1. Introduction
Autonomous underwater vehicles (AUVs) have been widely used for various purposes, e.g., military, commercial, and marine scientific survey applications [
1]. For different purposes and scenarios, the requirement for the localization and control accuracy of AUVs ranges from meters to hundreds of meters. Compared to manned underwater vehicles, AUVs have no human pilots on board and thus avoid being exposed to dull and dangerous underwater environments. Compared to the tethered unmanned underwater vehicles, i.e., remotely operated vehicles (ROVs) [
2], AUVs are tether free and thus can reach wider ocean spaces without the technical issues brought by the tether cable. The perception–plan–action cycle [
3] is achieved by AUVs without persistent human instructions in order to accomplish the programmed missions. However, in the underwater environment, the attenuation rate of the global positioning system (GPS) signals is high, which makes GPS not applicable. Moreover, the ubiquitous ocean currents pose great influences on the relatively slow-moving AUVs. These factors impede the realization of the autonomy of AUVs.
In general, there are two types of localization methods underwater, i.e., distance independent methods and distance dependent methods [
4]. Distance independent methods estimate the positions of underwater targets based on the topology of several beacon nodes. The most commonly used distance dependent methods include received signal strength indicator, time difference of arrival (TDOA), and time of arrival (TOA). They differ in the distance calculation processes. Multipath and shadow fading effects are usually concerned with the received signal strength indicator method. TOA methods use fewer fixed nodes than TDOA methods and are easier for implementation. The widely used base line localization methods are developed from TOA methods [
5]. In TOA, the target position can be directly calculated based on the triangulation principle [
6]. TOA has the advantages of low computational complexity and low cost. However, precise synchronization in-between subsurface nodes is often required which is hardly available in ocean applications considering the cost and power constraints. Besides, measurement noises play an important role in the localization accuracy. Improvement techniques such as the least square method and Kalman filter [
7] have been proposed to overcome this issue. An extended Kalman filter (EKF) is designed to handle the measurement noises for a GPS intelligent buoy (GIB)-like system in underwater target tracking [
8]. Experimental results show that the trajectory of the underwater target can be recovered well with the EKF based approach.
Besides the localization issue, another difference between AUVs and ground or airborne robots is that the influence of the dense ocean current flow cannot be neglected [
9]. Therefore, various regional ocean models that generate realistic ocean current fields have been developed and used for AUV simulations [
10]. For AUVs that operate in coastal regions, considering the collision risks with ships and land, ref. [
11] utilizes the probabilistic ocean current predictions in the path planning of AUVs to improve the safety and reliability with stochastic approaches. By modeling the ocean current as a vector valued function of space and time, the current flow field is described as an Eulerian map in [
10]. The Eulerian map then provides inputs to a planning and control module to optimize metrics such as energy consumption and path lengths. Instead of using the predicted ocean current values, another approach is to treat ocean current as environmental disturbances directly. Soft sensors, i.e., “observers”, are designed in [
9,
12] to achieve integrated current estimation and AUV motion control performance. In [
13], in order to compensate for the steady-state error caused by the presence of ocean current, an adaptive/integral proportional derivative controller is designed for AUVs. The integral action has also been commented in [
14] and is demonstrated to be a useful technique to achieve zero steady-state errors for systems with disturbances. Moreover, Kalman filter or EKF [
15,
16] is also commonly used for filtering general disturbances and estimating the motion states of marine robots. The estimated states can then be used for controller design assuming the “separation” principle holds so that the controller and observer could be designed separately.
With the information on localization and ocean current, the controller computes the input to the AUV system so as to achieve certain tasks. The most widely implemented controller is proportional-integral-derivative (PID) [
13] due to its simplicity. More recent PID variants are usually equipped with gain scheduling [
17] or fuzzy logic [
18] designs to deal with nonlinearities. Lyapunov-based techniques such as backstepping [
19] and sliding mode control [
20] are also frequently used in AUV control to handle nonlinearities and guarantee convergence. However, these methods are often associated with tedious tuning procedures, and the control performance differs when the environment, load, or tasks change. Besides, control metrics and system constraints cannot be handled. In addition to systematically handling system constraints and optimizing performance, model predictive control (MPC) is inherently robust to disturbances to a certain degree [
21]. MPC is applied to the AUV docking scenario in [
22]. In [
23], a series of MPC controllers are proposed to the AUV path following problem, and closed-loop system stability is guaranteed theoretically. A sliding mode control, a filtered Smith predictor, and an MPC controller are integrated in [
24] to deal with disturbances, dead time, and constraints, respectively. However, most of the control problems assume the availability of the localization information of AUV, which is not practical.
In this paper, we consider the localization and control problem of AUVs simultaneously. In the absence of GPS signals, an acoustic localization method based on three surface buoys is first proposed. The three buoys emit acoustic signals periodically from the surface. The different times of arrivals of these signals at the AUV can then determine an estimated position of the AUV upon the receiving of the third signal in a localization cycle. Regarding the noises in the estimated positions, the unavailability of the velocity states, and the uncertainties due to the ocean current, an EKF approach is proposed to provide an estimate of the system’s full state. With the estimated system states, MPC is applied to track a reference trajectory. System physical constraints and control performance are explicitly considered. Since the localization and control have different sampling times, the dead-reckoning technique is utilized with detailed AUV dynamics. In the MPC controller design, to relieve the possible computational burden, the AUV dynamics are simplified through successive linearizations. Briefly, this paper contributes to the state of the art in the following aspects:
a novel integrated acoustic localization and predictive tracking control approach is proposed for AUVs;
the uncertainties in localization and ocean currents are handled together systematically using EKF;
the approach of successive linearizations is applied to AUVs for computational efficiency. Simulation results demonstrate the effectiveness of the proposed algorithms for AUVs.
