
Research on Semi-Physical Simulation Testing of Inter-Satellite Laser Interference in the China Taiji Space Gravitational Wave Detection Program

 , ,
, ,
Abstract
1. Introduction
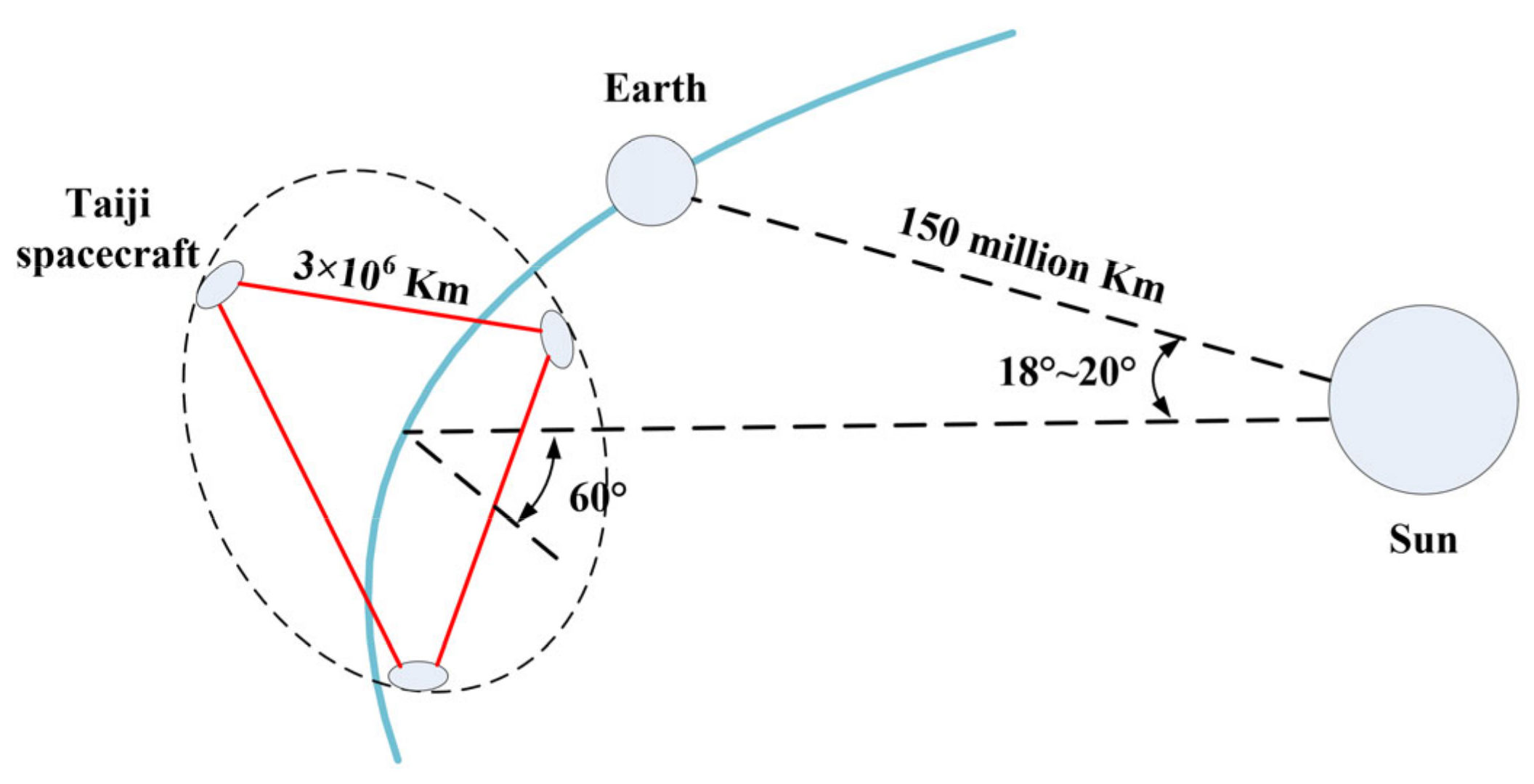
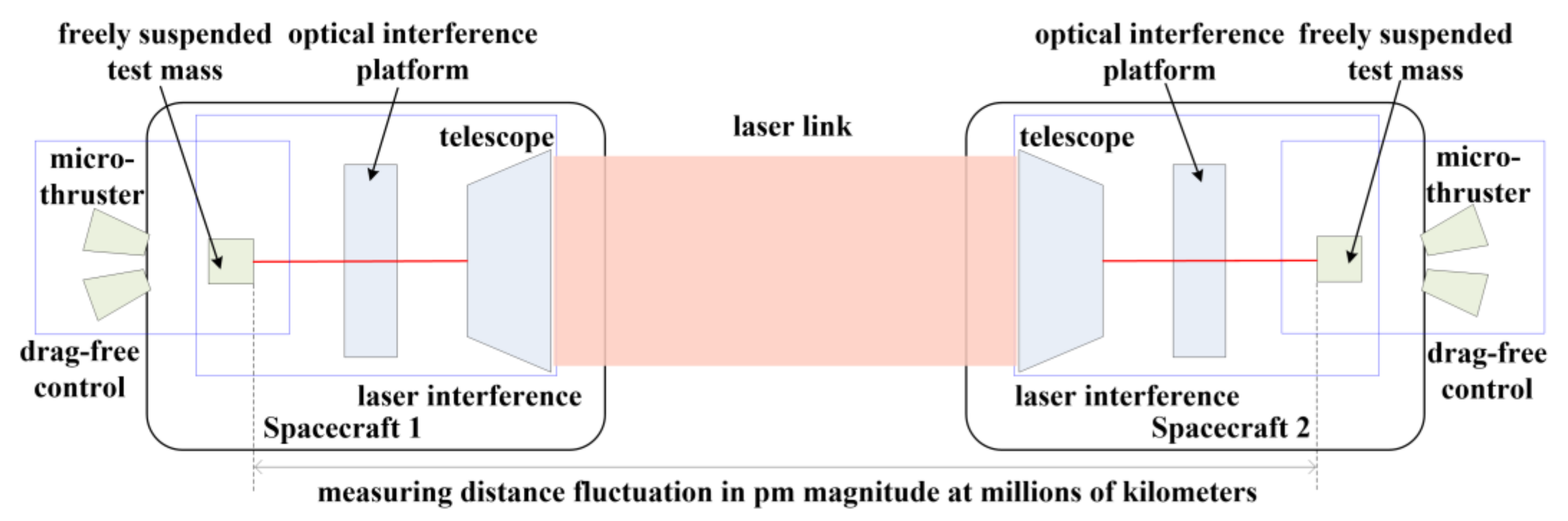
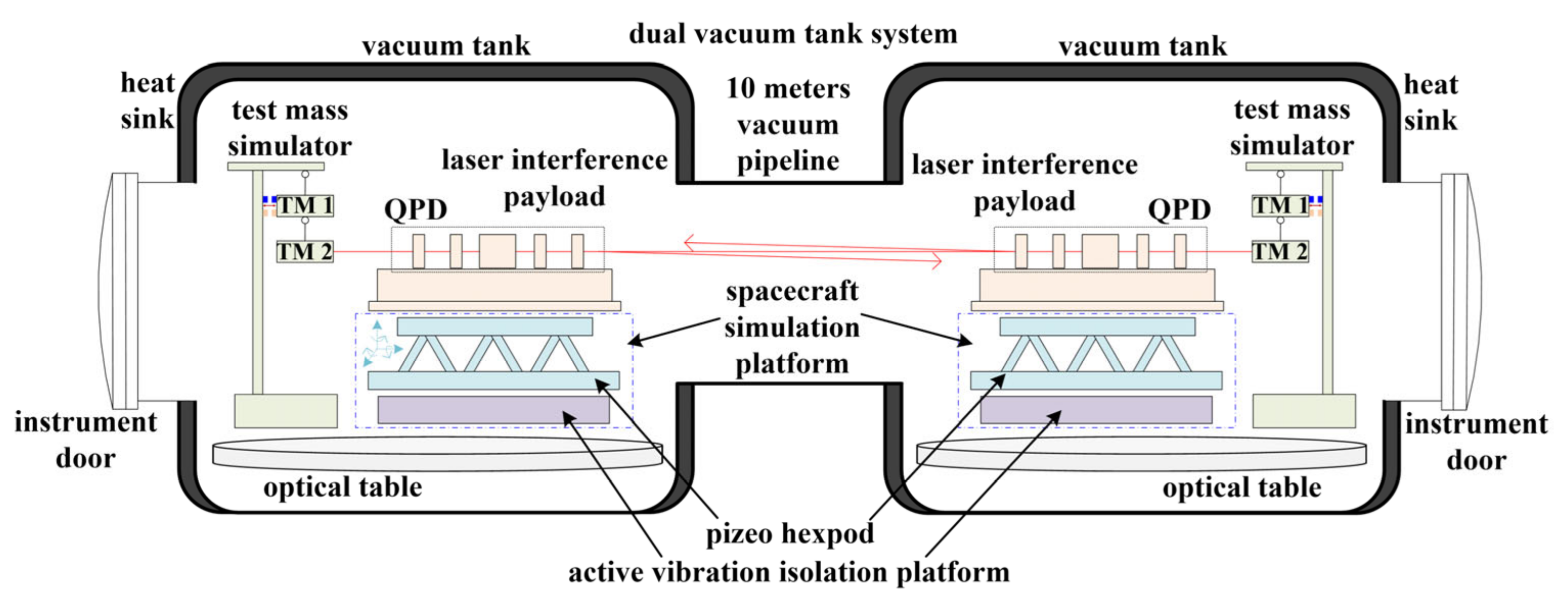
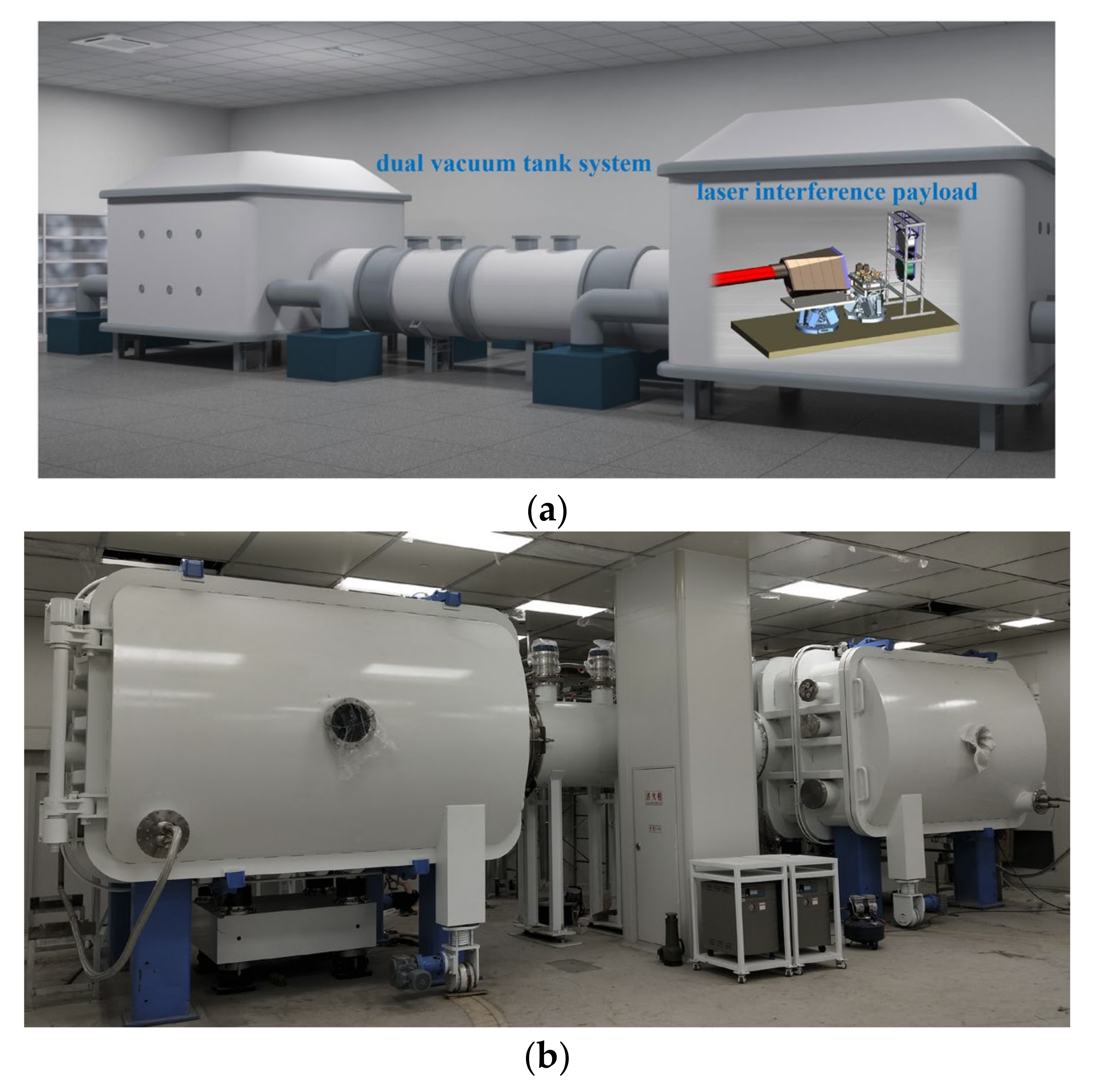
2. Mission Requirements and Experimental Platform
3. Analysis and Design
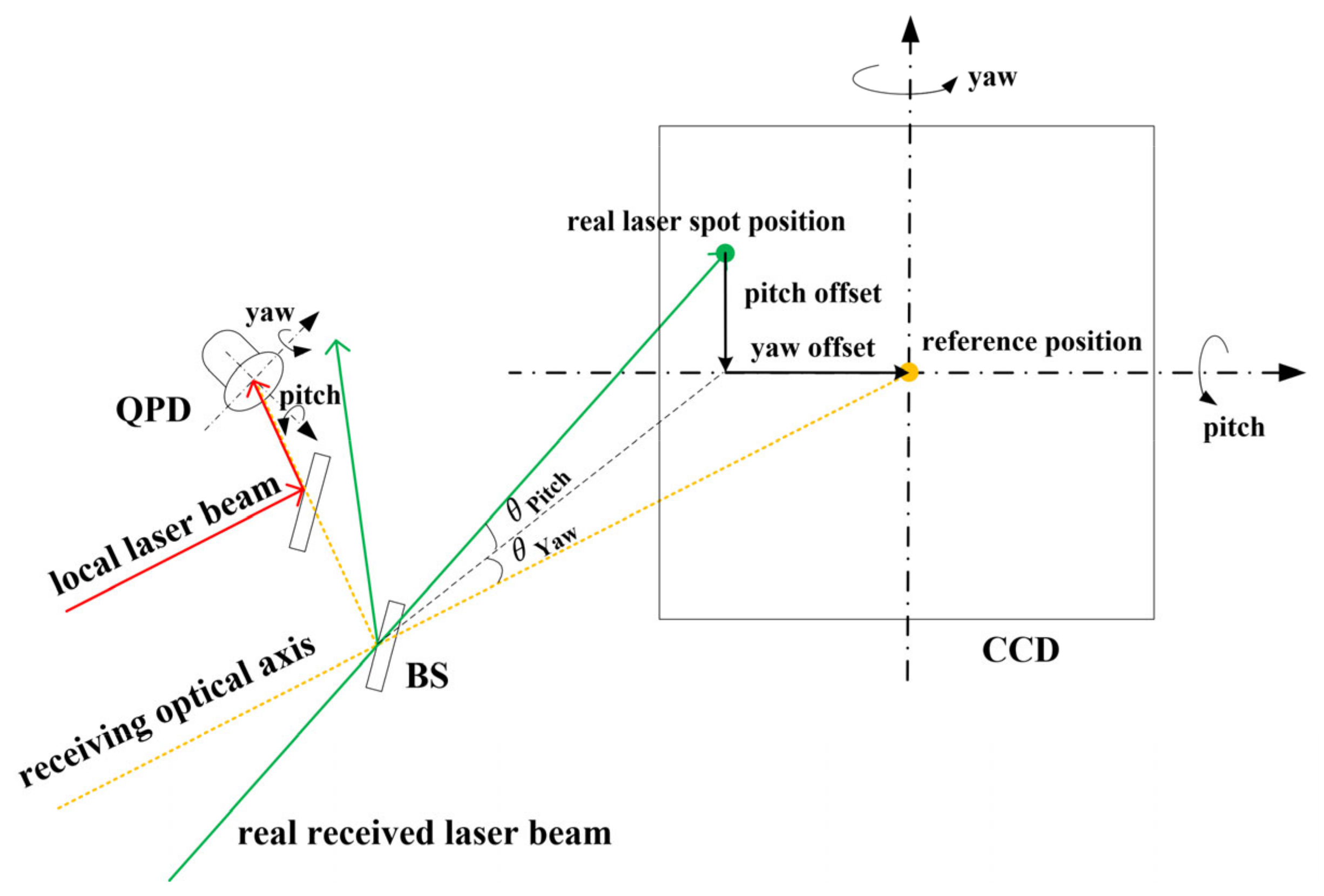
3.1. Semi-Physical Simulation Test for the Establishment of Inter-Satellite Laser Links
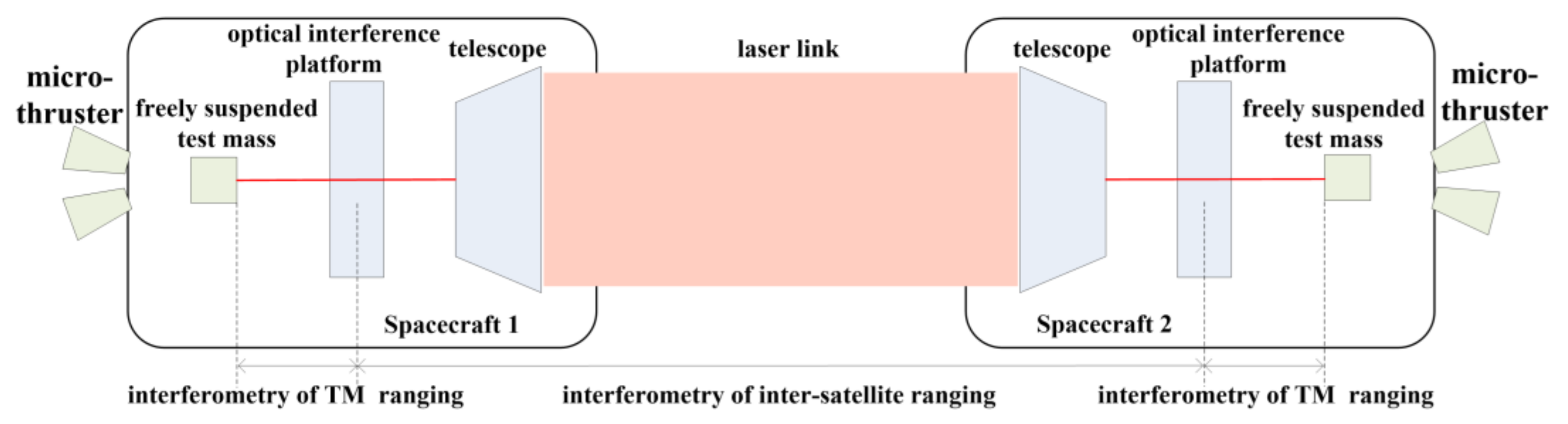
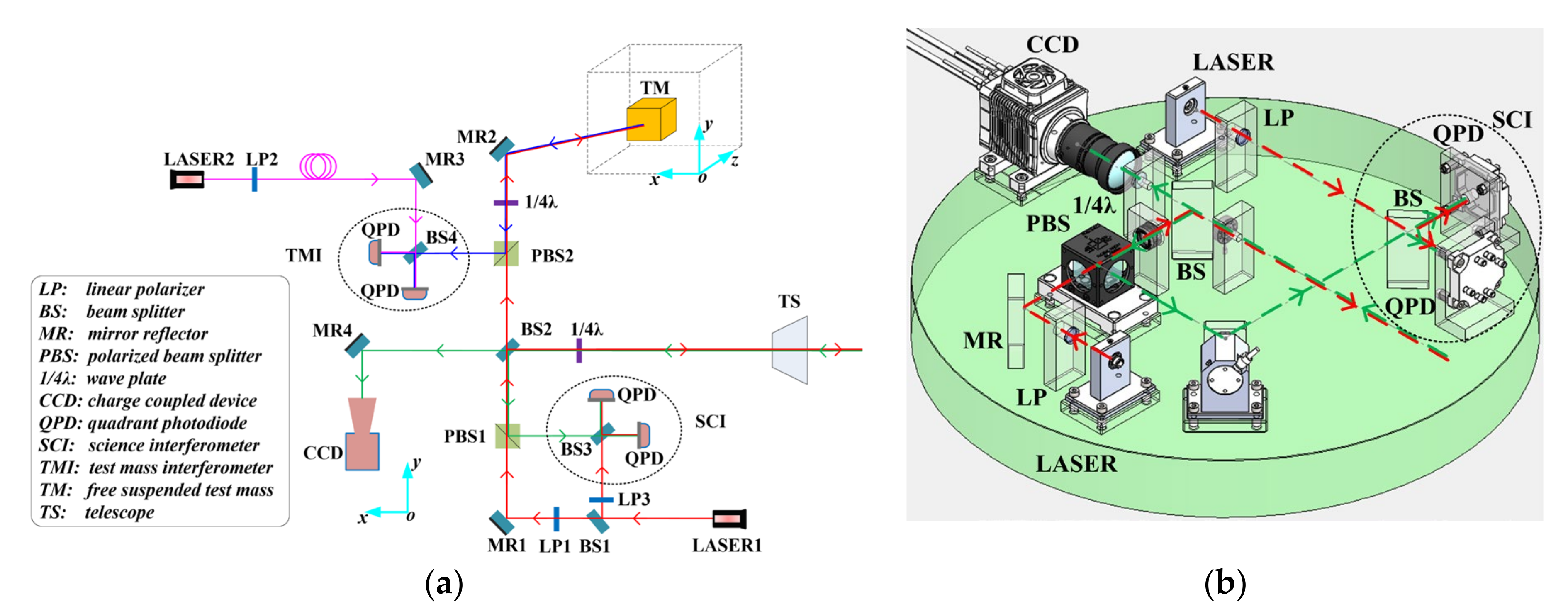
3.2. Semi-Physical Simulation Test for the Interferometry of Inter-Satellite Ranging
3.3. Semi-Physical Simulation of the Space Environment
4. Expected Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Einstein, A. Approximative Integration of the Field Equations of Gravitation. Sitzungsber. Preuss. Akad. Wiss. Berl. (Math. Phys.) 1916, 1916, 688–696. [Google Scholar]
- Harry, G.M.; LIGO Scientific Collaboration. Advanced LIGO: The next generation of gravitational wave detectors. Class. Quantum Grav. 2010, 27, 084006. [Google Scholar] [CrossRef]
- Abramovici, A.; Althouse, W.E.; Drever, R.W.P.; Gürsel, Y.; Kawamura, S.; Raab, F.J.; Shoemaker, D.; Sievers, L.; Spero, R.E.; Thorne, K.S.; et al. LIGO: The Laser Interferometer Gravitational-Wave Observatory. Science 1992, 256, 325–333. [Google Scholar] [CrossRef] [PubMed]
- Acernese, F.A.; Agathos, M.; Agatsuma, K.; Aisa, D.; Allemandou, N.; Allocca, A.; Amarni, J.; Astone, P.; Balestri, G.; Ballardin, G.; et al. Advanced Virgo: A second-generation interferometric gravitational wave de-tector. Class. Quantum Grav. 2014, 32, 024001. [Google Scholar] [CrossRef]
