
Modeling a Pre-Touch Reaction Distance around Socially Touchable Upper Body Parts of a Robot



Abstract
:Featured Application
Abstract
1. Introduction
2. Related Work
2.1. Touch in Human–Robot Interaction
2.2. Proxemics in Human–Robot Interaction
3. Materials and Methods
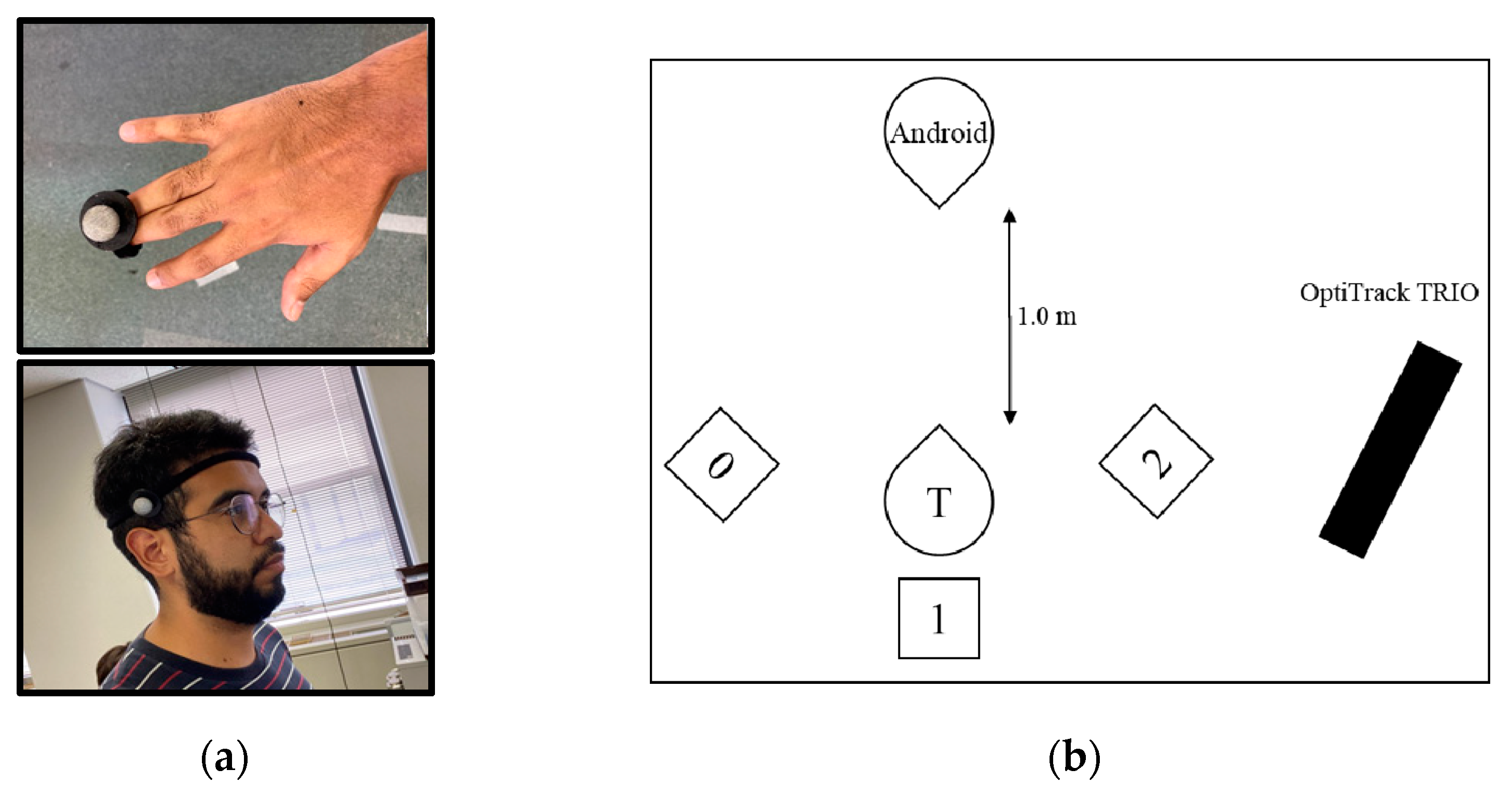
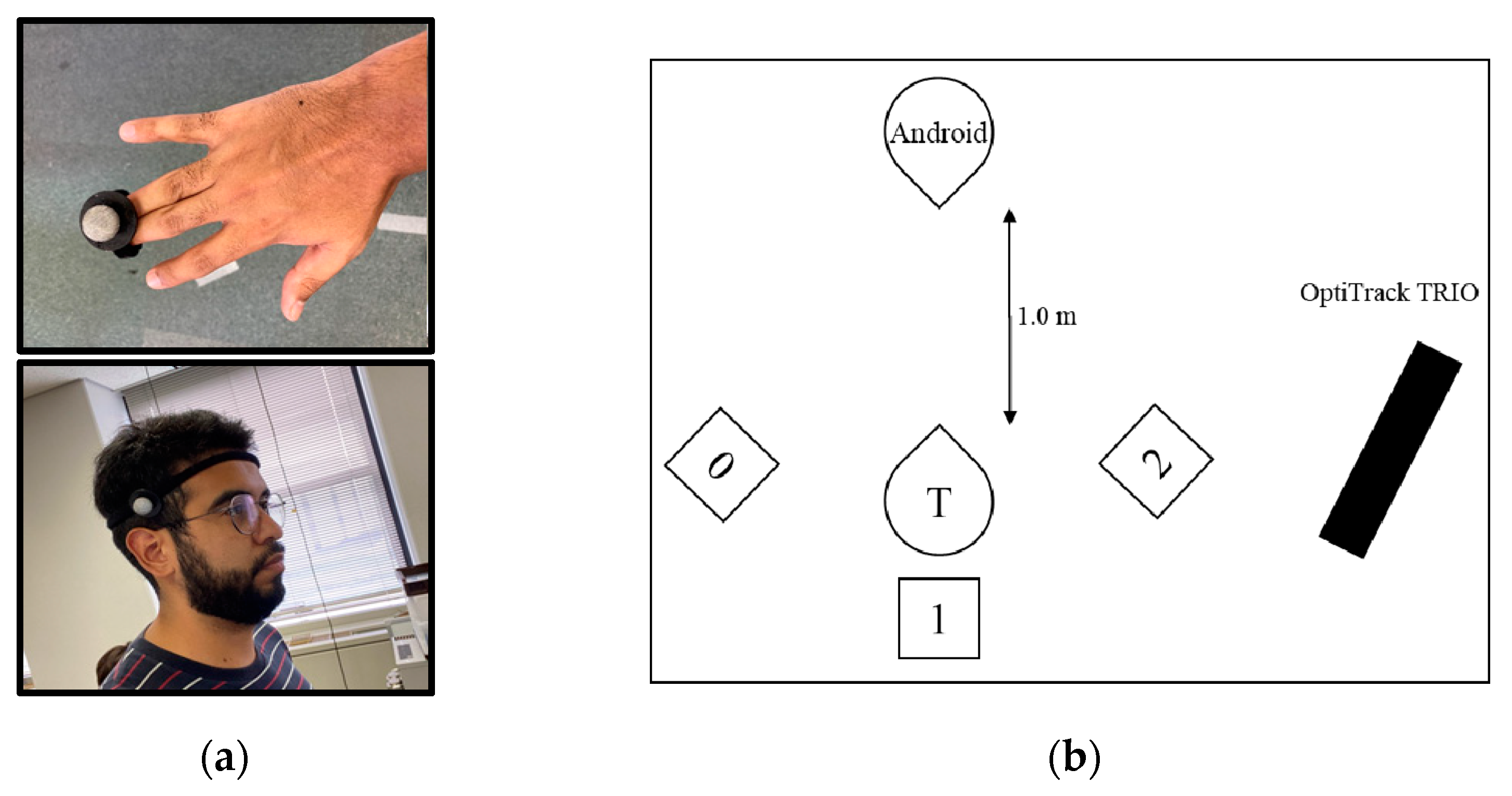
3.1. Data Collection
3.1.1. Overview
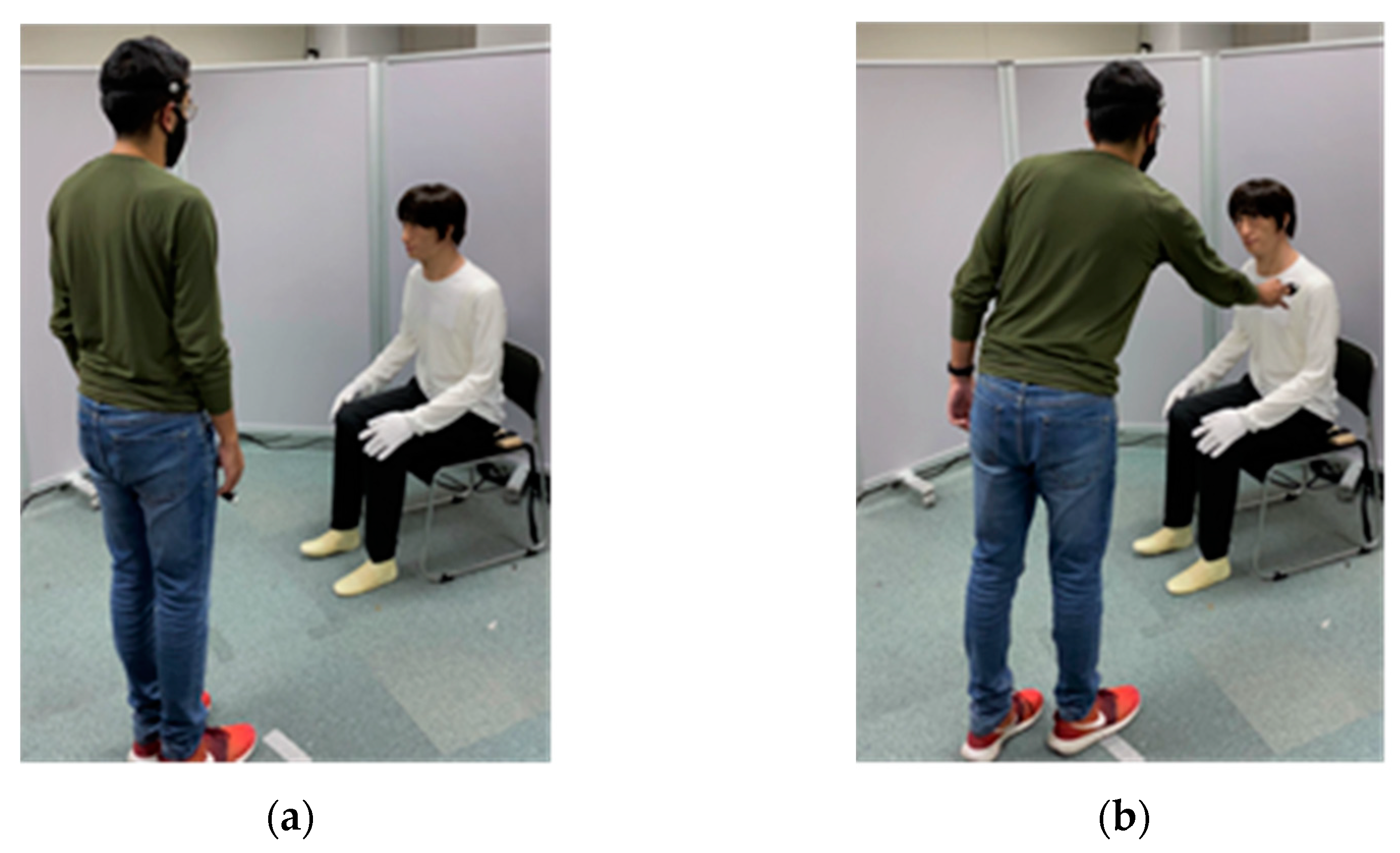
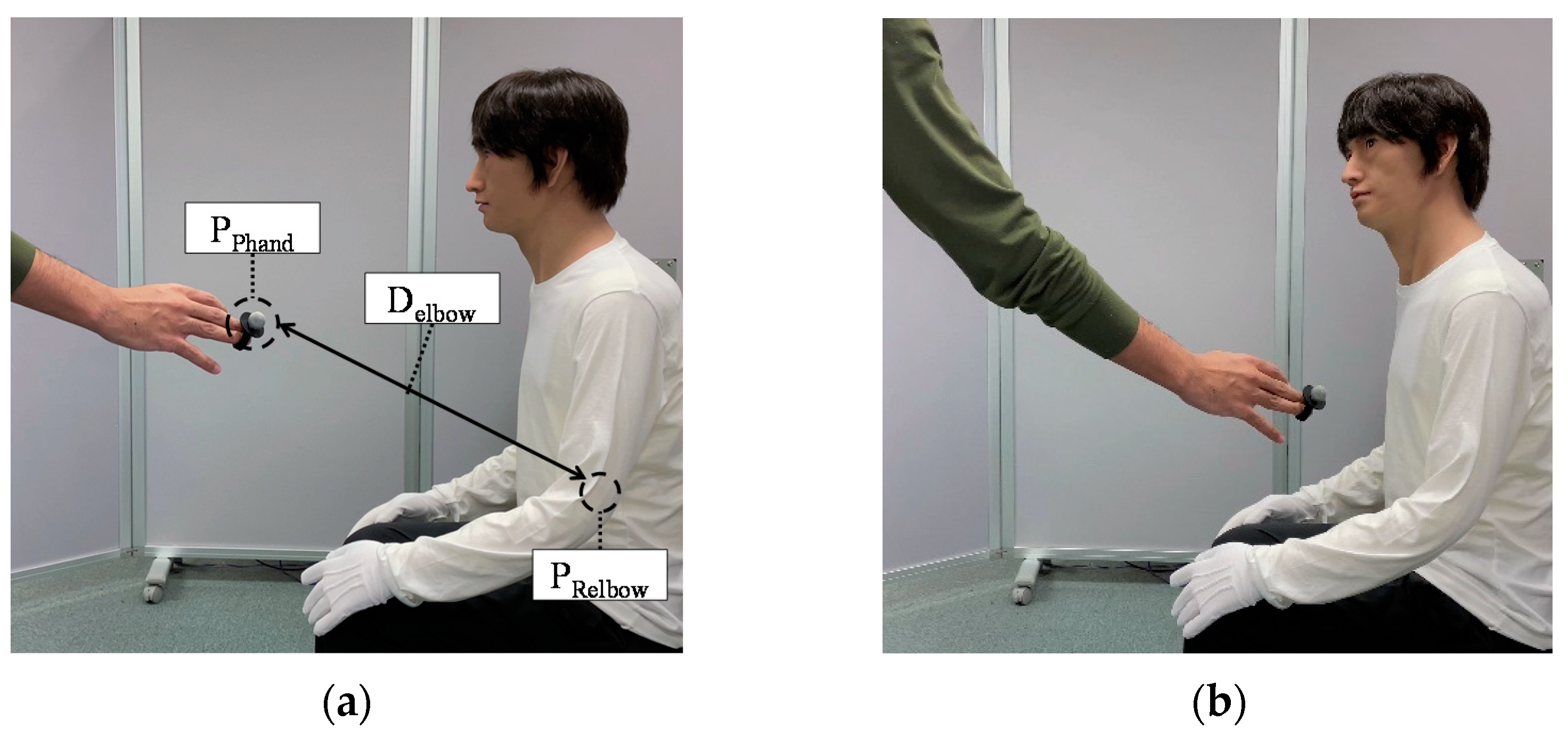
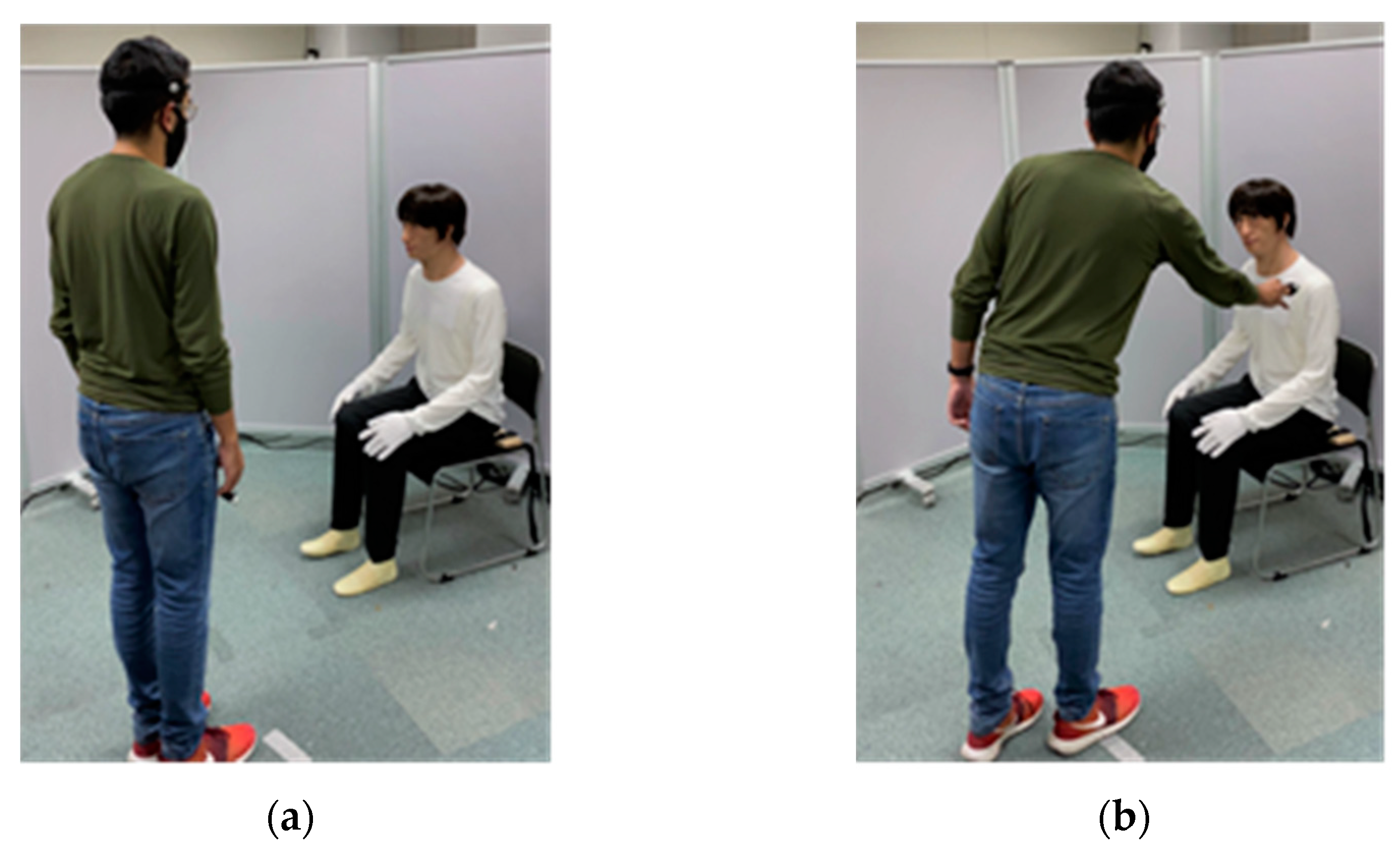
3.1.2. Procedure
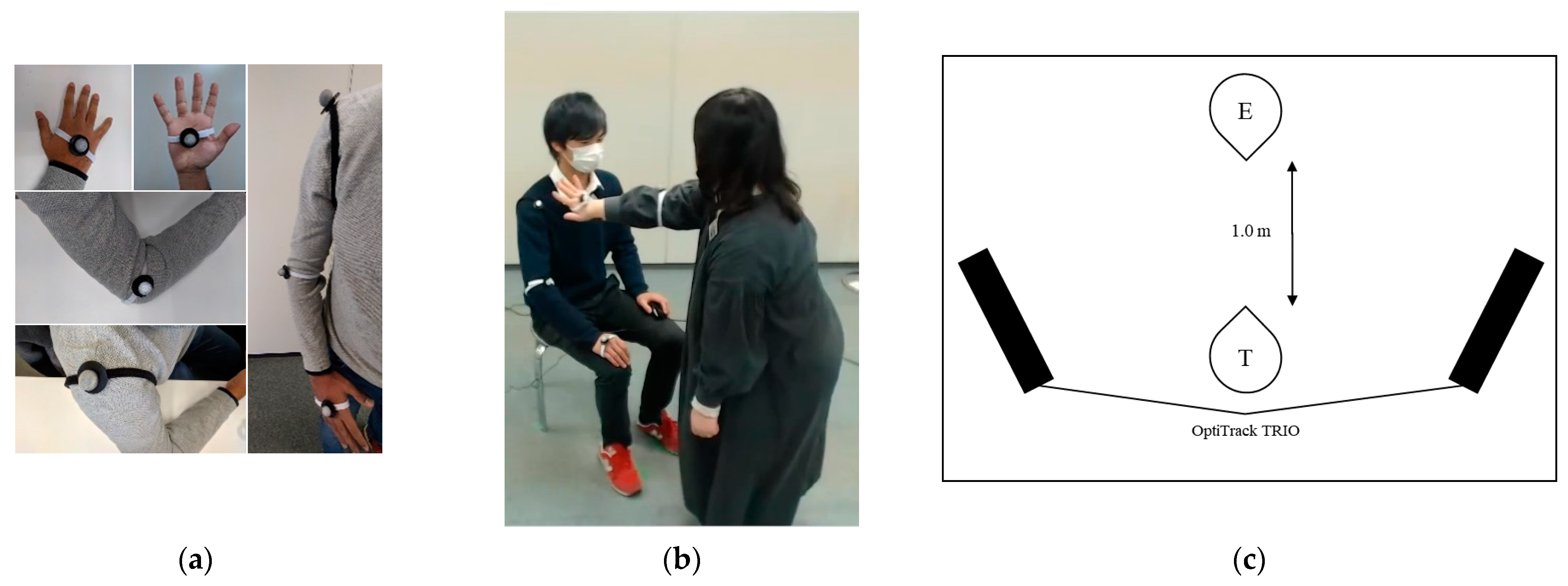
3.1.3. Recording Data
3.1.4. Participants
3.1.5. Hypotheses and Predictions
4. Results and Implementation
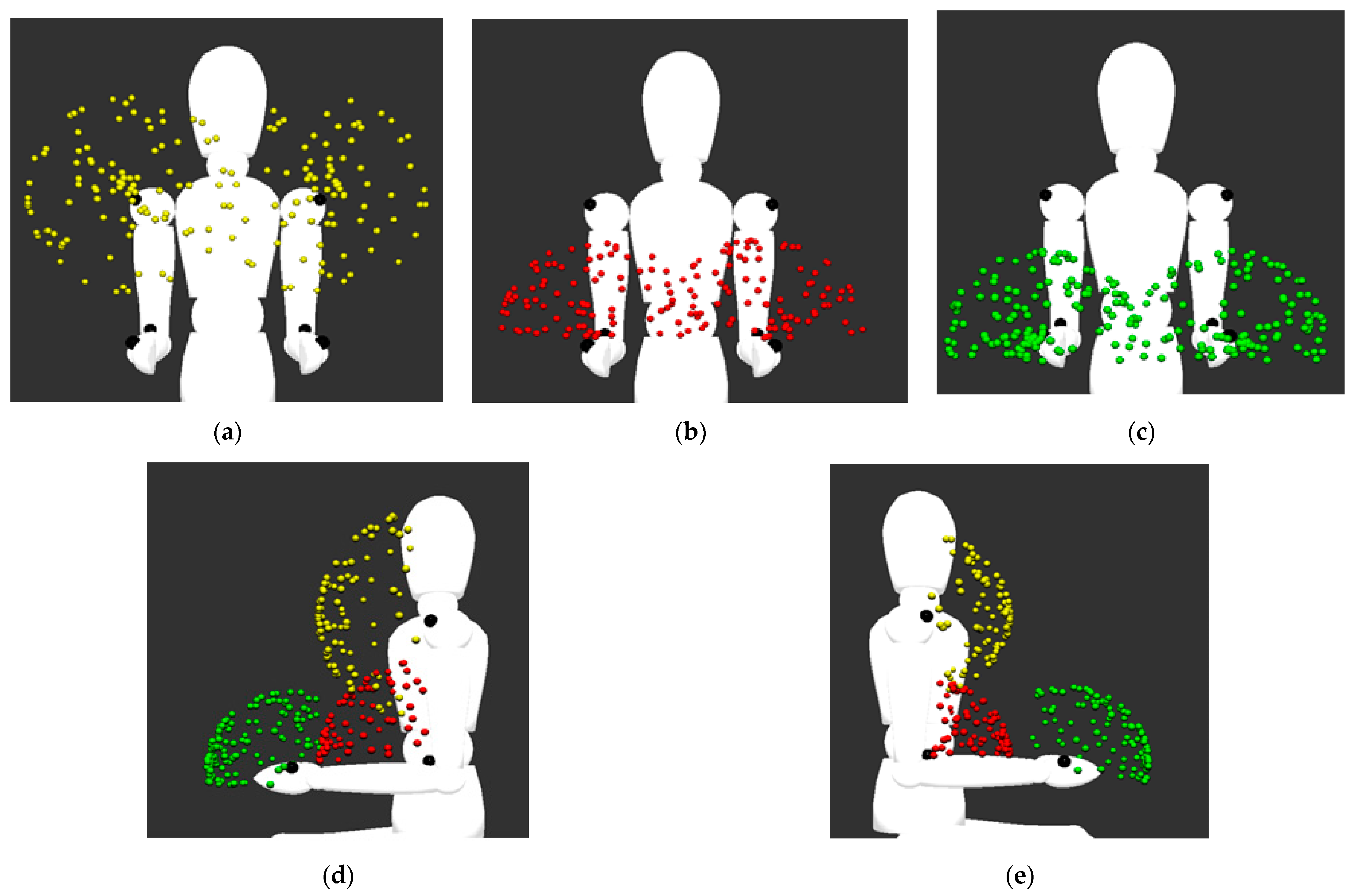
4.1. Data Analysis Results
4.1.1. Parts, Angle, and Gender Combination Effects
4.1.2. Additional Analysis: Speed Effect
4.1.3. Additional Analysis: Acclimation Effect
4.1.4. Summary
4.2. Implementation
5. Discussion
5.1. Implications
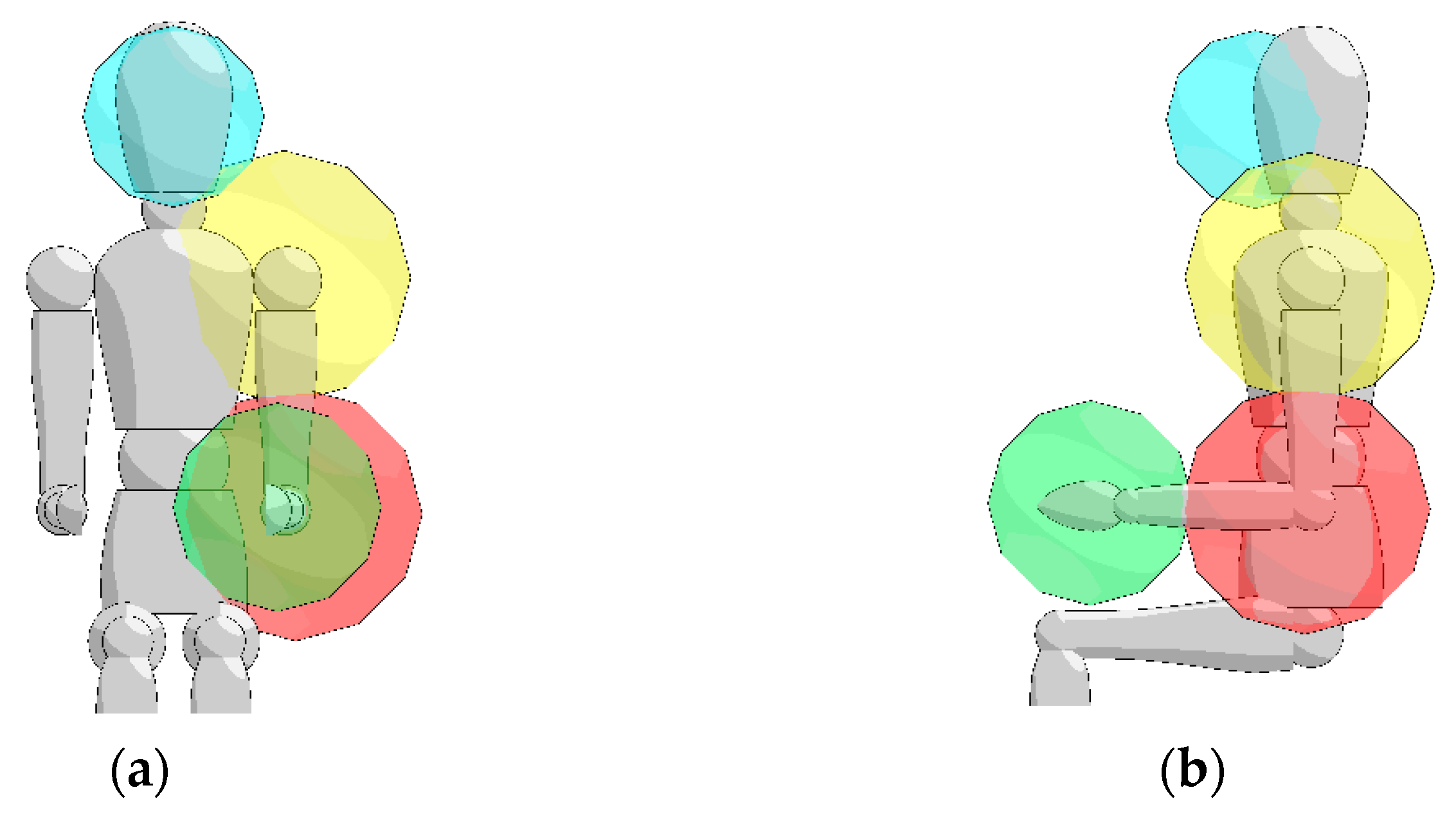
5.2. Implementation of Whole-Upper-Body Pre-Touch Reaction Distance
5.3. Limitations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grewen, K.M.; Anderson, B.J.; Girdler, S.S.; Light, K.C. Warm Partner Contact Is Related to Lower Cardiovascular Reactivity. Behav. Med. 2003, 29, 123–130. [Google Scholar] [CrossRef]
- Cohen, S.; Janicki-Deverts, D.; Turner, R.B.; Doyle, W.J. Data from: Does hugging provide stress-buffering social support? A study of susceptibility to upper respiratory infection and illness. Psychol. Sci. 2015, 26, 135–147. [Google Scholar] [CrossRef] [Green Version]
- Jakubiak, B.K.; Feeney, B.C. Keep in touch: The effects of imagined touch support on stress and exploration. J. Exp. Soc. Psychol. 2016, 65, 59–67. [Google Scholar] [CrossRef]
- Gallace, A.; Spence, C. The science of interpersonal touch: An overview. Neurosci. Biobehav. Rev. 2010, 34, 246–259. [Google Scholar] [CrossRef] [PubMed]
