
A Semi-Empirical Fluid Dynamic Model of a Vacuum Microgripper Based on CFD Analysis



Abstract
:1. Introduction
2. Material and Methods
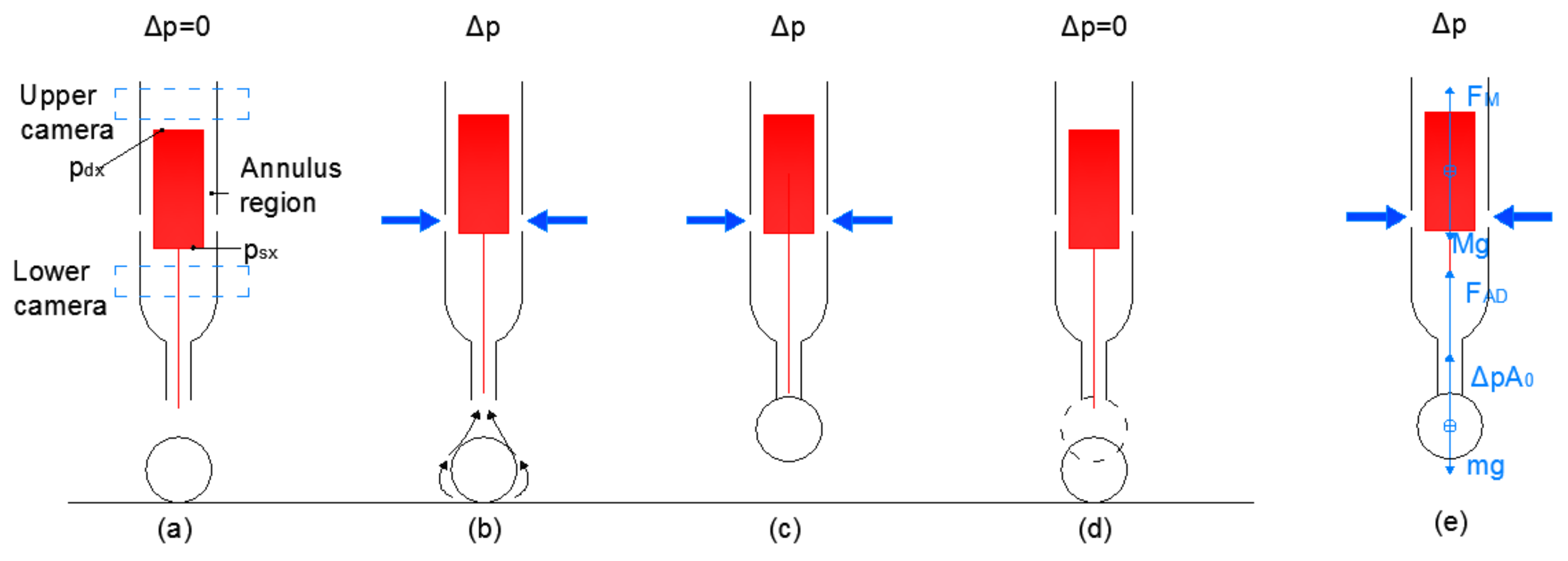
2.1. Vacuum Microgripper and Its Working Principle
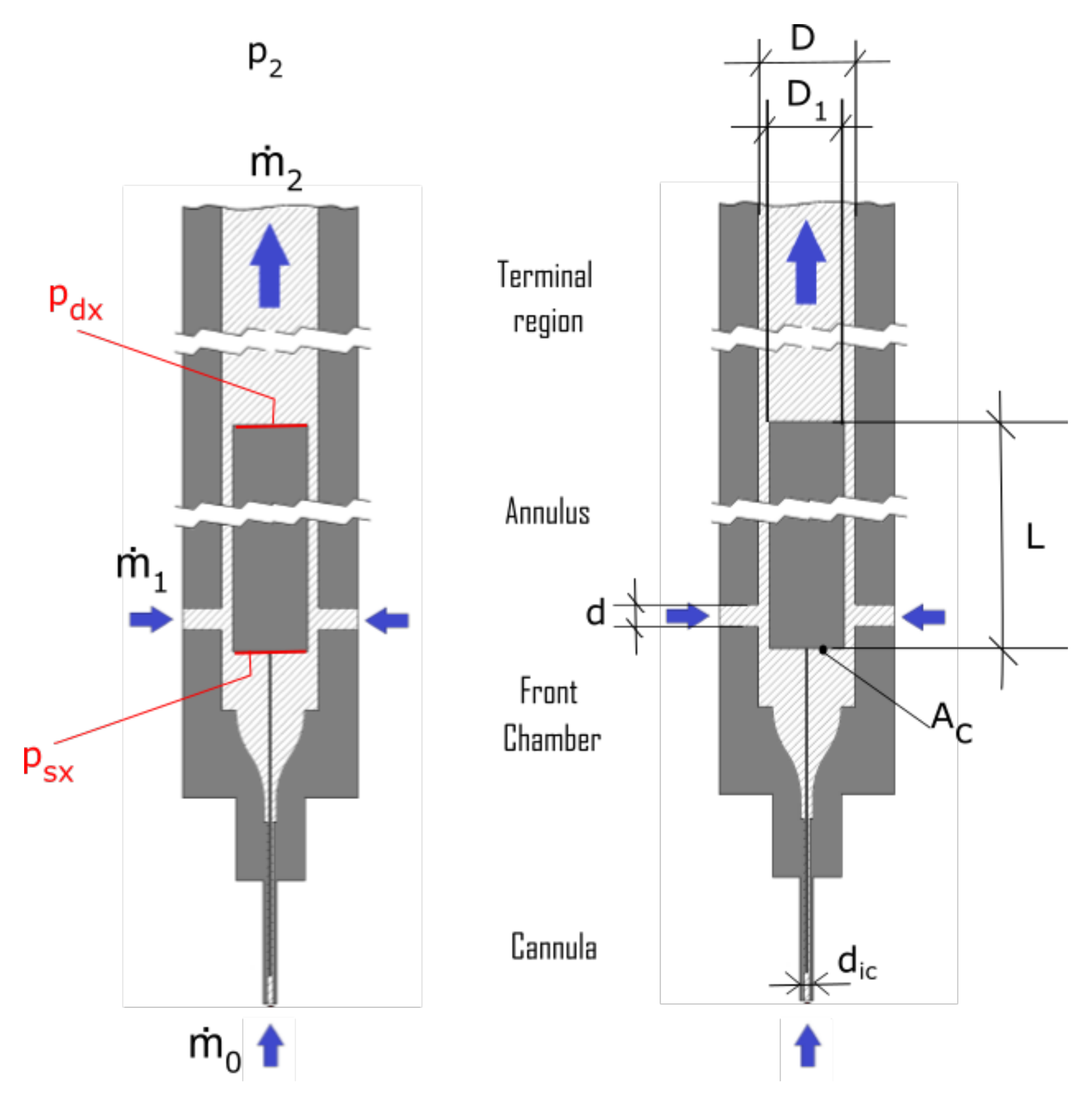
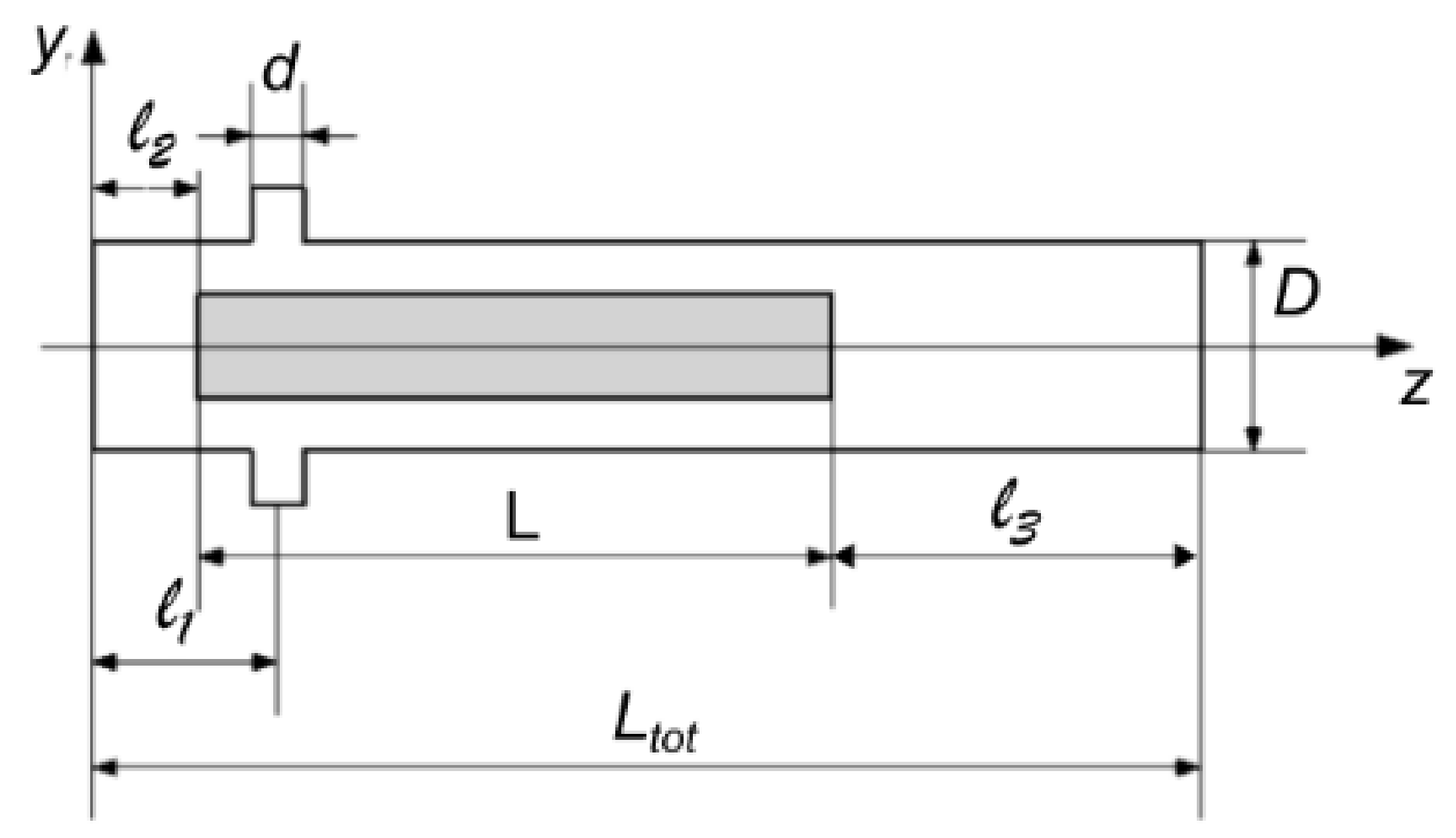
