
Repositioning Bikes with Carrier Vehicles and Bike Trailers in Bike Sharing Systems

Abstract
1. Introduction
- We propose an optimization model to improve upon the prior literature by bringing in simultaneous use of both carrier vehicles and bike trailers in the context of dynamic repositioning. While dynamic repositioning has been considered for bike trailers and carrier vehicles separately, previous work has not been considered jointly.
- We propose a new profit objective function and additional constraints considering both carrier vehicles and bike trailers to reduce lost customer demand and increase overall profits. While profit objective function has been considered for reduce lost customer demand and increase overall profits separately, previous work has not been considered jointly.
- We design a clustering mechanism for computing main base stations to help improve the efficiency of optimization model with respect to large-scale problem with many stations.
2. Related Work
2.1. Static Repositioning Using Carrier Vehicles
2.2. Dynamic Repositioning Using Carrier Vehicles
2.3. Dynamic Repositioning Using Bike Trailers
3. Problem Formulation
- denotes the set of base stations.
- denotes the set of vehicles used for repositioning, which is restricted to carrier vehicles only.
- denotes samples of customer requests for the future time steps with indicating the number of customer requests between stations s and , which start at decision epoch t and end at decision epoch .
- denotes the capacity of stations with indicating capacity of station s.
- denotes the capacity of carrier vehicles or bike trailers with indicating capacity of vehicle v or bike trailer v.
- denotes the distribution of bikes at stations with indicating the number of bikes at station s at decision epoch t.
- denotes the distribution of bikes in vehicles with indicating the number of bikes in vehicle v at decision epoch t.
- denotes the distribution of carrier vehicles at stations, with set to be 1 if vehicle v is present at station s at decision epoch t and 0 otherwise.
- R denotes the revenue of bikes being hired, with indicating the revenue from station s to which starts at decision epoch t and ends at decision epoch .
- D denotes the actual distance with indicating the distance between stations s and .
- B denotes the total budget for all trailers to bid. In other words, the total amount of value spent on trailers should not be larger than B.
- denotes the value for executing the task of bike trailer with indicating the value for executing the task of bike trailer picking up idle bikes at station s and dropping off them at station .
- P denotes the routing value (e.g., fuel cost) for vehicles traveling with indicating the routing value for vehicles traveling from station s to , which depends on the distance between the two stations.
- We assumed that users who carry bikes and trailers at decision epoch t always return their bikes at the beginning of the decision epoch . The duration of each decision epoch was 30 min. We evaluated different duration impacts on runtime performance. We chose 30 min as the default setting for the duration of time step.
- We sampled the empirical distribution of the real historical data of customer requests to simulate customer requests for the future time steps. We produced three types of demand scenarios: (1) We took the real demand data for 60 weekdays. We used 20 days of demand scenarios for training purpose and other 40 days of demand for testing. (2) We generated 100 demand scenarios, where the arrival demand at each station is generated using Poisson distribution with the mean computed from historical data. Similar to Shu et al. [6], we assume that customers reach their destination station with a fixed probability. (3) We generated 100 demand scenarios, where demand for each origin destination [OD] pair at each time step is computed using Poisson distribution. For the demand scenario types 2 and 3, we used 30 demand scenarios for training and 70 demand scenarios for testing [9]. We assumed that the numbers of extra bikes is the lost demand at the time of return. To ensure that the capacity constraints were considered for the stations, we transferred extra bikes to the nearest available station if the number of bikes exceeds the station capacity. Once the distribution of bikes across the stations for time step was obtained, we utilized this information to compute the repositioning strategy for trailers and vehicles for time step . This iterative process continued until we reached the last decision epoch.
- Customers can rent a bike for 30 min or more, and they have to know in advance at which station they will return the bike. On the other hand, they return their bikes to the nearest available station if the destination station is full, and they leave the system if they encounter an empty station.
- denotes the number of bikes picked up from station s by vehicle v at decision epoch t.
- denotes the number of bikes dropped at station s by vehicle v at decision epoch t.
- denotes whether vehicle v picks up bikes from station s at decision epoch t and drops off at station at decision epoch .
- denotes the number of bikes picked up from station s by bike trailer v at decision epoch t.
- denotes the number of bikes dropped off at station s by bike trailer v at decision epoch t.