- Light, K.C.; Grewen, K.M.; Amico, J.A. More frequent partner hugs and higher oxytocin levels are linked to lower blood pressure and heart rate in premenopausal women. Biol. Psychol. 2005, 69, 5–21. [Google Scholar] [CrossRef] [PubMed]
- Field, T. Touch for socioemotional and physical well-being: A review. Dev. Rev. 2010, 30, 367–383. [Google Scholar] [CrossRef]
- Yu, R.; Hui, E.; Lee, J.; Poon, D.; Ng, A.; Sit, K.; Ip, K.; Yeung, F.; Wong, M.; Shibata, T.; et al. Use of a Therapeutic, Socially Assistive Pet Robot (PARO) in Improving Mood and Stimulating Social Interaction and Communication for People with Dementia: Study Protocol for a Randomized Controlled Trial. JMIR Res. Protoc. 2015, 4, e45. [Google Scholar] [CrossRef] [PubMed]
- Sumioka, H.; Nakae, A.; Kanai, R.; Ishiguro, H. Huggable communication medium decreases cortisol levels. Sci. Rep. 2013, 3, 3034. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shiomi, M.; Nakagawa, K.; Shinozawa, K.; Matsumura, R.; Ishiguro, H.; Hagita, N. Does A Robot’s Touch Encourage Human Effort? Int. J. Soc. Robot. 2016, 9, 5–15. [Google Scholar] [CrossRef]
- Shiomi, M.; Nakata, A.; Kanbara, M.; Hagita, N. A hug from a robot encourages prosocial behavior. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 418–423. [Google Scholar] [CrossRef]
- Bevan, C.; Fraser, D.S. Shaking Hands and Cooperation in Tele-present Human-Robot Negotiation. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 247–254. [Google Scholar]
- Shiomi, M.; Nakata, A.; Kanbara, M.; Hagita, N. A Robot that Encourages Self-disclosure by Hug. In Proceedings of the Social Robotics: 9th International Conference, ICSR 2017, Tsukuba, Japan, 22–24 November 2017; Kheddar, A., Yoshida, E., Ge, S.S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 324–333. [Google Scholar]
