
HSV Color-Space-Based Automated Object Localization for Robot Grasping without Prior Knowledge

 ,
,  ,
, 
Abstract
:1. Introduction
2. Related Work
2.1. Background Subtraction Algorithms
2.2. Feature Extraction and Region-Proposal-Based Algorithms
2.3. RGB and HSV Color Space Overview
- Hue—the color type (such as red, blue, or yellow) ranges from 0 to 360°;
- Saturation—the “vibrancy” of the color ranges from 0 to 100%;
- Value—the brightness of the color ranges from 0 to 100%.
3. HSV Color-Space-Based Automated Object Localization Scenario for Robot Grasping in Factory-as-a-Service (FaaS) Platform
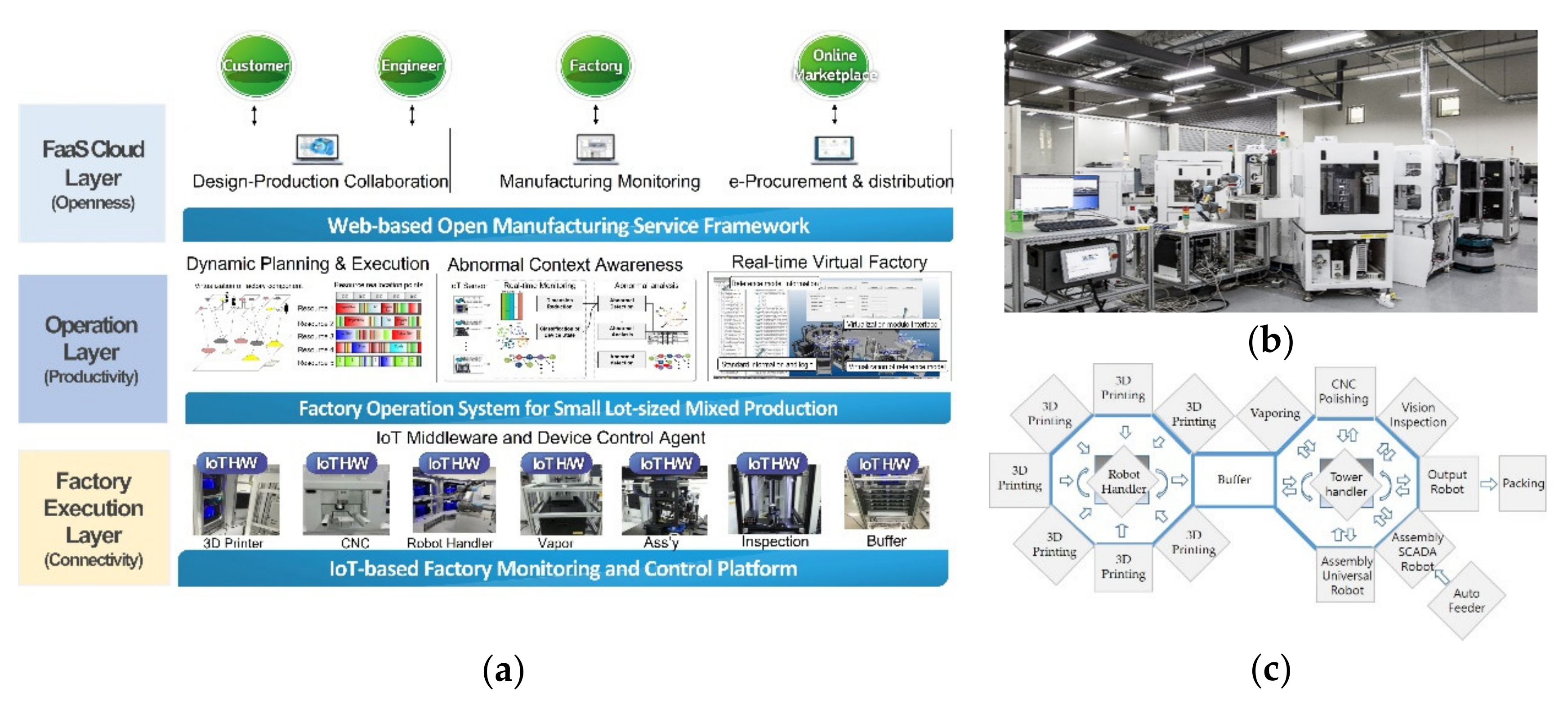
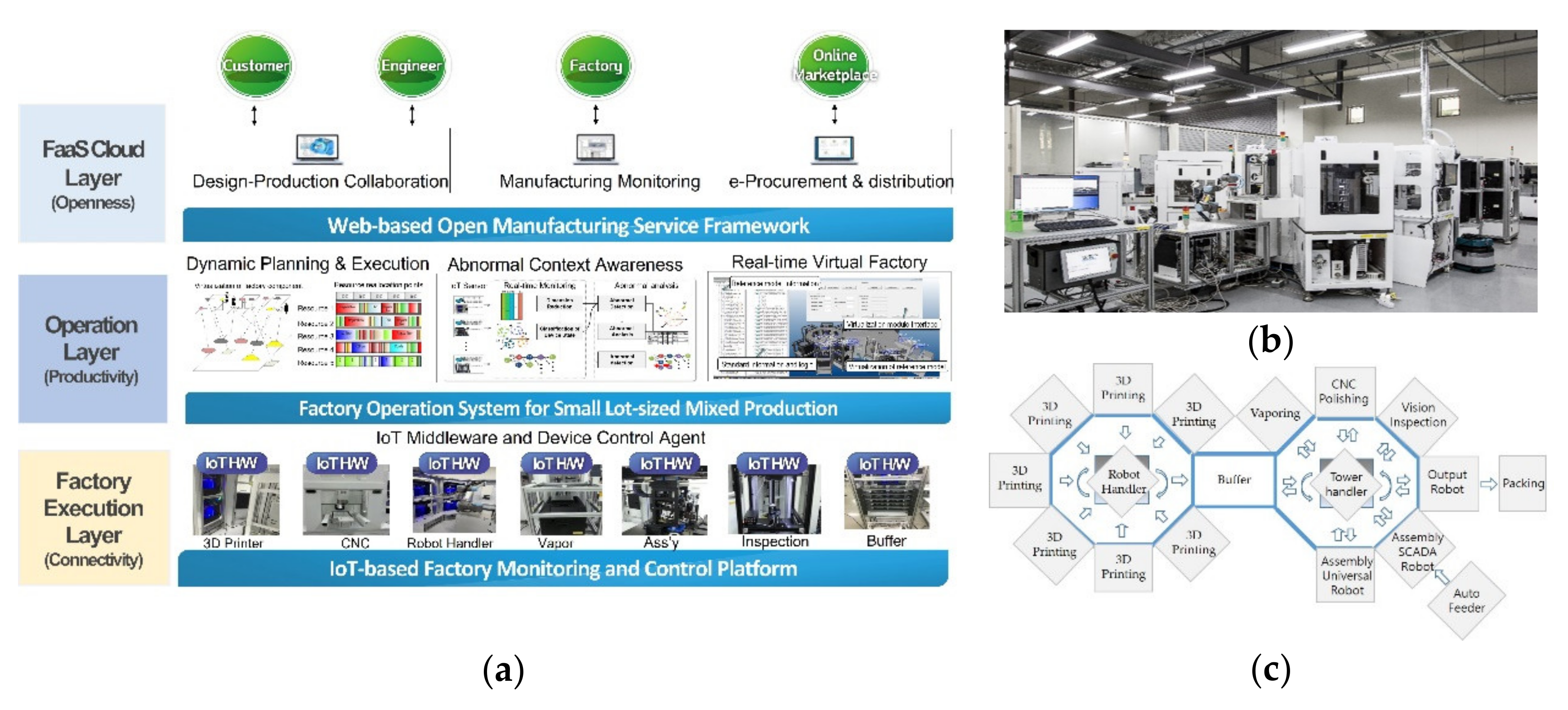
3.1. FaaS Platform Architecture and Line Configuration
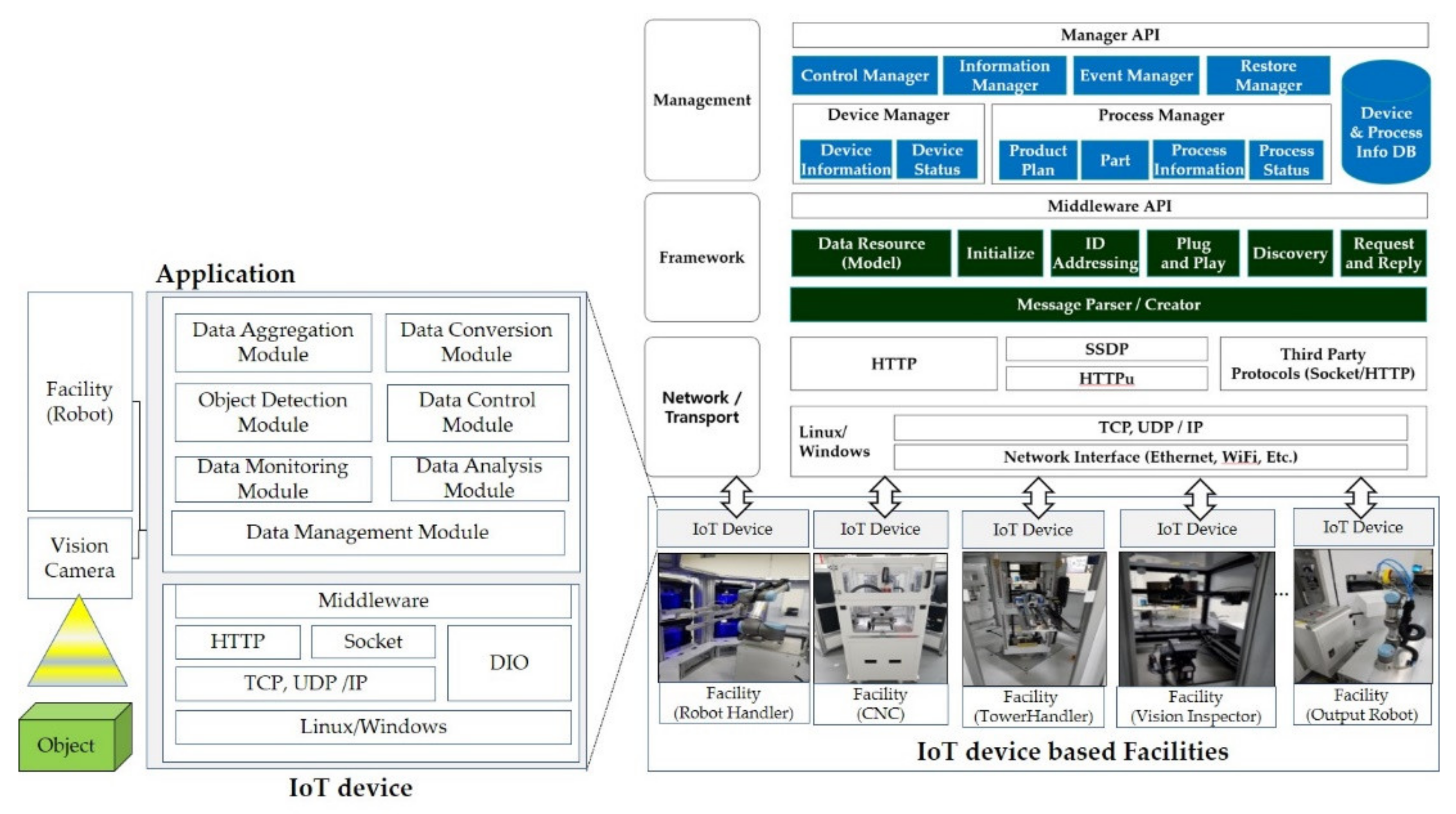
3.2. IoT-Based Device Management for Robot Grasping in FaaS Platform
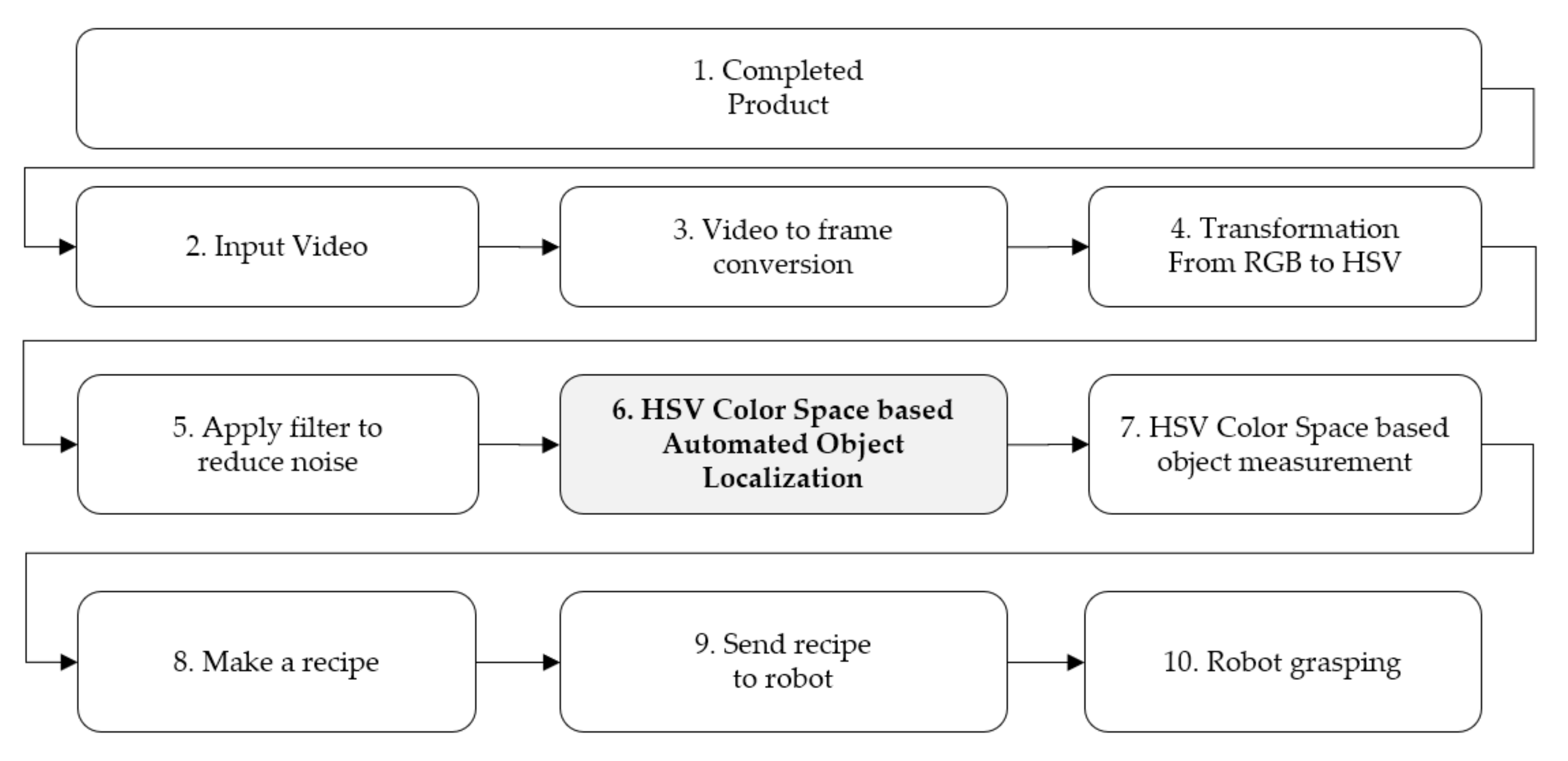
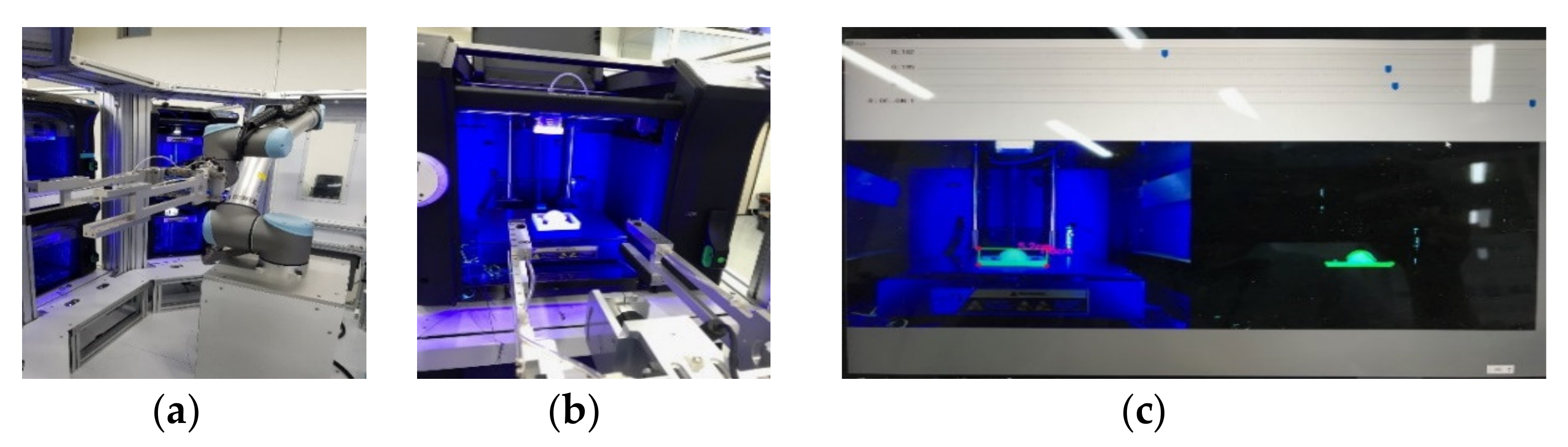
3.3. Robot Grasping Scenario in FaaS Platform
4. HSV Color-Space-Based Automated Object Feature Extraction
4.1. Motivation
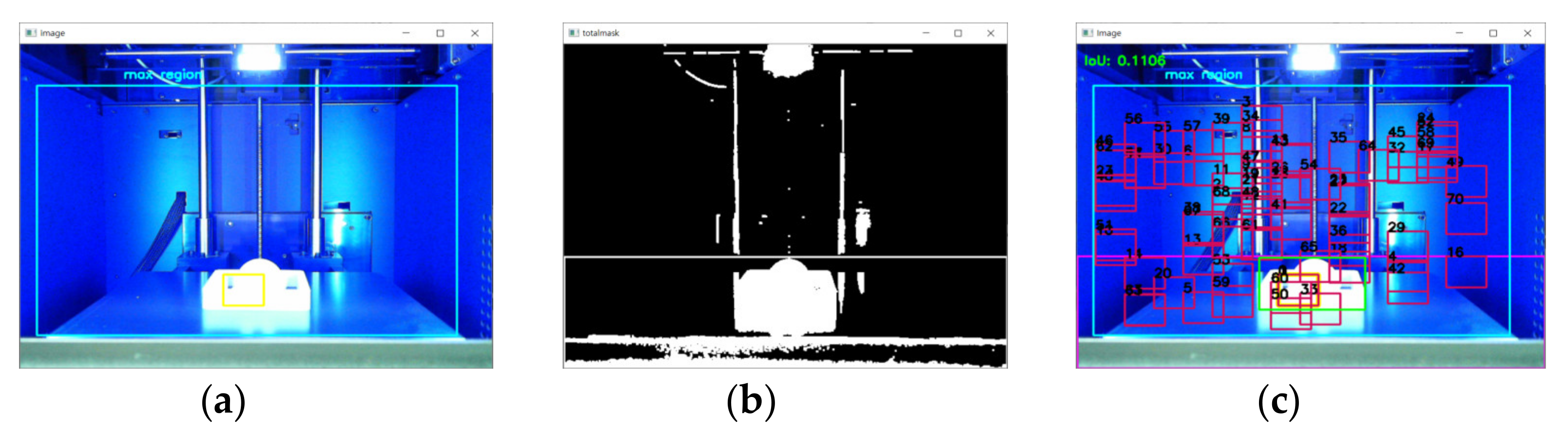
4.2. HSV Color-Space-Based Automated Object Localization Algorithm
- HSV color-space-based auto HSV color picking;
- Region of interest (ROI) random sampling;
- HSV similarity comparison;
- ROI merge operation.
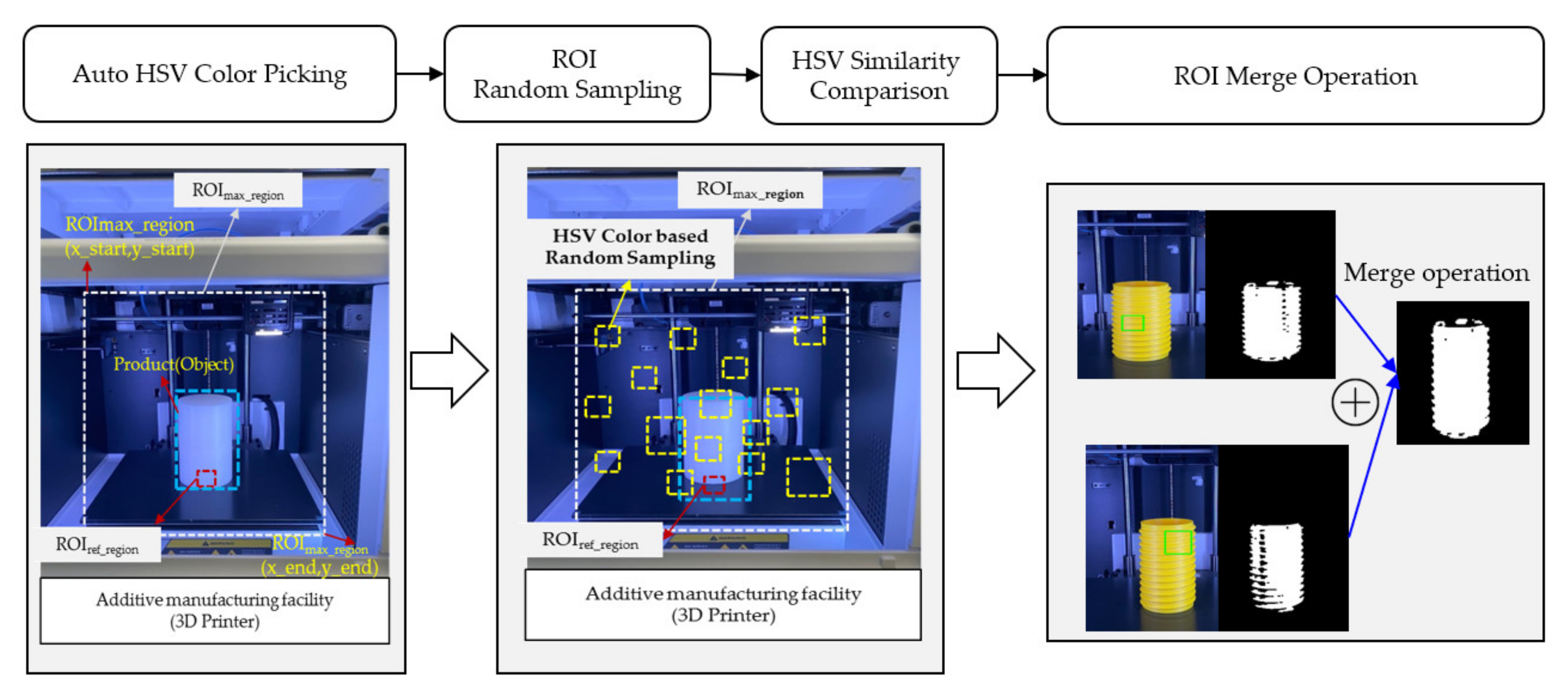
4.2.1. Configuration of Reference ROI and HSV Color-Space-Based Auto HSV Color Picking
| Algorithm 1. Auto HSV Color Picking |
| 1: Configuration of ROImax_region from Robot Handler 2: Set ROImax_region location info from bounding box (x_start, y_start, x_end, y_end) 3: Input Video from IoT-based Robot Handler 4: Video to image frame conversion and transformation from RGB to HSV through Equations (1)–(3) 5: Set ROIref_region location info from bounding box (x_start, y_start, x_end, y_end) 6: Picking automated HSV Color Extraction (HSV values) from ROIref_region 7: Registration color threshold of ROIref_region 8: Set H, S, V upper and lower bound threshold, ROIref_region location |