- Bradaschia, C.; Del Fabbro, R.; Di Virgilio, A.; Giazotto, A.; Kautzky, H.; Montelatici, V.; Passuello, D.; Brillet, A.; Cregut, O.; Hello, P.; et al. The VIRGO project: A wide band antenna for gravitational wave detec-tion. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrom. Detect. Assoc. Equip. 1990, 289, 518–525. [Google Scholar] [CrossRef]
- Aso, Y.; Michimura, Y.; Somiya, K.; Ando, M.; Miyakawa, O.; Sekiguchi, T.; Tatsumi, D.; Yamamoto, H. Interferometer design of the KAGRA gravitational wave detector. Phys. Rev. D 2013, 88, 043007. [Google Scholar] [CrossRef]
- Akutsu, T.; Ando, M.; Arai, K.; Arai, Y.; Araki, S.; Araya, A.; Aritomi, N.; Asada, H.; Aso, Y.; Atsuta, S.; et al. KAGRA: 2.5 generation interferometric gravitational wave detector. arXiv 2019, arXiv:1811.08079. [Google Scholar] [CrossRef]
- Punturo, M.; Abernathy, M.; Acernese, F.; Allen, B.; Andersson, N.; Arun, K.; Barone, F.; Barr, B.; Barsuglia, M.; Beker, M.; et al. The Einstein Telescope: A third-generation gravitational wave observatory. Class. Quantum Gravity 2010, 27, 194002. [Google Scholar] [CrossRef]
- Sathyaprakash, B.; Abernathy, M.; Acernese, F.; Ajith, P.; Allen, B.; Seoane, P.A.; Andersson, N.; Aoudia, S.; Arun, K.; Astone, P.; et al. Scientific objectives of Einstein Telescope. Class. Quantum Gravity 2012, 29, 124013. [Google Scholar] [CrossRef]
- Wang, Y.Y. The third generation laser interferometer gravitational wave detector. Mod. Phys. 2017, 29, 39–51. [Google Scholar]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Abernathy, M.R.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; et al. Observation of Gravitational Waves from a Binary Black Hole Merger. Phys. Rev. Lett. 2016, 116, 061102. [Google Scholar] [CrossRef] [PubMed]
- Prince, T.A. The Promise of Low-Frequency Gravitational Wave Astronomy; Astro2010: The Astronomy and Astrophysics Decadal Survey, Science White Papers. arXiv 2009, arXiv:0903.0103. [astro-ph.CO]. [Google Scholar]