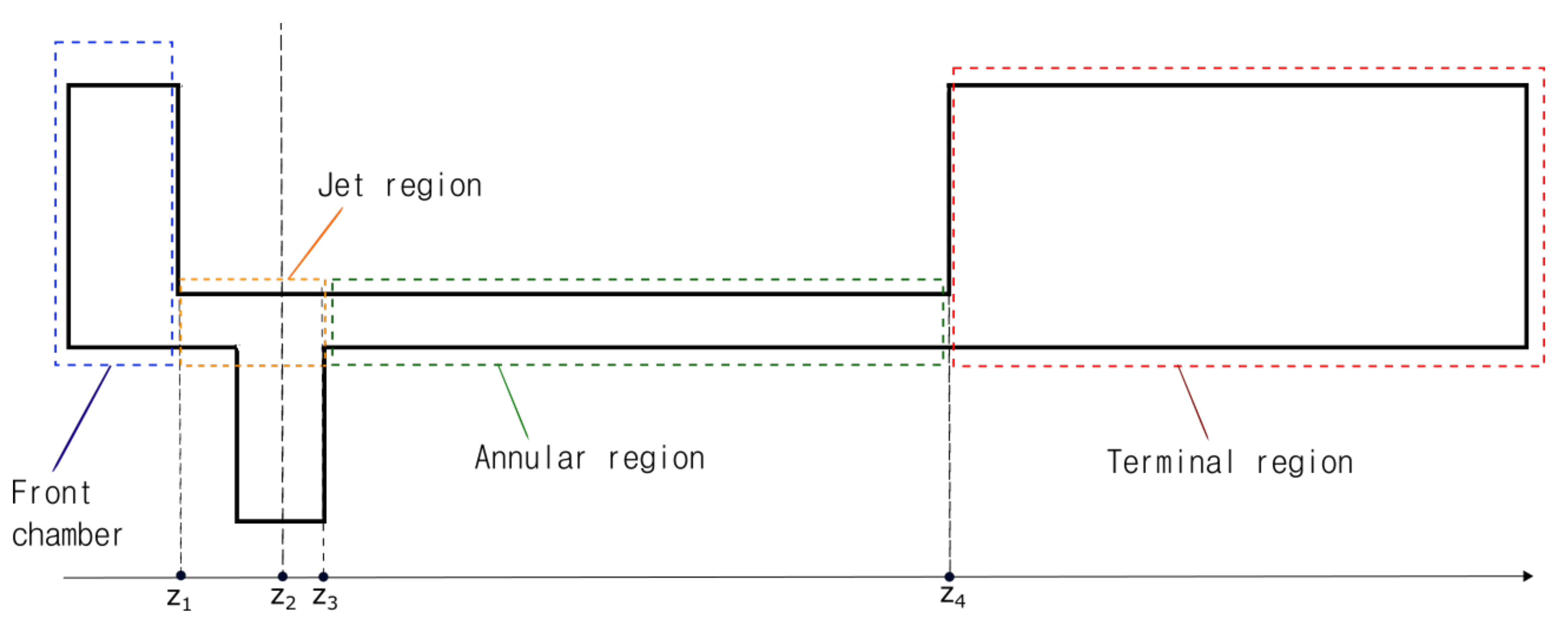
2.2. Simplified Gripper Model
2.3. Design Parameters
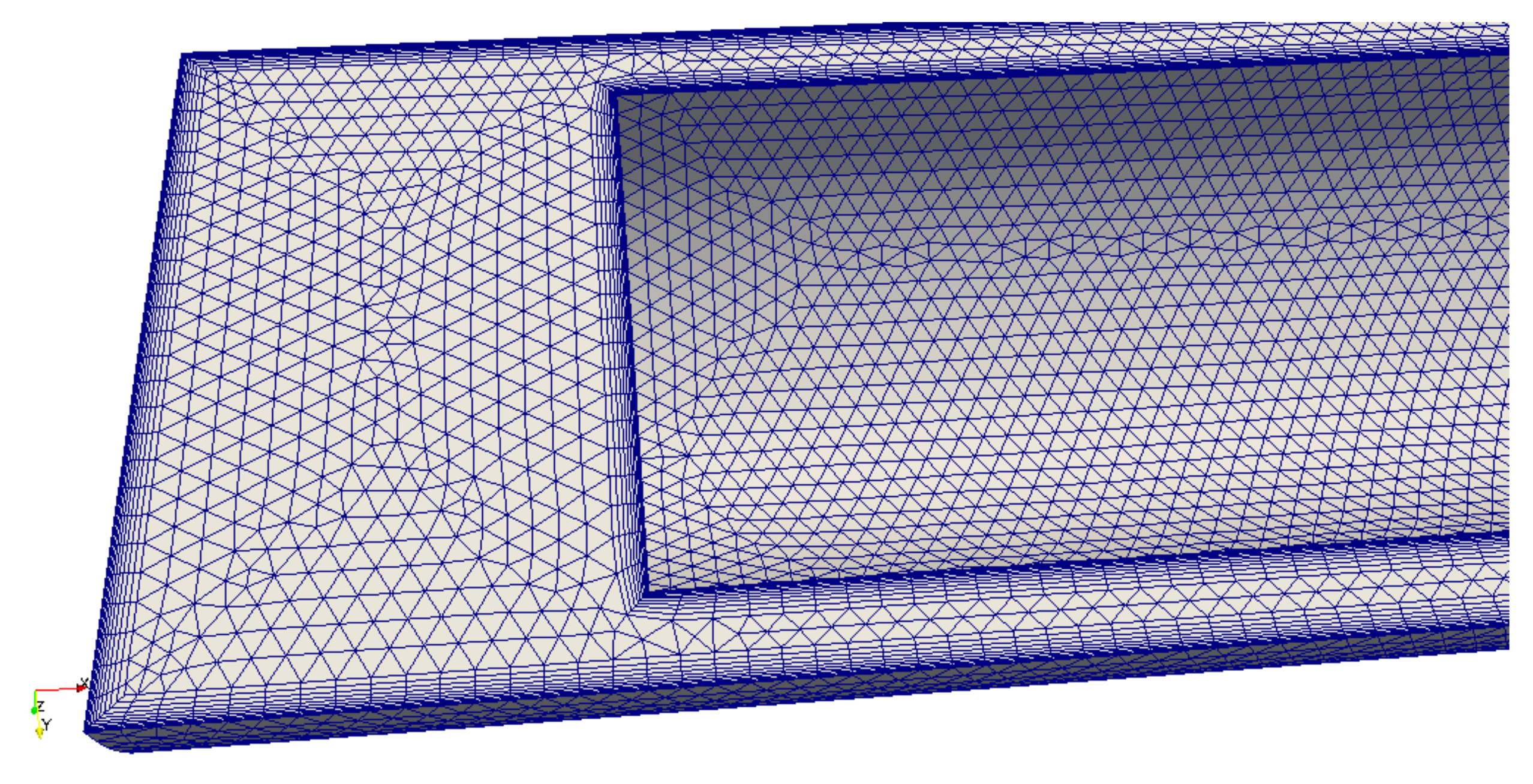
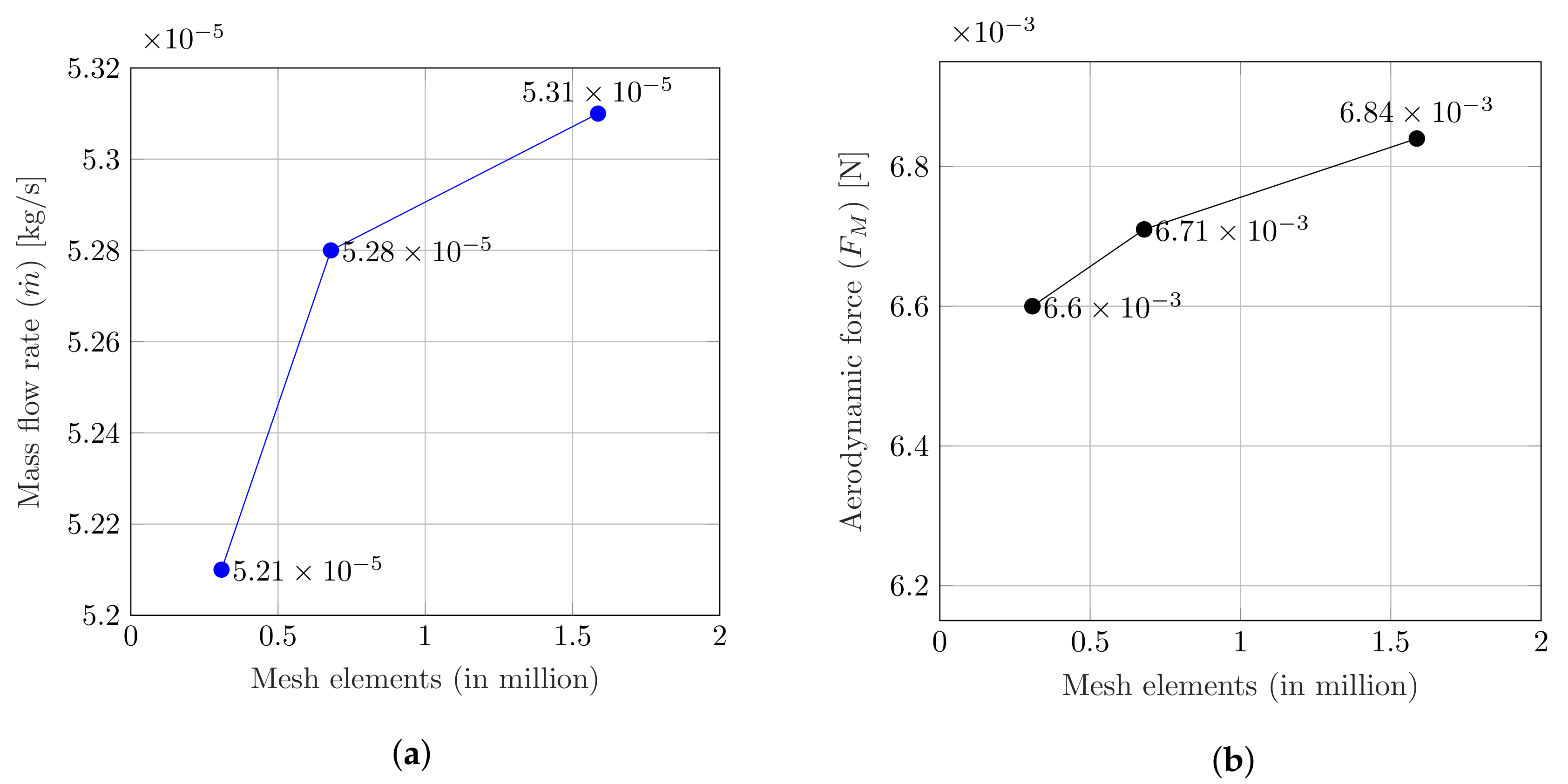
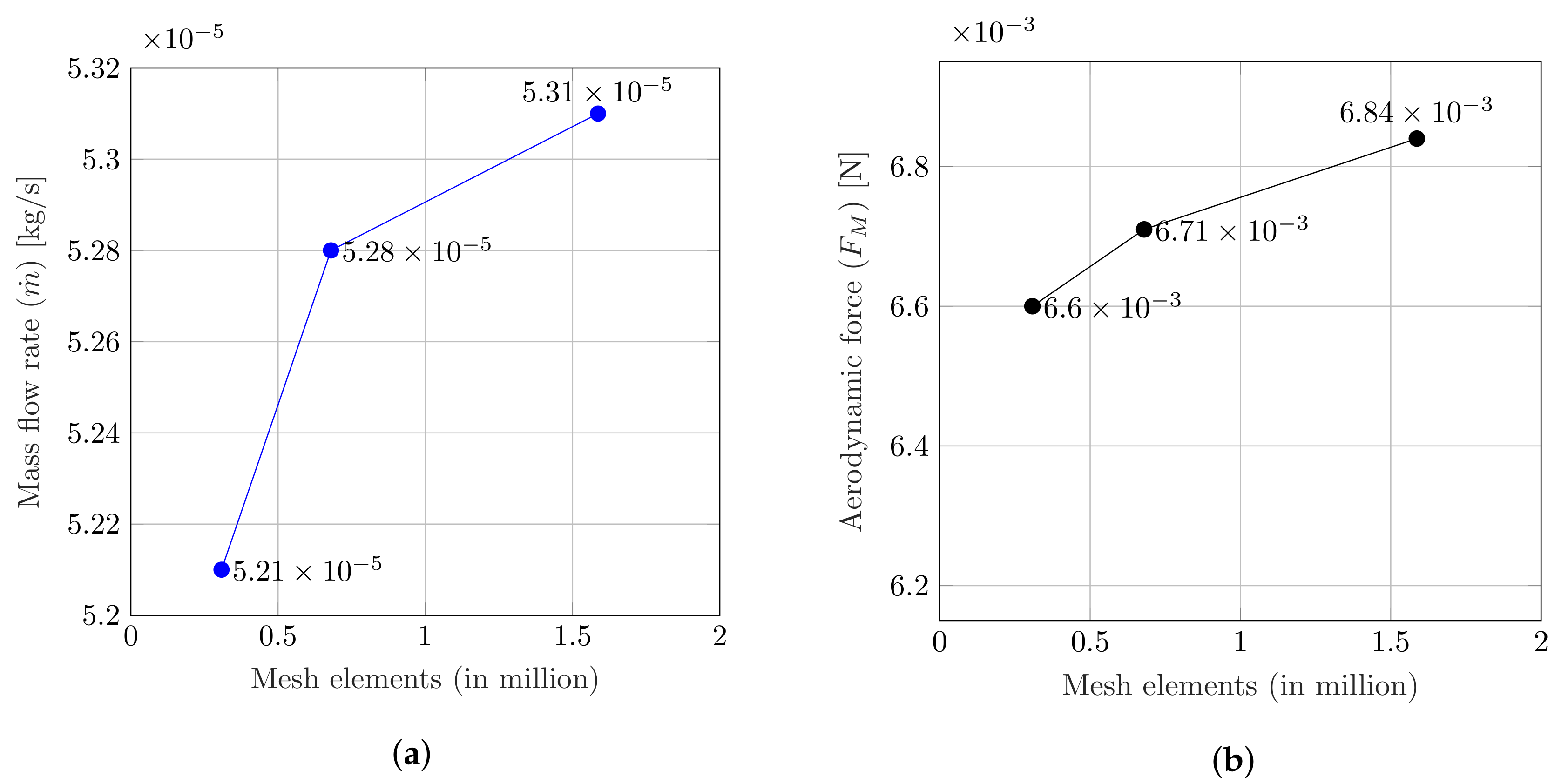
2.4. CFD Analysis
- For each i-th time interval , it computes the average values of mass flow rate () and aerodynamic force ().
