
A Real-Time BLE/PDR Integrated System by Using an Improved Robust Filter for Indoor Position


Abstract
1. Introduction
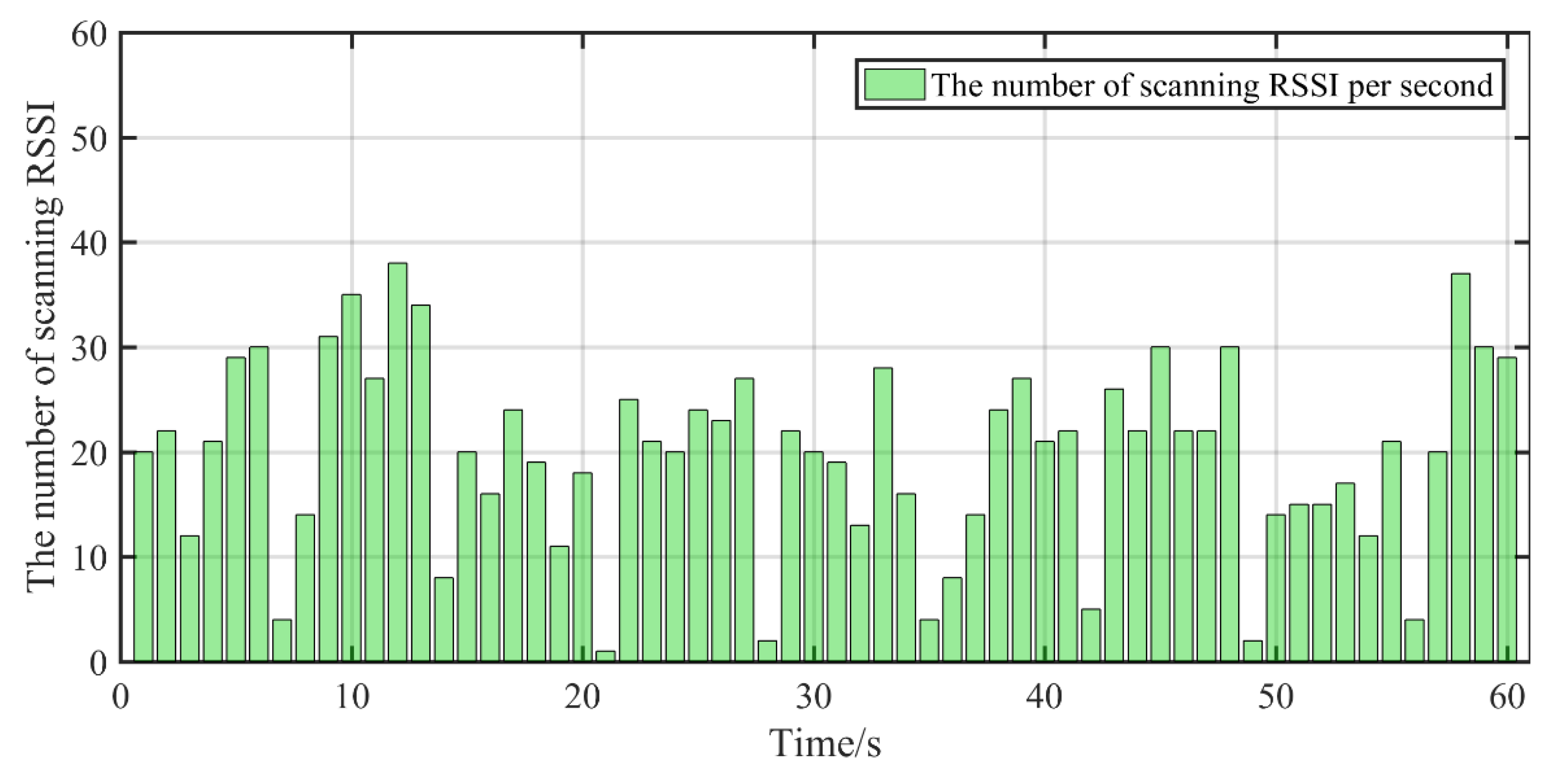
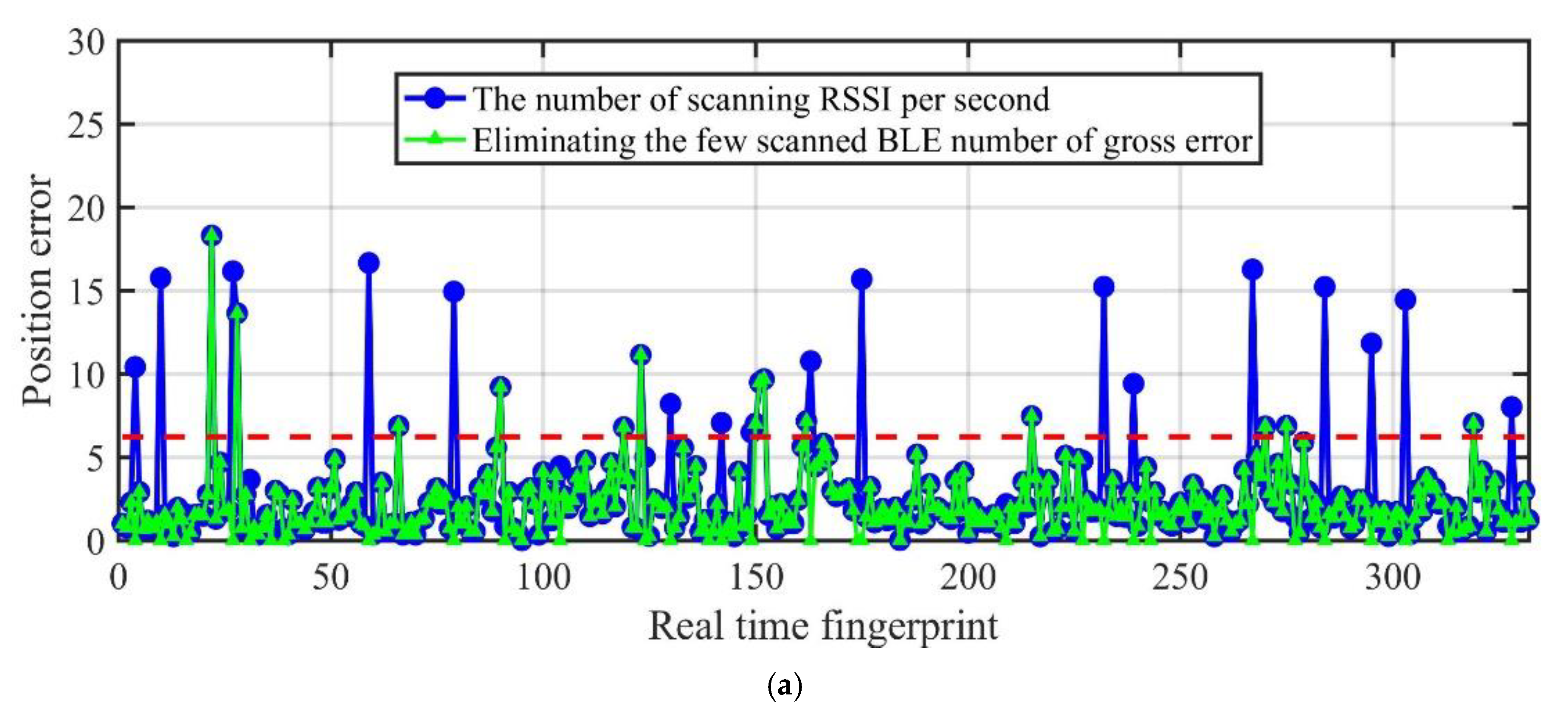
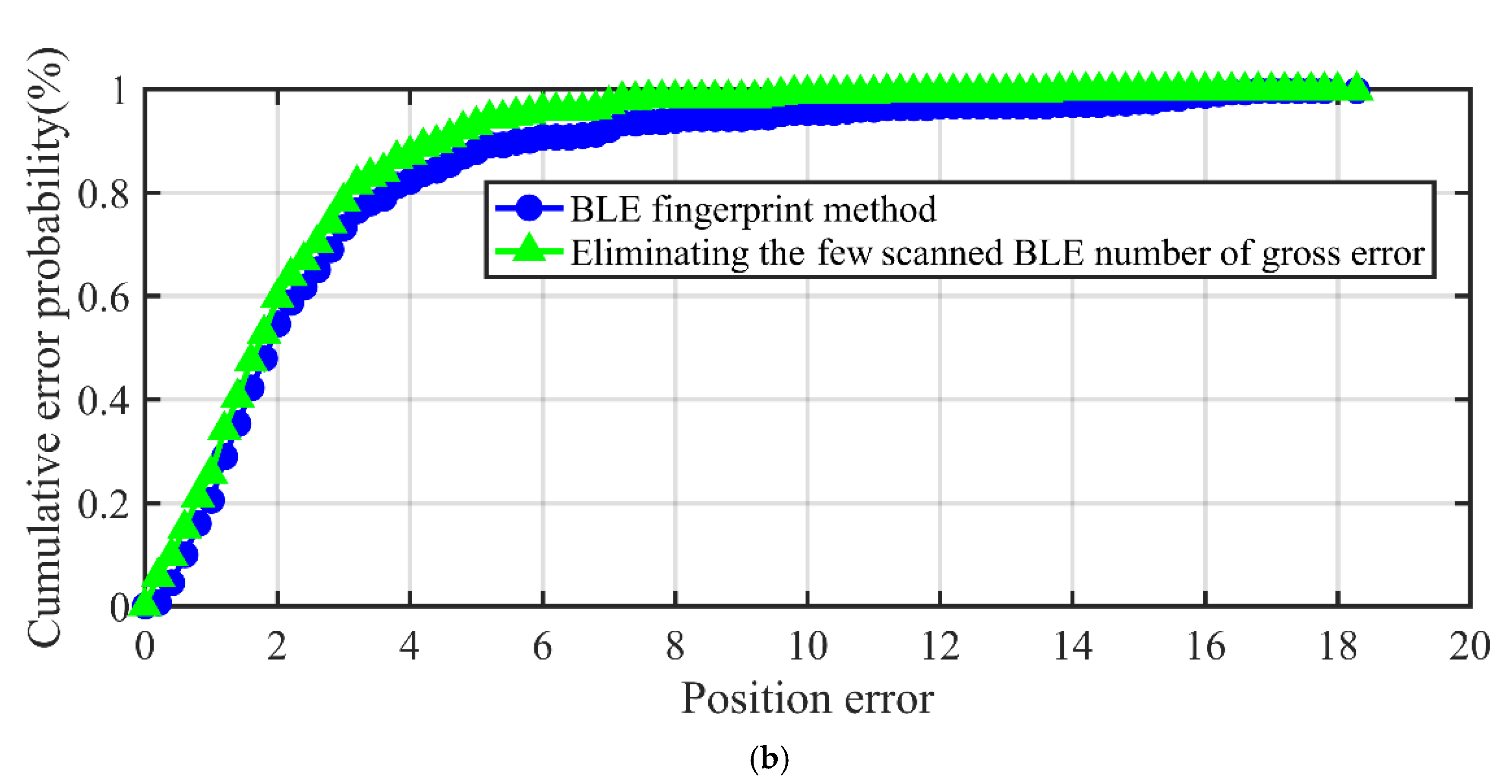
- We found that the errors of the BLE fingerprint method are not only related to the signal fluctuation but are also affected by scanning numbers of BLE beacons after statistically analyzing the real-time signal data in a harsh environment. When the scanning BLE beacon numbers are few, coarse errors will more likely occur;
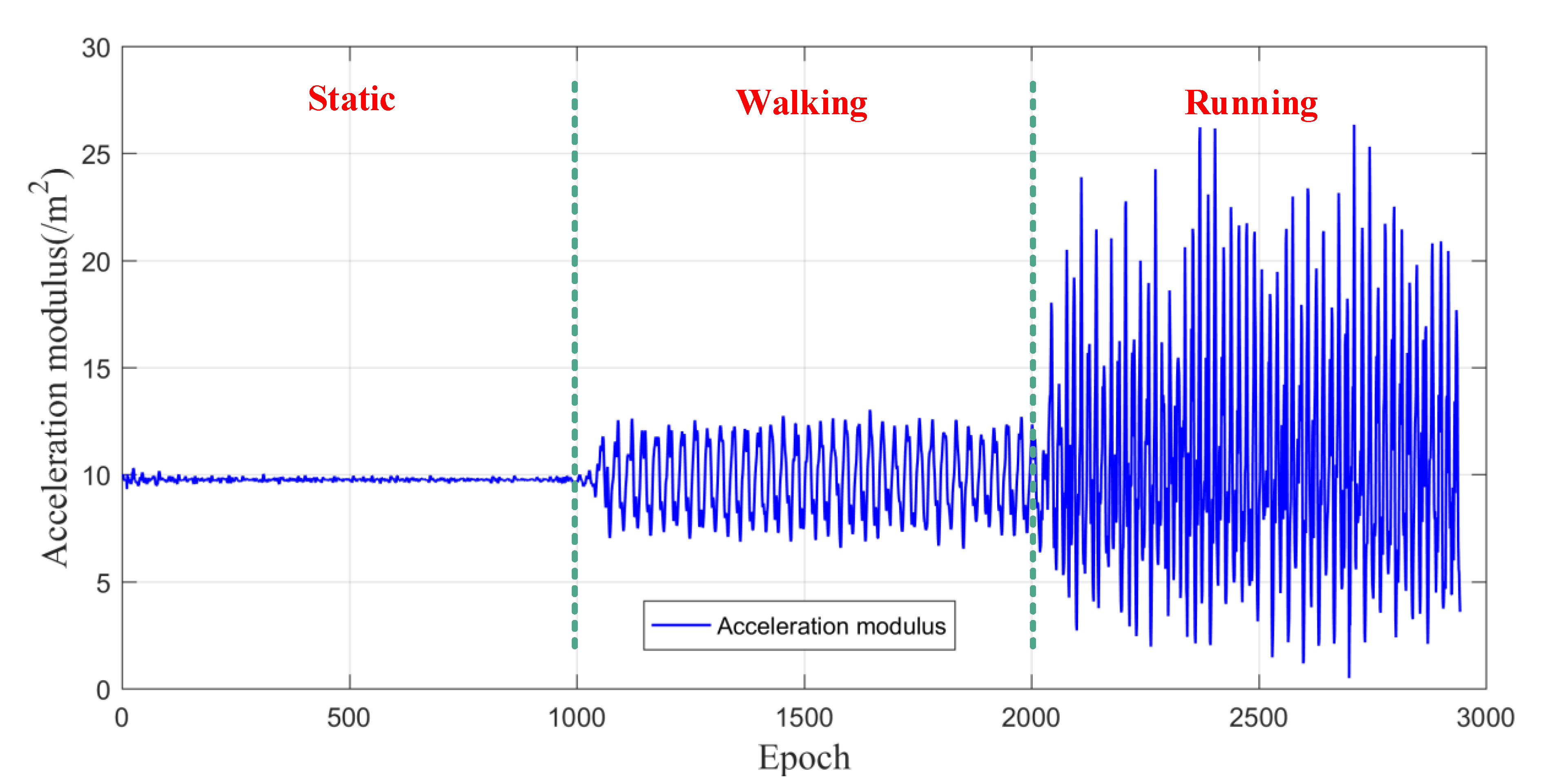