- denotes a binary decision variable that is set to be 1 if bike trailer v picks up bikes from station s in at decision epoch t and returns bikes to station in at decision epoch else 0 otherwise.
- denotes the number of hired bikes moving from station s at decision epoch t to station at decision epoch .
4. Constraints
4.1. C1: Preservation of Bike Flows in and Out of Station
4.2. C2: Preservation of Bikes Flows between Any Two Stations Follow the Transition Dynamics Observed in the Data
4.3. C3: Value of Task for Bike Trailer
4.4. C4: Ensuring the Budget Feasibility
4.5. C5: Preservation of Bikes Flows in and Out of Vehicles
4.6. C6: Preservation of Vehicles Flows in and Out of Stations
4.7. C7: A Maximum of One Vehicle Can Be Present in One Station at Any Time Step
4.8. C8: Vehicles Can Only Pick Bikes Up or Drop Bikes Off at a Station If They Are Present at That Station
4.9. C9: Trailer Capacity Is Not Exceeded While Picking Up Bikes
4.10. C10: Total Number of Bikes Picked Up from a Station Is Less Than the Number of Available Bikes
4.11. C11: Station Capacity Is Not Exceeded While Dropping Off Bikes
4.12. C12: Total Traveling Distance for a Trailer Is Bounded by a Threshold Value
4.13. C13: A Trailer Can Only Pick Bikes Up or Drop Bikes Off at Exactly One Station
4.14. C14: A Trailer Should Return the Exact Number of Bikes Picked Up
4.15. C15: Station and Vehicle Capacities Are Not Exceeded When Repositioning Bikes
5. Our DRRPVT Approach
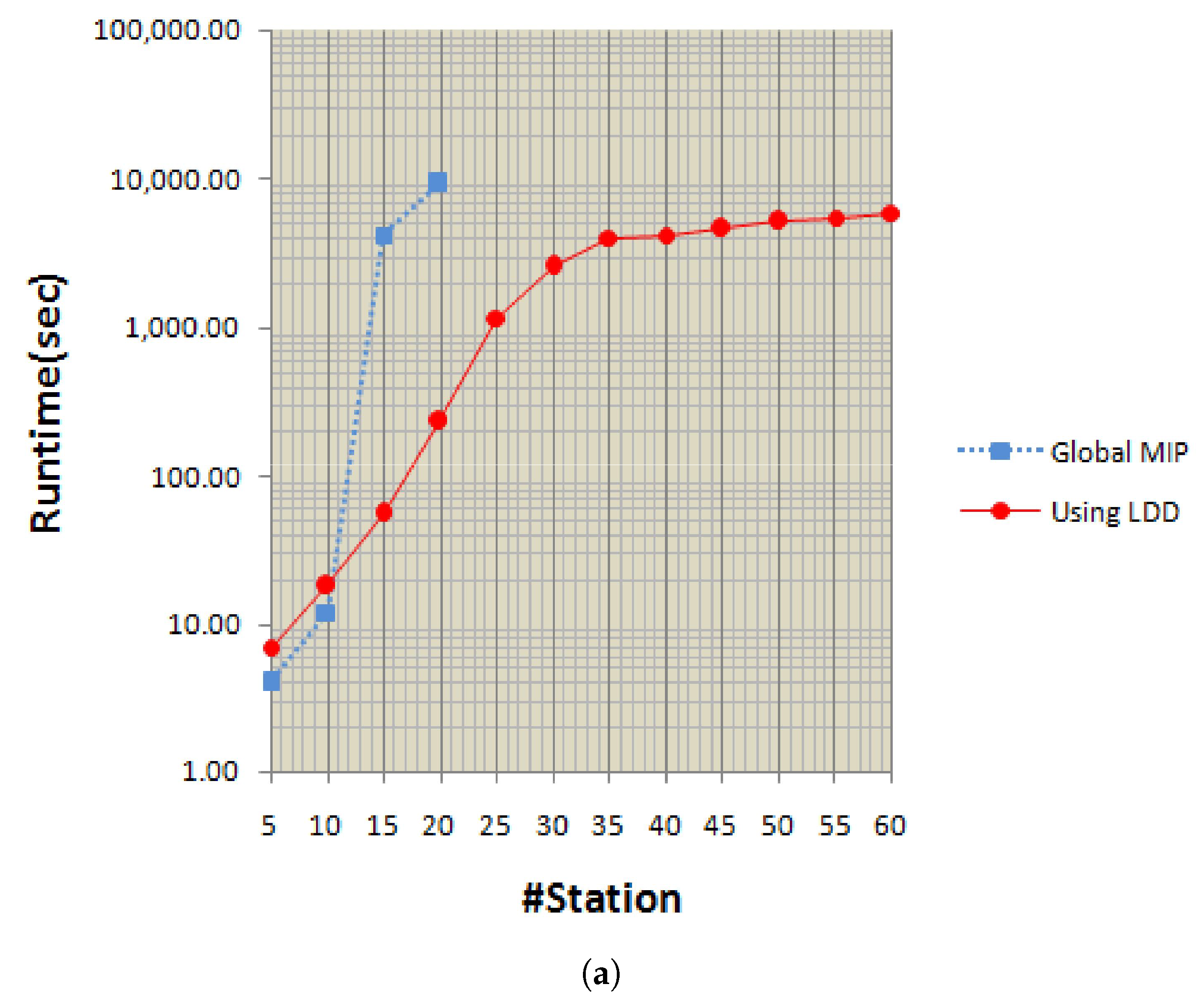
- Identifying the right constraints to be dualized: This step is crucial to ensure that the resulting subproblems are easy to solve and the resulting bound derived from the dual solution is tight during the LDD process. If the right constraints are not dualized, then the underlying Lagrangian-based optimization may not be decomposable or it may take significantly more time than the original MILP to find the desired solution.
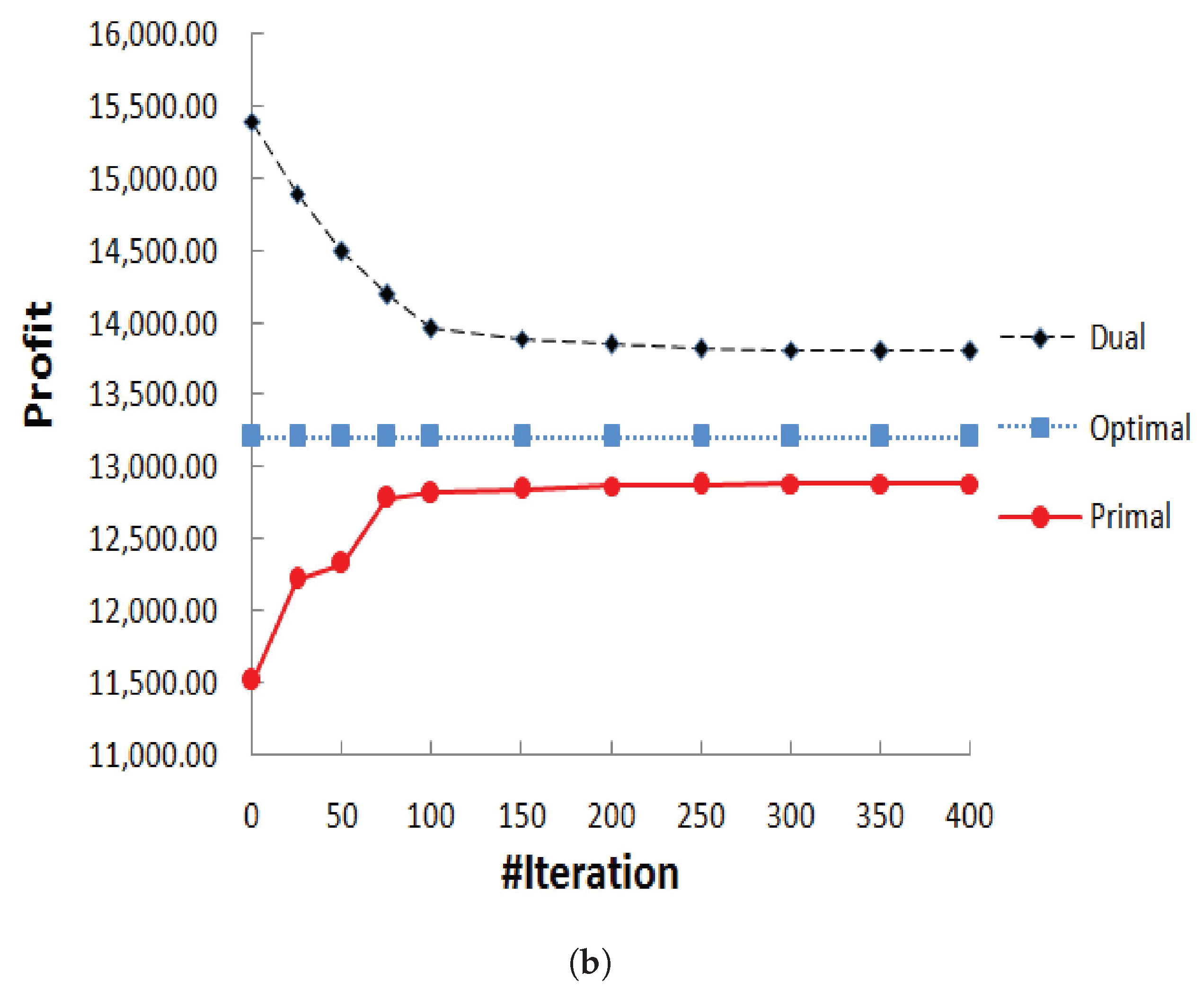
- Extraction of a primal solution from an infeasible dual solution: The primal extraction process is important to derive a valid bound (heuristic solution) during the LDD process. In many cases, the solution obtained by solving the decomposed dual slaves can be infeasible with respect to the original formulation and, hence, the overall approach can potentially lead to slower convergence and poor solutions.