- Jennrich, O.; Binétruy, P.; Colpi, M.; Danzmann, K.; Jetzer, P.; Lobo, A.; Nelemans, G.; Schutz, B.; Stebbins, R.; Sumner, T.; et al. NGO Assessment Study Report (Yellow Book). Cosmology and Extra-Galactic As-Trophysics. 2012. Available online: https://sci.esa.int/web/ngo/-/49839-ngo-assessment-study-report-yellow-book (accessed on 7 April 2021).
- Danzmann, K. LISA—An ESA cornerstone mission for the detection and observation of gravitational waves. Adv. Space Res. 2003, 32, 1233–1242. [Google Scholar] [CrossRef]
- Bender, P.; LISA Study Team. LISA. Laser Interferometer Space Antenna for the Detection and Observation of Gravitational Waves. Available online: https://pure.mpg.de/rest/items/item_52082/component/file_52083/content (accessed on 25 August 2021).
- Danzmann, K.; LISA study team. LISA: Laser interferometer space antenna for gravitational wave measurements. Class. Quantum Grav. 1996, 13, A247. [Google Scholar] [CrossRef]
- Luo, Z.; Guo, Z.; Jin, G.; Wu, Y.; Hu, W. A brief analysis to Taiji: Science and technology. Results Phys. 2020, 16, 102918. [Google Scholar] [CrossRef]
- Luo, Z.; Wang, Y.; Wu, Y.; Hu, W.; Jin, G. The Taiji program: A concise overview. Prog. Theor. Exp. Phys. 2021, 2021, 05A108. [Google Scholar] [CrossRef]
- Ziren, L.; Min, Z.; Gang, J.; Yueliang, W.; Wenrui, H. Introduction of Chinese Space-Borne Gravitational Wave Detection Program “Taiji” and “Taiji-1” Satellite Mission. J. Deep Space Explor. 2020, 7, 3–10. [Google Scholar] [CrossRef]
- Hu, W.-R.; Wu, Y.-L. The Taiji Program in Space for gravitational wave physics and the nature of gravity. Natl. Sci. Rev. 2017, 4, 685–686. [Google Scholar] [CrossRef]
