
Sensitivity Analysis of Reliability of Low-Mobility Parallel Mechanisms Based on a Response Surface Method

Abstract
1. Introduction
2. Response Surface Method
3. Kinematics Analysis
3.1. Mechanism Description and Coordinate System
3.2. Inverse Kinematics
4. Error Modeling
4.1. Geometric Parameters Errors
4.2. Clearance Errors of Revolute Joints
4.3. Driving Errors
5. Kinematic Reliability Analysis
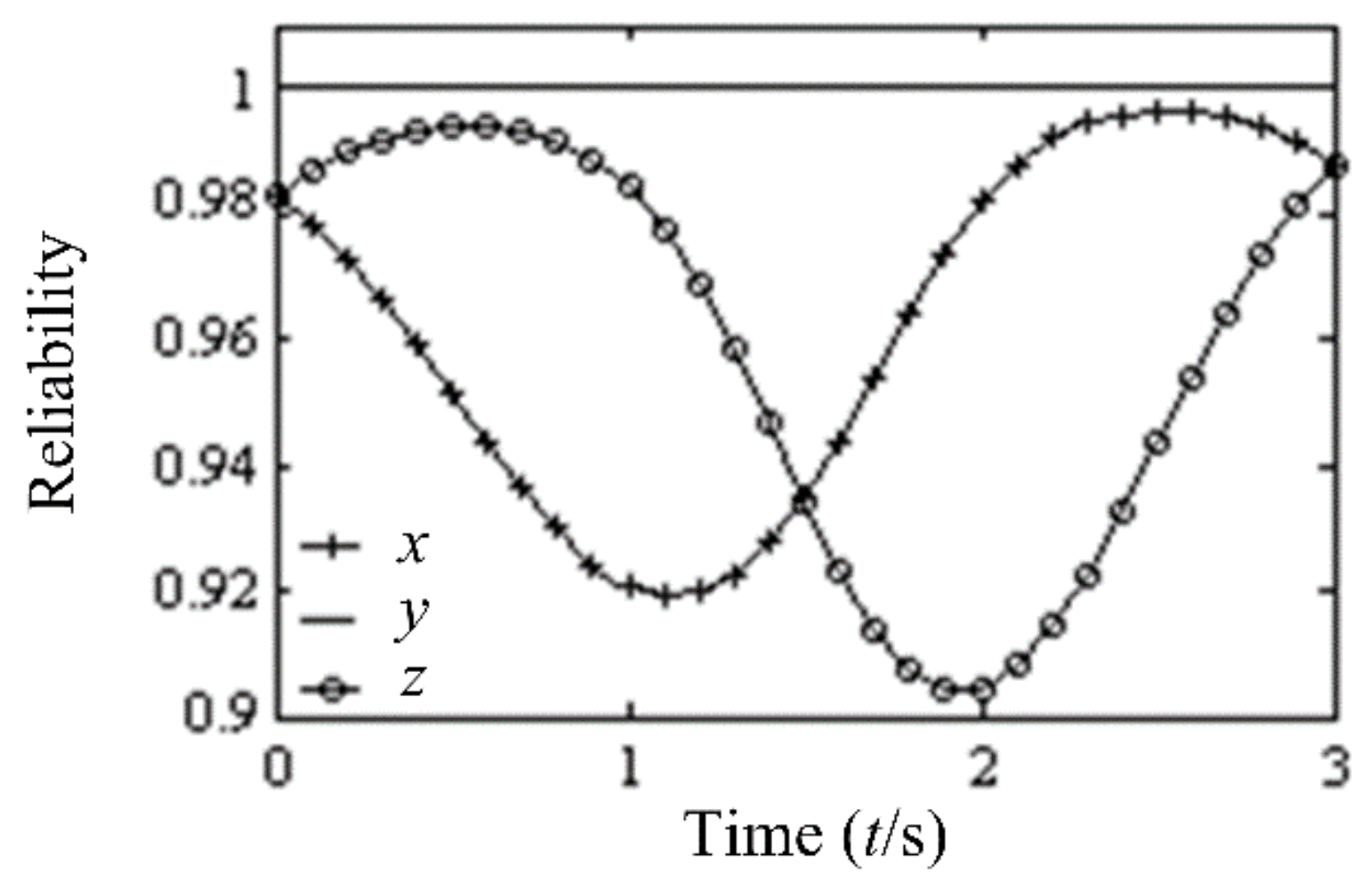
- Assume that the geometric parameters errors, the clearance errors of revolute joints, and the driving errors (at any time) are independent of each other and that each error has a normal distribution. From Equation (18), the position errors of the robot end-effector obey the normal distribution in the x, y, and z directions at any time. The mean and standard deviation are shown as Equations (19) and (20).where: are the mean and standard deviation of each original input error respectively.