- Shiomi, M.; Hagita, N. Do Audio-Visual Stimuli Change Hug Impressions? In Proceedings of the Social Robotics: 9th International Conference, ICSR 2017, Tsukuba, Japan, 22–24 November 2017; Kheddar, A., Yoshida, E., Ge, S.S., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 345–354. [Google Scholar]
- Chen, T.L.; King, C.-H.A.; Thomaz, A.L.; Kemp, C.C. An Investigation of Responses to Robot-Initiated Touch in a Nursing Context. Int. J. Soc. Robot. 2014, 6, 141–161. [Google Scholar] [CrossRef] [Green Version]
- Fukuda, H.; Shiomi, M.; Nakagawa, K.; Ueda, K. ‘Midas touch’ in human-robot interaction: Evidence from event-related potentials during the ultimatum game. In Proceedings of the 2012 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Boston, MA, USA, 5–8 March 2012; pp. 131–132. [Google Scholar]
- Shiomi, M.; Shatani, K.; Minato, T.; Ishiguro, H. How should a Robot React before People’s Touch?: Modeling a Pre-Touch Reaction Distance for a Robot’s Face. IEEE Robot. Autom. Lett. 2018, 3, 3773–3780. [Google Scholar] [CrossRef]
- Sato, A.; Kimoto, M.; Iio, T.; Shimohara, K.; Shiomi, M. Preliminary Investigation of Pre-Touch Reaction Distances toward Virtual Agents. In Proceedings of the 7th International Conference on Human-Agent Interaction, Kyoto, Japan, 6–10 October 2019; Association for Computing Machinery (ACM): New York, NY, USA, 2019; pp. 292–293. [Google Scholar]
- Suvilehto, J.T.; Glerean, E.; Dunbar, R.I.M.; Hari, R.; Nummenmaa, L. Topography of social touching depends on emotional bonds between humans. Proc. Natl. Acad. Sci. USA 2015, 112, 13811–13816. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hall, E.T. The Hidden Dimension; Doubleday: Garden City, NY, USA, 1966. [Google Scholar]
- Kirby, R.; Simmons, R.; Forlizzi, J. COMPANION: A Constraint-Optimizing Method for Person-Acceptable Navigation. In Proceedings of the RO-MAN 2009—The 18th IEEE International Symposium on Robot and Human Interactive Communication, Toyama, Japan, 27 September–2 October 2009; pp. 607–612. [Google Scholar]