- Then, it computes the levels of relative change for mass flow rate and aerodynamic force.
- It stops the simulation when both and fall below a prescribed threshold (i.e., 3) for the first time.
3. Results
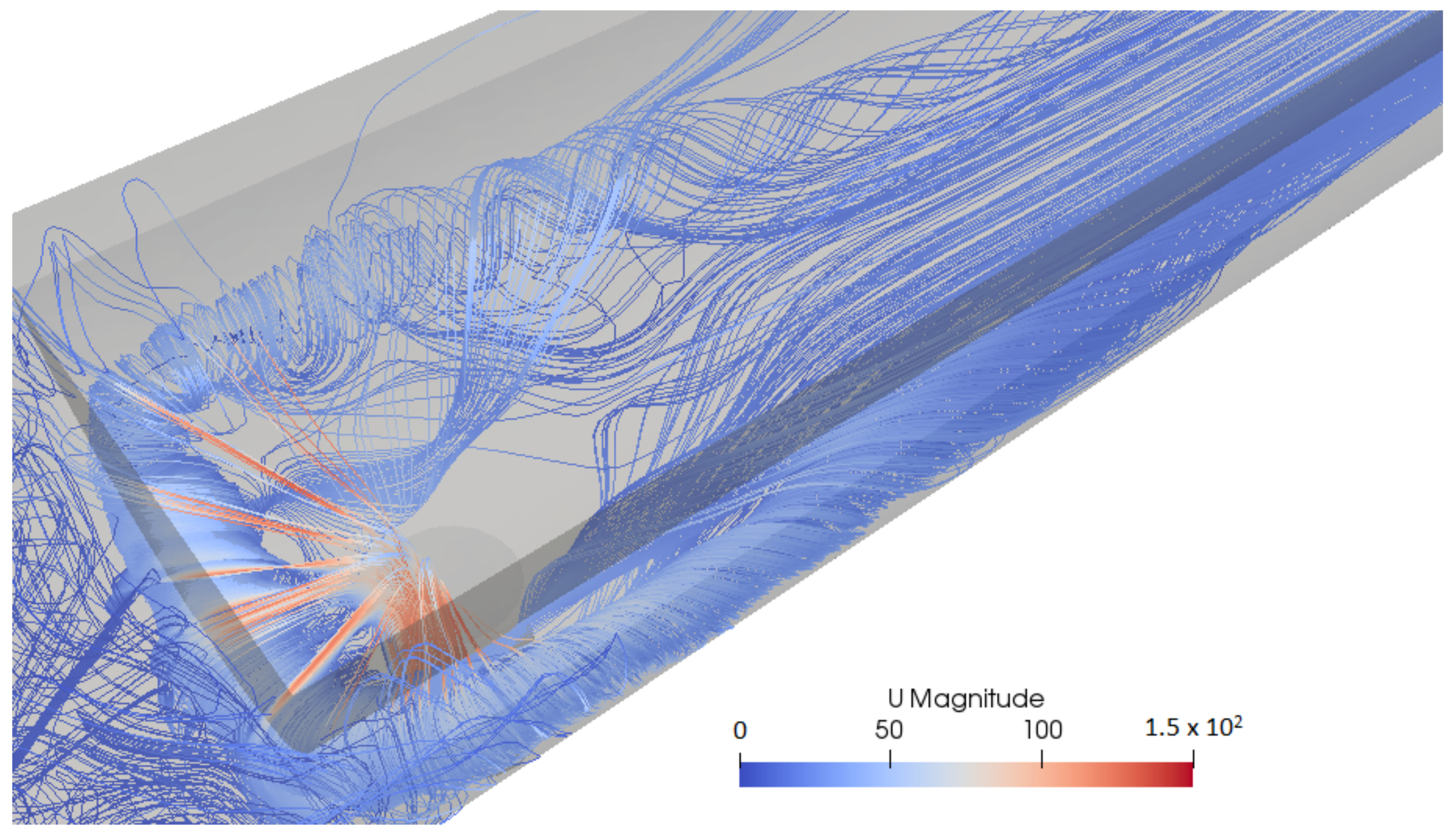
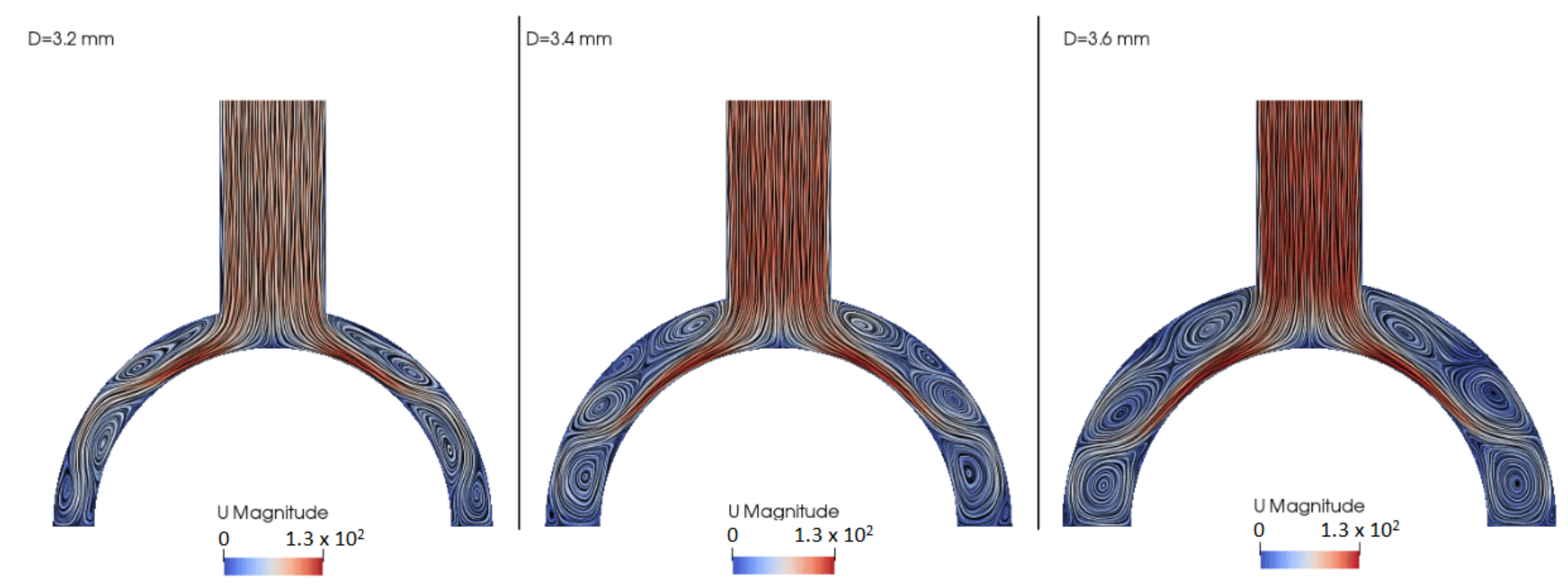
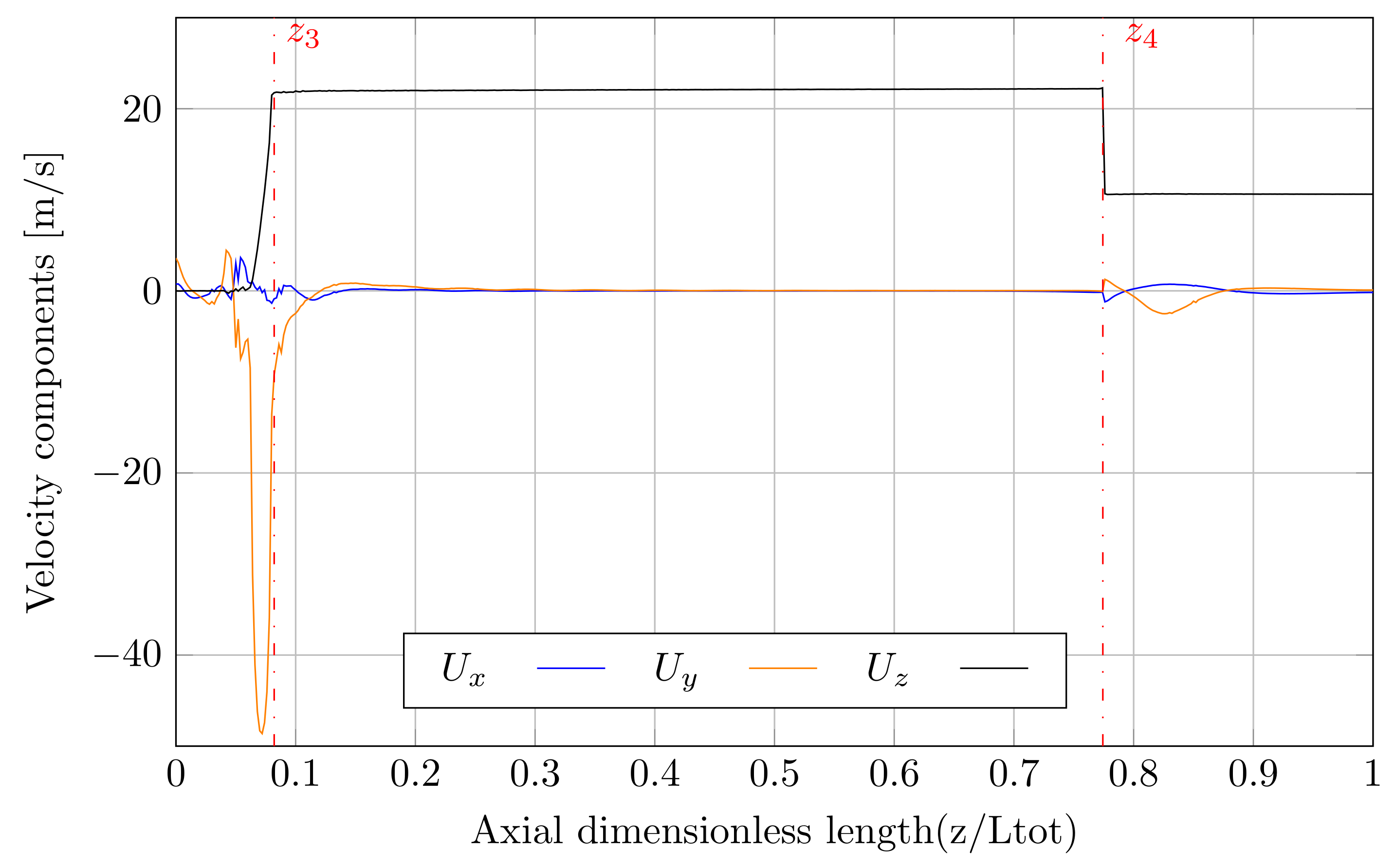
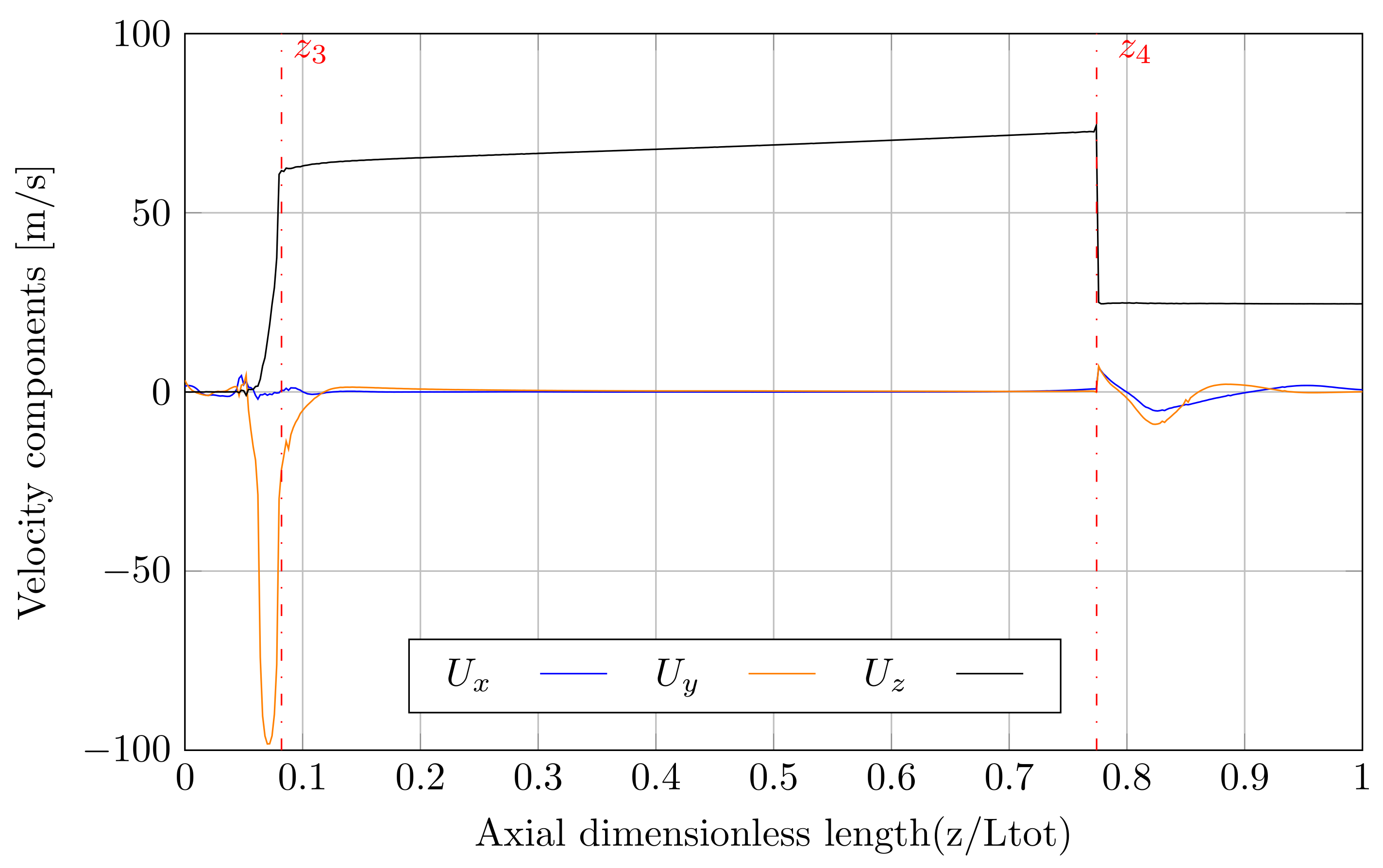
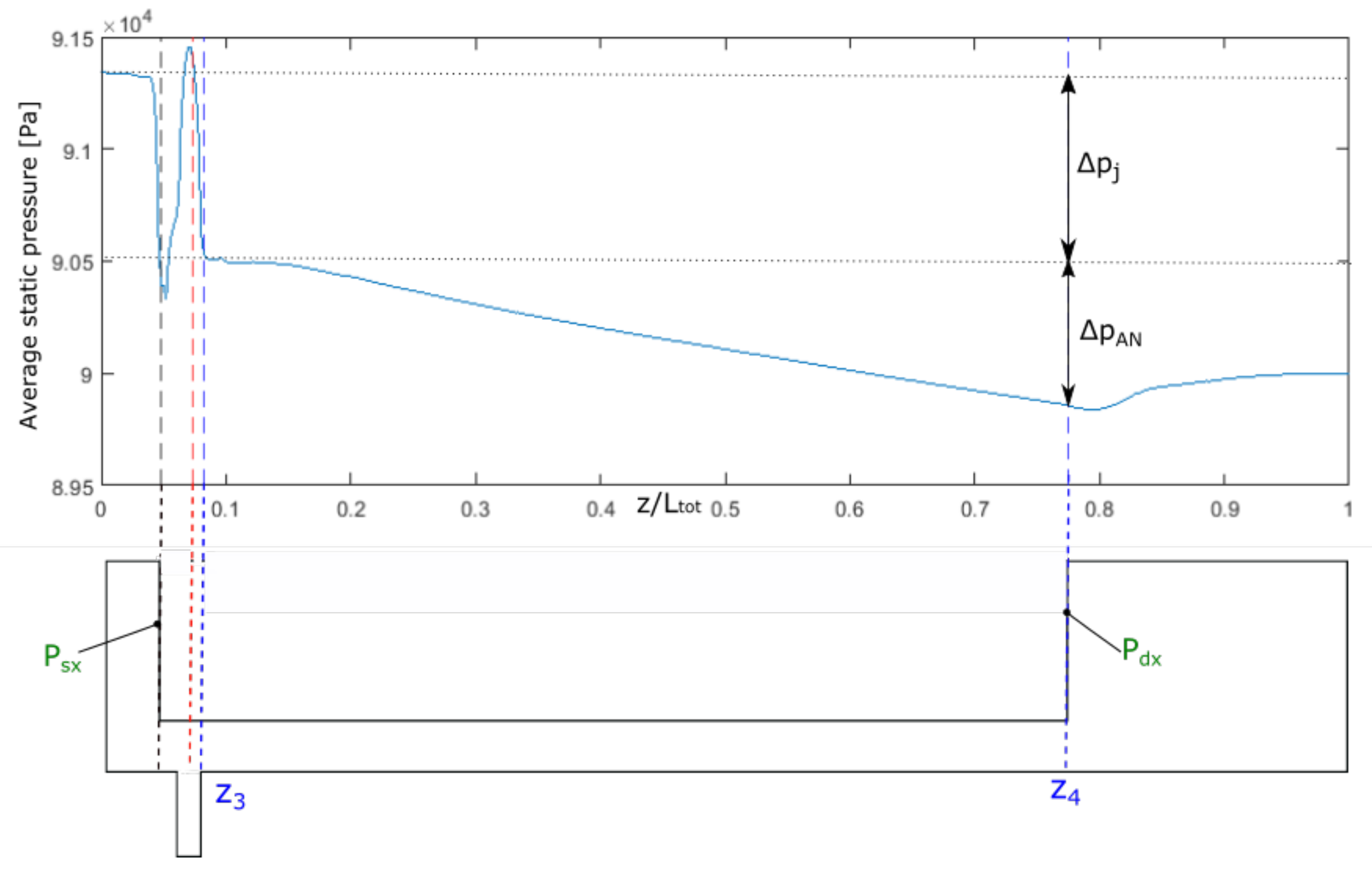
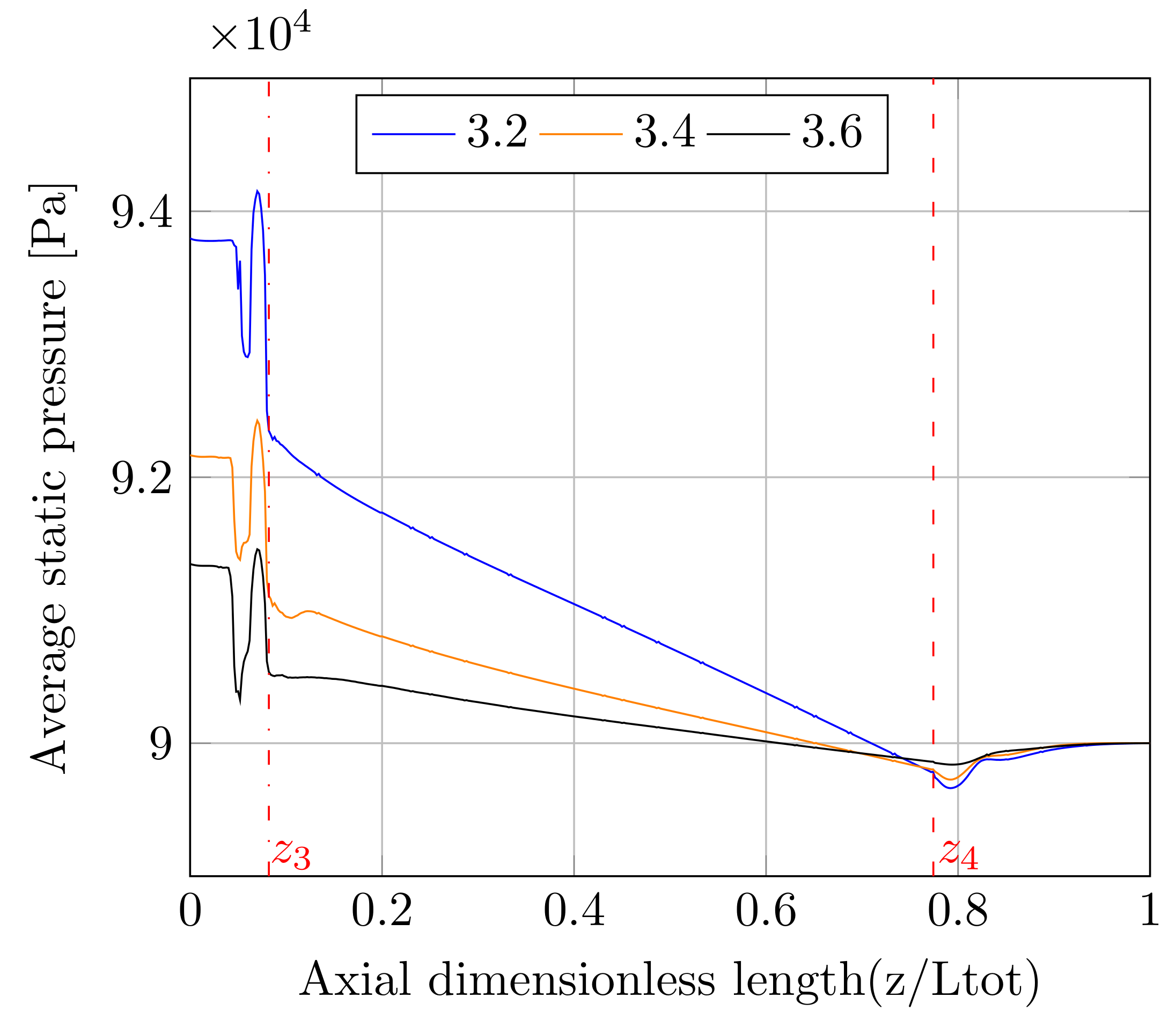
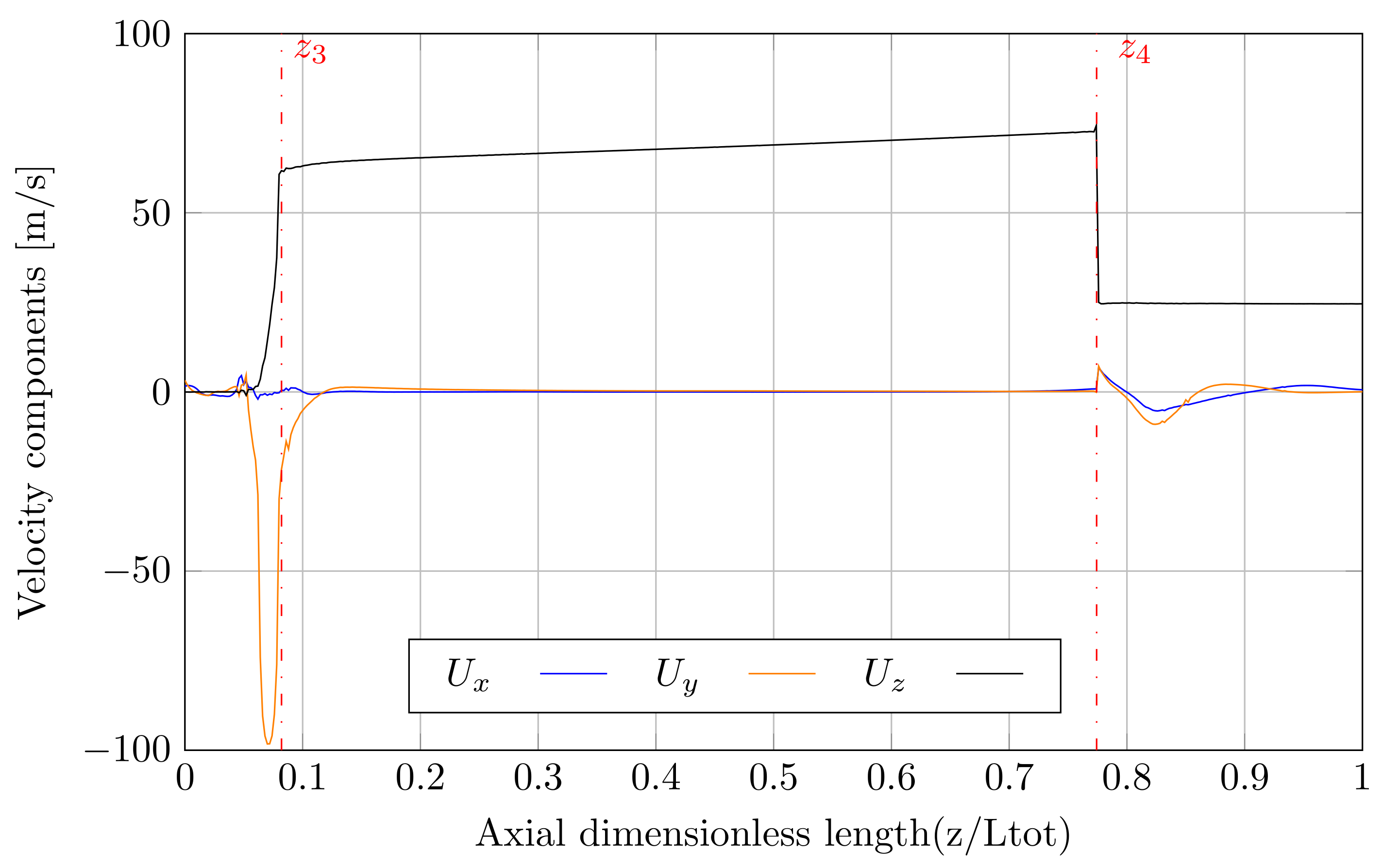
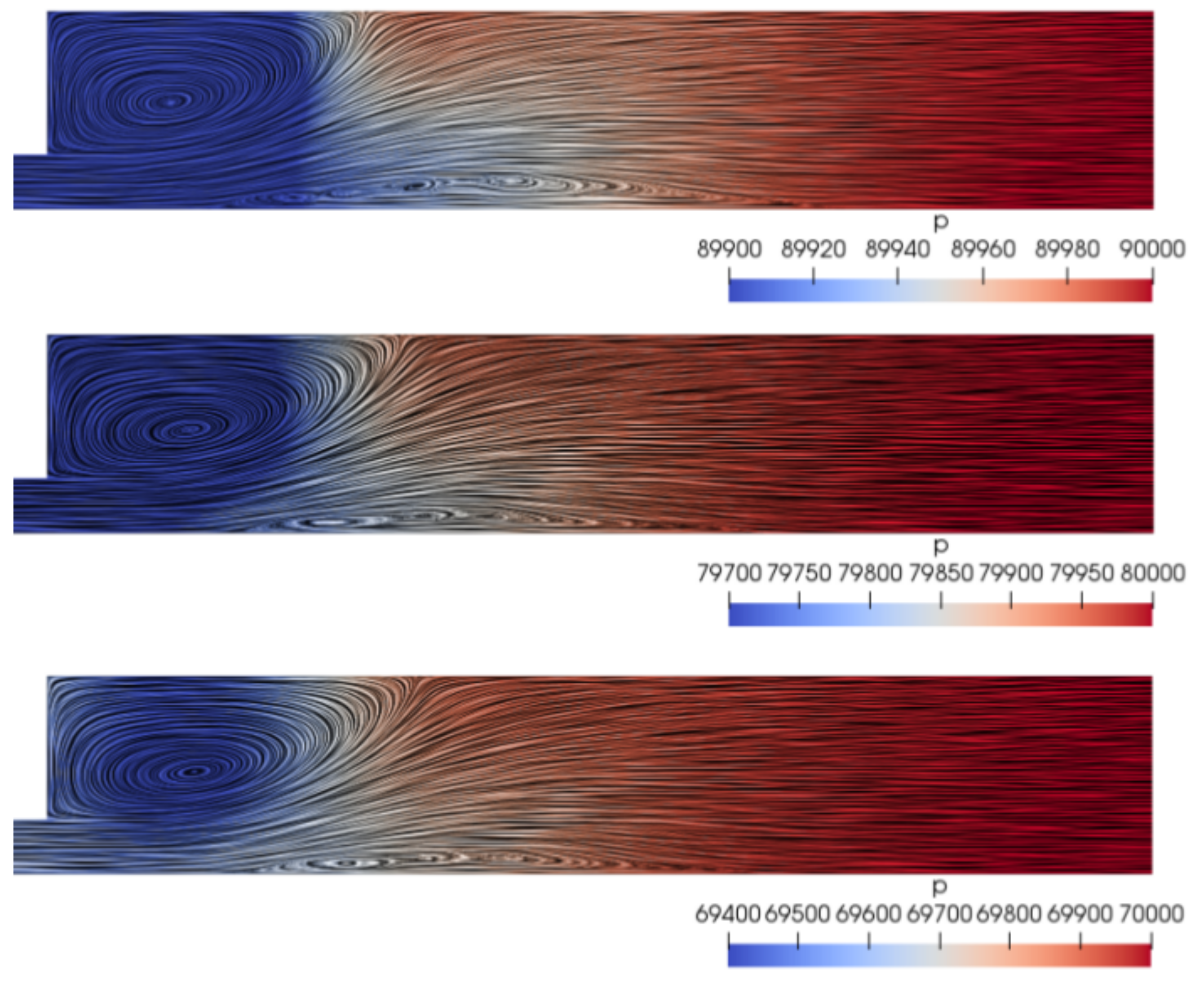
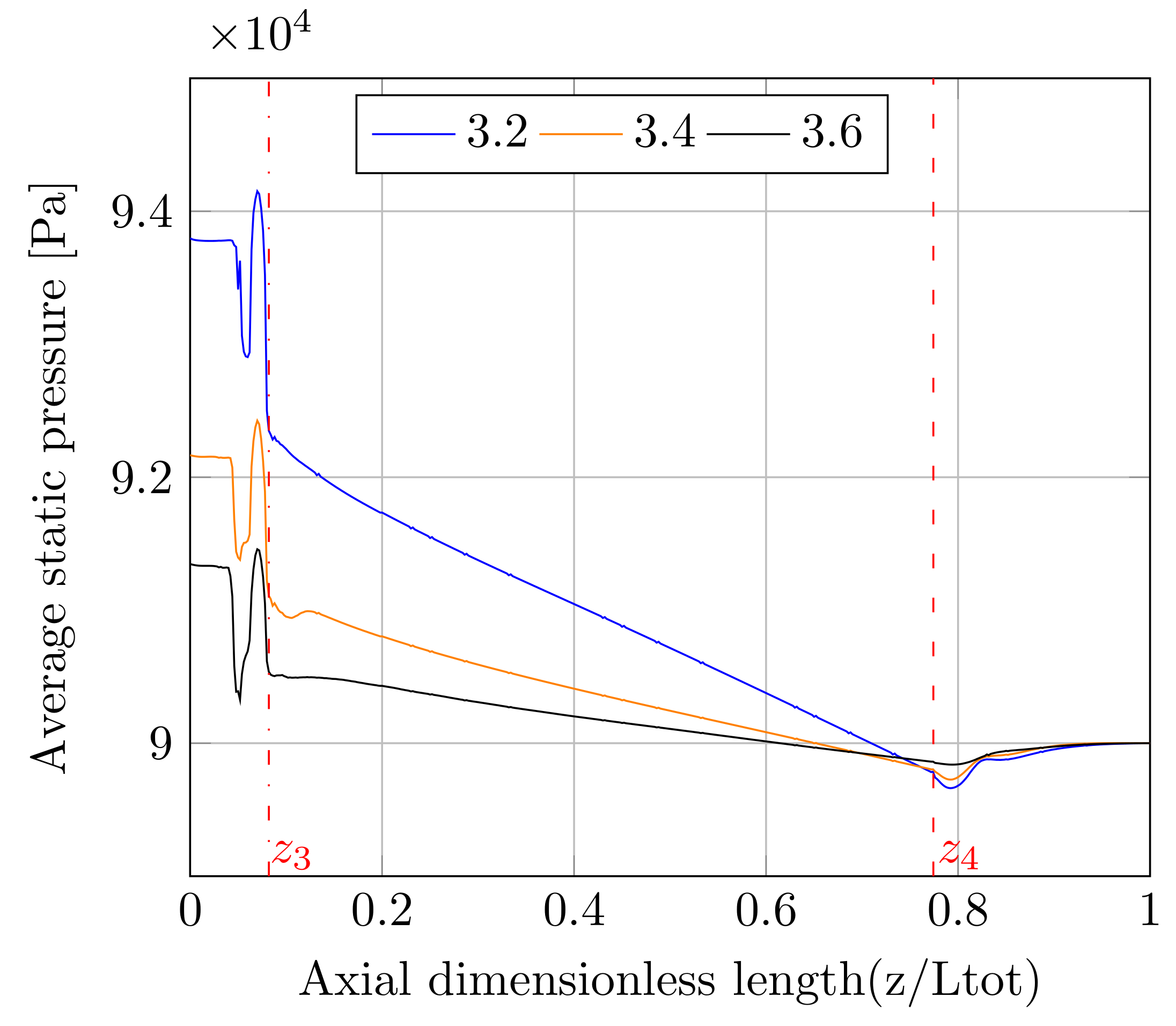
3.1. Fluid Dynamics Phenomena
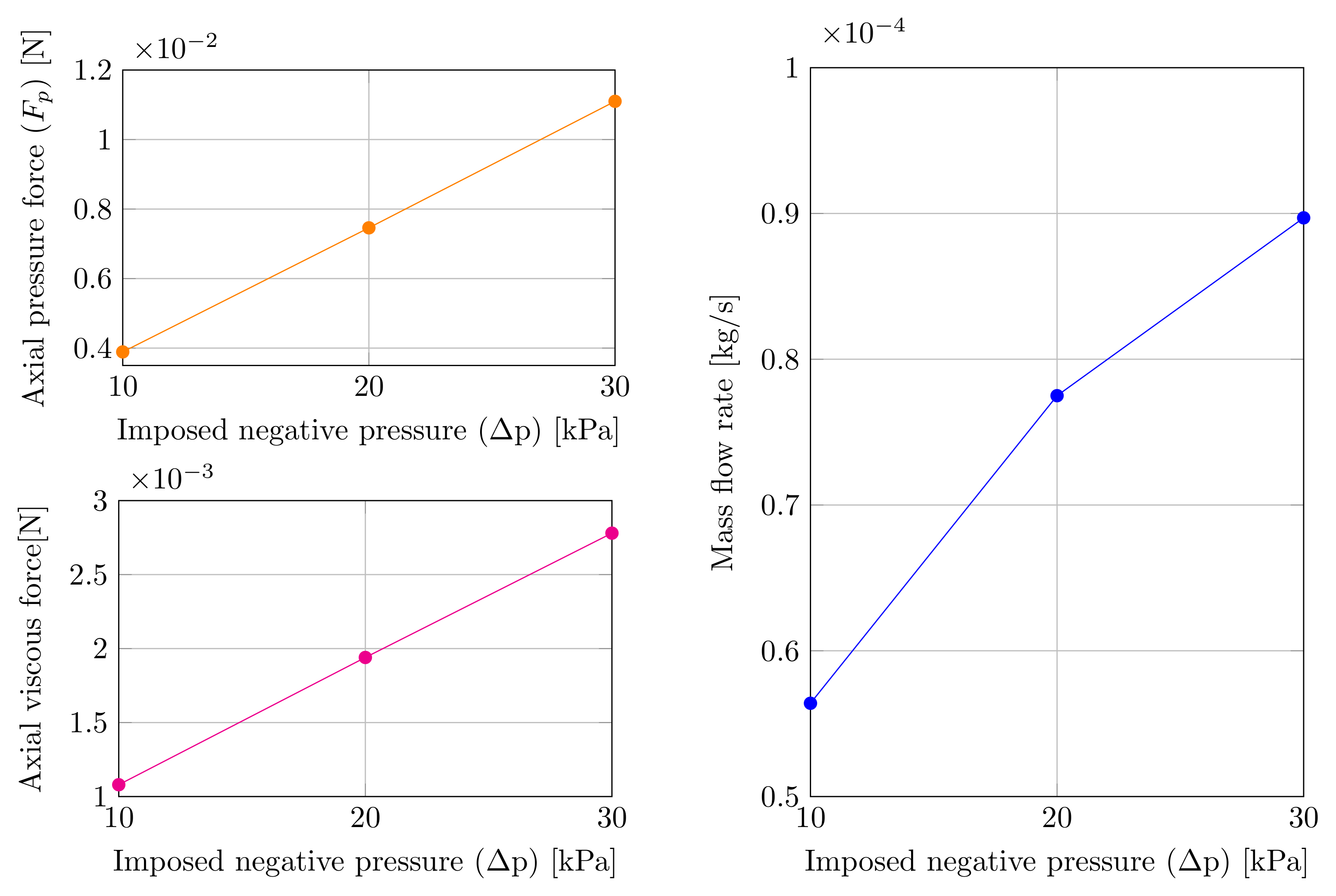
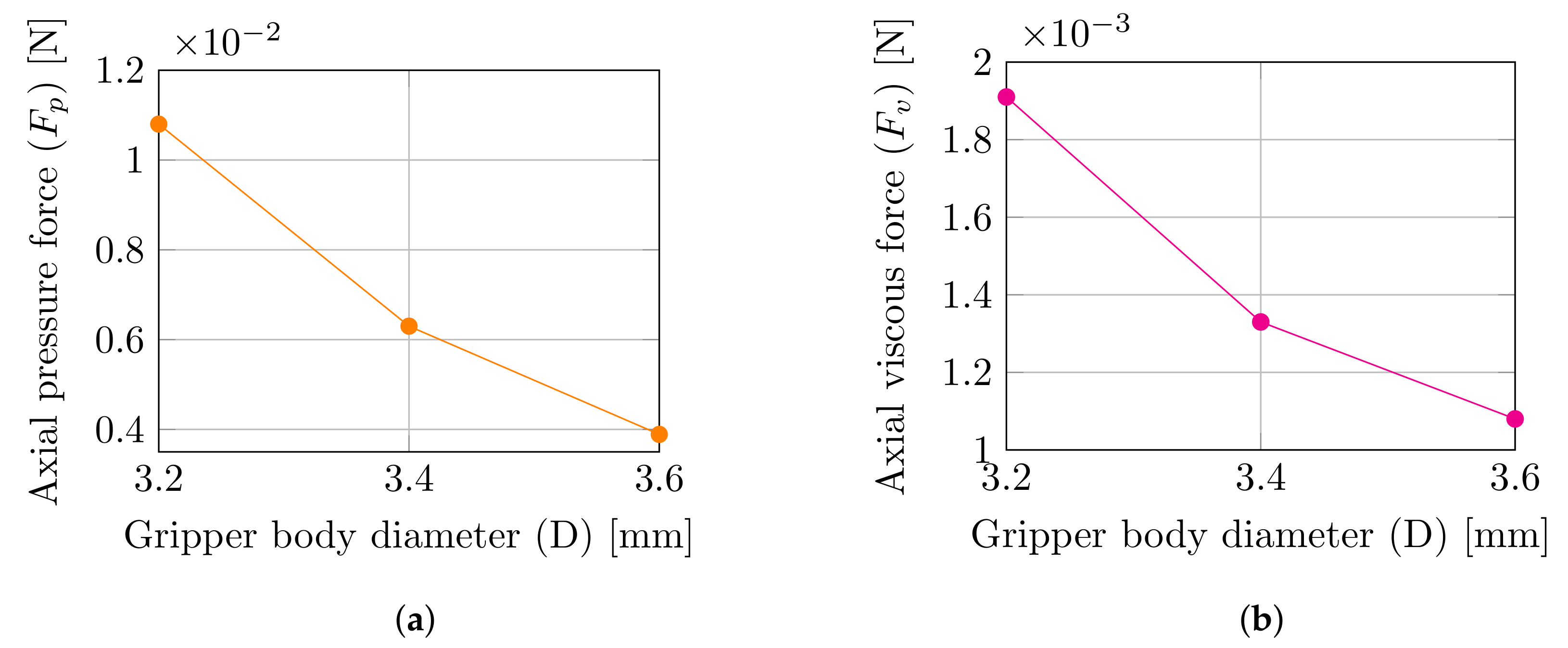
3.2. Data Analysis
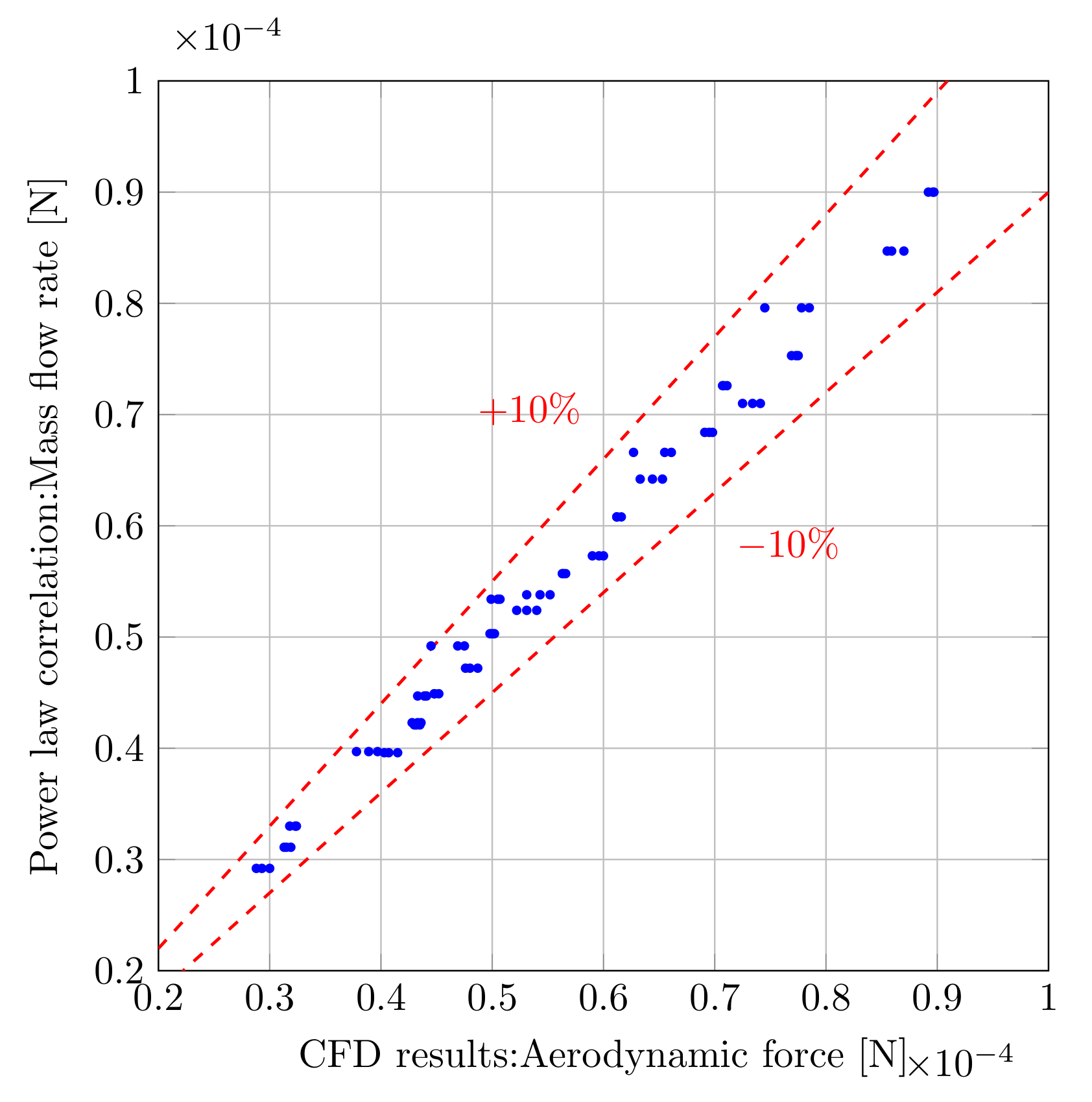
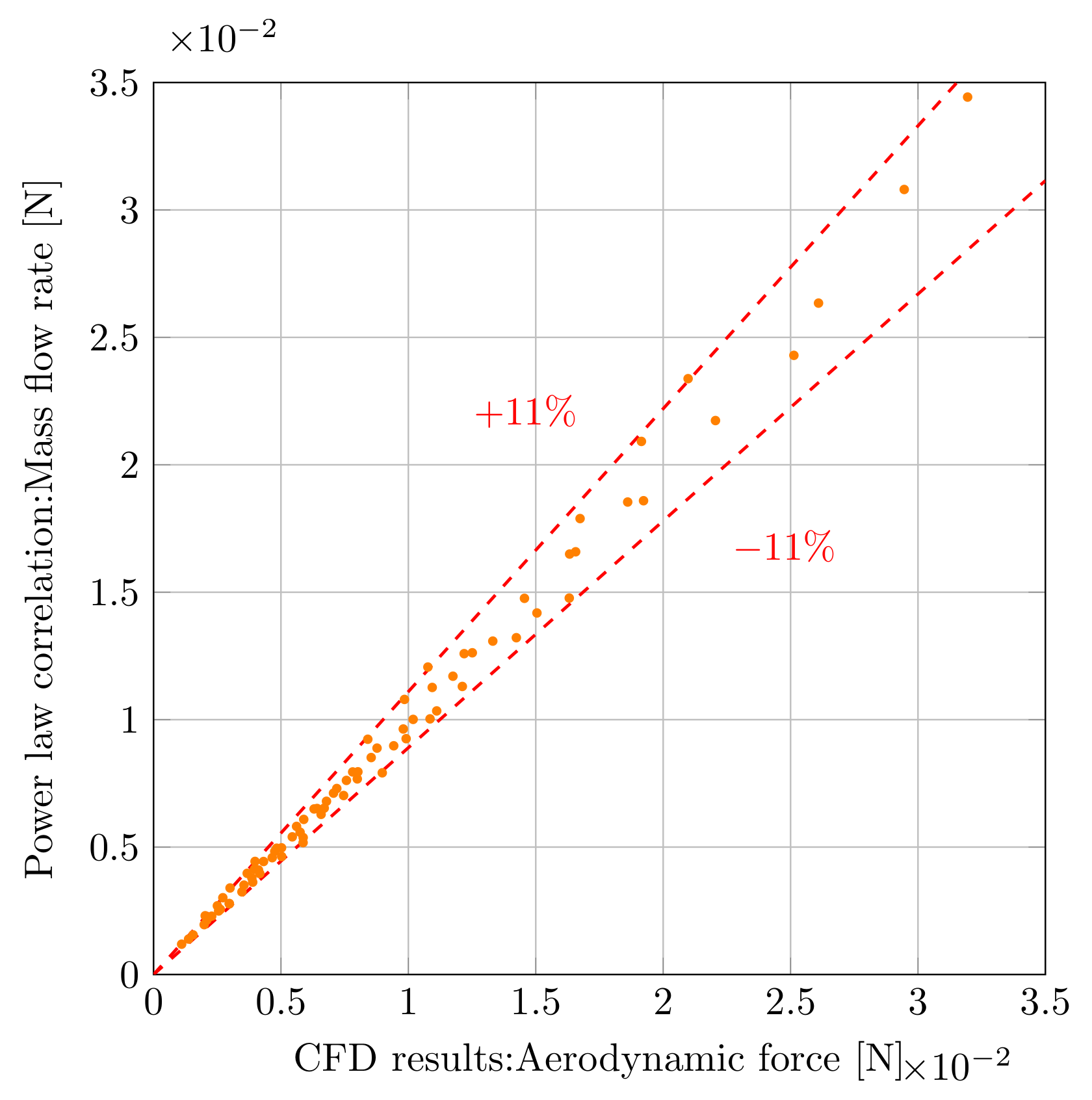
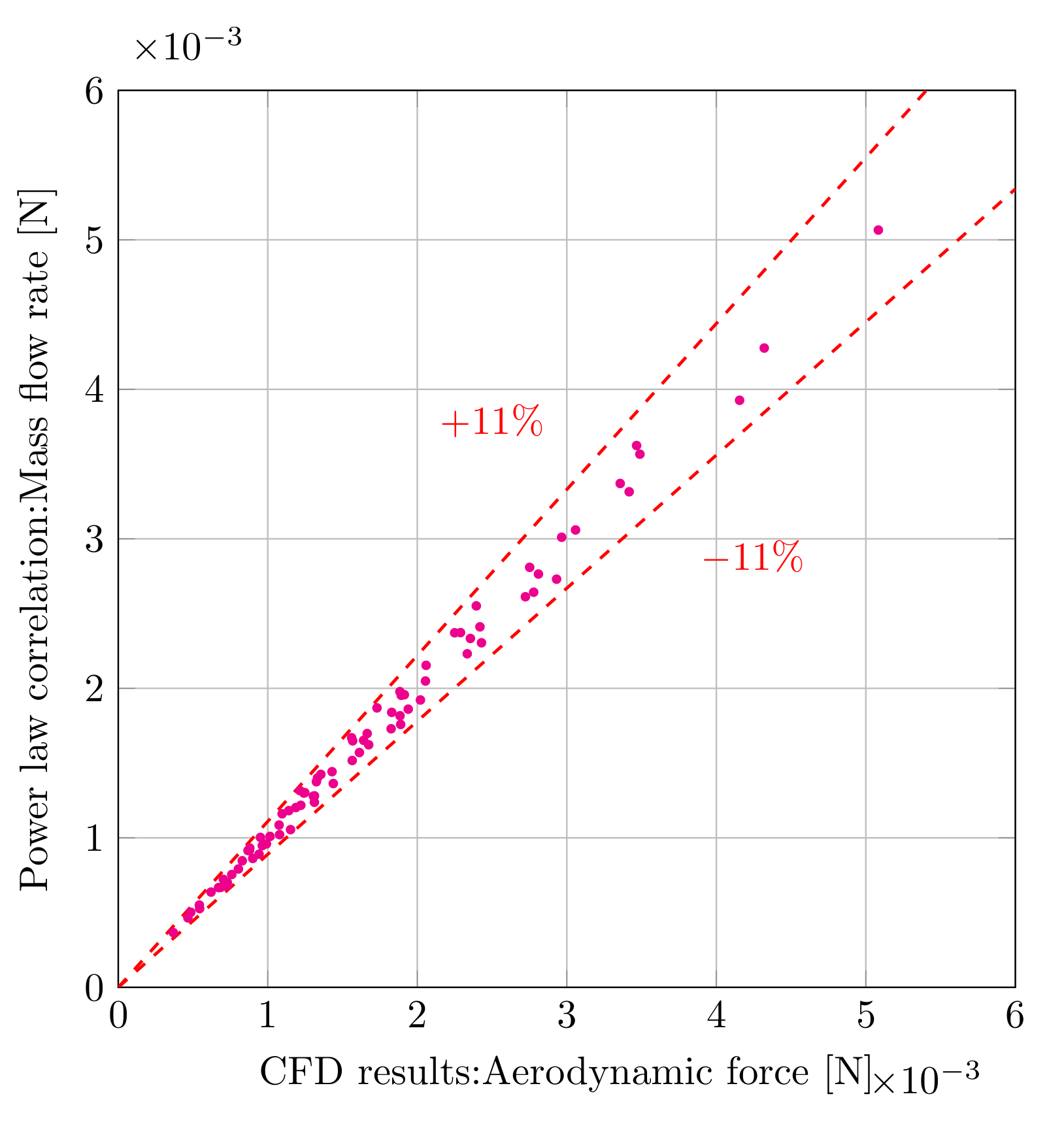
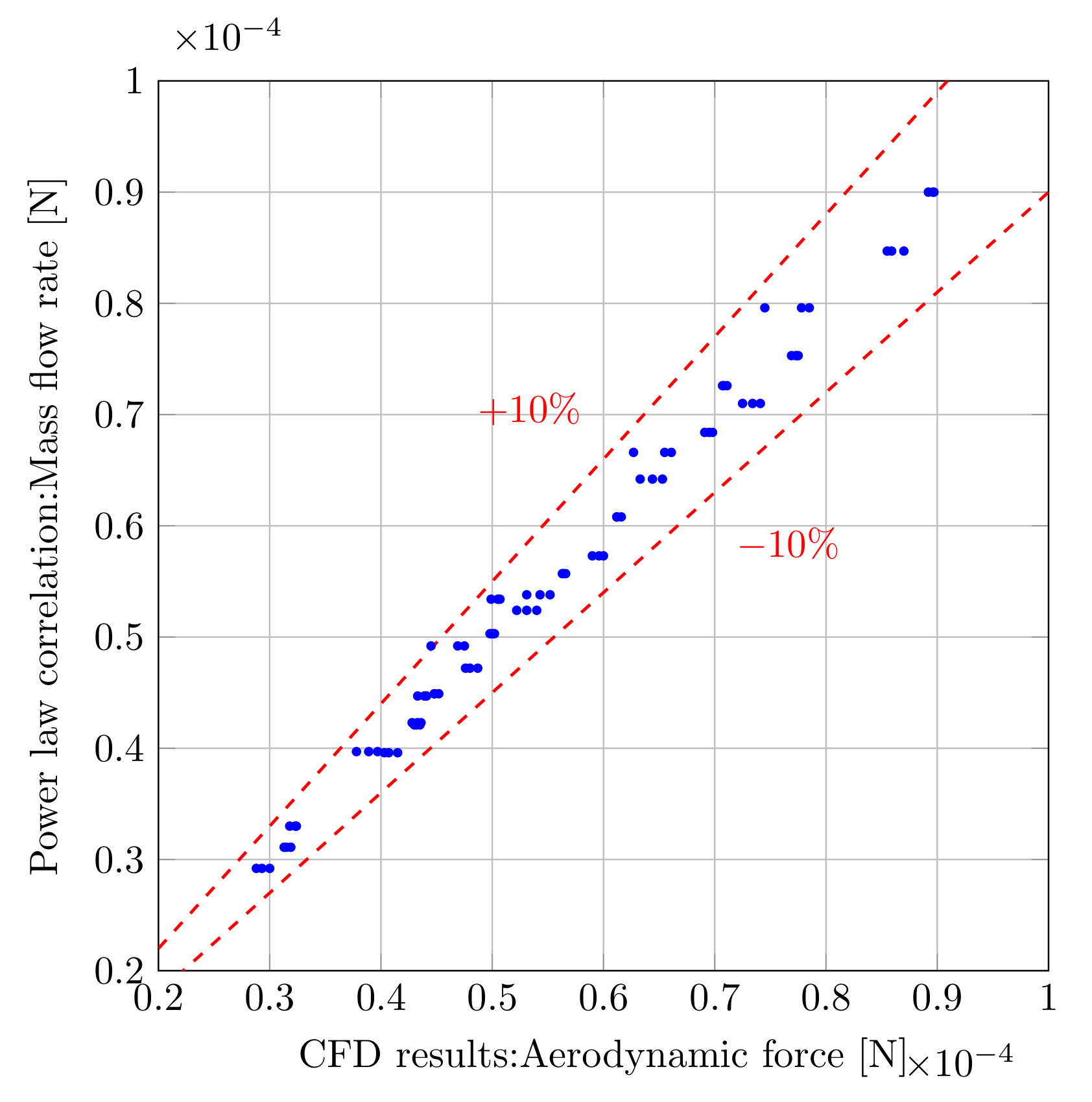
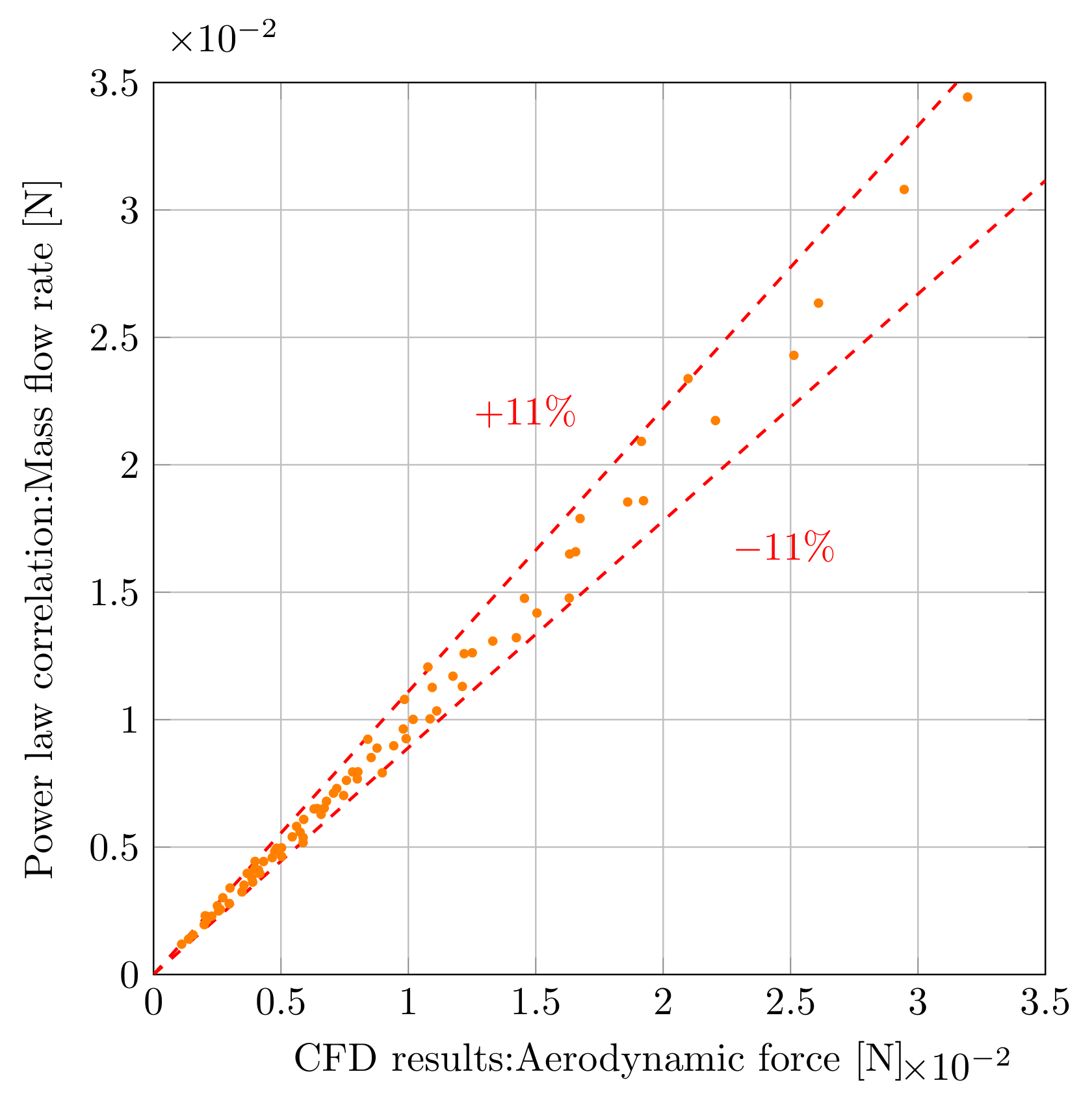
3.3. Empirical Correlations
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Castillo, J.; Dimaki, M.; Svendsen, W.E.; Castillo, J. Manipulation of biological samples using micro and nano techniques. Integr. Biol. 2009, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Gultepe, E.; Randhawa, J.S.; Kadam, S.; Yamanaka, S.; Selaru, F.M.; Shin, E.J.; Kalloo, A.N.; Gracias, D.H. Biopsy with Thermally-Responsive Untethered Microtools. Advenced Mater. 