In this section, we first illustrate the Manhattan distance and present the objective function based on the Manhattan distance. Then, we apply a statistical approach to obtain the global minimizer for the continuous-space single-facility location problem, where several properties of the minimizer can be obtained. With these properties of the minimizer, we can drive optimization procedures in searching for the globally optimal facility locations.
3.2. Minimum Distance Approach
In this subsection, we provide the three-dimensional single-facility location methods for the Manhattan distance. With the objective function of
in (3), let
be the optimal facility location. Then, we have
The minimizer of
in (3), denoted by
, can be obtained by the following estimating equations that need to be solved for
,
, and
according to Section 1.3 of Hettmansperger and McKean [
57].
Then, the optimal values
,
, and
can be calculated separately. It is easily seen that they are the weighted medians of the
-axis,
-axis, and
-axis observations, which will be detailed later. Note that the weighted median was first suggested by Edgeworth [
58] and since then it has been widely used in many applications [
59]. As an illustration, we briefly introduce the conventional median first and then the weighted median. As the values
,
, and
can be obtained separately, we only consider the weighted median for the
-axis observations. Then, the weighted medians for the
-axis and
-axis observations are easily obtained using the same method.
Definition 1. Given a set of observations,, …, , the empirical cumulative distribution function is defined as
where
represents the indicator function defined as
Definition 2. Csorgo [60] defined the left sample quantile function (inverse cumulative distribution function) as below. Using this, the conventional median
is obtained as:
where
.
Definition 3. Wasserman [61]defined the right sample quantile function (inverse cumulative distribution function), which is given by Note that the definition by Wasserman [
61] is slightly different to that of Csorgo [
61]. It is easily seen that
Thus, the sample quantile by Csorgo [
60] is called the left quantile, while the sample quantile by Wasserman [
61] is the right quantile. Rychlik [
62] and Hosseini [
63] showed that
Based on the quantile function by Wasserman [
61], we have the corresponding median
, which is obtained as:
where
.
It is obvious that the difference between (13) and (15) is the case when with even . It is obvious that (13) takes the left bound value and (15) takes the right bound value. Moreover, both of them are the minimizers (medians) to the total Manhattan distance of the -axis observations.
The above definitions on the empirical distribution and the sample quantile do not consider the weights of the observations. Thus, the definitions with weights are given below.
Definition 4. Given a set of observations,, …, with corresponding positive weights ,
, …, such that , we have the empirical cumulative distribution function with weights, which is defined as
Note that the above
includes the conventional empirical cumulative distribution function
in (8), as a special case when
. Similar to the definition of the sample quantile function in Csorgo [
60], we define the sample quantile function with weights.
Definition 5. Given a set of observations,, …, with corresponding positive weights ,, …, such that , the sample left and right quantiles with weights are given by
Next, our goal is to obtain the minimizer of the
in (3). As the weighted medians for the
-axis,
-axis, and
-axis observations can be calculated separately, we only focus on the weighted median of
-axis observations, which are given by
where
is the weight for
.
According to the equations in (14) and (20), we can deduce the following equation. Then, we have
It is obvious that the above minimizes the weighted Manhattan distance. However, it is not a unique minimizer when there is a tied value at. Thus, we have two cases and both of them are the minimizers to the objective function:
- (i)
and
- (ii)
and
Because the minimizer of
, denoted by
,
, and
can be calculated separately. Based on the weighted median obtained in this subsection, the globally optimal location of the facility in a three-dimensional space is given by
In addition, the globally optimal location of the facility in a two-dimensional plane is easily obtained by (22) and (23). For the higher-dimensional () globally optimal facility location problem with Manhattan distance, the main task is to calculate each of the weighted medians for all the axes. Then, the optimal facility location in a higher-dimensional hyperspace can be obtained.