- Jin, G. Program in space detection of gravitational wave in Chinese Academy of Sciences. J. Phys. Conf. Ser. 2017, 840, 12009. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.-S.; Duan, H.-Z.; Gong, Y.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A space-borne gravitational wave detector. Class. Quantum Gravity 2016, 33, 035010. [Google Scholar] [CrossRef]
- Milyukov, V.K. TianQin Space-Based Gravitational Wave Detector: Key Technologies and Current State of Implementation. Astron. Rep. 2020, 64, 1067–1077. [Google Scholar] [CrossRef]
- Luo, J.; Bai, Y.-Z.; Cai, L.; Cao, B.; Chen, W.-M.; Chen, Y.; Cheng, D.-C.; Ding, Y.-W.; Duan, H.-Z.; Gou, X.; et al. The first round result from the TianQin-1 satellite. Class. Quantum Gravity 2020, 37, 185013. [Google Scholar] [CrossRef]
- Mei, J.; Bai, Y.-Z.; Bao, J.; Barausse, E.; Cai, L.; Canuto, E.; Cao, B.; Chen, W.-M.; Chen, Y.; Ding, Y.-W.; et al. The TianQin project: Current progress on science and technology. Prog. Theor. Exp. Phys. 2021, 2021, 05A107. [Google Scholar] [CrossRef]
- Danzmann, K. LISA mission overview. Adv. Space Res. 2000, 25, 1129–1136. [Google Scholar] [CrossRef]
- Nayak, K.R.; Dhurandhar, S.V.; Pai, A.; Vinet, J.-Y. Optimizing the directional sensitivity of LISA. Phys. Rev. D 2003, 68, 122001. [Google Scholar] [CrossRef]
- Schuldt, T.; Gohlke, M.; Weise, D.; Johann, U.; Peters, A.; Braxmaier, C. Compact laser interferometer for translation and tilt measurement as optical readout for the LISA inertial sensor. In Optomechatronic Sensors and Instrumentation III; International Society for Optics and Photonics: Bellingham, WA, USA, 2007; p. 67160F. [Google Scholar]
- Schuldt, T.; Gohlke, M.; Weise, D.; Johann, U.; Peters, A.; Braxmaier, C. Picometer and nanoradian optical heterodyne interferometry for translation and tilt metrology of the LISA gravitational reference sensor. Class. Quantum Gravity 2009, 26, 085008. [Google Scholar] [CrossRef]