| Algorithm 1 An overview of our DRRPVT approach |
| Input: Output: 1: () 2: , 3: whiledo 4: 5: 6: 7: 8: 9: end while 10: () |
5.1. Calculating Main Stations
5.2. Repositioning Bikes and Routing for Vehicles
- capture the solution to the repositioning problem.
- z captures the solution to the routing problem.
5.3. Incentivize Trailer Tasks
6. Experiments
6.1. Data Set and Criteria
6.2. Comparison against Baselines
6.3. Utility of DRRPVT
6.4. Theorem
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tsai, M.; Chen, P.; Hong, Y.J. Enhancing the utilization of public bike sharing systems using return anxiety information. Future Gener. Comp. Syst. 2019, 92, 961–971. [Google Scholar] [CrossRef]
- Hulot, P.; Aloise, D.; Jena, S.D. Towards Station-Level Demand Prediction for Effective Rebalancing in Bike-Sharing Systems. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining 2018, London, UK, 19–23 August 2018; pp. 378–386. [Google Scholar]
- Lowalekar, M.; Varakantham, P.; Ghosh, S.; Jena, S.D.; Jaillet, P. Online Repositioning in Bike Sharing Systems. In Proceedings of the Twenty-Seventh International Conference on Automated Planning and Scheduling 2017, Pittsburgh, PA, USA, 18–23 June 2017; pp. 200–208. [Google Scholar]
- Vulcano, G.J.; van Ryzin, G.J.; Ratliff, R. Estimating Primary Demand for Substitutable Products from Sales Transaction Data. Oper. Res. 2012, 60, 313–334. [Google Scholar] [CrossRef]
- Schuijbroek, J.; Hampshire, R.C.; van Hoeve, W. Inventory rebalancing and vehicle routing in bike sharing systems. Eur. J. Oper. Res. 2017, 257, 992–1004. [Google Scholar] [CrossRef]
- Shu, J.; Chou, M.C.; Liu, Q.; Teo, C.; Wang, I. Models for Effective Deployment and Redistribution of Bicycles Within Public Bicycle-Sharing Systems. Oper. Res. 2013, 61, 1346–1359. [Google Scholar] [CrossRef]
- Chen, Q.; Liu, M.; Liu, X. Bike Fleet Allocation Models for Repositioning in Bike-Sharing Systems. IEEE Intell. Transport. Syst. Mag. 2018, 10, 19–29. [Google Scholar] [CrossRef]
- Ghosh, S.; Varakantham, P.; Adulyasak, Y.; Jaillet, P. Dynamic Repositioning to Reduce Lost Demand in Bike Sharing Systems. J. Artif. Intell. Res. 2017, 58, 387–430. [Google Scholar] [CrossRef]