- 2.
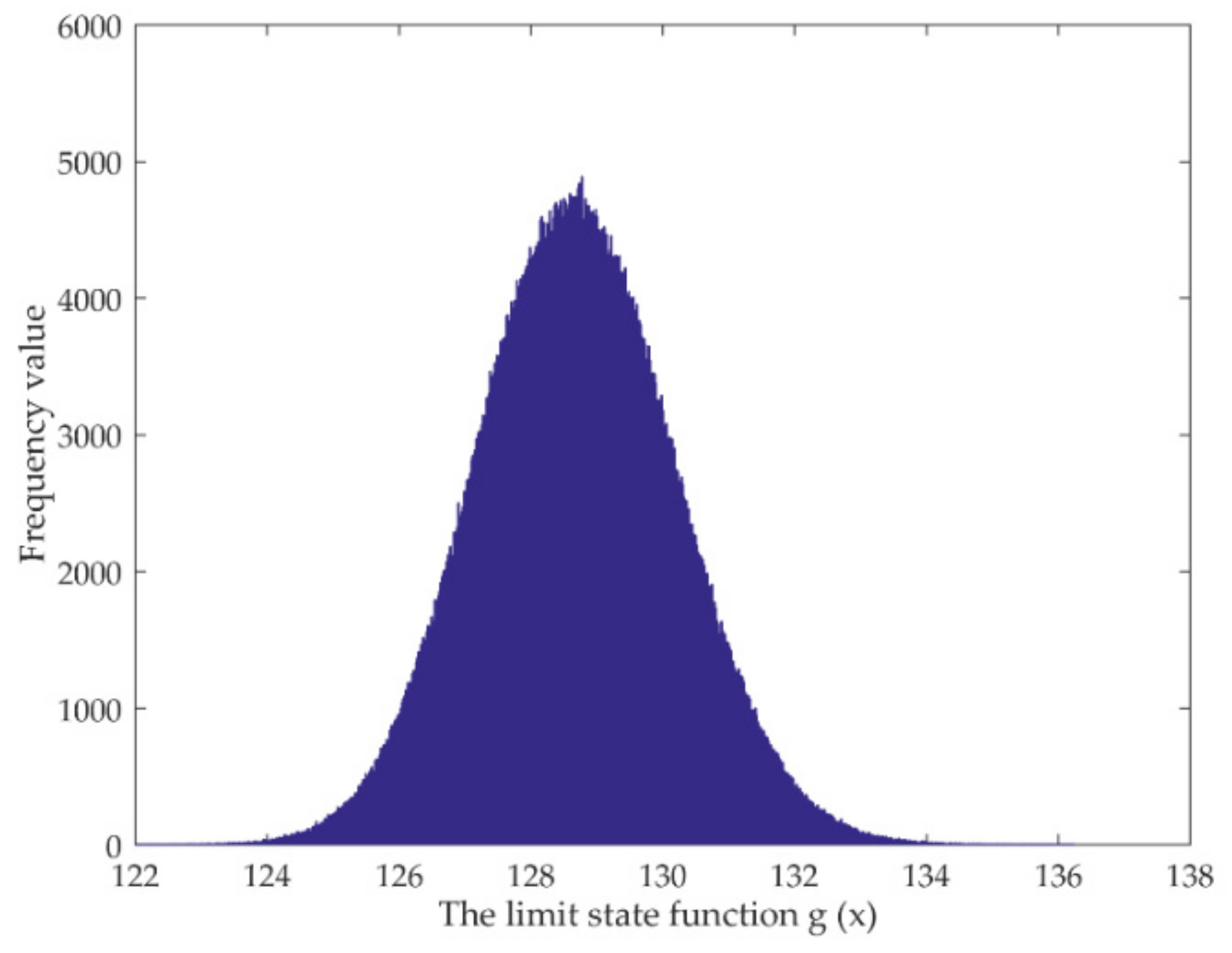
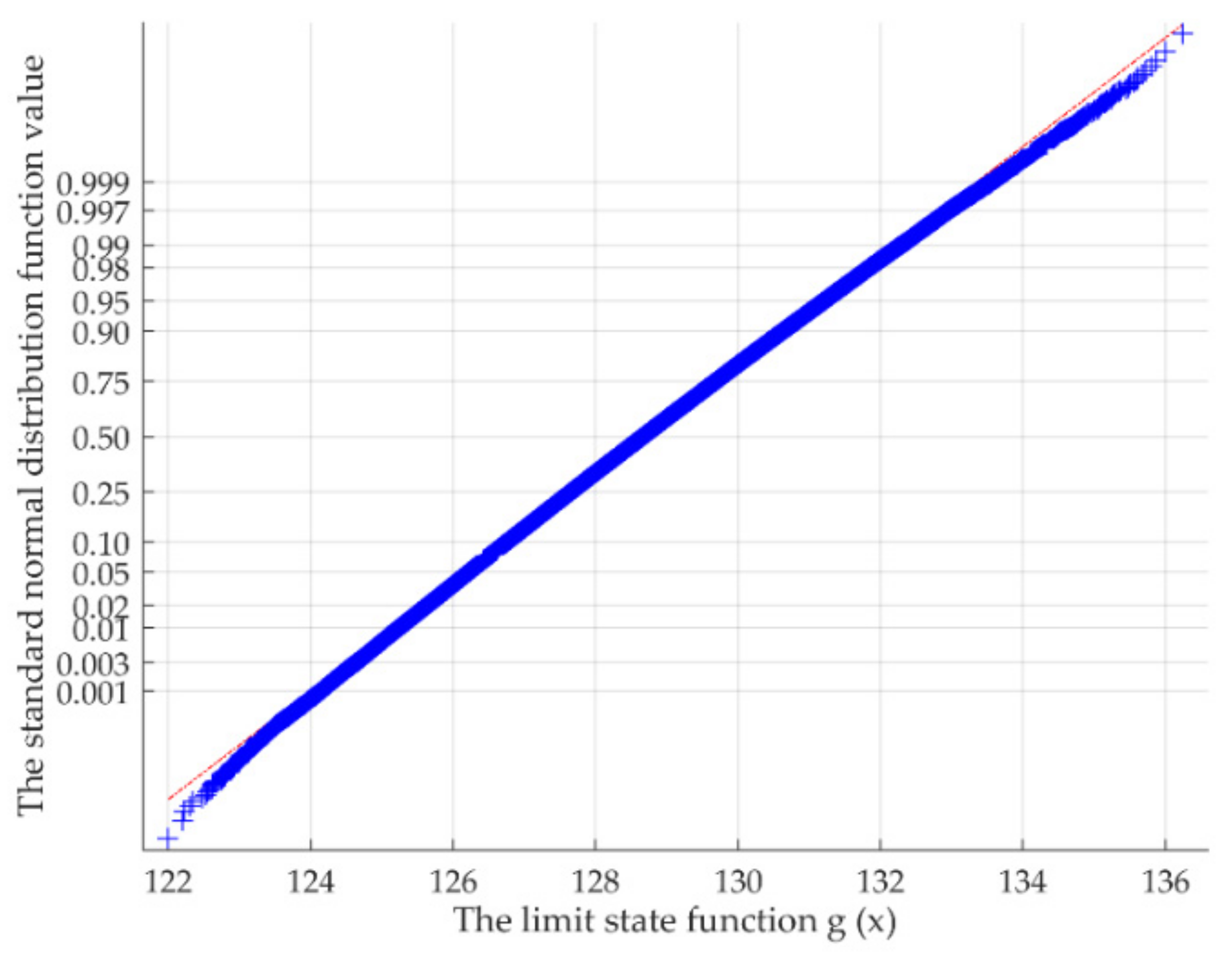
- It is assumed that the discrete distribution data (or the distribution law) of each original input error is known. According to the Monte Carlo method, assign a value for random variable in the error source. Then a sampled value of Δq or f(S) can be obtained from Equation (18) or Equation (22). The multiple sampled values then used to create a frequency histogram. Furthermore, parameter estimation and hypothesis testing of the distribution type of Δq or f(S) are now completed. As such, the kinematic reliability of the mechanism in the x, y, z directions or in the combined direction based on the distribution function can now be calculated.
6. Sensitivity Analysis of Kinematic Reliability
6.1. Formulate the Limit State Function of the Position Errors in the Combined Direction Based on Response Surface Method
6.2. Kinematic Reliability of the Mechanism in the Combined Direction
6.3. Reliability Sensitivity Analysis
7. Numerical Examples
- 1.