The remainder of the paper is organized as follows.
Section 2 presents the AUV dynamic model and the tracking control problem statement. Then in
Section 3, the acoustic localization method is proposed. The tracking control based on successively linearized prediction models, state estimation with EKF and MPC are further proposed in
Section 4.
Section 5 presents simulation results and discussions, followed by concluding remarks and future research considerations in
Section 6.
3. Acoustic Localization
Taking advantage of the finite propagation speed of sound in water and the availability of GPS or global navigation satellite system (GNSS) signals [
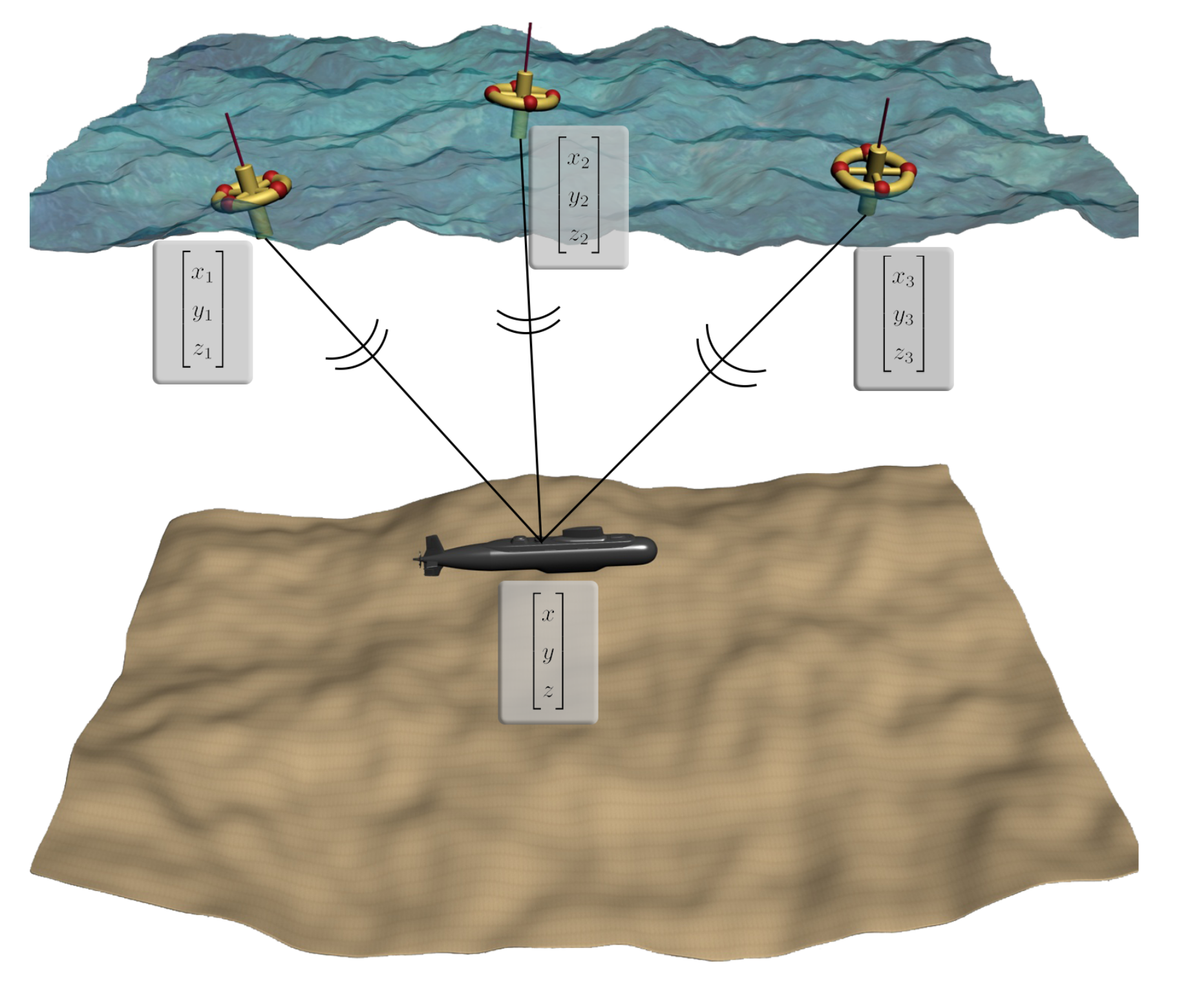
26] over the ocean surface, we deploy three surface buoys with known positions
,
, as shown in
Figure 2. However, the underwater velocity of sound is generally not constant but varies with the water pressure, temperature, and conductivity. Therefore, the propagation path of the sound is actually curved, which leads to non-random deviations of signal arrival times. To overcome this difficulty, the ray tracing technique [
27] with isogradient sound speed profiles (SSP) is utilized in the AUV acoustic localization problem.