3.3. Properties of the Minimizer
Next, we derive the properties of the globally optimal locations for the continuous-space multi-facility location problem. As obtained of the minimizer for
, the globally optimal single-facility location is the weighted median of the axis observations. In the first case, there is only one minimizer
, whereas the second case contains an infinite number of minimizers between
and
. Suppose that we choose only one minimizer among
,
, (
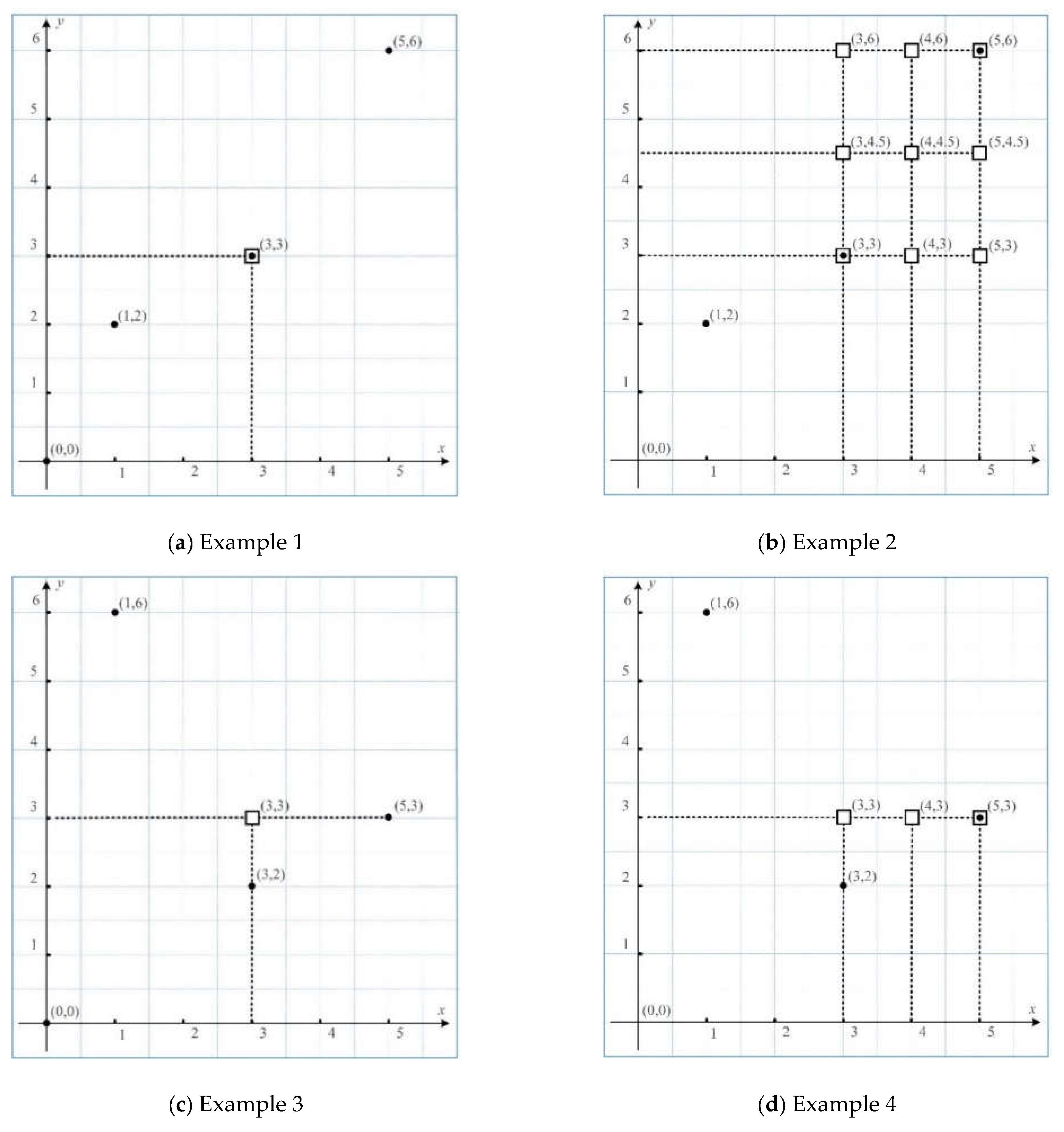
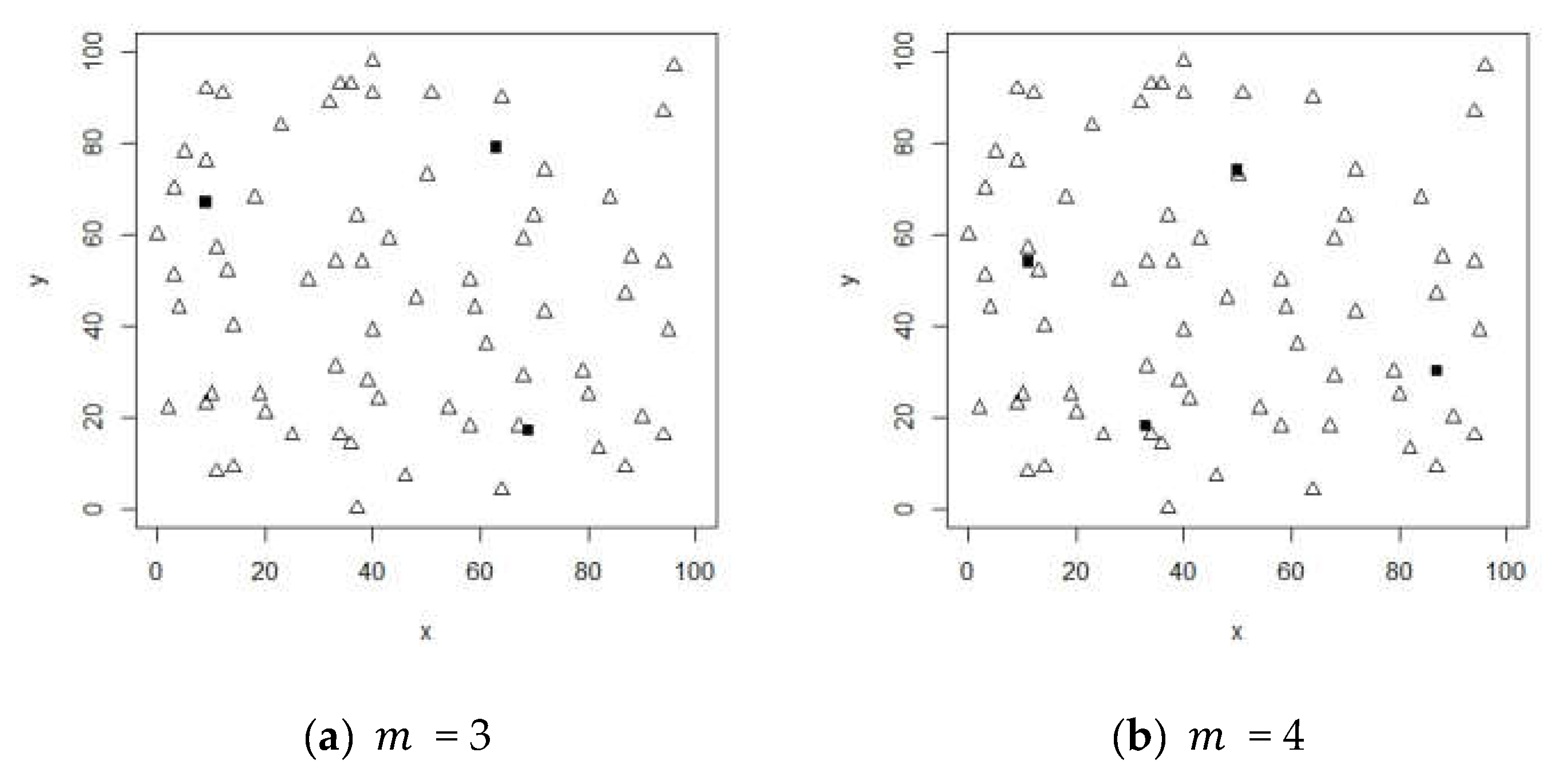
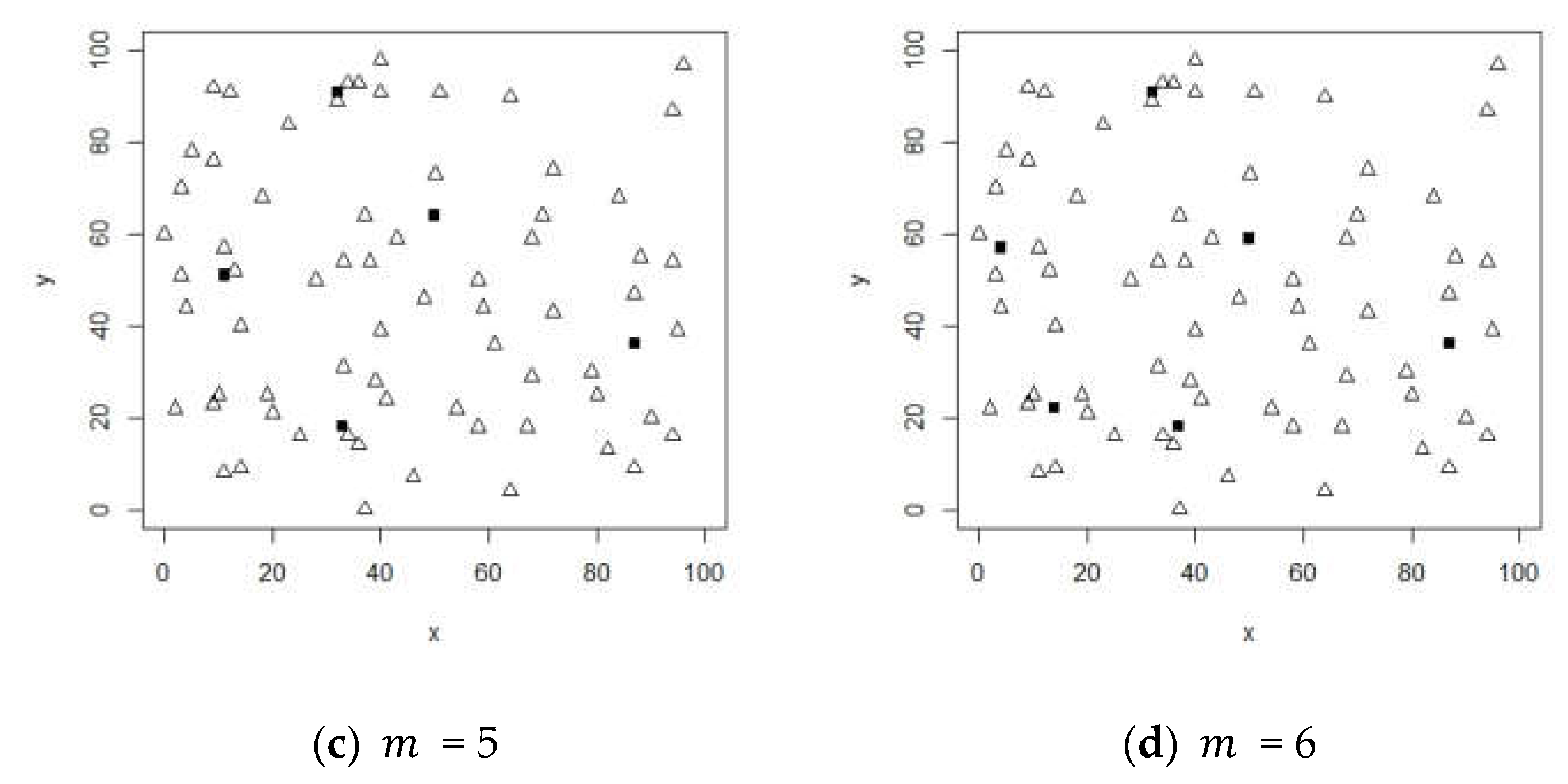
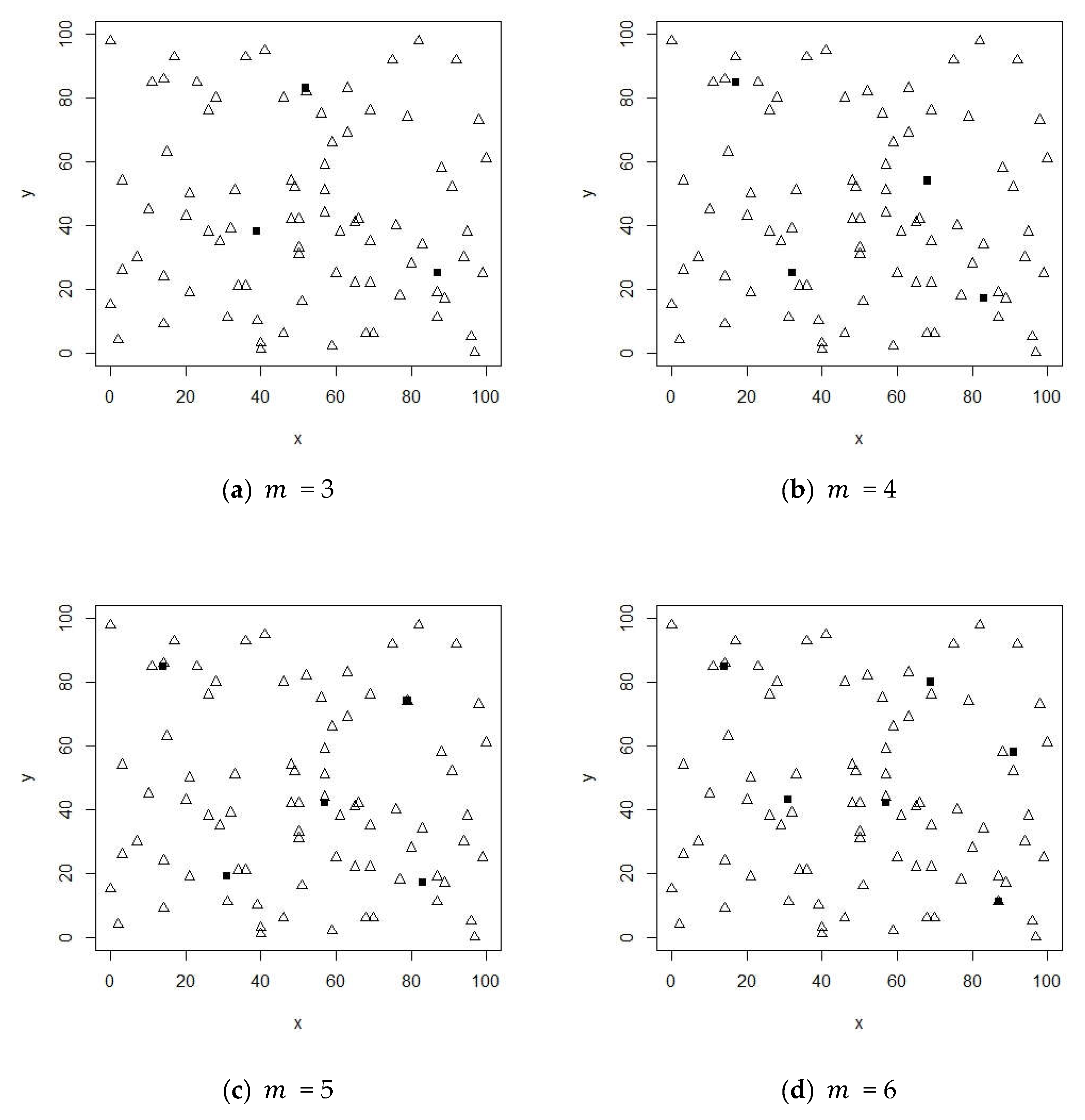
