching average velocity of the agents is defined as follows:where the velocity of agent j with respect to agent s is represented by and the velocity of agent j and agent s is represented by and , respectively.
- Cohesion: The cohesion force is utilized to calculate the AUVs attraction to the desired position based on the UAVs leader’s position, which is defined as follows:where the desired agent position is represented by and a constant gain is represented by .
- Obstacle Avoidance: The obstacle avoidance force is utilized for avoiding collision between the obstacles and the agents (UAVs and AUVs), which is defined as follows [34]:withwhere the position of agent j and obstacle o are represented by and , respectively, n represents the agent’s number, represents a positive constant, represents the Euclidean distance between agent j and obstacle o, the separation gain is represented by , and represents the constant distance between agent j and the obstacle o.
4. Simulation Results
4.1. Formation Control Based on L1 Adaptive Control with Actuator Time Delay
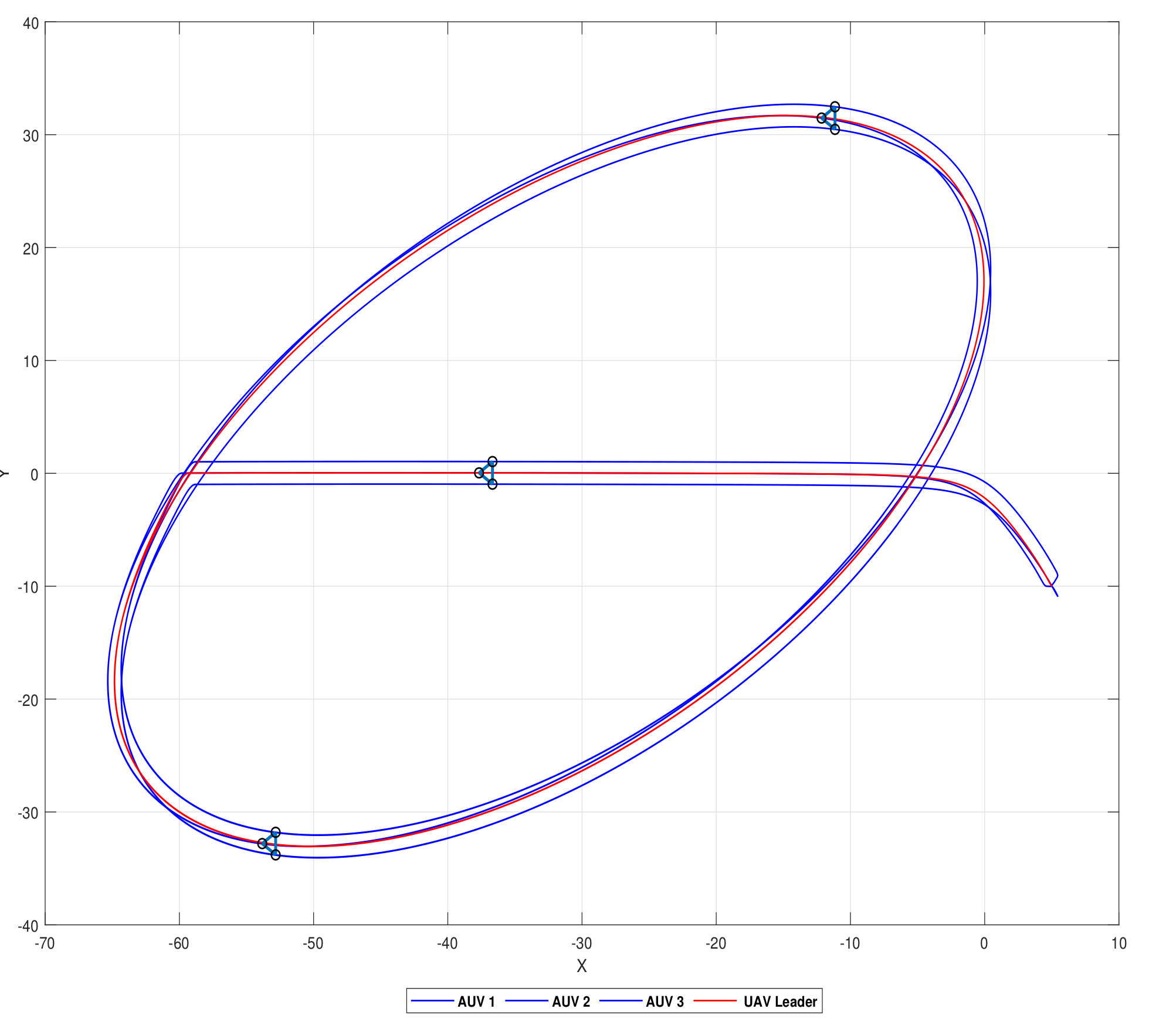
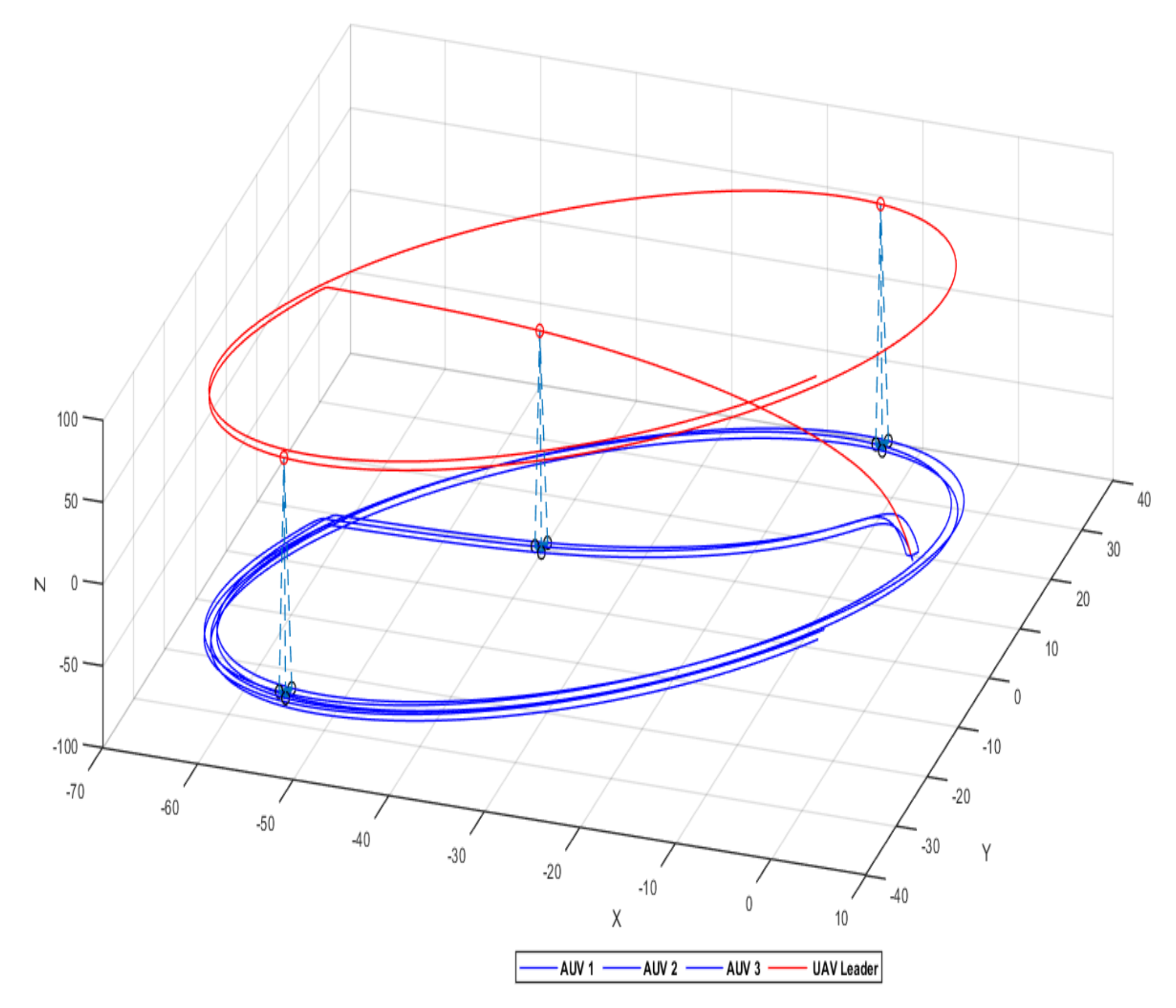
- AUVs-UAVs formation control without disturbance and uncertain parameters. Figure 2 illustrates a group of AUVs in a triangular formation tracking their UAVs leader and coordinating themselves around it in 2D space. At the same time, Figure 3 depicts the 3D space of the set of three AUVs without disturbance and uncertainty in the inertia matrix.