Consider the scenario that each of the three buoys carries a pinger and emits acoustic signals every
seconds. Denote the position of AUV as
at time
t. Since the depth of underwater vehicles can be accurately measured with a depth sensor [
28], we consider the AUV to move at a known constant depth of
z meters. The clocks of the three buoys and the AUV can be synchronized with either GPS or lower power atomic clocks. For the ray tracing problem between the surface buoys and the AUV, the SSP is dependent on the water depth as:
where
c is the sound speed,
a is a constant depending on the underwater environment, and
b is the sound speed at the surface. Then, the TOAs of the signals from the three buoys at the AUV, denoted as
,
, can be calculated in simulations as [
27]:
where
stands for the actual horizontal distance between buoy
n and the AUV;
,
and
are the intermediate variables;
is the angle between the actual sound ray and the straight line path for buoy
n;
is the angle between the horizontal direction and the straight line path for buoy
n. Lastly,
and
are the grazing ray angles at buoy
n and the AUV, respectively.
In simulations, TOAs
,
can be calculated as Equation (
16), and in practice, they can be measured with synchronized clocks. Then, with the known TOAs, AUV depth
z, and the fixed buoy locations, the horizontal distance
could be estimated reversely using algorithms such as the binary search [
27]. The main idea is to compare the arrival time of the median point with the actual propagation time repeatedly so that the search area could be narrowed down until a precise enough horizontal distance estimate
is found.
Next, we are able to obtain the position of the AUV with
. If in one signal emit–receive cycle, the AUV is moving slowly and the position is assumed to be the same when the three signals from buoys 1, 2, and 3 are received, then we can get a set of nonlinear equations as:
by solving which we get the acoustically estimated position
of the AUV. Note that in practice, only two equations are necessary to be solved for
. Available functions such as
fsolve using trust-region algorithm in Matlab [
29] can be applied to solve Equation (
17).
If the AUV horizontal heading is measured by on board sensors such as the inertial measurement unit as
, the AUV horizontal pose can be obtained as:
which can be seen as the “measured” system output. In the underwater environment, signal-to-noise ratio (SNR) is usually used to describe the quality of the received signals. High SNR of the received signals means more accurate TOAs, which leads to high localization accuracy. Therefore, due to the uncertainties in measured TOAs, the surface buoy positions
, and the yaw angle measurement system, the “measured” AUV output
is assumed to be subject to random noises
where
is an
vector, and the covariance
with
,
, and
being the corresponding standard deviations.
5. Simulation Results and Discussions
Simulations are run to demonstrate the effectiveness of the proposed tracking control algorithms for AUVs. The proposed integrated localization and control algorithm is applied in following a reference path. Such applications can be seen in sea mapping scenarios where only waypoints in the concerned ocean region are given. The AUV is positioned at the initial point
m and is controlled to reach the destination
m along the following curved reference path
for
s. The three surface buoys are positioned at
m,
m, and
m, respectively. The isogradient SSP parameters in (
7) are set as:
and
m/s. In this region, ocean currents exist. The average speed is predicted to be 0.5 m/s and the angle is predicted to be
/6. However, there might be prediction biased errors. In the simulations, we will first validate the performance of the proposed integrated localization and tracking control algorithm with zero prediction biased errors, i.e.,
and
. Then, to illustrate the inherent robustness (to a certain degree) of the feedback due to acoustic localization, we also consider non-zero prediction biased errors with
m/s and
rad. Note that the biased errors are not considered explicitly in the algorithm design, and are only implemented for simulation purposes to show the inherent robustness due to the feedback from the acoustic localization. Moreover, there exist uncertainties with the predicted values following the normal distribution with covariance
, which means low prediction accuracy in the ocean current. It should be noted that AUVs with any design may fail at those worst predictions of the sea. The uncertain acoustic measurement is with covariance
. The AUV depth is 300 m, and the buoy depths are all 0 m. Controller parameters are set as follows: prediction horizon
; weight parameter
and
; sampling time
s and
s, which means the system feedback states are corrected by the acoustic localization results every two control time steps, i.e.,
n = 2 in Algorithm 1. Physical system constraints are:
2 m/s,
= 86 N, and
= 13.6
rad. The REMUS AUV system parameter values are referred to [
25]. Note that the practical parameter values might be different from the above set values. For adverse environmental situations, the algorithm might not be applicable. All the algorithms are implemented in MATLAB 2016b [
29] with solver Cplex [
32] on a platform with Intel(R) Core(TM) i3-7100 CPU @ 3.70 GHz.