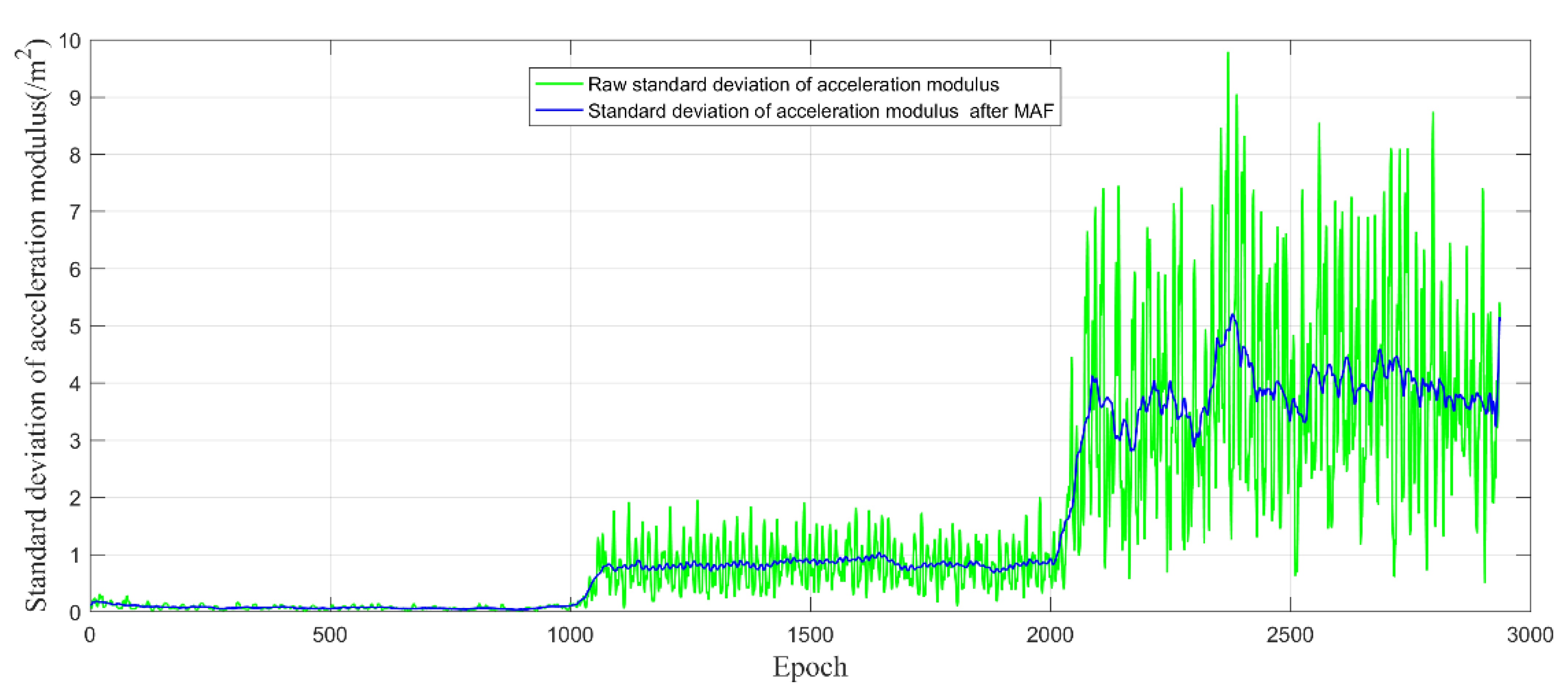
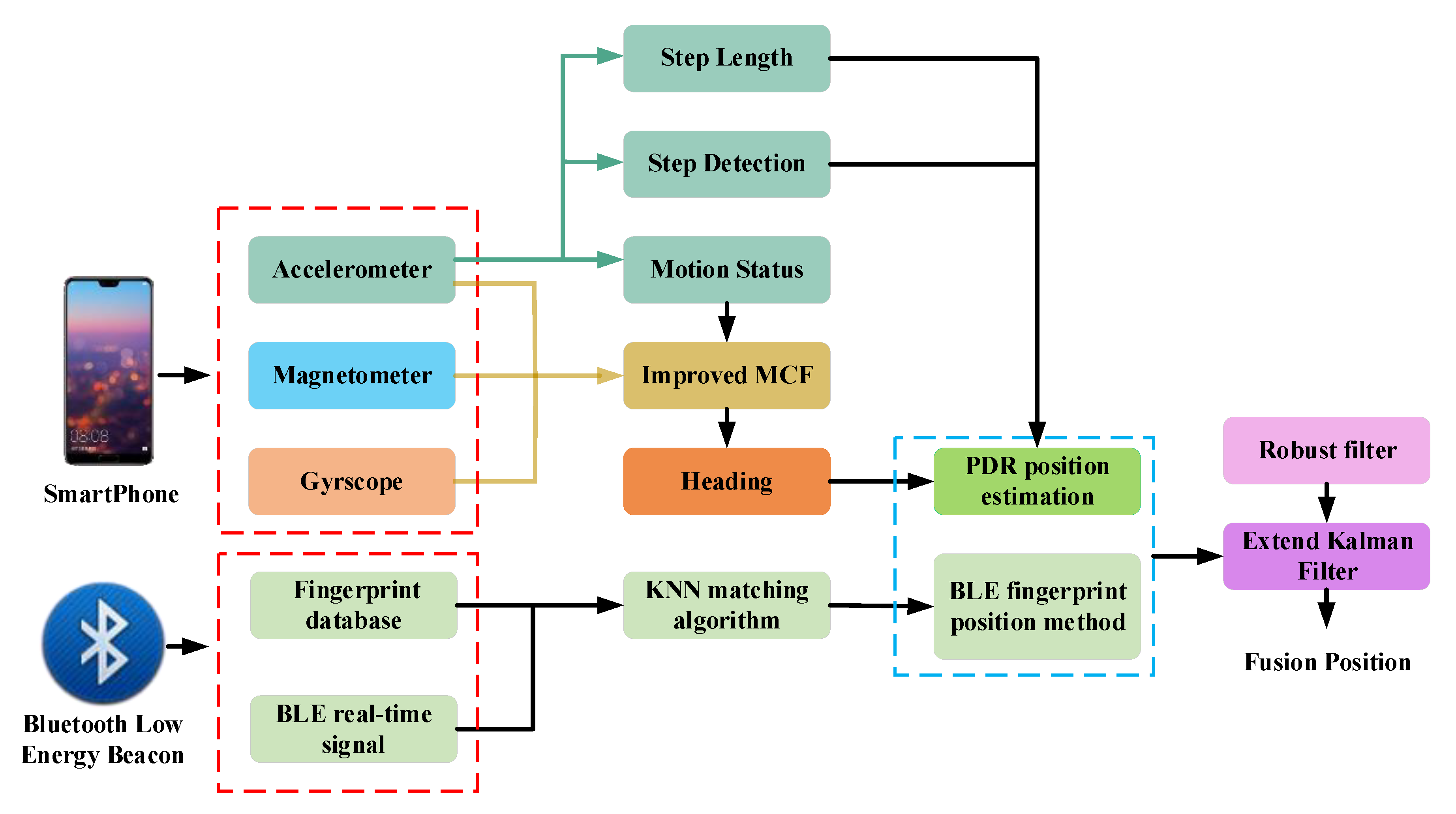
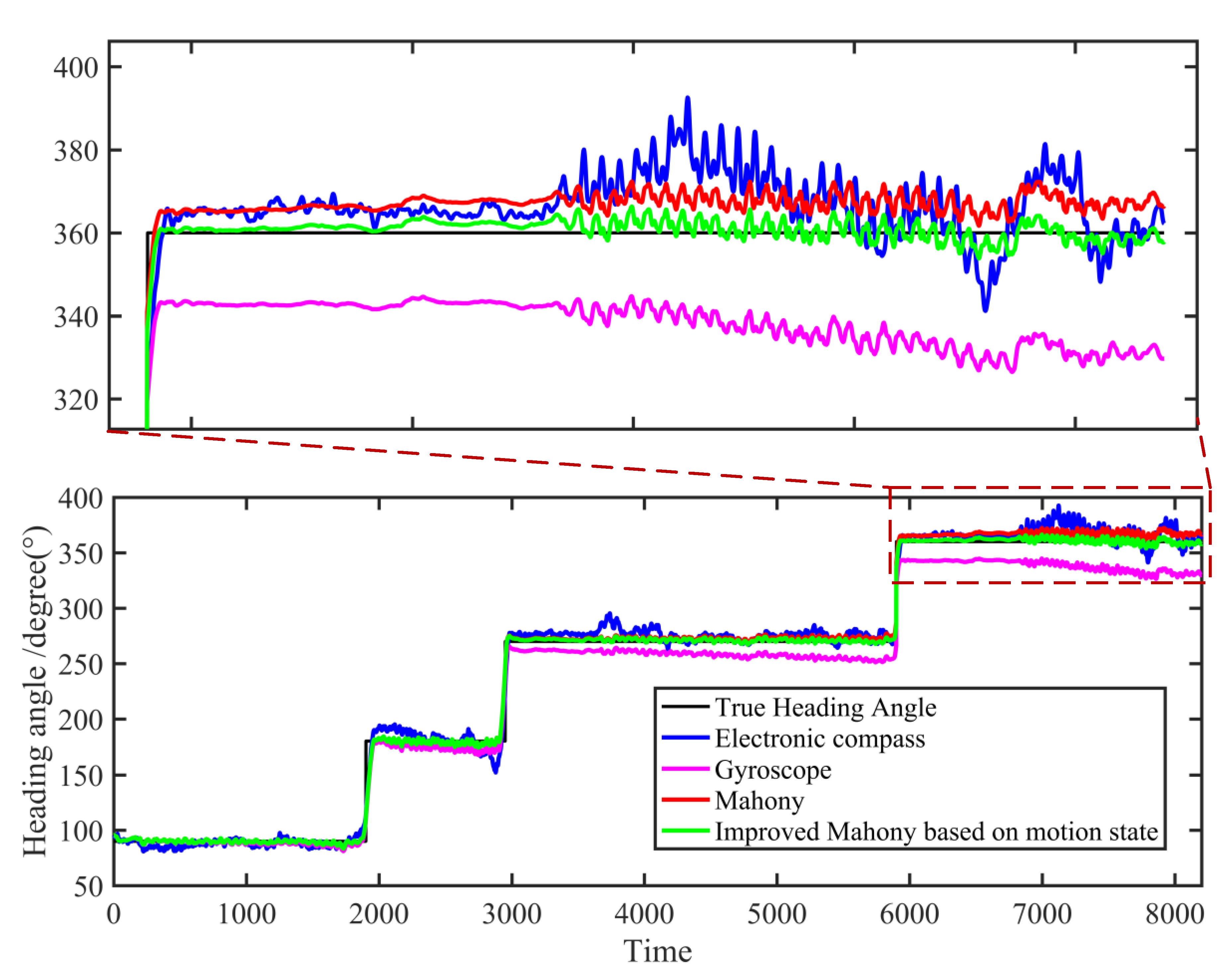
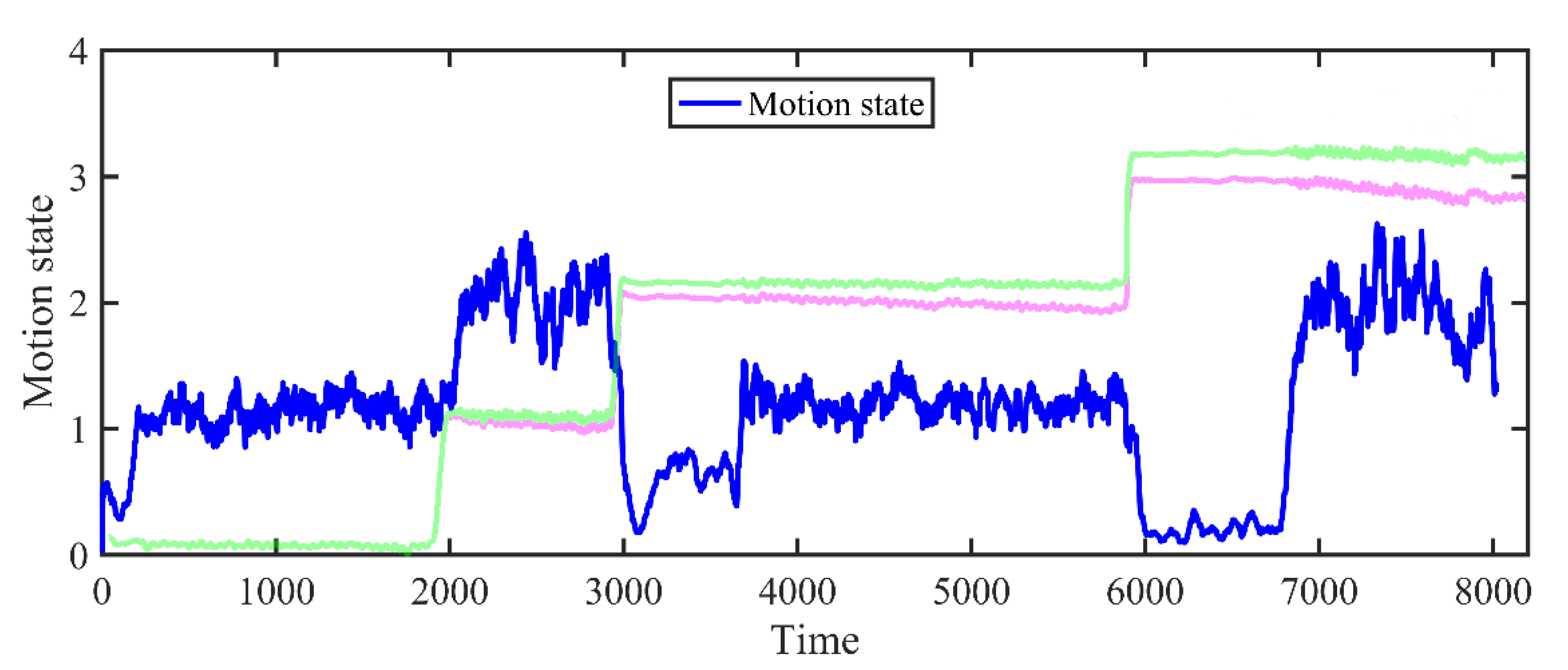
- We found that the accuracy of the heading is also affected by the motion states of the pedestrian. An improved Mahony complementary filter is introduced to keep the heading angle stable by adaptively changing the control parameters in the filter after considering the different people’s motion states;
- To meet the demand of real-time position and considering the computational load of the smartphone, we adopt the EKF method to solve the nonlinear fusion problem to combine PDR with the BLE fingerprint position method to provide the real-time position service. To cope with the gross error caused by the BLE fingerprint method in a harsh environment, a robust filter based on the EKF was proposed. The robust filter detected the gross error at different granularity by constructing a robust vector changing the observation covariance matrix of the extended Kalman filter (EKF) adaptively when the application is running. The experimental results demonstrate that the proposed method has better performance at position accuracy and stability.