2013, 514–519. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Monkman, G.J.; Hesse, S.; Steinmann, R.; Schunk, H. Robot Grippers; WILEY-VCH: Heppenheim, Germany, 2007. [Google Scholar]
- Nugent, G.C.; Barker, B.S.; Grandgenett, N. Robotics: Concepts methodologies tools and applications. In Impact Educ. Robot. Student STEM Learn. Attitudes, Work. Ski.; IGI Global: Hershey, PA, USA, 2014; pp. 1442–1459. [Google Scholar]
- Madou, M.J. Fundamentals of Microfabrication: The Science of Miniaturization; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Michel, F.; Ehrfeld, W. Mechatronic micro devices. In Proceedings of the 1999 International Symposium on Micromechatronics and Human Science (Cat. No. 99TH8478), Nagoya, Japan, 23–26 November 1999; pp. 27–34. [Google Scholar] [CrossRef]
- Spero, R.C.; Vicci, L.; Cribb, J.; Bober, D.; Swaminathan, V.; Brien, E.T.O.; Rogers, S.L.; Superfine, R. High throughput system for magnetic manipulation of cells , polymers , and biomaterials. Rev. Sci. Instrum. 2011, 79, 083707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Petrovic, D.; Popovic, G.; Chatzitheodoridis, E.; Medico, O.D.; Sümecz, F.; Brenner, W.; Detter, H. Gripping Tools for Handling and Assembly of Microcomponents. In Proceedings of the 23rd International Conference on Microelectronics. Proceedings (Cat. No.02TH8595), Nis, Yugoslavia, 12–15 May 2002; Volume 1, pp. 12–15. [Google Scholar] [CrossRef]
- Zesch, W.; Brunner, M.; Weber, A. Vacuum Tool for Handling Microobjects with a Nanorobot. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997. [Google Scholar]
- Rong, W.; Fan, Z.; Wang, L.; Xie, H.; Sun, L. A vacuum microgripping tool with integrated vibration releasing capability. Rev. Sci. Instrum. 2014, 85, 085002. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, K.; Kajihara, H.; Urago, M.; Saito, S.; Mochimaru, Y.; Onzawa, T. Voltage required to detach an adhered particle by Coulomb interaction for micromanipulation. J. Appl. Phys. 2003, 90, 432–437. [Google Scholar] [CrossRef]
- Ruggeri, S.; Legnani, G.; Fontana, G.; Fassi, I. Design Strategies for Vacuum Micro-Grippers With Integrated Release System. In Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference IDERC/CIE 2017, Cleveland, OH, USA, 6–9 August 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Fearing, R. Survey of Sticking Effects for Micro Parts Handling. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995. [Google Scholar] [CrossRef]