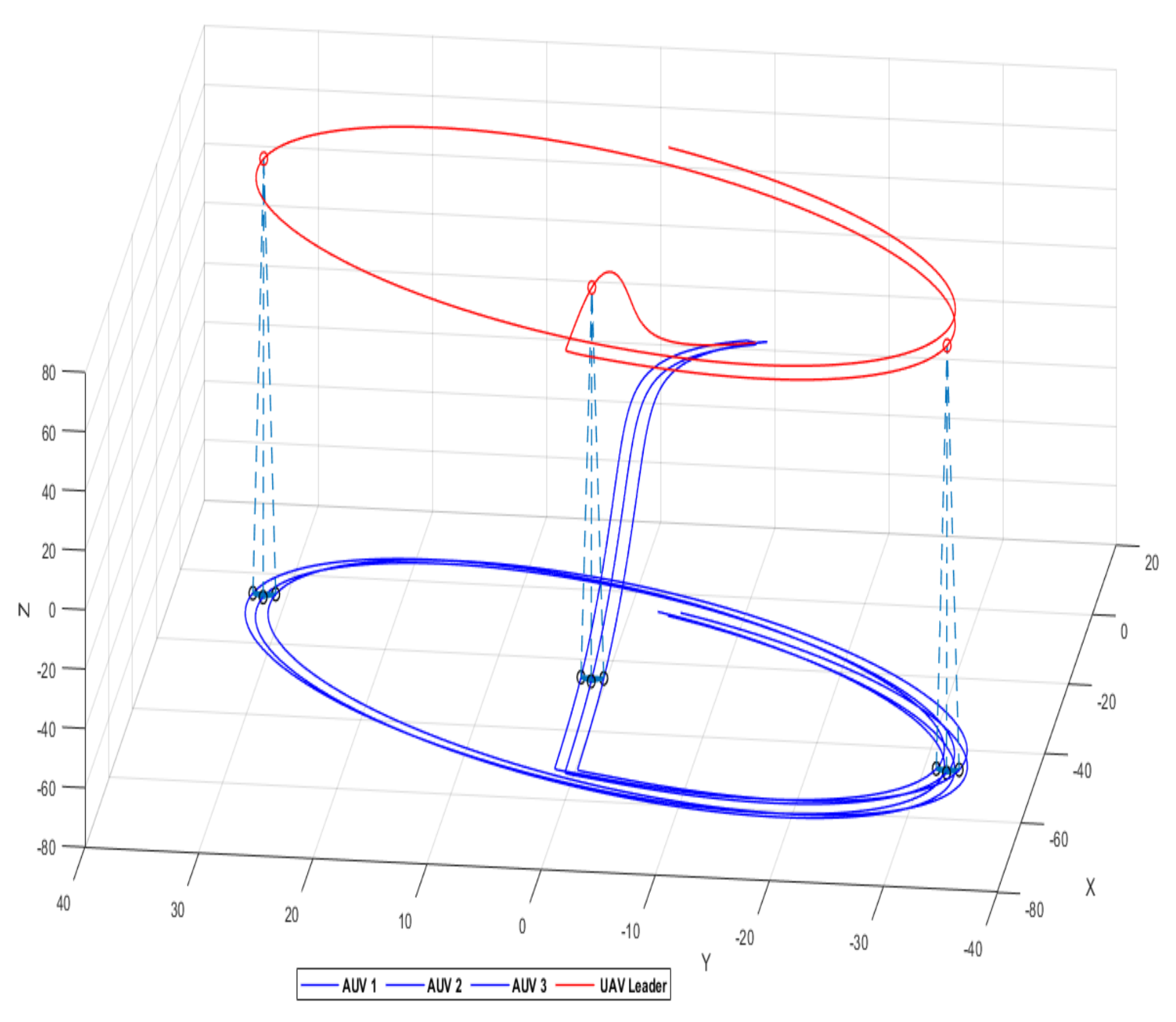
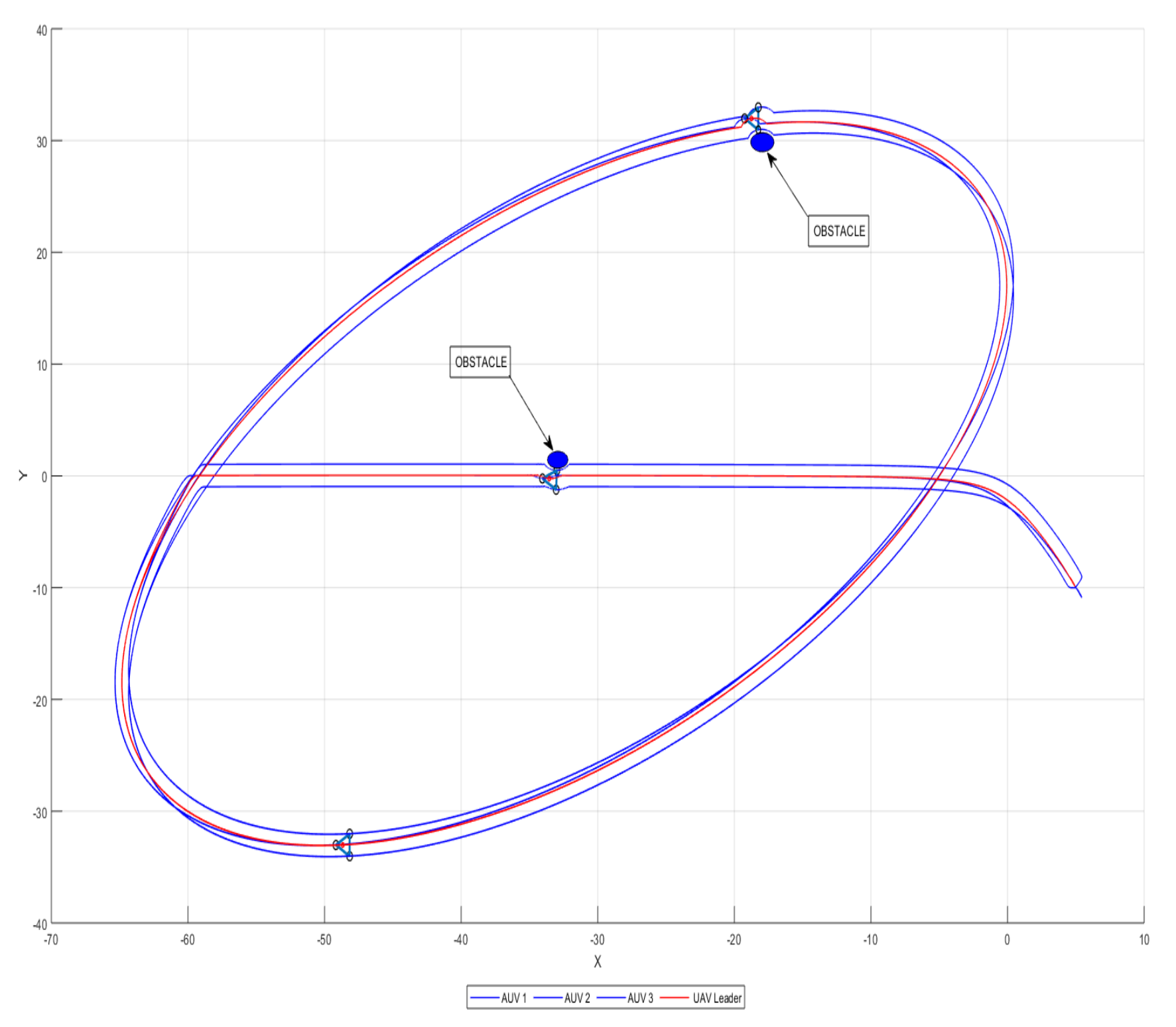
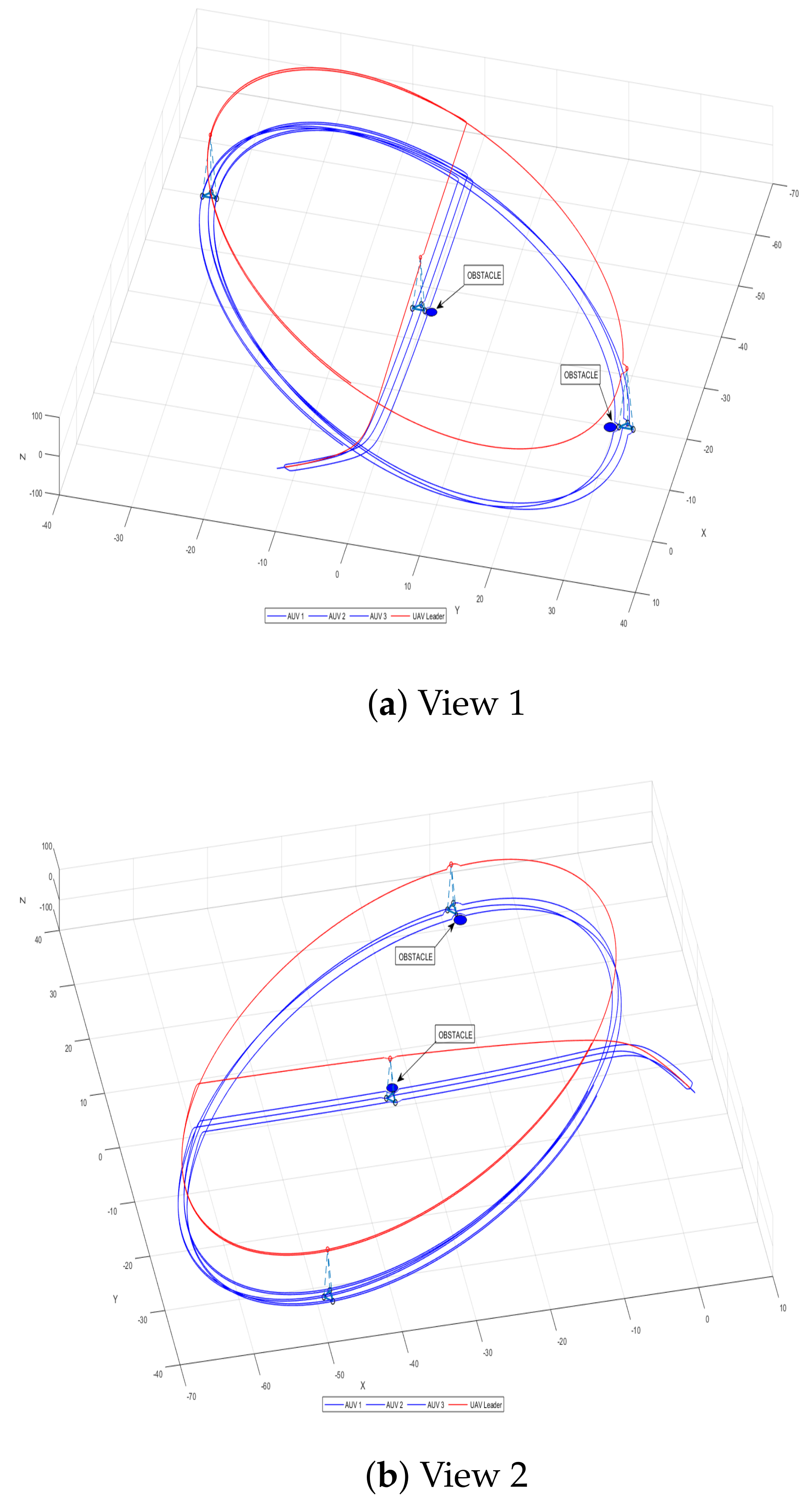
- Formation of AUVs-UAVs with disturbance and uncertainty in parameters. In Figure 2 and Figure 3, the disturbance and parameter uncertainties (water density and the inertia matrix) were not taken into account. Figure 4 and Figure 5 show the 2D space and the 3D space of the group of three AUVs with disturbance and uncertainty in water density and inertia matrix. Figure 6 and Figure 7 illustrate the formation control of three AUVs in triangular form and one UAV avoiding some obstacles during their movement in 2D and 3D space. One can observe that during this maneuver, the controller still maintains the formation.