4.2.2. HSV Color-Based ROI Random Sampling and HSV Color Similarity Comparison
| Algorithm 2. ROI Random Sampling and Similarity Comparison |
| 1: Start ROI Random Sampling and Similarity Comparison in ROImax_region 2: Set ROIsampling_max = Max_sample_count 3: For ROIsampling_i = 0: ROIsampling_max 4: Extract Random ROIsampling_i location info from bounding box (x_start, y_start, x_end, y_end) 5: ROIsampling_i → Transformation from RGB to HSV through Equations (4)–(6) 6: Picking automated HSV Color Extraction (HSV values) from ROIsampling_i 7: Compute HSV Color Similarity of ROIref_region between ROIsampling_i 8: Retrieve HSV Color Values → (H1, S1, V1 of ROIref_region and H0, S0, V0 ROIsampling_i) 9: Compute HSV Color Distance by Equation (7) 10: IF(Similaritythreshold > Distance) then 11: Set HSV Upper(max) and Low(min) bound threshold from ROIsampling_i 12: Add HSV value, Upper/Lower bound threshold of ROIsampling_i in ROITempList 13: Else 14: ROIsampling_i = ROIsampling_i + 1 15: IF(ROIsampling_i > Max_sample_count) then 16: Action ROITempList Merge Operation 17: Else 18: Continue: 19: End |
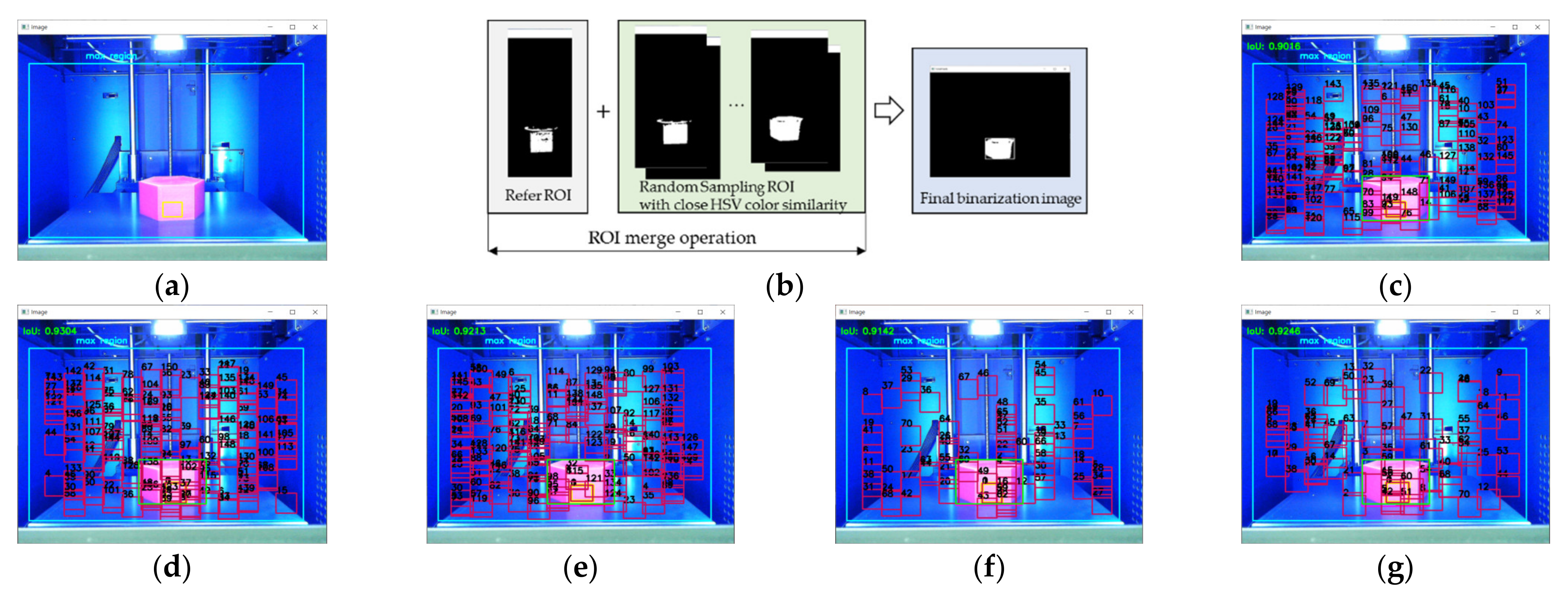
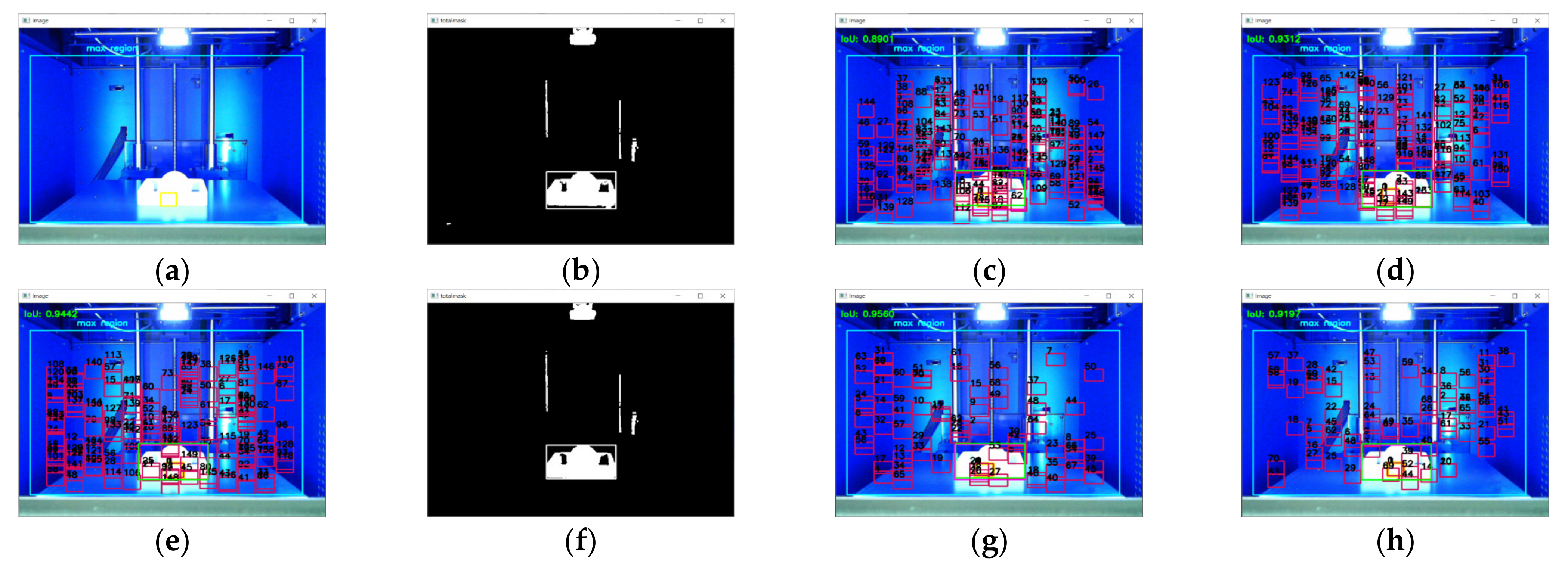
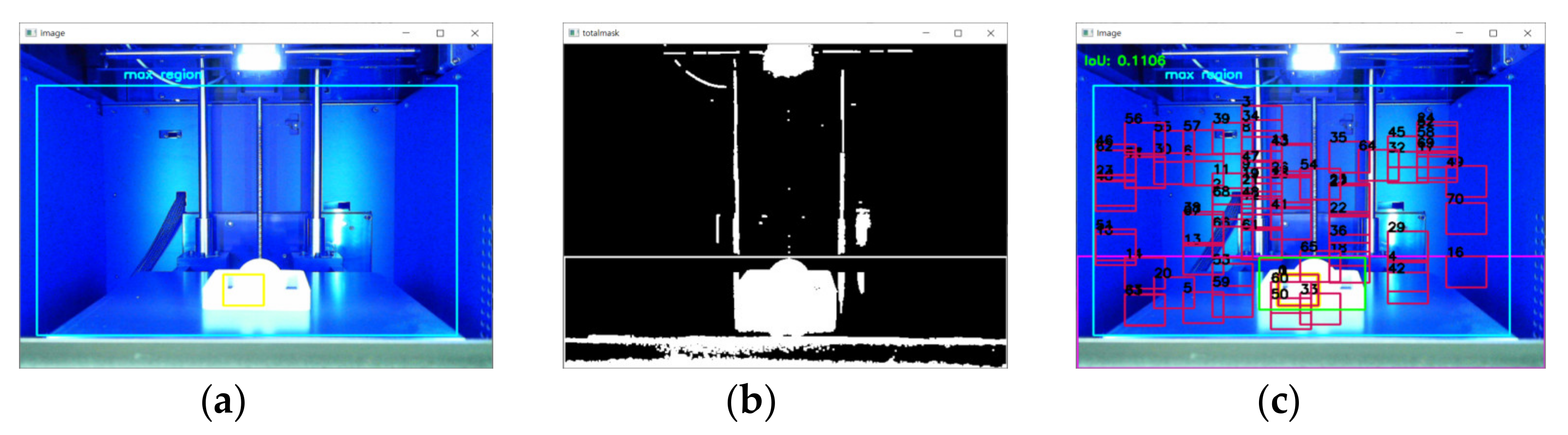
4.2.3. HSV Color-Based ROI Merge Operation
| Algorithm 3. ROI Merge Operation |
| 1: Start ROI Merge Operation 2: Set ROITempList_i, Retrieve ROITempList_max 3: Set ROITempList_i = 0 4: For i = 0: ROITempList_max 5: Retrieve HSV Value, Upper and Lower threshold for ROITempList_i 6: ROITempList_i → Image Masking According to Upper and Lower threshold 7: Bit Operation ROIref_region and ROITempList_i 8: Merge operation of ROIref and ROITempList_i 9: IF(ROITempList_i > ROITempList_max) then 10: Go to Automated Object Measurement through Equations (8) and (9) 11: Else 12: ROITempList_i = ROITempList_i +1 13: Continue: 14: End |