- Dehne, M.; Tröbs, M.; Heinzel, G.; Danzmann, K. Verification of polarising optics for the LISA optical bench. Opt. Express 2012, 20, 27273–27287. [Google Scholar] [CrossRef]
- Heinzel, G.; Braxmaier, C.; Caldwell, M.; Danzmann, K.; Draaisma, F.; Garcia, A.; Hough, J.; Jennrich, O.; Johann, U.; Killow, C.; et al. Successful testing of the LISA Technology Package (LTP) interferometer engineering model. Class. Quantum Gravity 2005, 22, S149–S154. [Google Scholar] [CrossRef]
- Chwalla, M.; Danzmann, K.; Barranco, G.F.; Fitzsimons, E.; Gerberding, O.; Heinzel, G.; Killow, C.J.; Lieser, M.; Perreur-Lloyd, M.; Robertson, D.I.; et al. Design and construction of an optical test bed for LISA imaging systems and tilt-to-length coupling. Class. Quantum Gravity 2016, 33, 245015. [Google Scholar] [CrossRef]
- Lieser, M.; d’Arcio, L.; Barke, S.; Bogenstahl, J.; Diekmann, C.; Diepholz, I.; Fitzsimons, E.D.; Gerberding, O.; Henning, J.-S.; Hewitson, M.; et al. LISA Optical Bench Testbed. Available online: https://apc.u-paris.fr/~beckmann/Proceedings/Lieser.pdf (accessed on 25 August 2021).
- Tröbs, M.; D’Arcio, L.; Barke, S.; Bogenstahl, J. Testing the NGO/LISA optical bench. In Proceedings of the International Conference on Space Optics—ICSO 2012. SPIE 2019 Ajaccio, Corsica, France, 9–12 October 2012; Volume 10564, p. 1056440. [Google Scholar]
- Dong, Y.H. Inter-Satellite Interferometry: Fine Pointing and Weak-Light Phase-Locking Techniques for Space Gravitational Wave Observatory. Ph.D. Thesis, Institute of Mechanics, Chinese Academy of Sciences, Beijing, China, 2015. [Google Scholar]
- Li, Y.; Liu, H.; Zhao, Y.; Sha, W.; Wang, Z.; Luo, Z.; Jin, G. Demonstration of an Ultraprecise Optical Bench for the Taiji Space Gravitational Wave Detection Pathfinder Mission. Appl. Sci. 2019, 9, 2087. [Google Scholar] [CrossRef]