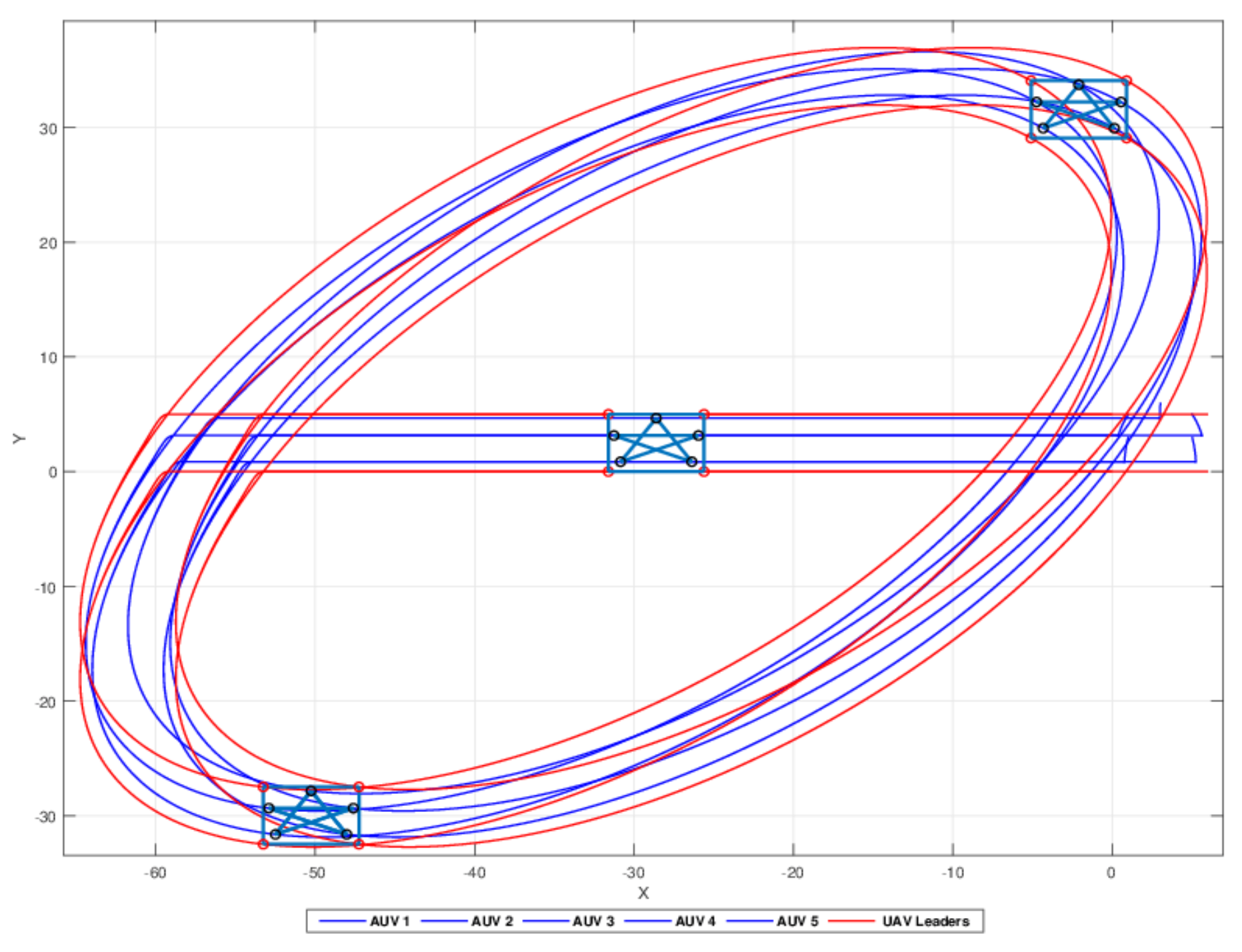
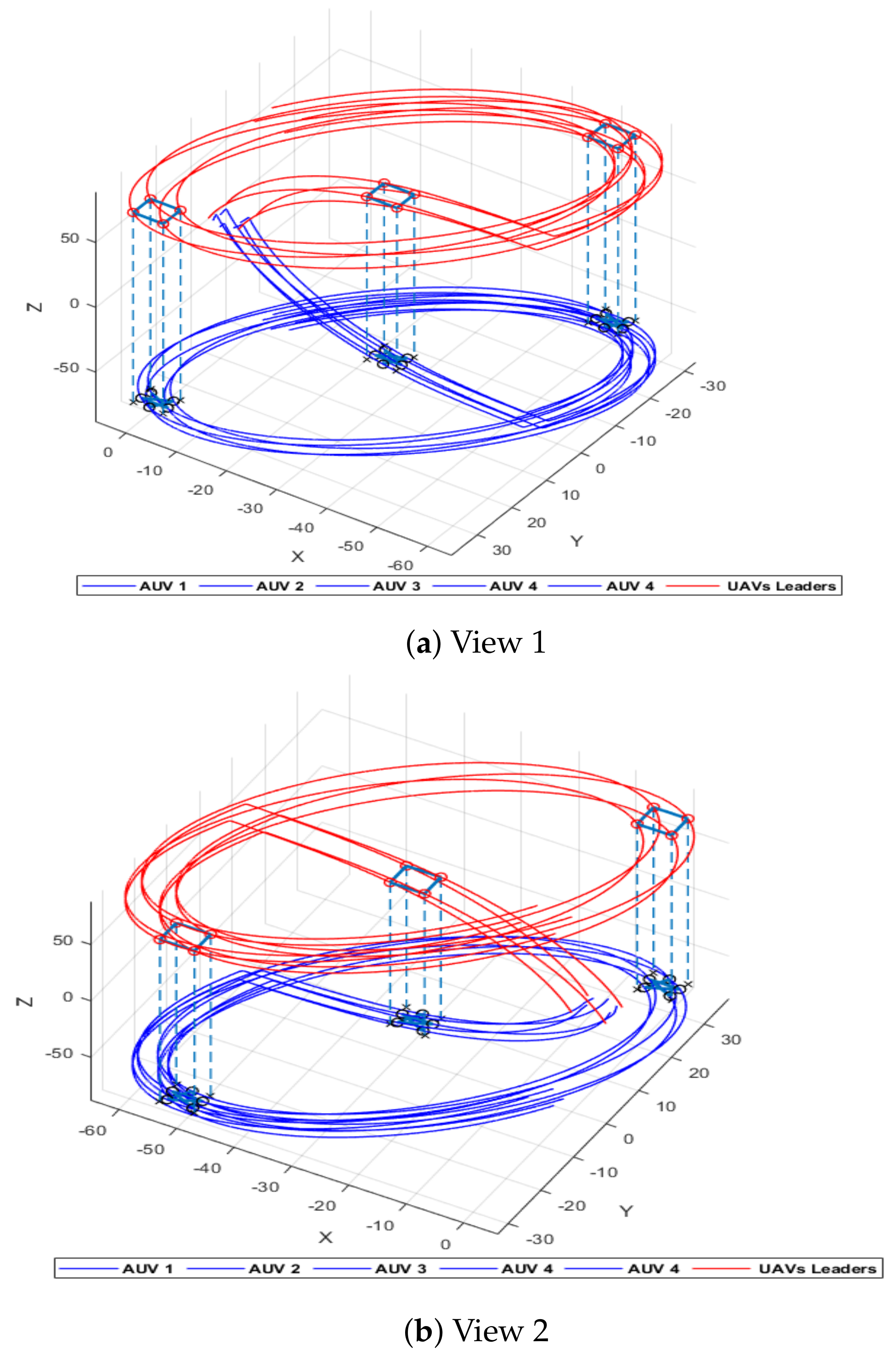
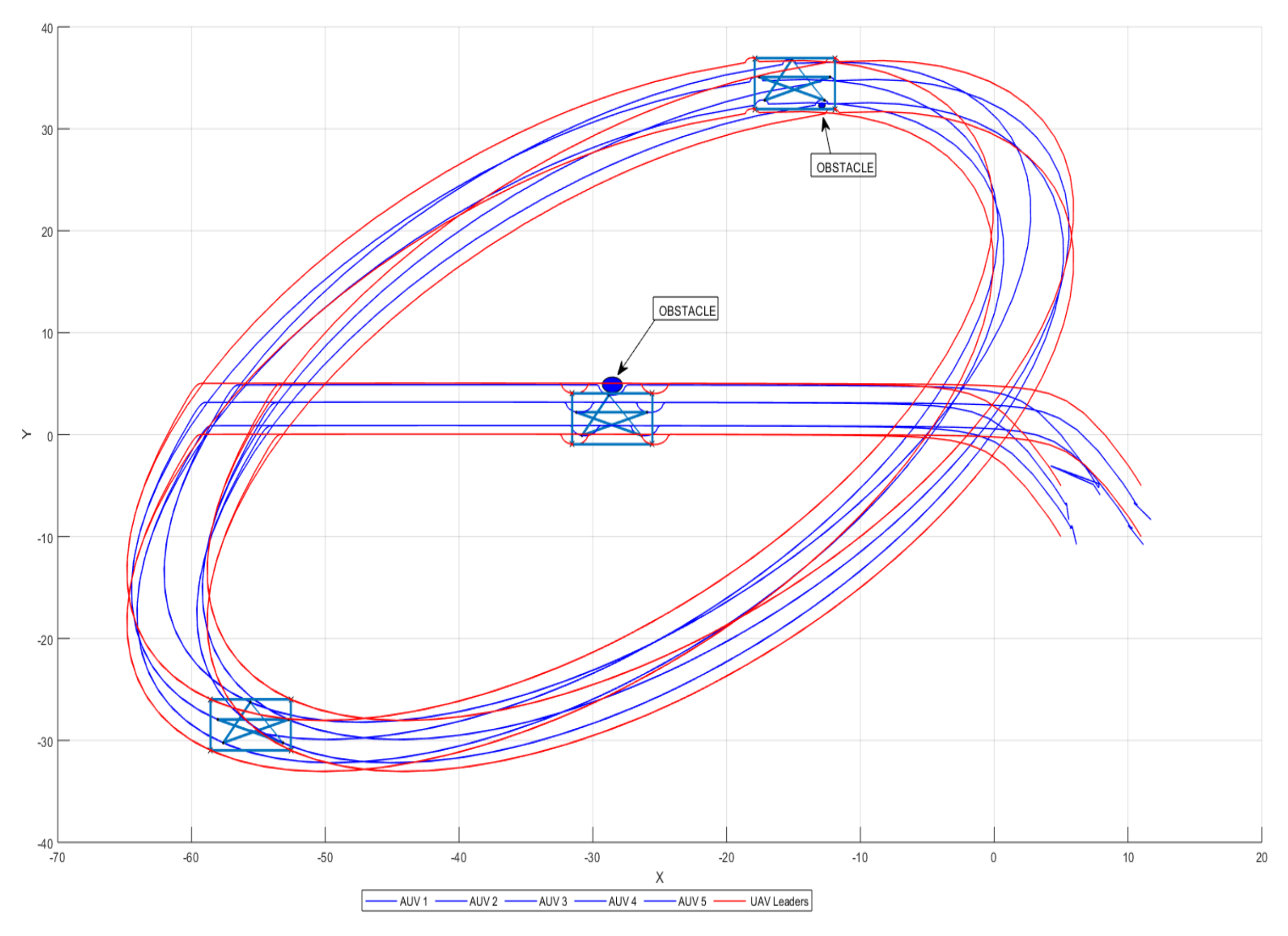
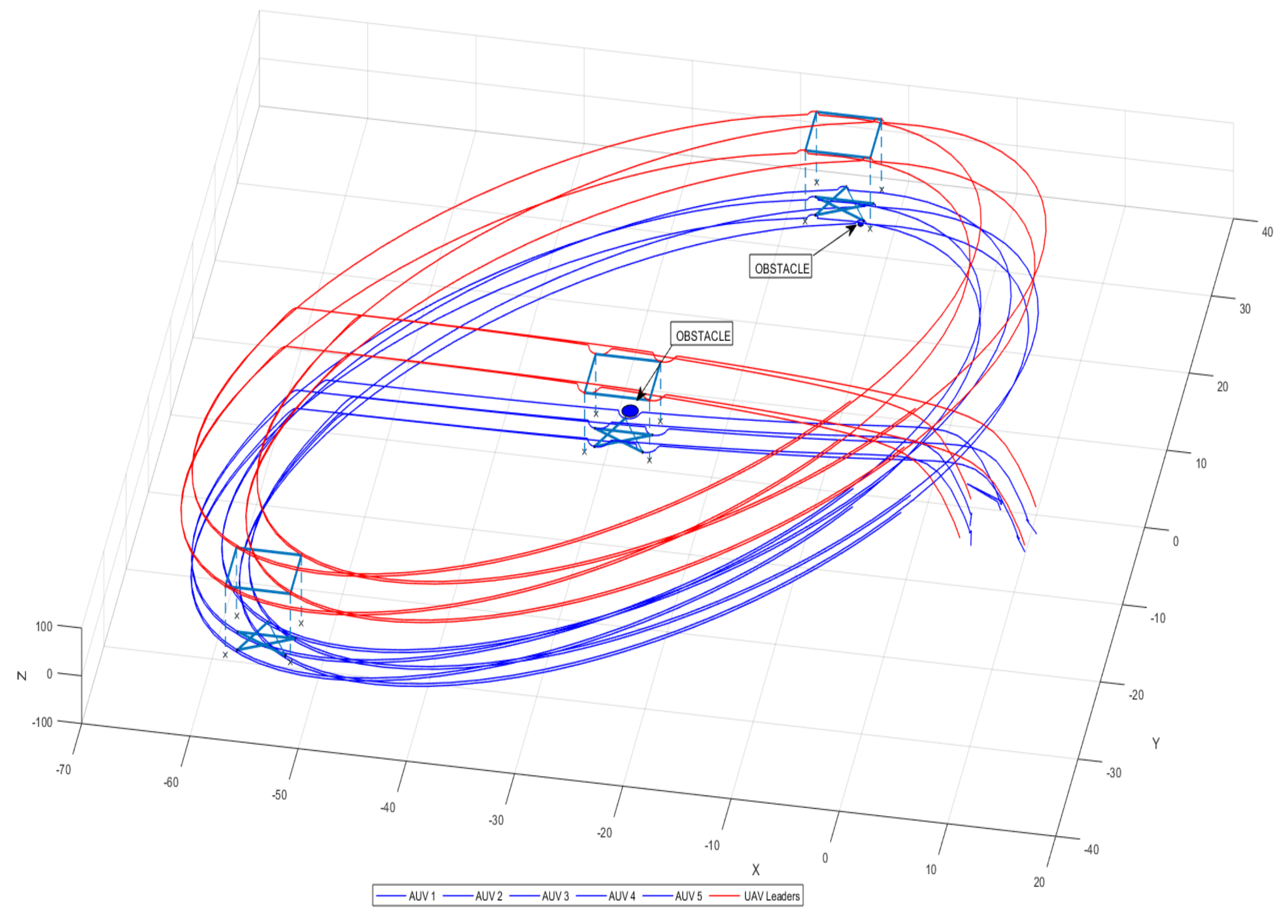
4.2. Containment Control Based on L1 Adaptive Control with Actuator Time Delay
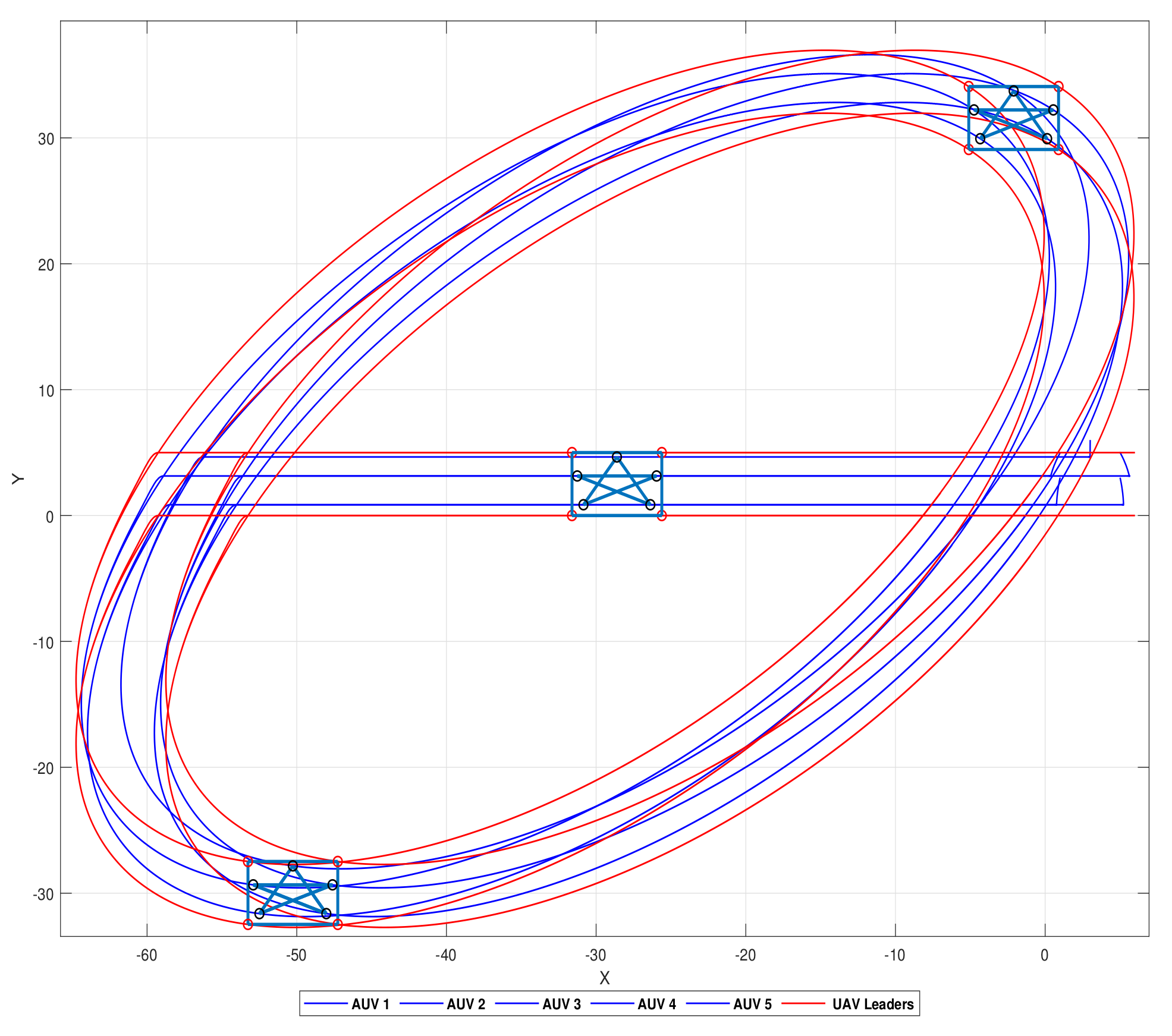
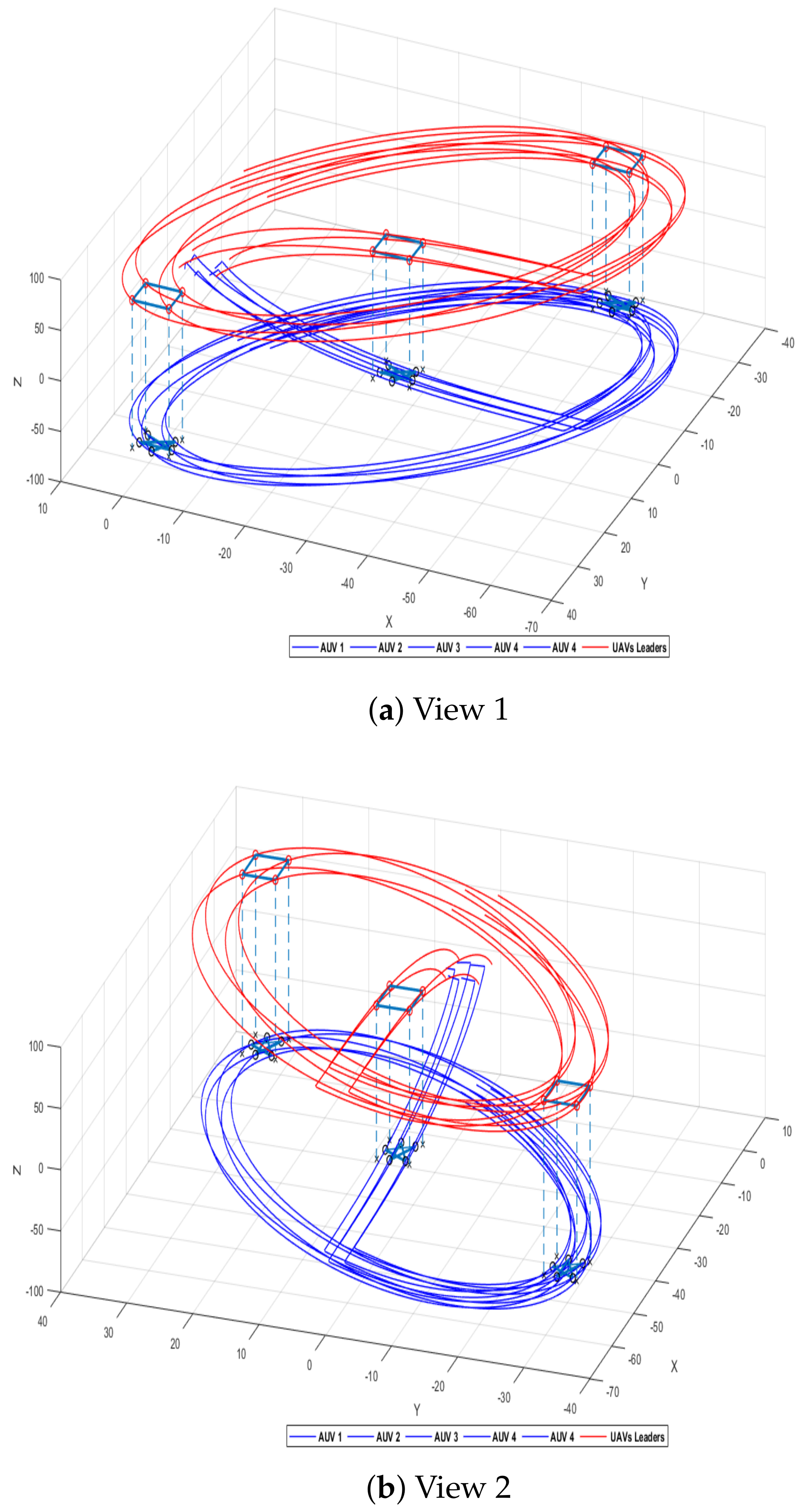
- AUVs–UAVs containment with disturbance and uncertain parameters: The disturbance and the parameter uncertainty were not considered in Figure 9 and Figure 10, but now it is considered. Figure 11 and Figure 12 show the 2D space and 3D space of the set of five AUVs with disturbance and uncertainty in water density and the inertia matrix. Figure 13 and Figure 14 illustrate the containment control of five AUVs and four UAVs avoiding some obstacles during their movement in 2D and 3D space. One can see that during this maneuver the controller maintain the containment and the formation of the followers within their leaders.
5. Results Discussion and Comparative Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Eltayeb, A.; Rahmat, M.F.; Basri, M.A.M.; Eltoum, M.A.M.; El-Ferik, S. An Improved Design of an Adaptive Sliding Mode Controller for Chattering Attenuation and Trajectory Tracking of the Quadcopter UAV. IEEE Access 2020, 8, 205968–205979. [Google Scholar] [CrossRef]
- Al-Buraiki, O.; Wu, W.; Payeur, P. Probabilistic Allocation of Specialized Robots on Targets Detected Using Deep Learning Networks. Robotics 2020, 9, 54. [Google Scholar] [CrossRef]