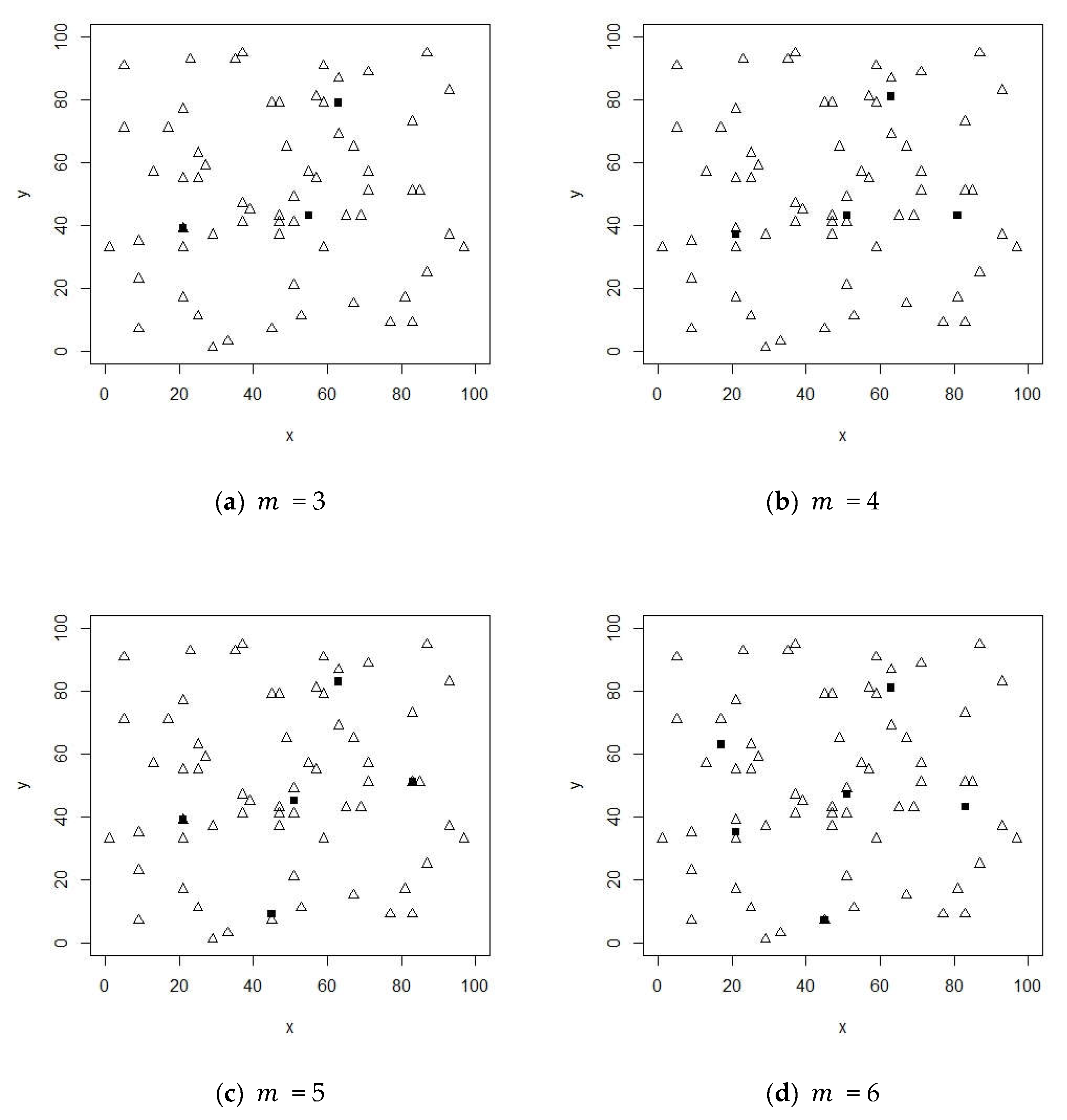
)/2 for the second case, we can construct the candidate facility locations. To better observe the characteristic of the optimal single-facility location, we use four examples (i.e., Examples 1–4) to illustrate the property of the optimal facility location, and the datasets are provided in
Table 2.
3.3.1. Example 1
As shown in
Figure 1, the black circles stand for the demand points and black hollow squares represent the optimal facility locations. In Example 1 (see
Figure 1a), the optimal facility location is located at the second demand point due to its coordinate values and weights, which are given by