- Increasing the means of and will decrease the kinematic reliability of the mechanism, while the increase of the mean of the other errors will increase the kinematic reliability. The reliability of the improved Delta parallel mechanism with respect to the mean of the input errors is more sensitive to the changes in μΔa2, μΔr32, and μΔa1 than to the changes in μΔa3, with the mean sensitivities of the other errors being smaller. The mean sensitivity of the length error of the second driving arm is the largest, meaning the reliability could be improved to some extent by controlling the mean of Δa2.
- 2.
- The increase of the mean of the input errors does not wholly decrease the kinematic reliability of the mechanism, which indicates that the output position errors of the end-effector of the improved Delta parallel mechanism are caused by the coupling errors of each branch, and even the influences of the same kind of errors on kinematic reliability are also different because of the arrangements of the three branches.
- 1.
- The increase in the variances of all the random parameters will decrease the kinematic reliability of the parallel mechanism. Therefore, in order to increase kinematic reliability of the improved Delta parallel mechanism, some effective measures could be taken to minimize the variances of the input errors of all the design variables at a reasonable cost controlled during processing and manufacturing.
- 2.
- We can also learn that the variance reliability of kinematic accuracy of the improved Delta parallel mechanism is more sensitive to Δa2, Δa1, Δφ3 and Δa3 and followed by Δφ1, Δr22, Δr12, Δr32 and Δφ2. The variance sensitivity of the length errors of the second driving arm is the largest, and the average of variance sensitivity of Δai (i = 1, 2, 3) is equal to 62.6326 which is much larger than any other variance sensitivity. The increase in variances of driving arms have the most serious influence on the kinematic reliability. Therefore, the discreteness of length errors of the driving arms should be strictly controlled during machining and assembling to obtain desired kinematic reliability of the improved Delta parallel mechanism.
8. Conclusions
- 1.
- The kinematic reliability of the improved Delta parallel mechanism has the strongest sensitivity to the mean of , followed by , and ; while the mean sensitivities of other errors are comparatively small.
- 2.
- The mean increase in each input error component does not wholly decrease the reliability of the mechanism, which indicates that the output positioning errors of the end-effector of the parallel mechanisms are caused by the coupling errors of each parallel branch. The increase in the variance of all the random variables reduces the kinematic reliability.
- 3.
- Among all the input errors, the variance sensitivity to the length errors of the driving arms are the largest, which indicates that the increase in variance mostly decreases kinematic reliability of the improved Delta mechanism.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
| Sampling Point | Level | Δr12/mm | Level | Δr22/mm | Level | Δr32/mm | Level | Δα12/mm | Level | Δα22/mm | Level | Δα32/mm | Level | Δφ12/mm | Level | Δφ22/mm | Level | Δφ32/mm | Level | Δθ12/mm | Level | Δθ22/mm | Level | Δθ32/mm | Type | Response Value |
| 1 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | Central | 0.6490 |
| 2 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.8003 | |
| 3 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4538 | |
| 4 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4324 | |
| 5 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.8253 | |
| 6 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.1332 | |
| 7 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.1734 | |
| 8 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3909 | |
| 9 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.8314 | |
| 10 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.8304 | |
| 11 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.0605 | |
| 12 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3993 | |
| 13 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.5269 | |
| 14 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.0835 | |
| 15 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4168 | |
| 16 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4359 | |
| 17 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4468 | |
| 18 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3063 | |
| 19 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.5085 | |
| 20 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.5108 | |
| 21 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.8176 | |
| 22 | P2 | 0.02 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.7948 | |
| 23 | P2 | 0.02 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.6443 | |
| 24 | P2 | 0.02 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3786 | |
| 25 | P2 | 0.02 | P3 | 0.0433 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.8116 | |
| 26 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.5328 | |
| 27 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3507 | |
| 28 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.9390 | |
| 29 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.8759 | |
| 30 | P2 | 0.02 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.5502 | |