- Sadeghi, A.; Smith, S.L. Heterogeneous task allocation and sequencing via decentralized large neighborhood search. Unmanned Syst. 2017, 5, 79–95. [Google Scholar] [CrossRef] [Green Version]
- Zou, Y.; Meng, Z. Adaptive formation control of multiple vertical takeoff and landing UAVs. Sci. Sin. Technol. 2020, 50, 369–379. [Google Scholar]
- Peng, X.; Guo, K.; Geng, Z. Full State Tracking and Formation Control for Under-Actuated VTOL UAVs. IEEE Access 2019, 7, 3755–3766. [Google Scholar] [CrossRef]
- Muhamad, F.; Djati, D. Full-State Feedback Control Design for Shape Formation using Linear Quadratic Regulator. Indones. J. Comput. Eng. Des. (IJoCED) 2020, 2, 83–90. [Google Scholar]
- Ghanem, P.; Wolek, A.; Paleyv, D.A. Planar Formation Control of a School of Robotic Fish. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; pp. 1653–1658. [Google Scholar]
- El-Ferik, S.; Almadani, B.; Elkhider, S.M. Formation Control of Multi Unmanned Aerial Vehicle Systems Based on DDS Middleware. IEEE Access 2020, 8, 44211–44218. [Google Scholar] [CrossRef]
- AL-Madani, B.; Elkhider, S.M.; El-Ferik, S. DDS-Based Containment Control of Multiple UAV Systems. Appl. Sci. 2020, 10, 4572. [Google Scholar] [CrossRef]
- Ghasemi, K.; Ghaisari, J.; Abdollahi, F. Robust formation control of multiagent systems on the Lie group SE(3). Int. J. Robust Nonlinear Control 2020, 30, 966–998. [Google Scholar] [CrossRef]
- Beard, R.; Lawton, J.; Hadaegh, F. A coordination architecture for spacecraft formation control. IEEE Trans. Control. Syst. Technol. 2001, 9, 777–790. [Google Scholar] [CrossRef] [Green Version]