2. Related Works
3. Materials and Methods
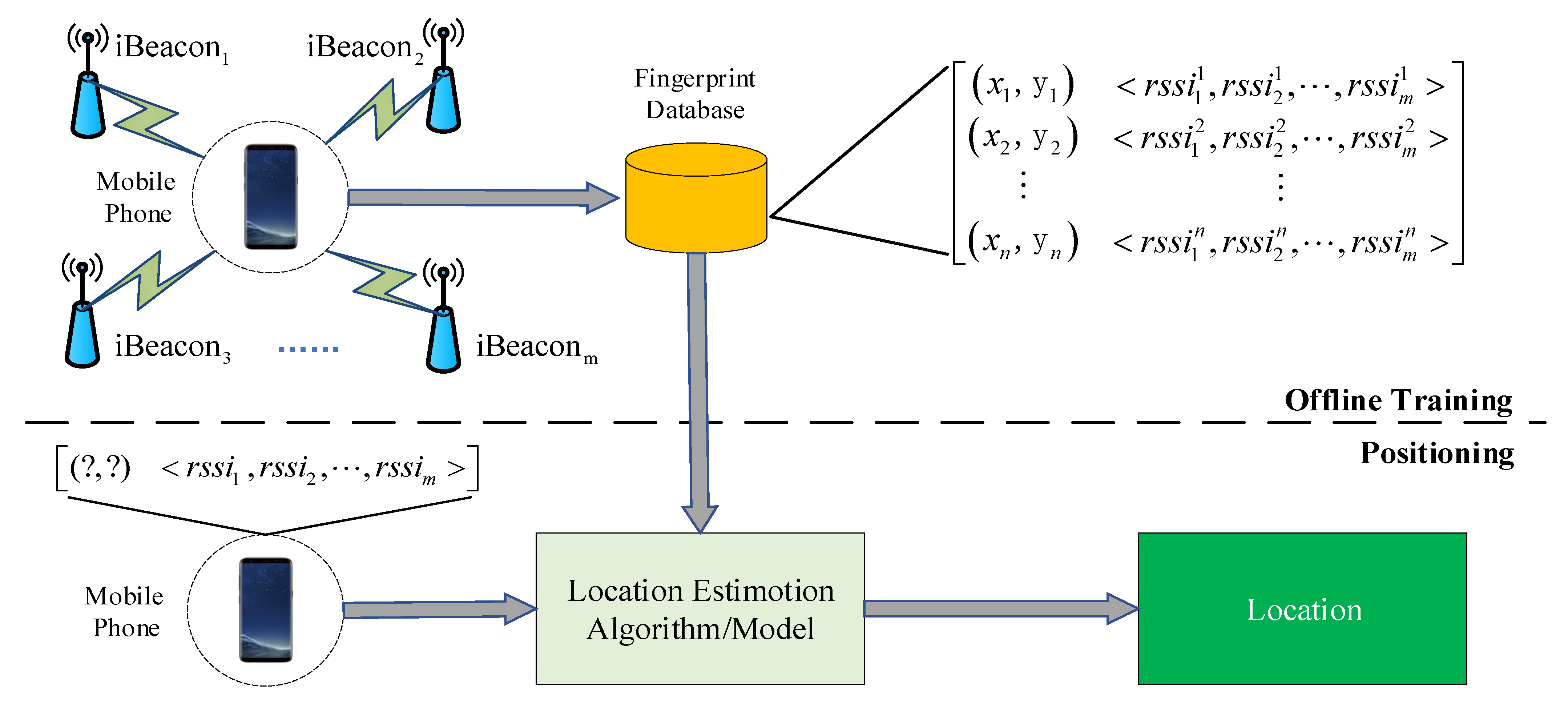
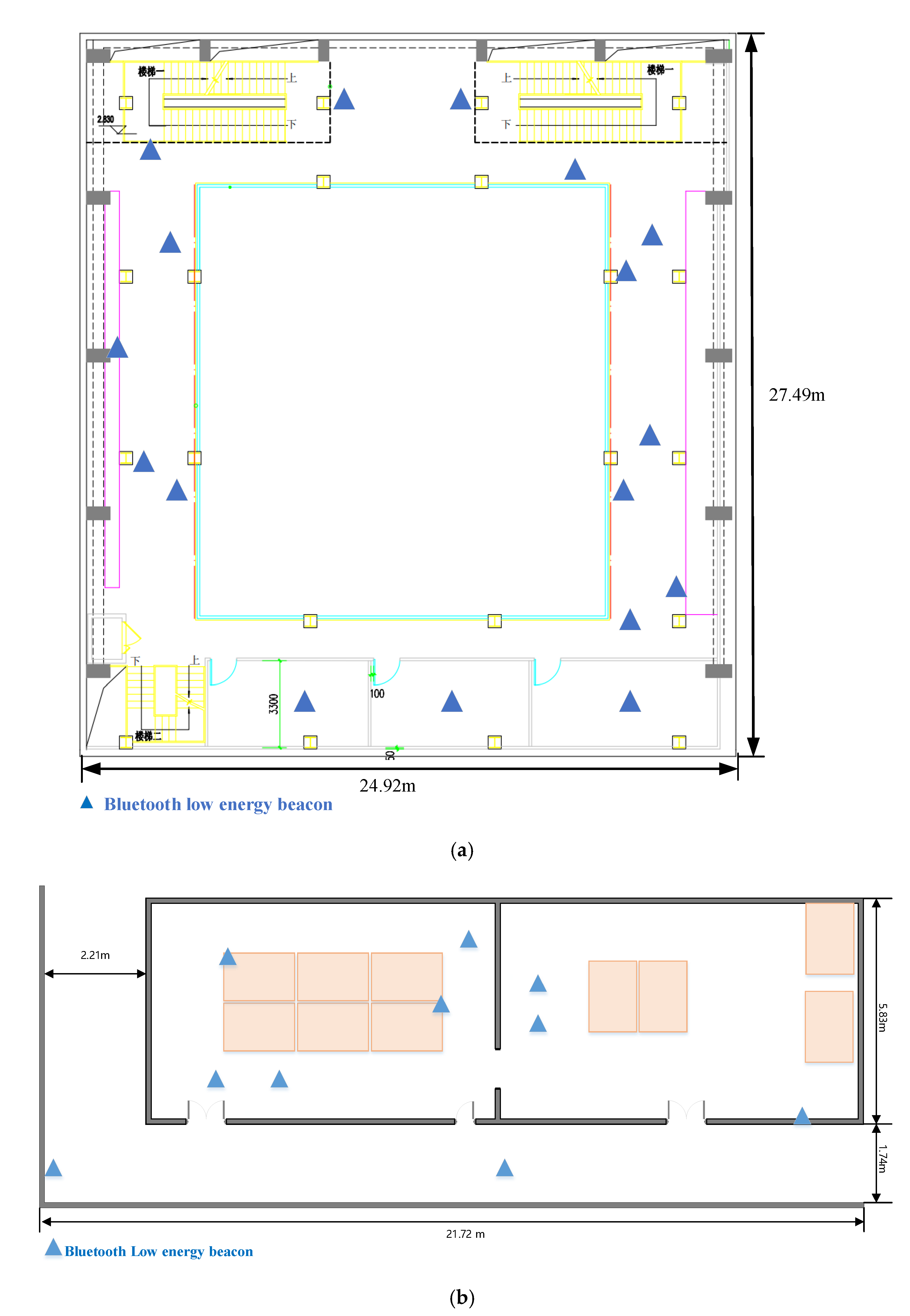
3.1. BLE Position Technology
3.2. PDR Technology
3.3. An Improved Mahony Complementary Filter Based on the Motion States
3.4. BLE/PDR Integrated System Based on EKF
3.5. A Robust Filter Model
- The difference exceeds the limit;
- The difference exceeds the limit;
- The innovation vector exceeds the limit, and are within the acceptable range;
- The difference , and the innovation vector exceed the limit.