- Luber, M.; Spinello, L.; Silva, J.; Arras, K.O. Socially-aware robot navigation: A learning approach. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 902–907. [Google Scholar]
- Svenstrup, M.; Bak, T.; Andersen, H.J. Trajectory planning for robots in dynamic human environments. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4293–4298. [Google Scholar]
- Gómez, J.V.; Mavridis, N.; Garrido, S. Social path planning: Generic human-robot interaction framework for robotic navigation tasks. In Proceedings of the 2nd International Workshop on Cognitive Robotics Systems: Replicating Human Actions and Activities, Tokyo, Japan, 3 November 2013. [Google Scholar]
- Satake, S.; Kanda, T.; Glas, D.F.; Imai, M.; Ishiguro, H.; Hagita, N. A Robot that Approaches Pedestrians. IEEE Trans. Robot. 2012, 29, 508–524. [Google Scholar] [CrossRef]
- Huang, C.-M.; Iio, T.; Satake, S.; Kanda, T. Modeling and Controlling Friendliness for An Interactive Museum Robot. In Proceedings of the Robotics: Science and Systems X, Berkely, CA, USA, 12–16 July 2014; Robotics: Science and Systems Foundation, University of California: Berkely, CA, USA, 2014. [Google Scholar]
- Takayama, L.; Pantofaru, C. Influences on proxemic behaviors in human-robot interaction. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hyatt Regency, St. Louis, MO, USA, 11–15 October 2009. [Google Scholar]
- Mumm, J.; Mutlu, B. Human-robot proxemics: Physical and psychological distancing in human-robot interaction. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 6–9 March 2011; pp. 331–338. [Google Scholar]
- Rossi, S.; Staffa, M.; Bove, L.; Capasso, R.; Ercolano, G. User’s Personality and Activity Influence on HRI Comfortable Distances. In Proceedings of the Transactions on Petri Nets and Other Models of Concurrency XV; Springer Science and Business Media LLC: Berlin, Germany, 2017; pp. 167–177. [Google Scholar]