- Tariq Nasir, M.; El-Ferik, S. Adaptive sliding-mode cluster space control of a non-holonomic multi-robot system with applications. IET Control Theory Appl. 2017, 11, 1264–1273. [Google Scholar] [CrossRef]
- Chen, L.; Mei, J.; Li, C.; Ma, G. Distributed Leader-follower Affine Formation Maneuver Control for High-order Multi-agent Systems. IEEE Trans. Autom. Control 2020, 65, 4941–4948. [Google Scholar] [CrossRef]
- Garratt, V.P.T.M.; Petersen, I.R. Switching time-invariant formation control of a collaborative multi-agent system using negative imaginary systems theory. Control Eng. Pract. 2020, 95, 104245. [Google Scholar]
- El Ferik, S.; Nasir, M.T.; Baroudi, U. A Behavioral Adaptive Fuzzy controller of multi robots in a cluster space. Appl. Soft Comput. 2016, 44, 117–127. [Google Scholar] [CrossRef]
- Jia, R.; Yue, M.; Xu, Y. Adaptive Leader-Follower Formation Control of Wheeled Mobile Robots via Composite Techniques. In Proceedings of the 8th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, Tianjin, China, 19–23 July 2018; pp. 729–734. [Google Scholar] [CrossRef]
- Al-Buraiki, O.; Ferik, S.E. Robotic Leader-Follower Navigation and Fleet Management Control Method. U.S. Patent 9,146,561, 29 September 2015. [Google Scholar]
- Al-Buraiki, O. Leader Follower Slam Based Navigation and Fleet Management Control. Master’s Thesis, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia, 2013. [Google Scholar]