- Pfrommer, J.; Warrington, J.; Schildbach, G.; Morari, M. Dynamic Vehicle Redistribution and Online Price Incentives in Shared Mobility Systems. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1567–1578. [Google Scholar] [CrossRef]
- Ghosh, S.; Varakantham, P. Incentivizing the Use of Bike Trailers for Dynamic Repositioning in Bike Sharing Systems. In Proceedings of the International Conference on Automated Planning and Scheduling 2017, Pittsburgh, PA, USA, 18–23 June 2017; pp. 373–381. [Google Scholar]
- Ghosh, S.; Trick, M.; Varakantham, P. Robust Repositioning to Counter Unpredictable Demand in Bike Sharing Systems. In Proceedings of the International Joint Conference on Artificial Intelligence, New York, NY, USA, 9–15 July 2016; pp. 3096–3102. [Google Scholar]
- Ruffieux, S.; Mugellini, E.; Khaled, O.A. Predictive Modeling for Optimization of Field Operations in Bike-Sharing Systems. In Proceedings of the 6th Swiss Conference on Data Science, SDS 2019, Bern, Switzerland, 14 June 2019; pp. 119–124. [Google Scholar] [CrossRef]
- Liu, J.; Sun, L.; Chen, W.; Xiong, H. Rebalancing Bike Sharing Systems: A Multi-source Data Smart Optimization. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 1005–1014. [Google Scholar] [CrossRef]
- Ghosh, S.; Koh, J.Y.; Jaillet, P. Improving Customer Satisfaction in Bike Sharing Systems through Dynamic Repositioning. In Proceedings of the International Joint Conference on Artificial Intelligence, Macao, China, 14–16 August 2019; pp. 5864–5870. [Google Scholar]
- Liu, Z.; Yu, H.; Wang, L.; Hu, L.; Yang, Q. Ethically Aligned Mobilization of Community Effort to Reposition Shared Bikes. In Proceedings of the AAAI, Honolulu, HI, USA, 14 June 2019. [Google Scholar]
- Lin, J.; Yang, T.; Chang, Y. A hub location inventory model for bicycle sharing system design: Formulation and solution. Comput. Ind. Eng. 2013, 65, 77–86. [Google Scholar] [CrossRef]
- Chemla, D.; Meunier, F.; Calvo, R.W. Bike sharing systems: Solving the static rebalancing problem. Discret. Optim. 2013, 10, 120–146. [Google Scholar] [CrossRef]
- Gaspero, L.D.; Rendl, A.; Urli, T. Balancing bike sharing systems with constraint programming. Constraints 2016, 21, 318–348. [Google Scholar] [CrossRef]