| 31 | P2 | 0.02 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.6569 | |
| 32 | P2 | 0.02 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.6280 | |
| 33 | P2 | 0.02 | P1 | −0.0033 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.2920 | |
| 34 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4317 | |
| 35 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.0155 | |
| 36 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.1672 | |
| 37 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.1062 | |
| 38 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3724 | |
| 39 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.1981 | |
| 40 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4897 | |
| 41 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3395 | |
| 42 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.9516 | |
| 43 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.9203 | |
| 44 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.0527 | |
| 45 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.6225 | |
| 46 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.5870 | |
| 47 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.2077 | |
| 48 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.3012 | |
| 49 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P2 | 0.03 | 0.4709 | |
| 50 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.2305 | |
| 51 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.8443 | |
| 52 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.1948 | |
| 53 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.2259 | |
| 54 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.1707 | |
| 55 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.2277 | |
| 56 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.4357 | |
| 57 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.3111 | |
| 58 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.9234 | |
| 59 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.4302 | |
| 60 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.7379 | |
| 61 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.2691 | |
| 62 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.4228 | |
| 63 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.5479 | |
| 64 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.9427 | |
| 65 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.4177 | |
| 66 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.9831 | |
| 67 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.3015 | |
| 68 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.7011 | |
| 69 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.6663 | |
| 70 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.5391 | |
| 71 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.6981 | |
| 72 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.6665 | |
| 73 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.1781 | |
| 74 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.128 | |
| 75 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.1848 | |
| 76 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.9049 | |
| 77 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.9797 | |
| 78 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.4389 | |
| 79 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.1111 | |
| 80 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P3 | 0.3026 | P2 | 0.03 | 0.2581 | |
| 81 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P2 | 0.03 | P1 | −0.2426 | P2 | 0.03 | 0.4087 | |
| 82 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P3 | 0.3026 | 0.5949 | |
| 83 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P1 | −0.2426 | 0.2622 | |
| 84 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P3 | 0.3026 | 0.6028 | |
| 85 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P1 | −0.2426 | 0.7112 | |
| 86 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P3 | 0.3026 | 0.2217 | |
| 87 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P1 | −0.2426 | 0.1174 | |
| 88 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P3 | 0.3026 | 0.2967 | |
| 89 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P3 | 0.0756 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P1 | −0.2426 | 0.3188 | |
| 90 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P3 | 0.3026 | 0.4283 | |
| 91 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P1 | −0.2426 | 0.4820 | |
| 92 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P3 | 0.3026 | 0.1206 | |
| 93 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P3 | 0.1233 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P1 | −0.2426 | 0.5895 | |
| 94 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P3 | 0.3026 | 0.2262 | |
| 95 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P1 | −0.2426 | 0.3846 | |
| 96 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P3 | 0.3026 | 0.5830 | |
| 97 | P2 | 0.02 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0444 | P1 | 0.0767 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P1 | −0.2426 | 0.2518 | |
| 98 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.2904 | |
| 99 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.6171 | |
| 100 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.2653 | |
| 101 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.8244 | |
| 102 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.9827 | |