- Tsai, C.F.T.; Feng, K. Fuzzy Sliding-Mode Consensus Formation Control of Networked Heterogeneous Mecanum-Wheeled Multi-Robots with Dynamic Effects. In Proceedings of the 2018 IEEE International Conference on Fuzzy Systems, Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–7. [Google Scholar]
- Ren, S.; Chen, Y.; Xiong, L.; Chen, Z.; Chen, M. Path Planning for the Marsupial double-UAVs System in Air-ground Collaborative Application. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 5420–5425. [Google Scholar]
- Dong, X.; Yuan, C.; Stegagno, P.; Zeng, W.; Wang, C. Composite cooperative synchronization and decentralized learning of multi-robot manipulators with heterogeneous nonlinear uncertain dynamics. J. Frankl. Inst. 2019, 356, 5049–5072. [Google Scholar] [CrossRef]
- D’Urso, F.; Santoro, C.; Santoro, F.F. An integrated framework for the realistic simulation of multi-UAV applications R. Comput. Electr. Eng. 2019, 74, 196–209. [Google Scholar] [CrossRef]
- Gobillot, N.; Lesire, C.; Doose, D. A Design and Analysis Methodology for Component-Based Real-Time Architectures of Autonomous Systems. J. Intell. Robot. Syst. 2019, 96, 123–138. [Google Scholar] [CrossRef] [Green Version]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. A Multi-Agent Framework for Autonomous Underwater Vehicles for Mine Countermeasures with MOOS-IvP. 2011, pp. 1–10. Available online: https://people.csail.mit.edu/lpaull/publications/Paull_AIS_2011.pdf (accessed on 25 September 2021).