- Cirillo, F. Controller Design for the Acquisition Phase of the LISA Mission Using a Kalman Filter. Ph.D. Thesis, University of Pisa, Pisa, Italy, 2007. [Google Scholar]
- Zhang, L.; Dai, J.; Li, C.; Wu, J.; Jia, J.; Wang, J. Design and in-orbit test of a high accuracy pointing method in satellite-to-ground quantum communication. Opt. Express 2020, 28, 8291–8307. [Google Scholar] [CrossRef] [PubMed]
- Gao, R.H.; Liu, H.S.; Luo, Z.R.; Jin, G. Introduction of laser pointing scheme in the Taiji program. Chin. Opt. 2019, 12, 425–431. [Google Scholar]
- Gao, R.H.; Liu, H.S.; Luo, Z.R.; Jin, G. Linearity performance analysis of the differential wavefront sensing for the Taiji pro-gramme. J. Mod. Optic. 2020, 67, 383–393. [Google Scholar] [CrossRef]
- Yu, X.; Gillmer, S.R.; Ellis, J. Beam geometry, alignment, and wavefront aberration effects on interferometric differential wavefront sensing. Meas. Sci. Technol. 2015, 26, 125203. [Google Scholar] [CrossRef]
- Gao, R.; Liu, H.; Zhao, Y.; Luo, Z.; Shen, J.; Jin, G. Laser acquisition experimental demonstration for space gravitational wave detection missions. Opt. Express 2021, 29, 6368–6383. [Google Scholar] [CrossRef] [PubMed]
- Han, S.B. Solid State Physic Effects and Modern Transducer Technology. Piezoelectrics Acoustooptics 1997, 19, 235–236. [Google Scholar]
- Gao, R.H. The Research on the Laser Acquisition-Pointing Technique of Inter-Satellite Interferometer for the Space-Based Gravi-tational Wave Detection. Ph.D. Thesis, Institute of Mechanics, Chinese Academy of Sciences, Beijing, China, 2020. [Google Scholar]
- Piezo Positioning Systems with Parallel Kinematics. Available online: https://www.pi-china.cn/zh_cn/technology/parallel-kinematics/parallel-kinematics/ (accessed on 13 April 2021).