- Fontana, G.; Ruggeri, S.; Legnani, G.; Fassi, I. Precision handling of electronic components for PCB rework. In Proceedings of the International Precision Assembly Seminar IPAS, Chamonix, France, 16–18 February 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 52–60. [Google Scholar] [CrossRef]
- Fontana, G.; Ruggeri, S.; Ghidoni, A.; Morelli, A.; Legnani, G.; Lezzi, A.M.; Fassi, I. Fluid Dynamics Aided Design of an Innovative Micro-Gripper. In Proceedings of the International Precision Assembly Seminar IPAS, Chamonix, France, 14–16 January 2018; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; Volume 1, pp. 214–225. [Google Scholar] [CrossRef] [Green Version]
- OpenFOAM 4.1. Available online: https://openfoam.org (accessed on 13 October 2016).
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef] [Green Version]
- Mishra, A.A.; Mukhopadhaya, J.; Iaccarino, G.; Alonso, J. Uncertainty estimation module for turbulence model predictions in SU2. AIAA J. 2019, 57, 1066–1077. [Google Scholar] [CrossRef]
- Heyse, J.F.; Mishra, A.A.; Iaccarino, G. Estimating RANS model uncertainty using machine learning. J. Glob. Power Propuls. Society. Spec. Issue Data Driven Model. High-Fidel. Simul. 2021, 1–14. [Google Scholar] [CrossRef]