4. Experiments and Analysis
4.1. BLE Fingerprint Position Experiments and Error Analysis
4.2. Heading Estimation Based on Motion States
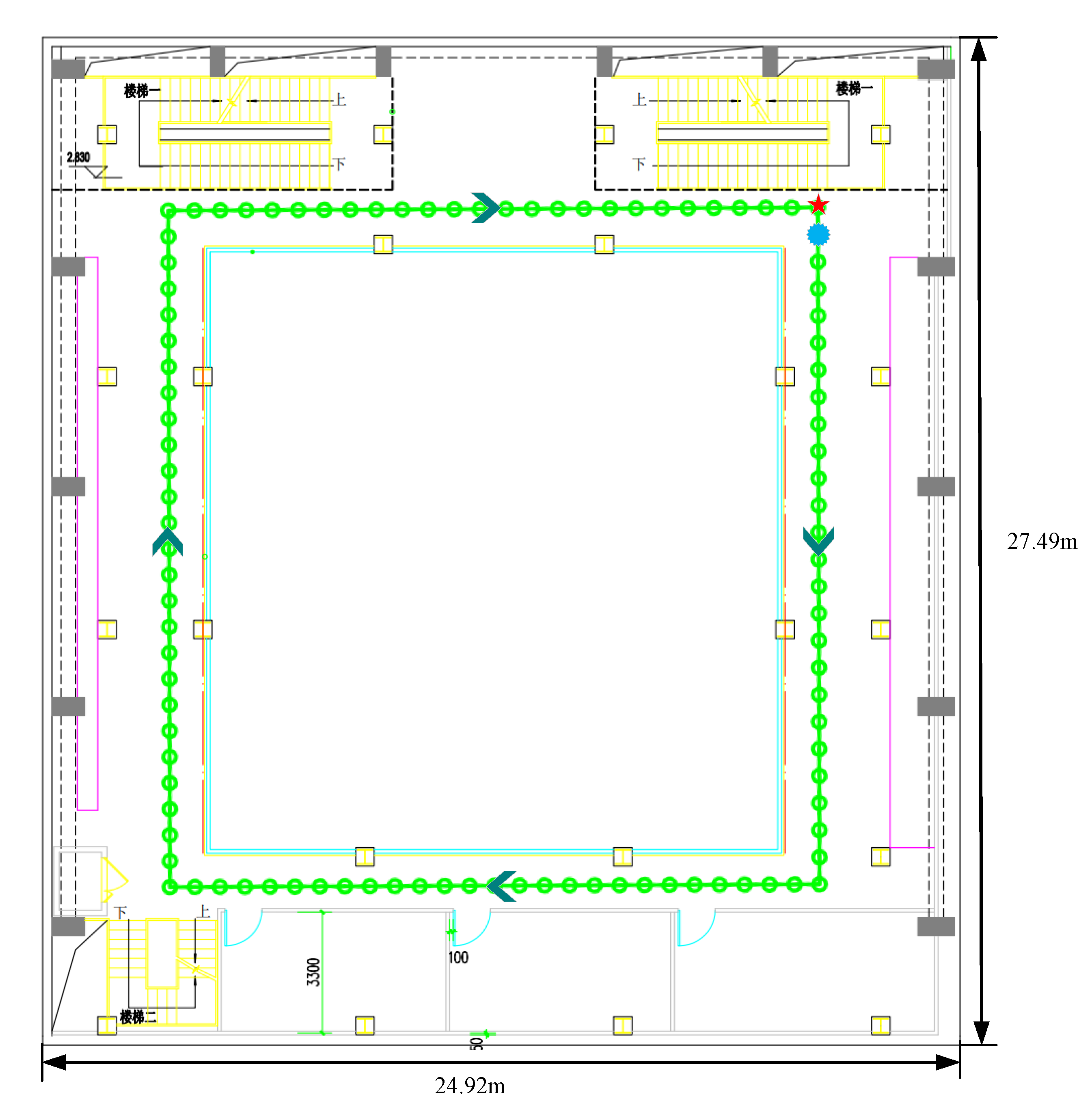
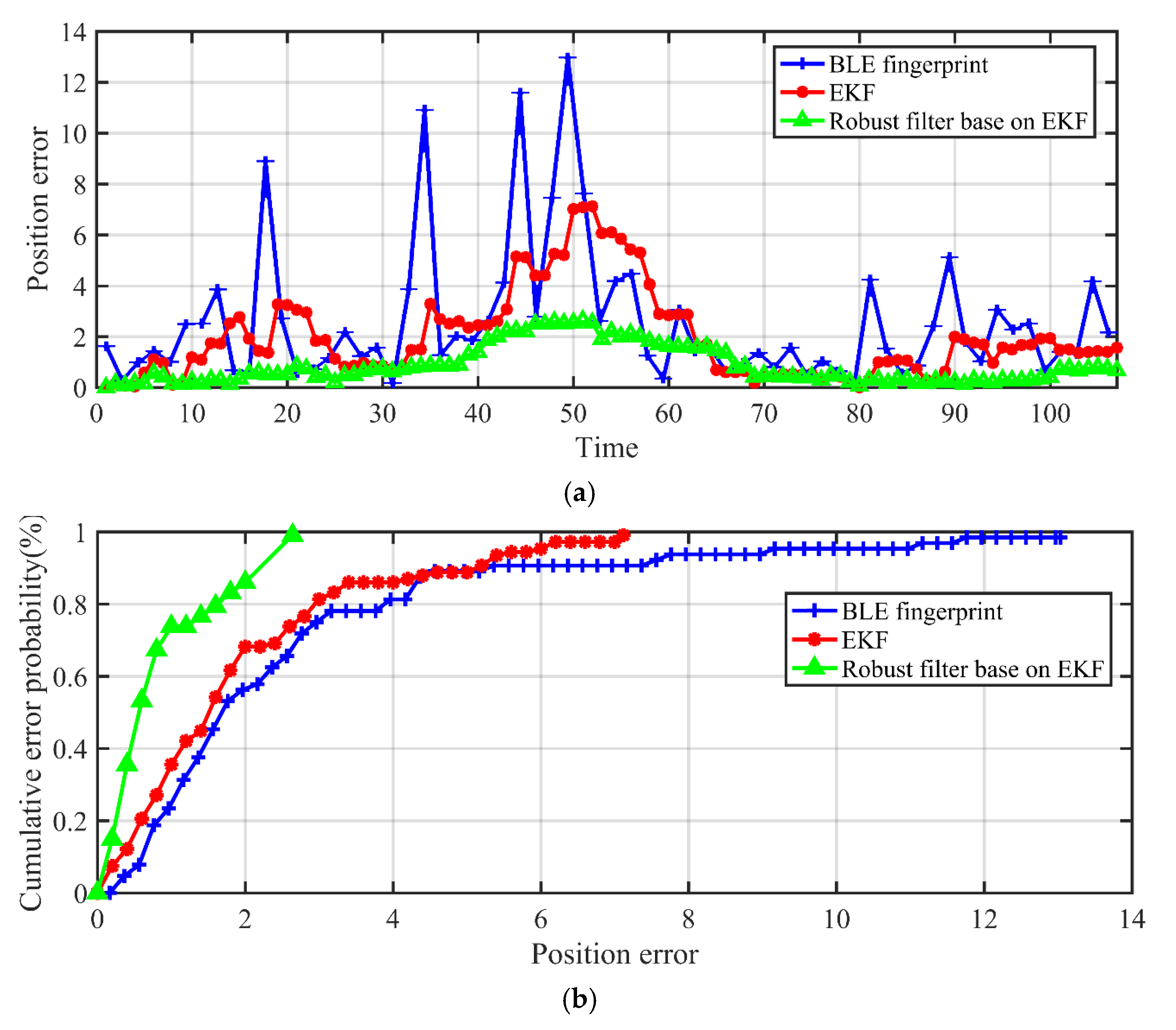
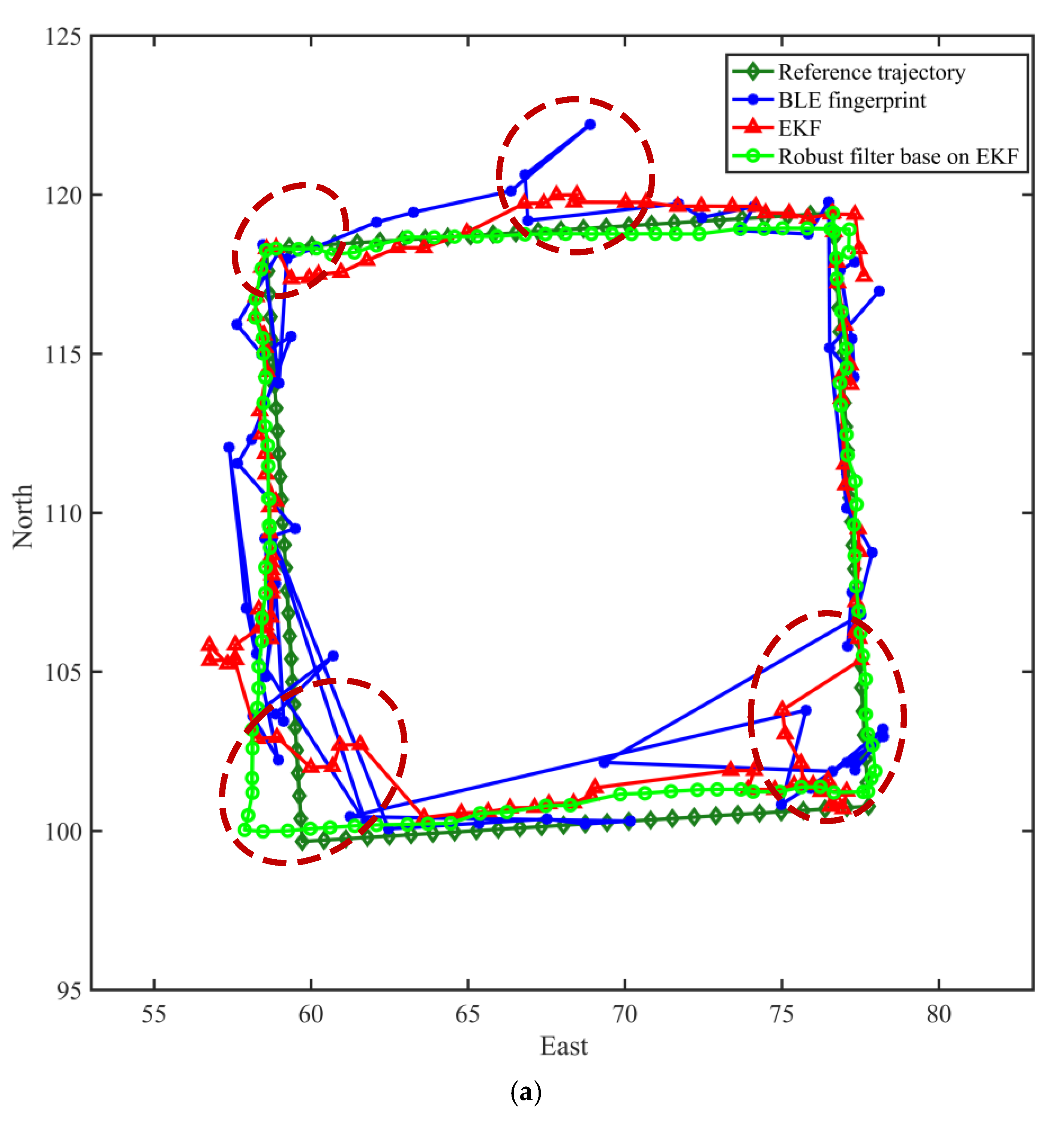
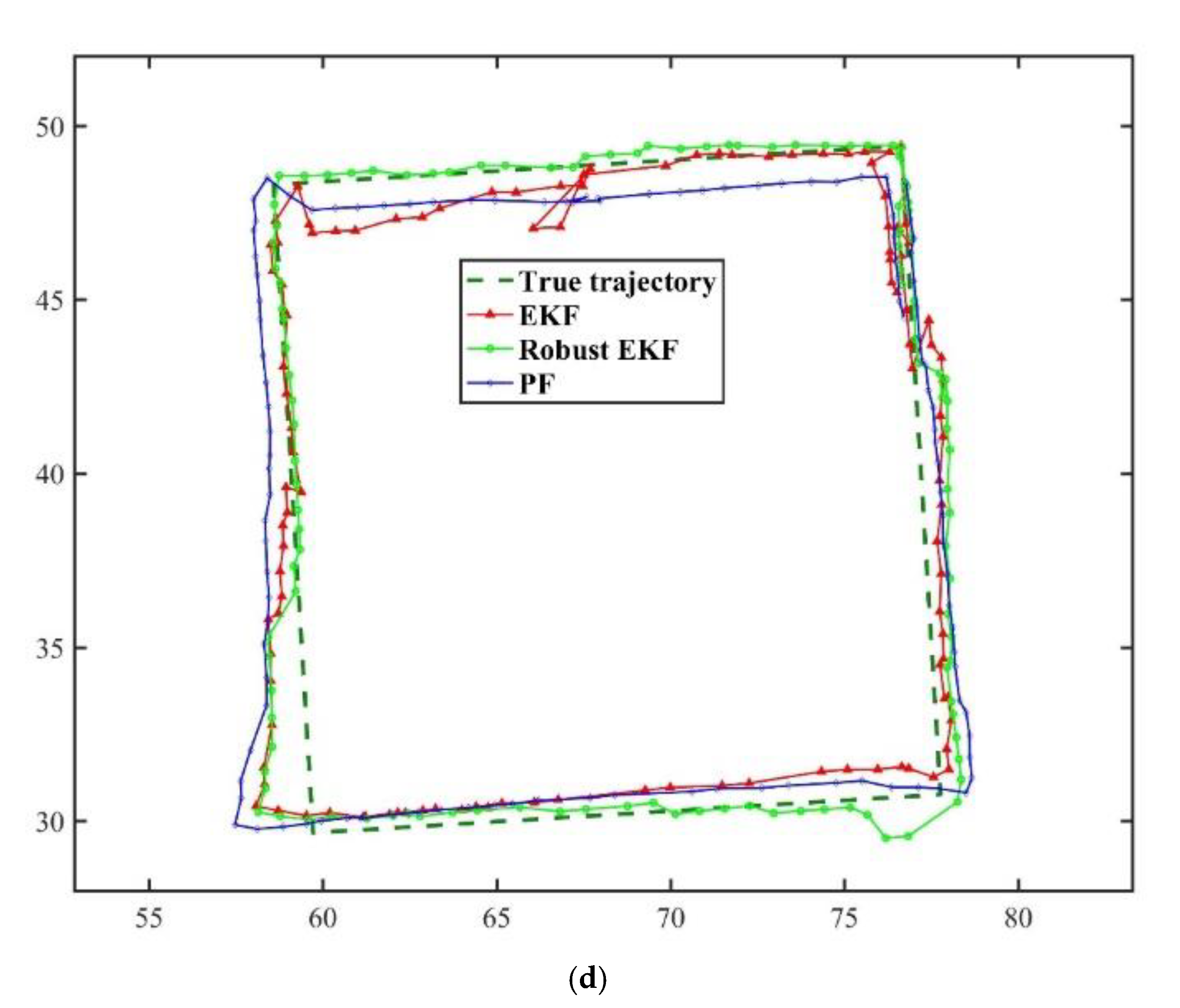
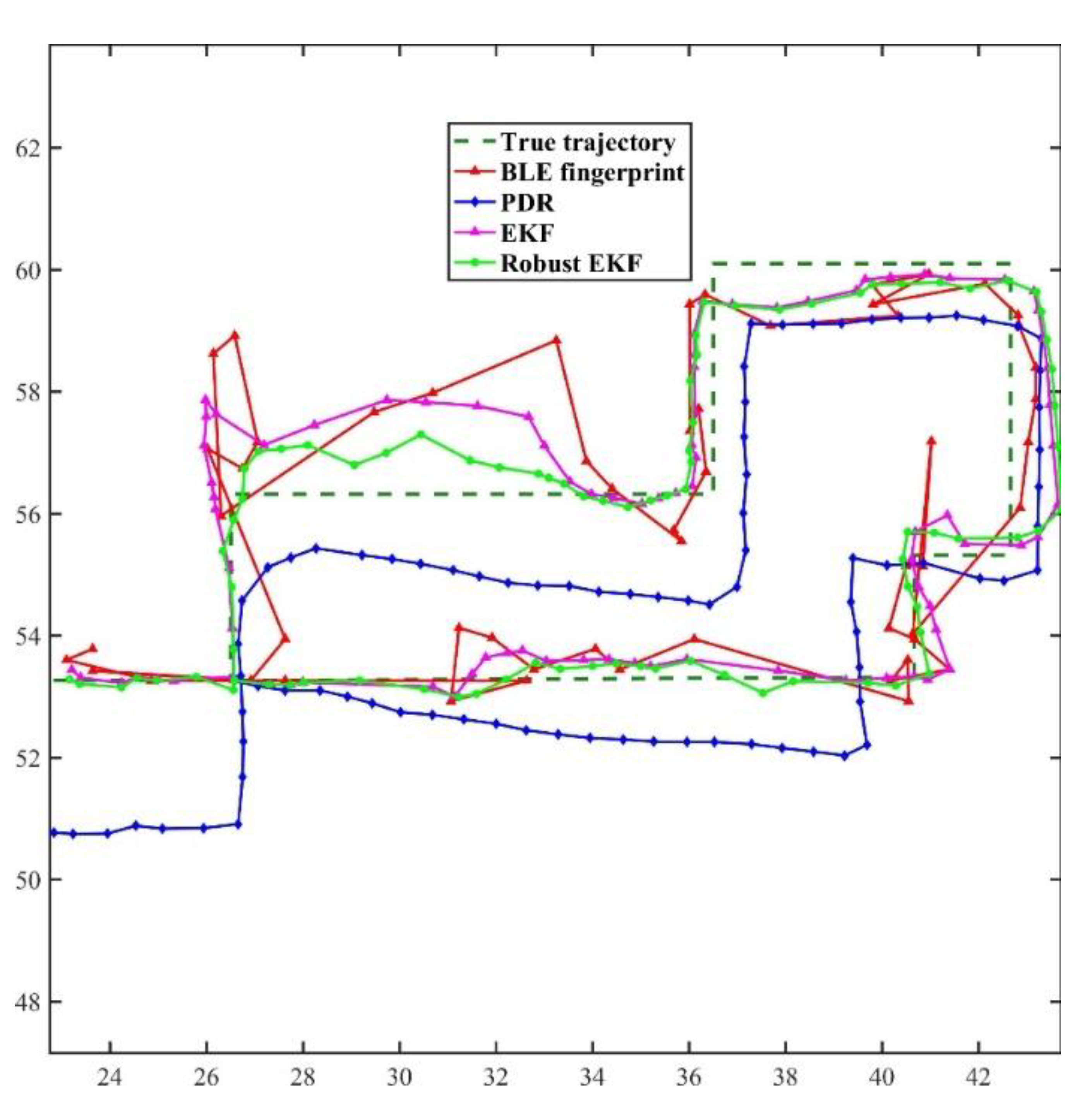
4.3. BLE/PDR Integrated System Position Experiment
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Received signal strength indicator | |
| The east coordinate in the pedestrian dead reckoning at time | |
| The north coordinate in the pedestrian dead reckoning at time | |
| The step length at time | |
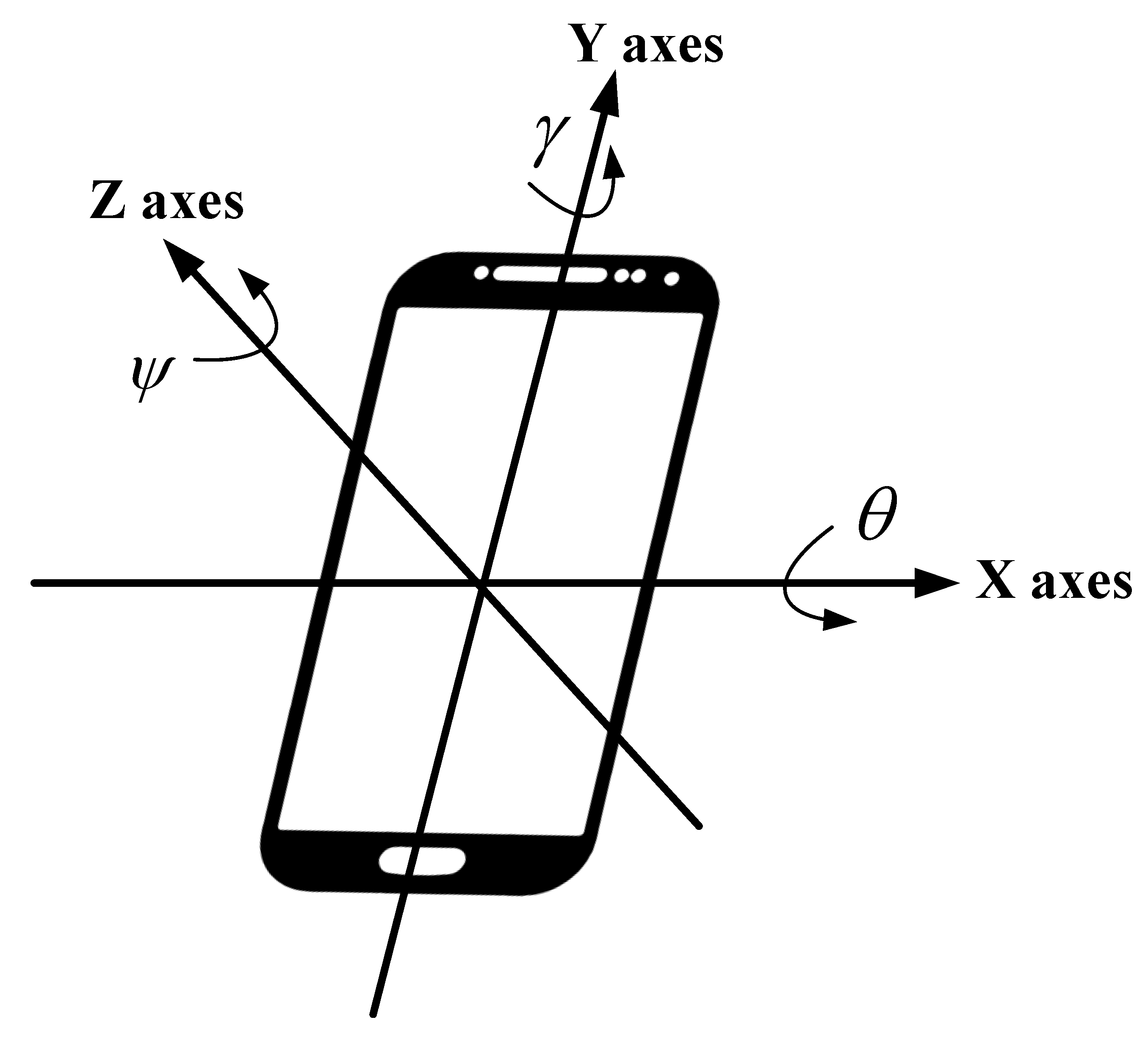
| The heading angle | |
| The pitch angle | |
| The roll angle | |
| Refer to the rotation matrix from the geographic coordinate system to the carrier coordinate system | |
| Refer to the rotation matrix from the carrier system to the carrier coordinate system | |
| The quaternion vector | |
| The ith item of the quaternion vector | |
| Refer to the error correction in the Runger-Kutta method | |
| The proportional control parameters in the proportional-integral method | |
| The integral control parameters in the proportional-integral method | |
| Refer to the gyroscope data in Section 3.3 | |
| Refer to the magnetometer data in Section 3.3 | |
| Refer to the accelerometer data in Section 3.3 | |
| Refer to the acceleration of gravity in Section 3.3 | |
| The average acceleration modulus | |
| The standard deviation of acceleration modulus | |
| Refer to the state vector in the EKF | |
| The process noise of the north coordinate in Section 3.4 | |
| The process noise of the east coordinate in Section 3.4 | |
| The process noise of the step length in Section 3.4 | |
| The process noise of the heading angle in Section 3.4 | |
| The variances of the north coordinate process noise | |
| The variances of the east coordinate process noise | |
| The variances of the step length process noise | |
| The variances of the heading angle process noise | |
| The state transition matrix in the EKF | |
| The Jacobi matrix of | |
| Refer to the observation vector in the EKF | |
| The north coordinate of observation at time | |
| The east coordinate of observation at time | |
| The observation noise of the north coordinate | |