- Koesdwiady, A.B. Immersion and Invariance Control Design for Unmanned Aerial Vehicle. Master’s Thesis, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia, 2013. [Google Scholar]
- Tayeb, A. L1 Adaptive Controller for Underwater Vehicle-Manipulator Systems. Master’s Thesis, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia, 2013. [Google Scholar]
- Hovakimyan, N.; Cao, C. L1 Adaptive Control Theory: Guaranteed Robustness with Fast Adaptation; Society for Industrial and Applied Mathematics: Philedelphia, PA, USA, 2010; Volume 21. [Google Scholar]
- Elahidoost, A.; Cao, C. Control and navigation of a three wheeled unmanned ground vehicle by L1 adaptive control architecture. In Proceedings of the IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 23–24 April 2012; pp. 13–18. [Google Scholar]
- Cao, C.; Hovakimyan, N. Stability Margins of L1 Adaptive Controller: Part II. In Proceedings of the American Control Conference (ACC’07), New York, NY, USA, 9–13 July 2007; pp. 3931–3936. [Google Scholar]
- Maalouf, D.; Creuze, V.; Chemori, A. Novel Application of Multivariable L1 Adaptive Control: From Design to Real-Time Implementation on an Underwater Vehicle. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 76–81. [Google Scholar]
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim, CA, USA, 1 January 1987; Volume 21, pp. 25–34. [Google Scholar] [CrossRef] [Green Version]
- Lewis, F.; Zhang, H.; Das, A. Cooperative Control of Multi-Agent Systems. Optimal and Adaptive Design Approaches; Springer Science & Business Media: London, UK, 2014. [Google Scholar]
- Hartman, C.; Benes, B. Autonomous boids. Comput. Animat. Virtual Worlds 2006, 17, 199–206. [Google Scholar] [CrossRef]
- El-Ferik, S. Biologically Based Control of a Fleet of Unmanned Aerial Vehicles Facing Multiple Threats. IEEE Access 2020, 8, 107146–107160. [Google Scholar] [CrossRef]
- Huang, Y.; Tang, J.; Lao, S. Collision Avoidance Method for Self-Organizing Unmanned Aerial Vehicle Flights. IEEE Access 2019, 7, 85536–85547. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| For the UAV | |
| the vector representing z, y, and x coordinates. | |
| the vector of Euler angles yaw (), pitch (), and roll (). | |
| g | represents the gravity acceleration. |
| m | represents the mass. |
| is the drag coefficient. | |
| u | is the total thrust force input created by the 4 propellers. |
| represents the quadrotor’s inertia. | |
| is the angular velocity. | |
| is equal to . | |
| represents the propeller inertia. | |
| represent the rotational drag. | |
| × | is the cross product. |
| For the AUV | |
| is the inertia matrix. | |
| is the coriolis matrix. | |
| is the damping matrix. | |
| is the gravitational vector. | |
| is the input control signals. | |
| is the rigid body’s inertia matrix. | |
| represents the additional momentum and forces. | |
| is the gravity vector. | |
| is the 3-by-3 identity matrix. | |
| is the inertia tensor. |
| Properties | Unit | Value |
|---|---|---|
| Mass | m | 0.52 kg |
| Gravity Acceleration | g | 9.8 m/s |
| Drag’s Translational | ||
| Drag’s Rotational | ||
| Ratio of Drag & Thrust | d | 7.5 × 10 kg × m |
| Inertia of x-axis | 0.0069 kg × m | |
| Inertia of y-axis | 0.0069 kg × m | |
| Inertia of z-axis | 0.0129 kg × m | |
| Arm Length | L | 0.205 m |
| Propeller Inertia | kg × m |
| Properties | Value |
|---|---|
| Length | 1.5 m |
| Diameter | 20 cm |
| Weight in air | 32 kg |
| Depth rating | 100 m |
| Propulsion | 2 horizontal + 2 vertical thrusters |
| Horizontal velocity | 0–1.5 m/s, variable |
| Energy | Li-Ion batteries, 600 Wh |
| Autonomy/Range | about 10 h/40 km |
| Properties | Value [] |
|---|---|
| Properties | Value | Unit |
|---|---|---|
| −1.74 | kg | |
| kg | ||
| −4.12 × 10 | kg | |
| kg × m | ||
| −6.07 | kg × m | |
| −6.40 | kg × m | |
| kg × m | ||
| kg × m | ||
| kg × m | ||
| kg × m | ||
| kg × m | ||
| kg × m | ||
| kg × m | ||
| kg × m |
| QoS Policies | QoS Value |
|---|---|
| Publisher/Subscriber | |
| Durability | Volatile |
| Reliability | Reliable |
| History | Keep All |
| Ownership | Shared |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elkhider, S.M.; Al-Buraiki, O.; El-Ferik, S. Publish and Subscribe-Based Formation and Containment Control of Heterogeneous Robotic System with Actuator Time Delay. Appl. Sci. 2021, 11, 9145. https://doi.org/10.3390/app11199145
Elkhider SM, Al-Buraiki O, El-Ferik S. Publish and Subscribe-Based Formation and Containment Control of Heterogeneous Robotic System with Actuator Time Delay. Applied Sciences. 2021; 11(19):9145. https://doi.org/10.3390/app11199145
Chicago/Turabian StyleElkhider, Siddig M., Omar Al-Buraiki, and Sami El-Ferik. 2021. "Publish and Subscribe-Based Formation and Containment Control of Heterogeneous Robotic System with Actuator Time Delay" Applied Sciences 11, no. 19: 9145. https://doi.org/10.3390/app11199145
APA StyleElkhider, S. M., Al-Buraiki, O., & El-Ferik, S. (2021). Publish and Subscribe-Based Formation and Containment Control of Heterogeneous Robotic System with Actuator Time Delay. Applied Sciences, 11(19), 9145. https://doi.org/10.3390/app11199145