4.3. HSV Color-Space-Based Object Measurement Algorithm
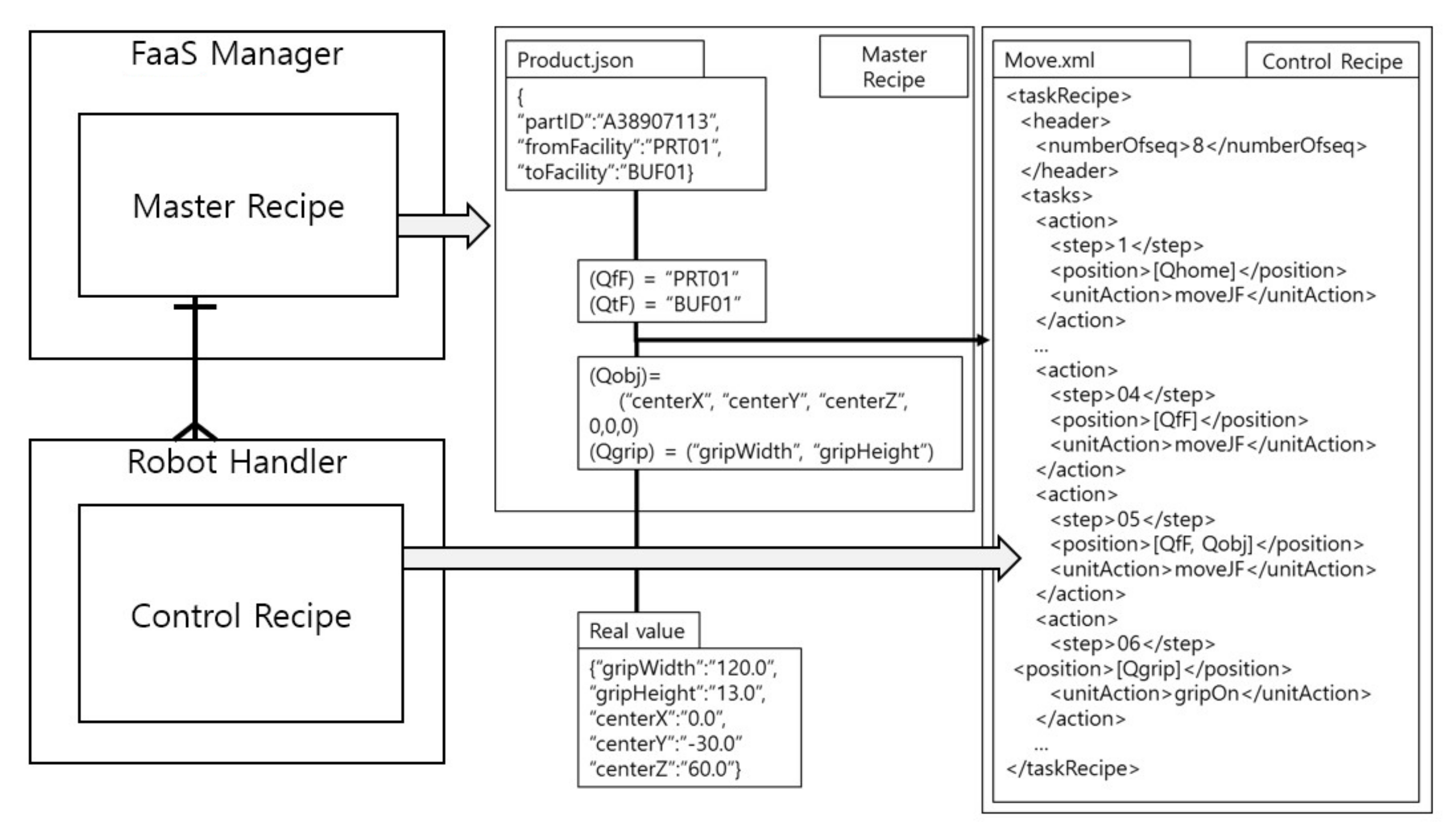
4.4. Automated Recipe Generation of Robot Grasping
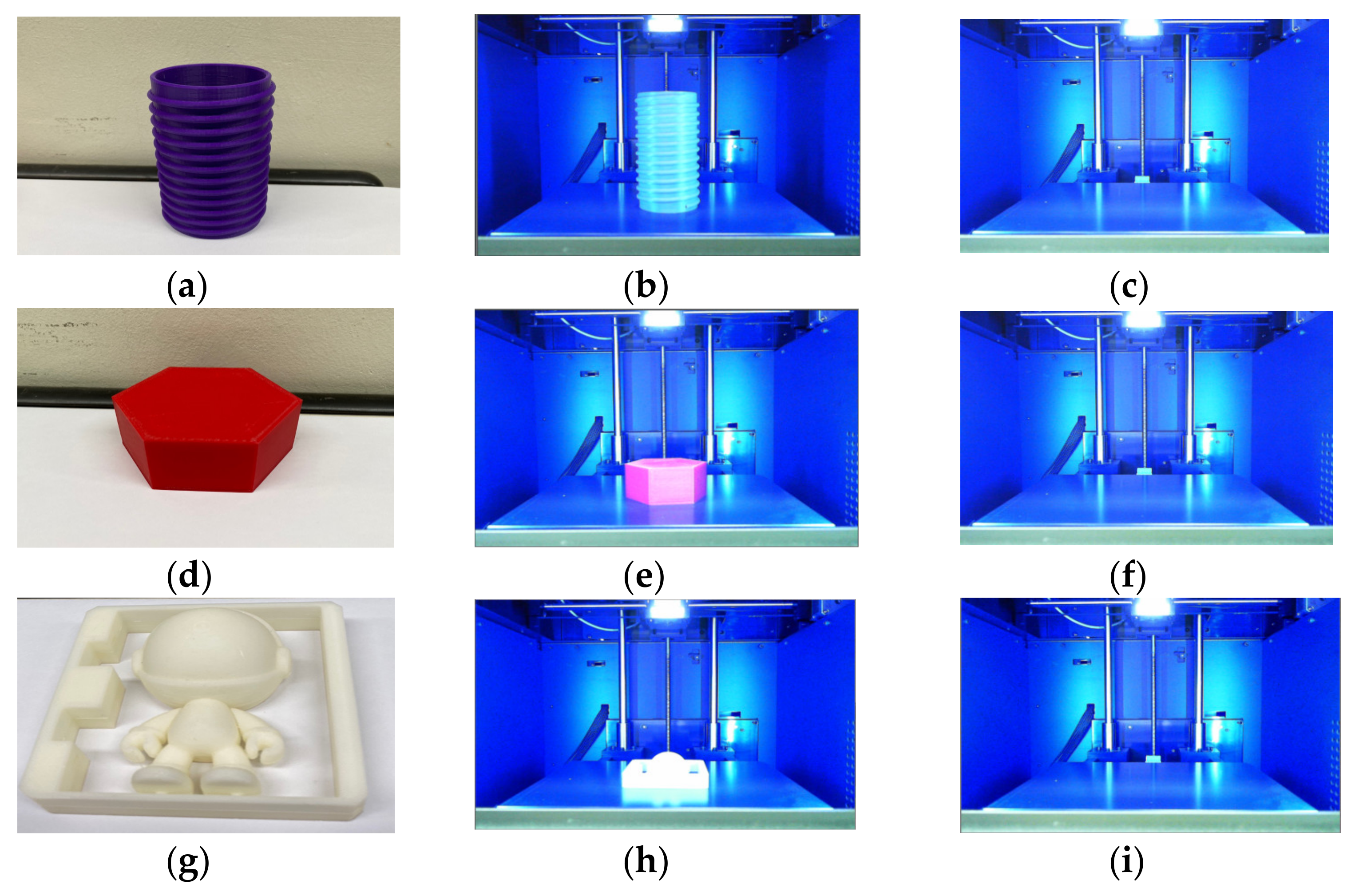
5. Experiment and Result Analysis
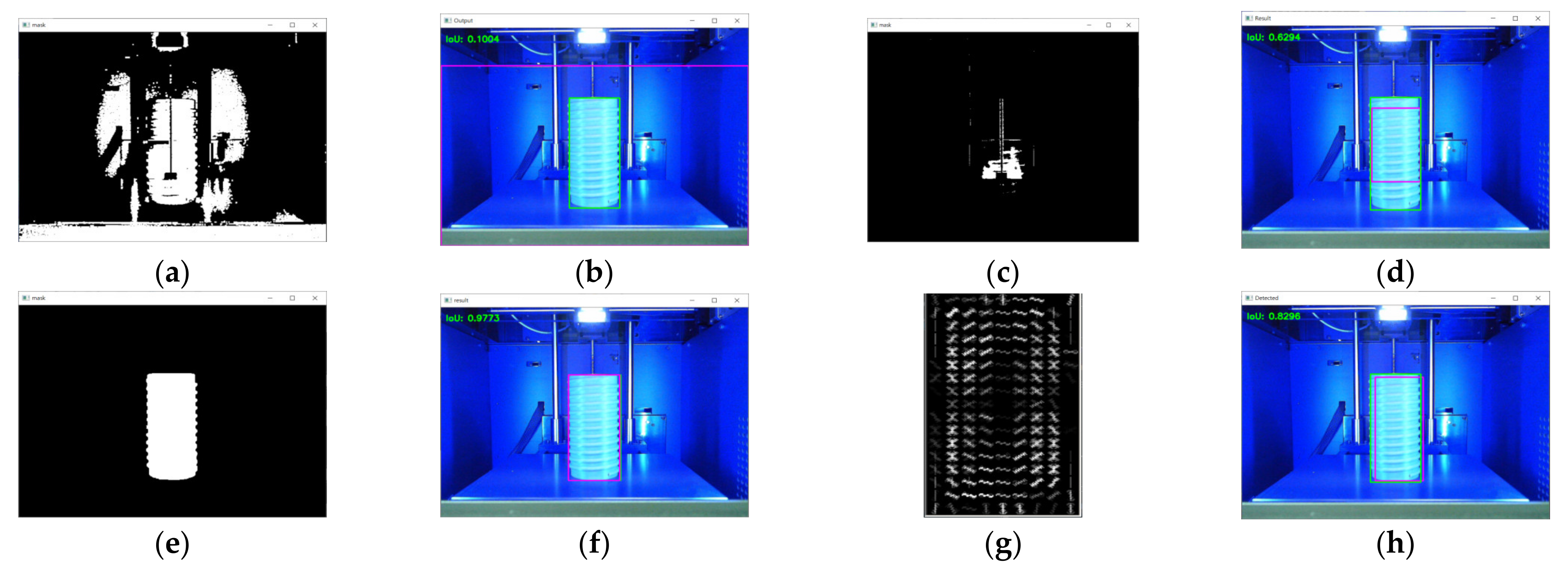
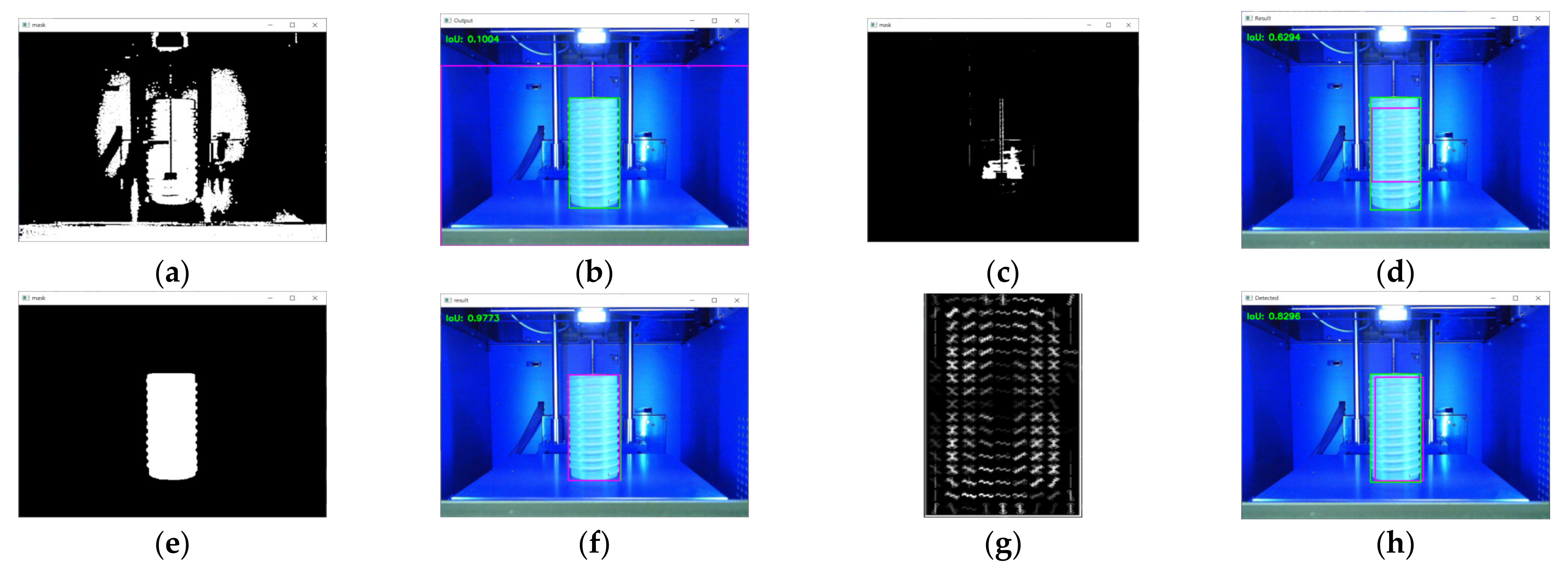
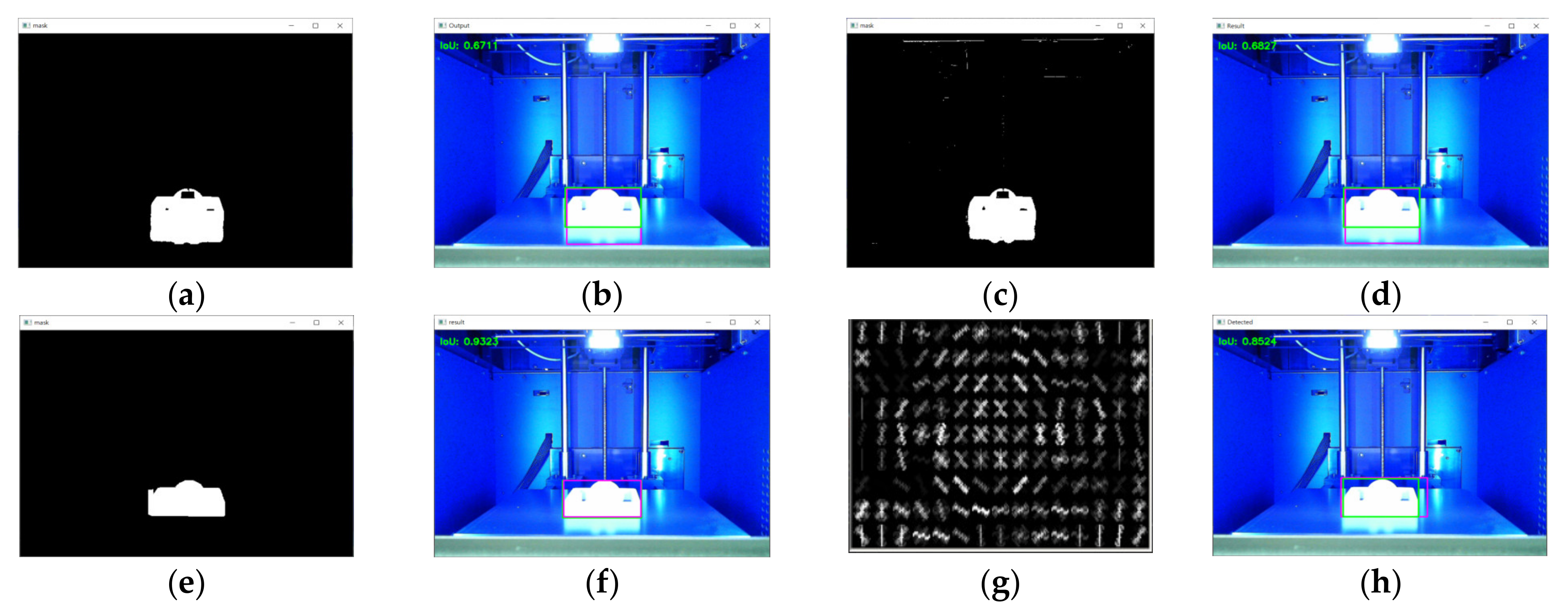
Comparison of Algorithms
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lasi, H.; Fettke, P.; Kemper, H.G.; Feld, T.; Hoffmann, M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242. [Google Scholar] [CrossRef]
- Chen, B.; Wan, B.; Shu, L.; Li, P.; Mukherjee, M.; Yin, B. “Smart Factory of Industry 4.0: Key Technologies, Application Case, and Challenges.”. IEEE Access 2018, 6, 6505–6519. [Google Scholar] [CrossRef]
- Park, K.T.; Son, Y.H.; Ko, S.W.; Noh, S.D. Digital Twin and Reinforcement Learning-Based Resilient Production Control for Micro Smart Factory. Appl. Sci. 2021, 11, 2977. [Google Scholar] [CrossRef]
- Son, J.; Kang, H.C.; Bae, H.C.; Lee, E.S.; Han, H.Y.; Kim, H. IoT-based open manufacturing service platform for mass personalization. J. Korean Inst. Commun. Sci. 2015, 33, 42–47. [Google Scholar]
- Wang, W.; Chen, Y.; Li, R.; Jia, Y. Learning and Comfort in Human–Robot Interaction: A Review. Appl. Sci. 2019, 9, 5152. [Google Scholar] [CrossRef] [Green Version]
- Okarma, K. Applications of Computer Vision in Automation and Robotics. Appl. Sci. 2020, 10, 6783. [Google Scholar] [CrossRef]
- Kang, H.C.; Han, H.Y.; Bae, H.C.; Lee, E.S.; Kim, M.G.; Son, J.; Kim, H.; Kim, Y.K. HSV Color Space Based Robot Grasping for Personalized Manufacturing Services. In Proceedings of the International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 16–18 October 2019; IEEE: Jeju, Korea, 2019; pp. 1010–1012. [Google Scholar]