5.1. Tracking Control with Acoustic Localization
5.1.1. Localization Results
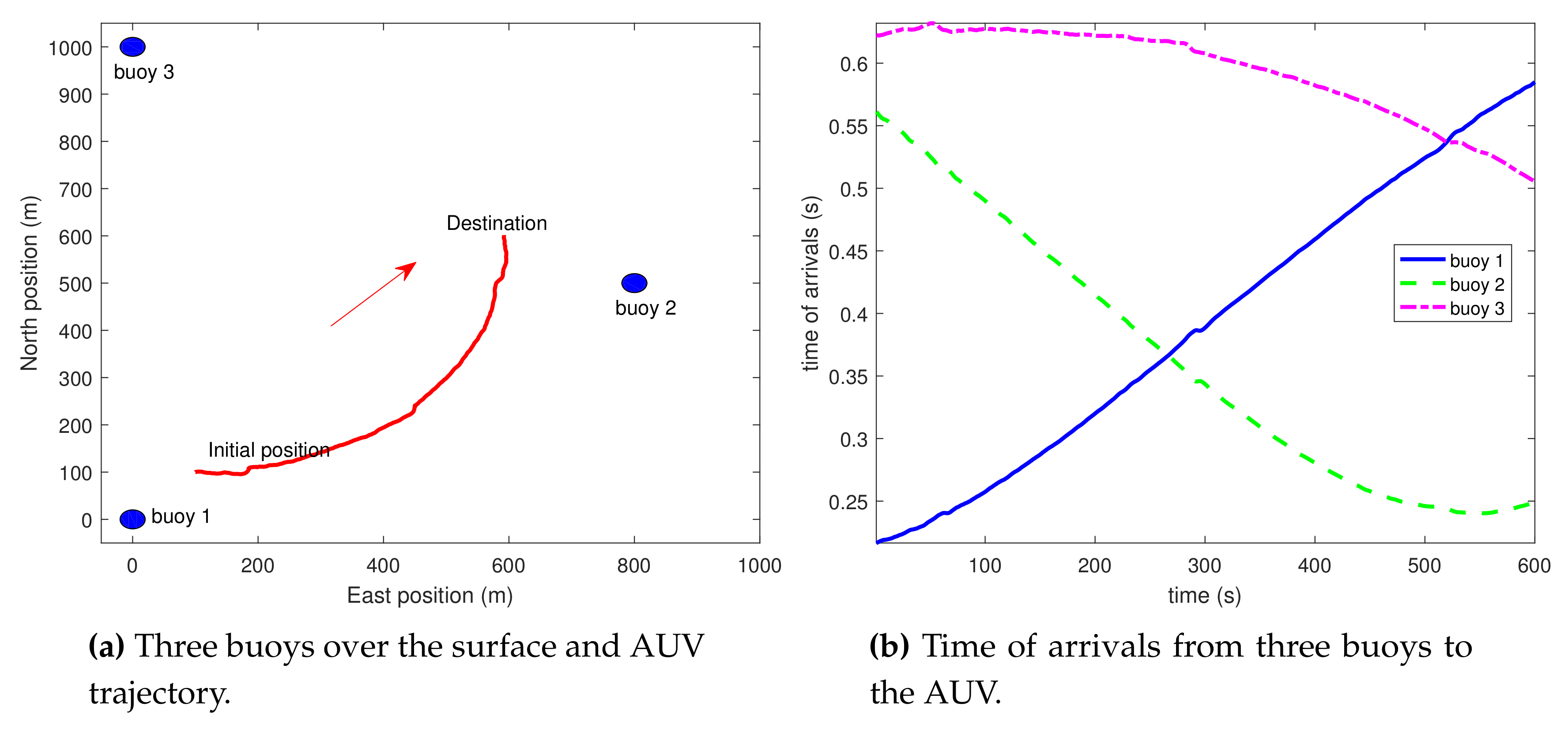
For the considered scenario, the three buoys are localized at the surface as shown in
Figure 3a. The TOAs of the signals from the three buoys calculated by Equations (
8)–(
16) considering the isogradient SSP Equation (
7) are plotted in
Figure 3b. Since
s, there are a total 600 TOAs being calculated for each buoy. As the AUV moves from the initial position to the destination, the distance between the AUV and buoy 1 is increasing while the distances between the AUV and buoys 2 and 3 are decreasing. Therefore, it is observed in
Figure 3b that the TOA trajectory of buoy 1 ascends while the other two trajectories descend. Note that since the AUV approaches towards buoy 2 faster than buoy 3, the TOA trajectory of buoy 2 declines also more rapidly than that of buoy 3.
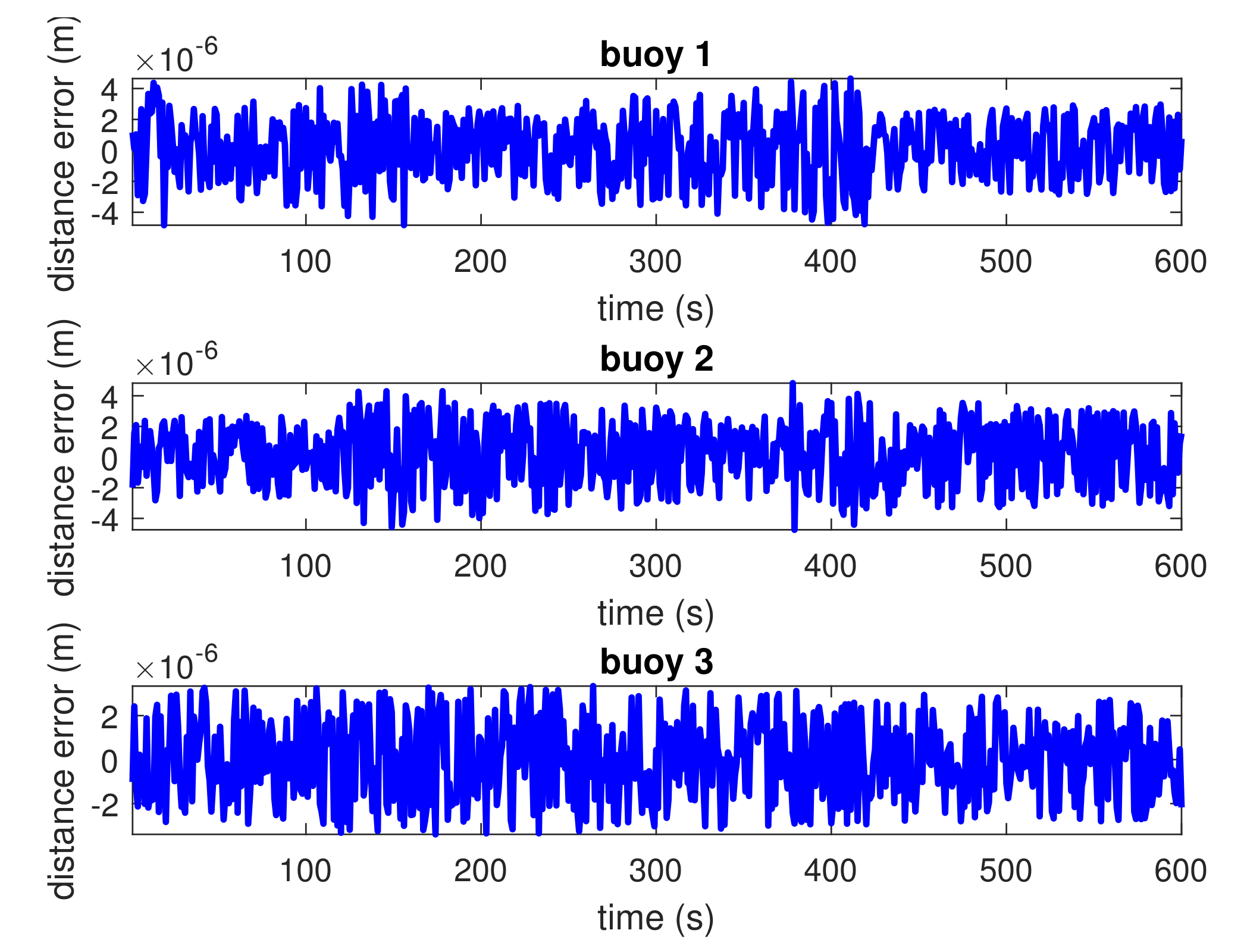
Figure 4 further shows the distance errors between the real horizontal distances
and the estimated horizontal distances
as calculated with a binary search algorithm [
27]. Small distance errors are observed. The micrometer magnitude in
Figure 4 is because the threshold specified in the binary search algorithm for the estimated horizontal distance is set to