- Robertson, N.A.; Abbott, B.; Abbott, R.; Adhikari, R.; Allen, G.S.; Armandula, H.; Aston, S.M.; Baglino, A.; Barton, M.; Bland, B.; et al. Seismic isolation and suspension systems for Advanced LIGO. In Proceedings of the Gravitational Wave and Particle Astrophysics Detectors, Glasgow, UK, 21–25 June 2004; SPIE: Bellingham, WA, USA, 2004; Volume 5500, pp. 81–92. [Google Scholar]
- Hua, W.; Adhikari, R.; DeBra, D.B.; Giaime, J.A.; Hammond, G.D.; Hardham, C.; Hennessy, M.; How, J.P.; Lantz, B.T.; MacInnis, M.; et al. Low-frequency active vibration isolation for advanced LIGO. In Proceedings of the Gravitational Wave and Particle Astrophysics Detectors, Glasgow, UK, 21–25 June 2004; SPIE: Bellingham, WA, USA, 2004; Volume 5500, pp. 194–206. [Google Scholar]
- Matichard, F.; Lantz, B.; Mason, K.; Mittleman, R.; Abbott, B.; Abbott, S.; Allwine, E.; Barnum, S.; Birch, J.; Biscans, S.; et al. Advanced LIGO two-stage twelve-axis vibration isolation and positioning platform. Part 1: Design and production overview. Precis. Eng. 2015, 40, 273–286. [Google Scholar] [CrossRef]
- Matichard, F.; Lantz, B.; Mason, K.; Mittleman, R.; Abbott, B.; Abbott, S.; Allwine, E.; Barnum, S.; Birch, J.; Biscans, S.; et al. Advanced LIGO two-stage twelve-axis vibration isolation and positioning platform. Part 2: Experimental investigation and tests results. Precis. Eng. 2015, 40, 287–297. [Google Scholar] [CrossRef]
- Huang, W.; Huang, T.; Gao, M.; Guo, Y. Experimental Research of Some Interference Factors in the Development Process of Absolute Gravimeter. Open J. Nat. Sci. 2017, 5, 358–364. [Google Scholar] [CrossRef]
- Abbott, B.P.; Abbott, R.; Adhikari, R.; Ajith, P.; Allen, B.; Allen, G.; Giardina, K.D.; Arain, M.A.; Araya, M.; Armandula, H.; et al. Laser Interferometer Gravitational Wave Detector. Prog. Astron. 2014, 32, 351–353. [Google Scholar]
- TS Series DataSheet.Pdf. Available online: https://www.herzan.com/products/active-vibration-control/ts-series-upgrades.html (accessed on 28 May 2021).
- Feng, Y. Laser interferometer gravitational-wave detectors—Hearing aids for human on deep universe. Physics 2016, 45, 293–299. [Google Scholar]
- Li, L.; Wang, X. Current Status and Prospects for Thermal Effects on Optical Systems and Athermalisation Techniques. Opt. Technol. 1997, 5, 27–28. [Google Scholar]
- Wang, F.; Jing, J.-R.; Li, C.-L.; Qi, X.-J. Development of vacuum thermal environment test system for deep space detector. Vacuum 2019, 56, 16–20. [Google Scholar]
- Li, Y.-Q.; Jin, G. A brief overview of 8 m prototype facility of laser interferometer for Taiji pathfinder mission. Appl. Phys. B 2021, 127, 88. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Procedures | Parameters | Technical Specifications |
|---|---|---|
| Based on CCD | Uncertainty area range | ±23.9 μrad |