- Poppe, C.; Martens, G.; de Bruyne, S.; Lambert, P.; van de Walle, R. Robust spatio-temporal multimodal background subtraction for video surveillance. Opt. Eng. 2008, 47, 107203. [Google Scholar] [CrossRef]
- Chiu, S.-Y.; Chiu, C.-C.; Xu, S.S.-D. A Background Subtraction Algorithm in Complex Environments Based on Category Entropy Analysis. Appl. Sci. 2018, 8, 885. [Google Scholar] [CrossRef] [Green Version]
- Piccardi, M. Background subtraction techniques: A review. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No. 04CH37583), Hague, The Netherlands, 10–13 October 2004; pp. 3099–3104. [Google Scholar]
- Tamersoy, B. Background Subtraction; The University of Texas at Austin: Austin, TX, USA, 2009. [Google Scholar]
- Roy, P.; Dutta, S.; Dey, N.; Dey, G.; Chakraborty, S.; Ray, R. Adaptive thresholding: A comparative study. In Proceedings of the International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kanyakumari, India, 10–11 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1182–1186. [Google Scholar]
- Bradley, D.; Roth, G. Adaptive thresholding using the integral image. J. Graph. Tools 2007, 12, 13–21. [Google Scholar] [CrossRef]
- Bouttefroy, P.L.M.; Bouzerdoum, A.; Phung, S.L.; Beghdadi, A. On the analysis of background subtraction techniques using Gaussian mixture models. In Proceedings of the 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 14–19 March 2010; pp. 4042–4045. [Google Scholar]
- Stauffer, C.; Grimson, W.E.L. Adaptive background mixture models for real-time tracking. In Proceedings of the 1999 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Fort Collins, CO, USA, 23–25 June 1999; pp. 246–252. [Google Scholar]
- Kim, W.; Jung, C. Illumination-invariant background subtraction: Comparative review, models, and prospects. IEEE Access 2017, 5, 8369–8384. [Google Scholar] [CrossRef]