- Python Language Reference, Version 3.0. Available online: http://www.python.org (accessed on 8 March 2020).
- Urbano, D.G.; Noventa, G.; Fontana, G.; Fassi, I.; Legnani, G.; Ghidoni, A.; Lezzi, A.M. CFD Analysis of an innovative vacuum micro-gripper. In Proceedings of the International Conference of Heat Transfer Fluid Mechanics and Thermodynamics, Wicklow, Ireland, 22–24 July 2019. [Google Scholar]
- Draper, N.R.; Smith, H. Applied Regression Analysis; John Wiley & Sons: Hoboken, NJ, USA, 1998; Volume 326. [Google Scholar]
- Kim, J.A.E.H.; Choi, I.N. Choosing the Level of Significance: A Decision-theoretic Approach. ABACUS 2019, 1–45. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Factor | Low | Middle | High |
|---|---|---|---|
| d [mm] | 0.59 | 0.69 | 0.77 |
| L [mm] | 16.2 | 24.2 | 32.2 |
| D [mm] | 3.2 | 3.4 | 3.6 |
| Δp [kPa] | 10 | 20 | 30 |
| Grid Density | Elements | [mm] | [mm] | |
|---|---|---|---|---|
| Coarse | 8 | |||
| Medium | 10 | |||
| Fine | 12 |
| Associated Variable | p-Value | Model Coefficients |
|---|---|---|
| Intercept | <2 | 9.88 |
| d | <2 | 1.9578 |
| L | 0.00454 | −0.0141 |
| D | <2 | 1.0428 |
| Δp | <2 | 0.4371 |
| Associated Variable | p-Value | Model Coefficients |