| Acquisition residual error | 1 μrad | |
| Based on QPD | FOV (field of view) | 1.5 μrad |
| Pointing jitter | 100 nrad/√Hz |
| Parameters | Technical Specifications |
|---|---|
| Number of pixels | 640 × 512 |
| Pixel size | 15 μm |
| Focal length of imaging system | 150 mm |
| Photoelectric conversion efficiency (η) | 0.7 A/W @ 1064 nm |
| Parameters | Technical Specifications |
|---|---|
| Working wavelength | 1064 nm |
| Diameter of photosensitive surface | 1.2 mm |
| Interval between quadrant | 40 μm |
| 3 dB bandwidth | 20 MHz |
| NEP @20 MHz | 4.5 × 10−12 W/√Hz |
| Parameters | Technical Specifications |
|---|---|
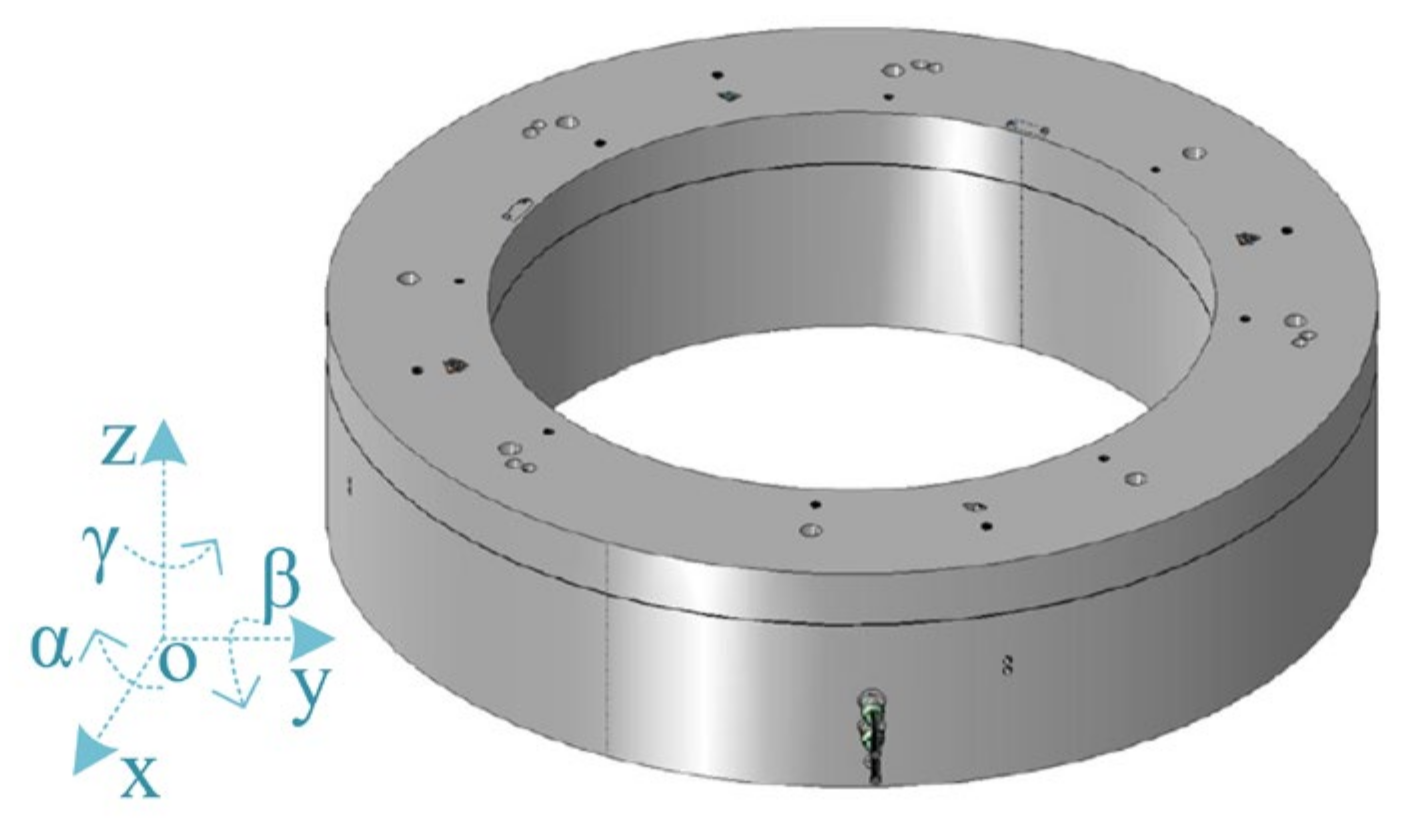
| Resolution in αβγ | 100 nrad |
| Travel range αβγ | bigger than ±23.9 μrad |
| Load | 50 kg |
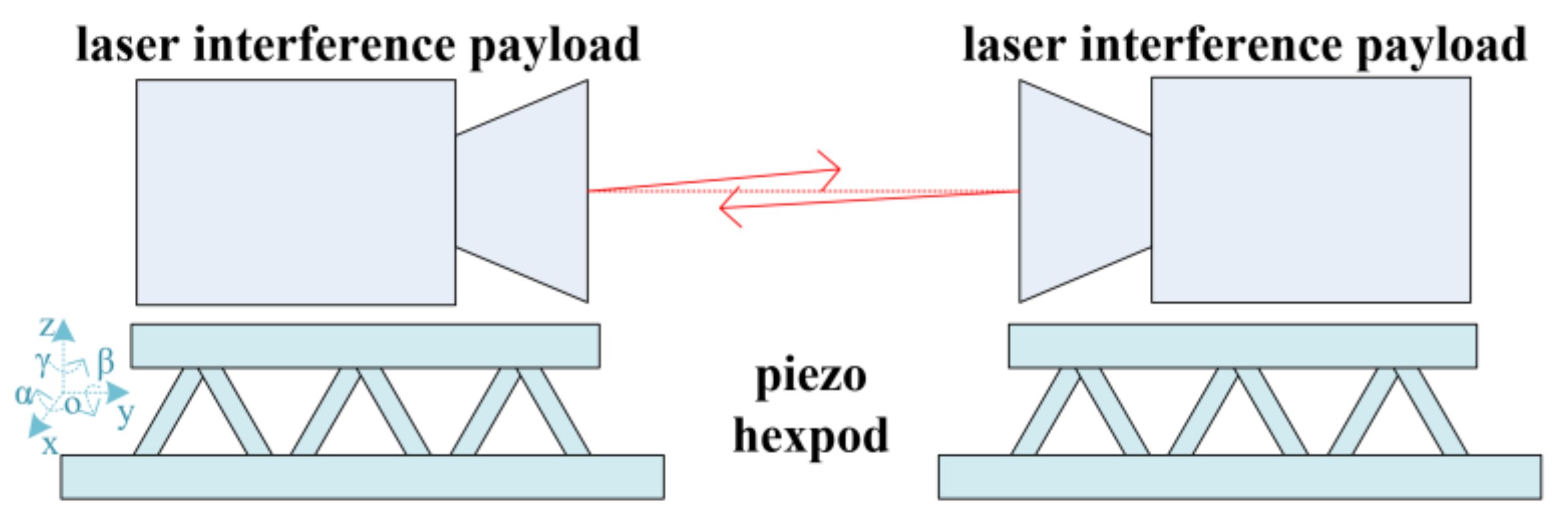
| Components | Parameters | Technical Specifications |
|---|---|---|
| Optical interference platform | Degree of spot coincidence for the interfering beams | <100 μm |
| Included angle of the interfering beams | <100 μrad | |
| Telescope | Effective aperture | 100 mm |
| Optical efficiency | 0.853 | |
| Magnification | 80× | |
| Wavefront quality | λ/20 rms | |
| Optical path stability | 50 pm/√Hz | |
| Stray light | 1 × 10−6 | |
| Laser | Wavelength | 1064 nm |
| Frequency stability | 30 Hz/√Hz | |
| Power | 20 mW |
| Parameters | Technical Specifications |
|---|---|
| Ultimate vacuum | 5 × 10−6 Pa |
| Leakage rate | <1 × 10−10 Pa·m3/s |
| Temperature | <80 K |
| Temperature uniformity | ±3 K |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Meng, L.; Xu, X.; Niu, Y.; Qi, K.; Bian, W.; Yang, Q.; Liu, H.; Jia, J.; Wang, J. Research on Semi-Physical Simulation Testing of Inter-Satellite Laser Interference in the China Taiji Space Gravitational Wave Detection Program. Appl. Sci. 2021, 11, 7872. https://doi.org/10.3390/app11177872
Wang Y, Meng L, Xu X, Niu Y, Qi K, Bian W, Yang Q, Liu H, Jia J, Wang J. Research on Semi-Physical Simulation Testing of Inter-Satellite Laser Interference in the China Taiji Space Gravitational Wave Detection Program. Applied Sciences. 2021; 11(17):7872. https://doi.org/10.3390/app11177872
Chicago/Turabian StyleWang, Yikun, Lingqiang Meng, Xuesen Xu, Yu Niu, Keqi Qi, Wei Bian, Qiujie Yang, Heshan Liu, Jianjun Jia, and Jianyu Wang. 2021. "Research on Semi-Physical Simulation Testing of Inter-Satellite Laser Interference in the China Taiji Space Gravitational Wave Detection Program" Applied Sciences 11, no. 17: 7872. https://doi.org/10.3390/app11177872
APA StyleWang, Y., Meng, L., Xu, X., Niu, Y., Qi, K., Bian, W., Yang, Q., Liu, H., Jia, J., & Wang, J. (2021). Research on Semi-Physical Simulation Testing of Inter-Satellite Laser Interference in the China Taiji Space Gravitational Wave Detection Program. Applied Sciences, 11(17), 7872. https://doi.org/10.3390/app11177872