- Jacques, J.C.S.; Jung, C.R.; Musse, S.R. A background subtraction model adapted to illumination changes. In Proceedings of the 2006 International Conference on Image Processing, Atlanta, GA, USA, 8–11 October 2006; pp. 1817–1820. [Google Scholar]
- Parks, D.H.; Fels, S.S. Evaluation of Background Subtraction Algorithm with Post-Processing. In Proceedings of the 2008 5th International Conference on Advanced Video & Signal Based Surveillance, Santa Fe, NM, USA, 1–3 September 2008; pp. 192–199. [Google Scholar]
- Salvador, E.; Cavallaro, A.; Ebrahimi, T. Cast shadow segmentation using invariant color features. Comput. Vis. Image Underst. 2004, 95, 238–259. [Google Scholar] [CrossRef] [Green Version]
- Horn, B.K.; Schunck, B.G. Determining optical flow. Artif. Intell. 1981, 17, 185–203. [Google Scholar] [CrossRef] [Green Version]
- Ren, X.; Ramanan, D. Histograms of sparse codes for object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 3246–3253. [Google Scholar]
- Yoon, H.S.; Bae, Y.L.; Yang, Y.K. A Study on Image Retrieval Using Space Information of Color Histogram. In Proceedings of the Korea Information Processing Society Conference, Daejeon, Korea, 13–14 October 2000; pp. 867–870. [Google Scholar]
- Tuytelaars, T.; Mikolajczyk, K. Local Invariant Feature Detectors: A Survey; Now Publishers Inc.: Boston, MA, USA, 15 June 2008; pp. 177–280. [Google Scholar]
- Harris, C.G.; Stephens, M. A combined corner and edge detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Suleiman, A.; Sze, V. Energy-efficient HOG-based object detection at 1080HD 60 fps with multi-scale support. In Proceedings of the 2014 IEEE Workshop on Signal Processing Systems (SiPS), Belfast, UK, 20–22 October 2014; pp. 1–6. [Google Scholar]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision(ICCV), Kerkyra, Greece, 20–27 September 1999; pp. 1150–1157. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Rother, C.; Kolmogorov, V.; Blake, A. GrabCut–Interactive Foreground Extraction using Iterated Graph Cut. ACM Trans. Graph. 2004, 23, 309–314. [Google Scholar] [CrossRef]