- Hiroi, Y.; Ito, A. Influence of the Size Factor of a Mobile Robot Moving toward a Human on Subjective Acceptable Distance. In Mobile Robots—Current Trends; Zoran Gacovski, Z., Ed.; InTechOpen Europe: Rikeja, Croatia, 2011. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Kwak, S.S.; Kim, M.-S. Am I acceptable to you? Effect of a robot’s verbal language forms on people’s social distance from robots. Comput. Hum. Behav. 2013, 29, 1091–1101. [Google Scholar] [CrossRef]
- Obaid, M.; Sandoval, E.B.; Złotowski, J.; Moltchanova, E.; Basedow, C.A.; Bartneck, C. Stop! That is close enough. How body postures influence human-robot proximity. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 354–361. [Google Scholar]
- Abe, K.; Hamada, Y.; Nagai, T.; Shiomi, M.; Omori, T. Estimation of child personality for child-robot interaction. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28–31 August 2017; pp. 910–915. [Google Scholar] [CrossRef]
- Anzalone, S.M.; Varni, G.; Ivaldi, S.; Chetouani, M. Automated Prediction of Extraversion During Human–Humanoid Interaction. Int. J. Soc. Robot. 2017, 9, 385–399. [Google Scholar] [CrossRef]
- Shiomi, M.; Hagita, N. Audio-Visual Stimuli Change Not Only Robot’s Hug Impressions but Also Its Stress-Buffering Effects. Int. J. Soc. Robot. 2021, 13, 469–476. [Google Scholar] [CrossRef]
- Chen, T.L.; Bhattacharjee, T.; Beer, J.; Ting, L.H.; Hackney, M.E.; Rogers, W.A.; Kemp, C.C. Older adults’ acceptance of a robot for partner dance-based exercise. PLoS ONE 2017, 12, e0182736. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, T.L.; Bhattacharjee, T.; McKay, J.L.; Borinski, J.E.; Hackney, M.E.; Ting, L.H.; Kemp, C.C. Evaluation by Expert Dancers of a Robot That Performs Partnered Stepping via Haptic Interaction. PLoS ONE 2015, 10, e0125179. [Google Scholar] [CrossRef] [Green Version]
- Kosuge, K.; Hayashi, T.; Hirata, Y.; Tobiyama, R. Dance partner robot-ms dancer. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 3459–3464. [Google Scholar]