| 103 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.7302 | |
| 104 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.3439 | |
| 105 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.2316 | |
| 106 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.4889 | |
| 107 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.6241 | |
| 108 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.6791 | |
| 109 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.3955 | |
| 110 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.3674 | |
| 111 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.0377 | |
| 112 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.1 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.8852 | |
| 113 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.1 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.9133 | |
| 114 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.7962 | |
| 115 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.0987 | |
| 116 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.2619 | |
| 117 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.3354 | |
| 118 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.6797 | |
| 119 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.5841 | |
| 120 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.1078 | |
| 121 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.9063 | |
| 122 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.8797 | |
| 123 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.8178 | |
| 124 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.2607 | |
| 125 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P3 | 0.1233 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.5944 | |
| 126 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.0225 | |
| 127 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.1233 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.4253 | |
| 128 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.3127 | |
| 129 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P1 | 0.0767 | P1 | 0.0767 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.1615 | |
| 130 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.1788 | |
| 131 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.4229 | |
| 132 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.0942 | |
| 133 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.5985 | |
| 134 | P3 | 0.0433 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.1366 | |
| 135 | P3 | 0.0433 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.7212 | |
| 136 | P3 | 0.0433 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.1068 | |
| 137 | P3 | 0.0433 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.6538 | |
| 138 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.4942 | |
| 139 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.7791 | |
| 140 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.715 | |
| 141 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.9037 | |
| 142 | P1 | −0.0033 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.8909 | |
| 143 | P1 | −0.0033 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P3 | 0.1233 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.3342 | |
| 144 | P1 | −0.0033 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P3 | 0.3026 | P2 | 0.03 | P2 | 0.03 | 0.6987 | |
| 145 | P1 | −0.0033 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P1 | 0.0767 | P1 | −0.2426 | P2 | 0.03 | P2 | 0.03 | 0.1978 | |
| 146 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P3 | 0.3026 | P2 | 0.03 | 0.0305 | |
| 147 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P1 | −0.2426 | P2 | 0.03 | 0.7441 | |
| 148 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P3 | 0.3026 | P2 | 0.03 | 0.5000 | |
| 149 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P1 | −0.2426 | P2 | 0.03 | 0.4709 | |
| 150 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P3 | 0.3026 | P2 | 0.03 | 0.6959 | |
| 151 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P1 | −0.2426 | P2 | 0.03 | 0.6999 | |
| 152 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P3 | 0.3026 | P2 | 0.03 | 0.6385 | |
| 153 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P1 | −0.2426 | P2 | 0.03 | 0.0336 | |
| 154 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P3 | 0.3026 | P2 | 0.03 | 0.0688 | |
| 155 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P1 | −0.2426 | P2 | 0.03 | 0.3196 | |
| 156 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P3 | 0.3026 | P2 | 0.03 | 0.5309 | |
| 157 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P1 | −0.2426 | P2 | 0.03 | 0.6544 | |
| 158 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P3 | 0.3026 | P2 | 0.03 | 0.4076 | |
| 159 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P3 | 0.3026 | P1 | −0.2426 | P2 | 0.03 | 0.8200 | |
| 160 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P3 | 0.3026 | P2 | 0.03 | 0.7184 | |
| 161 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P1 | −0.2426 | P1 | −0.2426 | P2 | 0.03 | 0.9686 | |
| 162 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P3 | 0.3026 | 0.5313 | |
| 163 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P1 | −0.2426 | 0.3251 | |
| 164 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P3 | 0.3026 | 0.4799 | |
| 165 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P1 | −0.2426 | 0.9047 | |