3.3.2. Example 2
There are four optimal facility locations (black hollow squares) in Example 2 (see
Figure 1b) because of weight construction. Then, the weighted medians are given by
It is easy to obtain the optimal facility locations through permutation and combination of the weighted medians on different axes, which are (3, 3), (3, 6), (3, 4.5), (5, 3), (5, 6), (5, 4.5), (4, 3), (4, 6), and (4, 4.5). It is obvious that two of them, i.e., (3, 3) and (5, 6), are located at the demand points, but the others are not. As they have the same objective function value, any one among them can be considered as the location for the facility.
3.3.3. Example 3
As shown in
Figure 1c, there is only one specific location for the facility due to the singular weighted median on each of the axis. The optimal facility location does not locate at the demand point, which is given by
3.3.4. Example 4
In this case, the weighted median on the axes are given by
Thus, there are three black hollow squares in
Figure 1d, where any of them can be considered as the optimal location for the facility.
As presented in
Figure 1 for Examples 1–4, we can conclude that the globally optimal facility location is based on the coordinate values of the observations on different axes. After constructing the set of mesh points that are consist of the coordinate combinations, it is obvious that the optimal single-facility location is an element from the set of mesh points. Then, we have the following formula
Similarly, if we choose only one minimizer among
and
for the second case in (39), the optimal single-facility location is also an element from the other set of mesh points, which is given by
Note that the number of candidate locations in (34) is smaller than that in (33) but the objective function obtained through (34) is the same as that through (33). In this sense, the number of candidate locations in (34) is suggested in this study.