- Wang, N.; Zgaya, H.; Mathieu, P.; Hammadi, S. An Agent-Based Distributed Approach for Bike Sharing Systems. In Proceedings of the ICCS, Cambridge, MA, USA, 22–27 July 2018; pp. 540–552. [Google Scholar]
- Singla, A.; Santoni, M.; Bartók, G.; Mukerji, P.; Meenen, M.; Krause, A. Incentivizing Users for Balancing Bike Sharing Systems. In Proceedings of the AAAI, Austin, TX, USA, 25–30 January 2015; pp. 723–729. [Google Scholar]
- Liu, Z.; Yu, H.; Wang, L.; Hu, L.; Yang, Q. Social Mobilization to Reposition Indiscriminately Parked Shareable Bikes. In Proceedings of the AAMAS, Montreal, QC, Canada, 13–17 May 2019; pp. 2099–2101. [Google Scholar]
- Hartuv, E.; Agmon, N.; Kraus, S. Scheduling Spare Drones for Persistent Task Performance under Energy Constraints. In Proceedings of the AAMAS, Stockholm, Sweden, 10–15 July 2018; pp. 532–540. [Google Scholar]
- Zhang, R.; Pavone, M. Control of Robotic Mobility-On-Demand Systems: A Queueing-Theoretical Perspective. Int. J. Robot. Res. 2016, 35, 186–203. [Google Scholar] [CrossRef]
- Ghosh, S.; Varakantham, P. Dispatch Guided Allocation Optimization for Effective Emergency Response. In Proceedings of the AAAI, New Orleans, LA, USA, 2–7 February 2018; pp. 775–783. [Google Scholar]
- Konda, M.; Ghosh, S.; Varakantham, P. Reserved Optimisation: Handling Incident Priorities in Emergency Response Systems. In Proceedings of the ICAPS, Delft, The Netherlands, 24–29 June 2018; pp. 330–338. [Google Scholar]
- Jha, S.S.; Cheng, S.; Lowalekar, M.; Wong, N.; Rajendram, R.; Tran, T.K.; Varakantham, P.; Truong, T.N.; Rahman, F.B.A. Upping the Game of Taxi Driving in the Age of Uber. In Proceedings of the AAAI, New Orleans, LA, USA, 2–7 February 2018; pp. 7779–7785. [Google Scholar]
- Cavallo, R. Mechanism design for dynamic settings. SIGecom Exch. 2009, 8, 7. [Google Scholar] [CrossRef]
- Do, L.; Lauw, H.W.; Wang, K. Mining Revenue-Maximizing Bundling Configuration. Proc. VLDB Endow. 2015, 8, 593–604. [Google Scholar] [CrossRef][Green Version]
- Zhuo, H.H.; Yang, Q. Action-model acquisition for planning via transfer learning. Artif. Intell. 2014, 212, 80–103. [Google Scholar] [CrossRef]
- Zhuo, H.H.; Kambhampati, S. Model-lite planning: Case-based vs. model-based approaches. Artif. Intell. 2014, 246, 1–21. [Google Scholar] [CrossRef]