|---|---|---|
| Intercept | <2 | 114.2668 |
| d | <2 | 3.1780 |
| L | <2 | 0.3896 |
| D | <2 | −10.2100 |
| Δp | <2 | 0.9545 |
| Associated Variable | p-Value | Model Coefficients |
|---|---|---|
| Intercept | <2 | 3.85 |
| d | <2 | 2.3213 |
| L | <2 | 0.5931 |
| D | <2 | −5.5231 |
| Δp | < 2 | 0.8655 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Urbano, D.G.; Noventa, G.; Ghidoni, A.; Lezzi, A.M. A Semi-Empirical Fluid Dynamic Model of a Vacuum Microgripper Based on CFD Analysis. Appl. Sci. 2021, 11, 7482. https://doi.org/10.3390/app11167482
Urbano DG, Noventa G, Ghidoni A, Lezzi AM. A Semi-Empirical Fluid Dynamic Model of a Vacuum Microgripper Based on CFD Analysis. Applied Sciences. 2021; 11(16):7482. https://doi.org/10.3390/app11167482
Chicago/Turabian StyleUrbano, Dario Giuseppe, Gianmaria Noventa, Antonio Ghidoni, and Adriano M. Lezzi. 2021. "A Semi-Empirical Fluid Dynamic Model of a Vacuum Microgripper Based on CFD Analysis" Applied Sciences 11, no. 16: 7482. https://doi.org/10.3390/app11167482
APA StyleUrbano, D. G., Noventa, G., Ghidoni, A., & Lezzi, A. M. (2021). A Semi-Empirical Fluid Dynamic Model of a Vacuum Microgripper Based on CFD Analysis. Applied Sciences, 11(16), 7482. https://doi.org/10.3390/app11167482