| 166 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P3 | 0.3026 | 0.6099 | |
| 167 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P1 | −0.2426 | 0.6177 | |
| 168 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P3 | 0.3026 | 0.8594 | |
| 169 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0433 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P1 | −0.2426 | 0.8055 | |
| 170 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P3 | 0.3026 | 0.5767 | |
| 171 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P1 | −0.2426 | 0.1829 | |
| 172 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P3 | 0.3026 | 0.2399 | |
| 173 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P1 | −0.2426 | 0.8865 | |
| 174 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P3 | 0.3026 | 0.0287 | |
| 175 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P3 | 0.3026 | P1 | −0.2426 | 0.4899 | |
| 176 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P3 | 0.3026 | 0.1679 | |
| 177 | P2 | 0.02 | P2 | 0.02 | P1 | −0.0033 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.06 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P1 | −0.2426 | P1 | −0.2426 | 0.9787 | |
| 178 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.7127 | |
| 179 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.5005 | |
| 180 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.4711 | |
| 181 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.0596 | |
| 182 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.682 | |
| 183 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.0424 | |
| 184 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.0714 | |
| 185 | P3 | 0.0433 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.5216 | |
| 186 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.0967 | |
| 187 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.8181 | |
| 188 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.8175 | |
| 189 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P3 | 0.0756 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.7224 | |
| 190 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.1499 | |
| 191 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P3 | 0.0756 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.6596 | |
| 192 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P3 | 0.3026 | 0.5186 | |
| 193 | P1 | −0.0033 | P2 | 0.02 | P2 | 0.02 | P1 | 0.0444 | P2 | 0.06 | P1 | 0.0444 | P2 | 0.1 | P2 | 0.1 | P2 | 0.1 | P2 | 0.03 | P2 | 0.03 | P1 | −0.2426 | 0.9730 |
References
- Stewart, D. A platform with six degrees of freedom. Proceeding Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Hunt, K.H. Structural kinematics of In-Parallel-Actuated Robot-Arms. ASME J. Transm. Autom. Des. 1983, 105, 705–712. [Google Scholar] [CrossRef]
- Clavel, R. Delta, a fast robot with parallel geometry. In Proceedings of the 18th International Symposium on Industrial Robots, Lausanne, Switzerland, 26–28 April 1988; pp. 91–100. [Google Scholar]
- Clavel, R. Device for the Movement and Positioning of an Element in Space. WO Patent No. WO8703528A1, 18 June 1987. [Google Scholar]
- Tsai, L.W. Multi-Degree-of-Freedom Mechanism for Machine Tools and the like. U. S Patent No. 5656905, 12 August 1997. [Google Scholar]
- Tsai, L.W.; Walsh, G.C.; Stamper, R.E. Kinematics of novel three DOF translational platforms. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; pp. 3446–3451. [Google Scholar]
- Stamper, R.E.; Tsai, L.W.; Walsh, G.C. Optimization of a three DOF translational platform for well-conditioned workspace. In Proceedings of the 1997 IEEE International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; pp. 3250–3255. [Google Scholar]
- Gallardo-Alvarado, J.; Balmaceda-Santamaría, A.L.; Castillo-Castaneda, E. An application of screw theory to the kinematic analysis of a Delta-type robot. J. Mech. Sci. Technol. 2014, 28, 3785–3792. [Google Scholar] [CrossRef]
- Brinker, J.; Corves, B.; Takeda, Y. Kinematic performance evaluation of high-speed Delta parallel robots based on motion/force transmission indices. Mech. Mach. Theory 2018, 125, 111–125. [Google Scholar] [CrossRef]
- Lu, X.; Zhao, Y.; Liu, M. Self-learning interval type-2 fuzzy neural network controllers for trajectory control of a Delta parallel robot. Neurocomputing 2018, 283, 107–119. [Google Scholar] [CrossRef]
- Xu, D.T.; Sun, Z.L. Continuous Stiffness Mapping of Modified Delta Parallel Mechanism. J. Northeast. Univ. (Nat. Sci.) 2012, 33, 1465–1469. (In Chinese) [Google Scholar]
- Orsino, R.M.M.; Coelho, T.A.H.; Pesce, C.P. Analytical mechanics approaches in the dynamic modelling of Delta mechanism. Robotica 2015, 33, 953–973. [Google Scholar] [CrossRef]
- Kuo, Y.L. Mathematical modeling and analysis of the Delta robot with flexible links. Comput. Math. Appl. 2016, 71, 1973–1989. [Google Scholar] [CrossRef]
- Silva, V.G.; Tavakoli, M.; Marques, L. Optimization of a Three Degrees of Freedom DELTA Manipulator for Well-Conditioned Workspace with a Floating Point Genetic Algorithm. Int. J. Nat. Comput. Res. 2014, 4, 1–14. [Google Scholar] [CrossRef][Green Version]
- Bounab, B. Multi-objective optimal design based kineto-elastostatic performance for the DELTA parallel mechanism. Robotica 2016, 34, 258–273. [Google Scholar] [CrossRef]
- Mazare, M.; Taghizadeh, M. Geometric Optimization of a Delta Type Parallel Robot Using Harmony Search Algorithm. Robotica 2019, 37, 1494–1512. [Google Scholar] [CrossRef]