3.4. Identification of the Candidate Locations
As presented in (33), the globally optimal single-facility location is an element from the set of mesh points. Then, we investigate the candidate locations for the multi-facility location problem. In the multi-facility location problem, each demand point is assigned to its closest facility. Suppose that we have obtained the optimal facility locations, then the set of demand points served by the same facility is considered as a group, which is independent of other groups. In this sense, the optimal facility location is still one of the mesh points within this group. After considering the optimal facility locations for all groups, these optimal facility locations are from the mesh points that are constructed based on the observation coordinates. Then, we have
where
is the number of facilities, which is indexed by
.
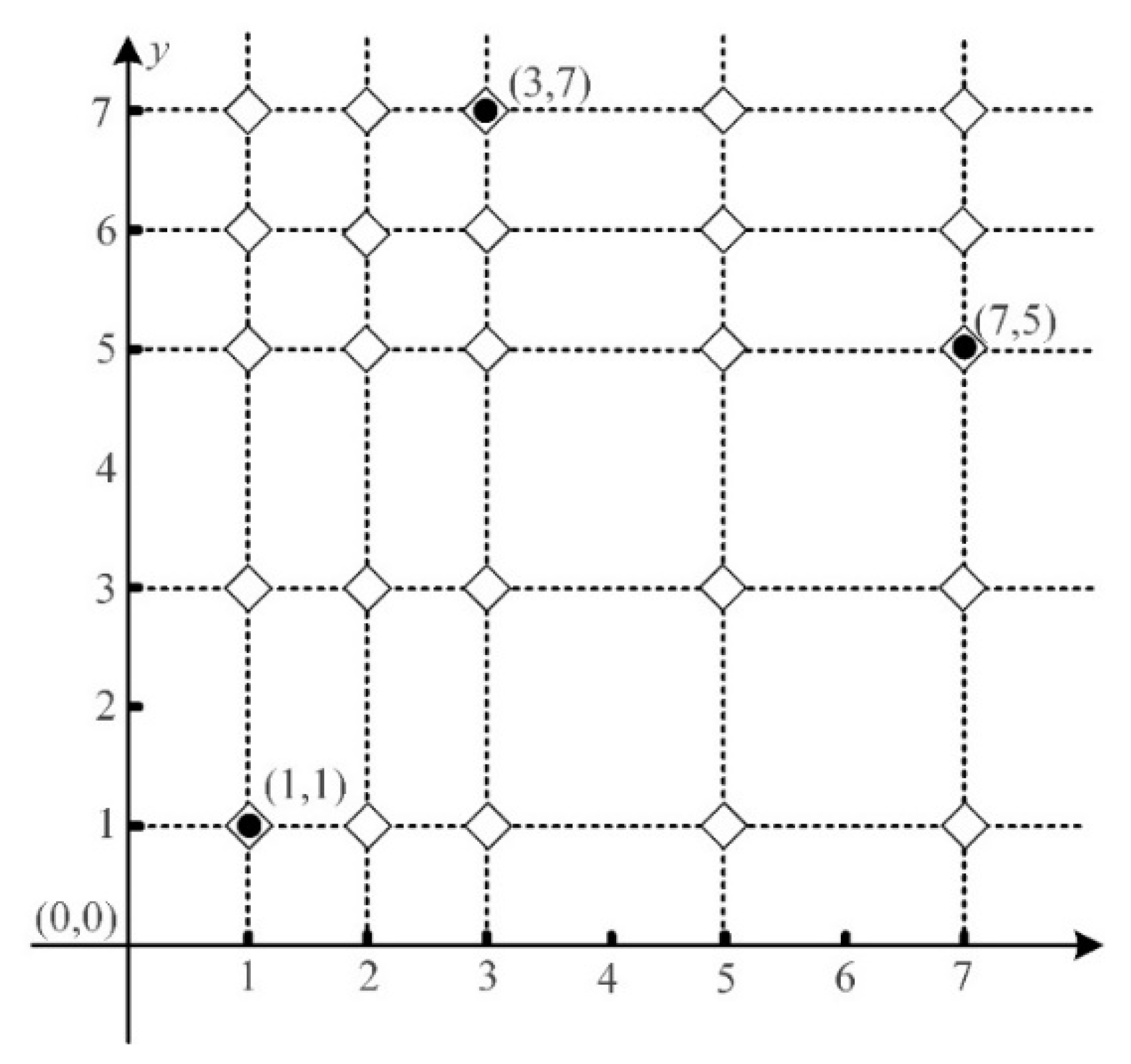
As an illustration, we provide an example to show the candidate locations (i.e., mesh points) for the facilities. In the example, we consider three demand points (see
Table 3). As shown in
Figure 2, we construct the mesh points based on these three demand-point coordinates. Accordingly, 25 mesh points are represented by black hollow rhombuses that also contain three demand points. These 25 mesh points are considered as the candidate facility locations. It is easy to conclude that the number of candidate facilities
is related to the number of demand points
, where the relationship between them is given by
When the demand points have the same coordinate value on one axis, the number of candidate facilities
can be smaller. Suppose that there are
(
) different
-axis values and
(
) different
-axis values, the number of candidate facilities
can be smaller, which is given by
Based on the conclusion about the number of the candidate locations for the two-dimensional multi-facility location problem, it is easy to deduce the number of candidate locations for the three-dimensional multi-facility location problem, which is given by
If we consider the minimizer from
and
for the second case presented in (39), the number of mesh points can be reduced and the number of candidate facilities
for the two- and three-dimensional multi-facility location problems are given below
Finally, we construct the candidate facility locations and transfer the continuous-space multi-facility location problem to the discrete-space multi-facility location problem. Next, our goal is to select the optimal locations from the mesh points, which is the global optimum solution to the problem.
3.5. Determination of the Globally Optimal Facility Locations
After the construction of the candidate locations for the facilities, what we need to do is to select the optimal facility locations from the mesh points. We formulate the mathematical model for the multi-facility location problem, which is also called the location-allocation problem. Besides, the construction of the candidate locations for the facilities makes it possible to determine the globally optimal locations for the capacitated facilities. Then, we present the different models for different facility location problems.