. The binary search algorithm makes trade-offs in terms of speed and accuracy.
5.1.2. Tracking Control Results without Prediction Biased Errors
For the MPC controller design, system state feedback is necessary at each time step as in Equation (
33). However, due to the uncertainties in system dynamics and measurements, only estimated system states from EKF or predicted system states from dead-reckoning with nominal system dynamics can be utilized.
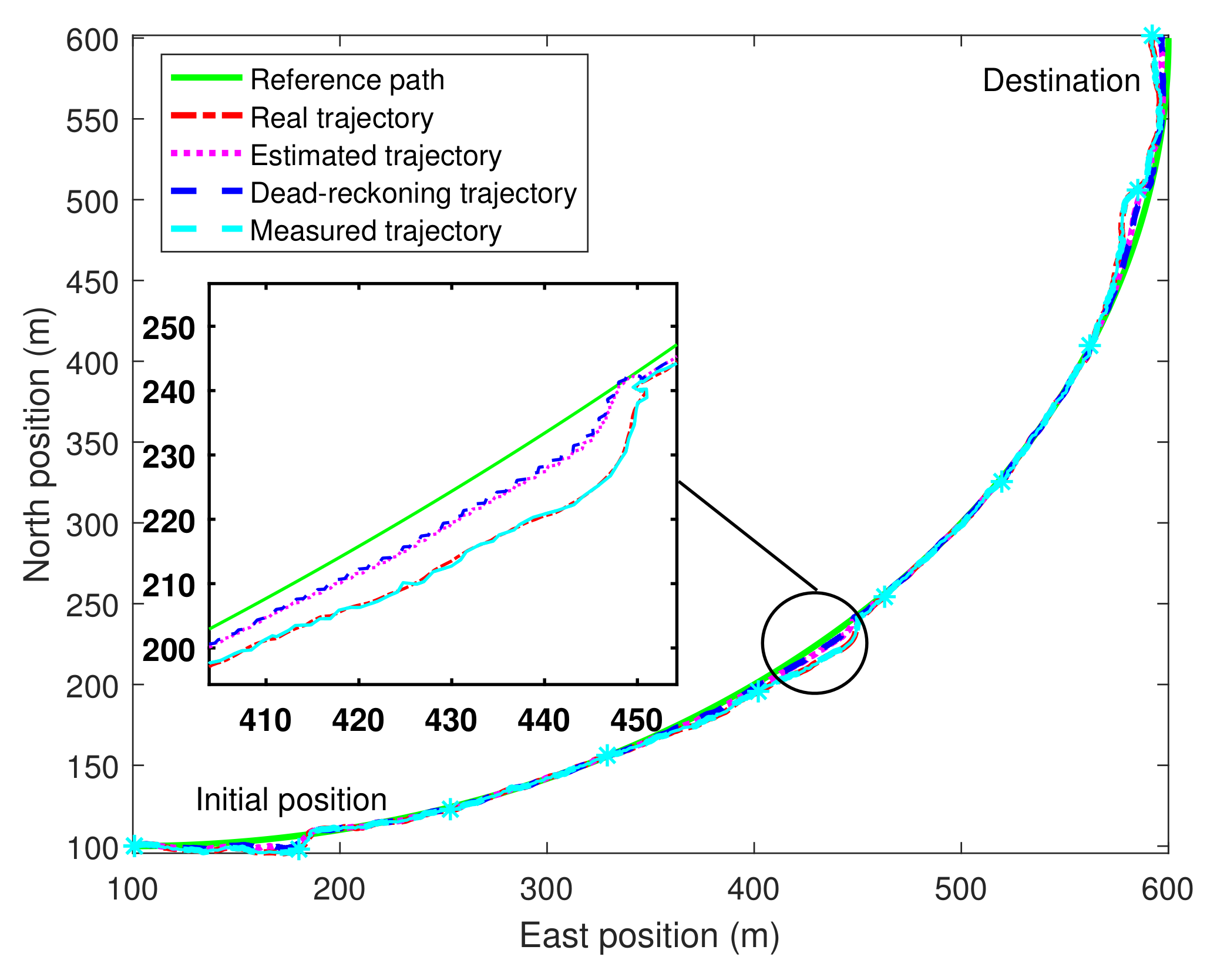
Figure 5 shows that the proposed algorithm can achieve the trajectory tracking goal and control the AUV moving from the initial position to the destination along the path. In
Figure 5, five trajectories are plotted in total:
Overall, the differences among these trajectories are small. Therefore, a zoom-in around position (300, 300) m is added. The root-mean-square-error for tracking the reference path is 5.59 m which is qualified in applications such as large-area ocean mapping. Note that the estimated trajectory and the measured trajectory are plotted with fewer position points than the dead-reckoning trajectory since the control cycle is faster than the acoustic localization cycle.