- Hirano, T.; Shiomi, M.; Iio, T.; Kimoto, M.; Tanev, I.; Shimohara, K.; Hagita, N. How Do Communication Cues Change Impressions of Human–Robot Touch Interaction? Int. J. Soc. Robot. 2017, 10, 21–31. [Google Scholar] [CrossRef]
- Suvilehto, J.T.; Nummenmaa, L.; Harada, T.; Dunbar, R.I.M.; Hari, R.; Turner, R.; Sadato, N.; Kitada, R. Cross-cultural similarity in relationship-specific social touching. Proc. R. Soc. B Boil. Sci. 2019, 286, 20190467. [Google Scholar] [CrossRef]
- Hertenstein, M.J.; Keltner, D.; App, B.; Bulleit, B.A.; Jaskolka, A.R. Touch communicates distinct emotions. Emotion 2006, 6, 528–533. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alenljung, B.; Andreasson, R.; Lowe, R.; Billing, E.; Lindblom, J. Conveying Emotions by Touch to the Nao Robot: A User Experience Perspective. Multimod. Technol. Interact. 2018, 2, 82. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X.; Shiomi, M.; Minato, T.; Ishiguro, H. What Kinds of Robot’s Touch Will Match Expressed Emotions? IEEE Robot. Autom. Lett. 2019, 5, 127–134. [Google Scholar] [CrossRef]
- Prasad, V.; Stock-Homburg, R.; Peters, J. Human-Robot Handshaking: A Review. Int. J. Soc. Robot. 2021, 1–17. [Google Scholar] [CrossRef]
- Stock-Homburg, R.; Peters, J.; Schneider, K.; Prasad, V.; Nukovic, L.; Darmstadt, D.R.S.-H.T.U. Evaluation of the Handshake Turing Test for anthropomorphic Robots. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020. [Google Scholar]
- Lehmann, H.; Rojik, A.; Hoffmann, M. Should a small robot have a small personal space? Investigating personal spatial zones and proxemic behavior in human-robot interaction. In Proceedings of the CognitIve RobotiCs for intEraction (CIRCE) Workshop at IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020. [Google Scholar]
- Li, R.; Van Almkerk, M.; Van Waveren, S.; Carter, E.J.; Leite, I. Comparing Human-Robot Proxemics Between Virtual Reality and the Real World. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Korea, 11–14 March 2019; pp. 431–439. [Google Scholar]