| The observation noise of the east coordinate | |
| The variances of the north coordinate observation noise | |
| The variances of the east coordinate observation noise | |
| The observation matrix at time | |
| Refer to the prior system covariance matrix in the EKF | |
| Refer to the posterior system covariance matrix in the EKF | |
| Refer to the gain matrix of the EKF | |
| Refer to the covariance matrix of the process noise in the EKF | |
| Refer to the covariance matrix of the observational noise vector in the EKF | |
| Refer to the position coordinate difference in the north | |
| Refer to the position coordinate difference in the east | |
| The innovation vector consisting of and , which represents the position coordinate difference between two methods in the EKF | |
| Refer to the covariance of the innovation vector in the EKF | |
| Refer to the distribution of the position coordinate in the north | |
| Refer to the distribution of the position coordinate in the east | |
| The distribution of the squared mahalanobis distance of the innovation vector | |
| The symbol of chi-square distribution with eh freedom | |
| The significance level of the distribution | |
| The robust vector defined in the paper which is utilized to modify the observation noise covariance matrix | |
| Refer to the modified observation noise covariance matrix |
References
- Zhang, W.; Hua, X.; Yu, K.; Qiu, W.; Zhang, S.; He, X. A novel WiFi indoor positioning strategy based on weighted squared Euclidean distance and local principal gradient direction. Sens. Rev. 2019, 39, 99–106. [Google Scholar] [CrossRef]
- Wei, S.; Min, X.; Hongshan, Y.; Hongwei, T.; Anping, L. Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar]
- Song, X.; Fan, X.; Xiang, C.; Ye, Q.; Liu, L.; Wang, Z.; He, X.; Yang, N.; Fang, G. A Novel Convolutional Neural Network Based Indoor Localization Framework With WiFi Fingerprinting. IEEE Access 2019, 7, 110698–110709. [Google Scholar] [CrossRef]
- Topak, F.; Pekeriçli, M.K.; Tanyer, A.M. Technological Viability Assessment of Bluetooth Low Energy Technology for Indoor Localization. J. Comput. Civ. Eng. 2018, 32, 04018034. [Google Scholar] [CrossRef]
- Chen, L.; Pei, L.; Kuusniemi, H.; Chen, Y.; Kröger, T.; Chen, R. Bayesian Fusion for Indoor Positioning Using Bluetooth Fingerprints. Wirel. Pers. Commun. 2013, 70, 1735–1745. [Google Scholar] [CrossRef]