- Zhuo, H.H.; Muñoz-Avila, H.; Yang, Q. Learning hierarchical task network domains from partially observed plan traces. Artif. Intell. 2014, 212, 134–157. [Google Scholar] [CrossRef]
- Zhuo, H.H.; Zha, Y.; Kambhampati, S. Discovering Underlying Plans Based on Shallow Models. ACM Trans. Intell. Syst. Technol. 2020, 11, 18:1–18:30. [Google Scholar] [CrossRef]
- Zhuo, H.H. Human-Aware Plan Recognition. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; pp. 3686–3693. [Google Scholar]
- Zhuo, H.H. Recognizing Multi-Agent Plans When Action Models and Team Plans Are Both Incomplete. ACM Trans. Intell. Syst. Technol. 2019, 10, 30:1–30:24. [Google Scholar] [CrossRef]
- Feng, W.; Zhuo, H.H.; Kambhampati, S. Extracting Action Sequences from Texts Based on Deep Reinforcement Learning. In Proceedings of the International Joint Conferences on Artifical Intelligence (IJCAI), Stockholm, Sweden, 13–19 July 2018; pp. 4064–4070. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Sets | ||||
|---|---|---|---|---|
| Hubway | 2.42% | 23.57% | 2.18% | 26.91% |
| Capital Bikeshare | 1.97% | 14.42% | 1.25% | 17.38% |
| Data Sets | ||||
|---|---|---|---|---|
| Hubway | 4.63% | 29.71% | 4.26% | 31.12% |
| Capital Bikeshare | 4.25% | 19.39% | 4.11% | 24.45% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, X.; Tang, M.; Liu, Y.; Xian, Z.; Zhuo, H.H. Repositioning Bikes with Carrier Vehicles and Bike Trailers in Bike Sharing Systems. Appl. Sci. 2021, 11, 7227. https://doi.org/10.3390/app11167227
Zheng X, Tang M, Liu Y, Xian Z, Zhuo HH. Repositioning Bikes with Carrier Vehicles and Bike Trailers in Bike Sharing Systems. Applied Sciences. 2021; 11(16):7227. https://doi.org/10.3390/app11167227
Chicago/Turabian StyleZheng, Xinghua, Ming Tang, Yuechang Liu, Zhengzheng Xian, and Hankz Hankui Zhuo. 2021. "Repositioning Bikes with Carrier Vehicles and Bike Trailers in Bike Sharing Systems" Applied Sciences 11, no. 16: 7227. https://doi.org/10.3390/app11167227
APA StyleZheng, X., Tang, M., Liu, Y., Xian, Z., & Zhuo, H. H. (2021). Repositioning Bikes with Carrier Vehicles and Bike Trailers in Bike Sharing Systems. Applied Sciences, 11(16), 7227. https://doi.org/10.3390/app11167227