3.5.1. Model for the Uncapacitated Multi-Facility Problem
With the number of demand points
, we have
candidate facility locations. Let
be the set of demand points, which is indexed by
with
. Let
be the set of candidate facility locations, which is indexed by
with
. Then, the distance from the candidate facility location
to the demand point
is known, which is denoted by
. Given the number of facilities
, our goal is to select
locations among
candidate facility locations and allocate the demand points to these facilities to minimize the total cost. To formulate this problem, we need to define two more decision variables, which are given by
Then, we have the following mathematical model for the general multi-facility location-allocation problem:
The objective function in (41) minimizes the total weighted travel cost. Constraint in (42) means that we must locate exactly facilities. Constraint (43) states that a demand point can only be serviced by one facility. Constraint (44) indicates that the demand point can only be assigned to the opened facility.
3.5.2. Model for the Uncapacitated Multi-Facility Problem with Fixed Cost
In the above mathematical model, the fixed cost of opening a facility is not considered. However, in practice, the fixed cost of opening a facility is inevitable. Thus, the fixed cost, denoted by , needs to be considered in the multi-facility location-allocation problem. In this sense, the number of facilities is also a decision variable. Then, the mathematical model is given by
The objective function in (45) minimizes the total cost including the weighted travel cost and fixed cost. The first constraint in (46) means that the number of facilities cannot be more than . Constraints (47) and (48) are the same as the Constraints (43) and (44).
3.5.3. Model for the Capacitated Multi-Facility Problem with Fixed Cost
Generally, the clustering-based method is applied to solve the uncapacitated continuous-space multi-facility location problem. Even though some studies have applied the adjusted clustering-based algorithms to solve the capacitated multi-facility problem [
30,
31], it is still impossible to guarantee the global optimum of the solution. In this sense, obtaining the globally optimal locations for the facilities is warranted when the practical factor of the limited capacities is considered. Based on the constructed candidate locations for the facilities, the globally optimal locations for the capacitated facilities also can be selected from the mesh points. Let
be the quantity of demand at demand point
and
be the capacity of the facility
. Note that
can be considered as the weight of demand point
. Then, the capacitated continuous-space multi-facility problem can be formulated as the following mathematical model
.
The objective function in (49) minimizes the total cost including the travel cost and fixed cost. The first constraint in (50) guarantees the maximum number of facilities. Constraints (51) and (52) are the same as the Constraints (43) and (44). Constraint (53) restricts the facility capacity.



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}