- Amaoka, T.; Laga, H.; Saito, S.; Nakajima, M. Personal Space Modeling for Human-Computer Interaction. In Proceedings of the Transactions on Petri Nets and Other Models of Concurrency XV; Springer Science and Business Media LLC: Berlin, Germany, 2009; pp. 60–72. [Google Scholar]
- Svenstrup, M.; Tranberg, S.; Andersen, H.J.; Bak, T. Pose estimation and adaptive robot behaviour for human-robot interaction. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3571–3576. [Google Scholar]
- Shiomi, M.; Sumioka, H.; Sakai, K.; Funayama, T.; Minato, T. SŌTO: An Android Platform with a Masculine Appearance for Social Touch Interaction. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 447–449. [Google Scholar]
- Baldassare, M.; Feller, S. Cultural Variations in Personal Space: Theory, Methods, and Evidence. Ethos 1975, 3, 481–503. [Google Scholar] [CrossRef]
- Heshka, S.; Nelson, Y. Interpersonal speaking distance as a function of age, sex, and relationship. Sociometry 1972, 35, 491–498. [Google Scholar] [CrossRef]
- Knapp, M.L.; Hall, J.A.; Horgan, T.G. Nonverbal Communication in Human Interaction; Cengage Learning: Boston, MA, USA, 2013. [Google Scholar]
- McDaniel, E.; Andersen, P.A. International Patterns of Interpersonal Tactile Communication: A Field Study. J. Nonverbal Behav. 1998, 22, 59–75. [Google Scholar] [CrossRef]
- DiBiase, R.; Gunnoe, J. Gender and Culture Differences in Touching Behavior. J. Soc. Psychol. 2004, 144, 49–62. [Google Scholar] [CrossRef]
- Hall, J.A. Touch, status, and gender at professional meetings. J. Nonverbal Behav. 1996, 20, 23–44. [Google Scholar] [CrossRef]
- Willis, F.N.; Briggs, L.F. Relationship and touch in public settings. J. Nonverbal Behav. 1992, 16, 55–63. [Google Scholar] [CrossRef]