- Lin, P.D.; Ehmann, K.F. Direct Volumetric Error Evaluation for Multi-Axis Machines. Int. J. Mach. Tool Manufact. 1993, 33, 675–694. [Google Scholar] [CrossRef]
- Wang, S.M.; Ehmann, K.F. Error model and accuracy analysis of a Six-DOF Stewart Platform. J. Manuf. Sci. Eng. 2002, 124, 286–296. [Google Scholar] [CrossRef]
- Tang, G.B.; Huang, T. Kinematic Calibration of Delta Robot. Chin. J. Mech. Eng. 2003, 39, 55–60. (In Chinese) [Google Scholar] [CrossRef]
- Zheng, H.; Tang, G.B. Error modeling and sensitivity analysis of Delta robot. J. Harbin Inst. Technol. 2009, 41, 252–255. (In Chinese) [Google Scholar]
- Wenchang, Z.; Jiangping, M.; Yi, L.; Xin, Z. Calibration of Delta parallel robot kinematic errors based on laser tracker. J. Tianjin Univ. (Sci. Technol.) 2013, 46, 257–262. (In Chinese) [Google Scholar]
- Ghazi, M.; Nazir, Q.; Butt, S.U.; Baqai, A.A. Accuracy analysis of 3-RSS Delta parallel manipulator. Procedia Manuf. 2018, 17, 174–182. [Google Scholar] [CrossRef]
- Andrioaia, D.; Stan, G.; Funaru, M.; Obreja, C. The Influence of Kinematic Joints Clearances on the Positioning Accuracy of 3DOF Delta Parallel Robots. Appl. Mech. Mater. 2013, 371, 406–410. [Google Scholar] [CrossRef]
- Andrioaia, D.; Stan, G.; Cristea, I. Influence of Dimensional Deviations on the Positioning Accuracy of Robots with Delta 3 DOF Parallel Structure. Appl. Mech. Mater. 2014, 657, 839–843. [Google Scholar] [CrossRef]
- Andrioaia, D.; Puiu, G.; Ghenadi, A. The Influence of the Errors Introduced by the Actuator on the Positioning Accuracy of the Robots with Parallel Delta 3 DOF. Appl. Mech. Mater. 2015, 809, 1225–1230. [Google Scholar] [CrossRef]
- Tian, C.; Zhang, D. Design and analysis of novel kinematically redundant reconfigurable generalized parallel manipulators. Mech. Mach. Theory 2021, 166, 104481. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Y.; Yang, D.; Li, T. Research on Input Scheme Selection of a Novel Parallel Mechanism. J. Robot. 2021, 2021, 8784361. [Google Scholar] [CrossRef]
- Dastjerdi, A.H.; Sheikhi, M.M.; Masouleh, M.T. A complete analytical solution for the dimensional synthesis of 3-DOF delta parallel robot for a prescribed workspace. Mech. Mach. Theory 2020, 153, 103991. [Google Scholar] [CrossRef]
- Li, Y.; Shang, D.; Liu, Y. Kinematic modeling and error analysis of Delta robot considering parallelism error. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Shen, H.; Meng, Q.; Li, J.; Deng, J.; Wu, G. Kinematic sensitivity, parameter identification and calibration of a non-fully symmetric parallel Delta robot. Mech. Mach. Theory 2021, 161, 104311. [Google Scholar] [CrossRef]
- Box, G.E.; Behnken, D.W. Some New Three Level Designs for the Study of Quantitative Variables. Technometrics 1960, 2, 455–475. [Google Scholar] [CrossRef]
- Vining, G.G.; Kowalski, S.M.; Montgomery, D.C. Response Surface Designs within a Split-Plot Structure. J. Qual. Technol. 2005, 37, 115–129. [Google Scholar] [CrossRef]
- Soo, E.L.; Salleh, A.B.; Basri, M.; Rahman, R.A.; Kamaruddin, K. Response surface methodological study on lipase-catalyzed synthesis of amino acid surfactants. Process Biochem. 2004, 39, 1511–1518. [Google Scholar] [CrossRef]
- Lee, S.J. The Determination of the Probabilistic of Velocities and Acceleration in Kinematic Chain with Uncertainty. ASME J. Mech. Transm. Autom. Des. 1991, 113, 84–90. [Google Scholar] [CrossRef]
- Liu, W.X. Mechanical Reliability Design; Tsinghua University Press: Beijing, China, 2003. (In Chinese) [Google Scholar]
- Sun, Z.; Chen, L. Practical Design Theory and Method for Mechanical Reliability; Science Press: Beijing, China, 2003. (In Chinese) [Google Scholar]
- Jarmoluk, A.; Pietrasik, Z. Response surface methodology study on the effects of blood plasma, microbial transglutaminase and κ-carrageenan on pork batter gel properties. J. Food Eng. 2003, 60, 327–334. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equivalent Link | Local Coordinate | Transformation Matrix | Variation Range | |
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | ||||
| 4 | - | - | ||
| 5 | - | - |
| Original Input Errors (i = 1, 2, 3) | Mean μ | Standard Deviation σ |
|---|---|---|
| Radius error of moving platform /mm | 0.02 | 0.01 |
| Length error of driving arm /mm | 0.06 | 0.0067 |
| Clearance error of revolute pair /mm | 0.10 | 0.01 |
| Driving error at any time /rad | 0.03 | 0.1173 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Q.; Ma, H.; Ma, J.; Sun, Z.; Li, C. Sensitivity Analysis of Reliability of Low-Mobility Parallel Mechanisms Based on a Response Surface Method. Appl. Sci. 2021, 11, 9002. https://doi.org/10.3390/app11199002
Yang Q, Ma H, Ma J, Sun Z, Li C. Sensitivity Analysis of Reliability of Low-Mobility Parallel Mechanisms Based on a Response Surface Method. Applied Sciences. 2021; 11(19):9002. https://doi.org/10.3390/app11199002
Chicago/Turabian StyleYang, Qiang, Hongkun Ma, Jiaocheng Ma, Zhili Sun, and Cuiling Li. 2021. "Sensitivity Analysis of Reliability of Low-Mobility Parallel Mechanisms Based on a Response Surface Method" Applied Sciences 11, no. 19: 9002. https://doi.org/10.3390/app11199002
APA StyleYang, Q., Ma, H., Ma, J., Sun, Z., & Li, C. (2021). Sensitivity Analysis of Reliability of Low-Mobility Parallel Mechanisms Based on a Response Surface Method. Applied Sciences, 11(19), 9002. https://doi.org/10.3390/app11199002