- Boykov, Y.; Kolmogorov, V. An experimental comparison of min-cut/max-flow algorithms for energy minimization in vision. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 1124–1137. [Google Scholar] [CrossRef] [Green Version]
- Yi, F.; Moon, I. Image segmentation: A survey of graph-cut methods. In Proceedings of the IEEE International Conference on Systems and Informatics (ICSAI2012), Yantai, China, 19–20 May 2012; pp. 1936–1941. [Google Scholar]
- Albawi, S.; Mohammed, T.A.; Al-Zawi, S. Understanding of a convolutional neural network. In Proceedings of the IEEE International Conference on Engineering and Technology (ICET), Antalya, Turkey, 21–23 August 2017; pp. 1–6. [Google Scholar]
- Kim, Y.H.; Park, S.W.; Kim, D.Y. Research on Robust Face Recognition against Lighting Variation using CNN. J. Korea Inst. Electron. Commun. Sci. 2017, 12, 325–330. [Google Scholar]
- Varghese, A.; Gubbi, J.; Ramaswamy, A.; Balamuralidhar, P. ChangeNet: A deep learning architecture for visual change detection. In Proceedings of the European Conference on Computer Vision (ECCV) Workshops, Munich, Germany, 8–14 September 2018. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Zhao, Z.Q.; Zheng, P.; Xu, S.T.; Wu, X. Object detection with deep learning: A review. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3212–3232. [Google Scholar] [CrossRef] [Green Version]
- Koščević, K.; Subašić, M.; Lončarić, S. Deep Learning-Based Illumination Estimation Using Light Source Classification. IEEE Access 2020, 8, 84239–84247. [Google Scholar] [CrossRef]
- Clement, L.; Kelly, J. How to train a cat: Learning canonical appearance transformations for direct visual localization under illumination change. IEEE Robot. Autom. Lett. 2018, 3, 2447–2454. [Google Scholar] [CrossRef] [Green Version]