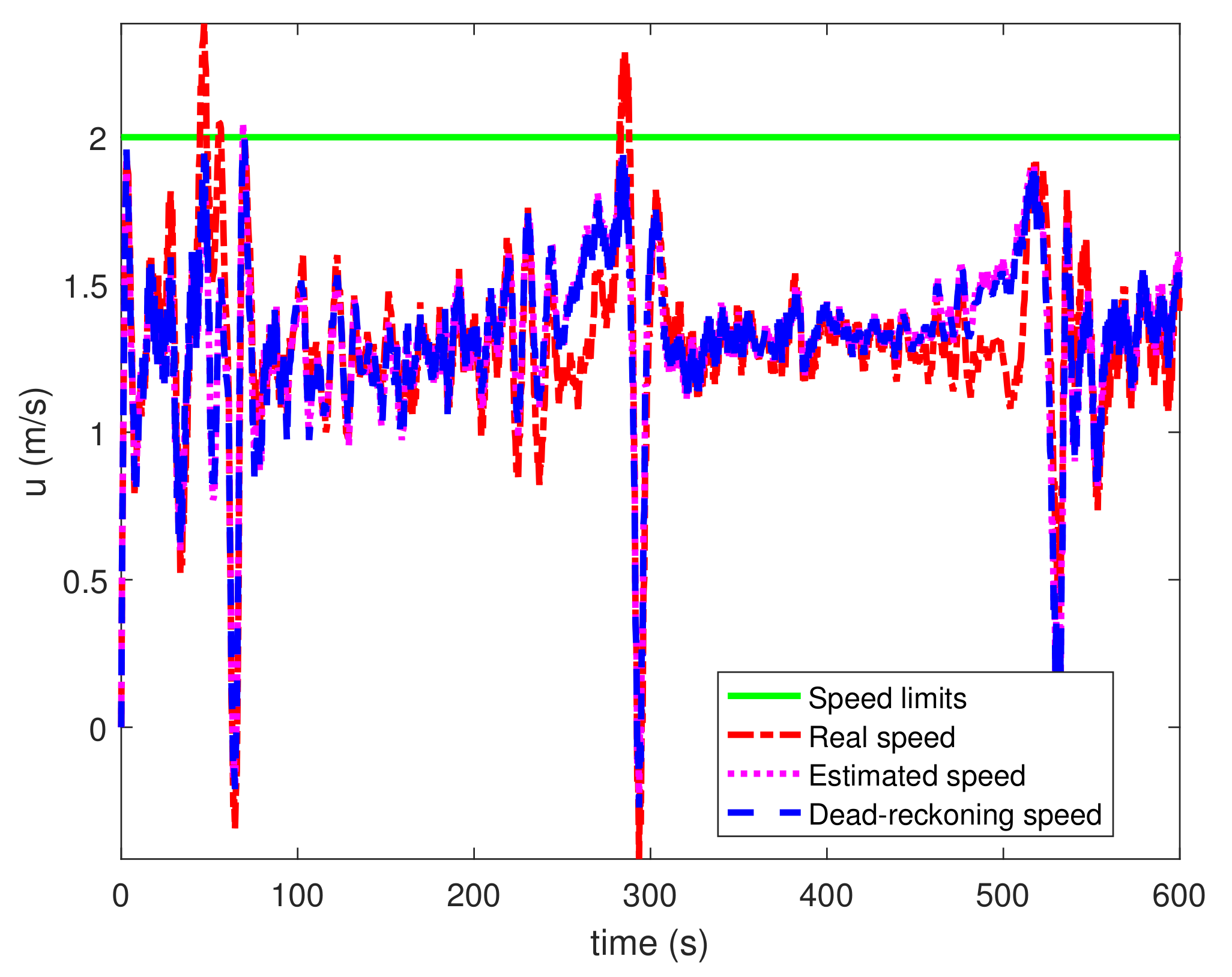
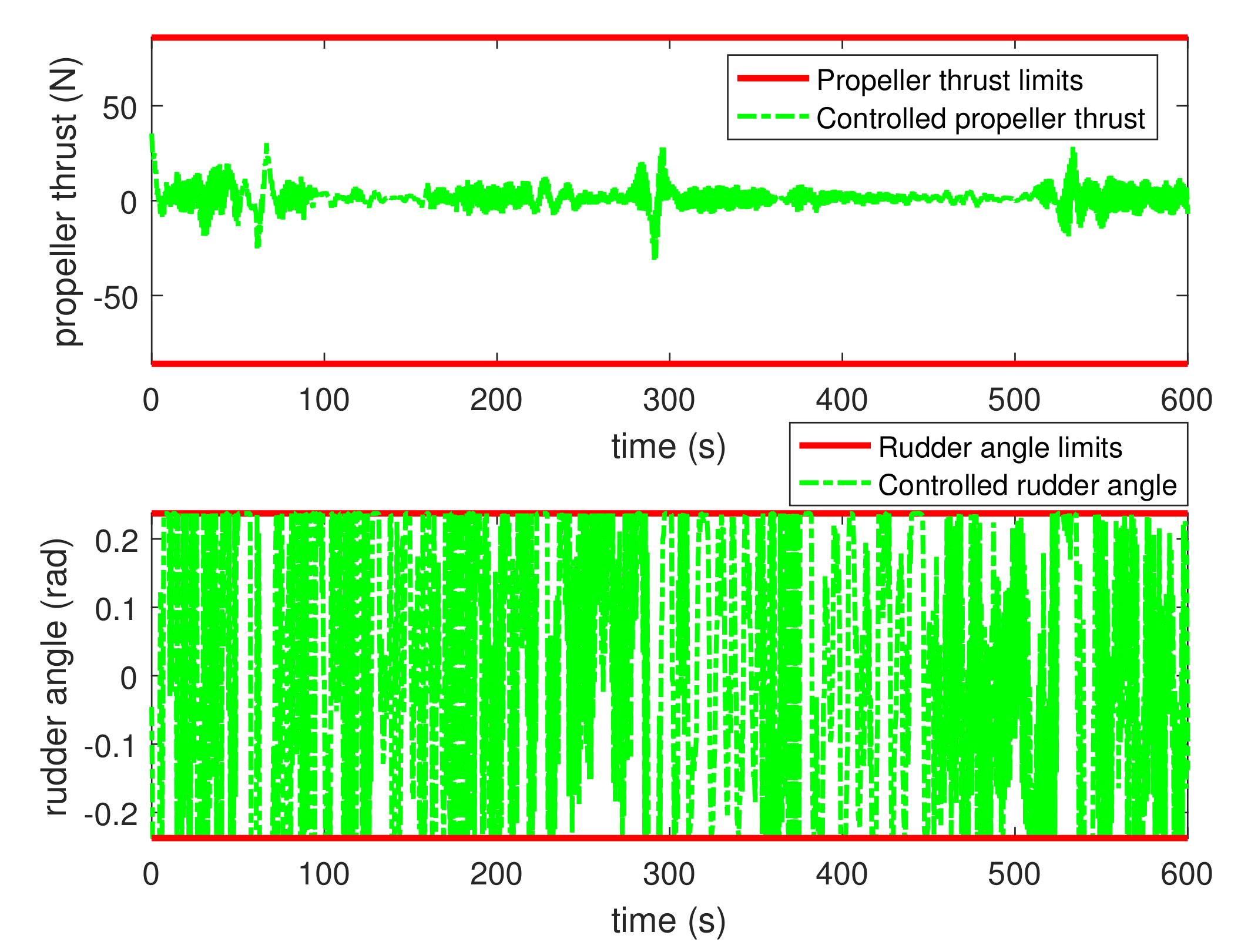
Figure 6 and
Figure 7 show the speed and control input trajectories, respectively. The control inputs, i.e., the propeller thrust and the rudder angle, computed by solving the optimization problem Equation (
32) subject to Equations (
22), (
33)–(
36) all satisfy the system constraints. However, for the speed trajectory, the dead-reckoning speed trajectory satisfies the constraints well while small violations of the real and estimated trajectories with respect to the speed limits are observed. This is because both the optimization problem Equation (
32) subject to Equations (
22), (
33)–(
36) and the dead-reckoning trajectory use the nominal system dynamics without uncertainties. If all the constraints Equations (
22), (
33)–(
36) are satisfied in the optimization problems, the dead-reckoning trajectory will also satisfy the constraints. However, compared to the dead-reckoning trajectory, the real trajectory further incorporates the uncertainties in ocean currents, and the estimated trajectory further incorporates the uncertainties in measurements. These uncertainties push the dead-reckoning trajectories that are already on the constraint boundary out of the feasible zone. Approaches such as buffer zone design in [
31] can be applied to deal with this issue. Note that the differences between the estimated and dead-reckoning speed trajectories are small, and the root-mean-square-root value between these two trajectories is 0.03 m/s. This difference demonstrates the correction capability of the EKF as in Equation (
26).
To relieve the potential computational burden of the MPC online optimization problems, successively linearized prediction models Equation (
22) are used. Therefore, only linear programming online problems need to be solved.
Figure 8 shows the solver times of the proposed tracking controller. Mostly throughout the simulation, the solver times are between 10 ms to 20 ms, and are smaller than the system control sampling time
s, which indicates the potential of the proposed algorithm for real-time applications.