- He, X.; Ye, D.; Peng, L.; Ruchuan, W.; Yizhu, L. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar]
- Zhang, D.; Yang, L.T.; Chen, M.; Zhao, S.; Guo, M.; Zhang, Y. Real-Time Locating Systems Using Active RFID for Internet of Things. IEEE Syst. J. 2016, 10, 1226–1235. [Google Scholar] [CrossRef]
- Khyam, M.O.; Rahim, N.-A.; Li, X.; Ritz, C.; Guan, Y.L.; Ge, S.S. Design of Chirp Waveforms for Multiple-Access Ultrasonic Indoor Positioning. IEEE Sens. J. 2018, 18, 6375–6390. [Google Scholar] [CrossRef]
- Lee, C.; Chang, Y.; Park, G.; Ryu, J.; Jeong, S.-G.; Park, S.; Park, J.W.; Lee, H.C.; Hong, K.-S.; Lee, M.H. Indoor positioning system based on incident angles of infrared emitters. In Proceedings of the 30th Annual Conference of IEEE Industrial Electronics Society, IECON 2004, Busan, Korea, 2–6 November 2004. [Google Scholar]
- Musa, A.; Nugraha, G.D.; Han, H.; Choi, D.; Seo, S.; Kim, J. A decision tree-based NLOS detection method for the UWB indoor location tracking accuracy improvement. Int. J. Commun. Syst. 2019, 32, e3997. [Google Scholar] [CrossRef]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A Novel NLOS Mitigation Algorithm for UWB Localization in Harsh Indoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 686–699. [Google Scholar] [CrossRef]
- Kee, C.; Yun, D.; Jun, H. Precise calibration method of pseudolite positions in indoor navigation systems. Comput. Math. Appl. 2003, 46, 1711–1724. [Google Scholar] [CrossRef][Green Version]
- Li, X.; Zhang, P.; Huang, G.; Zhang, Q.; Guo, J.; Zhao, Y.; Zhao, Q. Performance analysis of indoor pseudolite positioning based on the unscented Kalman filter. GPS Solut. 2019, 23, 79. [Google Scholar] [CrossRef]
- Aoran, X.; Ruizhi, C.; Deren, L.; Yujin, C.; Dewen, W. An Indoor Positioning System Based on Static Objects in Large Indoor Scenes by Using Smartphone Cameras. Sensors 2018, 18, 2229. [Google Scholar]
- Mulloni, A.; Wagner, D.; Barakonyi, I.; Schmalstieg, D. Indoor Positioning and Navigation with Camera Phones. IEEE Pervasive Comput. 2009, 8, 22–31. [Google Scholar] [CrossRef]
- Google. Wi-Fi Scanning Overview. Available online: https://developer.android.google.cn/guide/topics/connectivity/wifi-scan (accessed on 18 June 2021).