- Shaik, K.B.; Ganesan, P.; Kalist, V.; Sathish, B.S.; Jenitha, J.M.M. Comparative study of skin color detection and segmentation in HSV and YCbCr color space. Procedia Comput. Sci. 2015, 57, 41–48. [Google Scholar] [CrossRef] [Green Version]
- Ganesan, P.; Rajini, V.; Sathish, B.S.; Shaik, K.B. HSV color space based segmentation of region of interest in satellite images. In Proceedings of the International Conference on Control, Instrumentation, Communication and Computational Technologies (ICCICCT), Kanyakumari, India, 10–11 July 2014; pp. 101–105. [Google Scholar]
- Herodotou, N.; Plataniotis, K.N.; Venetsanopoulos, A.N. A color segmentation scheme for object-based video coding. In Proceedings of the IEEE Symposium on Advances in Digital Filtering and Signal Processing, Symposium Proceedings, Victoria, BC, Canada, 5–6 June 1998; pp. 25–29. [Google Scholar]
- Sural, S.; Qian, G.; Pramanik, S. Segmentation and histogram generation using the HSV color space for image retrieval. In Proceedings of the IEEE International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002. [Google Scholar]
- Li, D. (Ed.) Encyclopedia of Microfluidics and Nanofluidics; Springer Science & Business Media: Berlin, Germany, 2008. [Google Scholar]
- Instrument Society of America (ISA), ANSI/ISA-88.01-1995. “Batch Control Part1: Models and Terminology”; Instrument Society of America (ISA): Durham, NC, USA, 1995; pp. 35–51. [Google Scholar]
- Bradski, G.; Kaehler, A. OpenCV. Dr. Dobb’s J. Softw. Tools 2000, 3. [Google Scholar]
- Zhou, D.; Fang, J.; Song, X.; Guan, C.; Yin, J.; Dai, Y.; Yang, R. IoU Loss for 2D/3D Object Detection. In Proceedings of the IEEE International Conference on 3D Vision (3DV), IEEE, Quebec, QC, Canada, 16–19 September 2019; pp. 85–94. [Google Scholar]