- Cuello Mejía, D.A.; Saito, A.; Kimoto, M.; Iio, T.; Shimohara, K.; Sumioka, H.; Ishiguro, H.; Shiomi, M. Modeling of Pre-Touch Reaction Distance for Faces in a Virtual Environment. J. Inf. Process. (JIP) 2021, 29. to be published. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gender Combination | ||
|---|---|---|
| Same | Different | |
| Shoulder | 23.4 (2.6) | 25.9 (2.6) |
| Elbow | 23.6 (2.5) | 24.1 (2.5) |
| Hand | 21.0 (2.3) | 21.3 (2.3) |
| Angle | ||
|---|---|---|
| Left | Right | |
| Shoulder | 25.7 (2.0) | 23.6 (1.8) |
| Elbow | 24.7 (2.1) | 23.0 (1,6) |
| Hand | 21.7 (1.8) | 20.6 (1.5) |
| Factor | p-Value | Factor | p-Value |
|---|---|---|---|
| Part (P) | <0.001 | P × A | 0.623 |
| Angle (A) | 0.083 | P × G | 0.200 |
| Gender combination (G) | 0.749 | A × G | 0.366 |
| P × A × G | 0.125 |
| Acclimation | ||
|---|---|---|
| First Half | Last Half | |
| Shoulder | 23.9 (1.7) | 25.0 (1.9) |
| Elbow | 22.9 (1.5) | 24.5 (1.8) |
| Hand | 20.8 (1.7) | 21.4 (1.6) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cuello Mejía, D.A.; Sumioka, H.; Ishiguro, H.; Shiomi, M. Modeling a Pre-Touch Reaction Distance around Socially Touchable Upper Body Parts of a Robot. Appl. Sci. 2021, 11, 7307. https://doi.org/10.3390/app11167307
Cuello Mejía DA, Sumioka H, Ishiguro H, Shiomi M. Modeling a Pre-Touch Reaction Distance around Socially Touchable Upper Body Parts of a Robot. Applied Sciences. 2021; 11(16):7307. https://doi.org/10.3390/app11167307
Chicago/Turabian StyleCuello Mejía, Dario Alfonso, Hidenobu Sumioka, Hiroshi Ishiguro, and Masahiro Shiomi. 2021. "Modeling a Pre-Touch Reaction Distance around Socially Touchable Upper Body Parts of a Robot" Applied Sciences 11, no. 16: 7307. https://doi.org/10.3390/app11167307
APA StyleCuello Mejía, D. A., Sumioka, H., Ishiguro, H., & Shiomi, M. (2021). Modeling a Pre-Touch Reaction Distance around Socially Touchable Upper Body Parts of a Robot. Applied Sciences, 11(16), 7307. https://doi.org/10.3390/app11167307