5.1.3. Tracking Control Results with Prediction Biased Errors
When there are biased errors in the predicted ocean current information, due to the inherent robustness of the MPC feedback control by using the updated states from acoustic localization, the AUV can still follow the reference path, as shown in
Figure 9. However, compared to
Figure 5 where there are no prediction biased errors, the AUV trajectory sees larger fluctuations. The root-mean-square-error for the reference tracking increases to 6.17 m compared to 5.59 m in the case of no biased errors. The larger tracking errors are partly due to the modeling errors, i.e., the error between the model used for the controller design and the model used for simulations. Furthermore, we also run a simulation where no ocean current information is used in the controller design, i.e., the predicted mean current speed, angle, and their covariances are all set to zero in the controller. In this case, infeasibilities occur and the simulation could not continue. Therefore, a proper consideration of the influence of ocean currents is necessary.
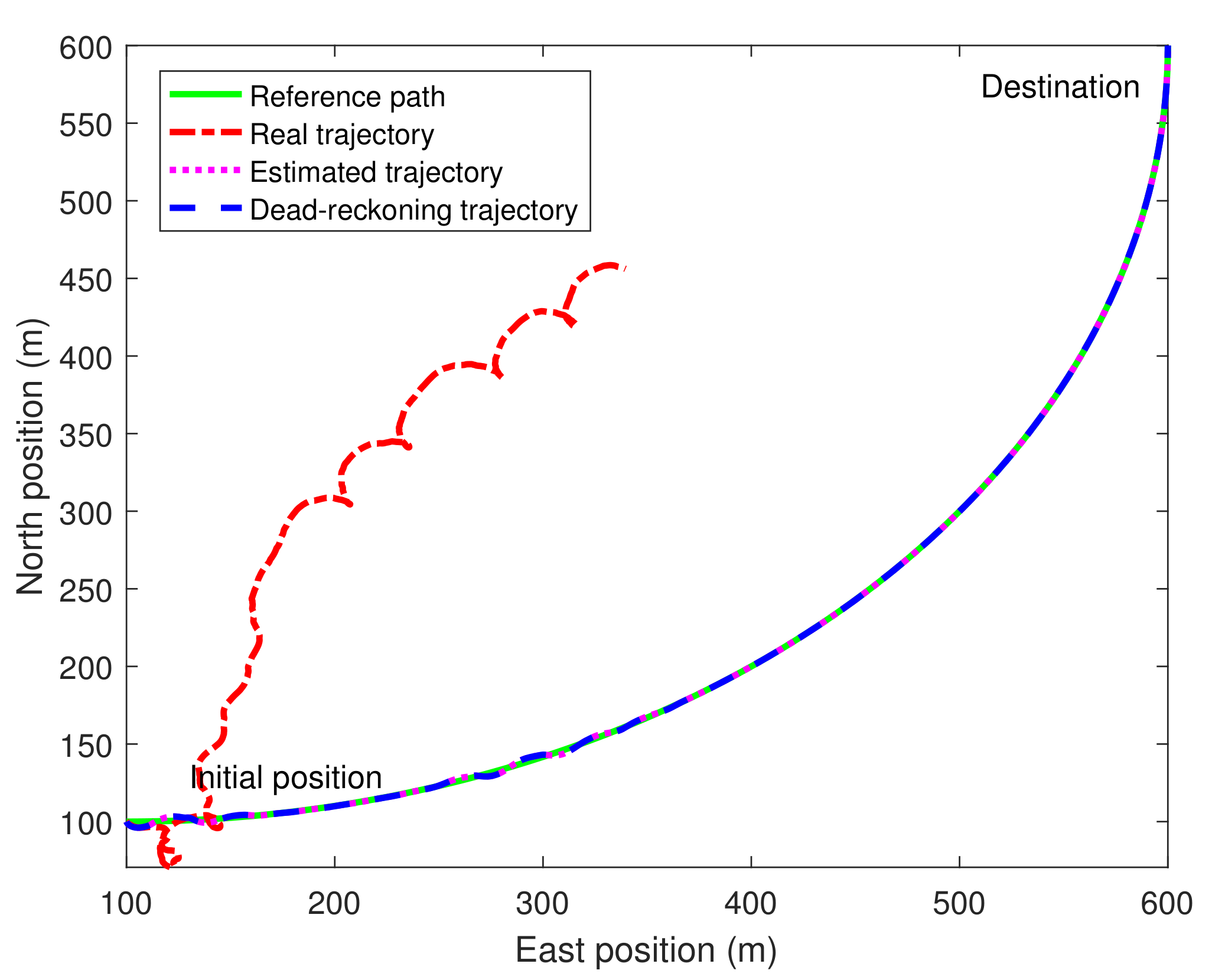
5.2. Tracking Control without Acoustic Localization
In order to demonstrate the role of acoustic localization for the AUV tracking control, we also run a set of simulations without acoustic localization. The system states used for MPC feedback are purely provided by the dead-reckoning module. This is the case when the AUV is not equipped with any positioning devices in an underwater environment. In this case, the AUV can never even reach the destination. Therefore, we set the simulation time the same as in the case with acoustic localization, and the tracking results are shown in
Figure 10. It can be observed that the trajectory deviates far away from the reference path. The tracking task fails which means the tracking control algorithm with purely dead-reckoning is not acceptable in practical applications. Compared with
Figure 5,
Figure 10 further demonstrates the effectiveness of the proposed integrated acoustic localization and tracking control approach. Note that since no acoustic localization feedback is used, there is no measured trajectory and the estimated trajectory coincides with the dead-reckoning trajectory. Moreover, since now the controller is purely based on the dead-reckoning states which are subject to no disturbances, the dead-reckoning trajectory can follow the reference path well.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}