- Scalera, L.; Seriani, S.; Gasparetto, A.; Gallina, P. Non-Photorealistic Rendering Techniques for Artistic Robotic Painting. Robotics 2019, 8, 10. [Google Scholar] [CrossRef] [Green Version]
- Karimov, A.; Kopets, E.; Kolev, G.; Leonov, S.; Scalera, L.; Butusov, D. Image Preprocessing for Artistic Robotic Painting. Inventions. Appl. Sci. 2021, 6, 19. [Google Scholar]
- Zhang, J.; Li, M.; Feng, Y.; Yang, C. Robotic grasp detection based on image processing and random forest. Multimed. Tools Appl. 2020, 79, 2427–2446. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | BS 1 Using Otsu | BS 1 Using GMM | GrabCut | HOG | Proposed Algorithm |
|---|---|---|---|---|---|
| IoU | IoU | IoU | IoU | IoU | |
| Test Product 1 | 0.1004 | 0.6294 | 0.9733 | 0.8296 | 0.9039 (0.9458) |
| Test Product 2 | 0.9195 | 0.9195 | 0.9420 | 0.7672 | 0.9178 (0.9194) |
| Test Product 3 | 0.6711 | 0.6827 | 0.9323 | 0.8524 | 0.9218 (0.9378) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, H.-C.; Han, H.-N.; Bae, H.-C.; Kim, M.-G.; Son, J.-Y.; Kim, Y.-K. HSV Color-Space-Based Automated Object Localization for Robot Grasping without Prior Knowledge. Appl. Sci. 2021, 11, 7593. https://doi.org/10.3390/app11167593
Kang H-C, Han H-N, Bae H-C, Kim M-G, Son J-Y, Kim Y-K. HSV Color-Space-Based Automated Object Localization for Robot Grasping without Prior Knowledge. Applied Sciences. 2021; 11(16):7593. https://doi.org/10.3390/app11167593
Chicago/Turabian StyleKang, Hyun-Chul, Hyo-Nyoung Han, Hee-Chul Bae, Min-Gi Kim, Ji-Yeon Son, and Young-Kuk Kim. 2021. "HSV Color-Space-Based Automated Object Localization for Robot Grasping without Prior Knowledge" Applied Sciences 11, no. 16: 7593. https://doi.org/10.3390/app11167593
APA StyleKang, H.-C., Han, H.-N., Bae, H.-C., Kim, M.-G., Son, J.-Y., & Kim, Y.-K. (2021). HSV Color-Space-Based Automated Object Localization for Robot Grasping without Prior Knowledge. Applied Sciences, 11(16), 7593. https://doi.org/10.3390/app11167593