- Zhou, C.; Yuan, J.-Z.; Liu, H.; Qiu, J. Bluetooth Indoor Positioning Based on RSSI and Kalman Filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Cao, H.; Wang, Y.; Bi, J.; Qi, H. An Adaptive Bluetooth/Wi-Fi Fingerprint Positioning Method based on Gaussian Process Regression and Relative Distance. Sensors 2019, 19, 2784. [Google Scholar] [CrossRef]
- Wu, C.; Xu, J.; Yang, Z.; Lane, N.D.; Yin, Z. Gain without Pain: Accurate WiFi-based Localization using Fingerprint Spatial Gradient. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 1–19. [Google Scholar] [CrossRef]
- Gu, F.; Hu, X.; Ramezani, M.; Acharya, D.; Khoshelham, K.; Valaee, S.; Shang, J. Indoor Localization Improved by Spatial Context—A Survey. ACM Comput. Surv. 2019, 52, 1–35. [Google Scholar] [CrossRef]
- Kenn, H.; Behrens, N.; Kleiner, A. Optimizing indoor PDR performance with self-deployed position markers. In Proceedings of the 4th International Forum on Applied Wearable Computing 2007, Tel Aviv, Israel, 12–13 March 2007. [Google Scholar]
- Zuo, Z.; Liu, L.; Zhang, L.; Fang, Y. Indoor Positioning Based on Bluetooth Low-Energy Beacons Adopting Graph Optimization. Sensors 2018, 18, 3736. [Google Scholar] [CrossRef] [PubMed]
- Tian, Y.; Huang, B.; Jia, B.; Zhao, L. Optimizing AP and Beacon Placement in WiFi and BLE hybrid localization. J. Netw. Comput. Appl. 2020, 164, 102673. [Google Scholar] [CrossRef]
- Ng, P.C.; She, J.; Park, S. High Resolution Beacon-Based Proximity Detection for Dense Deployment. IEEE Trans. Mob. Comput. 2017, 17, 1369–1382. [Google Scholar] [CrossRef]
- Mackey, A.; Spachos, P.; Song, L.; Plataniotis, K.N. Improving BLE Beacon Proximity Estimation Accuracy Through Bayesian Filtering. IEEE Internet Things J. 2020, 7, 3160–3169. [Google Scholar] [CrossRef]
- Subhan, F.; Khan, A.; Saleem, S.; Ahmed, S.; Imran, M.; Asghar, Z.; Bangash, J.I. Experimental analysis of received signals strength in Bluetooth Low Energy (BLE) and its effect on distance and position estimation. Trans. Emerg. Telecommun. Technol. 2019. [Google Scholar] [CrossRef]
- Zhao, X.; Xiao, Z.; Markham, A.; Trigoni, N.; Ren, Y. Does BTLE measure up against wifi? A comparison of indoor location performance. In Proceedings of the 20th European Wireless Conference, EW 2014, Barcelona, Spain, 14–16 May 2014; pp. 263–268. [Google Scholar]
- Pakanon, N.; Chamchoy, M.; Supanakoon, P. Study on Accuracy of Trilateration Method for Indoor Positioning with BLE Beacons. In Proceedings of the 2020 6th International Conference on Engineering, Applied Sciences and Technology (ICEAST), Chiang Mai, Thailand, 1–4 July 2020; pp. 1–4. [Google Scholar]
- Bahl, P.; Padmanabhan, V.N. RADAR: An in-Building RF-Based User Location and Tracking System. In Proceedings of the IEEE INFOCOM 2000 Conference on Computer Communications, Nineteenth Annual Joint Conference of the IEEE Computer and Communications Societies (Cat. No.00CH37064), Tel Aviv, Israel, 26–30 March 2000; Volume 2, pp. 775–784. [Google Scholar]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. DeepFi: Deep learning for indoor fingerprinting using channel state information. In Proceedings of the 2015 IEEE Wireless Communications and Networking Conference (WCNC), New Orleans, LA, USA, 9–12 March 2015; Institute of Electrical and Electronics Engineers (IEEE): New York, NY, USA, 2015; pp. 1666–1671. [Google Scholar]
- Yan, H.; Shan, Q.; Furukawa, Y. RIDI: Robust IMU Double Integration. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018. [Google Scholar]
- Chen, C.; Lu, X.; Markham, A.; Trigoni, N. IONet: Learning to Cure the Curse of Drift in Inertial Odometry. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018. [Google Scholar]
- Herath, S.; Yan, H.; Furukawa, Y. RoNIN: Robust Neural Inertial Navigation in the Wild: Benchmark, Evaluations, & New Methods. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–1 August 2020; pp. 3146–3152. [Google Scholar]
- Liu, W.; Caruso, D.; Ilg, E.; Dong, J.; Mourikis, A.I.; Daniilidis, K.; Kumar, V.; Engel, J. TLIO: Tight Learned Inertial Odometry. IEEE Robot. Autom. Lett. 2020, 5, 5653–5660. [Google Scholar] [CrossRef]
- Sun, S.; Melamed, D.; Kitani, K. IDOL: Inertial Deep Orientation-Estimation and Localization. arXiv 2021, arXiv:2102.04024. [Google Scholar]
- Mezentsev, O.; Lachapelle, G.; Collin, J. Pedestrian dead reckoning—A solution to navigation in GPS signal degraded areas? Geomatica 2005, 59, 175–182. [Google Scholar]
- Jahn, J.; Batzer, U.; Seitz, J.; Patino-Studencka, L.; Boronat, J.G. Comparison and evaluation of acceleration based step length estimators for handheld devices. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–6. [Google Scholar] [CrossRef]
- You, Y.; Wu, C. Hybrid Indoor Positioning System for Pedestrians with Swinging Arms Based on Smartphone IMU and RSSI of BLE. IEEE Trans. Instrum. Meas. 2021, 70, 1–15. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Liu, C.; Zhang, L.; Li, Z. Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization. ISPRS Int. J. Geo-Inf. 2016, 5, 8. [Google Scholar] [CrossRef]
- Deng, Z.A.; Hu, Y.; Yu, J.; Na, Z. Extended Kalman Filter for Real Time Indoor Localization by Fusing WiFi and Smartphone Inertial Sensors. Micromachines 2015, 6, 523–543. [Google Scholar] [CrossRef]
- Atia, M.; Iqbal, U.; Givigi, S.; Noureldin, A.; Korenberg, M. Adaptive Integrated Indoor Pedestrian Tracking System Using MEMS sensors and Hybrid WiFi/Bluetooth-Beacons with Optimized Grid-based Bayesian Filtering Algorithm. In Proceedings of the 2015 International Technical Meeting of the Institute of Navigation, Dana Point, CA, USA, 26–28 January 2015. [Google Scholar]
- Yang, Y.; He, H.; Xu, G. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Yang, Y.; Song, L.; Xu, T. Robust estimator for correlated observations based on bifactor equivalent weights. J. Geod. 2002, 76, 353–358. [Google Scholar] [CrossRef]
- Chang, G. Robust Kalman filtering based on Mahalanobis distance as outlier judging criterion. J. Geod. 2014, 88, 391–401. [Google Scholar] [CrossRef]
- Li, Z.; Liu, C.; Gao, J.; Li, X. An Improved WiFi/PDR Integrated System Using an Adaptive and Robust Filter for Indoor Localization. Int. J. Geo-Inf. 2016, 5, 224. [Google Scholar] [CrossRef]
- Shaowei, L.; Xianghong, H.; Weining, Q.; Ying, S.; Kang, W.; Xuesheng, P. The effects of AP number on WiFi fingerprint positioning. Eng. Surv. Mapp. 2017, 26, 33–36. [Google Scholar]
- Gu, F.; Khoshelham, K.; Shang, J.; Yu, F.; Wei, Z. Robust and Accurate Smartphone-Based Step Counting for Indoor Localization. IEEE Sens. J. 2017, 17, 3453–3460. [Google Scholar] [CrossRef]
- Yuan, Z.; Haiyu, L.; You, L.; Naser, E.S. PDR/INS/WiFi Integration Based on Handheld Devices for Indoor Pedestrian Navigation. Micromachines 2015, 6, 793–812. [Google Scholar]
- Rai, A.; Chintalapudi, K.; Padmanabhan, V.; Sen, R. Zee: Zero-effort crowdsourcing for indoor localization. In Proceedings of the 18th Annual International Conference on Mobile Computing and Networking, Istanbul, Turkey, 22–26 August 2012. [Google Scholar] [CrossRef]
- Sun, M.; Wang, Y.; Xu, S.; Cao, H.; Si, M. Indoor Positioning Integrating PDR/Geomagnetic Positioning Based on the Genetic-Particle Filter. Appl. Sci. 2020, 10, 668. [Google Scholar] [CrossRef]
- Ladetto, Q. On foot navigation: Continuous step calibration using both complementary recursive prediction and adaptive Kalman filtering. In Proceedings of the 13th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 2000), Salt Lake City, UT, USA, 19–22 September 2000. [Google Scholar]
- Vildjiounaite, E.; Malm, E.-J.; Kaartinen, J.; Alahuhta, P. Location Estimation Indoors by Means of Small Computing Power Devices, Accelerometers, Magnetic Sensors, and Map Knowledge. Comput. Vis. 2002, 2414, 211–224. [Google Scholar] [CrossRef]
- Weinberg, H. Using the ADXL202 in pedometer and personal navigation applications. Analog Devices AN-602 Appl. Note 2002, 2, 1–6. [Google Scholar]
- Liu, J.; Chen, R.; Pei, L.; Guinness, R.; Kuusniemi, H. A Hybrid Smartphone Indoor Positioning Solution for Mobile LBS. Sensors 2012, 12, 17208–17233. [Google Scholar] [CrossRef]
- Wang, H.; Sen, S.; Elgohary, A.; Farid, M.; Youssef, M.; Choudhury, R.R. No need to war-drive: Unsupervised indoor localization. In Proceedings of the 10th International Conference on Mobile Systems, Applications, and Services, Low Wood Bay, UK, 26–28 June 2012. [Google Scholar] [CrossRef]
- Mahony, R.; Hamel, T.; Pflimlin, J.-M. Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Autom. Control 2008, 53, 1203–1218. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Min | Max | Mean | RMSE |
|---|---|---|---|---|
| BLE fingerprint method | 0.005 | 18.289 | 2.834 | 3.106 |
| Eliminating the less scanned BLE number | 0.005 | 18.289 | 2.312 | 2.042 |
| Method | Min | Max | Mean | RMSE |
|---|---|---|---|---|
| BLE fingerprint method | 0.165 | 13.033 | 2.647 | 2.727 |
| Extend Kalman filter method | 0 | 7.122 | 1.960 | 1.727 |
| Robust filter base on EKF | 0 | 2.641 | 0.844 | 0.745 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, S.; Wang, Y.; Sun, M.; Si, M.; Cao, H. A Real-Time BLE/PDR Integrated System by Using an Improved Robust Filter for Indoor Position. Appl. Sci. 2021, 11, 8170. https://doi.org/10.3390/app11178170
Xu S, Wang Y, Sun M, Si M, Cao H. A Real-Time BLE/PDR Integrated System by Using an Improved Robust Filter for Indoor Position. Applied Sciences. 2021; 11(17):8170. https://doi.org/10.3390/app11178170
Chicago/Turabian StyleXu, Shenglei, Yunjia Wang, Meng Sun, Minghao Si, and Hongji Cao. 2021. "A Real-Time BLE/PDR Integrated System by Using an Improved Robust Filter for Indoor Position" Applied Sciences 11, no. 17: 8170. https://doi.org/10.3390/app11178170
APA StyleXu, S., Wang, Y., Sun, M., Si, M., & Cao, H. (2021). A Real-Time BLE/PDR Integrated System by Using an Improved Robust Filter for Indoor Position. Applied Sciences, 11(17), 8170. https://doi.org/10.3390/app11178170